JP2010023698A - 動力装置 - Google Patents
動力装置 Download PDFInfo
- Publication number
- JP2010023698A JP2010023698A JP2008188281A JP2008188281A JP2010023698A JP 2010023698 A JP2010023698 A JP 2010023698A JP 2008188281 A JP2008188281 A JP 2008188281A JP 2008188281 A JP2008188281 A JP 2008188281A JP 2010023698 A JP2010023698 A JP 2010023698A
- Authority
- JP
- Japan
- Prior art keywords
- rotating machine
- rotor
- power
- transmission
- rotating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/52—Driving a plurality of drive axles, e.g. four-wheel drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/448—Electrical distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/02—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving vehicles; peculiar to engines driving variable pitch propellers
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K16/00—Machines with more than one rotor or stator
- H02K16/02—Machines with one stator and two or more rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K51/00—Dynamo-electric gears, i.e. dynamo-electric means for transmitting mechanical power from a driving shaft to a driven shaft and comprising structurally interrelated motor and generator parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/26—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators
- B60K2006/262—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators the motor or generator are used as clutch, e.g. between engine and driveshaft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/50—Structural details of electrical machines
- B60L2220/52—Clutch motors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- General Engineering & Computer Science (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
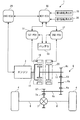
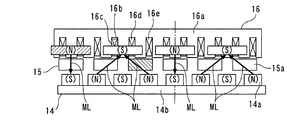
【解決手段】動力装置1は、エンジン3と、第1および第2回転機10,20を備え、これらの動力によって前輪4を駆動する。第1回転機10は、第1および第2ロータ14,15とステータ16を備え、ステータ16に発生する電機子磁極の数と、第1ロータ14の磁極の数と、第2ロータ15の軟磁性体コア15aの数との比が、1:m:(1+m)/2(ただしm≠1)となるように設定されている。
【選択図】図2
Description
(f1)電機子がU相、V相およびW相の3相コイルを有すること。
(f2)電機子磁極が2個すなわち電機子磁極の極対数が値1であり、磁極が4個すなわち磁極の極対数が値2であるとともに、軟磁性体が第1〜第3軟磁性体の計3個であること。
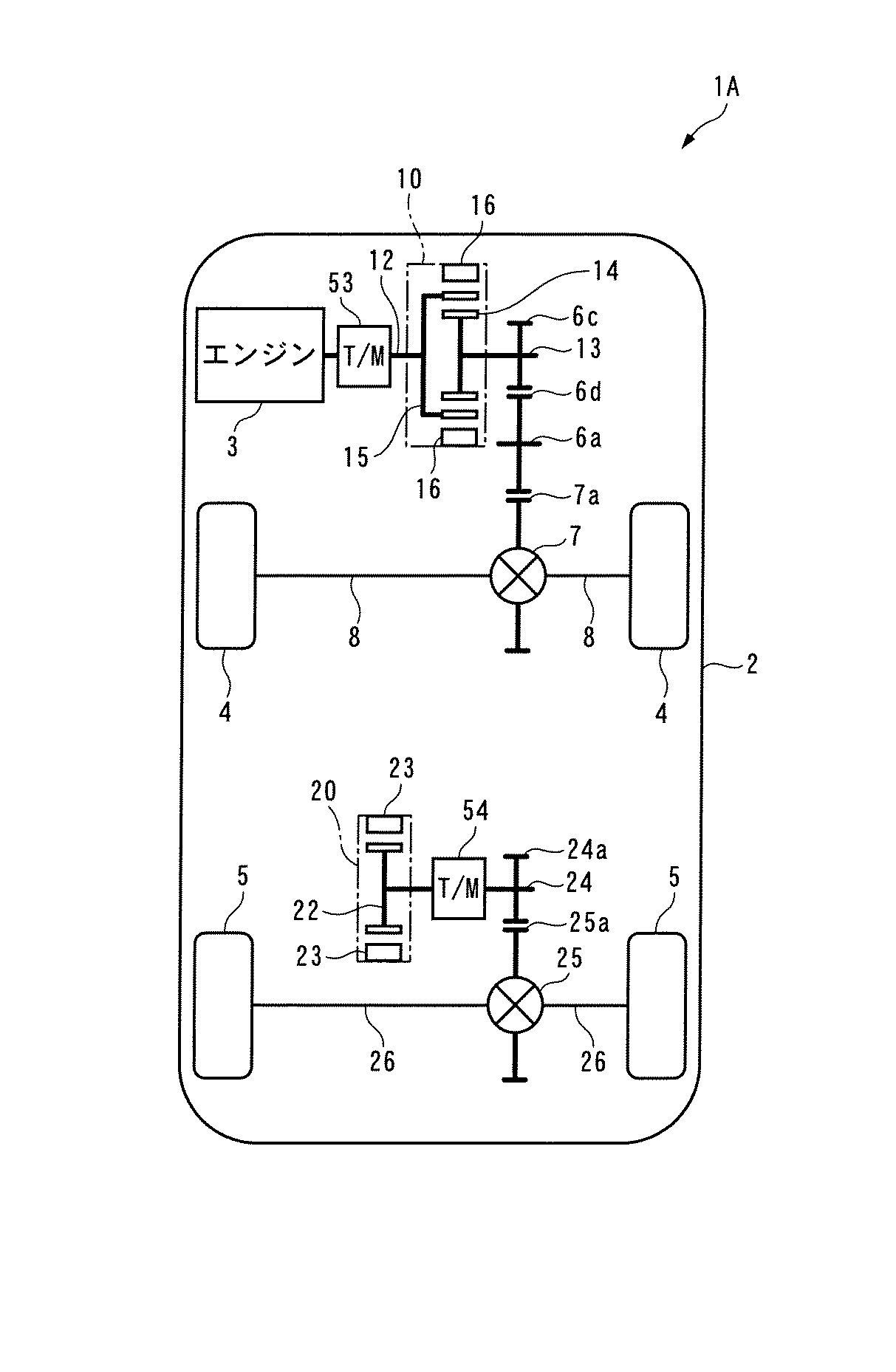
1A〜1D 動力装置
3 エンジン(熱機関)
4 前輪(被駆動部)
5 後輪(第2被駆動部)
10 第1回転機
12 入力軸(回転軸)
13 出力軸(回転軸)
14 第1ロータ
14a 永久磁石(磁極)
15 第2ロータ
15a 軟磁性体コア(軟磁性体)
16 ステータ
16a 鉄芯(電機子、電機子列)
16c U相コイル(電機子、電機子列)
16d V相コイル(電機子、電機子列)
16e W相コイル(電機子、電機子列)
20 第2回転機(制止装置)
50〜54 変速装置
55 電磁ブレーキ(制止装置)
56 クラッチ
57,58 変速装置
Claims (17)
- 動力によって被駆動部を駆動する動力装置であって、
熱機関と、
ステータと、当該ステータに対して相対的に回転自在の第1ロータおよび第2ロータとを有し、当該第1ロータおよび当該第2ロータの一方が前記熱機関に機械的に連結されるとともに、当該第1ロータおよび当該第2ロータの他方が前記被駆動部に機械的に連結された第1回転機と、
を備え、
前記ステータは、円周方向に並んだ複数の電機子で構成され、電力の供給に伴って当該複数の電機子に発生する電機子磁極により、前記円周方向に回転する回転磁界を発生させる電機子列を有し、
前記第1ロータは、前記電機子列に対向するように配置された磁極列を有し、当該磁極列は、互いに間隔を存して前記円周方向に並ぶとともに隣り合う各2つが互いに異なる極性を有する複数の磁極で構成され、
前記第2ロータは、前記電機子列と前記磁極列の間に配置された軟磁性体列を有し、当該軟磁性体列は、互いに間隔を存して前記円周方向に並んだ複数の軟磁性体で構成され、
前記電機子磁極の数と前記磁極の数と前記軟磁性体の数との比が、1:m:(1+m)/2(ただしm≠1)となるように設定されていることを特徴とする動力装置。 - 前記第1回転機の前記第1ロータは前記被駆動部に機械的に連結され、前記第2ロータは前記熱機関に機械的に連結されていることを特徴とする請求項1に記載の動力装置。
- 前記第2ロータの回転を制止するための制止装置をさらに備えることを特徴とする請求項2に記載の動力装置。
- 前記被駆動部および前記第1ロータに機械的に連結された回転軸を有する第2回転機をさらに備えることを特徴とする請求項2に記載の動力装置。
- 前記第1回転機の前記第1ロータおよび前記第2回転機の前記回転軸と、前記被駆動部との間の変速動作を行う変速装置をさらに備えることを特徴とする請求項4に記載の動力装置。
- 前記第1回転機の前記第2ロータと前記熱機関との間の変速動作を行う変速装置をさらに備えることを特徴とする請求項4に記載の動力装置。
- 前記第2回転機の前記回転軸は、変速装置を介して前記第1回転機の前記第1ロータおよび前記被駆動部に機械的に連結されており、
当該変速装置は、前記第2回転機の前記回転軸と、前記第1回転機の前記第1ロータおよび前記被駆動部との間の変速動作を行うことを特徴とする請求項4に記載の動力装置。 - 前記被駆動部とは別個の第2被駆動部と、
当該第2被駆動部に機械的に連結された第2回転機と、をさらに備えることを特徴とする請求項2に記載の動力装置。 - 前記第1回転機の前記第2ロータと前記熱機関との間の変速動作を行う変速装置をさらに備えることを特徴とする請求項8に記載の動力装置。
- 前記第2回転機と前記第2被駆動部との間の変速動作を行う変速装置をさらに備えることを特徴とする請求項8または9に記載の動力装置。
- 前記第1回転機の前記第1ロータは前記熱機関に機械的に連結され、前記第2ロータは前記被駆動部に機械的に連結されていることを特徴とする請求項1に記載の動力装置。
- 前記第1ロータの回転を制止するための制止装置をさらに備えることを特徴とする請求項11に記載の動力装置。
- 前記熱機関および前記第1ロータに機械的に連結された回転軸を有する第2回転機をさらに備えることを特徴とする請求項11に記載の動力装置。
- 前記第1回転機の前記第1ロータおよび前記第2回転機の前記回転軸と、前記熱機関との間を機械的に接続・遮断するクラッチをさらに備えることを特徴とする請求項13に記載の動力装置。
- 前記第1回転機の前記第2ロータと前記被駆動部との間の変速動作を行う変速装置をさらに備えることを特徴とする請求項13に記載の動力装置。
- 前記第2回転機の前記回転軸と前記熱機関との間の変速動作を行う変速装置をさらに備えることを特徴とする請求項13に記載の動力装置。
- 前記被駆動部とは別個の第2被駆動部と、
当該第2被駆動部に機械的に連結された第2回転機と、をさらに備えることを特徴とする請求項11に記載の動力装置。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008188281A JP4505524B2 (ja) | 2008-07-22 | 2008-07-22 | 動力装置 |
| EP09800278.5A EP2316682B1 (en) | 2008-07-22 | 2009-06-12 | Power device |
| RU2011106494/11A RU2457958C1 (ru) | 2008-07-22 | 2009-06-12 | Силовая установка |
| CN2009801232944A CN102066144B (zh) | 2008-07-22 | 2009-06-12 | 动力装置 |
| US13/003,482 US8350442B2 (en) | 2008-07-22 | 2009-06-12 | Power plant |
| BRPI0915985A BRPI0915985A2 (pt) | 2008-07-22 | 2009-06-12 | conjunto motor transmissão |
| PCT/JP2009/060787 WO2010010762A1 (ja) | 2008-07-22 | 2009-06-12 | 動力装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008188281A JP4505524B2 (ja) | 2008-07-22 | 2008-07-22 | 動力装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010023698A true JP2010023698A (ja) | 2010-02-04 |
| JP4505524B2 JP4505524B2 (ja) | 2010-07-21 |
Family
ID=41570229
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008188281A Expired - Fee Related JP4505524B2 (ja) | 2008-07-22 | 2008-07-22 | 動力装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8350442B2 (ja) |
| EP (1) | EP2316682B1 (ja) |
| JP (1) | JP4505524B2 (ja) |
| CN (1) | CN102066144B (ja) |
| BR (1) | BRPI0915985A2 (ja) |
| RU (1) | RU2457958C1 (ja) |
| WO (1) | WO2010010762A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012515297A (ja) * | 2009-01-15 | 2012-07-05 | ボルボ テクノロジー コーポレイション | 電磁式無段変速パワースプリットタービン複合発動機、並びにタービン複合発動機を含むエンジン及び車両 |
| JP2018017148A (ja) * | 2016-07-26 | 2018-02-01 | 株式会社Subaru | 熱発電システム |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE46449E1 (en) | 2007-07-09 | 2017-06-20 | Clearwater Holdings, Ltd. | Electromagnetic machine with independent removable coils, modular parts and self sustained passive magnetic bearing |
| JP4747184B2 (ja) * | 2008-04-14 | 2011-08-17 | 本田技研工業株式会社 | 電動機 |
| JP4759589B2 (ja) * | 2008-04-24 | 2011-08-31 | 本田技研工業株式会社 | 動力装置 |
| WO2010036221A1 (en) | 2008-09-26 | 2010-04-01 | Clearwater Holdings, Ltd. | Permanent magnet operating machine |
| CN103098356B (zh) * | 2010-08-04 | 2016-08-03 | 斯泰伦博斯大学 | 滑差永磁体机构 |
| DE102011050986A1 (de) * | 2011-06-09 | 2012-12-13 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Kraftfahrzeug mit quer angeordneter Brennkraftmaschine aufweisendem Antriebsstrang |
| RU2475926C1 (ru) * | 2011-07-29 | 2013-02-20 | Открытое акционерное общество "Научно-производственная корпорация "Космические системы мониторинга, информационно-управляющие и электромеханические комплексы имени А.Г. Иосифьяна" (ОАО "Корпорация "ВНИИЭМ") | Роторная система магнитоэлектрической машины |
| KR101294071B1 (ko) * | 2011-10-27 | 2013-08-07 | 현대자동차주식회사 | 하이브리드 차량용 시스템 |
| CN102564410B (zh) * | 2011-12-18 | 2014-09-24 | 西安航天精密机电研究所 | 一种导引头位标器的电磁结构 |
| JP5621794B2 (ja) * | 2012-01-30 | 2014-11-12 | 株式会社デンソー | 磁気変調式複軸モータ |
| JP5942687B2 (ja) * | 2012-08-08 | 2016-06-29 | 株式会社デンソー | 電気変速装置 |
| DE102013102184A1 (de) | 2012-03-09 | 2013-09-12 | Denso Corporation | Magnetmodulationsmotor und elektrische Transmission |
| DE102012009324A1 (de) * | 2012-05-08 | 2013-11-14 | Compact Dynamics Gmbh | Elektrisch zu betätigende Kupplung |
| US10505412B2 (en) | 2013-01-24 | 2019-12-10 | Clearwater Holdings, Ltd. | Flux machine |
| US10205358B2 (en) * | 2014-04-12 | 2019-02-12 | GM Global Technology Operations LLC | Electric machine for a vehicle powertrain and the electric machine includes a permanent magnet |
| CN103978887B (zh) * | 2014-05-28 | 2016-09-07 | 哈尔滨工业大学 | 输入分配型混合动力系统 |
| KR102540373B1 (ko) | 2014-07-23 | 2023-06-05 | 클리어워터 홀딩스, 엘티디. | 플럭스 장치 |
| WO2016049462A1 (en) | 2014-09-26 | 2016-03-31 | University Of Cincinnati | Enhanced dry-cooling system and method for increasing power plant efficiency and output |
| JP6485102B2 (ja) | 2015-02-20 | 2019-03-20 | スズキ株式会社 | 回転電機 |
| US10284036B2 (en) | 2015-08-24 | 2019-05-07 | GM Global Technology Operations LLC | Electric machine for hybrid powertrain with engine belt drive |
| US9925889B2 (en) | 2015-08-24 | 2018-03-27 | GM Global Technology Operations LLC | Electric machine for hybrid powertrain with dual voltage power system |
| JP6555019B2 (ja) | 2015-08-31 | 2019-08-07 | スズキ株式会社 | 回転電機 |
| JP6569396B2 (ja) * | 2015-08-31 | 2019-09-04 | スズキ株式会社 | 回転電機 |
| JP6387947B2 (ja) * | 2015-12-07 | 2018-09-12 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP6575544B2 (ja) * | 2017-02-09 | 2019-09-18 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP6546967B2 (ja) * | 2017-07-10 | 2019-07-17 | 本田技研工業株式会社 | 動力装置 |
| CN111357069B (zh) | 2017-09-08 | 2022-08-09 | 清水控股有限公司 | 用于增强电存储的系统和方法 |
| TWI881525B (zh) | 2017-10-29 | 2025-04-21 | 美商清水控股股份有限公司 | 維修及操作具有複數個線圈模組之電磁機器之方法 |
| US11705796B2 (en) * | 2018-10-09 | 2023-07-18 | Sou, Inc. | Electric motor |
| US10666099B1 (en) | 2018-11-26 | 2020-05-26 | GM Global Technology Operations LLC | Slotted permanent magnets for electric machines |
| CN111483313A (zh) * | 2019-01-28 | 2020-08-04 | 李广钊 | 一种油电结合无极变速箱控制系统 |
| RU2019115084A (ru) * | 2019-05-16 | 2020-11-16 | ООО "Миландр СМ" | Электромагнитный вариатор |
| US11323001B2 (en) | 2019-07-02 | 2022-05-03 | GM Global Technology Operations LLC | Segmented bar conductors for electric machines |
| US10780849B1 (en) | 2019-08-07 | 2020-09-22 | GM Global Technology Operations LLC | Electric drive units with integrated power electronics for vehicle powertrains |
| US11147193B2 (en) | 2020-02-25 | 2021-10-12 | GM Global Technology Operations LLC | Vascular cooling system for electrical conductors |
| US11230288B1 (en) | 2020-09-28 | 2022-01-25 | GM Global Technology Operations LLC | Optimized regenerative braking for hybrid electric vehicle (HEV) powertrain configurations |
| US11710993B2 (en) | 2020-10-28 | 2023-07-25 | GM Global Technology Operations LLC | Electric machines with features for enhancing load transfer performance of stacked-laminate rotors |
| US11993166B2 (en) * | 2021-04-29 | 2024-05-28 | Rivian Ip Holdings, Llc | Inverter module integratably mountable with drive unit of vehicle |
| US11942822B2 (en) | 2021-12-23 | 2024-03-26 | GM Global Technology Operations LLC | Stator tooth and winding conductor designs for electric machines |
| US12395025B2 (en) | 2023-04-12 | 2025-08-19 | GM Global Technology Operations LLC | Direct liquid cooling systems and methods for magnets of interior permanent magnet electric machines |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001157304A (ja) * | 1999-11-24 | 2001-06-08 | Denso Corp | ハイブリッド車用回転電機装置 |
| JP2002017004A (ja) * | 2001-04-18 | 2002-01-18 | Toyota Motor Corp | 動力出力装置 |
| JP2006353090A (ja) * | 2005-06-16 | 2006-12-28 | Lg Electronics Inc | 逆回転防止装置を備えた電動機 |
| JP2007116837A (ja) * | 2005-10-20 | 2007-05-10 | Toyota Central Res & Dev Lab Inc | 回転電機及びそれを備えるハイブリッド駆動装置 |
| WO2008018376A1 (en) * | 2006-08-09 | 2008-02-14 | Honda Motor Co., Ltd. | Auxiliary machine driver |
| WO2008050827A1 (fr) * | 2006-10-25 | 2008-05-02 | Honda Motor Co., Ltd. | Dispositif de puissance |
| WO2008078817A1 (ja) * | 2006-12-27 | 2008-07-03 | Honda Motor Co., Ltd. | 動力装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4198582A (en) * | 1977-06-24 | 1980-04-15 | Exxon Research & Engineering Co. | High performance stepper motor |
| BR9804426A (pt) * | 1998-10-16 | 2000-05-16 | Elevadores Atlas S A | Máquina elétrica de relutância subsìncrona. |
| JP4269544B2 (ja) * | 2000-09-14 | 2009-05-27 | 株式会社デンソー | 複数ロータ型同期機 |
| ITTO20011171A1 (it) * | 2001-12-14 | 2003-06-16 | C R F Societa Con Sortile Per | Sistema di trasmissione a rapporto variabile in modo continuo. |
| RU2290328C1 (ru) * | 2005-07-21 | 2006-12-27 | Василий Васильевич Шкондин | Полноприводное транспортное средство |
| CN101501965B (zh) * | 2006-08-10 | 2011-06-22 | 本田技研工业株式会社 | 混合动力车辆 |
| CN201150028Y (zh) * | 2007-10-29 | 2008-11-12 | 文明 | 一种新型电力变矩器 |
| JP4701269B2 (ja) * | 2008-02-08 | 2011-06-15 | 本田技研工業株式会社 | 磁気機械 |
| JP4747184B2 (ja) * | 2008-04-14 | 2011-08-17 | 本田技研工業株式会社 | 電動機 |
| JP4654289B2 (ja) * | 2008-08-29 | 2011-03-16 | 本田技研工業株式会社 | 補機駆動装置 |
-
2008
- 2008-07-22 JP JP2008188281A patent/JP4505524B2/ja not_active Expired - Fee Related
-
2009
- 2009-06-12 US US13/003,482 patent/US8350442B2/en active Active
- 2009-06-12 WO PCT/JP2009/060787 patent/WO2010010762A1/ja not_active Ceased
- 2009-06-12 EP EP09800278.5A patent/EP2316682B1/en active Active
- 2009-06-12 RU RU2011106494/11A patent/RU2457958C1/ru not_active IP Right Cessation
- 2009-06-12 BR BRPI0915985A patent/BRPI0915985A2/pt not_active IP Right Cessation
- 2009-06-12 CN CN2009801232944A patent/CN102066144B/zh not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001157304A (ja) * | 1999-11-24 | 2001-06-08 | Denso Corp | ハイブリッド車用回転電機装置 |
| JP2002017004A (ja) * | 2001-04-18 | 2002-01-18 | Toyota Motor Corp | 動力出力装置 |
| JP2006353090A (ja) * | 2005-06-16 | 2006-12-28 | Lg Electronics Inc | 逆回転防止装置を備えた電動機 |
| JP2007116837A (ja) * | 2005-10-20 | 2007-05-10 | Toyota Central Res & Dev Lab Inc | 回転電機及びそれを備えるハイブリッド駆動装置 |
| WO2008018376A1 (en) * | 2006-08-09 | 2008-02-14 | Honda Motor Co., Ltd. | Auxiliary machine driver |
| WO2008050827A1 (fr) * | 2006-10-25 | 2008-05-02 | Honda Motor Co., Ltd. | Dispositif de puissance |
| WO2008078817A1 (ja) * | 2006-12-27 | 2008-07-03 | Honda Motor Co., Ltd. | 動力装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012515297A (ja) * | 2009-01-15 | 2012-07-05 | ボルボ テクノロジー コーポレイション | 電磁式無段変速パワースプリットタービン複合発動機、並びにタービン複合発動機を含むエンジン及び車両 |
| JP2018017148A (ja) * | 2016-07-26 | 2018-02-01 | 株式会社Subaru | 熱発電システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US8350442B2 (en) | 2013-01-08 |
| CN102066144A (zh) | 2011-05-18 |
| US20110109180A1 (en) | 2011-05-12 |
| JP4505524B2 (ja) | 2010-07-21 |
| WO2010010762A1 (ja) | 2010-01-28 |
| BRPI0915985A2 (pt) | 2019-09-24 |
| EP2316682A1 (en) | 2011-05-04 |
| RU2457958C1 (ru) | 2012-08-10 |
| CN102066144B (zh) | 2013-06-05 |
| EP2316682B1 (en) | 2017-10-11 |
| EP2316682A4 (en) | 2016-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4505524B2 (ja) | 動力装置 | |
| JP4818368B2 (ja) | ハイブリッド車両 | |
| JP5362840B2 (ja) | ハイブリッド車両 | |
| JP5348808B2 (ja) | ハイブリッド車両 | |
| JP5309220B2 (ja) | 移動装置 | |
| JP5250523B2 (ja) | 動力装置 | |
| JP5220196B2 (ja) | 動力装置 | |
| JP2008179344A (ja) | 動力装置 | |
| JP4382118B2 (ja) | 動力装置 | |
| JP5256351B2 (ja) | 動力装置 | |
| JP5170781B2 (ja) | ハイブリッド車両 | |
| JP5171783B2 (ja) | 動力装置 | |
| JP5153587B2 (ja) | 動力装置 | |
| JP2009273295A (ja) | 動力装置 | |
| JP5171785B2 (ja) | 動力装置 | |
| JP2010120574A (ja) | 動力装置 | |
| JP2010195395A (ja) | 動力装置 | |
| JP2010195394A (ja) | 動力装置 | |
| JP2010184704A (ja) | 動力装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100330 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100426 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130430 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130430 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140430 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |