以下、図面を参照しながら、本発明の第1実施形態に係る排ガス浄化装置の劣化判定装置について説明する。図1に示すように、本実施形態の劣化判定装置1は、ECU2を備えており、このECU2は、内燃機関(以下「エンジン」という)3の空燃比制御などの各種の制御処理を実行するとともに、後述するように、排ガス浄化装置10の劣化判定処理を実行する。
エンジン3は、図示しない車両に搭載されたディーゼルエンジンタイプのものであり、複数組(1組のみ図示)の気筒3aおよびピストン3bを備えている。エンジン3のシリンダヘッド3cには、燃料噴射弁4が気筒3a毎に燃焼室に臨むように取り付けられている。
この燃料噴射弁4は、コモンレールを介して、高圧ポンプおよび燃料タンク(いずれも図示せず)に接続されている。高圧ポンプによって昇圧された燃料は、コモンレールを介して燃料噴射弁4に供給され、燃料噴射弁4から気筒3a内に噴射される。燃料噴射弁4の開弁時間および開弁タイミングは、ECU2によって制御され、それにより、空燃比制御が実行される。この空燃比制御によって、エンジン3は、通常時は理論空燃比よりもリーンな混合気を燃焼させるリーン燃焼状態で運転され、後述するリッチスパイク制御時には、リッチな混合気を燃焼させるリッチ燃焼状態で運転される。
エンジン3には、クランク角センサ20が設けられている。このクランク角センサ20は、マグネットロータおよびMREピックアップで構成されており、クランクシャフト3dの回転に伴い、いずれもパルス信号であるCRK信号およびTDC信号をECU2に出力する。このCRK信号は、所定クランク角(例えば10゜)毎に1パルスが出力され、ECU2は、このCRK信号に基づき、エンジン3の回転数(以下「エンジン回転数」という)NEを算出する。また、TDC信号は、各気筒3aのピストン3bが吸気行程のTDC位置よりも若干、手前の所定のクランク角位置にあることを表す信号であり、所定クランク角毎に1パルスが出力される。
エンジン3の吸気通路5には、エアフローセンサ21が設けられており、このエアフローセンサ21は、気筒内に吸入される空気量(以下「吸入空気量」という)GAIRを検出し、それを表す検出信号をECU2に出力する。
一方、エンジン3の排気通路7には、排ガス浄化装置10が設けられており、この排ガス浄化装置10は、上流側から順に排気通路7に配置された上流側触媒11および下流側触媒12を備えている。この上流側触媒11は、酸素貯蔵能を有する三元触媒で構成され、その温度が後述する第1所定温度TREF1以上である場合には、活性化して排気ガス中の有害な未燃成分を浄化する。
また、下流側触媒12は、NOx浄化触媒で構成されており、酸化雰囲気の排ガスが流入したときに、排ガス中のNOxを捕捉(貯蔵)する能力と、排ガス中の酸素を貯蔵する酸素貯蔵能とを有している。
さらに、排気通路7には、上流側LAFセンサ22が上流側触媒11の上流側に、中間LAFセンサ23が上流側触媒11と下流側触媒12の間に、下流側LAFセンサ24が下流側触媒12の下流側にそれぞれ設けられている。
これらのLAFセンサ22〜24の各々は、ジルコニアおよび白金電極などで構成され、理論空燃比よりもリッチなリッチ領域から極リーン領域までの広範囲な空燃比の領域において、排気通路7内を流れる排ガス中の酸素濃度をリニアに検出し、それを表す検出信号をECU2に出力する。
ここで、排ガス中の酸素濃度が、排ガス中の還元剤(未燃燃料)と酸素との質量比(燃空比)に対して極めて高い相関性があることは周知であり、それに起因して、両者の一方から他方を精度よく推定(算出)できることも周知である。以上の原理により、ECU2は、上流側LAFセンサ22の検出信号の値に基づいて、上流側触媒11よりも上流側の排ガス中の還元剤と酸素との質量比を当量比に換算した値である第1当量比KACT1を算出し、中間LAFセンサ23の検出信号の値に基づいて、上流側触媒11と下流側触媒12との間の排ガス中の還元剤と酸素との質量比を当量比に換算した値である第2当量比KACT2を算出する。さらに、ECU2は、下流側LAFセンサ24の検出信号の値に基づいて、下流側触媒12よりも下流側の排ガス中の還元剤と酸素との質量比を当量比に換算した値である第3当量比KACT3を算出する。
なお、本実施形態では、中間LAFセンサ23が中間濃度パラメータ検出手段に相当し、第2当量比KACT2が中間濃度パラメータに相当し、下流側LAFセンサ24が下流側濃度パラメータ検出手段に相当し、第3当量比KACT3が下流側濃度パラメータに相当する。
また、上流側触媒11には、触媒温センサ25が取り付けられており、この触媒温センサ25は、上流側触媒11の温度(以下「触媒温」という)TCATを検出して、それを表す検出信号をECU2に出力する。なお、本実施形態では、触媒温センサ25が温度パラメータ検出手段に相当し、触媒温TCATが温度パラメータに相当する。
さらに、エンジン3には、排気還流機構8が設けられている。この排気還流機構8は、排気通路7内の排ガスの一部を吸気通路5側に還流するものであり、吸気通路5および排気通路7の間に接続されたEGR通路8aと、このEGR通路8aを開閉するEGR制御弁8bなどで構成されている。EGR通路8aの一端は、排気通路7の上流側触媒11よりも上流側の部位に開口し、他端は、吸気通路5のエアフローセンサ21よりも下流側の部位に開口している。
EGR制御弁8bは、そのリフトが最大値と最小値との間でリニアに変化するリニア電磁弁で構成され、ECU2に電気的に接続されている。ECU2は、EGR制御弁8bを介して、EGR通路8aの開度を変化させることにより、排ガスの還流量すなわちEGR量を制御する。
さらに、ECU2には、アクセル開度センサ26が電気的に接続されている。このアクセル開度センサ26は、車両の図示しないアクセルペダルの踏み込み量(以下「アクセル開度」という)APを検出して、それを表す検出信号をECU2に出力する。
一方、ECU2は、CPU、RAM、ROMおよびI/Oインターフェース(いずれも図示せず)などからなるマイクロコンピュータで構成されており、前述した各種のセンサ20〜26の検出信号などに応じて、エンジン3の運転状態を判別するとともに、各種の制御処理などを実行する。具体的には、以下に述べるように、空燃比制御処理などを実行するとともに、排ガス浄化装置10における下流側触媒12の劣化判定処理を行う。
なお、本実施形態では、ECU2が、中間濃度パラメータ検出手段、下流側濃度パラメータ検出手段、劣化判定手段、活性状態判定手段、禁止手段および雰囲気制御手段に相当する。
以下、図2を参照しながら、ECU2によって実行される空燃比制御処理について説明する。この処理は、燃料噴射弁4による燃料噴射量QINJおよび燃料噴射タイミングφINJを算出するとともに、EGR制御弁8bを介してEGR量を制御するものであり、TDC信号の発生に同期する制御周期で実行される。
この処理では、まず、ステップ1(図では「S1」と略す。以下同じ)で、リッチ条件フラグF_RICHが「1」であるか否かを判別する。このリッチ条件フラグF_RICHは、図示しない判定処理において、リッチスパイク制御の実行条件が成立したときに「1」に設定され、それ以外のときには「0」に設定される。
ステップ1の判別結果がNOのときには、空燃比のリーン制御を実行すべきであると判定して、ステップ2に進み、リーン制御処理を実行する。このリーン制御処理では、アクセル開度APおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、リーン制御用の要求トルクPMCMDが算出され、このリーン制御用の要求トルクPMCMDおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、リーン制御用の燃料噴射量QINJが算出される。さらに、このリーン制御用の燃料噴射量QINJおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、リーン制御用の燃料噴射タイミングφINJが算出される。
これに加えて、リーン制御用の要求トルクPMCMDおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、リーン制御用の目標吸入空気量GAIR_CMDが算出され、吸入空気量GAIRがこの目標吸入空気量GAIR_CMDに収束するように、EGR制御弁8bがフィードバック制御される。
ステップ2のリーン制御処理を以上のように実行した後、本処理を終了する。これにより、エンジン3の空燃比が理論空燃比よりもリーン側の値になるように制御される。
一方、ステップ1の判別結果がYESのときには、空燃比のリッチスパイク制御を実行すべきであると判定して、ステップ3に進み、リッチスパイク制御処理を実行する。このリッチスパイク制御処理では、アクセル開度APおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、リッチスパイク制御用の要求トルクPMCMDが算出され、このリッチスパイク制御用の要求トルクPMCMDおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、リッチスパイク制御用の燃料噴射量QINJが算出される。さらに、このリッチスパイク制御用の燃料噴射量QINJおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、リッチスパイク制御用の燃料噴射タイミングφINJが算出される。
これに加えて、リッチスパイク制御用の要求トルクPMCMDおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、リッチスパイク制御用の目標吸入空気量GAIR_CMDが算出され、吸入空気量GAIRがこの目標吸入空気量GAIR_CMDに収束するように、EGR制御弁8bがフィードバック制御される。
ステップ3のリッチスパイク制御処理を以上のように実行した後、本処理を終了する。これにより、エンジン3の空燃比が理論空燃比よりもリッチ側の値になるように制御される。
次に、図3を参照しながら、ECU2によって実行される劣化判定処理について説明する。この処理は、下流側触媒12の酸素貯蔵能に基づいて、その劣化判定を行うものであり、所定の制御周期(例えば10msec)で実行される。
この処理では、まず、ステップ10で、触媒活性フラグF_ACTが「1」であるか否かを判別する。この触媒活性フラグF_ACTは、上流側触媒11が適切な活性状態にあるか否を表すものであり、その値は、具体的には図4に示す活性判定処理において設定される。
この活性判定処理では、まず、ステップ30で、TREF1≦TCAT≦TREF2が成立しているか否かを判別する。ここで、2つの値TREF1,TREF2は、触媒温TCATの第1所定値および第2所定値であり、TREF1<TREF2が成立するように設定される。また、第1所定値TREF1は、上流側触媒11が活性状態にあると推定される触媒温TCATの下限値(例えば400℃)に設定され、第2所定値TREF2は、触媒温TCATがこの値よりも高い場合、上流側触媒11の活性度合が高すぎることで、これを通過した排ガスの活性度合が高すぎる状態となるような温度(例えば600℃)に設定されている。
ステップ30の判別結果がYESのときには、上流側触媒11が適切な活性状態にあると判定して、ステップ31に進み、それを表すために、触媒活性フラグF_ACTを「1」に設定する。その後、本処理を終了する。
一方、ステップ30の判別結果がNOのときには、上流側触媒11が活性状態にないか、または上流側触媒11の活性度合が高すぎることで、上流側触媒11が適切な活性状態にないと判定して、ステップ32に進み、それを表すために、触媒活性フラグF_ACTを「0」に設定する。その後、本処理を終了する。
図3に戻り、ステップ10の判別結果がNOのときには、下流側触媒12の劣化判定を実行すべきでないと判定して、そのまま本処理を終了する。
一方、ステップ10の判別結果がYESで、上流側触媒11が適切な活性状態にあるときには、ステップ11に進み、判定条件成立フラグF_JUDが「1」であるか否かを判別する。この判定条件成立フラグF_JUDは、図示しない判定処理において、リッチ条件フラグF_RICH=1であることなどの、下流側触媒12の劣化判定条件が成立しているときに「1」に設定され、それ以外のときには「0」に設定される。
ステップ11の判別結果がNOのときには、下流側触媒12の劣化判定を実行すべきでないと判定して、そのまま本処理を終了する。
一方、ステップ11の判別結果がYESで、下流側触媒12の劣化判定条件が成立しているときには、ステップ12に進み、第3還元剤量積算値sumkact3が所定値krefよりも大きいか否かを判別する。この判別結果がNOのときには、ステップ13に進み、第2還元剤量積算値sumkact2を算出する。この第2還元剤量積算値sumkact2の算出処理は、具体的には図5に示すように実行される。
まず、ステップ40で、第2偏差DK2を、第2当量比KACT2と値1.0との偏差(KACT2−1.0)に設定する。次いで、ステップ41に進み、第2偏差DK2が値0よりも大きいか否かを判別する。
この判別結果がNOで、DK2≦0のときには、ステップ42に進み、第2還元剤量積算値sumkact2を値0に設定した後、本処理を終了する。
一方、ステップ41の判別結果がYESで、DK2>0のときには、第2還元剤量積算値sumkact2を算出すべきであると判定して、ステップ43に進み、下式(1)により、第2還元剤量積算値sumkact2を算出した後、本処理を終了する。
ここで、sumkact2Zは第2還元剤量積算値sumkact2の前回値である。
以上のように、第2還元剤量積算値sumkact2は、DK2>0すなわちKACT2>1.0であるときに、第2偏差DK2と吸入空気量GAIRの積を積算することによって算出されるので、この第2還元剤量積算値sumkact2は、下流側触媒12に流入する排ガスが還元雰囲気になった時点からの、下流側触媒12に流入した還元剤の総量を表す値として算出される。
図3に戻り、ステップ13で以上のように第2還元剤量積算値sumkact2を算出した後、ステップ14に進み、第3還元剤量積算値sumkact3を算出する。この第3還元剤量積算値sumkact3の算出処理は、具体的には図6に示すように実行される。
まず、ステップ50で、第3偏差DK3を、第3当量比KACT3と値1.0との偏差(KACT3−1.0)に設定する。次いで、ステップ51に進み、第3偏差DK3が値0よりも大きいか否かを判別する。
この判別結果がNOで、DK3≦0のときには、ステップ52に進み、第3還元剤量積算値sumkact3を値0に設定した後、本処理を終了する。
一方、ステップ51の判別結果がYESで、DK3>0のときには、第3還元剤量積算値sumkact3を算出すべきであると判定して、ステップ53に進み、下式(2)により、第3還元剤量積算値sumkact3を算出した後、本処理を終了する。
ここで、sumkact3Zは第3還元剤量積算値sumkact3の前回値である。
以上のように、第3還元剤量積算値sumkact3は、DK3>0すなわちKACT3>1.0であるときに、第3偏差DK3と吸入空気量GAIRの積を積算することによって算出されるので、この第3還元剤量積算値sumkact3は、下流側触媒12を通過した排ガスが還元雰囲気になった時点からの、下流側触媒12を通過した還元剤の総量を表す値として算出される。
図3に戻り、ステップ14で以上のように第3還元剤量積算値sumkact3を算出した後、本処理を終了する。
一方、ステップ12の判別結果がYESで、sumkact3>krefのときには、下流側触媒12に貯蔵されていた酸素が、下流側触媒12を通過した還元雰囲気の排ガスとの酸化作用によってすべて消費されたと判定して、ステップ15に進み、第2当量比偏差DKACT2が所定値KREF2未満であるか否かを判別する。この第2当量比偏差DKACT2は、第2当量比の今回値と前回値との偏差の絶対値|KACT2−KACT2Z|として算出される。
ステップ15の判別結果がNOで、DKACT2≧KREF2のときには、第2当量比KACT2が過渡状態にあると判定して、後述するステップ17に進む。一方、ステップ15の判別結果がYESで、DKACT2<KREF2のときには、第2当量比KACT2が定常状態にあると判定して、ステップ16に進み、第2当量比KACT2の平均値(以下「第2当量比平均値」という)avekact2を算出する。この第2当量比平均値avekact2の算出処理は、具体的には以下に述べるように実行される。
すなわち、DKACT2<KREF2が成立した時点以降の第2当量比KACT2を、制御タイミング毎にサンプリングし、第2当量比KACT2のサンプリング数が所定値n(例えば値100)に達したときに、n個のサンプリング値を相加平均演算することによって、第2当量比平均値avekact2を算出する。これに加えて、第2当量比平均値avekact2の算出が終了した時点で、それを表すために、第2平均演算終了フラグF_AVE2を「1」に設定する。
ステップ15または16に続くステップ17で、第3当量比偏差DKACT3が所定値KREF3未満であるか否かを判別する。この第3当量比偏差DKACT3は、第3当量比の今回値と前回値との偏差の絶対値|KACT3−KACT3Z|として算出される。
ステップ17の判別結果がNOで、DKACT3≧KREF3のときには、第3当量比KACT3が過渡状態にあると判定して、後述するステップ19に進む。一方、ステップ17の判別結果がYESで、DKACT3<KREF3のときには、第3当量比KACT3が定常状態にあると判定して、ステップ18に進み、第3当量比KACT3の平均値(以下「第3当量比平均値」という)avekact3を算出する。この第3当量比平均値avekact3の算出処理は、具体的には以下に述べるように実行される。
すなわち、DKACT3<KREF3が成立した時点以降の第3当量比KACT3を、制御タイミング毎にサンプリングし、第3当量比KACT3のサンプリング数が前述した所定値nに達したときに、n個のサンプリング値を相加平均演算することによって、第3当量比平均値avekact3を算出する。これに加えて、第3当量比平均値avekact3の算出が終了した時点で、それを表すために、第3平均演算終了フラグF_AVE3を「1」に設定する。
ステップ17または18に続くステップ19で、第2および第3平均演算終了フラグF_AVE2,F_AVE3がいずれも「1」であるか否かを判別する。この判別結果がNOで、第2および第3当量比平均値avekact2,avekact3の少なくとも一方が算出されていないときには、そのまま本処理を終了する。
一方、ステップ19の判別結果がYESで、第2および第3当量比平均値avekact2,avekact3の双方を算出済みであるときには、ステップ20に進み、第2および第3平均演算終了フラグF_AVE2,F_AVE3を双方とも「0」に設定する。
次いで、ステップ21に進み、触媒劣化フラグF_CATNGの設定処理を実行する。この設定処理は、具体的には図7に示すように実行される。
まず、ステップ60で、下式(3)により、触媒酸素貯蔵能OSCを算出する。
この触媒酸素貯蔵能OSCは、下流側触媒12の酸素貯蔵能を表すものであり、その算出式として上式(3)を用いるのは以下の理由による。すなわち、上式(3)を変形すると、下式(4)が得られる。
この式(4)を参照すると明らかなように、その右辺の括弧内の第2項は、2つの当量比平均値の比avekact2/avekact3を第3還元剤量積算値sumkact3に乗算した値であり、これは、中間LAFセンサ23の出力と下流側LAFセンサ24の出力とが互いに同じ感度になるように、第3還元剤量積算値sumkact3をゲイン補正した値に相当する。
ここで、前述したように、第2還元剤量積算値sumkact2は、下流側触媒12に流入する排ガスが還元雰囲気になった時点からの、下流側触媒12に流入した還元剤の総量を表しており、第3還元剤量積算値sumkact3は、下流側触媒12を通過した排ガスが還元雰囲気になった時点からの、下流側触媒12を通過した還元剤の総量を表している。そのため、第2還元剤量積算値sumkact2と、上記のようにゲイン補正した第3還元剤量積算値sumkact3との偏差(すなわち式(4)の右辺の括弧内の値)は、還元雰囲気の排ガスが下流側触媒12を通過した際、下流側触媒12に貯蔵されている酸素によって酸化された還元剤の総量を表すことになる。したがって、前述した式(4)すなわち式(3)の場合、そのような偏差を第2当量比平均値avekact2で除算することによって、触媒酸素貯蔵能OSCが算出されるので、触媒酸素貯蔵能OSCを下流側触媒12の酸素貯蔵能を適切に表す値として算出できる。以上の理由により、本実施形態では、触媒酸素貯蔵能OSCが式(3)によって算出される。
ステップ60に続くステップ61で、触媒酸素貯蔵能OSCが所定の判定値OSCJUDよりも大きいか否かを判別する。この判別結果がYESで、OSC>OSCJUDであるときには、下流側触媒12が劣化していないと判定して、ステップ62に進み、それを表すために、触媒劣化フラグF_CATNGを「0」に設定する。その後、本処理を終了する。
一方、ステップ61の判別結果がNOで、OSC≦OSCJUDであるときには、下流側触媒12が劣化したと判定して、ステップ63に進み、それを表すために、触媒劣化フラグF_CATNGを「1」に設定する。その後、本処理を終了する。
図3に戻り、ステップ21で以上のように触媒劣化フラグF_CATNGを設定した後、本処理を終了する。
以上のように、第1実施形態の劣化判定装置1によれば、ステップ10の判別結果がYESで、上流側触媒11が適切な活性状態にあるときには、下流側触媒12の劣化判定が実行される一方、ステップ10の判別結果がNOで、上流側触媒11が適切な活性状態にないときには、下流側触媒12の劣化判定が禁止される。それにより、上流側触媒11が活性状態にないことに起因する誤判定を回避しながら、下流側触媒12の劣化判定を実行することができ、判定精度を向上させることができる。
また、触媒活性フラグF_ACTは、触媒温TCATが第1所定値TREF1を下限とし第2所定値TREF2を上限とする範囲(TREF1≦TCAT≦TREF2)内にあるか否かに基づいて設定される。この場合、第1所定値TREF1は、上流側触媒11が活性状態にあると推定される触媒温TCATの下限値であるので、上流側触媒11が活性状態にないことに起因する誤判定を回避することができる。これに加えて、第2所定値TREF2は、上流側触媒11の活性度合が高すぎるような触媒温TCATに設定されているので、上流側触媒11の活性度合が高すぎることに起因する誤判定も回避することができる。以上により、下流側触媒12の劣化判定の精度をさらに向上させることができる。
なお、第1実施形態は、上流側触媒として三元触媒タイプのものを用いた例であるが、本発明の上流側触媒はこれに限らず、排ガスを浄化できるものであればよい。また、第1実施形態は、下流側触媒としてNOx浄化触媒を用いた例であるが、本発明の下流側触媒はこれに限らず、排ガスを浄化できるとともに酸素貯蔵能を有するものであればよい。例えば、三元触媒を下流側触媒として用いてもよい。
また、第1実施形態は、中間濃度パラメータ検出手段として中間LAFセンサ23を用いた例であるが、本発明の中間濃度パラメータ検出手段はこれに限らず、上流側触媒と下流側触媒の間の排ガス中の所定成分の濃度を表す中間濃度パラメータを検出可能なものであればよい。例えば、中間濃度パラメータ検出手段として、排ガス中のNOx濃度に加えて酸素濃度もリニアに検出するNOx濃度センサや、排ガスの空燃比が理論空燃比からリッチ側に変化したときに検出値が所定の勾配を示すような酸素濃度センサなどを用いてもよい。
さらに、第1実施形態は、下流側濃度パラメータ検出手段として下流側LAFセンサ24を用いた例であるが、本発明の下流側濃度パラメータ検出手段はこれに限らず、下流側触媒の下流側の排ガス中の所定成分の濃度を表す下流側濃度パラメータを検出可能なものであればよい。例えば、下流側濃度パラメータ検出手段として、排ガス中のNOx濃度に加えて酸素濃度もリニアに検出するNOx濃度センサや、排ガスの空燃比が理論空燃比からリッチ側に変化したときに検出値が所定の勾配を示すような酸素濃度センサなどを用いてもよい。
一方、第1実施形態は、温度パラメータ検出手段として触媒温センサ25を用いた例であるが、本発明の温度パラメータ検出手段はこれに限らず、上流側触媒の温度を表す温度パラメータを検出可能なものであればよい。例えば、温度パラメータ検出手段として、上流側触媒11と下流側触媒12の間の排ガス温度を検出する温度センサを用いてもよい。
また、第1実施形態は、上流側触媒11が活性状態にあるか否かを判定する活性判定処理として、図4に示す手法を用いた例であるが、本発明の活性判定処理の手法はこれに限らず、上流側触媒11が活性状態にあるか否かを適切に判定できるものであればよい。例えば、上流側触媒11として、高温領域でも上流側触媒11を通過した排ガスの活性度合が高くなりすぎることがなく、下流側触媒12の劣化判定において誤判定が生じるおそれがないものを用いた場合には、活性判定処理を図8に示すように構成してもよい。
同図に示すように、この活性判定処理は、第1実施形態の図4の処理おけるステップ30を、ステップ70のように変更した点以外は、図4の処理と同じように構成されている。すなわち、この活性判定処理では、ステップ70で、触媒温TCATが第1所定値TREF以上であるか否かを判別し、この判別結果がYESのときには触媒活性フラグF_ACTが「1」に設定され(ステップ71)、それ以外のときには触媒活性フラグF_ACTが「0」に設定される(ステップ72)。以上のように活性判定処理を実行した場合でも、第1実施形態の図4の処理と同様に、上流側触媒11が活性状態にあるか否かを精度よく判定することができ、それにより、第1実施形態と同様の作用効果を得ることができる。
また、活性判定処理を、図4の手法に代えて図9に示すように構成してもよい。この活性判定処理では、まず、ステップ80で、始動後タイマの計数値tm_astを、その前回値tm_astZと値1の和に設定する。この始動後タイマは、エンジン始動後の経過時間を計時するものである。次いで、ステップ81に進み、判定値tm_refを算出する。この判定値tm_refは、具体的には、エンジン回転数NEおよび要求トルクPMCMDに応じて、図示しないマップを検索することにより算出される。なお、判定値tm_refとして一定値を用いてもよい。
次いで、ステップ82に進み、始動後タイマの計数値tm_astが判定値tm_ref以上であるか否かを判別し、この判別結果がYESのときには、エンジン始動後の経過時間が十分に長いことで、上流側触媒11が活性状態にあると判定して、それを表すために、ステップ83で、触媒活性フラグF_ACTを「1」に設定する。その後、本処理を終了する。一方、ステップ82の判別結果がNOのときには、上流側触媒11が活性状態にないと判定して、それを表すために、ステップ84で、触媒活性フラグF_ACTを「0」に設定する。その後、本処理を終了する。
以上のように、図9に示す活性判定処理を実行した場合でも、第1実施形態の図4の手法と同様に、上流側触媒11が活性状態にあるか否かを精度よく判定することができ、それにより、第1実施形態と同様の作用効果を得ることができる。なお、この例では、ECU2が温度パラメータ検出手段に相当し、始動後タイマの計数値tm_astが温度パラメータに相当し、判定値tm_refが第1所定値に相当する。
さらに、活性判定処理を、図4の手法に代えて図10に示すように構成してもよい。この活性判定処理では、まず、ステップ90で、排出熱量QEXHを算出する。この排出熱量QEXHは、エンジン3から排気通路7内に排出されたと推定される熱量に相当するものであり、具体的には、エンジン回転数NEおよび要求トルクPMCMDに応じて、図示しないマップを検索することによって算出される。
次いで、ステップ91に進み、熱量積算値sumQを、その前回値sumQZと排出熱量QEXHの和に設定する。すなわち、熱量積算値sumQは、排出熱量QEXHの積算値として算出される。
次に、ステップ92で、熱量積算値sumQが所定値sref以上であるか否かを判別する。この判別結果がYESのときには、エンジン3から上流側触媒11に供給された総熱量が大きいことで、上流側触媒11が活性状態にあると判定して、それを表すために、ステップ93に進み、触媒活性フラグF_ACTを「1」に設定する。その後、本処理を終了する。一方、ステップ92の判別結果がNOのときには、上流側触媒11が活性状態にないと判定して、それを表すために、ステップ94で、触媒活性フラグF_ACTを「0」に設定する。その後、本処理を終了する。
以上のように、図10に示す活性判定処理を実行した場合でも、第1実施形態の図4の手法と同様に、上流側触媒11が活性状態にあるか否かを精度よく判定することができ、それにより、第1実施形態と同様の作用効果を得ることができる。なお、この例では、ECU2、クランク角センサ20およびアクセル開度センサ26が温度パラメータ検出手段に相当し、熱量積算値sumQが温度パラメータに相当し、所定値srefが第1所定値に相当する。
なお、図10の活性判定処理のステップ90において、上流側触媒11と下流側触媒12の間の排ガス温度および排ガス流量に応じて、上流側触媒11への供給熱量を算出し、この供給熱量を排出熱量QEXHに代えて用いてもよい。このように構成した場合でも、図10の活性判定処理と同様に、上流側触媒11が活性状態にあるか否かを精度よく判定することができる。
また、第1実施形態は、ECU2によって実行される触媒劣化フラグF_CATNGの設定処理を、図7に示すように構成した例であるが、これに代えて、触媒劣化フラグF_CATNGの設定処理を図11に示すように構成してもよい。
この処理では、まず、ステップ100で、触媒酸素貯蔵能の基本値OSCbaseを下式(5)によって算出する。
次いで、ステップ101に進み、触媒温TCATに応じて、図12に示すマップ(1次元マップ)を検索することにより、触媒温補正係数CorTCATを算出する。同図において、TREFmは、TREF1<TREFm<TREF2が成立するように設定される触媒温TCATの所定値である。
このマップでは、触媒温補正係数CorTCATは、TREF1≦TCAT≦TREFmの範囲において、触媒温TCATが低いほど、より大きな値に設定されている。これは、触媒温TCATがTREF1≦TCAT≦TREFmの範囲にある場合、触媒温TCATが低いほど、上流側触媒11の活性度合がより低い状態になるので、それに対応するためである。また、触媒温補正係数CorTCATは、TREFm<TCATの範囲では一定値に設定されており、これは、上流側触媒11の活性度合がTREFm<TCATの範囲において変化しないためである。
ステップ101に続くステップ102で、排ガス流量QGASに応じて、図13に示すマップを検索することにより、排ガス流量補正係数CorQGASを算出する。なお、排ガス流量QGASは、エンジン回転数NEおよび吸入空気量GAIRなどに基づき、質量流量して算出される。このマップでは、排ガス流量補正係数CorQGASは、排ガス流量QGASが大きいほど、より大きい値に設定されている。これは、排ガス流量QGASが大きい場合、排ガスが上流側触媒11を通過する際に上流側触媒11と反応しにくくなり、上流側触媒11を通過した排ガスの活性度合が低くなることに起因して、触媒酸素貯蔵能OSCが実際値よりも小さな値に算出されてしまう状態が発生したり、下流側触媒12自体の排ガスとの反応時間(接触時間)が短くなること、および排ガス中の酸素が下流側触媒12に取り込まれにくくなることに起因して、下流側触媒12に実際に貯蔵される酸素量が低下してしまう状態が発生したりするので、それに対応するためである。
次いで、ステップ103に進み、下式(6)により、触媒酸素貯蔵能OSCを算出する。
次に、ステップ104で、触媒酸素貯蔵能OSCが前述した所定の判定値OSCJUDよりも大きいか否かを判別する。この判別結果がYESで、OSC>OSCJUDであるときには、下流側触媒12が劣化していないと判定して、ステップ105に進み、それを表すために、触媒劣化フラグF_CATNGを「0」に設定する。その後、本処理を終了する。
一方、ステップ104の判別結果がNOで、OSC≦OSCJUDであるときには、下流側触媒12が劣化したと判定して、ステップ106に進み、それを表すために、触媒劣化フラグF_CATNGを「1」に設定する。その後、本処理を終了する。
以上のように、触媒劣化フラグF_CATNGの設定処理を図11に示すように構成した場合、触媒酸素貯蔵能OSCを所定の判定値OSCJUDと比較することによって、下流側触媒12の劣化の有無が判定されるとともに、この触媒酸素貯蔵能OSCが、触媒酸素貯蔵能の基本値OSCbaseを、触媒温補正係数CorTCATおよび排ガス流量補正係数CorQGASで補正することによって算出される。この触媒温補正係数CorTCATは、前述したように、TREF1≦TCAT≦TREFmの範囲において、触媒温TCATが低いほど、より大きくなるように算出されるので、触媒酸素貯蔵能OSCは、上流側触媒11を通過する排ガスの活性度合が低いほど、より大きくなるように算出されることになる。したがって、上流側触媒11を通過する排ガスの活性度合の変化を反映させながら、触媒酸素貯蔵能OSCを算出することができ、それにより、上流側触媒11の温度変化に起因して、上流側触媒11を通過する排ガスの活性度合が変化する場合でも、下流側触媒12の劣化判定を精度よく実行することができる。
また、排ガス流量補正係数CorQGASは、前述したように、排ガス流量QGASが大きいほど、より大きくなるように算出されるので、排ガス流量QGASが大きいことで、排ガスが上流側触媒11を通過する際に上流側触媒11と反応しにくくなり、上流側触媒11を通過した排ガスの活性度合が低くなったときでも、それを反映させながら、触媒酸素貯蔵能OSCを適切に算出することができる。すなわち、上流側触媒11を通過した排ガスの活性度合が低くなったときでも、触媒酸素貯蔵能OSCが実際値よりも小さな値に算出されてしまうのを回避することができる。以上により、排ガス流量QGASの変化に起因して、上流側触媒11に対する排ガスの反応状態が変化する場合でも、下流側触媒12の劣化判定を精度よく実行することができる。
次に、図14を参照しながら、本発明の第2実施形態に係る排ガス浄化装置の劣化判定装置1Aについて説明する。同図に示すように、この劣化判定装置1Aは、第1実施形態の劣化判定装置1と比べると、下流側LAFセンサ24が省略されている点と、中間NOxセンサ30および下流側NOxセンサ31を備えている点以外は、劣化判定装置1と同様に構成されているので、以下、劣化判定装置1と異なる点を中心に説明するとともに、それ以外の構成に関しては説明を省略する。
この劣化判定装置1Aは、中間NOxセンサ30および下流側NOxセンサ31を備えており、これらのNOxセンサ30,31はECU2に電気的に接続されている。中間NOxセンサ30は、排気通路7の上流側触媒11と下流側触媒12の間に設けられており、排ガス中のNOx濃度を検出し、それを表す検出信号をECU2に出力する。ECU2は、この中間NOxセンサ30の検出信号に基づき、2つの触媒11,12間の排ガス中のNOx濃度(以下「中間NOx濃度」という)CNOx_Preを算出する。なお、本実施形態では、中間NOxセンサ30が中間濃度パラメータ検出手段に相当し、中間NOx濃度CNOx_Preが中間濃度パラメータに相当する。
また、下流側NOxセンサ31は、排気通路7の下流側触媒12よりも下流側に設けられており、排ガス中のNOx濃度を検出し、それを表す検出信号をECU2に出力する。ECU2は、この下流側NOxセンサ31の検出信号に基づき、下流側触媒12を通過した排ガス中のNOx濃度(以下「下流側NOx濃度」という)CNOx_Postを算出する。なお、本実施形態では、下流側NOxセンサ31が下流側濃度パラメータ検出手段に相当し、下流側NOx濃度CNOx_Postが下流側濃度パラメータに相当する。
次に、ECU2によって実行される各種の制御処理について説明する。なお、本実施形態では、ECU2が、中間濃度パラメータ検出手段、下流側濃度パラメータ検出手段、劣化判定手段、活性状態判定手段および禁止手段に相当する。
まず、図15を参照しながら、ECU2によって実行される空燃比制御処理について説明する。この処理は、前述した図2の空燃比制御処理と同様に、燃料噴射弁4による燃料噴射量QINJおよび燃料噴射タイミングφINJを算出するとともに、EGR制御弁8bを介してEGR量を制御するものであり、TDC信号の発生に同期する制御周期で実行される。
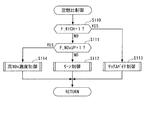
この処理では、まず、ステップ110で、前述したステップ1と同様に、リッチ条件フラグF_RICHが「1」であるか否かを判別する。この判別結果がNOのときには、ステップ111に進み、高NOx条件フラグF_NOxUPが「1」であるか否かを判別する。この高NOx条件フラグF_NOxUPの値は、後述する劣化判定処理において設定される。
ステップ111の判別結果がNOのときには、空燃比のリーン制御を実行すべきであると判定して、ステップ112に進み、前述したステップ2と同様にリーン制御処理を実行した後、本処理を終了する。
一方、ステップ110の判別結果がYESのときには、空燃比のリッチスパイク制御を実行すべきであると判定して、ステップ113に進み、前述したステップ3と同様にリッチスパイク制御処理を実行した後、本処理を終了する。
一方、ステップ111の判別結果がYESのときには、高NOx濃度制御を実行すべきであると判定して、ステップ114に進み、高NOx濃度制御処理を実行する。この高NOx濃度制御処理は、具体的には、図16に示すように実行される。
まず、ステップ120で、前述したリーン制御処理およびリッチスパイク制御処理と同様の手法により、高NOx濃度制御用の燃料噴射量QINJおよび燃料噴射タイミングφINJを算出する。すなわち、アクセル開度APおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、高NOx濃度制御用の要求トルクPMCMDを算出し、この高NOx濃度制御用の要求トルクPMCMDおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、高NOx濃度制御用の燃料噴射量QINJおよび燃料噴射タイミングφINJを算出する。
次に、ステップ121で、高NOx濃度制御用の要求トルクPMCMDおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、高NOx濃度制御用の目標吸入空気量GAIR_CMDを算出する。
次いで、ステップ122に進み、EGR制御処理を実行した後、本処理を終了する。このEGR制御処理では、吸入空気量GAIRが目標吸入空気量GAIR_CMDに収束するように、EGR制御弁8bがフィードバック制御される。それにより、EGR量がリーン制御中よりも減少するように制御され、その結果、エンジン3から排気通路7に排出される排ガス中のNOx濃度が、リーン制御中よりも高い値になるように制御される。
図15に戻り、ステップ114の高NOx濃度制御処理を以上のように実行した後、空燃比制御処理を終了する。
次に、図17を参照しながら、ECU2によって実行される劣化判定処理について説明する。この処理は、中間NOx濃度CNOx_Preと下流側NOx濃度CNOx_Postに基づいて、下流側触媒12の劣化判定を行うものであり、所定の制御周期ΔT(例えば10msec)で実行される。
この処理では、まず、ステップ130で、前述した触媒活性フラグF_ACTが「1」であるか否かを判別する。この触媒活性フラグF_ACTは、第1実施形態の劣化判定装置1と同様に、前述した図4の活性判定処理によって設定される。このステップ130の判別結果がNOで、上流側触媒11が活性状態になっていないときには、下流側触媒12の劣化判定を実行すべきでないと判定して、ステップ131に進み、後述する2つのフラグF_ZERO,F_CALをいずれも「0」に設定した後、本処理を終了する。
一方、ステップ131の判別結果がYESで、上流側触媒11が適切な活性状態にあるときには、ステップ132に進み、判定条件成立フラグF_JUD2が「1」であるか否かを判別する。この判定条件成立フラグF_JUD2は、図示しない判定処理において、以下の条件(f1)〜(f3)がいずれも成立しているときには、下流側触媒12の劣化判定条件が成立しているとして「1」に設定され、それ以外のときには「0」に設定される。
(f1)リッチスパイク制御を終了してから所定時間が経過していること。
(f2)リッチスパイク制御の終了以降、劣化判定処理を実行済みでないこと。
(f3)エンジン3が劣化判定処理を実行可能な運転状態であること。
このステップ132の判別結果がNOで、下流側触媒12の劣化判定条件が成立していないときには、下流側触媒12の劣化判定を実行すべきでないと判定して、前述したステップ131を実行した後、本処理を終了する。
一方、ステップ132の判別結果がYESで、下流側触媒12の劣化判定条件が成立しているときには、ステップ133に進み、ゼロ点補正済みフラグF_ZEROが「1」であるか否かを判別する。この判別結果がNOのときには、下流側NOxセンサ31のゼロ点補正を実行すべきであると判定して、ステップ134に進み、ゼロ点補正処理を以下に述べるように実行した後、本処理を終了する。
このステップ134のゼロ点補正処理は、以下に述べるように実行される。まず、下流側NOxセンサ31の検出信号値を、制御周期ΔT毎にサンプリングし、所定個数(例えば100個)の検出信号値がサンプリングされた時点で、所定個数のサンプリング値を相加平均演算することによって、補正項を算出する。そして、この補正項の算出以降は、下流側NOxセンサ31の実際の検出信号値から補正項を減算した値に基づいて、下流側NOx濃度CNOx_Postが算出される。なお、ゼロ点補正済みの検出信号値が負の場合には、下流側NOx濃度CNOx_Postは値0に設定される。
また、下流側NOxセンサ31のゼロ点補正処理において、上記の補正項が算出された時点で、ゼロ点補正処理を実行済みであることを表すために、ゼロ点補正済みフラグF_ZEROが「1」に設定される。
このように、ステップ134でゼロ点補正済みフラグF_ZEROが「1」に設定されると、ステップ133の判別結果がYESとなり、その場合には、ステップ135に進み、判定値算出済みフラグF_CALが「1」であるか否かを判別する。
この判別結果がNOのときには、後述するNOx供給量判定値NOxREFを算出すべきであると判定して、ステップ136に進み、NOx捕捉量S_QNOxに応じて、図18に示すマップを検索することにより、NOx捕捉能NOxSを算出する。このNOx捕捉能NOxSは、下流側触媒12が捕捉可能なNOx量を表すものである。また、NOx捕捉量S_QNOxは、下流側触媒12に捕捉されたと推定されるNOx量であり、具体的には、以下に述べるように算出される。すなわち、図示しない算出処理において、要求トルクPMCMDおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、エンジン3の燃焼室から排気通路7に排出されるNOx排出量QNOxを算出するとともに、これを積算することによって、NOx捕捉量S_QNOxが算出される。
また、図18に示すように、NOx捕捉能NOxSは、NOx捕捉量S_QNOxが大きいほど、より小さい値に設定されている。これは、NOx捕捉量S_QNOxが下流側触媒12に捕捉されたと推定されるNOx量である関係上、NOx捕捉量S_QNOxが大きいほど、下流側触媒12が捕捉可能なNOx量がより小さくなるためである。
次いで、ステップ137に進み、触媒温TCATに応じて、図19に示すマップを検索することにより、触媒温補正係数CorTCAT2を算出する。同図において、TREFa〜TREFdは、TREFa<TREFb<TREFc<TREFdが成立するように設定される触媒温TCATの所定値である。このマップでは、触媒温補正係数CorTCAT2は、TREFa≦TREF<TREFbの範囲において、触媒温TCATが低いほど、より小さい値に設定されている。これは、触媒温TCATがTREFa≦TREF<TREFbの範囲にある場合、触媒温TCATが低いほど、下流側触媒12の活性度合がより低いことで、そのNOx捕捉能力がより低い状態になるので、それに対応するためである。
また、触媒温補正係数CorTCAT2は、TREFb≦TREF≦TREFcの範囲では一定値に設定されており、これは、下流側触媒12の活性度合がTREFb≦TREF≦TREFcの範囲において変化しないためである。さらに、触媒温補正係数CorTCAT2は、TREFc<TREF≦TREFdの範囲では、触媒温TCATが高いほど、より小さい値に設定されている。これは、触媒温TCATがTREFc<TREF≦TREFdの範囲にある場合、触媒温TCATが高いほど、下流側触媒12のNOx捕捉能力が低下するので、それに対応するためである。
ステップ137に続くステップ138で、排ガス流量QGASに応じて、図20に示すマップを検索することにより、排ガス流量補正係数CorQGAS2を算出する。このマップでは、排ガス流量補正係数CorQGAS2は、排ガス流量QGASが大きいほど、より小さい値に設定されている。これは、排ガス流量QGASが大きい場合、排ガスが下流側触媒12を通過する際に下流側触媒12と反応しにくくなり、下流側触媒12を通過した排ガスの活性度合が低くなることに起因して、下流側触媒12が実際よりも低いNOx捕捉能力を示す状態が発生したり、下流側触媒12自体の排ガスとの反応時間(接触時間)が短くなること、および排ガス中のNOxが下流側触媒12に捕捉されにくくなることに起因して、下流側触媒12に実際に捕捉されるNOx量が低下してしまう状態が発生したりするので、それに対応するためである。
次に、ステップ139に進み、下式(7)により、NOx供給量判定値NOxREFを算出する。
次いで、NOx供給量判定値NOxREFを算出済みであることを表すために、ステップ140に進み、判定値算出済みフラグF_CALを「1」に設定した後、本処理を終了する。
上記のように、ステップ140で判定値算出済みフラグF_CALが「1」に設定されると、ステップ135の判別結果がYESとなり、その場合には、ステップ141に進み、高NOx条件フラグF_NOxUPが「1」であるか否かを判別する。この判別結果がNOのときには、高NOx濃度制御を実行すべきであると判定して、ステップ142に進み、高NOx条件フラグF_NOxUPを「1」に設定した後、本処理を終了する。
このように、ステップ142で高NOx条件フラグF_NOxUPが「1」に設定されると、ステップ141の判別結果がYESとなり、その場合には、ステップ143に進み、下式(8)により、NOx供給量sumPreNOxを算出する。
この式(8)において、sumPreNOxZは、NOx供給量の前回値を表している。また、式(8)の右辺の第2項は、中間NOx濃度と排ガス流量と制御周期の積CNOx_Pre・QGAS・ΔTであるので、前回の制御タイミングから今回の制御タイミングまでの間において、下流側触媒12に供給されたNOx量を表すものである。したがって、NOx供給量sumPreNOxは、そのような値CNOx_Pre・QGAS・ΔTを積算することによって算出されるので、高NOx濃度制御処理の開始タイミングから今回の制御タイミングまでの間において、下流側触媒12に供給されたと推定されるNOxの総量を表すものになる。
次いで、ステップ144に進み、下式(9)により、NOxスリップ量sumPostNOxを算出する。
この式(9)において、sumPostNOxZは、NOxスリップ量の前回値を表している。また、式(9)の右辺の第2項は、下流側NOx濃度と排ガス流量と制御周期の積CNOx_Post・QGAS・ΔTであるので、前回の制御タイミングから今回の制御タイミングまでの間において、下流側触媒12に捕捉されることなく、下流側触媒12を通過したNOx量を表すものである。したがって、NOxスリップ量sumPostNOxは、そのような値CNOx_Post・QGAS・ΔTを積算することによって算出されるので、高NOx濃度制御処理の開始タイミングから今回の制御タイミングまでの間において、下流側触媒12を通過したと推定されるNOxの総量を表すものになる。
次に、ステップ145で、sumPreNOx>NOxREFまたはsumPostNOx>NOxREF2が成立しているか否かを判別する。このNOxREF2は、NOxスリップ量sumPostNOxの所定の判定値(一定値)である。この判別結果がNOのときには、そのまま本処理を終了する。一方、ステップ145の判別結果がYESで、sumPreNOx>NOxREFが成立しているか、またはsumPostNOx>NOxREF2が成立しているときには、下流側触媒12の劣化判定を行うのに十分な量のNOxが下流側触媒12に供給されたか、または下流側触媒12を通り抜けたNOx量が多い状態にあることで、下流側触媒12の劣化判定を行うべきであると判定して、ステップ146に進み、触媒劣化フラグF_CATNGの設定処理を実行する。
この触媒劣化フラグF_CATNGの設定処理は、具体的には図21に示すように実行される。この処理では、まず、ステップ160で、補正係数CorNOxを算出する。この補正係数CorNOxは、具体的には、上流側酸素貯蔵能PreOSCに応じて、図22に示すマップを検索することにより算出される。ここで、上流側酸素貯蔵能PreOSCは、上流側触媒11の酸素貯蔵能を表すものであり、図示しないが、上流側LAFセンサ22および中間LAFセンサ23の検出信号に基づき、前述した第1実施形態における触媒酸素貯蔵能OSCの算出手法(ステップ12〜18,60)と同様の手法によって算出される。すなわち、リッチスパイク制御処理の実行中、上流側LAFセンサ22の検出信号に基づき、第1当量比KACT1の積算値を算出し、この積算値を第1当量比KACT1の平均値で除算した値から、sumkact2/kact2を減算することによって、上流側酸素貯蔵能PreOSCが算出される。
また、図22において、PreOSC1は、上流側酸素貯蔵能PreOSCの所定値を表しており、このマップでは、補正係数CorNOxは、PreOSC<PreOSC1の範囲において、上流側酸素貯蔵能PreOSCが小さいほど、より小さい値に設定されている。これは、PreOSC<PreOSC1の範囲では、上流側酸素貯蔵能PreOSCが小さいほど、上流側触媒11がより劣化した状態にあることで、上流側触媒11を通過した排ガスの活性度合がより低くなり、NOxスリップ量sumPostNOxが実際よりも大きな値に算出されることになるので、それに対応するためである。また、補正係数CorNOxは、PreOSC≧PreOSC1の範囲では、一定に設定されている。これは、PreOSC≧PreOSC1の範囲では、上流側触媒11が劣化していないことで、上流側触媒11を通過した排ガスの活性度合が変化しないためである。
ステップ160に続くステップ161で、下式(10)により、補正後NOxスリップ量sumPostNOxFを算出する。
次いで、ステップ162に進み、補正後NOxスリップ量sumPostNOxFが所定の判定値NOxJUDよりも大きいか否かを判別する。この判定値NOxJUDは、一定値に設定されている。この判別結果がNOで、sumPostNOxF≦NOxJUDのときには、下流側触媒12が劣化していないと判定して、ステップ163に進み、それを表すために、触媒劣化フラグF_CATNGを「0」に設定する。
一方、ステップ162の判別結果がYESで、sumPostNOxF>NOxJUDのときには、下流側触媒12が劣化したと判定して、ステップ164に進み、それを表すために、触媒劣化フラグF_CATNGを「1」に設定する。
以上のステップ163または164に続くステップ165で、高NOx濃度制御処理を終了すべきであることを表すために、高NOx条件フラグF_NOxUPを「0」に設定する。
次に、ステップ166に進み、NOx供給量sumPreNOxと、NOxスリップ量sumPostNOxをいずれも値0に設定した後、本処理を終了する。
図17に戻り、ステップ146で、触媒劣化フラグF_CATNGの設定処理を以上のように実行した後、劣化判定処理を終了する。
なお、前述したステップ145において、NOxスリップ量sumPostNOxを、判定値NOxREF2に代えて、前述したステップ162で用いた判定値NOxJUDと比較するように構成してもよい。
次に、図23を参照しながら、高NOx濃度制御処理および劣化判定処理を以上のように実行した場合の、各フラグおよび各算出値の経時変化の一例について説明する。なお、同図中の下流側NOx濃度CNOx_Postと、NOxスリップ量sumPostNOxとにおいて、実線で示す曲線は、下流側触媒12が劣化している場合のものであり、破線で示す曲線は、下流側触媒12が劣化していない場合のものである。
同図に示すように、時刻t1で、下流側触媒12の劣化判定条件が成立し、F_JUD2=1が成立すると、その後のNOx供給量判定値NOxREFが算出された時点(時刻t2)で、F_NOxUP=1が成立し、高NOx濃度制御処理が開始されるとともに、この高NOx濃度制御処理の開始時点から任意の時間が経過したタイミング(時刻t3)で、高NOx濃度の排ガスが中間NOxセンサ30に到達し、NOx供給量sumPreNOxが上昇し始める。このNOx供給量sumPreNOxの上昇開始以降において、下流側触媒12が劣化しているときには、下流側NOx濃度CNOx_Postも時間の経過に伴って上昇するとともに、補正後NOxスリップ量sumPostNOxFも時間の経過に伴って上昇する。そして、sumPreNOx>NOxREFが成立した時点(時刻t4)で、sumPostNOxF>NOxJUDが成立する。それにより、下流側触媒12が劣化したと判定される。
一方、下流側触媒12が劣化していないときには、下流側NOx濃度CNOx_PostおよびNOxスリップ量sumPostNOxがほとんど変化しない。それにより、sumPreNOx>NOxREFが成立した時点(時刻t4)でも、sumPostNOxF≦NOxJUDが成立する。それにより、下流側触媒12が劣化していないと判定される。
以上のように、第2実施形態の劣化判定装置1Aによれば、ステップ130の判別結果がYESで、上流側触媒11が適切な活性状態にあるときには、下流側触媒12の劣化判定が実行される一方、ステップ130の判別結果がNOで、上流側触媒11が適切な活性状態にないときには、下流側触媒12の劣化判定が禁止される。それにより、上流側触媒11が活性状態にないことに起因する誤判定を回避しながら、下流側触媒12の劣化判定を実行することができ、判定精度を向上させることができる。
また、触媒活性フラグF_ACTは、第1実施形態の劣化判定装置1と同様に、触媒温TCATが第1所定値TREF1を下限とし第2所定値TREF2を上限とする範囲(TREF1≦TCAT≦TREF2)内にあるか否かに基づいて設定されるので、上流側触媒11が活性状態にないことに起因する誤判定を回避することができるとともに、上流側触媒11の活性度合が高すぎることに起因する誤判定も回避することができる。その結果、下流側触媒12の劣化判定精度をさらに向上させることができる。
さらに、下流側触媒12の劣化判定処理を実行する際、空燃比制御処理において、高NOx濃度制御処理が実行され、下流側触媒12に供給される排ガス中のNOx濃度が、空燃比のリーン制御処理が実行される通常運転時よりも高くなるように制御される。それにより、通常運転時と比較して、NOxスリップ量sumPostNOxの上昇タイミングを早めることができるとともに、その上昇速度も高めることができる。その結果、下流側触媒12の劣化判定を迅速に行うことができるとともに、その判定精度をより一層向上させることができる。
なお、第2実施形態は、中間濃度パラメータ検出手段として、中間NOxセンサ30を用いた例であるが、本発明の中間濃度パラメータ検出手段はこれに限らず、上流側触媒と下流側触媒の間における排ガス中の所定成分の濃度を表す中間濃度パラメータを検出または算出できるものであればよい。例えば、中間NOxセンサ30を省略し、エンジン回転数NEおよび要求トルクPMCMDに応じて、中間NOx濃度CNOx_Preを推定し、この推定値を用いて、中間濃度パラメータとしてのNOx供給量sumPreNOxを算出してもよい。
また、第2実施形態は、下流側濃度パラメータ検出手段として、下流側NOxセンサ31を用いた例であるが、本発明の下流側濃度パラメータ検出手段はこれに限らず、下流側触媒の下流側における排ガス中の所定成分の濃度を表す下流側濃度パラメータを検出または算出できるものであればよい。例えば、NOxセンサ以外のセンサの検出信号に基づいて、下流側濃度パラメータとしての下流側NOx濃度CNOx_Postを算出してもよい。
さらに、第2実施形態の劣化判定装置1Aにおいて、中間LAFセンサ23を省略し、中間NOxセンサ30として酸素濃度を検出する能力を有するものを用いることにより、リッチスパイク制御中、上流側LAFセンサ22および中間NOxセンサ30の検出信号値に基づいて、上流側酸素貯蔵能PreOSCを算出するように構成してもよい。このようにした場合、センサを1個省略できることで、その分、製造コストを削減することができる。
また、第2実施形態は、ステップ134のゼロ点補正処理において、下流側NOxセンサ31のゼロ点補正のみを実行した例であるが、上流側触媒11が下流側触媒12と同じNOx浄化触媒タイプのものである場合には、ステップ134のゼロ点補正処理において、中間NOxセンサ30および下流側NOxセンサ31の双方のゼロ点補正を実行してもよい。
一方、第2実施形態は、高NOx濃度制御処理を図16に示すように実行した例であるが、高NOx濃度制御処理はこれに限らず、下流側触媒12に供給される排ガスのNOx濃度をリーン制御時よりも高い値になるように制御する処理であればよい。例えば、高NOx濃度制御処理を図24に示すように実行してもよい。
同図に示すように、この高NOx濃度制御処理では、まず、ステップ170で、前述したステップ120と同じ手法により、高NOx濃度制御用の燃料噴射量QINJおよび燃料噴射タイミングφINJを算出する。
次いで、ステップ171で、高NOx濃度制御用の要求トルクPMCMDおよびエンジン回転数NEに応じて、図示しないマップを検索することにより、中間NOx濃度CNOx_Preの目標値CNOx_PreCMDを算出する。この目標値CNOx_PreCMDは、リーン制御中の中間NOx濃度CNOx_Preよりも高い値に設定されている。
次に、ステップ172に進み、中間NOx濃度CNOx_Preが上記目標値CNOx_PreCMDに収束するように、EGR制御弁8bをフィードバック制御した後、本処理を終了する。以上により、中間NOx濃度CNOx_Preがリーン制御中の値よりも高い値になるように制御され、それによって、下流側触媒12の劣化判定を迅速かつ精度よく実行することができる。
次に、本発明の第3実施形態に係る排ガス浄化装置の劣化判定装置について説明する。この劣化判定装置は、第2実施形態の劣化判定装置1Aと比較すると、第2実施形態の図17に示す劣化判定処理に代えて、図25に示す劣化判定処理をECU2によって実行する点のみが異なっているので、以下、図25に示す劣化判定処理についてのみ説明する。なお、本実施形態でも、ECU2が、中間濃度パラメータ検出手段、下流側濃度パラメータ検出手段、劣化判定手段、活性状態判定手段および禁止手段に相当する。
この劣化判定処理も、前述した図17の劣化判定処理と同様に、中間NOx濃度CNOx_Preと下流側NOx濃度CNOx_Postに基づいて、下流側触媒12の劣化判定を行うものであり、所定の制御周期ΔT(例えば10msec)で実行される。
この処理では、まず、ステップ180で、前述した触媒活性フラグF_ACTが「1」であるか否かを判別する。この触媒活性フラグF_ACTは、第1実施形態の劣化判定装置1と同様に、前述した図4の活性判定処理によって設定される。ステップ180の判別結果がNOで、上流側触媒11が活性状態になっていないときには、下流側触媒12の劣化判定を実行すべきでないと判定して、ステップ181に進み、後述する平均値算出済みフラグF_AVEと、前述した判定値算出済みフラグF_CALとをいずれも「0」に設定した後、本処理を終了する。
一方、ステップ180の判別結果がYESで、上流側触媒11が適切な活性状態にあるときには、ステップ182に進み、前述した判定条件成立フラグF_JUD2が「1」であるか否かを判別する。この判別結果がNOで、下流側触媒12の劣化判定条件が成立していないときには、下流側触媒12の劣化判定を実行すべきでないと判定して、前述したステップ181を実行した後、本処理を終了する。
一方、ステップ182の判別結果がYESで、下流側触媒12の劣化判定条件が成立しているときには、ステップ183に進み、平均値算出済みフラグF_AVEが「1」であるか否かを判別する。この判別結果がNOのときには、下流側NOx濃度CNOx_Postの平均値aveCNOxを算出すべきであると判定して、ステップ184に進み、平均値aveCNOxの算出処理を実行した後、本処理を終了する。
このステップ184では、平均値aveCNOxが以下に述べるように算出される。まず、制御周期ΔT毎に、下流側NOx濃度CNOx_Postを下流側NOxセンサ31の検出信号に基づいて算出し、この算出値をサンプリングする。そして、所定個数(例えば100個)の算出値がサンプリングされた時点で、所定個数のサンプリング値を相加平均演算することによって、平均値aveCNOxを算出する。そして、この平均値aveCNOxが算出された時点で、これを済みであることを表すために、平均値算出済みフラグF_AVEが「1」に設定される。
このように、ステップ184で平均値算出済みフラグF_AVEが「1」に設定されると、ステップ183の判別結果がYESとなり、その場合には、ステップ185に進み、判定値算出済みフラグF_CALが「1」であるか否かを判別する。
この判別結果がNOのときには、NOx供給量判定値NOxREFを算出すべきであると判定して、ステップ186〜190を、前述したステップ136〜140と同様に実行した後、本処理を終了する。
上記のようにステップ190を実行すると、ステップ185の判別結果がYESとなり、その場合には、ステップ191に進み、前述した高NOx条件フラグF_NOxUPが「1」であるか否かを判別する。この判別結果がNOのときには、高NOx濃度制御を実行すべきであると判定して、ステップ192に進み、それを表すために、高NOx条件フラグF_NOxUPを「1」に設定した後、本処理を終了する。
このように、ステップ192で高NOx条件フラグF_NOxUPが「1」に設定されると、ステップ191の判別結果がYESとなり、その場合には、ステップ193に進み、前述した式(8)により、NOx供給量sumPreNOxを算出する。
次いで、ステップ194に進み、前述した式(9)により、NOxスリップ量sumPostNOxを算出する。
次に、ステップ195で、下式(11)により、排ガス供給量sumQGASを算出する。
この式(11)において、sumQGASZは、排ガス供給量の前回値を表している。式(11)の右辺の第2項は、排ガス流量と制御周期の積QGAS・ΔTであるので、前回の制御タイミングから今回の制御タイミングまでの間において、下流側触媒12に供給されたと推定される排ガス量を表すものである。したがって、排ガス供給量sumQGASは、そのような値QGAS・ΔTを積算することによって算出されるので、高NOx濃度制御処理の開始タイミングから今回の制御タイミングまでの間において、下流側触媒12に供給されたと推定される排ガスの総量を表すものになる。
次いで、ステップ196に進み、前述したステップ145と同様に、sumPreNOx>NOxREFまたはsumPostNOx>NOxREF2が成立しているか否かを判別する。この判別結果がNOのときには、そのまま本処理を終了する。一方、ステップ196の判別結果がYESのときには、ステップ197に進み、触媒劣化フラグF_CATNGの設定処理を実行する。
この触媒劣化フラグF_CATNGの設定処理は、具体的には図26に示すように実行される。この処理では、まず、ステップ200で、下式(12)により、判定値NOxJUD2を算出する。
この式(12)において、C1は所定の定数を表している。この式(12)を参照すると明らかなように、判定値NOxJUD2は、定数C1に、排ガス供給量と平均値の積sumQGAS・aveCNOxを加算することによって算出されるので、高NOx濃度制御処理の開始タイミングから今回の制御タイミングまでの間において、下流側触媒12に供給されたと推定されるNOxの総量を表すように算出される。
ステップ200に続くステップ201で、NOxスリップ量sumPostNOxが判定値NOxJUD2よりも大きいか否かを判別する。この判別結果がNOで、sumPostNOx≦NOxJUD2のときには、下流側触媒12が劣化していないと判定して、ステップ202に進み、それを表すために、触媒劣化フラグF_CATNGを「0」に設定する。
一方、ステップ201の判別結果がYESで、sumPostNOx>NOxJUD2のときには、下流側触媒12が劣化したと判定して、ステップ203に進み、それを表すために、触媒劣化フラグF_CATNGを「1」に設定する。
以上のステップ202または203に続くステップ204で、高NOx濃度制御処理を終了すべきであることを表すために、高NOx条件フラグF_NOxUPを「0」に設定する。
次に、ステップ205に進み、NOx供給量sumPreNOxと、NOxスリップ量sumPostNOxと、排ガス供給量sumQGASとをいずれも値0に設定した後、本処理を終了する。
図25に戻り、ステップ197で、触媒劣化フラグF_CATNGの設定処理を以上のように実行した後、劣化判定処理を終了する。
なお、前述したステップ196において、NOxスリップ量sumPostNOxを、判定値NOxREF2に代えて、前述したステップ200で算出した判定値NOxJUD2と比較するように構成してもよい。
以上のように、第3実施形態の劣化判定装置によれば、ステップ180の判別結果がYESで、上流側触媒11が適切な活性状態にあるときには、下流側触媒12の劣化判定が実行される一方、ステップ180の判別結果がNOで、上流側触媒11が適切な活性状態にないときには、下流側触媒12の劣化判定が禁止される。それにより、上流側触媒11が活性状態にないことに起因する誤判定を回避しながら、下流側触媒12の劣化判定を実行することができ、判定精度を向上させることができる。
また、触媒活性フラグF_ACTは、第1実施形態の劣化判定装置1と同様に、触媒温TCATが第1所定値TREF1を下限とし第2所定値TREF2を上限とする範囲(TREF1≦TCAT≦TREF2)内にあるか否かに基づいて設定されるので、上流側触媒11が活性状態にないことに起因する誤判定を回避することができるとともに、上流側触媒11の活性度合が高すぎることに起因する誤判定も回避することができる。それにより、判定精度をさらに向上させることができる。さらに、第2実施形態の劣化判定装置1Aと同様に、下流側触媒12の劣化判定処理を実行する際、空燃比制御処理において、高NOx濃度制御処理が実行されるので、下流側触媒12の劣化判定を迅速に行うことができるとともに、その判定精度をより一層、向上させることができる。
なお、第1実施形態は、排ガス中の所定成分として酸素を用い、第2および第3実施形態は、排ガス中の所定成分としてNOxを用いた例であるが、本発明の所定成分はこれに限らず、排ガス中の所定成分であればよい。例えば、所定成分として、HCやCOなどを用いてもよい。