JP2010005149A - 粒子線治療装置用マルチリーフコリメータ - Google Patents
粒子線治療装置用マルチリーフコリメータ Download PDFInfo
- Publication number
- JP2010005149A JP2010005149A JP2008168102A JP2008168102A JP2010005149A JP 2010005149 A JP2010005149 A JP 2010005149A JP 2008168102 A JP2008168102 A JP 2008168102A JP 2008168102 A JP2008168102 A JP 2008168102A JP 2010005149 A JP2010005149 A JP 2010005149A
- Authority
- JP
- Japan
- Prior art keywords
- leaf
- torque
- absolute
- motor
- particle beam
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Landscapes
- Radiation-Therapy Devices (AREA)
Abstract
【解決手段】リーフ8Lを開き、トルク算出手段が算出するモータ3Lのトルク値が所定の時間継続して所定の値を超えた時に、リーフ8Lがストッパ7Lに接触したと検知して、エンコーダ5Lの発生するパルスを積算するパルス積算値12Pをクリアする。
再度ストッパ7Lにリーフ8Lを接触させて、パルス積算値が0近傍であるか否かでリーフ駆動装置30の異常を判定する。
【選択図】図1
Description
また画像情報により異常検出するタイプでは画像撮影装置を装置に組み込む必要があり装置が大型化してしまい、更にコストが高いという問題があった。
この発明は、上記のような課題を解決するためになされたものであり、安価なインクリメンタルエンコーダだけでリーフの動作異常を検出できる粒子線治療用マルチリーフコリメータの提供を目的としている。
エンコーダが発生させるパルスからリーフの絶対位置を算出するリーフ絶対位置算出手段と、リーフの現在の絶対位置と、リーフが移動すべき位置を指令するリーフ絶対目標位置指令から、それぞれのモータの出力すべきトルクを算出するトルク算出手段と、算出トルクをモータに流す電流に変換するトルク/電流変換手段とからなるリーフ制御装置
を備えた粒子線治療装置用マルチリーフコリメータにおいて、
リーフがストッパに接触する位置を原点とし、リーフを全開方向に移動しトルク算出手段が算出するトルク値が所定の時間継続して所定の値を超えたことにより、リーフがストッパに接触したことを検知した時、
リーフ絶対位置算出手段が算出するリーフ絶対位置が原点から所定の範囲内に無いときは、リーフ駆動装置は異常、所定の範囲内にあるときは正常であると判定するものである。
リーフの現在の絶対位置と、リーフが移動すべき位置を指令するリーフ絶対目標位置指令からそれぞれのモータの出力すべきトルクを算出するトルク算出手段と、算出したトルクをモータに流す電流に変換するトルク/電流変換手段とからなるリーフ制御装置
を備えた粒子線治療装置用マルチリーフコリメータにおいて、
リーフがストッパに接触する位置を原点とし、正対する2枚のリーフを互いに閉じる方向へ移動させ、トルク算出手段が算出する一方又は両方のモータのトルク値が所定の時間継続して所定の値を超えたことにより2枚のリーフの接触を検知した時、
2枚のリーフに対応するリーフ絶対位置算出手段が算出する2つの絶対位置の和と、1枚のリーフの最大移動可能距離の差が、所定の範囲内に無いときはリーフ駆動装置は異常、所定の範囲にあるときは正常と判定するものである。
エンコーダが発生させるパルスからリーフの絶対位置を算出するリーフ絶対位置算出手段と、リーフの現在の絶対位置と、リーフが移動すべき位置を指令するリーフ絶対目標位置指令から、それぞれのモータの出力すべきトルクを算出するトルク算出手段と、算出トルクをモータに流す電流に変換するトルク/電流変換手段とからなるリーフ制御装置
を備えた粒子線治療装置用マルチリーフコリメータにおいて、
リーフがストッパに接触する位置を原点とし、リーフを全開方向に移動しトルク算出手段が算出するトルク値が所定の時間継続して所定の値を超えたことにより、リーフがストッパに接触したことを検知した時、
リーフ絶対位置算出手段が算出するリーフ絶対位置が原点から所定の範囲内に無いときは、リーフ駆動装置は異常、所定の範囲内にあるときは正常であると判定するものなので、開方向への動作による診断処理を粒子線の照射前後におこなうことで、エンコーダの間欠故障、モータ軸のスリップ、歯車の欠損、リーフに刻まれた歯の欠損よる位置不良やエンコーダとリーフ制御装置2間の接触不良によるパルスの欠損による位置不良、エンコーダとリーフ制御装置間の外線に重畳したノイズによるパルスの追加による位置不良の検出が可能となり、信頼性の高いマルチリーフコリメータを安価に簡単に得ることができ、粒子線の誤照射を未然に防止することができる。
リーフの現在の絶対位置と、リーフが移動すべき位置を指令するリーフ絶対目標位置指令からそれぞれのモータの出力すべきトルクを算出するトルク算出手段と、算出したトルクをモータに流す電流に変換するトルク/電流変換手段とからなるリーフ制御装置
を備えた粒子線治療装置用マルチリーフコリメータにおいて、
リーフがストッパに接触する位置を原点とし、正対する2枚のリーフを互いに閉じる方向へ移動させ、トルク算出手段が算出する一方又は両方のモータのトルク値が所定の時間継続して所定の値を超えたことにより2枚のリーフの接触を検知した時、
2枚のリーフに対応するリーフ絶対位置算出手段が算出する2つの絶対位置の和と、1枚のリーフの最大移動可能距離の差が、所定の範囲内に無いときはリーフ駆動装置は異常、所定の範囲にあるときは正常と判定するものなので、閉方向への動作による診断処理を粒子線の照射前後におこなうことで、エンコーダの間欠故障、軸のスリップ、歯車の欠損、リーフに刻まれた歯の欠損よる位置不良やエンコーダとリーフ制御装置間の接触不良によるパルスの欠損による位置不良、エンコーダとリーフ制御装置間の外線に重畳したノイズによるパルスの追加による位置不良の検出が可能となり、信頼性の高いマルチリーフコリメータを得ることができる。
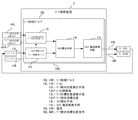
この発明の実施の形態1を図に基づいて説明する。図1はマルチリーフコリメータ20の構成図である。上位計算機1にはリーフ駆動装置30を制御するためのリーフ制御装置2が接続されている。リーフ駆動装置30は、リーフを駆動するモータ3L、3R、モータの回転軸4L、4R、各モータの軸の回転が伝達され所定のパルスを発生するエンコーダ5L、5R及び歯車6L、6R、粒子線の照射野を形成するリーフ8L,8R及び、両リーフの最大開(図の上下方向に最大限開いた状態)位置を検出するためのストッパ7L、7Rで構成される。
粒子線は図1手前から、リーフ8L、8Rの間を通って奥側に照射され、リーフ8L、8Rに当たる部分では粒子線が遮断され通過しない。マルチリーフコリメータ20のリーフ8L、8Rの間を通過して粒子線が照射される部分が照射野9となる。
実際のマルチリーフコリメータ20は、このように対をなすリーフ8L、8Rが多数組、図1の左右方向に並設されていて複雑な照射野形状を作ることができる。
以下の説明では主にリーフ8L、必要に応じてリーフ8Lとリーフ8Rの動作について説明するが、他のリーフの動作も同様である。
リーフ制御装置2の処理の概略を説明する。リーフ制御装置2にはリーフの数だけリーフ制御ブロックがあり、1つの制御ブロックが1枚のリーフの動作を制御する。そしてリーフ制御ブロック10Lはリーフ8Lの動作を制御する制御ブロックである。リーフ絶対位置算出手段12Lはエンコーダ5Lが発生するパルス11Lの回数を積算してリーフの現在の絶対位置情報となるパルス積算値12LPを算出する。
リーフ目標位置変換手段13Lは上位計算機からリーフ絶対目標位置指令40Lを受け、そのリーフ絶対目標位置を現在のリーフの位置からの相対位置であるリーフ相対目標位置13LPに変換する。トルク算出手段14Lは、リーフ相対目標位置13LPとパルス積算値12LPから、現在モータ3Lが出力すべきトルク算出する。この値をトルク/電流変換手段15Lでモータ3Lに印加する電流に変換してモータを駆動する。
このように、パルスは軸4Lの回転に合わせて規則正しく発生し、回転方向を判別できるので、パルスの正負の発生回数を最初から積算するとリーフの現在位置を特定できることになる。つまり、この実施の形態のマルチリーフコリメータ20は、リーフの絶対位置を直接検出する手段は備えていないが、予め計測したリーフの移動距離とその移動距離に対してエンコーダが発生するパルスの発生回数の関係を表す関数を保持することにより、エンコーダが発生するパルスの積算値から間接的に現在のリーフの絶対位置を算出できることになる。
モータ3Lを制御するリーフ制御ブロック10Lのリーフ絶対位置算出手段12Lには、エンコーダ5Lより得られるパルス11Lが入力される。リーフ絶対位置算出手段12Lはパルス11Lの発生回数に、リーフの移動向きに応じた正負の符号付けて積算しパルス積算値12LPとして保持する。
リーフ絶対目標位置指令40Lは上位計算機1より指示された、リーフが移動すべき絶対目標位置である。このリーフ絶対目標位置指令40Lを元に、リーフ目標位置変換手段13Lで、現在のリーフの絶対位置からのリーフの相対的な目標位置であるリーフ相対目標位置13LPを算出する。
リーフ絶対目標位置指令40Lとリーフ相対目標位置13LP(移動方向と距離)の関係について、「移動距離」と「リーフの絶対位置」と「パルス積算値」の関係に言及しながら説明する。
リーフ8L、8Rに対して仮に同時に閉方向に無限大に移動する指示を与えたとする。各リーフはそれぞれの原点から閉方向に等しく無限大に移動しようとし、それぞれのリーフの先端がストッパ7L、7Rの中間点で衝突して止まる。この時エンコーダ5L,5Rが発生する正のパルスの発生回数が共に5000回であったとする。この場合、それぞれのリーフの先端の絶対位置は0−10000範囲で指定できることになる。なぜなら、各リーフは中間位置を越えて移動できるので、1枚のリーフが原点から他のリーフの最大開位置まで移動する場合があるからである。
リーフが同一方向に動く場合のリーフの移動距離とエンコーダが発生するパルスの回数は比例し、この関数はリーフ制御装置2で保持している。ここでは説明の都合上パルス1回に対して、距離1が対応するとする。
以上のように現在のリーフの絶対位置は、モータの軸に接続されたエンコーダが発生するパルス積算値12LP、12RPとして間接的に求めることができ、次にリーフが取るべきリーフ相対目標位置13LP(移動方向と距離)はリーフの現在位置からの相対位置(正負の符号とエンコーダのパルス発生回数)として与え得ることが分かる。
この実施の形態でのマルチリーフコリメータには3種類の動作モードがある。
第1のモードは原点復帰モードである。装置の起動直後に各リーフを最大開位置まで移動し、この位置で各リーフの絶対位置算出手段のパルス積算値をクリアして0とする。これにより各リーフの原点(0)がそれぞれのリーフの最大開の位置にセットできる。
第2のモードは通常動作モードである。通常の装置の運用はこのモードで使用する。
第3のモードは診断モードである。診断モードではリーフ駆動装置に誤動作がないかを診断する。
図3は通常モードでのトルク算出手段14Lの処理を示しており、その処理は周期的(1msec/回)に行われている。
トルク算出手段14Lは、まずステップS141でリーフ8Lの先述したリーフ相対目標位置13LPを取得する。
次にステップS142で、現時点目標位置を取得する。ここで取得する現時点目標位置とは、これまで説明してきたリーフ相対目標位置13LPとは異なる。現時点目標位置は具体的には、1msec後にリーフ8Lが在るべき位置を指し、トルク算出手段14Lに内蔵する関数から取得できる。その関数を示したものが図4である。
図4は、リーフ8Lの移動速度と経過時間との関係を示すものである。リーフ8Lを移動させるとき、トルク算出手段14Lは図4に示す関係に沿って、最初は加速して速度を上げ、一定速度に達すると均一速度を維持し、リーフ目標位置に近づくと減速して静止するようにリーフ8Lのスピードを制御する。
この時、図4のXY両軸と速度を表す各線分で囲まれる台形部分の面積は、リーフ相対目標位置13LPまでの距離を表す。加速、減速時の加速度及び等速移動速度が予め決まっているとすると、リーフ相対目標位置13LPが決まれば、このグラフの関係から計算して移動開始から一定時間後のリーフの在るべき計算上の絶対位置を求めることができる。
トルク算出手段14Lでは定期周期(1msec/回)で図3のフローチャートを実行するので、次の周期(1msec)後にリーフ8Lが存在すべき位置は算出できることになり、この位置を「現時点目標位置」として設定する。
この現時点目標位置は2回目以降は、ステップS150で更新されるが、処理の最初ではステップS142で与えてやらなければならない。
現時点目標位置が1msec後にリーフ8Lが在るべき計算上の位置であるのに対して、エンコーダ5Lが発生するパルスの積算値であるパルス積算値12LPは現実にリーフ8Lが存在する絶対位置を表すことになる。
リーフ制御速度は、現時点目標位置に到達していなければ速度を速め、現時点目標位置を超えていれば速度を落とし、さらにPID制御によりトルクを算出する。
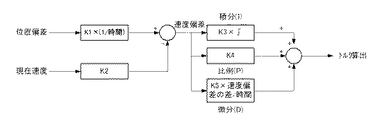
位置偏差と現在速度からモータトルクを算出する方法を図7を用いて簡単に説明する。
K1−K5はモータの特性に合わせて予め算出してある定数である。
(1)位置偏差から、K1×(1/時間)により、その位置偏差を埋め合わせるための速度指令を算出する。
(2)現在速度に定数K2を乗じ、(1)で求めた速度指令と合わせて速度偏差を求める。
(3)求められた速度偏差に対する積分値と比例値と微分値を算出し、その和を求めトルクとする。
所定の時間以上モータ3Lの算出トルクが所定の値を超えるということは、リーフ8Lが予定通り動いていないことを意味する。リーフ8L又は他の部品に何らかの異常が発生していると考えられるので上位計算機1に異常発生を報告して処理を中止する。
なお、このような状態をトルク超過と呼ぶ。
以上が通常モードでのトルク算出手段14Lの動作である。
通常モードでは各リーフは以上のような処理によってその位置取りを制御される。
本実施の形態におけるマルチリーフコリメータには、インクリメンタルエンコーダを採用していることから、本装置が起動した直後、リーフ制御装置2は各リーフの絶対位置を把握できない。そこで装置起動直後に各リーフを最大開位置まで開いて、その位置で各リーフの各リーフ絶対位置算出手段のパルス積算値を0に設定する必要がある。
この操作が原点復帰操作であり、マルチリーフコリメータの原点復帰モードでおこなう。
図8が本装置が原点復帰モードで稼働している時の、トルク算出手段14Lの処理の流れを示す図である。図3の通常モードの場合とのフローとしての差異は、通常モードではステップS144で目標位置に到達したかどうかを判定するのに対して、原点復帰モードではその処理は存在しないという点と、ステップS148でトルク超過が発生した後の処理内容である。
従って、リーフ8Lがストッパ7Lに接触すると図8のステップS148で必ずトルク超過状態を検出し、ステップS249に進む。
ステップS249では原点復帰処理として、パルス積算値12LPを0にクリアし、クリア終了を上位計算機1に通知して処理を終了する。
なお、原点復帰モードでは、現時点目標位置の算出のために使用する、速度と位置関係を表す関数は図5となる。ストッパにリーフを接触させる必要から、通常動作モードより遅い速度で安全に処理を行う必要があるためである。
通常動作モードにおいてトルク算出手段14Lが図3のステップS148、S149でリーフ動作の異常検出処理を用意していても、以下に示すような、リーフが間欠的に正常に移動する場合には、ステップS148の判定条件を満たさない場合がある。
(1)軸4Lとエンコーダ5L間が間欠的にスリップするような故障の場合。
(2)軸4Lと歯車6Lが間欠的にスリップするような故障の場合。
(3)歯車6Lやリーフ8Lに刻まれた歯の一部欠損しているような故障の場合。
(4)エンコーダ5Lとリーフ制御装置2間の外線接触不良によるパルスの欠損による位置情報不良の場合。
(5)エンコーダ5Lとリーフ制御装置2間の外線にノイズが入り、重畳したパルス挿入による位置情報不良の場合。
結果、実際にはリーフ8Lは目標とする位置に到達していないにも拘わらず、リーフ制御装置2は目標位置に到達したと判断してしまう場合がある。
通常モードのトルク算出手段14Lの処理手順を示す図3と図9との差異は、ステップS144(目標到達判定)でYESとなった後の処理であるステップS1441と、ステップS148でトルク超過を検出した後の処理である。
上位計算機1は粒子線を照射するための照射野を形成するためにリーフ制御装置2に、リーフ絶対目標位置指令40Lを与えるのであるが、安全のため、事前に診断モードでの診断処理をおこなう。
診断モードでは上位計算機1は、リーフ8Lの絶対目標位置指令を−1として指示する。リーフ目標位置変換手段13Lはリーフ8Lの現在位置からの相対目標位置(移動方向、距離)をリーフ相対目標位置13LPとして算出する。
絶対位置−1に移動するようリーフ相対目標位置13LPを与えるということは、ストッパの位置を越えた位置を目標位置として設定し、ストッパ7Lの位置より更に開方向への移動をおこなうようモータ3Lを制御することを意味する。
万一ステップS144でリーフ8Lが目標に到達したと判断されて、処理がS1441で終了した場合は、リーフ制御装置2はリーフ8Lが既に絶対位置−1に到達したと判断していることになる。正常であればリーフはストッパに接触し、目標に到達することは起こりえない。そこで、この場合は、ステップS1441で上位計算機1に異常発生を通知して処理を終了する。
この場合、上記(2)(3)(5)の異常発生が考えられる。
上記(1)(4)の異常の場合及び、装置が正常に動作している場合は、最後に必ずステップS148からS152に進む。ステップS152で、リーフ絶対位置算出手段12Lのパルス積算値12LPの値が0近傍の許容誤差の範囲であればステップS152の条件を満足し、ステップS154へ進んで上位計算機1に診断OKを通知して診断処理を終了する。条件を満足しない場合はステップS153へ進み上位計算機1に異常を通知して処理を終了する。
なお、診断モードで「現時点目標位置」の設定のために使用するグラフは図5となる。これにより、通常動作モードより遅い速度で安全に診断処理をおこなえる。
実施の形態1では、リーフ制御装置2は図3のステップS147において、リーフの移動速度が図4に示す速度を超えないようにモータのトルクを算出していた。つまり、計算速度がグラフの値を超える場合は、図4によって求められるリーフの移動開始後の経過時間に対応する速度をリーフの上限速度としていた。
実施の形態2におけるトルク算出手段14Lには、位置と時間の関係を算出する機能を設けてある。上位計算機1よりリーフ絶対目標位置指令40Lがリーフ制御装置2に指示され、リーフ目標位置変換手段13Lでリーフ相対目標位置13LPが算出されると、リーフ相対目標位置までの距離から逆算して、図6のグラフからリーフ8Lが、ある時間にx1に取るべき位置y1を求めることができる。これにより、計算上の理想位置と実際の位置の乖離が発生している場合は、リアルタイムにこれを検出することができる。
ステップS1481において、パルス積算値12LPの示す現在のリーフ位置が、図6から求められる移動開始後経過時間x1に対応する予想位置y1近傍であるかどうかを判定する。この判定条件を満足する場合、ステップS150を実行する。判定条件を満足しない場合、ステップS1482に進む。
リーフ8Lの位置が予想位置近傍に無い場合は故障が考えられる。この場合は、上位計算機1に異常発生を通知して処理を終了する。
実施の形態3のマルチリーフコリメータは図1に示す実施の形態1で説明したマルチリーフコリメータとハードウェア構成は同一である。違いは、この実施の形態3では、診断モード時に、実施の形態1における開方向の診断モードに加えて、閉方向の診断モードを追加している点である。
この違いを、この実施の形態3で使用するトルク算出手段の処理のフロー図である図11に基づいて説明する。
閉方向診断モードについて説明する。
実施の形態1での例と同様にストッパ7L、7R間の中間点にリーフの先端がある場合のパルス積算値12LP、12LRが示す値は、装置が正常に動作している場合はそれぞれ5000であるとする。
説明を簡単にするために、ここでは先の例の続きとして、1枚のリーフが移動できる最大値10000を両リーフの目標位置として与えるとする。
この場合は、例え現在の各リーフの位置が何処にあっても、万一、一方のリーフが故障でまったく動かない場合でも、2枚のリーフは衝突することになる。両リーフが衝突した時、それぞれのリーフのパルス積算値12LP、12RPを合計した値が1枚のリーフとして移動できる最大値10000近傍であれば、2枚分のパルス積算値の合計は正常値を示していることになる。
つまり、2枚のリーフ8L、8Rがどこで接触していても、両リーフが正常に動作している状態ではパルス積算値12LP、12RPの合計は10000となる。例えばリーフ8Lが絶対位置1000の位置にある状態で両リーフが閉じている場合、リーフ絶対位置算出手段12Rのパルス積算値は9000となる。両リーフがそれぞれのストッパからの中間点で閉じているときは、12L、12Rのパルス積算値は共に5000であるから合計はやはり10000である。
同時に、高速でのリーフ同士の衝突によってリーフが破損することを防止するためでもある。
例えば、ギア6Rが割れて脱落した状態で両リーフがストッパ7L、7Rに接触する位置にあるとする。
この場合、図2のリーフ絶対位置算出手段12Lのパルス積算値は正常であれば0である。ここで閉方向の診断を開始すると、リーフ8Lは中間点+1の5001まで進んで停止する。目標位置に到達したからである。本来両リーフは接触してステップS148でトルク超過を検出するはずであるのにトルク超過が発生しないで終了したということは異常の発生と判断できる。したがってステップS1441で上位計算機1に異常を通知して終了する。
この場合は、パルス積算値12LPと12RPの値を積算してその値が10000近傍であるか否かを確認する。
万一誤差が所定の範囲外の場合はリーフまたは周辺器機に異常が発生していると考えられるのでステップS354へ進んで上位計算機1に異常を通知して終了する。
パルス積算値12LP、12RPの合計が10000とほぼ等しければ正常である。この場合は診断OKとして上位計算機1に通知して処理を終了する。
なお、運用中にパルス積算値が負の数になることは通常起こりえない。その場合のエラー処理は当然行うがここでの説明は省略する。
以上のように両リーフの絶対位置算出手段12L、12Rのパルス積算値12LP、12RPの和とその和が設計上取るべき値の比較をおこなうことで、開方向だけでなく、閉方向の診断をおこなうことができる。
実施の形態4は、実施の形態1乃至実施の形態3で使用したリーフ駆動装置30に、異常発生時に備え、一部の部品を二重化して装着し、リーフ駆動装置130としたものである。
図12はこの実施の形態におけるマルチリーフコリメータ120の構成図。図13はリーフ制御装置102のブロック図である。モータ3Lに対しては、二重化されたエンコーダ5Lと51Lが接続され、モータ3Rに二重化されたエンコーダ5Rと51Rが接続されている。エンコーダ5Lが発生させるパルス11L用のリーフ絶対位置算出手段12Lに加え、エンコーダ51Lが発生させるパルス111L用のリーフ絶対位置算出手段112Lが追加されている。また、リーフ絶対位置算出手段12Lとリーフ絶対位置算出手段112Lが保持する2つのパルス積算値12LPと112LPを比較する比較回路18Lを備えている。2つのパルス積算値の値に所定の範囲以上の差が発生した場合は、いずれかのエンコーダの異常として処理を中止し、診断モードをおこなうことにより、故障しているエンコーダを素早く特定できる。
実施の形態5は、実施の形態1乃至実施の形態3で使用したリーフ駆動装置30に、異常発生時に備え、一部の部品を三重化して装着し、リーフ駆動装置230としたものである。
図14はこの実施の形態におけるマルチリーフコリメータ220の構成図。図15はリーフ制御装置202のブロック図である。モータ3Lには、三重化されたエンコーダ5L、51L、52Lが接続され、モータ3Rには三重化されたエンコーダ5R、51R、52Rが接続されている。エンコーダ5Lが発生させるパルス11L用のリーフ絶対位置算出手段12Lに加え、エンコーダ51L、52Lが発生させるパルス111L、211L用のリーフ絶対位置算出手段112L、212Lが追加されている。また、3つのリーフ絶対位置算出手段が保持する3つのパルス積算値12LP、112LP、212LPの真偽を判定する多数決判定手段19Lを備えている。
4L,4R 軸、5L,51L,52L,5R,51R,52R エンコーダ、
6L,6R 歯車、7L,7R ストッパ、8L,8R リーフ、9 照射野、
10L,10R リーフ制御ブロック、
11L,11R,111L,111R,211L,211R パルス、
12L,112L,212L リーフ絶対位置算出手段、
12LP,12RP パルス積算値、13L リーフ目標位置変換手段、
13LP リーフ相対目標位置、14L トルク算出手段、
15L トルク/電流変換手段、16L,16R 電流、18L 比較回路、
19L 多数決判定手段、20,120,220 マルチリーフコリメータ、
30,130,230 リーフ駆動装置、40L,40R リーフ絶対目標位置指令。
Claims (5)
- 粒子線を照射する照射野形状を形成するために正対して開閉する2枚のリーフと、
それぞれのリーフを独立して移動させるモータと、
前記モータの回転数を検出するエンコーダと、
前記それぞれのリーフの移動を全開位置に規制するストッパとを接続してなるリーフ駆動装置を複数並列したリーフ駆動装置群及び、
前記エンコーダが発生させるパルスから前記リーフの絶対位置を算出するリーフ絶対位置算出手段と、
前記リーフの前記絶対位置とリーフが移動すべき位置を指令するリーフ絶対目標位置指令から、それぞれの前記モータの出力すべきトルクを算出するトルク算出手段と、
前記トルクを前記モータに印加する電流に変換するトルク/電流変換手段とからなるリーフ制御装置
を備えた粒子線治療装置用マルチリーフコリメータにおいて、
前記リーフが前記ストッパに接触する位置を原点とし、
前記リーフを全開方向に移動し前記トルク算出手段が算出するトルク値が所定の時間継続して所定の値を超えたことにより、前記リーフが前記ストッパに接触したことを検知した時、
前記リーフ絶対位置算出手段が算出するリーフ絶対位置が前記原点から所定の範囲内に無いときは、リーフ駆動装置は異常、所定の範囲内にあるときは正常と判定することを特徴とする粒子線治療装置用マルチリーフコリメータ。 - 粒子線を照射する照射野形状を形成するための正対して開閉する2枚のリーフと、
それぞれのリーフを独立して移動させるモータと、
前記モータの回転数を検出するエンコーダと、
前記それぞれのリーフの移動を全開位置に規制するストッパとを接続してなるリーフ駆動装置を複数並列にしたリーフ駆動装置群及び、
前記リーフの現在の前記絶対位置と、
リーフが移動すべき位置を指令するリーフ絶対目標位置指令からそれぞれの前記モータの出力すべきトルクを算出するトルク算出手段と、
前記トルクを前記モータに印加する電流に変換するトルク/電流変換手段とからなるリーフ制御装置
を備えた粒子線治療装置用マルチリーフコリメータにおいて、
前記リーフが前記ストッパに接触する位置を原点とし、
前記正対する2枚のリーフを互いに閉じる方向へ移動させ、前記トルク算出手段が算出する一方又は両方のモータのトルク値が所定の時間継続して所定の値を超えたことにより前記2枚のリーフの接触を検知した時、
前記2枚のリーフに対応するリーフ絶対位置算出手段が算出する2つの絶対位置の和と、1枚のリーフの最大移動可能距離の差が、所定の範囲内に無いときは前記リーフ駆動装置は異常、所定の範囲にあるときは正常と判定することを特徴とする粒子線治療装置用マルチリーフコリメータ。 - 前記トルク算出手段は、前記リーフの加速度、等速移動速度、減速度を保持し、
前記計算機から指示された目標位置へ移動する前記リーフが、移動開始後、所定時間経過後に存在すべき予想位置を所定の周期で算出し、
前記リーフ絶対位置算出手段が算出する絶対位置と前記予想位置の差が所定の範囲を超えた場合は前記リーフ駆動装置は異常と判定する請求項1または請求項2に記載の粒子線治療装置用マルチリーフコリメータ。 - 1個の前記モータに対応して2個のエンコーダ及び2つのリーフ絶対位置算出手段を設け、それぞれの前記リーフ絶対位置算出手段から算出される2つ絶対位置を比較することにより前記リーフ駆動装置の異常を検出する請求項1乃至請求項3のいずれか1項に記載のマルチリーフコリメータ。
- 1個の前記モータに対応して3個のエンコーダ及び3つのリーフ絶対位置算出手段を設け、それぞれの前記リーフ絶対位置算出手段から算出される3つ絶対位置を比較することにより前記リーフ駆動装置の異常を検出する請求項1乃至請求項3のいずれか1項に記載のマルチリーフコリメータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008168102A JP5027067B2 (ja) | 2008-06-27 | 2008-06-27 | 粒子線治療装置用マルチリーフコリメータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008168102A JP5027067B2 (ja) | 2008-06-27 | 2008-06-27 | 粒子線治療装置用マルチリーフコリメータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010005149A true JP2010005149A (ja) | 2010-01-14 |
| JP5027067B2 JP5027067B2 (ja) | 2012-09-19 |
Family
ID=41586315
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008168102A Expired - Fee Related JP5027067B2 (ja) | 2008-06-27 | 2008-06-27 | 粒子線治療装置用マルチリーフコリメータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5027067B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011147592A (ja) * | 2010-01-21 | 2011-08-04 | Mitsubishi Electric Corp | 粒子線治療装置 |
| JP2012095846A (ja) * | 2010-11-02 | 2012-05-24 | Mitsubishi Electric Corp | エンコーダ異常検出装置 |
| CN106344061A (zh) * | 2016-08-08 | 2017-01-25 | 沈阳东软医疗系统有限公司 | 多叶光栅叶片运动位置控制装置、方法及直线加速度器 |
| CN107525530A (zh) * | 2017-08-08 | 2017-12-29 | 吉林大学 | 一种绝对式光电编码器的集成电路 |
| US11491347B2 (en) * | 2020-03-12 | 2022-11-08 | Shanghai United Imaging Healthcare Co., Ltd. | Systems and methods for driving leaves of a multi-leaf collimator |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04138447A (ja) * | 1990-09-28 | 1992-05-12 | Sharp Corp | レンズ移動装置のホームポジション検出装置 |
| JPH11216197A (ja) * | 1998-02-03 | 1999-08-10 | Mitsubishi Electric Corp | マルチリーフコリメータ及びこのマルチリーフコリメータを備えた放射線治療装置 |
| JP2003079754A (ja) * | 2001-06-28 | 2003-03-18 | Toshiba Corp | 放射線治療装置 |
| WO2005068019A1 (ja) * | 2004-01-13 | 2005-07-28 | Right Mfg, Co., Ltd. | 放射線照射野限定装置 |
| JP2007195877A (ja) * | 2006-01-30 | 2007-08-09 | Mitsubishi Electric Corp | 粒子線治療装置 |
| JP2007319496A (ja) * | 2006-06-02 | 2007-12-13 | Mitsubishi Heavy Ind Ltd | 放射線治療装置制御装置および放射線照射方法 |
-
2008
- 2008-06-27 JP JP2008168102A patent/JP5027067B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04138447A (ja) * | 1990-09-28 | 1992-05-12 | Sharp Corp | レンズ移動装置のホームポジション検出装置 |
| JPH11216197A (ja) * | 1998-02-03 | 1999-08-10 | Mitsubishi Electric Corp | マルチリーフコリメータ及びこのマルチリーフコリメータを備えた放射線治療装置 |
| JP2003079754A (ja) * | 2001-06-28 | 2003-03-18 | Toshiba Corp | 放射線治療装置 |
| WO2005068019A1 (ja) * | 2004-01-13 | 2005-07-28 | Right Mfg, Co., Ltd. | 放射線照射野限定装置 |
| JP2007195877A (ja) * | 2006-01-30 | 2007-08-09 | Mitsubishi Electric Corp | 粒子線治療装置 |
| JP2007319496A (ja) * | 2006-06-02 | 2007-12-13 | Mitsubishi Heavy Ind Ltd | 放射線治療装置制御装置および放射線照射方法 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011147592A (ja) * | 2010-01-21 | 2011-08-04 | Mitsubishi Electric Corp | 粒子線治療装置 |
| JP2012095846A (ja) * | 2010-11-02 | 2012-05-24 | Mitsubishi Electric Corp | エンコーダ異常検出装置 |
| CN106344061A (zh) * | 2016-08-08 | 2017-01-25 | 沈阳东软医疗系统有限公司 | 多叶光栅叶片运动位置控制装置、方法及直线加速度器 |
| US10646189B2 (en) | 2016-08-08 | 2020-05-12 | Shanghai Neusoft Medical Technology Co., Ltd. | Controlling motion position of multi-leaf collimator |
| CN107525530A (zh) * | 2017-08-08 | 2017-12-29 | 吉林大学 | 一种绝对式光电编码器的集成电路 |
| US11491347B2 (en) * | 2020-03-12 | 2022-11-08 | Shanghai United Imaging Healthcare Co., Ltd. | Systems and methods for driving leaves of a multi-leaf collimator |
| US12036425B2 (en) | 2020-03-12 | 2024-07-16 | Shanghai United Imaging Healthcare Co., Ltd. | Systems and methods for driving leaves of a multi-leaf collimator |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5027067B2 (ja) | 2012-09-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5027067B2 (ja) | 粒子線治療装置用マルチリーフコリメータ | |
| US11241792B2 (en) | Method and device for detecting abnormality of encoder, and robot control system | |
| US20200173814A1 (en) | Encoder abnormality detection method | |
| JP5455372B2 (ja) | 運動監視のための方法、装置および記憶媒体 | |
| CN104369190B (zh) | 用于机器人轴组制动的方法和装置 | |
| JP4884056B2 (ja) | 車両用操舵制御装置 | |
| CN111032294B (zh) | 控制器的信息发送方法以及编码器的异常检测方法 | |
| JP2009281484A (ja) | レンジ切換機構の制御装置 | |
| JP2001202102A (ja) | サーボ制御装置 | |
| JPS58139201A (ja) | サ−ボ系用異常検出装置 | |
| JPWO2005035205A1 (ja) | ロボットの制御装置 | |
| JP5602590B2 (ja) | エンコーダ異常検出装置 | |
| CN113285653A (zh) | 伺服控制装置碰撞防护系统、方法及计算机可读取介质 | |
| KR20110106279A (ko) | 매니퓰레이터 시스템을 제어하기 위한 방법 및 장치 | |
| CN108216353A (zh) | 车辆控制装置 | |
| WO2017216938A1 (ja) | サーボ制御診断システム | |
| JPH0739190A (ja) | 自動機械のブレーキ異常検出方法 | |
| JP4333380B2 (ja) | 車両操舵装置 | |
| US20220105980A1 (en) | Method for Monitoring a Steering Device | |
| JPS63286705A (ja) | ロボットの位置検出方法 | |
| JP3901142B2 (ja) | 車両操舵装置 | |
| JP2024007539A (ja) | 工作機械および工作機械を制御する方法 | |
| JP5344887B2 (ja) | エレベータのドア制御装置 | |
| JP2011107961A (ja) | 位置制御装置 | |
| JP2009214849A (ja) | 操舵反力生成制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091203 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120322 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120327 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120523 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120612 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120621 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150629 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |