JP2010008286A - 散乱体内部計測装置及び散乱体内部計測方法 - Google Patents
散乱体内部計測装置及び散乱体内部計測方法 Download PDFInfo
- Publication number
- JP2010008286A JP2010008286A JP2008169459A JP2008169459A JP2010008286A JP 2010008286 A JP2010008286 A JP 2010008286A JP 2008169459 A JP2008169459 A JP 2008169459A JP 2008169459 A JP2008169459 A JP 2008169459A JP 2010008286 A JP2010008286 A JP 2010008286A
- Authority
- JP
- Japan
- Prior art keywords
- scatterer
- light
- dimensional image
- information
- depth
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Abstract
【解決手段】散乱体内部の測定対象の情報を取得する散乱体内部計測装置であって、前記測定対象と前記散乱体とで光学特性の異なる光を前記散乱体に照射する照明手段と、前記照明手段により照射された光の後方散乱光を2次元画像として検出する検出手段と、前記検出手段により取得された2次元画像データにおいて前記測定対象の存在の有無を確認し、前記2次元画像上における前記照射位置と前記測定対象が確認された位置との距離から、前記散乱体における前記測定対象の深度を含めた位置情報を求める解析手段とを備え、前記照明手段と前記検出手段が前記散乱体に非接触で計測が行われることを特徴とする散乱体内部計測装置を提供する。
【選択図】 図1
Description
さらに照射位置を移動させることにより、多くの情報を簡便且つ短時間で取得することができ、容易に断層画像を作成することができる。
(第1の実施形態)
図1は本発明の第1の実施形態に係る散乱体内部計測装置1のブロック構成図である。同図に示すように、散乱体内部計測装置1は、可動性の光照射部10、検出部11、制御/解析部12、メモリ13、表示部14、入力部15を具備している。
一つの解析方法として、得られた2次元画像データから、測定対象の位置と深度が解析される。
図3は散乱体内部の光の伝搬の様子を表す概念図である。一般的に散乱体に照射された光は、散乱体内部で散乱を繰り返すうちに散乱の異方性が失われて等方散乱に近づく。この結果、平均的な光経路の断面はバナナ状になることが知られている。
図4に、計測領域で計測される後方散乱光の模式図を示した。光照射部10から散乱体上に光が照射された位置をバツ印で示し、検出部11によって撮像される計測領域40を点線で示した。散乱体8によって反射、散乱、吸収され、散乱体表面から出射された後方散乱光は、図に示すように照射位置を中心とする同心円状になる。ここで、図4(a)に示すように、同心円の直径が大きくなるほど、散乱体のより深部を通ってきた光である。図4(b)においては同心円領域41、42及び43は、それぞれが略同じ深度の情報を有すると見なすことができる。またその深度は照射位置からその同心円までの距離に対応するため、同心円領域41、42及び43の順に深度が深い。よって、2次元画像データから、同心円領域の画像データを抽出することにより、一定の深度における画像データを選択的に取り出すことができ、選択されたデータから該深度での断層画像を作成することができる。
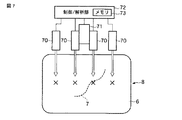
図5は、光照射部10による照射位置を変化させて測定した様子を示す。検出部11は固定されており、計測領域50も移動しない。しかし、光照射部10によって照射する位置を変動させることにより、上述したような同心円領域が移動する。この様子を図6に示す。
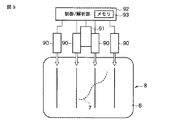
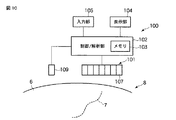
次に、本発明の第2の実施形態を説明する。図10は、第2の実施形態に係る散乱体内部計測装置100のブロック構成図である。本散乱体内部計測装置100においては、光照明部109が可動可能に備えられる。また、検出部101は光検出素子107を複数具備する。光検出素子107は、散乱体8の表面に沿って光照射部109から遠ざかる一方向に沿って配列されてもよく、或いは、散乱体8の表面に沿って二次元マトリックス状に配列されてもよい。
次に、本発明の第3の実施形態を説明する。図11は、第3の実施形態に係る散乱体内部計測装置110のブロック構成図である。本散乱体内部計測装置110においては、光照明部119及び検出部120が可動可能に備えられる。
Claims (11)
- 散乱体内部の測定対象の情報を取得する散乱体内部計測装置であって、
前記測定対象と前記散乱体とで光学特性の異なる光を前記散乱体に照射する照明手段と、
前記照明手段により照射された光の後方散乱光を2次元画像として検出する検出手段と、
前記検出手段により取得された2次元画像データにおいて前記測定対象の存在の有無を確認し、前記2次元画像上における前記照射位置と前記測定対象が確認された位置との距離から、前記散乱体における前記測定対象の深度を含めた位置情報を求める解析手段とを備え、
前記照明手段と前記検出手段が、前記散乱体に非接触で計測が行われることを特徴とする、散乱体内部計測装置。 - 複数の照射位置において取得された複数の2次元画像データを記憶する記憶手段と、
前記解析手段による解析結果を表示する表示手段をさらに具備し、
前記解析手段が、前記記憶手段により記憶された複数の2次元画像データを基に、所望の深度における断層画像を作成することを特徴とする、請求項1に記載の散乱体内部計測装置。 - 前記照明手段が、一以上の点状又は線状の光を照射する手段である、請求項1又は2に記載の散乱体内部計測装置。
- 前記解析手段が、前記記憶手段により記憶された複数の2次元画像データ上で、所望の位置と前記照射位置との間の距離と等しい距離だけ前記所望の位置から離れた位置におけるデータを解析することにより、前記所望の位置の任意の深度における情報を得ることを特徴とする、請求項2又は3に記載の散乱体内部計測装置。
- 散乱体内部の測定対象の情報を取得する散乱体内部計測装置であって、
前記測定対象と前記散乱体とで光学特性の異なる光を前記散乱体に照射する可動可能な照明手段と、
前記照明手段により照射された光の後方散乱光を検出する複数の検出手段と、
深度情報を得たい所望の位置を中心として、前記照射位置と対称となる位置にある検出手段によって取得されたデータを解析することにより、前記所望の位置の任意の深度における情報を得る解析手段とを備えることを特徴とする、散乱体内部計測装置。 - 散乱体内部の測定対象の情報を取得する散乱体内部計測装置であって、
前記測定対象と前記散乱体とで光学特性の異なる光を前記散乱体に照射する照明手段と、
前記照明手段により照射された光の後方散乱光を検出する検出手段と、
前記検出手段により取得された後方散乱光強度のデータから、所望の位置の任意の深度における情報を得る解析手段とを備え、
前記照明手段と前記検出手段とが、前記所望の位置を中心として等距離に配置されることを特徴とする、散乱体内部計測装置。 - 散乱体内部の測定対象の情報を取得する散乱体内部計測方法であって、
前記測定対象と前記散乱体とで光学特性の異なる光を前記散乱体に照射する工程と、
前記照射された光の後方散乱光を2次元画像として検出する工程と、
前記検出された2次元画像データにおいて前記測定対象の存在の有無を確認し、前記2次元画像上における前記照射位置と前記測定対象が確認された位置との距離から、前記散乱体における前記測定対象の深度を含めた位置情報を求める工程とを含み、
前記光の照射と検出は、前記散乱体に接触せずに行うことを特徴とする方法。 - 前記散乱体に複数の異なる位置で光を照射し、各照射位置について検出された複数の2次元画像データを記憶する工程と、
前記記憶された複数の2次元画像データから、前記散乱体内部の所望の深度における断層画像を作成する工程とをさらに含む、請求項7に記載の方法。 - 前記散乱体に複数の異なる位置で光を照射し、各照射位置について検出された複数の2次元画像データを記憶する工程と、
前記記憶された複数の2次元画像データ上で、所望の位置と前記照射位置との間の距離と等しい距離だけ前記所望の位置から離れた位置におけるデータを解析することにより、前記所望の位置の任意の深度における情報を得る工程をさらに含む、請求項7に記載の方法。 - 散乱体内部の測定対象の情報を取得する散乱体内部計測方法であって、
前記測定対象と前記散乱体とで光学特性の異なる光を前記散乱体に照射する工程と、
前記照射された光の後方散乱光を複数の検出手段を用いて検出する工程と、
深度情報を得たい所望の位置を中心として、前記照明位置と対称となる位置にある検出手段によって取得されたデータを解析することにより、前記所望の位置の任意の深度における情報を得る工程を含み、
前記照明位置が情報を得たい深度に基づいて決定されることを特徴とする方法。 - 散乱体内部の測定対象の情報を取得する散乱体内部計測方法であって、
前記測定対象と前記散乱体とで光学特性の異なる光を前記散乱体に照射する工程と、
前記照射された光の後方散乱光を検出する工程と、
前記検出された後方散乱光強度のデータから、所望の位置の任意の深度における情報を得る工程とを含み、
前記照射と前記検出とが、前記所望の位置を中心として等距離で行われ、その中心からの距離が情報を得たい深度に基づいて決定されることを特徴とする方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008169459A JP5451991B2 (ja) | 2008-06-27 | 2008-06-27 | 散乱体内部計測装置及び散乱体内部計測方法 |
| PCT/JP2009/055486 WO2009157229A1 (ja) | 2008-06-27 | 2009-03-19 | 散乱体内部観察装置および散乱体内部観察方法 |
| US12/978,932 US9055866B2 (en) | 2008-06-27 | 2010-12-27 | Internal observation device for object having light scattering properties, internal body observation device, endoscope for internal observation and internal observation method |
| US14/708,654 US20150238089A1 (en) | 2008-06-27 | 2015-05-11 | Internal observation device for object having light scattering properties, internal body observation device, endoscope for internal observation and internal observation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008169459A JP5451991B2 (ja) | 2008-06-27 | 2008-06-27 | 散乱体内部計測装置及び散乱体内部計測方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010008286A true JP2010008286A (ja) | 2010-01-14 |
| JP5451991B2 JP5451991B2 (ja) | 2014-03-26 |
Family
ID=41588968
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008169459A Expired - Fee Related JP5451991B2 (ja) | 2008-06-27 | 2008-06-27 | 散乱体内部計測装置及び散乱体内部計測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5451991B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103006228A (zh) * | 2012-11-09 | 2013-04-03 | 北京服装学院 | 一种人体形态特征的测量方法 |
| WO2019082594A1 (ja) * | 2017-10-25 | 2019-05-02 | パナソニックIpマネジメント株式会社 | 計測装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002515277A (ja) * | 1998-05-18 | 2002-05-28 | アボット・ラボラトリーズ | 組織温度のコントロールを伴う非侵襲的光学センサー |
| JP2002531846A (ja) * | 1998-12-07 | 2002-09-24 | レア メディツィンテクニック ゲーエムベーハー | 深さ方向を分解する光学的分光法および分光測定法用の検出プローブ |
| JP2003010189A (ja) * | 2001-07-04 | 2003-01-14 | Communication Research Laboratory | 生体機能情報撮像装置 |
| JP2004528542A (ja) * | 2001-03-06 | 2004-09-16 | フォーリノーバ、アクティーゼルスカブ | 多層組織の光学的性質の測定のための方法および集成装置 |
| JP2005538752A (ja) * | 2002-03-19 | 2005-12-22 | デイヴィッド アール ミラー | 血管アクセスブラッド流量の経皮的測定用センサ |
| WO2007105495A1 (ja) * | 2006-03-13 | 2007-09-20 | Olympus Medical Systems Corp. | 散乱媒質内部観察装置、撮像システム、撮像方法及び内視鏡装置 |
| JP2007330381A (ja) * | 2006-06-13 | 2007-12-27 | Hitachi Medical Corp | 生体光計測装置 |
| JP2008510586A (ja) * | 2004-08-24 | 2008-04-10 | ザ ジェネラル ホスピタル コーポレイション | 血管セグメントを画像化する方法および装置 |
-
2008
- 2008-06-27 JP JP2008169459A patent/JP5451991B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002515277A (ja) * | 1998-05-18 | 2002-05-28 | アボット・ラボラトリーズ | 組織温度のコントロールを伴う非侵襲的光学センサー |
| JP2002531846A (ja) * | 1998-12-07 | 2002-09-24 | レア メディツィンテクニック ゲーエムベーハー | 深さ方向を分解する光学的分光法および分光測定法用の検出プローブ |
| JP2004528542A (ja) * | 2001-03-06 | 2004-09-16 | フォーリノーバ、アクティーゼルスカブ | 多層組織の光学的性質の測定のための方法および集成装置 |
| JP2003010189A (ja) * | 2001-07-04 | 2003-01-14 | Communication Research Laboratory | 生体機能情報撮像装置 |
| JP2005538752A (ja) * | 2002-03-19 | 2005-12-22 | デイヴィッド アール ミラー | 血管アクセスブラッド流量の経皮的測定用センサ |
| JP2008510586A (ja) * | 2004-08-24 | 2008-04-10 | ザ ジェネラル ホスピタル コーポレイション | 血管セグメントを画像化する方法および装置 |
| WO2007105495A1 (ja) * | 2006-03-13 | 2007-09-20 | Olympus Medical Systems Corp. | 散乱媒質内部観察装置、撮像システム、撮像方法及び内視鏡装置 |
| JP2007330381A (ja) * | 2006-06-13 | 2007-12-27 | Hitachi Medical Corp | 生体光計測装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103006228A (zh) * | 2012-11-09 | 2013-04-03 | 北京服装学院 | 一种人体形态特征的测量方法 |
| WO2019082594A1 (ja) * | 2017-10-25 | 2019-05-02 | パナソニックIpマネジメント株式会社 | 計測装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5451991B2 (ja) | 2014-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6587385B2 (ja) | 被検体情報取得装置および被検体情報取得方法 | |
| JP5684443B2 (ja) | 生体成分測定装置 | |
| KR102054382B1 (ko) | 피검체 정보 취득장치 및 그 제어 방법 | |
| US10820826B2 (en) | Multiple optical fusion-image based method and apparatus for diagnosing brain tumor in real-time | |
| EP2868263B1 (en) | Photoacoustic mammography apparatus and method | |
| WO2015162899A1 (en) | Photoacoustic apparatus, method of controlling photoacoustic apparatus, and program | |
| JP6745889B2 (ja) | 光音響画像生成装置 | |
| US9200886B2 (en) | Method and system for optical coherence tomography | |
| WO2009157229A1 (ja) | 散乱体内部観察装置および散乱体内部観察方法 | |
| US20160058295A1 (en) | Photoacoustic wave measurement apparatus and photoacoustic wave measurement method | |
| JP5451991B2 (ja) | 散乱体内部計測装置及び散乱体内部計測方法 | |
| JP5262102B2 (ja) | 光計測装置 | |
| JP6486085B2 (ja) | 光音響波測定装置 | |
| US20140049781A1 (en) | Method and System for Optical Coherence Tomography | |
| JP2017529913A (ja) | 光音響装置 | |
| US20170086679A1 (en) | Photoacoustic apparatus and method for acquiring object information | |
| JP2010223770A (ja) | 散乱体内部観察装置および散乱体内部観察方法 | |
| JP2009005721A (ja) | 脈波計測方法及びそれに用いる脈波計測装置 | |
| JP6628891B2 (ja) | 光音響画像生成装置 | |
| EP3329843A1 (en) | Display control apparatus, display control method, and program | |
| JP2021014988A (ja) | 計測装置 | |
| JP5188909B2 (ja) | 散乱体内部観測装置及び散乱体内部観測方法 | |
| JP2007085775A (ja) | 試料分析装置 | |
| US20200085345A1 (en) | Object information acquisition apparatus and method of controlling the same | |
| JP2010060330A (ja) | 散乱体内部観察装置および散乱体内部観察方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110613 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130409 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130610 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131227 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5451991 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |