JP2010024859A - 可変圧縮比内燃機関及び、可変圧縮比機構の異常判定方法 - Google Patents
可変圧縮比内燃機関及び、可変圧縮比機構の異常判定方法 Download PDFInfo
- Publication number
- JP2010024859A JP2010024859A JP2008184049A JP2008184049A JP2010024859A JP 2010024859 A JP2010024859 A JP 2010024859A JP 2008184049 A JP2008184049 A JP 2008184049A JP 2008184049 A JP2008184049 A JP 2008184049A JP 2010024859 A JP2010024859 A JP 2010024859A
- Authority
- JP
- Japan
- Prior art keywords
- compression ratio
- air
- exhaust
- ratio
- abnormality determination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Output Control And Ontrol Of Special Type Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
【解決手段】可変圧縮比内燃機関の排気系に触媒コンバータを備え、触媒コンバータの上流側にA/Fセンサを、下流側にO2センサを備える。可変圧縮比機構の異常判定時には、内燃機関の圧縮比を異常判定圧縮比に設定し、さらに排気の空燃比をリーンからリッチに反転させる(S104)。その際の、A/Fセンサの出力変化時期と、O2センサの出力変化時期との時間差を取得して、その値から実際の圧縮比の値を導出する(S105)。この実際の圧縮比の値と異常判定圧縮比の差の大きさに基づいて、可変圧縮比機構の異常判定を行なう(S106〜S108)。
【選択図】図5
Description
が、可変圧縮比機構によって設定された圧縮比に対して妥当な温度か否かより、可変圧縮比機構の異常判定を行なうことを最大の特徴とする。
前記可変圧縮比機構によって圧縮比を目標圧縮比に設定する圧縮比制御手段と、
前記内燃機関からの排気の温度を取得する温度取得手段と、
前記圧縮比制御手段により設定された目標圧縮比または該目標圧縮比に関する指標値と、圧縮比が該目標圧縮比に設定された状態において前記温度取得手段により取得された排気の温度とによって、前記可変圧縮比機構の異常判定を行う異常判定手段と、
を備えることを特徴とする。
前記内燃機関からの排気が流通する排気通路に設けられ、該排気通路を通過する排気を浄化する排気浄化触媒と、
前記排気通路の前記排気浄化触媒の上流側における前記排気の空燃比である上流側空燃比を検出する上流側空燃比センサと、
前記排気通路の前記排気浄化触媒の下流側における前記排気の空燃比である下流側空燃比を検出する下流側空燃比センサと、をさらに備え、
前記温度取得手段は、
前記空燃比切換手段が前記排気の空燃比を変化させた際の、前記上流側空燃比の変化時期と、前記下流側空燃比の変化時期との差によって前記排気の温度を取得するようにしてもよい。
浄化触媒を備え、さらに、排気浄化触媒の上流側の空燃比(上流側空燃比)を検出する上流側空燃比センサと、排気浄化触媒の下流側の空燃比(下流側空燃比)を検出する下流側空燃比センサとを備えるようにした。また、例えば内燃機関の燃料噴射量を増加させ、あるいは副噴射を行なうことにより排気の空燃比を制御する空燃比切換手段を備えるようにした。
、排気浄化触媒中におけるO2の移動速度が遅くなる。そうすると、例えば空燃比がリーンからリッチに変化(反転)した直後は、HC、COなどの燃料の未燃成分は、排気浄化触媒を通過する際にO2と反応しづらく、排気浄化触媒中で酸化されずにそのまま排出され易くなる。その結果、下流側空燃比センサによって検出される下流側空燃比は比較的早期に、且つ急峻に変化する。
前記可変圧縮比機構によって圧縮比を目標圧縮比に設定する圧縮比制御手段と、
前記内燃機関からの排気の空燃比を変化させる空燃比切換手段と、
前記内燃機関からの排気が流通する排気通路に設けられ、該排気を浄化する排気浄化触媒と、
を備えた可変圧縮比内燃機関における、可変圧縮比機構の異常判定方法であって、
前記空燃比切換手段が前記排気の空燃比を変化させた際の、前記排気浄化触媒の上流側の空燃比の変化の時期と、前記排気浄化触媒の下流側の空燃比の変化の時期との時間差と、前記目標圧縮比とから、前記可変圧縮比機構の異常判定を行うことを特徴とする可変圧縮比機構の異常判定方法であってもよい。
前記空燃比切換手段が前記排気の空燃比を変化させる空燃比切換工程と、
前記空燃比を変化させた際の前記排気浄化触媒の上流側の空燃比の変化時期と、前記排気浄化触媒の下流側の空燃比の変化時期との時間差を検出する時間差検出工程と、
前記時間差検出工程で検出された時間差から実際の圧縮比を導出する実圧縮比導出工程と、
前記圧縮比設定工程で設定された目標圧縮比と前記実圧縮比導出工程で導出された実際の圧縮比とを比較し、両者の差が所定値より大きい場合に、前記可変圧縮比機構が異常と判定する異常判定工程と、
を有するようにしてもよい。
前記空燃比切換手段が前記排気の空燃比を変化させる空燃比切換工程と、
前記空燃比を変化させた際の前記排気浄化触媒の上流側の空燃比の変化時期と、前記排気浄化触媒の下流側の空燃比の変化時期との時間差を検出する時間差検出工程と、
前記時間差検出工程で検出された時間差から実際の圧縮比を導出する実圧縮比導出工程と、
前記圧縮比設定工程で設定された目標圧縮比と、前記実圧縮比導出工程で導出された実際の圧縮比とから前記可変圧縮比機構の異常を判定する異常判定工程と、を有し、
前記目標圧縮比を所定の第1目標圧縮比とした場合の実際の圧縮比である第1実圧縮比
と、前記目標圧縮比を所定の第2目標圧縮比とした場合の実際の圧縮比である第2実圧縮比と、が導出され、
前記異常判定工程では、前記第1目標圧縮比と前記第2目標圧縮比の差分と、前記第1実圧縮比と前記第2実圧縮比の差分との差が所定値より大きい場合に、前記可変圧縮比機構が異常と判定するようにしてもよい。
る三元触媒を備えた触媒コンバータ25が配置されている。また、排気管21における触媒コンバータ25の上流側には、触媒コンバータ25の上流側を通過する排気の空燃比を検出するA/Fセンサ27が上流側空燃比センサとして配置されている。また、排気管21における触媒コンバータ25の下流側には、触媒コンバータ25の下流側を通過する排気の酸素濃度を検出するO2センサ29が下流側空燃比センサとして配置されている。さらに、シリンダ2の頂部には、点火プラグ16が設けられている。そして、内燃機関1のクランクシャフト13にコンロッド14を介して連結されたピストン15が、シリンダ2内で往復運動を行う。
室容積が増えて機械圧縮比が低下する。
を設ける必要があり、コストや耐久性の点で最適な方法とは言えなかった。
は、可変圧縮比機構9が異常であると判定することが可能である。
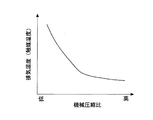
る排気の温度の値が読み出されることによって導出する。また、続いて、図4に示した、排気の温度と圧縮比との関係を示したグラフの内容をマップ化した温度-圧縮比マップか
ら、得られた排気温度に対応した圧縮比の値を読み出すことによって、最終的に実際の圧縮比の値が求められる。ここで、A/Fセンサ27の出力変化と、O2センサ29の出力変化との間の時間差を取得し、この時間差より排気の温度を導出するECU90は、温度取得手段を構成する。また、S105の処理は、時間差検出工程と実圧縮比導出工程に相当する。S105の処理が終了するとS106に進む。
温度と圧縮比との関係を示したグラフの内容をマップ化した温度-圧縮比マップから、実
際の第1圧縮比の値が求められる。この実際の第1圧縮比は本実施例において第1実圧縮比に相当する。S202の処理が終了するとS203に進む。
の温度と圧縮比との関係を示したグラフの内容をマップ化した温度-圧縮比マップから、
実際の第2圧縮比の値が求められる。ここで実際の第2圧縮比は本実施例において第2実圧縮比に相当する。S204の処理が終了するとS205に進む。
揺動中心を中心に揺動可能な揺動部材を連結し、前記揺動中心がカム軸を回転させることによって移動することで燃焼室の容積及びピストンのストロークを変更し、以って内燃機関の圧縮比を変更する機構や他の可変圧縮比機構に対して本発明を適用することも可能である。
など他の種類の触媒に対して適用が可能である。さらに、上流側空燃比センサと下流側空燃比センサの組合せとしては、上流側にA/Fセンサ、下流側にO2を配置する組合せ以外の組合せでもよい。例えば、上流側と下流側両方にA/Fセンサを備えるようにしてもよい。
た。そして、排気の温度より、図4に示した、排気の温度と圧縮比との関係を示したグラフの内容をマップ化した温度-圧縮比マップを用いて、最終的に実際の圧縮比の値を導出
した。しかしながら、例えば、上記の時間差-温度マップと、温度−圧縮比マップを組合
せたマップを用いて、A/Fセンサ27の出力変化と、O2センサ29の出力変化との間の時間差から、実際の圧縮比の値を直接に導出しても構わない。
気の温度と圧縮比との関係を示したグラフの内容をマップ化した温度-圧縮比マップとを
用いて変換し、許容される出力変化時期の差を求めたものである。この許容時間差を求める際に用いられた、異常判定圧縮比に対応する出力変化の時間差は、本実施例において目標圧縮比に関する指標値である。
度と圧縮比との関係を示したグラフの内容をマップ化した温度-圧縮比マップとを用いて
変換し、許容される出力変化の時間差の差分を求めたものである。この許容差分を求める際に用いられた、第1異常判定圧縮比及び第2異常判定圧縮比に対応する出力変化の時間差は、本実施例において目標圧縮比に関する指標値である。
2・・・・シリンダ
3・・・・シリンダブロック
4・・・・クランクケース
5・・・・吸気弁
6・・・・排気弁
7・・・・吸気側カム
8・・・・排気側カム
9・・・・可変圧縮比機構
13・・・・クランク軸
15・・・・ピストン
16・・・・点火バルブ
17・・・・燃料噴射弁
18・・・・吸気ポート
19・・・・吸気管
20・・・・排気ポート
21・・・・排気管
22・・・・スロットル弁
25・・・・触媒コンバータ
27・・・・A/Fセンサ
29・・・・O2センサ
90・・・・ECU
91・・・・クランクポジションセンサ
92・・・・アクセルポジションセンサ
Claims (9)
- 内燃機関の圧縮比を変更可能な可変圧縮比機構と、
前記可変圧縮比機構によって圧縮比を目標圧縮比に設定する圧縮比制御手段と、
前記内燃機関からの排気の温度を取得する温度取得手段と、
前記圧縮比制御手段により設定された目標圧縮比または該目標圧縮比に関する指標値と、圧縮比が該目標圧縮比に設定された状態において前記温度取得手段により取得された排気の温度とによって、前記可変圧縮比機構の異常判定を行う異常判定手段と、
を備えることを特徴とする可変圧縮比内燃機関。 - 前記内燃機関からの排気の空燃比を変化させる空燃比切換手段と、
前記内燃機関からの排気が流通する排気通路に設けられ、該排気通路を通過する排気を浄化する排気浄化触媒と、
前記排気通路の前記排気浄化触媒の上流側における前記排気の空燃比である上流側空燃比を検出する上流側空燃比センサと、
前記排気通路の前記排気浄化触媒の下流側における前記排気の空燃比である下流側空燃比を検出する下流側空燃比センサと、をさらに備え、
前記温度取得手段は、
前記空燃比切換手段が前記排気の空燃比を変化させた際の、前記上流側空燃比の変化時期と、前記下流側空燃比の変化時期との差によって前記排気の温度を取得することを特徴とする請求項1に記載の可変圧縮比内燃機関。 - 前記異常判定手段は、圧縮比が前記目標圧縮比に設定された状態で前記温度取得手段により取得された排気の温度から実際の圧縮比を導出し、前記目標圧縮比と実際の圧縮比との差が所定値より大きい場合に、前記可変圧縮比機構が異常と判定することを特徴とする請求項1または2に記載の可変圧縮比内燃機関。
- 前記異常判定手段は、圧縮比が所定の第1目標圧縮比に設定された状態で前記温度取得手段により取得された排気の温度から実際の圧縮比である第1実圧縮比を導出し、圧縮比が所定の第2目標圧縮比に設定された状態で前記温度取得手段により取得された排気の温度から実際の圧縮比である第2実圧縮比を導出し、前記第1目標圧縮比と前記第2目標圧縮比の差分と、前記第1実圧縮比と前記第2実圧縮比の差分との差が所定値より大きい場合に、前記可変圧縮比機構が異常と判定することを特徴とする請求項1または2に記載の可変圧縮比内燃機関。
- 前記異常判定手段が前記可変圧縮比機構の異常判定を行う前に、前記排気浄化触媒の動作確認を行うことを特徴とする請求項2に記載の可変圧縮比内燃機関。
- 前記異常判定手段が前記可変圧縮比機構の異常判定を行う前に、前記上流側空燃比センサおよび/または前記下流側空燃比センサの動作確認を行うことを特徴とする請求項2に記載の可変圧縮比内燃機関。
- 内燃機関の圧縮比を変更可能な可変圧縮比機構と、
前記可変圧縮比機構によって圧縮比を目標圧縮比に設定する圧縮比制御手段と、
前記内燃機関からの排気の空燃比を変化させる空燃比切換手段と、
前記内燃機関からの排気が流通する排気通路に設けられ、該排気を浄化する排気浄化触媒と、
を備えた可変圧縮比内燃機関における、可変圧縮比機構の異常判定方法であって、
前記空燃比切換手段が前記排気の空燃比を変化させた際の、前記排気浄化触媒の上流側の空燃比の変化の時期と、前記排気浄化触媒の下流側の空燃比の変化の時期との時間差と
、前記目標圧縮比とから、前記可変圧縮比機構の異常判定を行うことを特徴とする可変圧縮比機構の異常判定方法。 - 前記可変圧縮比機構によって圧縮比を目標圧縮比に設定する圧縮比設定工程と、
前記空燃比切換手段が前記排気の空燃比を変化させる空燃比切換工程と、
前記空燃比を変化させた際の前記排気浄化触媒の上流側の空燃比の変化時期と、前記排気浄化触媒の下流側の空燃比の変化時期との時間差を検出する時間差検出工程と、
前記時間差検出工程で検出された時間差から実際の圧縮比を導出する実圧縮比導出工程と、
前記圧縮比設定工程で設定された目標圧縮比と前記実圧縮比導出工程で導出された実際の圧縮比とを比較し、両者の差が所定値より大きい場合に、前記可変圧縮比機構が異常と判定する異常判定工程と、
を有することを特徴とする請求項7に記載の可変圧縮比機構の異常判定方法。 - 前記可変圧縮比機構によって圧縮比を所定の目標圧縮比に設定する圧縮比設定工程と、
前記空燃比切換手段が前記排気の空燃比を変化させる空燃比切換工程と、
前記空燃比を変化させた際の前記排気浄化触媒の上流側の空燃比の変化時期と、前記排気浄化触媒の下流側の空燃比の変化時期との時間差を検出する時間差検出工程と、
前記時間差検出工程で検出された時間差から実際の圧縮比を導出する実圧縮比導出工程と、
前記圧縮比設定工程で設定された目標圧縮比と、前記実圧縮比導出工程で導出された実際の圧縮比とから前記可変圧縮比機構の異常を判定する異常判定工程と、を有し、
前記目標圧縮比を所定の第1目標圧縮比とした場合の実際の圧縮比である第1実圧縮比と、前記目標圧縮比を所定の第2目標圧縮比とした場合の実際の圧縮比である第2実圧縮比と、が導出され、
前記異常判定工程では、前記第1目標圧縮比と前記第2目標圧縮比の差分と、前記第1実圧縮比と前記第2実圧縮比の差分との差が所定値より大きい場合に、前記可変圧縮比機構が異常と判定することを特徴とする請求項7に記載の可変圧縮比機構の異常判定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184049A JP5056636B2 (ja) | 2008-07-15 | 2008-07-15 | 可変圧縮比内燃機関及び、可変圧縮比機構の異常判定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184049A JP5056636B2 (ja) | 2008-07-15 | 2008-07-15 | 可変圧縮比内燃機関及び、可変圧縮比機構の異常判定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010024859A true JP2010024859A (ja) | 2010-02-04 |
| JP5056636B2 JP5056636B2 (ja) | 2012-10-24 |
Family
ID=41730934
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008184049A Expired - Fee Related JP5056636B2 (ja) | 2008-07-15 | 2008-07-15 | 可変圧縮比内燃機関及び、可変圧縮比機構の異常判定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5056636B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011096536A1 (ja) | 2010-02-05 | 2011-08-11 | 独立行政法人理化学研究所 | 新規合成糖脂質およびその用途 |
| WO2013179465A1 (ja) * | 2012-05-31 | 2013-12-05 | トヨタ自動車株式会社 | 可変圧縮比機構を備える内燃機関 |
| DE102014018855A1 (de) | 2014-12-17 | 2016-06-23 | Audi Ag | Verfahren zum Betreiben einer Brennkraftmaschine sowie entsprechende Brennkraftmaschine |
| WO2017009962A1 (ja) * | 2015-07-15 | 2017-01-19 | 日産自動車株式会社 | 内燃機関の制御装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015221809A1 (de) * | 2015-10-12 | 2017-04-13 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Diagnose einer variablen Verstellung eines Verdichtungsverhältnisses in einem Hubkolben-Verbrennungsmotor |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004308618A (ja) * | 2003-04-10 | 2004-11-04 | Toyota Motor Corp | 圧縮比変更機構を備えた内燃機関および内燃機関の制御方法 |
| JP2005180245A (ja) * | 2003-12-17 | 2005-07-07 | Yanmar Co Ltd | 空燃比制御システム |
| JP2005315161A (ja) * | 2004-04-28 | 2005-11-10 | Honda Motor Co Ltd | 内燃機関の制御装置 |
| JP2006161583A (ja) * | 2004-12-03 | 2006-06-22 | Nissan Motor Co Ltd | 内燃機関の制御装置 |
| JP2007224927A (ja) * | 2007-06-11 | 2007-09-06 | Toyota Motor Corp | 圧縮比変更機構の故障を検知して制御を行う内燃機関 |
| JP2008038602A (ja) * | 2006-08-01 | 2008-02-21 | Toyota Motor Corp | 内燃機関の排気浄化装置 |
-
2008
- 2008-07-15 JP JP2008184049A patent/JP5056636B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004308618A (ja) * | 2003-04-10 | 2004-11-04 | Toyota Motor Corp | 圧縮比変更機構を備えた内燃機関および内燃機関の制御方法 |
| JP2005180245A (ja) * | 2003-12-17 | 2005-07-07 | Yanmar Co Ltd | 空燃比制御システム |
| JP2005315161A (ja) * | 2004-04-28 | 2005-11-10 | Honda Motor Co Ltd | 内燃機関の制御装置 |
| JP2006161583A (ja) * | 2004-12-03 | 2006-06-22 | Nissan Motor Co Ltd | 内燃機関の制御装置 |
| JP2008038602A (ja) * | 2006-08-01 | 2008-02-21 | Toyota Motor Corp | 内燃機関の排気浄化装置 |
| JP2007224927A (ja) * | 2007-06-11 | 2007-09-06 | Toyota Motor Corp | 圧縮比変更機構の故障を検知して制御を行う内燃機関 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011096536A1 (ja) | 2010-02-05 | 2011-08-11 | 独立行政法人理化学研究所 | 新規合成糖脂質およびその用途 |
| WO2013179465A1 (ja) * | 2012-05-31 | 2013-12-05 | トヨタ自動車株式会社 | 可変圧縮比機構を備える内燃機関 |
| CN104350258A (zh) * | 2012-05-31 | 2015-02-11 | 丰田自动车株式会社 | 具备可变压缩比机构的内燃机 |
| JPWO2013179465A1 (ja) * | 2012-05-31 | 2016-01-14 | トヨタ自動車株式会社 | 可変圧縮比機構を備える内燃機関 |
| EP2857659A4 (en) * | 2012-05-31 | 2016-03-02 | Toyota Motor Co Ltd | COMBUSTION ENGINE WITH VARIABLE COMPACTION MECHANISM |
| US9528437B2 (en) | 2012-05-31 | 2016-12-27 | Toyota Jidosha Kabushiki Kaisha | Internal combustion engine comprising variable compression ratio mechanism |
| DE102014018855A1 (de) | 2014-12-17 | 2016-06-23 | Audi Ag | Verfahren zum Betreiben einer Brennkraftmaschine sowie entsprechende Brennkraftmaschine |
| DE102014018855B4 (de) * | 2014-12-17 | 2020-04-16 | Audi Ag | Verfahren zum Betreiben einer Brennkraftmaschine sowie entsprechende Brennkraftmaschine |
| WO2017009962A1 (ja) * | 2015-07-15 | 2017-01-19 | 日産自動車株式会社 | 内燃機関の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5056636B2 (ja) | 2012-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8656701B2 (en) | Control device | |
| US9027539B2 (en) | Control apparatus for internal combustion engine | |
| US6968679B2 (en) | Method for operating an internal combustion engine | |
| JP4242299B2 (ja) | 可変バルブ装置の異常診断装置 | |
| CN102239318B (zh) | 发动机系统控制装置 | |
| JP6405405B1 (ja) | Egr異常検出装置 | |
| MXPA06012498A (es) | Sistema de control para un motor de combustion interna. | |
| JP5765350B2 (ja) | 多気筒内燃機関の気筒間空燃比インバランス検出装置 | |
| JP2011196195A (ja) | 内燃機関の回転変動異常検出装置 | |
| JP5056636B2 (ja) | 可変圧縮比内燃機関及び、可変圧縮比機構の異常判定方法 | |
| JP2009293497A (ja) | 可変圧縮比内燃機関及び、可変圧縮比機構の異常判定方法 | |
| US9212583B2 (en) | Air-fuel ratio control device for internal combustion engine | |
| JP5086228B2 (ja) | 内燃機関の運転制御装置 | |
| JP5533471B2 (ja) | 触媒劣化診断装置 | |
| JP4815407B2 (ja) | 内燃機関の運転制御装置 | |
| JP5446759B2 (ja) | エンジンの異常検出方法及び異常検出装置 | |
| JP5999008B2 (ja) | 多気筒内燃機関の気筒間空燃比インバランス検出装置 | |
| JP2010163932A (ja) | 内燃機関の触媒劣化診断装置 | |
| JP2005351153A (ja) | 触媒劣化判定装置 | |
| JP2009209861A (ja) | 内燃機関の排気系診断装置 | |
| JP2010043624A (ja) | 内燃機関の触媒劣化判定装置 | |
| JP2009264150A (ja) | 制御装置 | |
| US8833150B2 (en) | Apparatus and method for detecting abnormality of imbalance of air-fuel ratios among cylinders | |
| JP4779814B2 (ja) | 内燃機関の触媒代表温度取得装置 | |
| JP6339402B2 (ja) | 空燃比インバランス診断装置及び空燃比インバランス診断方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100923 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120413 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120703 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120716 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150810 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5056636 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150810 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |