JP2009145305A - 回転位置検出装置 - Google Patents
回転位置検出装置 Download PDFInfo
- Publication number
- JP2009145305A JP2009145305A JP2007325920A JP2007325920A JP2009145305A JP 2009145305 A JP2009145305 A JP 2009145305A JP 2007325920 A JP2007325920 A JP 2007325920A JP 2007325920 A JP2007325920 A JP 2007325920A JP 2009145305 A JP2009145305 A JP 2009145305A
- Authority
- JP
- Japan
- Prior art keywords
- angle
- rotational position
- theta
- wave signal
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Abstract
【課題】比較的簡素な構成で、安価に、モータの回転位置を高精度に検出可能な回転位置検出装置を提供する。
【解決手段】回転位置検出装置1は、電気角θEに伴って変化する正弦波信号sinθE及び余弦波信号cosθEに基づいて、電気角θEのとり得る全角度範囲を45°刻みの8個の角度区分に分割するとともに、モータ角度θEの属する角度区分を判定する区分判定部5と、正弦波信号sinθE及び余弦波信号cosθEに基づいて、0≦R<1の範囲の変数Rを計算する変数演算部6と、角度区分“1”の関係“θT=tan−1R”を用いて、変数Rに対応する0≦θC<45°の範囲の圧縮角度信号θCを求める圧縮角度信号生成部7と、角度区分毎に予め定められた計算式に基づいて圧縮角度信号θCを復元し、0≦θD<360°の範囲の検出角信号θDを生成する角度復元部9と、を備える。
【選択図】図2
【解決手段】回転位置検出装置1は、電気角θEに伴って変化する正弦波信号sinθE及び余弦波信号cosθEに基づいて、電気角θEのとり得る全角度範囲を45°刻みの8個の角度区分に分割するとともに、モータ角度θEの属する角度区分を判定する区分判定部5と、正弦波信号sinθE及び余弦波信号cosθEに基づいて、0≦R<1の範囲の変数Rを計算する変数演算部6と、角度区分“1”の関係“θT=tan−1R”を用いて、変数Rに対応する0≦θC<45°の範囲の圧縮角度信号θCを求める圧縮角度信号生成部7と、角度区分毎に予め定められた計算式に基づいて圧縮角度信号θCを復元し、0≦θD<360°の範囲の検出角信号θDを生成する角度復元部9と、を備える。
【選択図】図2
Description
本発明は、モータに備えられた一対の磁電変換素子から出力される正弦波信号及び余弦波信号を用いて、モータの回転位置を検出する回転位置検出装置に関する。
一般に、モータを用いた被駆動対象の位置制御では、モータの回転位置を検出し、その検出結果に応じたフィードバック制御が行われている。この位置制御を正確に行うためには、回転位置の検出精度を向上させることが極めて重要である。
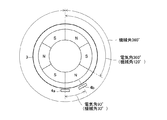
なお、周知のように、モータの回転位置は「機械角」及び「電気角」を用いて表現することができるが、本明細書では、特に断りのない限り「電気角θE」で回転位置を表現するものとする。機械角と電気角の関係は、図9に示す通りである。例えば、6極のモータ3において、固定子に対して回転子が一回転(=機械角360°)すると、電気角は1080°変化する。また、電気角360°は機械角120°に相当する。
なお、周知のように、モータの回転位置は「機械角」及び「電気角」を用いて表現することができるが、本明細書では、特に断りのない限り「電気角θE」で回転位置を表現するものとする。機械角と電気角の関係は、図9に示す通りである。例えば、6極のモータ3において、固定子に対して回転子が一回転(=機械角360°)すると、電気角は1080°変化する。また、電気角360°は機械角120°に相当する。
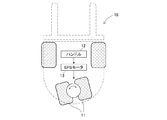
上記位置制御が行われている一例として、図8に示す荷役車両10では、搭乗者によってハンドル12が操作され、その操作量に応じた指令値(電気信号)がEPSモータ13に入力される。そして、EPSモータ13の回転動作によって操舵輪11の角度が制御され、荷役車両10の進行方向が決定される。
この荷役車両10において、EPSモータ13の回転位置が正確に検出できないとすると、ハンドル12の操作量と操舵輪11の角度との関係にズレが生じたり、EPSモータ13の不自然なトルク変動によって、搭乗者の乗り心地が悪化したりする。荷役車両に限らず、他の走行車両についても同様である。
この荷役車両10において、EPSモータ13の回転位置が正確に検出できないとすると、ハンドル12の操作量と操舵輪11の角度との関係にズレが生じたり、EPSモータ13の不自然なトルク変動によって、搭乗者の乗り心地が悪化したりする。荷役車両に限らず、他の走行車両についても同様である。
そこで、従来から、モータの回転位置を高精度に検出するための種々の検討がなされている。例えば、特許文献1に記載されている位置制御モータ装置では、電気角を90°ずらした一対のホール素子(4a、4b)がモータ3の近傍に配置され(図9参照)、電気角θEに応じて変化する正弦波信号sinθE及び余弦波信号cosθEが得られるようになっている。
そして、0°≦θE<45°、135°≦θE<225°、315°≦θE<360°の範囲の正弦波信号sinθE、及び45°≦θE<135°、225°≦θE<315°の範囲の余弦波信号cosθEを繋ぎ合わせ、これを直線として取り扱うことによって、電気角θEに応じた検出信号が生成されるようになっている。
特開平4−208090号公報
そして、0°≦θE<45°、135°≦θE<225°、315°≦θE<360°の範囲の正弦波信号sinθE、及び45°≦θE<135°、225°≦θE<315°の範囲の余弦波信号cosθEを繋ぎ合わせ、これを直線として取り扱うことによって、電気角θEに応じた検出信号が生成されるようになっている。
しかしながら、上記範囲の正弦波信号sinθE及び余弦波信号cosθEは厳密には直線ではないので、生成された検出信号によってモータの回転位置を高精度に検出することはできなかった(特許文献1の図3参照)。
したがって、この位置制御モータ装置における手法を図8に示す荷役車両10に適用したとしても、やはり、ハンドル12の操作量と操舵輪11の角度との関係にズレが生じたり、EPSモータ13の不自然なトルク変動によって、搭乗者の乗り心地が悪化したりする場合があった。
したがって、この位置制御モータ装置における手法を図8に示す荷役車両10に適用したとしても、やはり、ハンドル12の操作量と操舵輪11の角度との関係にズレが生じたり、EPSモータ13の不自然なトルク変動によって、搭乗者の乗り心地が悪化したりする場合があった。
そこで本発明は、比較的簡素な構成で、安価に、モータの回転位置を高精度に検出可能な回転位置検出装置を提供することを課題とする。
上記課題を解決するために、本発明に係る回転位置検出装置は、
固定子に対する回転子の相対的な回転位置に応じて電気角θEが変化するモータに一対の磁電変換器が備えられ、前記磁電変換器から出力される正弦波信号sinθE及び余弦波信号cosθEに基づいて前記回転位置を検出する回転位置検出装置であって、i)前記正弦波信号sinθE及び前記余弦波信号cosθEが正であるか否か、及び前記正弦波信号sinθEの絶対値と前記余弦波信号cosθEの絶対値との大小関係に基づいて、前記電気角θEのとり得る全角度範囲を45°刻みの複数の角度区分に分割するとともに、前記電気角θEの属する前記角度区分を判定する角度区分判定部と、ii)前記正弦波信号sinθEの絶対値及び前記余弦波信号cosθEの絶対値のうち、小さい方を大きい方で割る除算を行って、0≦R<1の範囲の変数Rを計算する変数演算部と、iii)式“θC=tan−1R”の関係を用いて、0≦θC<45°の範囲に圧縮された圧縮角度信号θCを求める圧縮角度信号生成部と、iv)前記角度区分毎に予め定められた計算式に基づいて、前記圧縮角度信号θCを前記電気角θEのとり得る全角度範囲に復元し、検出角度信号θDを生成する角度復元部と、を備えたことを特徴とする。
固定子に対する回転子の相対的な回転位置に応じて電気角θEが変化するモータに一対の磁電変換器が備えられ、前記磁電変換器から出力される正弦波信号sinθE及び余弦波信号cosθEに基づいて前記回転位置を検出する回転位置検出装置であって、i)前記正弦波信号sinθE及び前記余弦波信号cosθEが正であるか否か、及び前記正弦波信号sinθEの絶対値と前記余弦波信号cosθEの絶対値との大小関係に基づいて、前記電気角θEのとり得る全角度範囲を45°刻みの複数の角度区分に分割するとともに、前記電気角θEの属する前記角度区分を判定する角度区分判定部と、ii)前記正弦波信号sinθEの絶対値及び前記余弦波信号cosθEの絶対値のうち、小さい方を大きい方で割る除算を行って、0≦R<1の範囲の変数Rを計算する変数演算部と、iii)式“θC=tan−1R”の関係を用いて、0≦θC<45°の範囲に圧縮された圧縮角度信号θCを求める圧縮角度信号生成部と、iv)前記角度区分毎に予め定められた計算式に基づいて、前記圧縮角度信号θCを前記電気角θEのとり得る全角度範囲に復元し、検出角度信号θDを生成する角度復元部と、を備えたことを特徴とする。
好ましくは、前記変数Rの計算式が、前記角度区分毎に予め決定されている。
さらに好ましくは、本発明に係る回転位置検出装置は、v)前記変数Rと前記圧縮角度信号θCの関係を保持するマップと、をさらに備え、前記圧縮角度信号θCを求める度に、式“θC=tan−1R”の計算を行うことなく、前記圧縮角度信号θCを求めることができる。
また、上記課題を解決するために、本発明に係る走行車両は、
i)上記いずれかの回転位置検出装置と、ii)前記回転位置検出装置によって、固定子と回転子の相対回転位置に応じて変化する電気角θEが検出されるEPSモータと、iii)前記EPSモータによって制御される操舵輪と、iv)前記EPSモータを駆動するモータドライバと、を備え、前記モータドライバは、前記回転位置検出装置から出力される検出角度信号θDを参照しつつ、前記EPSモータを駆動する。
i)上記いずれかの回転位置検出装置と、ii)前記回転位置検出装置によって、固定子と回転子の相対回転位置に応じて変化する電気角θEが検出されるEPSモータと、iii)前記EPSモータによって制御される操舵輪と、iv)前記EPSモータを駆動するモータドライバと、を備え、前記モータドライバは、前記回転位置検出装置から出力される検出角度信号θDを参照しつつ、前記EPSモータを駆動する。
本発明によれば、比較的簡素な構成で、安価に、モータの回転位置を高精度に検出可能な回転位置検出装置を提供することができる。
はじめに、本発明に係る回転位置検出装置の基本概念について説明する。なお、以下では、6極モータの回転位置を検出する場合について説明する。
[基本概念]
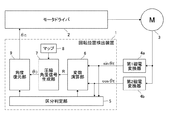
図2に示すように、本発明に係る回転位置検出装置1は、第1磁電変換器4aから出力される正弦波信号sinθEと、第2磁電変換器4aから出力される余弦波信号cosθEとに基づいてモータ3の回転位置、すなわち電気角θEを検出するものである。第1磁電変換器4a及び第2磁電変換器4bは、互いに電気角を90°(=機械角30°)ずらした状態でモータ3の近傍、または内部に備えられる(図9参照)。
図2に示すように、本発明に係る回転位置検出装置1は、第1磁電変換器4aから出力される正弦波信号sinθEと、第2磁電変換器4aから出力される余弦波信号cosθEとに基づいてモータ3の回転位置、すなわち電気角θEを検出するものである。第1磁電変換器4a及び第2磁電変換器4bは、互いに電気角を90°(=機械角30°)ずらした状態でモータ3の近傍、または内部に備えられる(図9参照)。
正弦波信号sinθE及び余弦波信号cosθEという2つの信号に基づいて電気角θEを求めるためには、例えば、“sinθE/cosθE”のような計算を行って2つの信号をひとまとめにする必要がある。図1(A)は、式“sinθE/cosθE”を用いてtanθEを計算し、電気角θEを求めようとするものであるが、これには以下の問題点があった。
すなわち、図1(A)に示す方法によれば、例えば、tanθE=0の場合に、電気角θEは0°であるのか180°であるのかを特定することができない(第1の問題)。また、電気角θE=90°、270°の漸近線付近では、tanθEが極端に大きく、または小さくなり、計算に支障が生じる(第2の問題)。
すなわち、図1(A)に示す方法によれば、例えば、tanθE=0の場合に、電気角θEは0°であるのか180°であるのかを特定することができない(第1の問題)。また、電気角θE=90°、270°の漸近線付近では、tanθEが極端に大きく、または小さくなり、計算に支障が生じる(第2の問題)。
そこで、本発明に係る回転位置検出装置では、電気角θEのとり得る全角度範囲を45°刻みの8個の角度区分に分割し、図1(B)に示す電気角θEと正弦波信号sinθE及び余弦波信号cosθEとの関係から、検出すべき電気角θEが属している角度区分を判定する。図1(B)から明らかなように、角度区分の判定は、(1)正弦波信号sinθEの正負、(2)余弦波信号cosθEの正負、及び(3)正弦波信号sinθEと余弦波信号cosθEの絶対値の大小関係、を判定して行うことができる。
例えば、|cosθE|>|sinθE|、sinθE>0、cosθE>0の場合、角度区分は“1”である。また、|sinθE|>|cosθE|、sinθE<0、cosθE<0の場合の角度区分は“6”である。
角度区分を判定することにより、第1の問題が解消できる。
例えば、|cosθE|>|sinθE|、sinθE>0、cosθE>0の場合、角度区分は“1”である。また、|sinθE|>|cosθE|、sinθE<0、cosθE<0の場合の角度区分は“6”である。
角度区分を判定することにより、第1の問題が解消できる。
また、本発明に係る回転位置検出装置では、第2の問題が起こりえない領域、すなわち、角度区分“1”のtanθEと電気角θEの関係を用いて、全ての角度区分における電気角θEの特定を行うことを特徴とする。
具体的には、図1(A)に示すように、角度区分“1”におけるtanθEは0以上で、かつ1未満の値しかとり得ないので、この範囲に収まる変数を正弦波信号sinθEと余弦波信号cosθEとから生成する必要がある。本発明では、この変数を“変数R”とし、正弦波信号sinθEの絶対値及び余弦波信号cosθEの絶対値のうち、小さい方を大きい方で割る除算によって計算する。
そして、角度区分“1”の関係“θC=tan−1R”を用いて、変数Rに対応する圧縮角度信号θCを求める。
具体的には、図1(A)に示すように、角度区分“1”におけるtanθEは0以上で、かつ1未満の値しかとり得ないので、この範囲に収まる変数を正弦波信号sinθEと余弦波信号cosθEとから生成する必要がある。本発明では、この変数を“変数R”とし、正弦波信号sinθEの絶対値及び余弦波信号cosθEの絶対値のうち、小さい方を大きい方で割る除算によって計算する。
そして、角度区分“1”の関係“θC=tan−1R”を用いて、変数Rに対応する圧縮角度信号θCを求める。
しかしながら、変数Rのとり得る値は0≦R<1なので、圧縮角度信号θCのとり得る角度は0≦θC<45°であり、角度区分に関する情報が欠落してしまっている。
そこで、本発明に係る回転位置検出装置では、予め判定されている角度区分に基づいて圧縮角度信号θCを復元し、最終的に、電気角θEに対応する検出角度信号θD(0≦θD<360°)を得ることができる。
そこで、本発明に係る回転位置検出装置では、予め判定されている角度区分に基づいて圧縮角度信号θCを復元し、最終的に、電気角θEに対応する検出角度信号θD(0≦θD<360°)を得ることができる。
[実施形態]
続いて、添付図面を参照して、上記本発明の基本概念を実現するための好ましい実施形態について説明する。
図2は本発明に係る回転位置検出装置の構成を示すブロック図、図3は本発明に係る回転位置検出装置の動作を示すフロー図、図4は本発明に係る回転位置検出装置のステップS2の動作を詳細に示すフロー図、図5は角度区分毎に予め定められた変数Rの計算式、及び圧縮角度信号θCを復元するための計算式を示す表、図6は圧縮角度信号θCを求める際に参照されるマップを示すグラフである。
続いて、添付図面を参照して、上記本発明の基本概念を実現するための好ましい実施形態について説明する。
図2は本発明に係る回転位置検出装置の構成を示すブロック図、図3は本発明に係る回転位置検出装置の動作を示すフロー図、図4は本発明に係る回転位置検出装置のステップS2の動作を詳細に示すフロー図、図5は角度区分毎に予め定められた変数Rの計算式、及び圧縮角度信号θCを復元するための計算式を示す表、図6は圧縮角度信号θCを求める際に参照されるマップを示すグラフである。
図2に示すブロック図おいて、モータドライバ2は主にIGBT等のパワー半導体素子からなり、モータ3に対して指令値を出力する。モータ3は、例えば三相同期モータであり、電圧指令値を受けて回転する。また、モータ3は、回転子とともに回転するセンサ磁石(図示を省略)を備えている。センサ磁石には、モータ3の極数(例えば、6極)に応じた正弦波着磁がなされている。
センサ磁石の近傍には、第1磁電変換器4aと第2磁電変換器4bが備えられ、固定子に対する回転子の相対的な回転位置に応じた磁界の変化が電気信号として出力される。本実施形態において、第1磁電変換器4a及び第2磁電変換器4bは、同一の特性を有するホール素子である。図9に示すように、第1磁電変換器4a及び第2磁電変換器4bは電気角を90°(=機械角30°)ずらした状態で配置されているので、第1磁電変換器4aから出力される電気信号を正弦波信号sinθEとした場合、第2磁電変換器4bから出力される電気信号は余弦波信号cosθEとなる。
通常、第1磁電変換器4a及び第2磁電変換器4bからはアナログ信号が出力されるが、この信号形式は任意に変更することができる。例えば、A/D変換器によってディジタル信号に変換し、ディジタル信号となった正弦波信号sinθE及び余弦波信号cosθEが回転位置検出装置1に入力されるようにしてもよい。
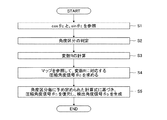
回転位置検出装置1に正弦波信号sinθE及び余弦波信号cosθEが入力されると(図3のステップS1)、まず、区分判定部5において、電気角θEの属する角度区分が判定される(ステップS2)。
図4を参照して、ステップS2では、まず、正弦波信号sinθEが正であるか否かが判定される(ステップS2−1)。正弦波信号sinθEが正の場合、角度区分は“1”〜“4”のいずれかであると判定されたことになる。続いて、余弦波信号cosθEが正であるか否かが判定される(ステップS2−2a)。余弦波信号cosθEも正の場合、角度区分は“1”、“2”のいずれかであると判定されたことになる。
続いて、ステップS2では、余弦波信号cosθEの絶対値が正弦波信号sinθEの絶対値よりも大きいか否かが判定される(ステップS2−3a)。そして、この条件を満たす場合は、角度区分は“1(0≦θE<45°)”であると判定される(ステップS2−4a)。一方、ステップS2−3aの条件を満たさない場合は、角度区分は“2(45≦θE<90°)”であると判定される(ステップS2−4b)。
他の場合も同様に、電気角θEが“3”〜“8”のどの角度区分に属しているのかが判定される。
続いて、ステップS2では、余弦波信号cosθEの絶対値が正弦波信号sinθEの絶対値よりも大きいか否かが判定される(ステップS2−3a)。そして、この条件を満たす場合は、角度区分は“1(0≦θE<45°)”であると判定される(ステップS2−4a)。一方、ステップS2−3aの条件を満たさない場合は、角度区分は“2(45≦θE<90°)”であると判定される(ステップS2−4b)。
他の場合も同様に、電気角θEが“3”〜“8”のどの角度区分に属しているのかが判定される。
結局、図4に示すステップS2では、(1)正弦波信号sinθEが正であるか否か、(2)余弦波信号cosθEが正であるか否か、及び(3)正弦波信号sinθEと余弦波信号cosθEの絶対値の大小関係が順次判定される。そして、この判定結果に基づいて、電気角θEの属する角度区分が判定される。
区分判定部5による角度区分の判定(図3のステップS2)が終了すると、変数演算部6によって変数Rの計算が行われる(ステップS3)。この計算には、第1磁電変換器4aから出力される正弦波信号sinθEと、第2磁電変換器4bから出力される余弦波信号cosθEと、区分判定部5における判定結果とが使用される。
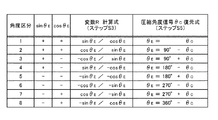
図5に示すように、本実施例における変数Rの計算は、角度区分毎に予め定められた計算式に基づいて行われる。各計算式では、正弦波信号sinθEと余弦波信号cosθEのうち、絶対値の大きい方が分母となり、小さい方が分子となっている。また、正弦波信号sinθE及び余弦波信号cosθEは、適宜、符合“−”を付けて正の値に変換される。これにより、変数Rは、0以上で、かつ1未満であることが保証される。
具体的には、角度区分が“1”の場合、変数Rは式“sinθE/cosθE”で計算される。図1(B)から明らかなように、角度区分“1”では、|cosθE|>|sinθE|、sinθE>0、cosθE>0が成立しているから、変数Rのとり得る値は0≦R<1となる。また、角度区分が“6”の場合、変数Rは式“−cosθE/−sinθE”で計算される。角度区分“6”では、|sinθE|>|cosθE|、sinθE<0、cosθE<0が成立しているから、この場合も変数Rのとり得る値は0≦R<1となる。
変数演算部6による変数Rの計算(図3のステップS3)が終了すると、圧縮角度信号生成部7によって圧縮角度信号θCが求められる(ステップS4)。これには、マップ8と、変数演算部6で計算された変数Rとが使用される。
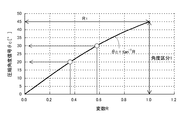
図6に示すように、マップ8には、図1(A)に示す角度区分“1”の変数Rと圧縮角度信号θCの関係“θC=tan−1R”が保持されている。マップ8によれば、変数Rに対応する圧縮角度信号θC(0≦θC<45°)を求めることができる。なお、マップ8を使用せずに、圧縮角度信号θCを求める度に“θC=tan−1R”の計算を行ってもよい。
図6に示すように、マップ8には、図1(A)に示す角度区分“1”の変数Rと圧縮角度信号θCの関係“θC=tan−1R”が保持されている。マップ8によれば、変数Rに対応する圧縮角度信号θC(0≦θC<45°)を求めることができる。なお、マップ8を使用せずに、圧縮角度信号θCを求める度に“θC=tan−1R”の計算を行ってもよい。
具体的には、検出すべき電気角θEが30°(sinθE=0.500、cosθE=0.866)の場合、ステップS2において角度区分は“1”であると判定され、ステップS3において変数R(=sinθE/cosθE)は0.577と計算される。そして、図6のマップより、0.577の変数Rに対応する圧縮角度信号θC(=30°)が求められる。
また、検出すべき電気角θEが60°(sinθE=0.866、cosθE=0.500)の場合、ステップS2において角度区分は“2”であると判定され、ステップS3において変数R(=cosθE/sinθE)は0.577と計算される。そして、図6のマップより、0.577の変数Rに対応する圧縮角度信号θC(=30°)が求められる。すなわち、検出すべき電気角θEが30°と60°の場合では、圧縮角度信号θCはいずれも30°となる。
また、検出すべき電気角θEが60°(sinθE=0.866、cosθE=0.500)の場合、ステップS2において角度区分は“2”であると判定され、ステップS3において変数R(=cosθE/sinθE)は0.577と計算される。そして、図6のマップより、0.577の変数Rに対応する圧縮角度信号θC(=30°)が求められる。すなわち、検出すべき電気角θEが30°と60°の場合では、圧縮角度信号θCはいずれも30°となる。
さらに具体的には、検出すべき電気角θEが110°(sinθE=0.940、cosθE=−0.342)の場合、ステップS2において角度区分は“3”であると判定され、ステップS3において変数R(=−cosθE/sinθE)は0.364と計算される。そして、図6のマップより、0.364の変数Rに対応する圧縮角度信号θC(=20°)が求められる。
また、検出すべき電気角θEが250°(sinθE=−0.940、cosθE=−0.342)の場合、ステップS2において角度区分は“6”であると判定され、ステップS3において変数R(=−cosθE/−sinθE)は0.364と計算される。そして、図6のマップより、0.364の変数Rに対応する圧縮角度信号θC(=20°)が求められる。すなわち、検出すべき電気角θEが110°と250°の場合でも、圧縮角度信号θCはいずれも20°となる。
また、検出すべき電気角θEが250°(sinθE=−0.940、cosθE=−0.342)の場合、ステップS2において角度区分は“6”であると判定され、ステップS3において変数R(=−cosθE/−sinθE)は0.364と計算される。そして、図6のマップより、0.364の変数Rに対応する圧縮角度信号θC(=20°)が求められる。すなわち、検出すべき電気角θEが110°と250°の場合でも、圧縮角度信号θCはいずれも20°となる。
圧縮角度信号θCが求められると、続いて、角度復元部9による圧縮角度信号θCの復元が行われる(図3のステップS5)。この復元は、区分判定部5での判定結果を参照し、角度区分毎に定められている計算式(図5参照)に基づいて行われる。
すなわち、検出すべき電気角θEが60°(角度区分“2”)の場合は式“90−θC”によって復元が行われる。前記の通り、圧縮角度信号θCは30°であるから、結局、検出角度信号θDは60°となる。
また、検出すべき電気角θEが110°(角度区分“3”)の場合は式“90+θC”によって復元が行われる。前記の通り、圧縮角度信号θCは20°であるから、結局、検出角度信号θDは110°となる。
さらに、検出すべき電気角θEが250°(角度区分“6”)の場合は式“270−θC”によって復元が行われる。前記の通り、圧縮角度信号θCは20°であるから、結局、検出角度信号θDは250°となる。
なお、検出すべき電気角θEが30°(角度区分“1”)の場合は、特に復元を行う必要はないので、検出角度信号θDは30°のままである。
また、検出すべき電気角θEが110°(角度区分“3”)の場合は式“90+θC”によって復元が行われる。前記の通り、圧縮角度信号θCは20°であるから、結局、検出角度信号θDは110°となる。
さらに、検出すべき電気角θEが250°(角度区分“6”)の場合は式“270−θC”によって復元が行われる。前記の通り、圧縮角度信号θCは20°であるから、結局、検出角度信号θDは250°となる。
なお、検出すべき電気角θEが30°(角度区分“1”)の場合は、特に復元を行う必要はないので、検出角度信号θDは30°のままである。
図2を参照して、角度復元部9で生成された検出角度信号θDは、モータドライバ2に出力される。そして、モータドライバ2は、目標とするモータ3の電気角θEと検出角度信号θDとを比較して、誤差がある場合は、その誤差を修正するような指令値をモータ3に出力する。
以上のように、本発明に係る回転位置検出装置によれば、正弦波信号sinθE及び余弦波信号cosθEに基づいて、検出すべき電気角θEに対応する検出角度信号θDを得ることができる。また、本発明に係る回転位置検出装置では、図6に示すマップを用いて複雑な計算を省略しているので、高度な演算処理を行う必要がなく、簡素な構成で、しかも安価に電気角θEを検出することができる。
なお、本発明に係る回転位置検出装置は上記構成に限定されるものではなく、種々の変形例が考えられる。
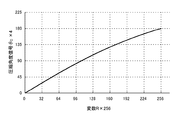
例えば、圧縮角度信号生成部7において取り扱うことのできる値が正の整数に限定される場合は、図7に示すマップを使用することにより、検出精度を向上させることができる。すなわち、図7に示すマップにおいて、横軸は変数Rに“256”を乗じた値であり、縦軸は圧縮角度信号θCに“4”を乗じた値である。これにより、45°を180段階に区切って取り扱うことができるので、0.25°という高い精度で電気角θEを検出することができる。
例えば、圧縮角度信号生成部7において取り扱うことのできる値が正の整数に限定される場合は、図7に示すマップを使用することにより、検出精度を向上させることができる。すなわち、図7に示すマップにおいて、横軸は変数Rに“256”を乗じた値であり、縦軸は圧縮角度信号θCに“4”を乗じた値である。これにより、45°を180段階に区切って取り扱うことができるので、0.25°という高い精度で電気角θEを検出することができる。
また、本発明に係る回転位置検出装置の適用可能範囲は非常に広く、モータの回転位置を検出することが必要な、あらゆる分野に適用することができる。
1 回転位置検出装置
2 モータドライバ
3 モータ
4a 第1磁電変換器
4b 第2磁電変換器
5 区分判定部
6 変数演算部
7 圧縮角度信号生成部
8 マップ
9 角度復元部
10 荷役車両
11 操舵輪
12 ハンドル
13 EPSモータ
R 変数
2 モータドライバ
3 モータ
4a 第1磁電変換器
4b 第2磁電変換器
5 区分判定部
6 変数演算部
7 圧縮角度信号生成部
8 マップ
9 角度復元部
10 荷役車両
11 操舵輪
12 ハンドル
13 EPSモータ
R 変数
Claims (4)
- 固定子に対する回転子の相対的な回転位置に応じて電気角θEが変化するモータに一対の磁電変換器が備えられ、前記磁電変換器から出力される正弦波信号sinθE及び余弦波信号cosθEに基づいて前記回転位置を検出する回転位置検出装置であって、
i)前記正弦波信号sinθE及び前記余弦波信号cosθEが正であるか否か、及び前記正弦波信号sinθEの絶対値と前記余弦波信号cosθEの絶対値との大小関係に基づいて、前記電気角θEのとり得る全角度範囲を45°刻みの複数の角度区分に分割するとともに、前記電気角θEの属する前記角度区分を判定する角度区分判定部と、
ii)前記正弦波信号sinθEの絶対値及び前記余弦波信号cosθEの絶対値のうち、小さい方を大きい方で割る除算を行って、0≦R<1の範囲の変数Rを計算する変数演算部と、
iii)式“θC=tan−1R”の関係を用いて、0≦θC<45°の範囲に圧縮された圧縮角度信号θCを求める圧縮角度信号生成部と、
iv)前記角度区分毎に予め定められた計算式に基づいて、前記圧縮角度信号θCを前記電気角θEのとり得る全角度範囲に復元し、検出角度信号θDを生成する角度復元部と、
を備えたことを特徴とする回転位置検出装置。 - 前記変数Rの計算式が、前記角度区分毎に予め決定されていることを特徴とする請求項1に記載の回転位置検出装置。
- v)前記変数Rと前記圧縮角度信号θCの関係を保持するマップと、
をさらに備え、
前記圧縮角度信号θCを求める度に、式“θC=tan−1R”の計算を行うことなく、前記圧縮角度信号θCを求めることができることを特徴とする請求項1に記載の回転位置検出装置。 - i)請求項1〜3のいずれかに記載の回転位置検出装置と、
ii)前記回転位置検出装置によって、固定子と回転子の相対回転位置に応じて変化する電気角θEが検出されるEPSモータと、
iii)前記EPSモータによって制御される操舵輪と、
iv)前記EPSモータを駆動するモータドライバと、
を備え、
前記モータドライバは、前記回転位置検出装置から出力される検出角度信号θDを参照しつつ、前記EPSモータを駆動することを特徴とする走行車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007325920A JP2009145305A (ja) | 2007-12-18 | 2007-12-18 | 回転位置検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007325920A JP2009145305A (ja) | 2007-12-18 | 2007-12-18 | 回転位置検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009145305A true JP2009145305A (ja) | 2009-07-02 |
Family
ID=40916045
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007325920A Pending JP2009145305A (ja) | 2007-12-18 | 2007-12-18 | 回転位置検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009145305A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8204641B2 (en) | 2009-07-31 | 2012-06-19 | Denso Corporation | Traction motor control apparatus for vehicle |
| US8487563B2 (en) | 2009-11-27 | 2013-07-16 | Denso Corporation | Drive motor control apparatus for vehicle, motor control system, method for correcting rotation angle of motor, program for performing the same, rotation detecting apparatus |
| CN114877922A (zh) * | 2022-06-01 | 2022-08-09 | 大连探索者科技有限公司 | 一种绝对式光电角度传感器译码方法 |
-
2007
- 2007-12-18 JP JP2007325920A patent/JP2009145305A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8204641B2 (en) | 2009-07-31 | 2012-06-19 | Denso Corporation | Traction motor control apparatus for vehicle |
| US8487563B2 (en) | 2009-11-27 | 2013-07-16 | Denso Corporation | Drive motor control apparatus for vehicle, motor control system, method for correcting rotation angle of motor, program for performing the same, rotation detecting apparatus |
| CN114877922A (zh) * | 2022-06-01 | 2022-08-09 | 大连探索者科技有限公司 | 一种绝对式光电角度传感器译码方法 |
| CN114877922B (zh) * | 2022-06-01 | 2024-02-09 | 大连探索者科技有限公司 | 一种绝对式光电角度传感器译码方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2754998B1 (en) | Error frequency component acquisition device, angle of rotation acquisition device, motor control device, and angle of rotation acquisition method | |
| WO2007119701A1 (ja) | 回転角度検出装置 | |
| JP3546817B2 (ja) | 電動機の磁極位置検出装置 | |
| KR20150047536A (ko) | 각 위치 센서들에서의 에러 정정을 위한 시스템 및 방법 | |
| JP6272508B2 (ja) | 位置検出器の角度誤差補正装置および角度誤差補正方法 | |
| CN109502055B (zh) | 控制力矩陀螺外框架的驱动控制系统及方法 | |
| CN105048921A (zh) | 相电流测量诊断 | |
| CN106685302B (zh) | 一种霍尔式位置传感器解码算法及eps控制器 | |
| JP2012050318A (ja) | 交流電動モータ及び制御インバータを備える電源装置、及びこの装置の起電力を測定する方法 | |
| JP2019097257A (ja) | 磁極方向検出装置 | |
| JP2009145305A (ja) | 回転位置検出装置 | |
| JP5673009B2 (ja) | インバータ制御装置および電力変換システム | |
| US20190157995A1 (en) | Magnetic pole direction detection device | |
| JP2016186475A (ja) | 位置予測装置及び位置検出装置 | |
| CN108063576B (zh) | 基于向量的位置感测系统中的误差校正 | |
| JP2013160720A (ja) | 回転角検出装置 | |
| JP2020016439A (ja) | 角度センサの補正装置および角度センサ | |
| JP5396754B2 (ja) | 出力推定装置 | |
| JP5585058B2 (ja) | 回転角検出装置、モータ制御装置、および電動パワーステアリング装置 | |
| JP6717345B2 (ja) | 角度センサの補正装置および角度センサ | |
| JP2018023203A (ja) | 電動機の制御装置 | |
| JP5912242B2 (ja) | インバータ制御装置およびインバータ制御システム | |
| JP2016148587A (ja) | レゾルバ信号処理装置 | |
| EP3961911A1 (en) | Motor control device and electric power steering device | |
| JP6459918B2 (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090327 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090422 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090902 |