JP2009545919A - ビデオ復号処理のためにアダブティブなジオメトリック分割を行う方法および装置 - Google Patents
ビデオ復号処理のためにアダブティブなジオメトリック分割を行う方法および装置 Download PDFInfo
- Publication number
- JP2009545919A JP2009545919A JP2009522842A JP2009522842A JP2009545919A JP 2009545919 A JP2009545919 A JP 2009545919A JP 2009522842 A JP2009522842 A JP 2009522842A JP 2009522842 A JP2009522842 A JP 2009522842A JP 2009545919 A JP2009545919 A JP 2009545919A
- Authority
- JP
- Japan
- Prior art keywords
- parametric model
- partition
- curve
- block
- model
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


























Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/57—Motion estimation characterised by a search window with variable size or shape
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/119—Adaptive subdivision aspects, e.g. subdivision of a picture into rectangular or non-rectangular coding blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/117—Filters, e.g. for pre-processing or post-processing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/124—Quantisation
- H04N19/126—Details of normalisation or weighting functions, e.g. normalisation matrices or variable uniform quantisers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/13—Adaptive entropy coding, e.g. adaptive variable length coding [AVLC] or context adaptive binary arithmetic coding [CABAC]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/146—Data rate or code amount at the encoder output
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/156—Availability of hardware or computational resources, e.g. encoding based on power-saving criteria
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
- H04N19/159—Prediction type, e.g. intra-frame, inter-frame or bidirectional frame prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/189—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the adaptation method, adaptation tool or adaptation type used for the adaptive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/44—Decoders specially adapted therefor, e.g. video decoders which are asymmetric with respect to the encoder
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/507—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction using conditional replenishment
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/537—Motion estimation other than block-based
- H04N19/543—Motion estimation other than block-based using regions
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/70—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by syntax aspects related to video coding, e.g. related to compression standards
Abstract
Description

各パーティションの離散的な性質を考慮すると、分離ラインまたは曲線の近傍上で、画素の中には、一方、または、他方のパーティションに部分的に属するとみなされるだけのものがある。これは、パラメトリック・モデルの定式化が連続的であり、各パーティションの実現が離散的であるという事実によるものである。
復号器が対象のブロックまたは領域のパーティションを決定できるようにするためにモデル・パラメータの符号化および送信が必要である。このため、パーティション・パラメータの精度は、ブロックまたはパーティション領域を記述するために割り当てられる符号化コストの最大の量によって制約を受ける。
次に、本発明の原理に従ったMPEG−4 AVC規格の拡張に関して実施の形態を説明する。MEPG−4 AVC規格は、符号化性能を最適化するために、ツリーベースのフレーム分割に依存している。本発明の原理に係る実施の形態に従ってMPEG−4 AVC規格を拡張することは、MPEG−4規格が依存しているツリーベースのフレーム分割に固有の制約を克服するのに役立つ。
符号化器制御
符号化器制御モジュールは、パラメトリック・モデルベースのブロック・パーティションに基づいて新たなモードを考慮するために拡張することができる。これらのモード(ジオメトリック・モードと呼ばれる)は、MPEG−4 AVC規格における既存のモードの中に挿入される。動き補償のためのインターモードの特定の場合においては、16×16および8×8のパラメトリック・モデルベースで分割されたブロックが存在する。各モデルは、それぞれ、マクロブロック・サイズのモードおよびサブマクロブロック・サイズのモード内に挿入される。構造的な類似性により、これらのモードは、ジオメトリック16×16モードでは、16×8および/または8×16の前、間、または後に論理的に挿入され、ジオメトリック8×8モードでは8×4および/または4×8の前、間、または後に挿入される。例示的な実施態様においては、低ビットレートのため、16×8、および8×16、さらに、8×4および4×8モードの低コストでの使用を可能にするために、16×16および8×8のジオメトリック・モードがMPEG−4 AVC 方向ホモローグ(directional homologues)の直後に挿入される。グローバルな使用に係る統計的データに従って、これらを表1および表2に示すように、MPEG−4 AVC方向モード(およびサブモード)の直前に挿入することもできる。
必要な場合、ジオメトリーが適応されたブロック・パーティションを取り扱うように動き推定モジュールを適応させてもよい。例として、ジオメトリック・モードにおいては、動きは、従来のツリーベースのパーティション・モード16×8、8×16、8×4、または、4×8の場合と同様に記述さる。実際、これらのモードは、本願のパラメトリック・モデルベースのパーティション・モードの何らかの特定のインスタンスのように機能することができる。従って、これらは、使用されるパラメトリック・モデルの想定される構成から除外される。各パーティションは、必要に応じて、さらに、PブロックまたはBブロックが符号化中であるかどうかにより、1つまたは複数の参照値を用いてモデル化される。
完全なPモードのパラメトリック・モデルベースで分割されたブロックにおいては、双方のパーティションが参照フレームから選択された整合パッチによってモデル化される。各パッチは、選択されたジオメトリック・パーティションに適した形状を有していなければならない。PマクロブロックおよびPサブマクロブロックの場合と同様に、動きベクトルがパーティション毎に送信される。この点についての1つの例では、何らかの歪みの尺度(D)および何らかの符号化コストの尺度(R)の観点から、ブロック内の情報が最良に記述されるように、動きベクトル、さらに、f(x,y)モデル・パラメータが選択される。この目的で、DおよびRが共に最小化されるように、各ブロックについて全てのパラメータが一緒に最適化される。
エントロピー符号化は、ジオメトリック・パラメータの統計的なデータ、さらに、近傍の復号/符号化ブロックからの予測モデルに従って、ジオメトリック・パラメータを符号化するために拡張することができ、近傍の復号/符号化ブロック自体、ジオメトリック・パーティション情報を含むことがある。パラメトリック・モデルを用いて分割されたブロックのための動きベクトル予測子は、各々の分割されたブロックのジオメトリー、さらに、近傍の、既に符号化されたブロックのジオメトリーに適応されている。各ジオメトリック・パーティション動きベクトルは、空間および/または時間的に近傍のブロックから適応的に選択された動きベクトルのセットより予測される。これについての一実施の形態は、現在のブロック・パーティションのジオメトリーに依存して、1つ、または3つの空間近傍の動きベクトルを使用することである。動きベクトルの数が3である場合、これらには、メジアン・フィルタがかけられる。次に、予測された各動きベクトルは、可変長符号化(VLC)または算術符号化に基づく符号化を使用して、MEPG−4 AVC規格に従って符号化される。
動き補償
パラメトリック・モデルベースで分割されたブロックにおける非方形/非矩形のパーティションを補償するために動き補償モジュールを拡張することができる。動き補償処理のためのブロック再構成は、本明細書においてで上述した動き推定処理に直接続くものである。実際、補償は、動きベクトルに関連付けられた2つの、パーティション形状のピクスマップ(pixmaps)と共にパーティションの最良のセットを予測子として使用することに対応する。既に定義したように、「部分面(Partial Surface)」画素は、動きベクトルに関連付けられたピクスマップの所与のルールに従った組み合わせとして算出される。
ブロックのパラメトリック・モデルベースのパーティションに従ってイントラ・データを予測するために、イントラ予測がアップグレードされる。パラメトリック・モデルベースのパーティションを用いたイントラ予測は、パラメトリック・モデルベースのパーティションを用いた動き補償および動き推定と同様に定義されるが、生成されたパーティションの各々を満たすために、代わりにイントラ予測が使用されるという基本的な違いがある。
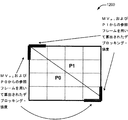
インループ・デブロッキング・フィルタは、予測のブロック構造、さらに、残差符号化離散コサイン変換(DCT)に起因するブロッキング・アーティファクトを低減する。インループ・デブロッキング・フィルタは、符号化されたビデオ・データに依存して、さらに、ブロック境界に渡った各画素間のローカル強度の差に依存して、フィルタ強度を適応させる。本発明の原理に係る実施の形態は、ビデオ・データ表現の新たな形態を導入する。パラメトリック・モデルベースのパーティションを含むブロックは、必ずしも、各4×4ブロック上で一定の動きベクトル値、または、一定の参照フレーム値を有するものではない。実際、パラメトリック・モデルベースのパーティションを用いて任意に分割されたブロックにおいては、所与の動きベクトルによる影響を受ける領域およびブロック境界は、パラメトリック・モデルによって強いられる形状によって定義される。従って、4×4ブロックは、所与の位置で使用される動きベクトルおよび使用される参照フレームに関し、これが有する全体的な影響により、半分が1つのパーティションとなり、他方の半分が別のパーティションとなるように見える。よって、フィルタ強度決定の処理を適応させることによって、インループ・デブロッキング・フィルタ・モジュールが拡張される。この処理は、ここで、内部ブロック・パーティションの特定の形状を考慮してフィルタ強度を決定することが可能となるとよい。フィルタをかけるブロック境界の部分によっては、他のMPEG−4 AVCモードによってなされるように、4×4のブロックに従うのではなく、パーティションの形状に従って、適切な動きベクトルおよび参照フレームを得る必要がある。図12を参照すると、パラメトリック・モデルベースで分割されたマクロブロックが概ね参照符号1200によって示されている。パラメトリック・モデルベースで分割されたマクロブロックは、デブロッキング・フィルタ強度決定のためにどのように情報が選択されるかを示すデブロッキング領域の幾つかの例を含む。フィルタ強度は、各4×4のブロックのデブロッキング・フィルタがかけられる側毎に一度算出される。
復号器制御モジュール
復号器制御モジュールは、パラメトリック・モデルベースのブロック分割に基づく新たなモードを考慮するために拡張される。これらのモード(ジオメトリック・モードと呼ばれる)は、復号器側で実行されるものと同様に、MPEG−4 AVC規格における既存のモードの中に挿入される。符号化器側で符号化される情報を正確に復元するために、符号化器の構造および復号処理シーケンスと完全に一致するように復号器制御モジュールが修正される。
エントロピー復号は、モデルベースのブロック分割の使用のために拡張することができる。上述したエントロピー符号化処理に従って、エントロピー復号は、上述した符号化処理に一致するように拡張される必要がある。図20、図21、および図22は、パラメトリック・モデルベースの符号化モードに関連する情報を復号するための、この点に関して想定される特定の実施の形態を示しており、ここでは、どのブロック・モードが使用されるかを示す符号語が既に復号されており、復号器制御のために利用可能である。
Claims (53)
- 少なくとも1つのパラメトリック・モデルを使用して、分割されたピクチャの少なくとも部分を再構成することによって、前記ピクチャに対応する画像データを復号する復号器(1100)を備え、
前記少なくとも1つのパラメトリック・モデルは、少なくとも1つ曲線の暗黙的な定式化および明示的な定式化のうちの少なくとも一方を含む、装置。 - 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方が、ジオメトリックな信号モデルから導出される、請求項1記載の装置。
- 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方が、1つ以上の画像輪郭および1つ以上の動き境界のうちの少なくとも一方を記述する、請求項1記載の装置。
- 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方として、少なくとも1つの多項式が使用される、請求項1記載の装置。
- 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方として、一次多項式モデルが使用される、請求項1記載の装置。
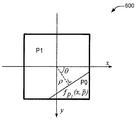
- 前記一次多項式モデルが角度パラメータおよび距離パラメータを含む、請求項5記載の装置。
- 1つを超えるパラメトリック・モデルを利用可能である場合、所与の画像部分のための前記少なくとも1つのパラメトリック・モデルが、1セットのモデルに依存して適応的に復号される、請求項1記載の装置。
- 前記復号器(1100)は、少なくとも1つのハイレベル・シンタックス要素を使用して、前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のパラメータの精度の暗黙的または明示的な復号を実行する、請求項1記載の装置。
- スライス・ヘッダ・レベル、補助拡張情報レベル、ピクチャ・パラメータ・セット・レベル、シーケンス・パラメータ・セット・レベル、およびネットワーク抽象化レイヤー・ユニット・ヘッダ・レベルのうちの少なくともから前記少なくとも1つのハイレベル・シンタックス要素が復号される、請求項8記載の装置。
- 圧縮解除効率と復号器の複雑性の少なくとも一方を制御するために、前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のパラメータの精度が適応する、請求項1記載の装置。
- 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のパラメータの精度が圧縮解除品質パラメータに依存して適応する請求項10記載の装置。
- 前記ピクチャのうちの少なくとも1つのピクチャの、少なくとも1つのパーティションで関連付けられる、予測子データが空間的に近傍のブロックおよび時間的に近傍のブロックのうちの少なくとも一方から予測される、請求項1記載の装置。
- 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のためのパーティション・モデル・パラメータが空間的に近傍のブロックおよび時間的に近傍のブロックのうちの少なくとも一方から予測される、請求項1記載の装置。
- 前記復号器(1100)は、前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方に従って、アンチエイリアス処理、画素の対応する位置についての予測値の一部の組み合わせ、前記画素の対応する位置についての予測値の合計、近傍値、前記画素が部分的に位置するとみなされる、前記1つ以上のパーティションからの、複数の異なるパーティションの各予測子、のうちの少なくとも1つを使用して、1つ以上のパーティションに部分的に存在する前記画素についての予測値を決定する、請求項1記載の装置。
- 前記復号器(1100)が、既存のビデオ符号化規格またはビデオ符号化勧告の既存のハイブリッド予測復号器の拡張バージョンである、請求項1記載の装置。
- 前記復号器(1100)が、前記マクロブロックおよび前記サブマクロブロックのうちの少なくとも一方のための符号化モードとして、前記ピクチャのマクロブロックおよびサブブロックの少なくとも一方に対してパラメトリック・モデルベースの分割を適用する、請求項15記載の装置。
- 既存のビデオ符号化規格またはビデオ符号化勧告の既存のマクロブロックおよびサブマクロブロック符号化モード内にパラメトリック・モデルベースの符号化モードが挿入される、請求項16記載の装置。
- 前記復号器(1100)は、前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のモデル・パラメータを復号し、パーティション予測データと共にパラメトリック・モデルベースのパーティションを決定する、請求項16記載の装置。
- 少なくとも2つのパラメトリック・モデルベースのパーティションに重なる前記ピクチャのうち、少なくとも1つのピクチャの各画素は、前記少なくとも2つのパラメトリック・モデルベースのパーティションの予測値および前記少なくとも2つのパラメトリック・モデルベースのパーティションの1つの前記予測値の少なくとも1つからの近傍の画素の加重線形平均である、請求項16に記載の装置。
- パーティション予測は、インターまたはイントラのタイプの少なくとも一方である、請求項16記載の装置。
- 前記復号器(1100)は、パーティション・モデル・パラメータ符号化のための前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のために、パラメータ予測値を選択的に使用する、請求項16記載の装置。
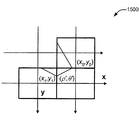
- 前記各ピクチャの特定の1つの現在のブロックのための予測値が近傍のブロックから前記現在のブロックへの曲線外挿に基づく、請求項21記載の装置。
- 前記復号器(1100)は、複数の異なるコンテキスト・テーブルまたは符号化テーブルを使用して前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のパラメータが予測されているかどうかに依存して前記画像データを復号する、請求項22記載の装置。
- 前記復号器(1100)が、ISO/IEC MEPG−4 Part 10 AVC規格/ITU−T H.264勧告のための復号器の拡張バージョンである、請求項16記載の装置。
- パラメトリック・モデルベースのパーティション・モードが使用されている場合に、前記復号器(1100)は、前記マクロブロックおよび前記サブマクロブロックのうちの前記少なくとも一方の非ツリーベースの分割による少なくとも1つのパラメトリック・モードベースのパーティションによって影響を受ける変換サイズのブロックを取り扱うように適応されたデブロッキング・フィルタリングおよび参照フレーム・フィルタリングの少なくとも一方を適用し、
前記デブロッキング・フィルタリングおよび前記参照フレーム・フィルタリングが、使用されるいずれかの1つのパラメトリック・モデルベースのパーティション、および前記少なくとも1つのパラメトリック・モデルベースのパーティションの選択された形状の少なくとも一方に依存する、請求項16記載の装置。 - 選択されたパラメトリック・モデルベースのパーティションが使用されている場合、当該選択されたパラメトリック・モデルベースのパーティションに依存して、前記復号器(1100)が逆残差変換および逆量子化処理(1150)の処理の少なくとも一方を適応させる、請求項15記載の装置。
- 少なくとも1つのパラメトリック・モデルを使用して分割されたピクチャを少なくとも部分的に再構成する(2000、2500)ことによって、前記ピクチャに対応する画像データを復号するステップを含み、
前記少なくとも1つのパラメトリック・モデルは、少なくとも1つの曲線の暗黙的な定式化および明示的な定式化のうちの少なくとも一方を含む、方法。 - 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方が、ジオメトリックな信号モデル(500、600)から導出される、請求項27記載の方法。
- 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線の少なくとも一方が、1つ以上の画像輪郭および1つ以上の動き境界(500)のうちの少なくとも一方を記述する、請求項27記載の方法。
- 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線(500)のうちの少なくとも一方として、少なくとも1つの多項式が使用される、請求項27記載の方法。
- 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線(600)のうちの少なくとも一方として、一次多項式モデルが使用される、請求項27記載の方法。
- 前記一次多項式モデルが角度パラメータおよび距離パラメータを含む(600)、請求項32記載の方法。
- 1つを超えるパラメトリック・モデルを利用可能である場合、所与の画像部分のための前記少なくとも1つのパラメトリック・モデルが1セットのモデルに依存して適応的に復号される(2200)、請求項28記載の方法。
- 前記復号ステップは、少なくとも1つのハイレベル・シンタックス要素を使用して、前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のパラメータの精度の暗黙的または明示的な復号処理を実行する(2720)、請求項28記載の方法。
- スライス・ヘッダ・レベル、補助拡張情報レベル、ピクチャ・パラメータ・セット・レベル、シーケンス・パラメータ・セット・レベル、およびネットワーク抽象化レイヤー・ユニット・ヘッダ・レベルのうちの少なくとも1つに前記少なくとも1つのハイレベル・シンタックス要素から復号される、請求項34記載の方法。
- 圧縮解除効率と復号器の複雑性の少なくとも一方を制御するために、前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のパラメータの精度が適応する、請求項27記載の方法。
- 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のパラメータの精度が圧縮解除品質パラメータに依存して適応する(2410、2415)、請求項36記載の方法。
- 前記ピクチャのうちの少なくとも1つのピクチャの、少なくとも1つのパーティションに関連付けられる、予測子データが空間的に近傍のブロックおよび時間的に近傍のブロックのうちの少なくとも一方から予測される(2118、2168)、請求項27記載の方法。
- 前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のためのパーティション・モデル・パラメータが空間的に近傍のブロックおよび時間的に近傍のブロックのうちの少なくとも一方から予測される(2116、2166)、請求項27記載の装置。
- 前記復号ステップは、前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方に従って、アンチエイリアス処理(700)、画素の対応する位置についての予測値の一部の組み合わせ、前記画素の対応する位置についての予測値の合計、近傍値、前記画素が部分的に位置するとみなされる、前記1つ以上のパーティションからの、複数の異なるパーティションの各予測子、のうち少なくとも1つを使用して、1つ以上のパーティションに部分的に存在する画素の予測値を決定する(2520)、請求項27記載の方法。
- 前記復号ステップが、既存のビデオ符号化規格またはビデオ符号化勧告の既存のハイブリッド予測復号器の拡張バージョンにおいて実行される、請求項27記載の方法。
- 前記復号ステップが、前記マクロブロックおよび前記サブマクロブロックのうちの少なくとも一方のための符号化モードとして、前記ピクチャのマクロブロックおよびサブブロックの少なくとも一方に対してパラメトリック・モデルベースの分割を適用する(2625)、請求項41記載の方法。
- 既存のビデオ符号化規格またはビデオ符号化勧告の既存のマクロブロックおよびサブマクロブロック符号化モード内にパラメトリック・モデルベースの符号化モードが挿入される、請求項42記載の方法。
- 前記復号ステップは、前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のモデル・パラメータを復号し、パーティション予測データと共にパラメトリック・モデルベースのパーティションを決定する(2000)、請求項42記載の方法。
- 少なくとも2つのパラメトリック・モデルベースのパーティションに重なる前記ピクチャの少なくとも1つのピクチャの画素は、前記少なくとも2つのパラメトリック・モデルベースのパーティションの予測値のおよび前記少なくとも2つのパラメトリック・モデルベースの前記予測値の少なくとも1つからの近傍の画素の加重線形平均である、請求項42に記載の方法。
- パーティション予測は、インター(2100)またはイントラ(2150)のタイプの少なくとも一方である、請求項42記載の方法。
- 前記復号ステップは、パーティション・モデル・パラメータ符号化のための前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のために、パラメータ予測値を選択的に使用する(2100、2150)、請求項43記載の方法。
- 前記各ピクチャの特定の1つの現在のブロックのための予測値が近傍のブロックから前記現在のブロックへの曲線外挿に基づく(1300、1400、1500)、請求項47記載の方法。
- 前記復号ステップは、複数の異なるコンテキスト・テーブルまたは符号化テーブルを使用して前記少なくとも1つのパラメトリック・モデルおよび前記少なくとも1つの曲線のうちの少なくとも一方のパラメータが予測されているかどうかに依存して前記画像データを復号する(1808、1858)、請求項47記載の方法。
- 前記復号ステップは、ISO/IEC MEPG−4(Moving Picture Experts Group−4) Part 10 AVC規格/ITU−T H.264勧告のための復号器の拡張バージョンにおいて実行される、請求項42記載の方法。
- パラメトリック・モデルベースのパーティション・モードが使用されている場合に、前記復号ステップは、前記マクロブロックおよび前記サブマクロブロックのうちの前記少なくとも一方の非ツリーベースの分割による少なくとも1つのパラメトリック・モデルベースのパーティションによって影響を受ける変換サイズのブロックを取り扱うように適応されたデブロッキング・フィルタリングおよび参照フレーム・フィルタリングの少なくとも一方を適用し、
前記デブロッキング・フィルタリングおよび前記参照フレーム・フィルタリングが、使用されるいずれかの1つのパラメトリック・モデルベースのパーティション、および前記少なくとも1つのパラメトリック・モデルベースのパーティションの選択された形状の少なくとも一方に依存する、請求項43記載の装置。 - 選択されたパラメトリック・モデルベースのパーティションが使用されている場合、当該選択されたパラメトリック・モデルベースのパーティションに依存して逆残差変換および逆量子化処理(1150)の処理の少なくとも一方を適応させる、請求項38に記載の方法。
- 符号化されたビデオ信号データを有する記憶媒体であって、
少なくとも1つのパラメトリック・モデルに応じて、ピクチャを少なくとも部分的に適応的に分割することによって符号化される前記ピクチャに対応する画像データを含み、
前記少なくとも1つのパラメトリック・モデルは、少なくとも1つの曲線の暗黙的な定式化および明示的な定式化の少なくとも一方を含む、前記記憶媒体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US83499306P | 2006-08-02 | 2006-08-02 | |
| PCT/US2007/017114 WO2008016605A2 (en) | 2006-08-02 | 2007-07-31 | Adaptive geometric partitioning for video decoding |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013228049A Division JP2014060764A (ja) | 2006-08-02 | 2013-11-01 | ビデオ復号処理のためにアダブティブなジオメトリック分割を行う方法および装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009545919A true JP2009545919A (ja) | 2009-12-24 |
| JP2009545919A5 JP2009545919A5 (ja) | 2010-09-16 |
Family
ID=38997679
Family Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009522843A Pending JP2009545920A (ja) | 2006-08-02 | 2007-07-31 | ビデオ符号化処理のためにアダブティブなジオメトリック分割を行う方法および装置 |
| JP2009522842A Pending JP2009545919A (ja) | 2006-08-02 | 2007-07-31 | ビデオ復号処理のためにアダブティブなジオメトリック分割を行う方法および装置 |
| JP2013228029A Active JP6109712B2 (ja) | 2006-08-02 | 2013-11-01 | ビデオ符号化処理のためにアダブティブなジオメトリック分割を行う方法および装置 |
| JP2013228049A Pending JP2014060764A (ja) | 2006-08-02 | 2013-11-01 | ビデオ復号処理のためにアダブティブなジオメトリック分割を行う方法および装置 |
| JP2015074756A Pending JP2015144487A (ja) | 2006-08-02 | 2015-04-01 | ビデオ復号処理のためにアダブティブなジオメトリック分割を行う方法および装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009522843A Pending JP2009545920A (ja) | 2006-08-02 | 2007-07-31 | ビデオ符号化処理のためにアダブティブなジオメトリック分割を行う方法および装置 |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013228029A Active JP6109712B2 (ja) | 2006-08-02 | 2013-11-01 | ビデオ符号化処理のためにアダブティブなジオメトリック分割を行う方法および装置 |
| JP2013228049A Pending JP2014060764A (ja) | 2006-08-02 | 2013-11-01 | ビデオ復号処理のためにアダブティブなジオメトリック分割を行う方法および装置 |
| JP2015074756A Pending JP2015144487A (ja) | 2006-08-02 | 2015-04-01 | ビデオ復号処理のためにアダブティブなジオメトリック分割を行う方法および装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (6) | US20120177106A1 (ja) |
| EP (2) | EP2050279B1 (ja) |
| JP (5) | JP2009545920A (ja) |
| KR (2) | KR101526914B1 (ja) |
| CN (2) | CN101502120B (ja) |
| BR (2) | BRPI0714859A2 (ja) |
| WO (2) | WO2008016605A2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010508706A (ja) * | 2006-10-30 | 2010-03-18 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー. | ビデオシーケンスフレームを分解する方法 |
| JP2010524396A (ja) * | 2007-04-12 | 2010-07-15 | トムソン ライセンシング | ビデオエンコーダにおける高速な幾何学的なモードの判定方法及び装置 |
| JP2013537764A (ja) * | 2010-08-19 | 2013-10-03 | トムソン ライセンシング | 画像の現在のブロックを再構築する方法および対応する符号化方法、対応する符号化装置、さらに、ビットストリームに符号化された画像を保持する記憶媒体 |
| JP2022523309A (ja) * | 2019-01-28 | 2022-04-22 | オーピー ソリューションズ, エルエルシー | 指数関数的分割におけるインター予測 |
Families Citing this family (166)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2050279B1 (en) | 2006-08-02 | 2018-08-29 | Thomson Licensing | Adaptive geometric partitioning for video decoding |
| MX2009003333A (es) * | 2006-09-29 | 2009-05-12 | Thomson Licensing | Intra prediccion geometrica. |
| KR101365570B1 (ko) * | 2007-01-18 | 2014-02-21 | 삼성전자주식회사 | 인트라 예측 부호화, 복호화 방법 및 장치 |
| KR101366093B1 (ko) * | 2007-03-28 | 2014-02-21 | 삼성전자주식회사 | 영상의 부호화, 복호화 방법 및 장치 |
| US8160150B2 (en) * | 2007-04-10 | 2012-04-17 | Texas Instruments Incorporated | Method and system for rate distortion optimization |
| KR20080107965A (ko) * | 2007-06-08 | 2008-12-11 | 삼성전자주식회사 | 객체 경계 기반 파티션을 이용한 영상의 부호화, 복호화방법 및 장치 |
| KR101408698B1 (ko) * | 2007-07-31 | 2014-06-18 | 삼성전자주식회사 | 가중치 예측을 이용한 영상 부호화, 복호화 방법 및 장치 |
| BRPI0818344A2 (pt) * | 2007-10-12 | 2015-04-22 | Thomson Licensing | Métodos e aparelhos para codificação e decodificação de vídeo de partições de modo bi-preditivo geometricamente particionadas |
| CN101415121B (zh) * | 2007-10-15 | 2010-09-29 | 华为技术有限公司 | 一种自适应的帧预测的方法及装置 |
| KR101496324B1 (ko) * | 2007-10-17 | 2015-02-26 | 삼성전자주식회사 | 영상의 부호화, 복호화 방법 및 장치 |
| KR101682516B1 (ko) * | 2008-01-07 | 2016-12-05 | 톰슨 라이센싱 | 파라미터 필터링을 사용하는 비디오 인코딩 및 디코딩을 위한 방법 및 장치 |
| US8831086B2 (en) | 2008-04-10 | 2014-09-09 | Qualcomm Incorporated | Prediction techniques for interpolation in video coding |
| US9967590B2 (en) | 2008-04-10 | 2018-05-08 | Qualcomm Incorporated | Rate-distortion defined interpolation for video coding based on fixed filter or adaptive filter |
| RU2518390C2 (ru) * | 2008-04-15 | 2014-06-10 | Франс Телеком | Кодирование и декодирование изображения или последовательности изображений, разбитых на пиксельные разделы линейной формы |
| EP2279620B1 (fr) * | 2008-04-15 | 2019-08-07 | Orange | Prediction d'images par determination prealable d'une famille de pixels de reference, codage et decodage utilisant une telle prediction |
| KR101517768B1 (ko) | 2008-07-02 | 2015-05-06 | 삼성전자주식회사 | 영상의 부호화 방법 및 장치, 그 복호화 방법 및 장치 |
| US8325796B2 (en) | 2008-09-11 | 2012-12-04 | Google Inc. | System and method for video coding using adaptive segmentation |
| KR101597253B1 (ko) * | 2008-10-27 | 2016-02-24 | 에스케이 텔레콤주식회사 | 동영상 부호화/복호화 장치, 이를 위한 적응적 디블록킹 필터링 장치와 필터링 방법, 및 기록 매체 |
| JP2012089905A (ja) * | 2009-01-13 | 2012-05-10 | Hitachi Ltd | 画像符号化装置および画像符号化方法、画像復号化装置および画像復号化方法 |
| CN106954072B (zh) * | 2009-03-12 | 2020-05-05 | 交互数字麦迪逊专利控股公司 | 去伪像滤波的基于区域的滤波器参数选择的方法和装置 |
| HUE061249T2 (hu) | 2009-03-23 | 2023-06-28 | Ntt Docomo Inc | Kép prediktív kódoló eszköz, kép prediktív kódolási eljárás, kép prediktív kódoló program, kép prediktív dekódoló eszköz, kép prediktív dekódolási eljárás, kép prediktív dekódoló program |
| KR101455579B1 (ko) * | 2009-05-29 | 2014-10-29 | 미쓰비시덴키 가부시키가이샤 | 화상 부호화 장치, 화상 복호 장치, 화상 부호화 방법, 및 화상 복호 방법 |
| JP5826747B2 (ja) * | 2009-06-26 | 2015-12-02 | トムソン ライセンシングThomson Licensing | 適応的な幾何学的な分割を使用した映像符号化及び復号化の方法及び装置 |
| EP2449784A1 (fr) * | 2009-07-03 | 2012-05-09 | France Telecom | Prédiction d'un vecteur mouvement d'une partition d'image courante de forme géometrique ou de taille différente de celle d'au moins une partition d'image de référence voisine, codage et décodage utilisant une telle prédiction |
| EP2457377A1 (en) * | 2009-07-23 | 2012-05-30 | Thomson Licensing | Methods and apparatus for adaptive transform selection for video encoding and decoding |
| KR101456498B1 (ko) * | 2009-08-14 | 2014-10-31 | 삼성전자주식회사 | 계층적 부호화 단위의 스캔 순서를 고려한 비디오 부호화 방법 및 장치, 비디오 복호화 방법 및 장치 |
| KR101510108B1 (ko) | 2009-08-17 | 2015-04-10 | 삼성전자주식회사 | 영상의 부호화 방법 및 장치, 그 복호화 방법 및 장치 |
| JP2011049740A (ja) * | 2009-08-26 | 2011-03-10 | Sony Corp | 画像処理装置および方法 |
| US10178396B2 (en) | 2009-09-04 | 2019-01-08 | Stmicroelectronics International N.V. | Object tracking |
| US8848802B2 (en) * | 2009-09-04 | 2014-09-30 | Stmicroelectronics International N.V. | System and method for object based parametric video coding |
| KR101629475B1 (ko) * | 2009-09-23 | 2016-06-22 | 삼성전자주식회사 | 기하학 기반의 블록 분할 인트라 예측을 이용한 깊이영상 부호화 방법 및 장치 |
| CN102714741B (zh) | 2009-10-14 | 2016-01-20 | 汤姆森特许公司 | 深度图处理的方法和设备 |
| KR101484280B1 (ko) * | 2009-12-08 | 2015-01-20 | 삼성전자주식회사 | 임의적인 파티션을 이용한 움직임 예측에 따른 비디오 부호화 방법 및 장치, 임의적인 파티션을 이용한 움직임 보상에 따른 비디오 복호화 방법 및 장치 |
| USRE47243E1 (en) | 2009-12-09 | 2019-02-12 | Samsung Electronics Co., Ltd. | Method and apparatus for encoding video, and method and apparatus for decoding video |
| KR101700358B1 (ko) * | 2009-12-09 | 2017-01-26 | 삼성전자주식회사 | 영상의 부호화 방법 및 장치, 그 복호화 방법 및 장치 |
| KR101675118B1 (ko) | 2010-01-14 | 2016-11-10 | 삼성전자 주식회사 | 스킵 및 분할 순서를 고려한 비디오 부호화 방법과 그 장치, 및 비디오 복호화 방법과 그 장치 |
| US8879632B2 (en) | 2010-02-18 | 2014-11-04 | Qualcomm Incorporated | Fixed point implementation for geometric motion partitioning |
| US8619857B2 (en) | 2010-04-09 | 2013-12-31 | Sharp Laboratories Of America, Inc. | Methods and systems for intra prediction |
| CN102215396A (zh) | 2010-04-09 | 2011-10-12 | 华为技术有限公司 | 一种视频编解码方法和系统 |
| US20110249734A1 (en) * | 2010-04-09 | 2011-10-13 | Segall Christopher A | Methods and Systems for Intra Prediction |
| US20110249743A1 (en) * | 2010-04-09 | 2011-10-13 | Jie Zhao | Super-block for high performance video coding |
| US8644375B2 (en) | 2010-04-09 | 2014-02-04 | Sharp Laboratories Of America, Inc. | Methods and systems for intra prediction |
| TWI678916B (zh) * | 2010-04-13 | 2019-12-01 | 美商Ge影像壓縮有限公司 | 樣本區域合倂技術 |
| CN106067985B (zh) | 2010-04-13 | 2019-06-28 | Ge视频压缩有限责任公司 | 跨平面预测 |
| KR102159896B1 (ko) | 2010-04-13 | 2020-09-25 | 지이 비디오 컴프레션, 엘엘씨 | 샘플 배열 멀티트리 세부분할에서 계승 |
| CN106231335B (zh) | 2010-04-13 | 2019-07-02 | Ge视频压缩有限责任公司 | 解码器、解码方法、编码器以及编码方法 |
| US8521006B2 (en) * | 2010-05-06 | 2013-08-27 | Intel Corporation | Boundary detection in media streams |
| US9094658B2 (en) * | 2010-05-10 | 2015-07-28 | Mediatek Inc. | Method and apparatus of adaptive loop filtering |
| US9020043B2 (en) * | 2010-05-10 | 2015-04-28 | Google Inc. | Pathway indexing in flexible partitioning |
| TWI600318B (zh) * | 2010-05-18 | 2017-09-21 | Sony Corp | Image processing apparatus and image processing method |
| US8855205B2 (en) | 2010-05-26 | 2014-10-07 | Newratek Inc. | Method of predicting motion vectors in video codec in which multiple references are allowed, and motion vector encoding/decoding apparatus using the same |
| US20110310976A1 (en) * | 2010-06-17 | 2011-12-22 | Qualcomm Incorporated | Joint Coding of Partition Information in Video Coding |
| JP2012023597A (ja) * | 2010-07-15 | 2012-02-02 | Sony Corp | 画像処理装置及び画像処理方法 |
| PL3664453T3 (pl) | 2010-07-20 | 2022-11-21 | Ntt Docomo, Inc. | Urządzenie do predykcyjnego dekodowania obrazu oraz sposób predykcyjnego dekodowania obrazu |
| KR101681303B1 (ko) * | 2010-07-29 | 2016-12-01 | 에스케이 텔레콤주식회사 | 블록 분할예측을 이용한 영상 부호화/복호화 방법 및 장치 |
| WO2012044124A2 (ko) * | 2010-09-30 | 2012-04-05 | 한국전자통신연구원 | 영상 부호화 방법과 복호화 방법 및 이를 이용한 영상 부호화 장치와 복호화 장치 |
| JP2012080369A (ja) * | 2010-10-01 | 2012-04-19 | Sony Corp | 画像処理装置及び画像処理方法 |
| US9532059B2 (en) | 2010-10-05 | 2016-12-27 | Google Technology Holdings LLC | Method and apparatus for spatial scalability for video coding |
| US8861617B2 (en) | 2010-10-05 | 2014-10-14 | Mediatek Inc | Method and apparatus of region-based adaptive loop filtering |
| KR101712156B1 (ko) * | 2010-12-06 | 2017-03-06 | 에스케이 텔레콤주식회사 | 임의의 형태의 블록을 이용한 인터예측에 의한 영상의 부호화/복호화 방법 및 장치 |
| US9462272B2 (en) * | 2010-12-13 | 2016-10-04 | Electronics And Telecommunications Research Institute | Intra prediction method and apparatus |
| EP2661879B1 (en) | 2011-01-03 | 2019-07-10 | HFI Innovation Inc. | Method of filter-unit based in-loop filtering |
| DE102011006036B4 (de) * | 2011-01-14 | 2012-12-27 | Siemens Aktiengesellschaft | Verfahren und Vorrichtungen zur Bildung eines Prädiktionswertes |
| CN102611884B (zh) | 2011-01-19 | 2014-07-09 | 华为技术有限公司 | 图像编解码方法及编解码设备 |
| WO2012120582A1 (ja) | 2011-03-07 | 2012-09-13 | パナソニック株式会社 | 動き補償装置、動画像符号化装置、動画像復号装置、動き補償方法、プログラム、及び集積回路 |
| US8718389B2 (en) * | 2011-04-13 | 2014-05-06 | Huawei Technologies Co., Ltd. | Image encoding and decoding methods and related devices |
| US9008180B2 (en) | 2011-04-21 | 2015-04-14 | Intellectual Discovery Co., Ltd. | Method and apparatus for encoding/decoding images using a prediction method adopting in-loop filtering |
| US9338476B2 (en) | 2011-05-12 | 2016-05-10 | Qualcomm Incorporated | Filtering blockiness artifacts for video coding |
| US8989256B2 (en) | 2011-05-25 | 2015-03-24 | Google Inc. | Method and apparatus for using segmentation-based coding of prediction information |
| US8964833B2 (en) | 2011-07-19 | 2015-02-24 | Qualcomm Incorporated | Deblocking of non-square blocks for video coding |
| KR102231417B1 (ko) | 2011-09-22 | 2021-03-24 | 엘지전자 주식회사 | 영상 정보 시그널링 방법 및 장치와 이를 이용한 디코딩 방법 및 장치 |
| US9838692B2 (en) * | 2011-10-18 | 2017-12-05 | Qualcomm Incorporated | Detecting availabilities of neighboring video units for video coding |
| KR20130050149A (ko) * | 2011-11-07 | 2013-05-15 | 오수미 | 인터 모드에서의 예측 블록 생성 방법 |
| RU2566957C2 (ru) | 2011-11-08 | 2015-10-27 | Самсунг Электроникс Ко., Лтд. | Способ и устройство для определения вектора движения в кодировании или декодировании видео |
| EP2777286B1 (en) | 2011-11-11 | 2017-01-04 | GE Video Compression, LLC | Effective wedgelet partition coding |
| EP2777283B1 (en) * | 2011-11-11 | 2018-01-10 | GE Video Compression, LLC | Effective prediction using partition coding |
| HUE034631T2 (en) | 2011-11-11 | 2018-02-28 | Ge Video Compression Llc | Adaptive partition coding |
| CN104126303B (zh) * | 2011-11-29 | 2018-03-06 | 华为技术有限公司 | 用于高效率视频译码的统一分割结构和信令方法 |
| KR101718894B1 (ko) | 2011-11-29 | 2017-03-23 | 삼성전자주식회사 | 기기 제어를 위한 유저 인터페이스 제공 시스템 및 방법 |
| US9247257B1 (en) | 2011-11-30 | 2016-01-26 | Google Inc. | Segmentation based entropy encoding and decoding |
| US9531990B1 (en) | 2012-01-21 | 2016-12-27 | Google Inc. | Compound prediction using multiple sources or prediction modes |
| US9094681B1 (en) | 2012-02-28 | 2015-07-28 | Google Inc. | Adaptive segmentation |
| US8737824B1 (en) | 2012-03-09 | 2014-05-27 | Google Inc. | Adaptively encoding a media stream with compound prediction |
| US20130287109A1 (en) * | 2012-04-29 | 2013-10-31 | Qualcomm Incorporated | Inter-layer prediction through texture segmentation for video coding |
| US9185429B1 (en) | 2012-04-30 | 2015-11-10 | Google Inc. | Video encoding and decoding using un-equal error protection |
| US9185414B1 (en) | 2012-06-29 | 2015-11-10 | Google Inc. | Video encoding using variance |
| GB2504069B (en) | 2012-07-12 | 2015-09-16 | Canon Kk | Method and device for predicting an image portion for encoding or decoding of an image |
| US9332276B1 (en) | 2012-08-09 | 2016-05-03 | Google Inc. | Variable-sized super block based direct prediction mode |
| US9380298B1 (en) | 2012-08-10 | 2016-06-28 | Google Inc. | Object-based intra-prediction |
| CN103634612A (zh) * | 2012-08-22 | 2014-03-12 | 成都爱斯顿测控技术有限公司 | 工业级音频视频处理平台 |
| CN102833551B (zh) * | 2012-09-25 | 2014-10-29 | 中南大学 | 一种Slice级编解码端联合时间最小化方法 |
| CN104838650B (zh) | 2012-09-28 | 2018-03-30 | 日本电信电话株式会社 | 帧内预测编码方法、帧内预测解码方法、帧内预测编码装置、帧内预测解码装置以及记录程序的记录介质 |
| US9826229B2 (en) | 2012-09-29 | 2017-11-21 | Google Technology Holdings LLC | Scan pattern determination from base layer pixel information for scalable extension |
| US9350988B1 (en) | 2012-11-20 | 2016-05-24 | Google Inc. | Prediction mode-based block ordering in video coding |
| US9628790B1 (en) | 2013-01-03 | 2017-04-18 | Google Inc. | Adaptive composite intra prediction for image and video compression |
| US9681128B1 (en) | 2013-01-31 | 2017-06-13 | Google Inc. | Adaptive pre-transform scanning patterns for video and image compression |
| KR101369174B1 (ko) * | 2013-03-20 | 2014-03-10 | 에스케이텔레콤 주식회사 | 고해상도 동영상의 부호화/복호화 방법 및 장치 |
| CN103313053B (zh) * | 2013-05-14 | 2016-05-25 | 浙江万里学院 | 一种面向视觉对象的形状编码方法 |
| US9247251B1 (en) | 2013-07-26 | 2016-01-26 | Google Inc. | Right-edge extension for quad-tree intra-prediction |
| WO2015015681A1 (ja) * | 2013-07-31 | 2015-02-05 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 画像符号化方法および画像符号化装置 |
| US9609343B1 (en) * | 2013-12-20 | 2017-03-28 | Google Inc. | Video coding using compound prediction |
| US9392272B1 (en) | 2014-06-02 | 2016-07-12 | Google Inc. | Video coding using adaptive source variance based partitioning |
| US10200717B2 (en) * | 2014-06-19 | 2019-02-05 | Sharp Kabushiki Kaisha | Image decoding device, image coding device, and predicted image generation device |
| CN104036510A (zh) * | 2014-06-20 | 2014-09-10 | 常州艾格勒信息技术有限公司 | 一种新型图像分割系统及方法 |
| US9578324B1 (en) | 2014-06-27 | 2017-02-21 | Google Inc. | Video coding using statistical-based spatially differentiated partitioning |
| US20160050440A1 (en) * | 2014-08-15 | 2016-02-18 | Ying Liu | Low-complexity depth map encoder with quad-tree partitioned compressed sensing |
| CN107005707A (zh) * | 2014-10-31 | 2017-08-01 | 三星电子株式会社 | 用于对图像进行编码或解码的方法和装置 |
| KR101624659B1 (ko) | 2015-01-05 | 2016-05-27 | 삼성전자주식회사 | 영상의 복호화 방법 및 장치 |
| KR101624660B1 (ko) | 2015-04-14 | 2016-05-27 | 삼성전자주식회사 | 영상의 복호화 방법 및 장치 |
| KR20180005186A (ko) * | 2015-05-12 | 2018-01-15 | 삼성전자주식회사 | 인트라 예측을 수행하는 영상 복호화 방법 및 그 장치 및 인트라 예측을 수행하는 영상 부호화 방법 및 그 장치 |
| JP6510902B2 (ja) * | 2015-06-15 | 2019-05-08 | 日本放送協会 | 符号化装置、復号装置及びプログラム |
| CN116915996A (zh) | 2016-04-29 | 2023-10-20 | 世宗大学校产学协力团 | 视频信号编码/解码方法和设备 |
| KR102365937B1 (ko) * | 2016-04-29 | 2022-02-22 | 세종대학교산학협력단 | 영상 신호 부호화/복호화 방법 및 장치 |
| CN106331706B (zh) * | 2016-05-03 | 2019-04-30 | 上海兆芯集成电路有限公司 | 基于曲线拟合的率失真优化方法以及使用该方法的装置 |
| CN117221596A (zh) | 2016-06-22 | 2023-12-12 | Lx 半导体科技有限公司 | 图像编码/解码方法以及图像数据的传输方法 |
| EP3469793A1 (en) * | 2016-06-24 | 2019-04-17 | Huawei Technologies Co., Ltd. | Devices and methods for video coding using segmentation based partitioning of video coding blocks |
| EP3469792A1 (en) | 2016-06-24 | 2019-04-17 | Huawei Technologies Co., Ltd. | Devices and methods for video coding using segmentation based partitioning of video coding blocks |
| EP3301931A1 (en) | 2016-09-30 | 2018-04-04 | Thomson Licensing | Method and apparatus for omnidirectional video coding with adaptive intra prediction |
| WO2018066991A1 (ko) | 2016-10-04 | 2018-04-12 | 김기백 | 영상 데이터 부호화/복호화 방법 및 장치 |
| US20190238888A1 (en) | 2017-07-17 | 2019-08-01 | Ki Baek Kim | Image data encoding/decoding method and apparatus |
| KR20180045530A (ko) * | 2016-10-26 | 2018-05-04 | 디지털인사이트 주식회사 | 임의의 블록 분할을 사용하는 비디오 코딩 방법 및 장치 |
| US10965943B2 (en) * | 2016-12-28 | 2021-03-30 | Sony Corporation | Image processing apparatus and image processing method |
| WO2018141416A1 (en) | 2017-02-06 | 2018-08-09 | Huawei Technologies Co., Ltd. | Video encoder and decoder for predictive partitioning |
| CN110809888B (zh) * | 2017-06-30 | 2022-12-06 | 华为技术有限公司 | 用于处理视频序列帧的编码器和解码器 |
| CN115118988A (zh) * | 2017-06-30 | 2022-09-27 | 华为技术有限公司 | 用于运动向量细化的搜索区域 |
| US20200137422A1 (en) * | 2017-06-30 | 2020-04-30 | Sharp Kabushiki Kaisha | Systems and methods for geometry-adaptive block partitioning of a picture into video blocks for video coding |
| EP3673651A4 (en) * | 2017-08-22 | 2020-07-01 | Panasonic Intellectual Property Corporation of America | IMAGE ENCODER, IMAGE DECODER, IMAGE ENCODING METHOD, AND IMAGE DECODING METHOD |
| EP3454556A1 (en) * | 2017-09-08 | 2019-03-13 | Thomson Licensing | Method and apparatus for video encoding and decoding using pattern-based block filtering |
| WO2019069782A1 (ja) * | 2017-10-06 | 2019-04-11 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 符号化装置、復号装置、符号化方法及び復号方法 |
| US11159793B2 (en) | 2017-10-16 | 2021-10-26 | Digitalinsights Inc. | Method, device, and recording medium storing bit stream, for encoding/decoding image |
| WO2019151284A1 (ja) * | 2018-01-30 | 2019-08-08 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 符号化装置、復号装置、符号化方法及び復号方法 |
| JP2021514162A (ja) * | 2018-02-22 | 2021-06-03 | エルジー エレクトロニクス インコーポレイティド | 映像コーディングシステムにおけるブロック分割構造による映像デコーディング方法及び装置 |
| US10708625B2 (en) * | 2018-06-12 | 2020-07-07 | Alibaba Group Holding Limited | Adaptive deblocking filter |
| US11695967B2 (en) | 2018-06-22 | 2023-07-04 | Op Solutions, Llc | Block level geometric partitioning |
| US10382772B1 (en) * | 2018-07-02 | 2019-08-13 | Tencent America LLC | Method and apparatus for video coding |
| US10284844B1 (en) | 2018-07-02 | 2019-05-07 | Tencent America LLC | Method and apparatus for video coding |
| MX2021002557A (es) * | 2018-09-07 | 2021-04-29 | Panasonic Ip Corp America | Sistema y metodo para codificacion de video. |
| SG11202103372XA (en) * | 2018-10-01 | 2021-04-29 | Op Solutions Llc | Methods and systems of exponential partitioning |
| CN111147855A (zh) * | 2018-11-02 | 2020-05-12 | 北京字节跳动网络技术有限公司 | 几何分割预测模式与其他工具之间的协调 |
| KR20210084479A (ko) * | 2018-11-06 | 2021-07-07 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | 모션 정보의 위치 의존적 저장 |
| KR20210089133A (ko) | 2018-11-06 | 2021-07-15 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | 인트라 예측에 대한 단순화된 파라미터 유도 |
| CN113170112A (zh) * | 2018-11-22 | 2021-07-23 | 北京字节跳动网络技术有限公司 | 用于具有几何分割的帧间预测的构建方法 |
| WO2020108591A1 (en) * | 2018-12-01 | 2020-06-04 | Beijing Bytedance Network Technology Co., Ltd. | Parameter derivation for intra prediction |
| WO2020114405A1 (en) * | 2018-12-03 | 2020-06-11 | Beijing Bytedance Network Technology Co., Ltd. | Indication method of maximum number of candidates |
| CN113228656B (zh) | 2018-12-21 | 2023-10-31 | 北京字节跳动网络技术有限公司 | 使用多项式模型的帧间预测 |
| CN109819255B (zh) | 2018-12-28 | 2020-01-03 | 杭州海康威视数字技术股份有限公司 | 一种编解码方法及其设备 |
| BR112021014788A2 (pt) | 2019-01-28 | 2021-09-28 | Op Solutions, Llc | Interpredição em divisão geométrica com um número adaptativo de regiões |
| US10742972B1 (en) * | 2019-03-08 | 2020-08-11 | Tencent America LLC | Merge list construction in triangular prediction |
| WO2020248105A1 (zh) * | 2019-06-10 | 2020-12-17 | Oppo广东移动通信有限公司 | 预测值的确定方法、编码器以及计算机存储介质 |
| JP2022537426A (ja) * | 2019-06-21 | 2022-08-25 | ホアウェイ・テクノロジーズ・カンパニー・リミテッド | 幾何学的分割モードのためのクロマサンプル重みの導出 |
| CA3140818A1 (en) * | 2019-06-21 | 2020-12-24 | Semih Esenlik | An encoder, a decoder and corresponding methods for sub-block partitioning mode |
| US11190777B2 (en) * | 2019-06-30 | 2021-11-30 | Tencent America LLC | Method and apparatus for video coding |
| WO2021008513A1 (en) * | 2019-07-14 | 2021-01-21 | Beijing Bytedance Network Technology Co., Ltd. | Transform block size restriction in video coding |
| US11375243B2 (en) * | 2019-07-17 | 2022-06-28 | Tencent America LLC | Method and apparatus for video coding |
| US20220321890A1 (en) * | 2019-07-23 | 2022-10-06 | Electronics And Telecommunications Research Institute | Method, apparatus, and recording medium for encoding/decoding image by using geometric partitioning |
| US11317090B2 (en) * | 2019-08-12 | 2022-04-26 | Tencent America LLC | Method and apparatus for video coding |
| IL291768A (en) | 2019-10-03 | 2022-06-01 | Huawei Tech Co Ltd | Encoding process for geometric division mode |
| US11533498B2 (en) * | 2019-11-21 | 2022-12-20 | Tencent America LLC | Geometric partitioning mode in video coding |
| US11317094B2 (en) * | 2019-12-24 | 2022-04-26 | Tencent America LLC | Method and apparatus for video coding using geometric partitioning mode |
| CN114902663A (zh) * | 2019-12-30 | 2022-08-12 | 鸿颖创新有限公司 | 用于编码视频数据的设备和方法 |
| CN113473141A (zh) * | 2020-03-31 | 2021-10-01 | Oppo广东移动通信有限公司 | 帧间预测方法、编码器、解码器及计算机可读存储介质 |
| WO2022047099A1 (en) * | 2020-08-28 | 2022-03-03 | Op Solutions, Llc | Methods and systems of adaptive geometric partitioning |
| WO2022047117A1 (en) * | 2020-08-28 | 2022-03-03 | Op Solutions, Llc | Methods and systems of adaptive geometric partitioning |
| US20230237612A1 (en) * | 2022-01-26 | 2023-07-27 | Intuitive Research And Technology Corporation | Determining volume of a selectable region using extended reality |
| WO2023158765A1 (en) * | 2022-02-16 | 2023-08-24 | Beijing Dajia Internet Information Technology Co., Ltd. | Methods and devices for geometric partitioning mode split modes reordering with pre-defined modes order |
| WO2023224279A1 (ko) * | 2022-05-16 | 2023-11-23 | 현대자동차주식회사 | 기하학적 움직임 예측을 사용하는 비디오 코딩을 위한 방법 및 장치 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06327003A (ja) * | 1993-05-14 | 1994-11-25 | Nec Corp | 動画像の予測符号化方式 |
| JPH08205172A (ja) * | 1995-01-26 | 1996-08-09 | Mitsubishi Electric Corp | 領域分割型動き予測回路、領域分割型動き予測回路内蔵画像符号化装置および領域分割型動き予測画像復号化装置 |
| JPH0965338A (ja) * | 1995-08-28 | 1997-03-07 | Graphics Commun Lab:Kk | 画像符号化装置および画像復号化装置 |
| JP2005277968A (ja) * | 2004-03-25 | 2005-10-06 | Matsushita Electric Ind Co Ltd | 画像符号化方法および画像復号化方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3392628B2 (ja) * | 1996-03-29 | 2003-03-31 | 富士通株式会社 | 輪郭抽出方法及びシステム |
| ES2190935T3 (es) * | 1996-05-28 | 2003-09-01 | Matsushita Electric Ind Co Ltd | Procedimiento y dispositivo de anticipacion y de codificado/descodificado de imagen. |
| EP2099228B1 (en) * | 2001-09-14 | 2014-11-12 | NTT DoCoMo, Inc. | Coding method, decoding method, coding apparatus, decoding apparatus, image processing system, coding program, and decoding program |
| RU2322770C2 (ru) * | 2002-04-23 | 2008-04-20 | Нокиа Корпорейшн | Способ и устройство для указания параметров квантователя в системе видеокодирования |
| US20040091047A1 (en) | 2002-11-11 | 2004-05-13 | Sony Corporation | Method and apparatus for nonlinear multiple motion model and moving boundary extraction |
| KR20050105271A (ko) * | 2003-03-03 | 2005-11-03 | 코닌클리케 필립스 일렉트로닉스 엔.브이. | 비디오 인코딩 |
| KR100513014B1 (ko) * | 2003-05-22 | 2005-09-05 | 엘지전자 주식회사 | 비디오 코딩 시스템 및 비디오 코딩 방법 |
| JP2005123732A (ja) * | 2003-10-14 | 2005-05-12 | Matsushita Electric Ind Co Ltd | デブロックフィルタ処理装置およびデブロックフィルタ処理方法 |
| JP4142563B2 (ja) * | 2003-12-12 | 2008-09-03 | 株式会社エヌ・ティ・ティ・ドコモ | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム |
| CN100473161C (zh) * | 2005-09-09 | 2009-03-25 | 海信集团有限公司 | 基于avs的4×4离散余弦变换的快速并行装置及其方法 |
| EP2050279B1 (en) | 2006-08-02 | 2018-08-29 | Thomson Licensing | Adaptive geometric partitioning for video decoding |
| JP6327003B2 (ja) | 2014-06-20 | 2018-05-23 | 三菱ケミカル株式会社 | イミノジ酢酸型キレート樹脂の製造方法 |
-
2007
- 2007-07-31 EP EP07836372.8A patent/EP2050279B1/en active Active
- 2007-07-31 WO PCT/US2007/017114 patent/WO2008016605A2/en active Application Filing
- 2007-07-31 US US12/309,496 patent/US20120177106A1/en not_active Abandoned
- 2007-07-31 CN CN2007800288680A patent/CN101502120B/zh active Active
- 2007-07-31 CN CN2007800288587A patent/CN101502119B/zh active Active
- 2007-07-31 BR BRPI0714859-3A patent/BRPI0714859A2/pt not_active IP Right Cessation
- 2007-07-31 KR KR1020097002021A patent/KR101526914B1/ko active IP Right Grant
- 2007-07-31 US US12/309,540 patent/US20090196342A1/en not_active Abandoned
- 2007-07-31 BR BRPI0715507-7A patent/BRPI0715507A2/pt not_active Application Discontinuation
- 2007-07-31 JP JP2009522843A patent/JP2009545920A/ja active Pending
- 2007-07-31 WO PCT/US2007/017118 patent/WO2008016609A2/en active Application Filing
- 2007-07-31 KR KR1020097002015A patent/KR101380580B1/ko active IP Right Grant
- 2007-07-31 EP EP07836376.9A patent/EP2047687B1/en active Active
- 2007-07-31 JP JP2009522842A patent/JP2009545919A/ja active Pending
-
2013
- 2013-11-01 JP JP2013228029A patent/JP6109712B2/ja active Active
- 2013-11-01 JP JP2013228049A patent/JP2014060764A/ja active Pending
-
2015
- 2015-04-01 JP JP2015074756A patent/JP2015144487A/ja active Pending
-
2017
- 2017-04-07 US US15/482,191 patent/US20170280156A1/en not_active Abandoned
-
2020
- 2020-10-28 US US17/083,007 patent/US11252435B2/en active Active
-
2022
- 2022-01-04 US US17/568,311 patent/US11895327B2/en active Active
-
2023
- 2023-12-20 US US18/391,517 patent/US20240129524A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06327003A (ja) * | 1993-05-14 | 1994-11-25 | Nec Corp | 動画像の予測符号化方式 |
| JPH08205172A (ja) * | 1995-01-26 | 1996-08-09 | Mitsubishi Electric Corp | 領域分割型動き予測回路、領域分割型動き予測回路内蔵画像符号化装置および領域分割型動き予測画像復号化装置 |
| JPH0965338A (ja) * | 1995-08-28 | 1997-03-07 | Graphics Commun Lab:Kk | 画像符号化装置および画像復号化装置 |
| JP2005277968A (ja) * | 2004-03-25 | 2005-10-06 | Matsushita Electric Ind Co Ltd | 画像符号化方法および画像復号化方法 |
Non-Patent Citations (3)
| Title |
|---|
| JPN5009015806; BRONSHTEIN I N: HANDBOOK OF MATHEMATICS.PASSAGE , 2004, P194-195, SPRINGER * |
| JPN6012037774; David L. Donoho: 'Wedgelets: Nearly Minimax Estimation of Edges' The Annals of Statistics Vol.27, No.3, 1999, p.859-897 * |
| JPN6012037776; Satoshi Kondo and Hisao Sasai: 'A Motion Compensation Technique Using Slices Blocks In Hybrid Video Coding' IEEE International Conference on Image Processing, 2005. ICIP 2005. Vol.2, 20050911, p.II-305-308, IEEE * |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010508706A (ja) * | 2006-10-30 | 2010-03-18 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー. | ビデオシーケンスフレームを分解する方法 |
| JP2010524396A (ja) * | 2007-04-12 | 2010-07-15 | トムソン ライセンシング | ビデオエンコーダにおける高速な幾何学的なモードの判定方法及び装置 |
| JP2013055689A (ja) * | 2007-04-12 | 2013-03-21 | Thomson Licensing | ビデオエンコーダにおける高速な幾何学的なモードの判定方法及び装置 |
| JP2013055690A (ja) * | 2007-04-12 | 2013-03-21 | Thomson Licensing | ビデオエンコーダにおける高速な幾何学的なモードの判定方法及び装置 |
| JP2013158046A (ja) * | 2007-04-12 | 2013-08-15 | Thomson Licensing | ビデオエンコーダにおける高速な幾何学的なモードの判定方法及び装置 |
| US9288504B2 (en) | 2007-04-12 | 2016-03-15 | Thomson Licensing | Method and apparatus for fast geometric mode desicion in a video encoder |
| JP2013537764A (ja) * | 2010-08-19 | 2013-10-03 | トムソン ライセンシング | 画像の現在のブロックを再構築する方法および対応する符号化方法、対応する符号化装置、さらに、ビットストリームに符号化された画像を保持する記憶媒体 |
| JP2022523309A (ja) * | 2019-01-28 | 2022-04-22 | オーピー ソリューションズ, エルエルシー | 指数関数的分割におけるインター予測 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101502120B (zh) | 2012-08-29 |
| WO2008016609A3 (en) | 2008-10-09 |
| EP2050279B1 (en) | 2018-08-29 |
| US20090196342A1 (en) | 2009-08-06 |
| WO2008016605A2 (en) | 2008-02-07 |
| US20220132162A1 (en) | 2022-04-28 |
| CN101502119B (zh) | 2012-05-23 |
| JP2014060764A (ja) | 2014-04-03 |
| KR101380580B1 (ko) | 2014-04-02 |
| CN101502120A (zh) | 2009-08-05 |
| WO2008016609A2 (en) | 2008-02-07 |
| JP2014060763A (ja) | 2014-04-03 |
| JP6109712B2 (ja) | 2017-04-05 |
| WO2008016605A3 (en) | 2008-10-23 |
| CN101502119A (zh) | 2009-08-05 |
| BRPI0714859A2 (pt) | 2013-05-21 |
| JP2015144487A (ja) | 2015-08-06 |
| JP2009545920A (ja) | 2009-12-24 |
| BRPI0715507A2 (pt) | 2013-06-18 |
| EP2050279A2 (en) | 2009-04-22 |
| EP2047687A2 (en) | 2009-04-15 |
| US20120177106A1 (en) | 2012-07-12 |
| KR20090046814A (ko) | 2009-05-11 |
| EP2047687B1 (en) | 2018-05-16 |
| US20210044826A1 (en) | 2021-02-11 |
| US11895327B2 (en) | 2024-02-06 |
| KR101526914B1 (ko) | 2015-06-08 |
| US11252435B2 (en) | 2022-02-15 |
| US20170280156A1 (en) | 2017-09-28 |
| KR20090046815A (ko) | 2009-05-11 |
| US20240129524A1 (en) | 2024-04-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6109712B2 (ja) | ビデオ符号化処理のためにアダブティブなジオメトリック分割を行う方法および装置 | |
| JP5368482B2 (ja) | ビデオ符号化および復号におけるインプリシットなブロック分割のための方法および装置 | |
| JP6251627B2 (ja) | ジオメトリック分割されたスーパブロックをビデオ符号化およびビデオ復号する方法および装置 | |
| JP5061179B2 (ja) | 照明変化補償動き予測符号化および復号化方法とその装置 | |
| JP6538488B2 (ja) | 映像符号化のためのdcイントラ予測モードのための方法 | |
| CN115134608A (zh) | 使用自适应去块滤波编码和解码图像的方法及其装置 | |
| JP4317814B2 (ja) | 動画像情報の符号化装置及び符号化方法 | |
| JP2010135864A (ja) | 画像符号化方法及び装置並びに画像復号化方法及び装置 | |
| TW200952499A (en) | Apparatus and method for computationally efficient intra prediction in a video coder | |
| CN111010578B (zh) | 一种帧内帧间联合预测的方法、装置以及存储介质 | |
| JP2023118926A (ja) | 復号化方法、復号化デバイス、復号化側機器、電子機器及び不揮発性記憶媒体 | |
| JP2023063506A (ja) | 構築されたアフィンマージ候補を導出する方法 | |
| CN117941345A (zh) | 图像解码装置、图像解码方法及程序 | |
| JP2010233135A (ja) | 動画像符号化装置および動画像復号装置 | |
| WO2011142221A1 (ja) | 符号化装置、および、復号装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100727 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100727 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120618 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120725 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20121018 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20121025 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130124 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130703 |