JP2010019694A - 液体の粘性又は/及び弾性測定法 - Google Patents
液体の粘性又は/及び弾性測定法 Download PDFInfo
- Publication number
- JP2010019694A JP2010019694A JP2008180590A JP2008180590A JP2010019694A JP 2010019694 A JP2010019694 A JP 2010019694A JP 2008180590 A JP2008180590 A JP 2008180590A JP 2008180590 A JP2008180590 A JP 2008180590A JP 2010019694 A JP2010019694 A JP 2010019694A
- Authority
- JP
- Japan
- Prior art keywords
- frequency value
- liquid
- value
- viscosity
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000007788 liquid Substances 0.000 title claims abstract description 114
- 238000000034 method Methods 0.000 title claims abstract description 10
- 238000005259 measurement Methods 0.000 claims description 80
- 238000000691 measurement method Methods 0.000 claims description 26
- 238000012360 testing method Methods 0.000 claims description 8
- 239000000523 sample Substances 0.000 description 30
- 230000014509 gene expression Effects 0.000 description 16
- 239000000243 solution Substances 0.000 description 5
- 238000012545 processing Methods 0.000 description 4
- 239000012085 test solution Substances 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000001902 propagating effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N11/00—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties
- G01N11/10—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties by moving a body within the material
- G01N11/16—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties by moving a body within the material by measuring damping effect upon oscillatory body
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N11/00—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties
- G01N11/10—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties by moving a body within the material
- G01N11/16—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties by moving a body within the material by measuring damping effect upon oscillatory body
- G01N11/162—Oscillations being torsional, e.g. produced by rotating bodies
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Investigating Strength Of Materials By Application Of Mechanical Stress (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
Abstract
【解決手段】検液子1の測定液内振動における振幅特性曲線上の共振周波数値(f0)と、同振幅特性曲線上の共振周波数値(f0)より低い低周波数値(f1)と、同振幅特性曲線上の共振周波数値(f0)より高い高周波数値(f2)の3つの周波数値を測定し、測定液のインピーダンスの実数部を上記高周波数値(f2)と低周波数値(f1)を用いて演算すると共に、測定液のインピーダンスの虚数部を上記共振周波数値(f0)を用いて演算し、該インピーダンスの実数部と虚数部から測定液の粘性値又は/及び弾性値を算出する。
【選択図】 図2
Description
図1におけるG1は測定液中において振動する検液子1の振動周波数に対する振幅の遅れ角、即ち位相角の特性曲線である。
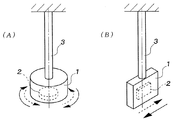
そして上記検液子1の振動モードとしては、図3Aに示すように、軸線を中心に円方向振動させるもの、図3Bに示すように、測定液中において横方向に振動させるもの等が用いられる。

Claims (3)
- 測定液内に検液子を浸着して振動せしめ測定液の粘性値又は/及び弾性値を測定する測定法において、上記検液子の測定液内振動における振幅特性曲線上の共振周波数値(f0)と、同振幅特性曲線上の共振周波数値(f0)より低い低周波数値(f1)と、同振幅特性曲線上の共振周波数値(f0)より高い高周波数値(f2)の3つの周波数値を測定し、測定液のインピーダンスの実数部を上記高周波数値(f2)と低周波数値(f1)を用いて演算すると共に、測定液のインピーダンスの虚数部を上記共振周波数値(f0)を用いて演算し、該インピーダンスの実数部と虚数部から測定液の粘性値又は/及び弾性値を算出することを特徴とする液体の粘性又は/及び弾性測定法。
- 測定液内に検液子を浸着して振動せしめ測定液の粘性値又は/及び弾性値を測定する測定法において、上記検液子の測定液内振動における振幅特性曲線上の共振周波数値(f0)と、同振幅特性曲線上の共振周波数値(f0)より低い低周波数値(f1)と、同振幅特性曲線上の共振周波数値(f0)より高い高周波数値(f2)の3つの周波数値を測定し、測定液のインピーダンスの実数部と虚数部を上記共振周波数値(f0)と低周波数値(f1)と高周波数値(f2)の3つの周波数値を用いて演算し、該インピーダンスの実数部と虚数部から測定液の粘性値又は/及び弾性値を算出することを特徴とする液体の粘性又は/及び弾性測定法。
- 上記低周波数値(f1)と高周波数値(f2)が上記測定液内振動における位相角特性曲線上の共振点に対して対称の位相角における周波数であることを特徴とする請求項1又は2記載の液体の粘性又は/及び弾性測定法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008180590A JP4555368B2 (ja) | 2008-07-10 | 2008-07-10 | 液体の粘弾性測定法 |
| GB0910581.8A GB2461618B (en) | 2008-07-10 | 2009-06-18 | Method for measuring viscosity and elasticity of liquid |
| US12/458,390 US8215156B2 (en) | 2008-07-10 | 2009-07-10 | Method for measuring viscosity and/or elasticity of liquid |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008180590A JP4555368B2 (ja) | 2008-07-10 | 2008-07-10 | 液体の粘弾性測定法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010019694A true JP2010019694A (ja) | 2010-01-28 |
| JP4555368B2 JP4555368B2 (ja) | 2010-09-29 |
Family
ID=40941074
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008180590A Expired - Fee Related JP4555368B2 (ja) | 2008-07-10 | 2008-07-10 | 液体の粘弾性測定法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8215156B2 (ja) |
| JP (1) | JP4555368B2 (ja) |
| GB (1) | GB2461618B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016518605A (ja) * | 2013-04-26 | 2016-06-23 | マイクロ モーション インコーポレイテッド | 振動式センサ及び振動式センサにて振動を変える方法 |
| JP2018500562A (ja) * | 2014-12-19 | 2018-01-11 | マイクロ モーション インコーポレイテッド | 振動要素の振動応答パラメータを決定する方法 |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SG178196A1 (en) * | 2009-08-14 | 2012-03-29 | Endress & Hauser Gmbh & Co Kg | Multivariable sensor for determining and/ or monitoring fill level and density and/ or viscosity of a liquid in a container |
| US9903830B2 (en) | 2011-12-29 | 2018-02-27 | Lifescan Scotland Limited | Accurate analyte measurements for electrochemical test strip based on sensed physical characteristic(s) of the sample containing the analyte |
| EP2805158B8 (en) | 2012-01-16 | 2020-10-07 | Abram Scientific, Inc. | Methods and devices for measuring physical properties of fluid |
| US8701498B2 (en) * | 2012-04-12 | 2014-04-22 | The University Of Sydney | Device for determining material properties |
| US9435762B2 (en) | 2013-06-27 | 2016-09-06 | Lifescan Scotland Limited | Fill error trap for an analyte measurement determined from a specified sampling time derived from a sensed physical characteristic of the sample containing the analyte |
| US9835578B2 (en) | 2013-06-27 | 2017-12-05 | Lifescan Scotland Limited | Temperature compensation for an analyte measurement determined from a specified sampling time derived from a sensed physical characteristic of the sample containing the analyte |
| US9435764B2 (en) | 2013-06-27 | 2016-09-06 | Lifescan Scotland Limited | Transient signal error trap for an analyte measurement determined from a specified sampling time derived from a sensed physical characteristic of the sample containing the analyte |
| US9459231B2 (en) | 2013-08-29 | 2016-10-04 | Lifescan Scotland Limited | Method and system to determine erroneous measurement signals during a test measurement sequence |
| US9243276B2 (en) | 2013-08-29 | 2016-01-26 | Lifescan Scotland Limited | Method and system to determine hematocrit-insensitive glucose values in a fluid sample |
| US9828621B2 (en) | 2013-09-10 | 2017-11-28 | Lifescan Scotland Limited | Anomalous signal error trap for an analyte measurement determined from a specified sampling time derived from a sensed physical characteristic of the sample containing the analyte |
| US20160091450A1 (en) | 2014-09-25 | 2016-03-31 | Lifescan Scotland Limited | Accurate analyte measurements for electrochemical test strip to determine analyte measurement time based on measured temperature, physical characteristic and estimated analyte value and their temperature compensated values |
| US20160091451A1 (en) | 2014-09-25 | 2016-03-31 | Lifescan Scotland Limited | Accurate analyte measurements for electrochemical test strip to determine analyte measurement time based on measured temperature, physical characteristic and estimated analyte value |
| AT516556B1 (de) * | 2014-12-03 | 2017-11-15 | Dipl Ing Niedermayer Alexander | Messsystem mit resonanten Sensoren und Verfahren zum Betrieb eines Resonators |
| CN105115858B (zh) * | 2015-09-10 | 2023-07-21 | 北京大学 | 一种基于机电阻抗法的粘度计及其检测方法 |
| CN110995104B (zh) * | 2019-12-04 | 2021-07-23 | 东南大学 | 一种永磁同步电机转子初始位置辨识方法 |
| JP7352329B2 (ja) * | 2019-12-26 | 2023-09-28 | 株式会社エー・アンド・デイ | 粘弾性測定方法および粘弾性測定装置 |
| CN113390757B (zh) * | 2021-07-20 | 2022-07-01 | 无锡亿利环保科技有限公司 | 一种石英音叉液体粘度传感器的标定与测量方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0618577A (ja) * | 1992-07-03 | 1994-01-25 | Tokyo Inst Of Technol | 水晶振動子のq値測定装置 |
| JPH0996600A (ja) * | 1995-09-29 | 1997-04-08 | Olympus Optical Co Ltd | 触覚センサ信号処理装置 |
| JPH10115648A (ja) * | 1996-10-11 | 1998-05-06 | Advantest Corp | 圧電振動子の等価回路定数測定法 |
| JP3348162B2 (ja) * | 2000-05-09 | 2002-11-20 | シービーシーマテリアルズ株式会社 | 液体の粘性測定法と粘弾性測定法並びに粘弾性測定装置 |
| JP2003240697A (ja) * | 2002-02-14 | 2003-08-27 | Semiconductor Leading Edge Technologies Inc | 膜特性の解析方法及び膜特性の解析装置 |
| JP2006052996A (ja) * | 2004-08-10 | 2006-02-23 | Ulvac Japan Ltd | 極値周波数の決定方法 |
| WO2007004376A1 (ja) * | 2005-06-30 | 2007-01-11 | Ulvac, Inc. | 水晶振動子を用いた測定方法及び測定装置 |
| JP4083621B2 (ja) * | 2003-04-24 | 2008-04-30 | 株式会社アルバック | 振動子を用いた分析方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4862384A (en) * | 1987-08-03 | 1989-08-29 | Rockwell International Corporation | Method of measuring the dynamic viscosity of a viscous fluid utilizing acoustic transducer |
| JPH0725103B2 (ja) | 1990-07-26 | 1995-03-22 | オリンパス光学工業株式会社 | 鏡面を有する光学成形体の成形方法 |
| US5201215A (en) * | 1991-10-17 | 1993-04-13 | The United States Of America As Represented By The United States Department Of Energy | Method for simultaneous measurement of mass loading and fluid property changes using a quartz crystal microbalance |
| US5741961A (en) * | 1993-08-18 | 1998-04-21 | Sandia Corporation | Quartz resonator fluid density and viscosity monitor |
| US5764068A (en) * | 1995-07-25 | 1998-06-09 | California Insitute Of Technology | Method for measuring mechanical properties of thin films using a resonator in an anti-resonance regime |
| US6289734B1 (en) * | 1999-03-01 | 2001-09-18 | Hysitron, Incorporated | In-situ non-destructive audiosonic identification system for visco-elastic materials |
| US7111500B2 (en) * | 2002-12-26 | 2006-09-26 | Ulvac Inc. | Analysis method using piezoelectric resonator |
-
2008
- 2008-07-10 JP JP2008180590A patent/JP4555368B2/ja not_active Expired - Fee Related
-
2009
- 2009-06-18 GB GB0910581.8A patent/GB2461618B/en not_active Expired - Fee Related
- 2009-07-10 US US12/458,390 patent/US8215156B2/en not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0618577A (ja) * | 1992-07-03 | 1994-01-25 | Tokyo Inst Of Technol | 水晶振動子のq値測定装置 |
| JPH0996600A (ja) * | 1995-09-29 | 1997-04-08 | Olympus Optical Co Ltd | 触覚センサ信号処理装置 |
| JPH10115648A (ja) * | 1996-10-11 | 1998-05-06 | Advantest Corp | 圧電振動子の等価回路定数測定法 |
| JP3348162B2 (ja) * | 2000-05-09 | 2002-11-20 | シービーシーマテリアルズ株式会社 | 液体の粘性測定法と粘弾性測定法並びに粘弾性測定装置 |
| JP2003240697A (ja) * | 2002-02-14 | 2003-08-27 | Semiconductor Leading Edge Technologies Inc | 膜特性の解析方法及び膜特性の解析装置 |
| JP4083621B2 (ja) * | 2003-04-24 | 2008-04-30 | 株式会社アルバック | 振動子を用いた分析方法 |
| JP2006052996A (ja) * | 2004-08-10 | 2006-02-23 | Ulvac Japan Ltd | 極値周波数の決定方法 |
| WO2007004376A1 (ja) * | 2005-06-30 | 2007-01-11 | Ulvac, Inc. | 水晶振動子を用いた測定方法及び測定装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016518605A (ja) * | 2013-04-26 | 2016-06-23 | マイクロ モーション インコーポレイテッド | 振動式センサ及び振動式センサにて振動を変える方法 |
| JP2017167159A (ja) * | 2013-04-26 | 2017-09-21 | マイクロ モーション インコーポレイテッド | 振動式センサ及び振動式センサにて振動を変える方法 |
| US10274409B2 (en) | 2013-04-26 | 2019-04-30 | Micro Motion, Inc. | Vibratory sensor and method of varying vibration in a vibratory sensor |
| US10955326B2 (en) | 2013-04-26 | 2021-03-23 | Micro Motion, Inc. | Vibratory sensor and method of varying vibration in a vibratory sensor |
| JP2018500562A (ja) * | 2014-12-19 | 2018-01-11 | マイクロ モーション インコーポレイテッド | 振動要素の振動応答パラメータを決定する方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8215156B2 (en) | 2012-07-10 |
| GB2461618A (en) | 2010-01-13 |
| GB2461618B (en) | 2012-07-04 |
| GB0910581D0 (en) | 2009-07-29 |
| US20100005865A1 (en) | 2010-01-14 |
| JP4555368B2 (ja) | 2010-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4555368B2 (ja) | 液体の粘弾性測定法 | |
| JP4884506B2 (ja) | 音叉−走査探針結合振動計 | |
| JP5020403B1 (ja) | 振動式物性測定装置及び方法 | |
| EP3168598A1 (en) | Viscoelastic property measuring device and viscoelastic property measuring method | |
| Weinberg et al. | Fluid damping in resonant flexural plate wave device | |
| JP4953140B2 (ja) | 質量測定装置及びカンチレバ | |
| JP3348162B2 (ja) | 液体の粘性測定法と粘弾性測定法並びに粘弾性測定装置 | |
| KR101282452B1 (ko) | 유체의 밀도 및 점도 동시 측정 장치 | |
| CN105115858B (zh) | 一种基于机电阻抗法的粘度计及其检测方法 | |
| JP2009281932A (ja) | 濃度計測装置及び溶液濃度を計測する方法 | |
| CN110308061A (zh) | 基于三维结构的材料弹性模量和密度的测量方法和系统 | |
| JP5831904B2 (ja) | 粘弾性測定方法及び粘弾性測定装置 | |
| KR101842350B1 (ko) | 멤브레인의 기계적 공진 특성을 이용한 컨덴서형 멤브레인 센서용 측정 장치 및 방법 | |
| JP3374973B2 (ja) | 定断面作動体の出力圧の測定方法及び測定装置 | |
| JP7049465B2 (ja) | 二次元ナノインデンテーション装置及び方法 | |
| CN105182007B (zh) | 一种超声激励下纳米材料表面力学参量表征的方法 | |
| JP7352329B2 (ja) | 粘弾性測定方法および粘弾性測定装置 | |
| JP2000055776A (ja) | 構造物の曲げ剛性測定方法 | |
| JP5483113B2 (ja) | 粘度計 | |
| JP2011033614A (ja) | 音叉型水晶触覚センサの利用方法 | |
| KR20100081526A (ko) | 점도 측정 장치 및 점도 측정 방법 | |
| JP2013088129A (ja) | 超音波粘弾性特性測定方法および装置 | |
| CN114002092B (zh) | 疲劳实验中载荷传感器的测量误差实时补偿方法 | |
| US9897522B2 (en) | Method for determining mechanical properties of a material | |
| JP2009204318A (ja) | 振動型粘度計 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20091027 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100302 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100525 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100618 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100713 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100715 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130723 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |