JP2009236492A - 車両用障害物監視装置 - Google Patents
車両用障害物監視装置 Download PDFInfo
- Publication number
- JP2009236492A JP2009236492A JP2008079063A JP2008079063A JP2009236492A JP 2009236492 A JP2009236492 A JP 2009236492A JP 2008079063 A JP2008079063 A JP 2008079063A JP 2008079063 A JP2008079063 A JP 2008079063A JP 2009236492 A JP2009236492 A JP 2009236492A
- Authority
- JP
- Japan
- Prior art keywords
- obstacle
- vehicle
- range
- ultrasonic sensor
- relative
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Traffic Control Systems (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
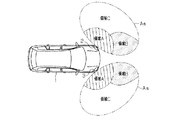
【解決手段】車両用障害物監視装置は、超音波センサ2,3を通じて車両1周辺の障害物と車両1との相対距離及び相対角度から相対位置を検知する。車両用障害物監視装置は、超音波センサ2,3が障害物を検知することができる検知範囲内において障害物の存在を報知部12により運転者に報知する所望の報知範囲を設定し、検知した車両1に対する障害物の相対位置が同報知範囲内にある場合には障害物の存在を報知部12により運転者に報知する。
【選択図】図1
Description
従来の車両用障害物監視装置は、車両周辺の近距離を主たる検知範囲とする短距離センサと、近距離、中距離、遠距離を主たる検知範囲とする長距離センサとを備え、これらセンサのそれぞれの検知範囲を組み合わせて障害物を検知したい検知範囲を形成していた(例えば、特許文献1参照。)。
請求項1に記載の発明は、車両周辺の障害物と同車両との相対距離及び相対角度から同車両に対する障害物の相対位置を検知する障害物検知手段と、前記障害物の存在を運転者に報知する報知手段と、前記障害物検知手段が障害物を検知することができる検知範囲内において障害物の存在を前記報知手段により運転者に報知する報知範囲及び報知しない非報知範囲を設定し、前記障害物検知手段が検知した車両に対する障害物の相対位置が同報知範囲内にある場合には障害物の存在を前記報知手段により運転者に報知する制御手段とを備えることを特徴とする車両用障害物監視装置であることをその要旨としている。
<全体構成>
図1に示されるように、車両用障害物監視装置は、車両1周辺の障害物を検知するために超音波を送受信する左側超音波センサ2及び右側超音波センサ3と、左側超音波センサ2及び右側超音波センサ3からの検知結果に基づき各種演算を行う制御装置4とを備えている。また、車両用障害物監視装置は、車両1の種々の情報を検出して、制御装置4へ出力する車両情報出力部5と、運転者に障害物の存在を報知する報知手段としての報知部12とを備えている。ここで、障害物検知手段は、左側超音波センサ2及び右側超音波センサ3と、制御装置4とからなる。
次に、左側超音波センサ2及び右側超音波センサ3による障害物の検知方法について図3及び図4を参照して説明する。ここでは左側超音波センサ2について説明し、右側超音波センサ3については対応する部材名称及び符号等を括弧書きとする。
次に、車両用周辺監視装置による報知範囲の判定方法について図5及び図6を参照して説明する。
次に、前述のように構成された車両用障害物監視装置の処理手順について図7のフローチャートを参照して説明する。
制御部7は、ステップS5において算出した相対位置P、即ち障害物の相対距離Lと相対角度θとから判断マップに基づいて障害物が領域A、領域B、及び領域Cのいずれに該当するか判定する領域判定処理を行う(ステップS6)。例えば、障害物の相対位置Pが図5に白丸印で示される位置とすると、センサ中心Osに対する障害物の相対位置Pの相対距離LがL1とL11との間であり、同じく相対角度θがθ1より大きいため、図6の判断マップに示される条件(3)に該当する。そのため、制御部7は判断マップに基づいて領域Bと判定する。
以上により、車両用障害物監視装置は、障害物の存在を運転者に報知する。以後、制御部7は所定の制御周期で当該処理を繰り返す。
(1)車両1周辺の障害物と車両1との相対距離L及び相対角度θから車両1に対する障害物の相対位置Pを検知するため、障害物との相対距離だけでなく、相対角度を加味することにより障害物の車両1に対する相対位置Pを正確に把握することができる。そして、左側超音波センサ2及び右側超音波センサ3が障害物を検知することができる検知範囲As内において障害物の存在を運転者に報知する報知範囲(領域A及び領域B)を設定した。このため、検知された障害物の相対位置P、即ち相対距離L及び相対角度θに基づいて障害物が領域A、領域B、領域Cのいずれの領域に存在するかを判断し、この判断結果に基づき障害物の存在を報知することができる。よって、障害物の存在を運転者に報知する所望の報知範囲を形成することができる。また、障害物を検知したい範囲は車種毎に異なるため、従来では所望の報知範囲となるように車種毎に超音波センサの検知範囲を変更しなければならなかったが、本実施形態では検知範囲As内において障害物の存在を報知する領域A、領域B、領域Cを設定することによって検知範囲を変更することなく容易に変更することができる。
・上記実施形態では、一例として超音波センサ2,3の検知範囲As内における報知範囲を領域A、領域B、領域Cと設定したが、これに限らず報知したい範囲に合わせて、異なる領域を設定してもよい。
・上記実施形態では、超音波センサを用いたが、電磁波センサ等の他のセンサを用いるようにしてもよい。
Claims (5)
- 車両周辺の障害物と同車両との相対距離及び相対角度から同車両に対する障害物の相対位置を検知する障害物検知手段と、
前記障害物の存在を運転者に報知する報知手段と、
前記障害物検知手段が障害物を検知することができる検知範囲内において障害物の存在を前記報知手段により運転者に報知する報知範囲及び報知しない非報知範囲を設定し、前記障害物検知手段が検知した車両に対する障害物の相対位置が同報知範囲内にある場合には障害物の存在を前記報知手段により運転者に報知する制御手段とを備える
ことを特徴とする車両用障害物監視装置。 - 請求項1に記載の車両用障害物監視装置において、
前記障害物検知手段は、送受信兼用の第1超音波センサと、受信専用の第2超音波センサとが離間して配置され、同第1超音波センサから送信された超音波の障害物からの反射波を同第1超音波センサ及び同第2超音波センサにより受信して、同反射波に基づき障害物と車両との相対距離及び相対角度を算出し、同車両に対する障害物の相対位置を検知する
ことを特徴とする車両用障害物監視装置。 - 請求項1又は2に記載の車両用障害物監視装置において、
前記制御手段は、前記障害物の相対距離が所定範囲にあるか否かの判断と、前記障害物の相対角度が所定範囲にあるか否かの判断とを組み合わせることによって前記障害物の相対位置が前記報知範囲内にあるか否かを判断する
ことを特徴とする車両用障害物監視装置。 - 請求項1〜3のいずれか一項に記載の車両用障害物監視装置において、
前記制御手段は、操舵角を検出する操舵角検出手段から取得される操舵角に基づいて前記検知範囲内における前記報知範囲を同操舵角に応じて変更する
ことを特徴とする車両用障害物監視装置。 - 請求項1〜4のいずれか一項に記載の車両用障害物監視装置において、
前記制御手段は、シフト位置を検出するシフト位置検出手段から取得される前進又は後進の情報に基づいて前記検知範囲内における前記報知範囲を同シフト位置に応じて変更する
ことを特徴とする車両用障害物監視装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008079063A JP2009236492A (ja) | 2008-03-25 | 2008-03-25 | 車両用障害物監視装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008079063A JP2009236492A (ja) | 2008-03-25 | 2008-03-25 | 車両用障害物監視装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009236492A true JP2009236492A (ja) | 2009-10-15 |
Family
ID=41250645
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008079063A Pending JP2009236492A (ja) | 2008-03-25 | 2008-03-25 | 車両用障害物監視装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009236492A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012146146A (ja) * | 2011-01-12 | 2012-08-02 | Denso It Laboratory Inc | 移動物体検出装置 |
| CN110023784A (zh) * | 2016-12-05 | 2019-07-16 | 株式会社电装 | 障碍物检测装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01119900A (ja) * | 1987-11-02 | 1989-05-11 | Alpine Electron Inc | 障害警告方式 |
| JPH11304910A (ja) * | 1998-04-16 | 1999-11-05 | Mazda Motor Corp | 車両用障害物検出装置及び障害物検出用トランスデューサの配置方法 |
| JP2000187075A (ja) * | 1998-12-22 | 2000-07-04 | Matsushita Electric Works Ltd | 車両用障害物表示装置 |
| JP2003215241A (ja) * | 2002-01-28 | 2003-07-30 | Matsushita Electric Works Ltd | 車載用レーダ装置 |
| JP2004352176A (ja) * | 2003-05-30 | 2004-12-16 | Suzuki Motor Corp | 車両用警報システム及び車両用警報発生方法 |
-
2008
- 2008-03-25 JP JP2008079063A patent/JP2009236492A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01119900A (ja) * | 1987-11-02 | 1989-05-11 | Alpine Electron Inc | 障害警告方式 |
| JPH11304910A (ja) * | 1998-04-16 | 1999-11-05 | Mazda Motor Corp | 車両用障害物検出装置及び障害物検出用トランスデューサの配置方法 |
| JP2000187075A (ja) * | 1998-12-22 | 2000-07-04 | Matsushita Electric Works Ltd | 車両用障害物表示装置 |
| JP2003215241A (ja) * | 2002-01-28 | 2003-07-30 | Matsushita Electric Works Ltd | 車載用レーダ装置 |
| JP2004352176A (ja) * | 2003-05-30 | 2004-12-16 | Suzuki Motor Corp | 車両用警報システム及び車両用警報発生方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012146146A (ja) * | 2011-01-12 | 2012-08-02 | Denso It Laboratory Inc | 移動物体検出装置 |
| CN110023784A (zh) * | 2016-12-05 | 2019-07-16 | 株式会社电装 | 障碍物检测装置 |
| CN110023784B (zh) * | 2016-12-05 | 2023-04-04 | 株式会社电装 | 障碍物检测装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4706711B2 (ja) | 駐車空間監視装置 | |
| JP6625228B2 (ja) | 駐車支援装置 | |
| JP6474228B2 (ja) | 物体検知装置 | |
| JP5857900B2 (ja) | 駐車支援装置 | |
| JP6404679B2 (ja) | 物体検知装置 | |
| JP6430777B2 (ja) | 物体検知装置 | |
| JPWO2014091858A1 (ja) | 駐車スペース検出装置 | |
| JP2015004562A (ja) | 障害物検知装置 | |
| US10451734B2 (en) | Object detecting apparatus | |
| US11052907B2 (en) | Parking control device and parking control method | |
| JP2008039497A (ja) | 障害物検出装置 | |
| JP2011034297A (ja) | 駐車空間認識装置 | |
| JP2008195293A (ja) | 衝突予測装置 | |
| WO2003064215A1 (fr) | Systeme d'alarme et de detection d'obstacles pour vehicule | |
| JP5918597B2 (ja) | 駐車空間検知装置 | |
| JP6442225B2 (ja) | 物体検知装置 | |
| JP4971227B2 (ja) | 車両用障害物監視装置 | |
| JP6697281B2 (ja) | 物体検知装置 | |
| JP2015191441A (ja) | 衝突判定装置 | |
| JPWO2017170979A1 (ja) | 監視装置および監視方法 | |
| JP5906432B2 (ja) | 超音波センサシステム | |
| JP5055169B2 (ja) | 車両用走行安全装置 | |
| JP2008006932A (ja) | 運転支援装置およびプログラム | |
| JP2009236492A (ja) | 車両用障害物監視装置 | |
| JP6953166B2 (ja) | 電動車両の自動走行制御装置および自動走行制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100506 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20120111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120726 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120828 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121128 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130402 |