JP2010002636A - 光走査装置 - Google Patents
光走査装置 Download PDFInfo
- Publication number
- JP2010002636A JP2010002636A JP2008160943A JP2008160943A JP2010002636A JP 2010002636 A JP2010002636 A JP 2010002636A JP 2008160943 A JP2008160943 A JP 2008160943A JP 2008160943 A JP2008160943 A JP 2008160943A JP 2010002636 A JP2010002636 A JP 2010002636A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- swinging
- swing
- light
- torsion spring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Mechanical Optical Scanning Systems (AREA)
Abstract
【解決手段】基板と、前記基板に板波振動を励起する駆動手段と、前記基板に連結された捩りばね部材と、前記捩りばね部材に連結され、前記基板の板波振動により励起される前記捩りばね部材の捩れ振動により、前記捩りばね部材を揺動中心軸として揺動する揺動部材と、前記揺動部材に形成された光反射面と、前記光反射面に光を投射する光源と、前記光反射面で反射された反射光を受光する受光手段と、前記受光手段の受光結果に基づいて、前記揺動部材の揺動態様が目的とする揺動態様となるように、前記駆動手段の駆動条件を補正する補正手段と、を備えたことを特徴とする。
【選択図】図1
Description
図1は本発明の第1実施形態に係る光走査装置Aのブロック図である。光走査装置Aは走査ユニット100と、制御ユニット200と、駆動回路210と、テスト用光源220と、受光器230と、を備える。まず、走査ユニット100の構成について説明する。図2は走査ユニット100の斜視図、図3は走査ユニット100の動作説明図である。
f=2π√(k/I)
で表される。共振周波数は、揺動部材20の慣性モーメントIや捩りばね部材30のばね定数kに大きく依存しており、これらは部材の物性のみならず、形状にも大きく依存する。
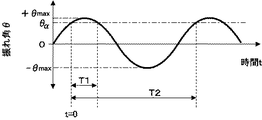
θ=θmax・sinω(t+(T2/4−T1/2))
ω=2π/T2
と表せる。そして、
t=0、θ=θα(又は、t=T1、θ=θα)
であるから、θmaxを演算できる。
本実施形態では、周囲温度の変化に起因する揺動部材20の揺動態様の変化を自動較正するものである。図7は本発明の第2実施形態に係る光走査装置Bのブロック図である。上記第1実施形態の光走査装置Aと同様の構成については同じ符号を付して説明を割愛し、異なる構成についてのみ説明する。
次に、走査ユニット100の他の実施形態について説明する。本実施形態では、基板10又は揺動部材20の少なくともいずれか一方に、トリミング用の突出片部を設ける。そして、製造誤差は、突出片部をトリミングすることにより較正する。
本発明の光走査装置は、例えば、レーザビームプリンタ等の画像形成装置、ヘッドマウントディスプレイ等の画像表示装置、バーコードリーダ等の入力装置等の各種装置に適用可能である。また、本発明の光走査装置により2次元スキャナを構成した平板ディスプレイや、読取センサに対する原稿走査用光スキャナへの応用も可能である。その場合、上記第1及び第2実施形態の制御ユニット200は、適用先の装置の制御ユニットで兼用してもよい。
10 基板
20 揺動部材
21 光反射面
30 捩りばね部材
100 走査ユニット
Claims (9)
- 基板と、
前記基板に板波振動を励起する駆動手段と、
前記基板に連結された捩りばね部材と、
前記捩りばね部材に連結され、前記基板の板波振動により励起される前記捩りばね部材の捩れ振動により、前記捩りばね部材を揺動中心軸として揺動する揺動部材と、
前記揺動部材に形成された光反射面と、
前記光反射面に光を投射する光源と、
前記光反射面で反射された反射光を受光する受光手段と、
前記受光手段の受光結果に基づいて、前記揺動部材の揺動態様が目的とする揺動態様となるように、前記駆動手段の駆動条件を補正する補正手段と、
を備えたことを特徴とする光走査装置。 - 前記受光手段は、
前記揺動部材が予め定めた振れ角に位置したときに前記反射光を受光する位置に配置され、
前記補正手段は、
前記受光手段による前記反射光の受光間隔に基づいて前記駆動条件を補正することを特徴とする請求項1に記載の光走査装置。 - 前記揺動態様が、前記揺動部材の最大振れ角であることを特徴とする請求項1又は2に記載の光走査装置。
- 基板と、
前記基板に板波振動を励起する駆動手段と、
前記基板に連結された捩りばね部材と、
前記捩りばね部材に連結され、前記基板の板波振動により励起される前記捩りばね部材の捩れ振動により、前記捩りばね部材を揺動中心軸として揺動する揺動部材と、
前記揺動部材に形成された光反射面と、
周囲温度を検出する温度検出手段と、
複数の周囲温度について、前記揺動部材の揺動態様を目的とする揺動態様とするための前記駆動手段の駆動条件に関するデータを記憶した記憶手段と、
前記温度検出手段の検出結果と、前記記憶手段に記憶した前記データとに基づいて、前記駆動手段の駆動条件を設定する設定手段と、
を備えたことを特徴とする光走査装置。 - 前記駆動手段が圧電体であり、
前記駆動条件が、前記圧電体の駆動電圧を少なくとも含むことを特徴とする請求項1乃至4のいずれか1項に記載の光走査装置。 - 前記駆動手段が圧電体であり、
前記駆動条件が、前記圧電体の駆動周波数を少なくとも含むことを特徴とする請求項1乃至5のいずれか1項に記載の光走査装置。 - 前記基板又は前記揺動部材の少なくともいずれか一方が、トリミング用の突出片部を有することを特徴とする請求項1乃至6のいずれか1項に記載の光走査装置。
- 前記揺動部材が、トリミング用の突出片部を有し、
前記光反射面は、前記突出片部には形成されていないことを特徴とする請求項1乃至6のいずれか1項に記載の光走査装置。 - 前記基板、前記捩りばね部材及び前記揺動部材が、一枚の板材から一体に形成されていることを特徴とする請求項1乃至8のいずれか1項に記載の光走査装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008160943A JP5296423B2 (ja) | 2008-06-19 | 2008-06-19 | 光走査装置、画像形成装置、表示装置及び入力装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008160943A JP5296423B2 (ja) | 2008-06-19 | 2008-06-19 | 光走査装置、画像形成装置、表示装置及び入力装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010002636A true JP2010002636A (ja) | 2010-01-07 |
| JP5296423B2 JP5296423B2 (ja) | 2013-09-25 |
Family
ID=41584421
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008160943A Active JP5296423B2 (ja) | 2008-06-19 | 2008-06-19 | 光走査装置、画像形成装置、表示装置及び入力装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5296423B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011209362A (ja) * | 2010-03-29 | 2011-10-20 | Brother Industries Ltd | 圧電アクチュエータ、光スキャナ、光走査型画像表示装置、画像形成装置 |
| WO2012020788A1 (ja) * | 2010-08-11 | 2012-02-16 | シナノケンシ株式会社 | 光走査装置 |
| JP2014063152A (ja) * | 2012-08-27 | 2014-04-10 | Canon Electronics Inc | 揺動素子、アクチュエータ装置、光走査装置、並びに金属薄膜体及び光走査装置の製造方法 |
| JP2016197144A (ja) * | 2015-04-02 | 2016-11-24 | 日本信号株式会社 | 光走査アクチュエータの評価装置 |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0749462A (ja) * | 1993-08-04 | 1995-02-21 | Nikon Corp | 共振スキャナ |
| JPH07181415A (ja) * | 1993-12-22 | 1995-07-21 | Omron Corp | 光走査装置 |
| JPH08240782A (ja) * | 1995-03-02 | 1996-09-17 | Omron Corp | 光スキャナ、光センサ装置及び符号情報読み取り装置並びに符号情報読み取り方法 |
| JPH09101474A (ja) * | 1995-10-06 | 1997-04-15 | Denso Corp | 光スキャナ装置 |
| JP2003084226A (ja) * | 2001-09-14 | 2003-03-19 | Ricoh Co Ltd | 光走査装置 |
| JP2003215493A (ja) * | 2002-01-28 | 2003-07-30 | Nippon Signal Co Ltd:The | 光走査装置 |
| JP2006178408A (ja) * | 2004-11-25 | 2006-07-06 | Ricoh Co Ltd | スキャナ素子、光走査装置および画像形成装置 |
| JP2006230048A (ja) * | 2005-02-15 | 2006-08-31 | Seiko Epson Corp | アクチュエータの共振周波数の調整方法およびアクチュエータ |
| WO2008041585A1 (fr) * | 2006-09-27 | 2008-04-10 | National Institute Of Advanced Industrial Science And Technology | Dispositif de balayage optique |
| WO2008044470A1 (en) * | 2006-10-12 | 2008-04-17 | National Institute Of Advanced Industrial Science And Technology | Optical scanning device |
| JP2009175513A (ja) * | 2008-01-25 | 2009-08-06 | Panasonic Corp | 振動ミラーおよびレーザスキャニングユニット |
| JP2010002454A (ja) * | 2008-06-18 | 2010-01-07 | Panasonic Corp | 光走査装置 |
| JP2010002455A (ja) * | 2008-06-18 | 2010-01-07 | Panasonic Corp | 光走査装置 |
-
2008
- 2008-06-19 JP JP2008160943A patent/JP5296423B2/ja active Active
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0749462A (ja) * | 1993-08-04 | 1995-02-21 | Nikon Corp | 共振スキャナ |
| JPH07181415A (ja) * | 1993-12-22 | 1995-07-21 | Omron Corp | 光走査装置 |
| JPH08240782A (ja) * | 1995-03-02 | 1996-09-17 | Omron Corp | 光スキャナ、光センサ装置及び符号情報読み取り装置並びに符号情報読み取り方法 |
| JPH09101474A (ja) * | 1995-10-06 | 1997-04-15 | Denso Corp | 光スキャナ装置 |
| JP2003084226A (ja) * | 2001-09-14 | 2003-03-19 | Ricoh Co Ltd | 光走査装置 |
| JP2003215493A (ja) * | 2002-01-28 | 2003-07-30 | Nippon Signal Co Ltd:The | 光走査装置 |
| JP2006178408A (ja) * | 2004-11-25 | 2006-07-06 | Ricoh Co Ltd | スキャナ素子、光走査装置および画像形成装置 |
| JP2006230048A (ja) * | 2005-02-15 | 2006-08-31 | Seiko Epson Corp | アクチュエータの共振周波数の調整方法およびアクチュエータ |
| WO2008041585A1 (fr) * | 2006-09-27 | 2008-04-10 | National Institute Of Advanced Industrial Science And Technology | Dispositif de balayage optique |
| WO2008044470A1 (en) * | 2006-10-12 | 2008-04-17 | National Institute Of Advanced Industrial Science And Technology | Optical scanning device |
| JP2009175513A (ja) * | 2008-01-25 | 2009-08-06 | Panasonic Corp | 振動ミラーおよびレーザスキャニングユニット |
| JP2010002454A (ja) * | 2008-06-18 | 2010-01-07 | Panasonic Corp | 光走査装置 |
| JP2010002455A (ja) * | 2008-06-18 | 2010-01-07 | Panasonic Corp | 光走査装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011209362A (ja) * | 2010-03-29 | 2011-10-20 | Brother Industries Ltd | 圧電アクチュエータ、光スキャナ、光走査型画像表示装置、画像形成装置 |
| WO2012020788A1 (ja) * | 2010-08-11 | 2012-02-16 | シナノケンシ株式会社 | 光走査装置 |
| JP2014063152A (ja) * | 2012-08-27 | 2014-04-10 | Canon Electronics Inc | 揺動素子、アクチュエータ装置、光走査装置、並びに金属薄膜体及び光走査装置の製造方法 |
| JP2016197144A (ja) * | 2015-04-02 | 2016-11-24 | 日本信号株式会社 | 光走査アクチュエータの評価装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5296423B2 (ja) | 2013-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7659918B2 (en) | Apparatus and methods for adjusting the rotational frequency of a scanning device | |
| US8422109B2 (en) | Optical reflection element | |
| US7355774B2 (en) | Optical deflector and optical apparatus using the same | |
| US7557972B2 (en) | Oscillator device, optical deflector and optical instrument using the same | |
| JP2011180322A (ja) | 光スキャナ、光スキャナ制御方法、及び光スキャナを用いた画像表示装置。 | |
| JP5296423B2 (ja) | 光走査装置、画像形成装置、表示装置及び入力装置 | |
| JP2011150055A (ja) | 光偏向器及びこれを用いた光学装置 | |
| CN101551518B (zh) | 可移动体设备和使用该可移动体设备的光偏转器 | |
| JP2015070214A (ja) | 光学装置、投影光学系、露光装置および物品の製造方法 | |
| JP2012058527A (ja) | 光偏向器、光走査装置、画像形成装置及び画像投影装置 | |
| JP2012198298A (ja) | 光偏向装置並びにこれを備えた光走査装置、画像投影装置、画像読取装置および画像形成装置 | |
| JP2008145839A (ja) | 光スキャナ装置 | |
| US8520282B2 (en) | Optical scanning apparatus configured to deflect and scan laser beam by using MEMS mirror | |
| JP5296424B2 (ja) | 光走査装置、画像形成装置、表示装置及び入力装置 | |
| US8081366B2 (en) | Oscillating device, light deflector, and image forming apparatus using the same | |
| JP5716992B2 (ja) | 光偏向装置、光走査装置、画像形成装置及び画像投影装置 | |
| JP2016114715A (ja) | 振動素子、光走査装置、画像形成装置、画像投影装置および画像読み取り装置 | |
| JP2007078722A (ja) | 光走査装置 | |
| JP7356275B2 (ja) | 測定システムおよび測定方法 | |
| JP2006081320A (ja) | アクチュエータ | |
| JP2010014871A (ja) | 揺動体装置、光偏向装置、光学機器、及び共振周波数検出方法 | |
| JP6231361B2 (ja) | 振動素子および光走査装置 | |
| JP5451047B2 (ja) | 光学走査装置 | |
| JP2006075944A (ja) | アクチュエータ | |
| WO2022163076A1 (ja) | アクチュエータデバイスの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110609 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120525 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120723 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130524 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130613 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5296423 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |