JP2009240886A - 遠心機 - Google Patents
遠心機 Download PDFInfo
- Publication number
- JP2009240886A JP2009240886A JP2008089297A JP2008089297A JP2009240886A JP 2009240886 A JP2009240886 A JP 2009240886A JP 2008089297 A JP2008089297 A JP 2008089297A JP 2008089297 A JP2008089297 A JP 2008089297A JP 2009240886 A JP2009240886 A JP 2009240886A
- Authority
- JP
- Japan
- Prior art keywords
- data
- recording medium
- magnetic
- input signal
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Abstract
【解決手段】制御装置8は、磁気ヘッド10に入力する運転実績データの入力信号(理想値)Siを、ロータ3の回転センサ7から入力される回転検出信号に同期して生成し、データ入力信号Siに基づいて記憶したデータを、磁気ヘッドを介して回転検出信号に同期して再生させ、再生データと理想値Siのずれ量を補正して磁気記録媒体9に再度記録することによってデータ補正を行う。
【選択図】図3
Description
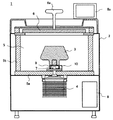
5:ロータ室 5a:底部材(プレート) 5b:仕切り部材 6:ドア
6a:ドアのノブ 7:回転センサ 8:制御装置(コントローラ)
8a:演算部 8b:メモリ部 8c:表示部 8d:タイマ部
8e:制御部 8f:駆動部 8g:読出部 8h:書込部
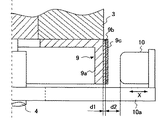
9:磁気記録媒体 9a:アルミニウム基板 9b:磁気皮膜
9c:コーティング膜(保護膜) 10:磁気ヘッド 10a:移動部材
Claims (5)
- 試料を保持した状態でモータによって回転駆動され、かつデータを記録する磁気記録媒体を有するロータと、前記磁気記録媒体のデータを再生または前記磁気記録媒体にデータを記録させるために、前記磁気記録媒体に近接した位置に配設される磁気ヘッドと、前記ロータの回転速度を検出するための回転センサと、前記回転センサの回転検出信号に基づいて前記モータの回転を制御し、かつ前記磁気記録媒体に対しデータの再生またはデータの記録を行うように前記磁気ヘッドを制御する制御装置と、を具備する遠心機において、前記制御装置は、前記データの記録を行うために前記磁気ヘッドに入力するデータ入力信号を、前記回転センサから入力される前記回転検出信号に同期して生成することを特徴とする遠心機。
- 前記データ入力信号は、ビット信号を複数のパルス幅でMFM変調した2値化信号であることを特徴とする請求項1に記載された遠心機。
- 前記制御装置は、前記データ入力信号を記録するメモリ部を有し、前記磁気記録媒体に記録された前記データ入力信号を、前記磁気ヘッドを介して再生し、該再生出力信号と前記データ入力信号から補正データを算出し、該補正データと前記データ入力信号に基づいて補正したデータ入力信号を生成し、該補正データ入力信号を、前記磁気ヘッドを介して前記磁気記録媒体に再記録させることを特徴とする請求項1または請求項2に記載された遠心機。
- 前記制御装置は、前記データ入力信号から算出した前記補正データが許容範囲外であると判別した場合、遠心機の故障と判別することを特徴とする請求項3に記載された遠心機。
- 前記磁気記録媒体に記録されるデータは、前記ロータの寿命を判断するための運転実績データであることを特徴とする請求項1乃至請求項4のいずれか一つに記載された遠心機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008089297A JP2009240886A (ja) | 2008-03-31 | 2008-03-31 | 遠心機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008089297A JP2009240886A (ja) | 2008-03-31 | 2008-03-31 | 遠心機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009240886A true JP2009240886A (ja) | 2009-10-22 |
| JP2009240886A5 JP2009240886A5 (ja) | 2010-10-21 |
Family
ID=41303432
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008089297A Pending JP2009240886A (ja) | 2008-03-31 | 2008-03-31 | 遠心機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009240886A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017125072A1 (zh) * | 2016-01-20 | 2017-07-27 | 珠海格力节能环保制冷技术研究中心有限公司 | 一种用于磁悬浮离心机的停机方法及装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0581756A (ja) * | 1991-09-19 | 1993-04-02 | Nippon Signal Co Ltd:The | 磁気カード処理方法及び装置 |
| JPH08180499A (ja) * | 1994-12-21 | 1996-07-12 | Matsushita Electric Ind Co Ltd | 情報記録媒体および記録再生装置 |
| JPH10174903A (ja) * | 1996-10-18 | 1998-06-30 | Hitachi Koki Co Ltd | オーバースピード保護装置を有する遠心機 |
| JP2001104834A (ja) * | 1999-10-05 | 2001-04-17 | Hitachi Koki Co Ltd | 遠心分離機のロータ寿命管理装置 |
| JP2008062126A (ja) * | 2006-09-05 | 2008-03-21 | Hitachi Koki Co Ltd | 遠心機 |
-
2008
- 2008-03-31 JP JP2008089297A patent/JP2009240886A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0581756A (ja) * | 1991-09-19 | 1993-04-02 | Nippon Signal Co Ltd:The | 磁気カード処理方法及び装置 |
| JPH08180499A (ja) * | 1994-12-21 | 1996-07-12 | Matsushita Electric Ind Co Ltd | 情報記録媒体および記録再生装置 |
| JPH10174903A (ja) * | 1996-10-18 | 1998-06-30 | Hitachi Koki Co Ltd | オーバースピード保護装置を有する遠心機 |
| JP2001104834A (ja) * | 1999-10-05 | 2001-04-17 | Hitachi Koki Co Ltd | 遠心分離機のロータ寿命管理装置 |
| JP2008062126A (ja) * | 2006-09-05 | 2008-03-21 | Hitachi Koki Co Ltd | 遠心機 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017125072A1 (zh) * | 2016-01-20 | 2017-07-27 | 珠海格力节能环保制冷技术研究中心有限公司 | 一种用于磁悬浮离心机的停机方法及装置 |
| US10850287B2 (en) | 2016-01-20 | 2020-12-01 | Gree Green Refrigeration Technology Center Co., Ltd. Of Zhuhai | Method and device for stopping a magnetic suspension centrifuge |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7760601B2 (en) | Reproducing apparatus with built-in optical disk drive | |
| KR100712559B1 (ko) | 기준 클럭 주파수 조정 방법 및 장치와 이를 이용한 디스크드라이브 | |
| US7130255B2 (en) | Method of CD/DVD vibration detection by monitoring motor conditions | |
| JP2010027138A (ja) | 磁気ディスク装置及びその制御方法 | |
| JP2008062126A (ja) | 遠心機 | |
| JPH0522296B2 (ja) | ||
| JP2009240886A (ja) | 遠心機 | |
| JP2013530483A (ja) | テープ・ドライブの速度制御 | |
| JP2009262059A (ja) | 遠心機 | |
| JP2010125434A (ja) | 遠心機 | |
| JP2535951B2 (ja) | ディスク駆動装置 | |
| US20030072237A1 (en) | Method for detecting the innermost radial position of the optical pickup in an optical disk apparatus and such optical disk apparatus | |
| JP3738216B2 (ja) | 光ディスク再生装置 | |
| KR20080061639A (ko) | 다수의 디스크저장장치의 스핀업 동작을 시간차로 구동하는데이터기록장치 및 그 방법 | |
| JP3867681B2 (ja) | カルーセルチェンジャ | |
| JP2003187516A (ja) | 磁気記録装置 | |
| JP2005056490A (ja) | ディスク再生装置 | |
| JP2002074819A (ja) | ディスク制動装置 | |
| JPH09308285A (ja) | 円盤状記憶媒体の回転駆動制御装置 | |
| JP2005100484A (ja) | 光ディスク装置 | |
| EP1396858A2 (en) | Method for reproducing data and control device using controllable dummy read gate | |
| JP2002157736A (ja) | 光ディスク装置およびその駆動方法 | |
| JPH05347053A (ja) | デジタル信号再生装置及びドラム回転制御方法 | |
| JP2004127377A (ja) | 光ディスク記録再生装置、光ディスク装置、および光ディスク装置の偏心量測定方法 | |
| JP2005302242A (ja) | 光ディスク再生装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100906 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100906 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111012 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20111017 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A521 | Written amendment |
Effective date: 20111111 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A02 | Decision of refusal |
Effective date: 20120424 Free format text: JAPANESE INTERMEDIATE CODE: A02 |