JP2010027138A - 磁気ディスク装置及びその制御方法 - Google Patents
磁気ディスク装置及びその制御方法 Download PDFInfo
- Publication number
- JP2010027138A JP2010027138A JP2008186714A JP2008186714A JP2010027138A JP 2010027138 A JP2010027138 A JP 2010027138A JP 2008186714 A JP2008186714 A JP 2008186714A JP 2008186714 A JP2008186714 A JP 2008186714A JP 2010027138 A JP2010027138 A JP 2010027138A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- magnetic head
- write clock
- phase
- processing unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/02—Recording, reproducing, or erasing methods; Read, write or erase circuits therefor
- G11B5/09—Digital recording
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B82—NANOTECHNOLOGY
- B82Y—SPECIFIC USES OR APPLICATIONS OF NANOSTRUCTURES; MEASUREMENT OR ANALYSIS OF NANOSTRUCTURES; MANUFACTURE OR TREATMENT OF NANOSTRUCTURES
- B82Y10/00—Nanotechnology for information processing, storage or transmission, e.g. quantum computing or single electron logic
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10305—Improvement or modification of read or write signals signal quality assessment
- G11B20/10398—Improvement or modification of read or write signals signal quality assessment jitter, timing deviations or phase and frequency errors
- G11B20/10435—Improvement or modification of read or write signals signal quality assessment jitter, timing deviations or phase and frequency errors by verifying the timing of predetermined signal patterns, e.g. sync patterns
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/18—Error detection or correction; Testing, e.g. of drop-outs
- G11B20/1879—Direct read-after-write methods
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/48—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed
- G11B5/58—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B5/596—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following for track following on disks
- G11B5/59605—Circuits
- G11B5/59616—Synchronisation; Clocking
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/74—Record carriers characterised by the form, e.g. sheet shaped to wrap around a drum
- G11B5/743—Patterned record carriers, wherein the magnetic recording layer is patterned into magnetic isolated data islands, e.g. discrete tracks
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B2220/00—Record carriers by type
- G11B2220/20—Disc-shaped record carriers
- G11B2220/25—Disc-shaped record carriers characterised in that the disc is based on a specific recording technology
- G11B2220/2508—Magnetic discs
- G11B2220/2516—Hard disks
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B2220/00—Record carriers by type
- G11B2220/20—Disc-shaped record carriers
- G11B2220/25—Disc-shaped record carriers characterised in that the disc is based on a specific recording technology
- G11B2220/2508—Magnetic discs
- G11B2220/252—Patterned or quantised magnetic media, i.e. bits are stored in predefined single domain elements
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Chemical & Material Sciences (AREA)
- Nanotechnology (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Theoretical Computer Science (AREA)
- Crystallography & Structural Chemistry (AREA)
- Signal Processing For Digital Recording And Reproducing (AREA)
- Digital Magnetic Recording (AREA)
- Recording Or Reproducing By Magnetic Means (AREA)
Abstract
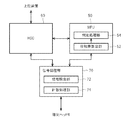
【解決手段】本発明の磁気ディスク装置は、磁気的に分離された複数の磁性要素が所定の配列周期で配列されたトラックを有する磁気ディスクと、トラックに追従し、データの書き込み及び読み出しを行う磁気ヘッド4と、磁性要素の配列周期に対応する周期のライトクロックに基づいて記録信号を生成し、磁気ヘッド4に出力する信号処理部70と、トラックのうち磁気ヘッド4によりデータが書き込まれる範囲を含んだ所定範囲の終点に磁気ヘッド4が達したときのライトクロックの位相を検出する位相検出部51と、所定範囲の終点に磁気ヘッドが達したときのライトクロックの位相の予想値と検出値との位相差に基づいて、データの書き込みの成否を判定する判定処理部55と、を備える。
【選択図】図3
Description

Claims (9)
- 磁気的に分離された複数の磁性要素が所定の配列周期で配列されたトラックを有する磁気ディスクと、
前記トラックに追従し、データの書き込み及び読み出しを行う磁気ヘッドと、
前記磁性要素の配列周期に対応する周期のライトクロックに基づいて記録信号を生成し、前記磁気ヘッドに出力する信号処理部と、
前記トラックのうち前記磁気ヘッドによりデータが書き込まれる範囲を含んだ所定範囲の終点に前記磁気ヘッドが達したときの前記ライトクロックの位相を検出する位相検出部と、
前記所定範囲の終点に前記磁気ヘッドが達したときの前記ライトクロックの位相の予想値と検出値との差分に基づいて、データの書き込みの成否を判定する判定処理部と、
を備える磁気ディスク装置。 - 前記位相検出部は、前記所定範囲の始点および終点のそれぞれに前記磁気ヘッドが達したときの前記ライトクロックの位相を検出し、
前記判定処理部は、前記所定範囲の始点に前記磁気ヘッドが達したときの前記ライトクロックの位相の検出値に基づいて前記予想値を求める、
請求項1に記載の磁気ディスク装置。 - 前記判定処理部は、前記所定範囲の始点に前記磁気ヘッドが達したときの前記ライトクロックの位相の検出値、前記所定範囲の長さ、及び前記磁性要素の配列周期に基づいて前記予想値を求める、
請求項2に記載の磁気ディスク装置。 - 前記所定範囲を前記磁気ヘッドが通過する期間の前記ライトクロック又はこれに対応するクロックの数を計数する計数処理部を更に備え、
前記判定処理部は、前記計数されたライトクロック又はこれに対応するクロックの数に基づいて、データの書き込みの成否を判定する、
請求項1に記載の磁気ディスク装置。 - 前記所定範囲を前記磁気ヘッドが通過する時間間隔を検出する時間検出部を更に備え、
前記判定処理部は、前記検出された時間間隔に基づいて、データの書き込みの成否を判定する、
請求項1に記載の磁気ディスク装置。 - 前記判定処理部は、データの書き込みが失敗であると判定した場合に再度の書き込みを指示する、
請求項1に記載の磁気ディスク装置。 - 磁気的に分離された複数の磁性要素が所定の配列周期で配列されたトラックを有する磁気ディスクと、
前記トラックに追従し、データの書き込み及び読み出しを行う磁気ヘッドと、
前記磁性要素の配列周期に対応する周期のライトクロックに基づいて記録信号を生成し、前記磁気ヘッドに出力する信号処理部と、
前記トラックのうち前記磁気ヘッドによりデータが書き込まれる範囲を含んだ所定範囲を前記磁気ヘッドが通過する時間間隔を検出する時間検出部と、
前記所定範囲を前記磁気ヘッドが通過する時間間隔の予想値と検出値との差分に基づいて、前記磁気ヘッドによるデータの書き込みの成否を判定する判定処理部と、
を備える磁気ディスク装置。 - 前記判定処理部は、前記所定範囲の長さ、及び前記トラックに対する前記磁気ヘッドの追従速度に基づいて前記予想値を求める、
請求項7に記載の磁気ディスク装置。 - 磁気的に分離された複数の磁性要素が所定の配列周期で配列されたトラックを有する磁気ディスクと、
前記トラックに追従し、データの書き込み及び読み出しを行う磁気ヘッドと、
前記磁性要素の配列周期に対応する周期のライトクロックに基づいて記録信号を生成し、前記磁気ヘッドに出力する信号処理部と、
を備える磁気ディスク装置の制御方法であって、
前記トラックのうち前記磁気ヘッドによりデータが書き込まれる範囲を含んだ所定範囲の終点に前記磁気ヘッドが達したときの前記ライトクロックの位相を検出し、
前記所定範囲の終点に前記磁気ヘッドが達したときの前記ライトクロックの位相の予想値と検出値との差分に基づいて、前記磁気ヘッドによるデータの書き込みの成否を判定する、
ことを特徴とする磁気ディスク装置の制御方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008186714A JP5313576B2 (ja) | 2008-07-18 | 2008-07-18 | 磁気ディスク装置及びその制御方法 |
| US12/505,085 US8107180B2 (en) | 2008-07-18 | 2009-07-17 | Hard-disk drive and control method for magnetic recording on a patterned medium of the hard-disk drive |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008186714A JP5313576B2 (ja) | 2008-07-18 | 2008-07-18 | 磁気ディスク装置及びその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010027138A true JP2010027138A (ja) | 2010-02-04 |
| JP5313576B2 JP5313576B2 (ja) | 2013-10-09 |
Family
ID=41732822
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008186714A Expired - Fee Related JP5313576B2 (ja) | 2008-07-18 | 2008-07-18 | 磁気ディスク装置及びその制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8107180B2 (ja) |
| JP (1) | JP5313576B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012160221A (ja) * | 2011-01-31 | 2012-08-23 | Hitachi High-Technologies Corp | パターンドメディアの検査方法および検査装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5550594B2 (ja) * | 2011-03-30 | 2014-07-16 | 株式会社東芝 | 磁気ヘッド |
| US8625222B2 (en) | 2012-02-03 | 2014-01-07 | Lsi Corporation | Storage device having calibration circuitry providing programmable phase update values |
| US8804280B2 (en) * | 2012-02-03 | 2014-08-12 | Seagate Technology Llc | Actively synchronizing magnetic responses of a shield and a write pole |
| US8873201B2 (en) | 2012-02-03 | 2014-10-28 | Seagate Technology Llc | Low-recess write pole coil near shield at media-facing surface |
| US8605379B1 (en) * | 2012-09-19 | 2013-12-10 | Western Digital Technologies, Inc. | Disk drive averaging phase-offset due to reader/writer gap in order to recover extended servo data |
| US9159349B2 (en) | 2013-08-28 | 2015-10-13 | Seagate Technology Llc | Writer core incorporating thermal sensor having a temperature coefficient of resistance |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10144009A (ja) * | 1996-11-11 | 1998-05-29 | Nippon Conlux Co Ltd | 光メモリカードのデータ記録方法および装置 |
| JP2003157507A (ja) * | 2001-11-16 | 2003-05-30 | Fuji Electric Co Ltd | 磁気記録媒体、ディスク状磁気記録媒体の記録再生方法、記録装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4365520B2 (ja) | 2000-09-29 | 2009-11-18 | Tdk株式会社 | 磁気記録媒体および磁気記録再生方式 |
| JP3699925B2 (ja) | 2001-11-22 | 2005-09-28 | 株式会社東芝 | 記録読み出し装置および記録読み出し方法 |
| US7675703B2 (en) * | 2007-06-08 | 2010-03-09 | Hitachi Global Storage Technologies Netherlands B.V. | Magnetic recording disk drive with patterned media and system for clocking write data |
-
2008
- 2008-07-18 JP JP2008186714A patent/JP5313576B2/ja not_active Expired - Fee Related
-
2009
- 2009-07-17 US US12/505,085 patent/US8107180B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10144009A (ja) * | 1996-11-11 | 1998-05-29 | Nippon Conlux Co Ltd | 光メモリカードのデータ記録方法および装置 |
| JP2003157507A (ja) * | 2001-11-16 | 2003-05-30 | Fuji Electric Co Ltd | 磁気記録媒体、ディスク状磁気記録媒体の記録再生方法、記録装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012160221A (ja) * | 2011-01-31 | 2012-08-23 | Hitachi High-Technologies Corp | パターンドメディアの検査方法および検査装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5313576B2 (ja) | 2013-10-09 |
| US8107180B2 (en) | 2012-01-31 |
| US20110058274A1 (en) | 2011-03-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6490111B1 (en) | Method and apparatus for refreshing servo patterns in a disc drive | |
| JP5313576B2 (ja) | 磁気ディスク装置及びその制御方法 | |
| US7256956B2 (en) | Propagation self servowrite using self-written spiral signals for in-process calibration | |
| US7889450B2 (en) | Reduced read/write transition overhead for storage media | |
| US20070097540A1 (en) | Disk drive having a disk medium with discrete track | |
| US20070121235A1 (en) | Magnetic disk drive, method for registering defective sector, and method for controlling flying height | |
| KR100712559B1 (ko) | 기준 클럭 주파수 조정 방법 및 장치와 이를 이용한 디스크드라이브 | |
| JP2005222689A (ja) | サーボタイミングジッタ補償方法及びサーボタイミングジッタ補償装置 | |
| JP5548993B2 (ja) | 磁気記録再生装置及び磁気記録媒体 | |
| US7570446B2 (en) | Disk drive with improved format efficiency and control method thereof | |
| US7035035B2 (en) | Method of and apparatus for correcting data recording position on recording medium | |
| KR100975328B1 (ko) | 클록 생성 장치, 자기 디스크 장치 및 라이트 동기 방법 | |
| US8792194B2 (en) | Recording reproducing apparatus and magnetic recording medium | |
| US8711507B1 (en) | Gate timing for short servo wedge in disk memory systems | |
| JP5064661B2 (ja) | セクタパルスのタイミング制御方法,サーボゲートパルスのタイミング制御方法およびディスクドライブ | |
| JP4331236B2 (ja) | ディスク記憶装置 | |
| JP4154377B2 (ja) | 磁気ディスク装置、並びにそのデータトラックピッチ決定方法及びセルフサーボライト方法 | |
| US20050141124A1 (en) | Systems and methods for conditional servowriting | |
| JP2009295220A (ja) | 位相調整装置、磁気記憶媒体及び記憶装置 | |
| JP2010118129A (ja) | 情報記憶装置および制御回路 | |
| JP4232734B2 (ja) | サーボ信号の周波数変調装置、周波数変調方法及び磁気記録装置 | |
| JP2008065935A (ja) | ディスク記録媒体および情報記録装置 | |
| JP3904999B2 (ja) | ディスク装置及びその制御方法 | |
| JP2003045133A (ja) | 垂直磁気記録方式のサーボライト方法及び磁気ディスク装置 | |
| US20080074777A1 (en) | Magnetic Recorder/Reproducer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110617 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120724 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121015 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130604 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130704 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5313576 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |