JP2009142014A - 超音波モータ - Google Patents
超音波モータ Download PDFInfo
- Publication number
- JP2009142014A JP2009142014A JP2007313880A JP2007313880A JP2009142014A JP 2009142014 A JP2009142014 A JP 2009142014A JP 2007313880 A JP2007313880 A JP 2007313880A JP 2007313880 A JP2007313880 A JP 2007313880A JP 2009142014 A JP2009142014 A JP 2009142014A
- Authority
- JP
- Japan
- Prior art keywords
- piezoelectric element
- holder member
- ultrasonic motor
- sliding contact
- recess
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003825 pressing Methods 0.000 claims abstract description 21
- 230000004308 accommodation Effects 0.000 claims description 20
- 239000000463 material Substances 0.000 claims description 14
- 230000001105 regulatory effect Effects 0.000 claims description 14
- 238000005452 bending Methods 0.000 claims description 9
- 239000011347 resin Substances 0.000 claims description 5
- 229920005989 resin Polymers 0.000 claims description 5
- 239000004020 conductor Substances 0.000 claims description 4
- 239000007769 metal material Substances 0.000 claims description 4
- 230000013011 mating Effects 0.000 claims 1
- 238000004519 manufacturing process Methods 0.000 description 6
- 239000000470 constituent Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 238000005096 rolling process Methods 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 230000006641 stabilisation Effects 0.000 description 2
- 238000011105 stabilization Methods 0.000 description 2
- 238000000265 homogenisation Methods 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
Images


Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/003—Driving devices, e.g. vibrators using longitudinal or radial modes combined with bending modes
- H02N2/004—Rectangular vibrators
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/08—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted to co-operate with a remote control mechanism
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
- Lens Barrels (AREA)
- Adjustment Of Camera Lenses (AREA)
Abstract
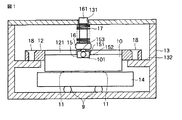
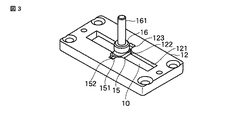
【解決手段】圧電素子10に固着したホルダ部材15に移動方向と直交する方向にそれぞれ係合凸部152を有した湾曲状の摺接突起部151を設け、位置規制部材12に圧電素子10を収容する収容孔121を設けて、この収容部121の内壁面に係合凹部122を有した摺接凹部121を設け、圧電素子10を位置規制部材12の収容孔121に収容すると共に、ホルダ部材15の摺接突起部151及び係合凸部152を収容孔121の摺接凹部122及び係合凹部123に挿入した状態でホルダ部材15を押圧部材16により押圧して、圧電素子10の駆動子11を被駆動体14に圧接するように構成したものである。
【選択図】 図1
Description
Claims (4)
- 縦振動と屈曲振動を同時に励起して楕円振動を発生させ、前記楕円振動により駆動力を得て被駆動体を駆動する超音波モータであって、
圧電素子と、
前記圧電素子の一方の面に設けられ、該圧電素子の楕円振動により被駆導体を移動させる駆動子と、
前記圧電素子を筐体に位置決め保持するもので、該圧電素子の他方の面の前記縦振動の節又はその近傍で、かつ前記屈曲振動の節又はその近傍に対応して配置され、先端部に係合凸部を有し、前記被駆動体の移動方向と直交する二面からそれぞれ突出された対を構成する湾曲状の摺接突起部が設けられたホルダ部材と、
前記圧電素子が収容され、前記被駆動体の移動方向と直交する方向の内壁面にそれぞれ前記ホルダ部材の摺接突起部が摺接自在に収容される摺接凹部及び前記摺接突起部の係合凸部が収容される係合凹部を有した収容孔が設けられた位置規制部材と、
前記ホルダ部材を押圧して前記圧電素子の駆動子を前記被駆導体に圧接する押圧部材と、
を具備することを特徴とする超音波モータ。 - 前記ホルダ部材の係合凸部は、円柱形状の外観を有し、前記位置規制部材の収容孔の係合凹部は、角柱形状であることを特徴とする請求項1記載の超音波モータ。
- 前記位置規制部材の収容孔の摺接凹部は、面取り形成されていることを特徴とする請求項1又は2記載の超音波モータ。
- 前記ホルダ部材は、樹脂系材料又はゴム系材料で形成され、前記押圧部材は、前記ホルダ部材と異なる材質で、樹脂材料、ゴム系材料又は金属材料のいずれかを用いて形成されていることを特徴とする請求項1乃至3のいずれか記載の超音波モータ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007313880A JP2009142014A (ja) | 2007-12-04 | 2007-12-04 | 超音波モータ |
| US12/272,159 US7732983B2 (en) | 2007-12-04 | 2008-11-17 | Ultrasonic motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007313880A JP2009142014A (ja) | 2007-12-04 | 2007-12-04 | 超音波モータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009142014A true JP2009142014A (ja) | 2009-06-25 |
Family
ID=40674988
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007313880A Pending JP2009142014A (ja) | 2007-12-04 | 2007-12-04 | 超音波モータ |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7732983B2 (ja) |
| JP (1) | JP2009142014A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012044832A (ja) * | 2010-08-23 | 2012-03-01 | Canon Inc | 振動波駆動装置及び画像振れ補正装置 |
| JP2018088821A (ja) * | 2018-03-01 | 2018-06-07 | キヤノン株式会社 | 振動型アクチュエータ、装置および光学機器 |
| US10541629B2 (en) | 2015-08-04 | 2020-01-21 | Canon Kabushiki Kaisha | Vibration driven actuator, apparatus, and optical apparatus |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5791237B2 (ja) * | 2010-06-14 | 2015-10-07 | キヤノン株式会社 | 振動型駆動装置 |
| KR20120007308A (ko) * | 2010-07-14 | 2012-01-20 | 삼성전자주식회사 | 액추에이터 조립체 및 이를 구비한 광학 시스템 |
| JP2012039820A (ja) * | 2010-08-10 | 2012-02-23 | Olympus Corp | 超音波モータ |
| JP2012039819A (ja) * | 2010-08-10 | 2012-02-23 | Olympus Corp | 超音波モータ |
| JP2012165496A (ja) * | 2011-02-03 | 2012-08-30 | Tamron Co Ltd | 振動モータ及びレンズ駆動機構 |
| JP5773900B2 (ja) * | 2012-01-30 | 2015-09-02 | キヤノン株式会社 | モータ |
| JP6579836B2 (ja) * | 2014-07-16 | 2019-09-25 | キヤノン株式会社 | 振動型アクチュエータ及び光学装置 |
| JP6771939B2 (ja) * | 2016-04-25 | 2020-10-21 | キヤノン株式会社 | 振動型アクチュエータ及び電子機器 |
| JP6818428B2 (ja) * | 2016-04-28 | 2021-01-20 | キヤノン株式会社 | 振動波モータ及びこれを用いた装置 |
| CN107124534B (zh) * | 2017-03-29 | 2020-11-27 | 歌尔股份有限公司 | 一种三轴云台、拍摄设备、拍摄系统及无人拍摄系统 |
| CN111085950B (zh) * | 2019-12-11 | 2021-07-20 | 江苏大学 | 一种浮动自平衡超声电机的预压力施加装置 |
| CN114123844B (zh) * | 2021-11-26 | 2023-05-19 | 浙江师范大学 | 一种摩擦俘能的自供电监测系统 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0947044A (ja) * | 1995-07-31 | 1997-02-14 | Canon Inc | 振動波駆動装置 |
| JPH09224384A (ja) * | 1996-02-15 | 1997-08-26 | Canon Inc | 振動装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3807513B2 (ja) * | 1996-02-05 | 2006-08-09 | オリンパス株式会社 | 超音波リニアモータ |
| US6979395B2 (en) | 2000-02-14 | 2005-12-27 | Exxonmobil Research And Engineering Company | Fuel composition |
| US7242131B2 (en) * | 2004-05-12 | 2007-07-10 | Olympus Corporation | Ultrasonic motor |
| JP2009159795A (ja) * | 2007-12-27 | 2009-07-16 | Olympus Corp | 超音波モータ |
-
2007
- 2007-12-04 JP JP2007313880A patent/JP2009142014A/ja active Pending
-
2008
- 2008-11-17 US US12/272,159 patent/US7732983B2/en not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0947044A (ja) * | 1995-07-31 | 1997-02-14 | Canon Inc | 振動波駆動装置 |
| JPH09224384A (ja) * | 1996-02-15 | 1997-08-26 | Canon Inc | 振動装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012044832A (ja) * | 2010-08-23 | 2012-03-01 | Canon Inc | 振動波駆動装置及び画像振れ補正装置 |
| US10541629B2 (en) | 2015-08-04 | 2020-01-21 | Canon Kabushiki Kaisha | Vibration driven actuator, apparatus, and optical apparatus |
| JP2018088821A (ja) * | 2018-03-01 | 2018-06-07 | キヤノン株式会社 | 振動型アクチュエータ、装置および光学機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20090140608A1 (en) | 2009-06-04 |
| US7732983B2 (en) | 2010-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009142014A (ja) | 超音波モータ | |
| JP4802313B2 (ja) | 圧電振動子の保持装置 | |
| US8760036B2 (en) | Vibration wave driving apparatus | |
| KR20070075307A (ko) | 탄성 진동체의 여진 방법 및 진동형 구동 장치 | |
| JP2010141973A (ja) | 超音波モータ | |
| WO2014196212A1 (ja) | リニア超音波モータ及びそれを有する光学装置 | |
| US9641104B2 (en) | Actuator | |
| US10120158B2 (en) | Vibration-type actuator and optical device using the same | |
| US8299682B2 (en) | Ultrasonic motor | |
| US9653675B2 (en) | Driving apparatus, lens apparatus including the same, and imaging apparatus | |
| JP6122452B2 (ja) | アクチュエータ | |
| WO2016002917A1 (ja) | 振動型アクチュエータ、レンズ鏡筒、撮像装置及び自動ステージ | |
| US20110096423A1 (en) | Piezoelectric actuator, lens barrel and optical device | |
| JP2007209088A (ja) | 超音波モータ | |
| JP6708472B2 (ja) | 振動波モータ及び振動波モータが搭載された光学機器 | |
| JP2008172930A (ja) | 振動型駆動装置 | |
| JPWO2010032826A1 (ja) | 振動型アクチュエータの支持装置 | |
| JP2006174549A (ja) | 振動波駆動装置 | |
| JP6393383B2 (ja) | 振動波モータ | |
| JP2009213260A (ja) | 超音波モータ | |
| JP4316350B2 (ja) | 超音波モータ及び超音波モータ付電子機器 | |
| JP2009268209A (ja) | 超音波モータ | |
| JP2011045208A (ja) | 超音波モータ | |
| CN101873079B (zh) | 振动型致动器及其制造方法 | |
| JP7088534B2 (ja) | 駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101027 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120529 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120627 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120703 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121106 |