JP2008170309A - 携帯ナビゲーションシステム、携帯ナビゲーション方法、携帯ナビゲーション用プログラム及び携帯端末 - Google Patents
携帯ナビゲーションシステム、携帯ナビゲーション方法、携帯ナビゲーション用プログラム及び携帯端末 Download PDFInfo
- Publication number
- JP2008170309A JP2008170309A JP2007004332A JP2007004332A JP2008170309A JP 2008170309 A JP2008170309 A JP 2008170309A JP 2007004332 A JP2007004332 A JP 2007004332A JP 2007004332 A JP2007004332 A JP 2007004332A JP 2008170309 A JP2008170309 A JP 2008170309A
- Authority
- JP
- Japan
- Prior art keywords
- position information
- current position
- short
- wireless communication
- range wireless
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


Abstract
情報の信頼性が低下する場合に、外部の現在位置情報を収集して、収集した現在位置情報
と自己の測位した現在位置情報とに基づいて正確な現在位置情報を求める。
【解決手段】 現在位置情報を近距離無線通信手段31,41,51,61を介して送信
する複数の位置情報送信部3A〜3Dと、該複数の位置情報送信部における夫々の近距離
無線通信手段と通信可能な近距離無線通信手段25を有し、ナビゲーション機能を有する
携帯端末2とを備え、前記携帯端末2は、自己の近距離無線通信手段25を介して前記位
置情報送信部3A〜3Dから現在位置情報を受信したときに、受信した現在位置情報に基
づいて現在位置を決定するように構成されている
【選択図】図1
Description
ビゲーションシステム、携帯ナビゲーション方法、携帯ナビゲーション用プログラム及び
携帯端末に関する。
通報システムに用いる位置間引き装置であって、例えば位置算出端末において、GPSな
どの絶対位置検出センサ、車速パルスなどの距離センサ、振動ジャイロなどの角速度セン
サなどを用いて,位置算出手段によって移動体の位置を算出し、同時に位置精度算出手段
によって位置精度を算出し、位置記録判定手段で、位置誤差がしきい値未満であると判定
した場合、位置記録手段はその位置をメモリに記憶するようにした位置データ間引き装置
が提案されている(例えば、特許文献1参照)。
ステムや緊急通報システムに用いるナビゲーションシステムであるので、GPSなどの絶
対位置検出センサ、車速パルスなどの距離センサ、振動ジャイロなどの角速度センサなど
を用いて自車の位置を算出することができるものであるが、携帯ナビゲーションシステム
では、GPSなどの絶対位置検出センサ以外に車速センサからの車速パルスや角速度セン
サなどを使用して移動量を算出することができるが、携帯電話、PDA等の携帯端末では
、GPSなどの絶対位置検出センサ以外に移動量を検出する手段を備えていないので、誤
差が拡大し易いという未解決の課題がある。
末でナビゲーション機能を備えている場合に、自己の測位した現在位置情報の信頼性が低
下する場合に、外部の現在位置情報を収集して、収集した現在位置情報と自己の測位した
現在位置情報とに基づいて正確な現在位置情報を求めるようにした携帯ナビゲーションシ
ステム、携帯ナビゲーション方法、携帯ナビゲーション用プログラム及び携帯端末を提供
することを目的としている。
において、現在位置情報を近距離無線通信手段を介して送信する複数の位置情報送信部と
、該複数の位置情報送信部における夫々の近距離無線通信手段と通信可能な近距離無線通
信手段と、現在位置を自律測位する現在位置測位手段とを有し、ナビゲーション機能を有
する携帯端末とを備え、前記携帯端末は、自己の近距離無線通信手段を介して前記位置情
報送信部から現在位置情報を受信したときに、受信した現在位置情報と自己の現在位置測
位手段の測位結果とに基づいて現在位置を決定するように構成されていることを特徴とし
ている。
位置情報送信部から近距離無線通信を利用して現在位置情報を取得することができ、取得
した現在位置情報に基づいて現在位置を決定するので、正確な現在位置情報を得ることが
できる。
また、本発明の第2の技術手段は、現在位置情報を近距離無線通信手段を介して送信す
る複数の位置情報送信部と、該複数の位置情報送信部における夫々の近距離無線通信手段
と通信可能な近距離無線通信手段と、現在位置を自律測位する現在位置測位手段とを有し
、ナビゲーション機能を有する携帯端末とを備え、前記携帯端末は、自己の近距離無線通
信手段を介して前記位置情報送信部から現在位置情報を受信したときに、受信した現在位
置情報と自己の現在位置測位手段の測位結果とに基づいて現在位置を決定するように構成
されていることを特徴としている。
有するので、外部から現在位置を取得できない場合でも、自己の現在位置測位手段の測定
結果を使用してナビゲーション機能を発揮することができる。
さらに、本発明の第3の技術手段は、第1又は2の技術手段において、前記位置情報送
信部は、前記携帯端末の前記近距離無線通信手段と通信可能な近距離無線通信手段と、現
在位置情報を自律測位する位置測位部と、前記携帯端末から現在位置情報の送信要求があ
ったときに、前記位置測位部で測位した位置情報を自己の前記近距離無線通信手段を介し
て前記携帯端末に送る送信情報生成手段とを備えた移動体位置測定部で構成されているこ
とを特徴としている。
部を位置情報送信部としたもので、飛行機、船舶等では現在位置を自律測位する位置測位
部をGPS受信機、慣性センサ等で構成することから、移動体で移動している場合でも高
精度の現在位置情報を送信することができる。
さらにまた、本発明の第4の技術手段は、第1又は第2の技術手段において、前記位置
情報送信部は、前記携帯端末の前記近距離無線通信手段と通信可能な近距離無線通信手段
と、自己の固定位置情報を記憶する位置情報記憶部とを有し、前記携帯端末から現在位置
情報の送信要求があったときに、前記位置情報記憶部に記憶した自己の位置情報を自己の
前記近距離無線通信手段を介して前記携帯端末に送る固定位置送信部で構成されているこ
とを特徴としている。
たもので、固定位置に設置されていることから最も正確な現在位置情報を位置情報記憶部
に記憶させることができ、携帯端末で固定位置送信部と近距離無線通信することにより信
頼性の高い現在位置情報を取得することができる。
なおさらに、本発明の第5の技術手段は、第1又は第2の技術手段において、前記位置
情報送信部は、前記携帯端末の前記近距離無線通信手段と通信可能な近距離無線通信手段
と、現在位置情報を自律測位する位置測位部と、前記携帯端末から現在位置情報の送信要
求があったときに、前記位置測位部で測位した位置情報を自己の前記近距離無線通信手段
を介して前記携帯端末に送る送信情報生成手段とを備えた移動体位置送信部と、前記携帯
端末の前記近距離無線通信手段と通信可能な近距離無線通信手段と、自己の固定位置情報
を記憶する位置情報記憶部とを有し、前記携帯端末から現在位置情報の送信要求があった
ときに、前記位置情報記憶部に記憶した自己の位置情報を自己の前記近距離無線通信手段
を介して前記携帯端末に送る固定位置送信部とを備えていることを特徴としている。
部としたので、携帯端末で種々の現在位置情報を取得することができ、
また、本発明の第6の技術手段は、第1乃至第5の技術手段において、本発明の第6の
技術手段は、第1乃至第5の技術手段の何れか1つにおいて、前記携帯端末は、複数の位
置情報送信部から現在位置情報を受信したときに、最も受信信号強度が高い現在位置情報
を選択するように構成されていることを特徴としている。
帯端末に一番近い位置情報送信部から送信された現在位置情報を選択することができ、正
確な現在位置情報を取得することができる。
さらに、本発明の第7の技術手段は、前記位置情報送信部は、前記携帯端末に現在位置
情報を送信する際に、当該現在位置情報の精度を表す精度情報を付加して送信し、前記携
帯端末では、複数の位置情報送信部から現在位置情報を受信したときに、最も良い精度の
精度情報が付加された現在位置情報を選択するように構成されていることを特徴としてい
る。
度情報が付加されていることから、複数の位置情報送信部から現在位置情報を受信したと
きに、各現在位置情報に付加された精度情報のうち最も良い精度情報を抽出し、抽出した
精度情報が付加された現在位置情報を選択することにより、最も信頼性の高い現在位置情
報を選択することができる。
体位置送信部は、GPS受信機の受信信号と、慣性センサの検出信号とに基づいて現在位
置情報を測位する位置測位部を備えていることを特徴としている。
この第7の技術手段では、移動体位置送信部は、飛行機や船舶のようにGPS受信機と
慣性センサとに基づいて現在位置を測位するので、正確な現在位置情報を測位することが
できる。
体位置送信部は、GPS受信機の受信信号と、車速センサの検出信号とに基づいて現在位
置情報を測位する位置測位部を備えていることを特徴としている。
この第8の技術手段では、自動車やバスのような公共移動体に移動体位置送信部を備え
ることにより、移動体で移動している際にも、正確な現在位置情報を取得することができ
る。
する複数の位置情報送信部と、該複数の位置情報送信部における夫々の近距離無線通信手
段と通信可能な近距離無線通信手段及び現在位置を自律測位する現在位置測位手段を有し
ナビゲーション機能を有する携帯端末とを備え、前記携帯端末は、前記近距離無線通信手
段を介して通信可能な位置情報送信部が存在するか否かを判定する通信相手検出ステップ
と、該通信相手検出ステップで通信可能な位置情報送信部が存在するときには当該位置情
報送信部から送信される現在位置情報を受信したときに、受信した現在位置情報と自己の
現在位置測位手段の測位結果とに基づいて現在位置を決定する第1の現在位置決定ステッ
プと、前記通信相手検出ステップで通信可能な位置情報送信部が存在しないときに、自己
の現在位置測位手段の測位結果を現在位置として決定する第2の現在位置決定ステップと
を備えたことを特徴としている。
きる。
さらに、本発明の第11の技術手段は、第10の技術手段において、位置情報送信部は
、前記携帯端末に現在位置情報を送信する際に、当該現在位置情報の精度を表す精度情報
を付加して送信し、前記携帯端末では、前記第1の現在位置決定ステップで、複数の位置
情報送信部から現在位置情報を受信したときに、最も良い精度の精度情報が付加された現
在位置情報を選択し、選択した現在位置情報と自己の自律測位手段の測位結果とに基づい
て自己の現在位置を決定するようにしたことを特徴としている。
る。
さらにまた、本発明の第12の技術手段は、現在位置情報を近距離無線通信手段を介し
て送信する複数の位置情報送信部と、該複数の位置情報送信部における夫々の近距離無線
通信手段と通信可能な近距離無線通信手段及び現在位置を自律測位する現在位置測位手段
を有しナビゲーション機能を有する携帯端末とを備え、前記携帯端末において、近距離無
線通信手段を介して通信可能な位置情報送信部が存在するか否かを判定する通信相手検出
ステップと、該通信相手検出ステップで通信可能な位置情報送信部が存在するときには当
該位置情報送信部から送信される現在位置情報を受信したときに、受信した現在位置情報
と自己の現在位置測位手段の測位結果とに基づいて現在位置を決定する第1の現在位置決
定ステップと、前記通信相手検出ステップで通信可能な位置情報送信部が存在しないとき
に、自己の現在位置測位手段の測位結果を現在位置として決定する第2の現在位置決定ス
テップとをコンピュータで実行させることを特徴としている。
ることができる。
なおさらに、本発明の第13の技術手段は、第12の技術手段において、位置情報送信
部は、前記携帯端末に現在位置情報を送信する際に、当該現在位置情報の精度を表す精度
情報を付加して送信し、前記携帯端末では、前記第1の現在位置決定ステップで、複数の
位置情報送信部から現在位置情報を受信したときに、最も良い精度の精度情報が付加され
た現在位置情報を選択し、選択した現在位置情報と自己の自律測位手段の測位結果とに基
づいて自己の現在位置を決定するようにしたことを特徴としている。
ることができる。
また、本発明の第14の技術手段は、現在位置情報を近距離無線通信手段を介して送信
する複数の位置情報送信部における夫々の近距離無線通信手段と通信可能な近距離無線通
信手段を有し、ナビゲーション機能を有する携帯端末であって、自己の近距離無線通信手
段を介して前記位置情報送信部から現在位置情報を受信したときに、受信した現在位置情
報に基づいて現在位置を決定する現在位置決定手段を備えていることを特徴としている。
きる。
さらに、本発明の第15の技術手段は、現在位置情報を近距離無線通信手段を介して送
信する複数の位置情報送信部における夫々の近距離無線通信手段と通信可能な近距離無線
通信手段と、現在位置を自律測位する現在位置測位手段とを有し、ナビゲーション機能を
有する携帯端末であって、自己の近距離無線通信手段を介して前記位置情報送信部から現
在位置情報を受信したときに、受信した現在位置情報と自己の現在位置測位手段の測位結
果とに基づいて現在位置を決定する現在位置決定手段を備えていることを特徴としている
。
きる。
さらにまた、本発明の第16の技術手段は、現在位置情報に精度を表す精度情報を付加
して近距離無線通信手段を介して送信する複数の位置情報送信部における夫々の近距離無
線通信手段と通信可能な近距離無線通信手段と、現在位置を自律測位する現在位置測位手
段とを有し、ナビゲーション機能を有する携帯端末であって、自己の近距離無線通信手段
を介して前記位置情報送信部から現在位置情報を受信したときに、最も良い精度情報が付
加された現在位置情報を選択し、選択した現在位置情報と自己の現在位置測位手段の測位
結果とに基づいて現在位置を決定する現在位置決定手段を備えていることを特徴としてい
る。
果を得ることができる。
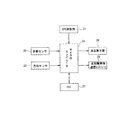
図1は、本発明の一実施形態を示すシステム構成図であって、図中、1は携帯ナビゲー
ションシステムであり、この携帯ナビゲーションシステム1は、ナビゲーション機能を有
する携帯電話機、PDA(Personal Digital Assistants)等で構成される携帯端末2と
、複数の位置情報送信部3A〜3Dとを有する。
クメータ等の歩数を計測可能な歩数センサ22と、地磁気の水平成分に感応するX−Y軸
の2軸構成による地磁気センサで構成される方向センサ23と、これらGPS(Global Po
sitioning System)測定部21、歩数センサ22及び方向センサ23の検出信号が入力さ
れて現在位置を自律測位すると共に、ナビゲーション処理を実行するマイクロコンピュー
タ24と、このマイクロコンピュータ24に接続された近距離無線通信インタフェース2
5と、液晶表示器26とを有する。
トラム拡散技術を使用し、2.4GHzのISM(Industrial Scientific Medical)帯を
搬送波周波数に使用して、半径5m〜15m程度の範囲内における他の近距離無線通信イ
ンタフェースとの間で7ノード程度の小規模ネットワークを形成して、データの送受信を
行うことができるように構成されている。
するもので、前述した携帯端末2の近距離無線通信インタフェース25と同様の構成を有
して、近距離無線通信インタフェース25と無線通信が可能な近距離無線通信インタフェ
ース31と、GPS受信機32及び慣性センサ33と、GPS受信機32で受信したGP
S信号と慣性センサ33で検出した慣性データとが入力され、これらに基づいて正確な測
位演算を行って現在位置情報を算出すると共に、近距離無線通信インタフェース31を介
して携帯端末2の近距離無線通信インタフェース25からの現在位置情報送信要求を受信
したときに、算出した現在位置情報に比較的高精度を表す例えばレベル4の精度情報を付
加して近距離無線通信インタフェース31を介して携帯端末2へ送信する測位演算部とし
てのマイクロコンピュータ34とを備えている。
移動体位置情報送信部を構成するもので、前述した携帯端末2の近距離無線通信インタフ
ェース25と同様の構成を有して、近距離無線通信インタフェース25と無線通信が可能
な近距離無線通信インタフェース41と、GPS受信機42及び車速センサ43と、GP
S受信機42で受信したGPS信号と車速センサ43で検出した車速パルスとが入力され
、これらに基づいて測位演算を行って現在位置情報を算出すると共に、近距離無線通信イ
ンタフェース41を介して携帯端末2の近距離無線通信インタフェース25からの現在位
置情報送信要求を受信したときに、算出した現在位置情報に通常精度のレベル3の精度情
報を付加して携帯端末2から近距離無線通信インタフェース51を介して位置情報送信要
求を受信したときに近距離無線通信インタフェース41を介して携帯端末2へ送信する測
位演算部としてのマイクロコンピュータ44とを備えている。
するもので、前述した携帯端末2の近距離無線通信インタフェース25と同様の構成を有
して、近距離無線通信インタフェース25と無線通信が可能な近距離無線通信インタフェ
ース51と、高精度を表す例えばレベル5の精度情報を付加した設置位置の現在地固定デ
ータでなる現在位置情報を記憶する位置情報記憶部52と、近距離無線通信インタフェー
ス51及び位置情報記憶部52とが接続され、携帯端末2から近距離無線通信インタフェ
ース51を介して位置情報送信要求を受信したときに、位置情報記憶部52に記憶された
精度情報を付加した現在位置情報を近距離無線通信インタフェース51を介して携帯端末
2に送信する位置情報送信処理を行うマイクロコンピュータ53とを備えている。
るもので、前述した携帯端末2の近距離無線通信インタフェース25と同様の構成を有し
て、近距離無線通信インタフェース25と無線通信が可能な近距離無線通信インタフェー
ス61と、屋内に配設された,無線LAN測位システムを構成する複数の無線LAN基地
局62との間で通信を行う無線LANインタフェース63と、この無線LANインタフェ
ース63及び近距離無線通信インタフェース61とが接続されて、無線LANインタフェ
ース63で交信した複数の無線LAN基地局62の間の時計のずれ分と位置情報送信部3
Dからの受信時股間と、各基地局62の位置とから現在位置情報を測位し、測位した現在
位置を取得すると共に、携帯端末2から近距離無線通信インタフェース61を介して位置
情報送信要求を受信したときに、取得した現在位置情報に比較的高精度を表す例えばレベ
ル4の精度情報を付加して近距離無線通信インタフェース61を介して携帯端末2に送信
する位置情報送信処理を行うマイクロコンピュータ64とを備えている。ここで、無線L
AN測位システムは、複数の無線LAN基地局62が相互の無線通信により相互の時計ず
れを検出し、各基地局が位置情報送信部3Dからの信号の受信時間を測定し、各基地局の
相互の時計のずれ分と上記受信時間と、各基地局の位置とから位置情報送信部3Dの現在
位置情報を検出するように構成されている。
等で構成されるメモリ27に記憶されたナビゲーション用プログラムを実行することによ
り、図3に示すナビゲーション処理を行う。
このナビゲーション処理は、先ず、ステップS1で、歩数センサ22及び方向センサ2
3の検出信号を読込み、次いでステップS2に移行して、読込んだ検出信号に基づいて現
在位置情報を測位する。ここで、現在位置情報の測位は、携帯端末2の電源スイッチをオ
ン状態としたとき及び所定時間毎に、GPS測定部21からの現在位置情報を初期位置と
して読込み、読込んだ現在位置情報をそのまま現在位置情報とするが、GPS測定部21
からの現在位置情報を読込むまでの間は、歩数センサ22の検出信号に基づく距離情報と
、方向センサ23の検出信号に基づく移動方向とに基づいて現在位置情報を順次更新する
ことにより、消費電力の大きなGPS測定部21の測位処理を極力少なくして消費電力の
低減を行う。
置情報送信要求を送信し、次いでステップS4に移行して、この現在位置情報送信要求に
応答する位置情報送信部3A〜3Dの何れか1つ又は複数が存在するか否かを判定する。
この判定結果が現在位置情報送信要求に応答する位置情報送信部3A〜3Dが存在しない
ときには、ステップS5に移行して、ステップS2で算出した現在位置情報をそのまま現
在位置情報として決定し、次いでステップS10に移行する。
部3A〜3Dの少なくとも1つが存在するときには、ステップS6に移行して、応答した
位置情報送信部3A〜3Dの少なくとも1つから送信される現在位置情報を受信したか否
かを判定し、現在位置情報を受信していないときには受信するまで待機し、現在位置情報
を受信したときにはステップS7に移行して、受信した現在位置情報が複数であるか否か
を判定し、受信した現在位置情報が1つであるときにはそのままステップS9に移行し、
受信した現在位置情報が複数であるときにはステップS8に移行する。
度情報が付加されている現在位置情報を選択してからステップS9に移行する。
このステップS9では、受信した現在位置情報又は選択した現在位置情報と自己のステ
ップS2で算出した現在位置情報とに基づいて現在位置を決定してからステップS10に
移行する。
情報に付加してナビゲーション表示情報を形成し、形成したナビゲーション表示情報を液
晶表示器26に出力して表示してから前記ステップS1に戻る。
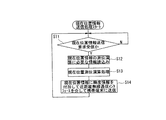
また、各位置情報送信部3A、3B及び3Dのマイクロコンピュータ34、44及び6
4で、これに接続されたRAM、ROM等で構成されるメモリ36、46及び66に記憶
されたナビゲーション用プログラムを実行することにより、図4に示す現在位置情報送信
処理を行う。
信要求を近距離無線通信インタフェースを介して受信したか否かを判定し、現在位置情報
送信要求を受信していないときには、これを受信するまで待機し、現在位置情報送信要求
を受信したときにはステップS12に移行する。
このステップS12では、現在位置情報を測位するために必要とする情報を読込み、次
いでステップS13に移行して、読込んだ情報から測位演算を行って現在位置情報を生成
し、次いでステップS14に移行して、生成した現在位置情報を近距離無線通信インタフ
ェースを介して携帯端末2に送信してから前記ステップS11に戻る。
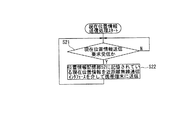
ROM等で構成されるメモリ56に記憶されたナビゲーション用プログラムを実行するこ
とにより、図5に示す現在位置情報送信処理を行う。
この現在位置情報送信処理は、先ずステップS21で、携帯端末2から現在位置情報送
信要求を近距離無線通信インタフェースを介して受信したか否かを判定し、現在位置情報
送信要求を受信していないときには、これを受信するまで待機し、現在位置情報送信要求
を受信したときにはステップS22に移行する。
無線通信インタフェースを介して携帯端末2に送信してから前記ステップS21に戻る。
次に、上記実施形態の動作を説明する。
今、携帯端末2の電源スイッチがオフ状態であるものとすると、この状態では、マイク
ロコンピュータ24が作動を停止していると共に、液晶表示器26も作動停止状態にあり
、ナビゲーション機能は停止状態にある。
ンピュータ24及び液晶表示器26その他の機器が作動状態となり、マイクロコンピュー
タ24で図3に示すナビゲーション処理を実行開始する。
このため、先ず、GPS測定部21から現在位置情報を取得すると共に、歩数センサ2
2及び方向センサ23の検出信号を読込み(ステップS1)、次いで読込んだGPS測定
部21からの現在位置情報を初期位置としてから歩数センサ22及び方向センサ23の検
出信号に基づいて現在位置情報を測位する(ステップS2)。
より、携帯端末2の近傍に配置された位置情報送信部3A〜3Dを含んで形成される小規
模ネットワークに現在位置情報送信要求を送信する(ステップS3)。
次いで、位置情報送信部3A〜3Dから応答があったか否かを判定し(ステップS4)
、応答がない場合すなわち、小規模ネットワークに位置情報送信部3A〜3Dが参加して
いない場合には、外部からの現在位置情報の取得は不可能であると判断してステップS2
で算出した自己の現在位置情報をそのまま現在位置情報として決定し(ステップS5)、
次いで、設定した現在位置情報を地図情報に付加してナビゲーション表示情報を生成し、
これを液晶表示器26に出力する(ステップS8)。これにより、液晶表示器26に地図
情報に現在位置表示を行ったナビゲーション表示が行われる。
センサ23の検出信号に基づいて順次現在位置情報が更新される。
その後、位置情報送信部3A〜3Dの何れかに数十メートル以内に近づいて、携帯端末
2の近距離無線通信インタフェースが形成する小規模ネットワークに位置情報送信部3A
〜3Dの何れかが参加する状態となると、参加した位置情報送信部3A、3B及び3Dの
何れかで、図4の現在位置情報送信処理を実行し、近距離無線通信インタフェースで、携
帯端末2からの位置情報送信要求を受信すると、測位演算処理で算出した現在位置情報に
精度情報を付加して近距離無線通信インタフェースを介して携帯端末2に送信する。また
、位置情報送信部3Cが小規模ネットワークに参加したときには、位置情報記憶部52に
記憶されている精度情報を付加した現在位置情報を、近距離無線通信インタフェースを介
して携帯端末2に送信する。
近距離無線通信インタフェース25を介して受信すると、受信した現在位置情報が1つで
ある場合には受信した現在位置情報と自己の測位した現在位置情報とに基づいて現在位置
情報を決定し(ステップS9)、現在位置情報を地図情報に付加してナビゲーション表示
情報を生成し、これを液晶表示器26に出力して表示する。
在位置情報に付加されている精度情報を参照して、最も精度の高い精度情報が付加された
現在位置情報を選択し、選択した現在位置情報とステップS2で算出した自己の現在位置
情報とに基づいて現在位置情報を決定し、決定した現在位置情報を地図情報に付加してナ
ビゲーション表示情報を生成し、これを液晶表示器26に出力して表示する。
3Aが小規模ネットワークに参加することになるので、GPS受信機32の受信情報と慣
性センサ33で検出した慣性データとに基づく測位演算によって算出された正確な現在位
置情報を携帯端末2で受信することができ、飛行機や船舶の移動に伴って正確なナビゲー
ション表示を行うことができる。
Bが小規模ネットワークに参加することから、位置情報送信部3Bから送信された精度情
報を付加した現在位置情報を携帯端末2で受信することができ、公共交通車両の移動に伴
って正確なナビゲーション表示を行うことができる。
さらに、携帯端末2を所持して歩行している場合には、固定位置情報送信部となる位置
情報送信部3Cの近傍位置に近づくと、この位置情報送信部3Cから送信される正確な現
在位置情報を受信することができ、正確なナビゲーション表示を行うことができる。
の近傍位置に近づくと、位置情報送信部3Dから送信される正確な現在位置情報を受信す
ることができ、正確なナビゲーション表示を行うことができる。
しかも、携帯端末2で、複数の現在位置情報を受信する状態となると、現在位置情報に
付加されている精度情報を参照して最も高精度の精度情報が付加された現在位置情報を選
択するので、より高精度のナビゲーション表示を行うことができる。
説明したが、これに限定されるものではなく、GPS測定部21を省略するようにしても
よく、この場合には、最初に小規模ネットワークに参加した位置情報送信部3A〜3Dか
ら受信した現在位置情報を初期値として設定するようにすればよい。
また、上記実施形態においては、携帯端末2に自律測位部を設けた場合について説明し
たが、これに限定されるものではなく、位置情報送信部3A〜3Dの設置数が多くなった
場合には、自律測位部を省略して、外部の位置情報送信部3A〜3Dから受信する現在位
置情報に基づいてナビゲーション表示を行うようにしてもよい。
説明したが、これに限定されるものではなく、現在位置情報に加えて速度情報も位置情報
送信部3A及び3Bから取得するようにしてもよい。
さらにまた、上記実施形態では、位置情報送信部3A〜3Dと携帯端末2との距離を考
慮しない場合について説明したが、これに限定されるものではなく、各位置情報送信部3
A〜3Dから送信される現在位置情報の送信電力を一定値とし、携帯端末2で受信した現
在位置情報の受信信号強度を測定することにより、この受信信号強度が大きい程位置情報
送信部3A〜3Dとの距離が近いことになるので、受信信号強度が大きい現在位置情報を
選択するようにしてもよく、さらには受信信号強度を位置情報送信部3A〜3Dとの距離
に換算して、この換算した距離に応じて受信した現在位置情報を補正するようにしてもよ
い。
用した場合について説明したが、歩数センサに代えて加速度センサを適用して、X、Y、
Z軸の3軸の振動を検出し、これらから重力加速度の影響を除去した加速度成分を算出し
、歩行に起因する振動成分を算出することにより歩数を検出するようにしてもよい。
また、上記実施形態においては、近距離無線通信インタフェースで小規模ネットワーク
を構成する場合について説明したが、これに限定されるものではなく、UWB、無線LA
N等のインタフェースをも受けるようにしてもよく、要は通信距離が10メートル前後の
比較的短い無線通信方法であれば、任意の無線通信方法を適用することができる。
…GPS測定部、22…歩行センサ、23…方向センサ、24…マイクロコンピュータ、
25…近距離無線通信インタフェース、26…液晶表示器、31…近距離無線通信インタ
フェース、32…GPS受信機、33…慣性センサ、34…マイクロコンピュータ、41
…近距離無線通信インタフェース、42…GPS受信機、43…車速センサ、44…マイ
クロコンピュータ、51…近距離無線通信インタフェース、52…位置情報記憶部、53
…マイクロコンピュータ、61…近距離無線通信インタフェース、62…無線LAN基地
局、63…無線LANインタフェース、64…マイクロコンピュータ
Claims (16)
- 現在位置情報を近距離無線通信手段を介して送信する複数の位置情報送信部と、該複数
の位置情報送信部における夫々の近距離無線通信手段と通信可能な近距離無線通信手段を
有し、ナビゲーション機能を有する携帯端末とを備え、前記携帯端末は、自己の近距離無
線通信手段を介して前記位置情報送信部から現在位置情報を受信したときに、受信した現
在位置情報に基づいて現在位置を決定するように構成されていることを特徴とする携帯ナ
ビゲーションシステム。 - 現在位置情報を近距離無線通信手段を介して送信する複数の位置情報送信部と、該複数
の位置情報送信部における夫々の近距離無線通信手段と通信可能な近距離無線通信手段と
、現在位置を自律測位する現在位置測位手段とを有し、ナビゲーション機能を有する携帯
端末とを備え、前記携帯端末は、自己の近距離無線通信手段を介して前記位置情報送信部
から現在位置情報を受信したときに、受信した現在位置情報と自己の現在位置測位手段の
測位結果とに基づいて現在位置を決定するように構成されていることを特徴とする携帯ナ
ビゲーションシステム。 - 前記位置情報送信部は、前記携帯端末の前記近距離無線通信手段と通信可能な近距離無
線通信手段と、現在位置情報を自律測位する位置測位部と、前記携帯端末から現在位置情
報の送信要求があったときに、前記位置測位部で測位した位置情報を自己の前記近距離無
線通信手段を介して前記携帯端末に送る送信情報生成手段とを備えた移動体位置送信部で
構成されていることを特徴とする請求項1又は2に記載の携帯ナビゲーションシステム。 - 前記位置情報送信部は、前記携帯端末の前記近距離無線通信手段と通信可能な近距離無
線通信手段と、自己の固定位置情報を記憶する位置情報記憶部とを有し、前記携帯端末か
ら現在位置情報の送信要求があったときに、前記位置情報記憶部に記憶した自己の位置情
報を自己の前記近距離無線通信手段を介して前記携帯端末に送る固定位置送信部で構成さ
れていることを特徴とする請求項1又は2に記載の携帯ナビゲーションシステム。 - 前記位置情報送信部は、前記携帯端末の前記近距離無線通信手段と通信可能な近距離無
線通信手段と、現在位置情報を自律測位する位置測位部と、前記携帯端末から現在位置情
報の送信要求があったときに、前記位置測位部で測位した位置情報を自己の前記近距離無
線通信手段を介して前記携帯端末に送る送信情報生成手段とを備えた移動体位置送信部と
、前記携帯端末の前記近距離無線通信手段と通信可能な近距離無線通信手段と、自己の固
定位置情報を記憶する位置情報記憶部とを有し、前記携帯端末から現在位置情報の送信要
求があったときに、前記位置情報記憶部に記憶した自己の位置情報を自己の前記近距離無
線通信手段を介して前記携帯端末に送る固定位置送信部とを備えていることを特徴とする
請求項1又は2に記載の携帯ナビゲーションシステム。 - 前記携帯端末は、複数の位置情報送信部から現在位置情報を受信したときに、最も受信
信号強度が高い現在位置情報を選択するように構成されていることを特徴とする請求項1
乃至5の何れか1項に記載の携帯ナビゲーションシステム。 - 前記位置情報送信部は、前記携帯端末に現在位置情報を送信する際に、当該現在位置情
報の精度を表す精度情報を付加して送信し、前記携帯端末では、複数の位置情報送信部か
ら現在位置情報を受信したときに、最も良い精度の精度情報が付加された現在位置情報を
選択するように構成されていることを特徴とする請求項1乃至5の何れか1項に記載の携
帯ナビゲーションシステム。 - 前記移動体位置送信部は、GPS受信機の受信信号と、慣性センサの検出信号とに基づ
いて現在位置情報を測位する位置測位部を備えていることを特徴とする請求項3又は5に
記載の携帯ナビゲーションシステム。 - 前記移動体位置送信部は、GPS受信機の受信信号と、車速センサの検出信号とに基づ
いて現在位置情報を測位する位置測位部を備えていることを特徴とする請求項3又は5に
記載の携帯ナビゲーションシステム。 - 現在位置情報を近距離無線通信手段を介して送信する複数の位置情報送信部と、該複数
の位置情報送信部における夫々の近距離無線通信手段と通信可能な近距離無線通信手段及
び現在位置を自律測位する現在位置測位手段を有しナビゲーション機能を有する携帯端末
とを備え、前記携帯端末は、前記近距離無線通信手段を介して通信可能な位置情報送信部
が存在するか否かを判定する通信相手検出ステップと、該通信相手検出ステップで通信可
能な位置情報送信部が存在するときには当該位置情報送信部から送信される現在位置情報
を受信したときに、受信した現在位置情報と自己の現在位置測位手段の測位結果とに基づ
いて現在位置を決定する第1の現在位置決定ステップと、前記通信相手検出ステップで通
信可能な位置情報送信部が存在しないときに、自己の現在位置測位手段の測位結果を現在
位置として決定する第2の現在位置決定ステップとを備えたことを特徴とする携帯ナビゲ
ーション方法。 - 位置情報送信部は、前記携帯端末に現在位置情報を送信する際に、当該現在位置情報の
精度を表す精度情報を付加して送信し、前記携帯端末では、前記第1の現在位置決定ステ
ップで、複数の位置情報送信部から現在位置情報を受信したときに、最も良い精度の精度
情報が付加された現在位置情報を選択し、選択した現在位置情報と自己の自律測位手段の
測位結果とに基づいて自己の現在位置を決定するようにしたことを特徴とする請求項10
に記載の携帯ナビゲーション方法。 - 現在位置情報を近距離無線通信手段を介して送信する複数の位置情報送信部と、該複数
の位置情報送信部における夫々の近距離無線通信手段と通信可能な近距離無線通信手段及
び現在位置を自律測位する現在位置測位手段を有しナビゲーション機能を有する携帯端末
とを備え、前記携帯端末において、近距離無線通信手段を介して通信可能な位置情報送信
部が存在するか否かを判定する通信相手検出ステップと、該通信相手検出ステップで通信
可能な位置情報送信部が存在するときには当該位置情報送信部から送信される現在位置情
報を受信したときに、受信した現在位置情報と自己の現在位置測位手段の測位結果とに基
づいて現在位置を決定する第1の現在位置決定ステップと、前記通信相手検出ステップで
通信可能な位置情報送信部が存在しないときに、自己の現在位置測位手段の測位結果を現
在位置として決定する第2の現在位置決定ステップとをコンピュータで実行させることを
特徴とする携帯ナビゲーション用プログラム。 - 位置情報送信部は、前記携帯端末に現在位置情報を送信する際に、当該現在位置情報の
精度を表す精度情報を付加して送信し、前記携帯端末では、前記第1の現在位置決定ステ
ップで、複数の位置情報送信部から現在位置情報を受信したときに、最も良い精度の精度
情報が付加された現在位置情報を選択し、選択した現在位置情報と自己の自律測位手段の
測位結果とに基づいて自己の現在位置を決定するようにしたことを特徴とする請求項12
に記載の携帯ナビゲーション用プログラム。 - 現在位置情報を近距離無線通信手段を介して送信する複数の位置情報送信部における夫
々の近距離無線通信手段と通信可能な近距離無線通信手段を有し、ナビゲーション機能を
有する携帯端末であって、
自己の近距離無線通信手段を介して前記位置情報送信部から現在位置情報を受信したと
きに、受信した現在位置情報に基づいて現在位置を決定する現在位置決定手段を備えてい
ることを特徴とする携帯端末。 - 現在位置情報を近距離無線通信手段を介して送信する複数の位置情報送信部における夫
々の近距離無線通信手段と通信可能な近距離無線通信手段と、現在位置を自律測位する現
在位置測位手段とを有し、ナビゲーション機能を有する携帯端末であって、
自己の近距離無線通信手段を介して前記位置情報送信部から現在位置情報を受信したと
きに、受信した現在位置情報と自己の現在位置測位手段の測位結果とに基づいて現在位置
を決定する現在位置決定手段を備えていることを特徴とする携帯端末。 - 現在位置情報に精度を表す精度情報を付加して近距離無線通信手段を介して送信する複
数の位置情報送信部における夫々の近距離無線通信手段と通信可能な近距離無線通信手段
と、現在位置を自律測位する現在位置測位手段とを有し、ナビゲーション機能を有する携
帯端末であって、
自己の近距離無線通信手段を介して前記位置情報送信部から現在位置情報を受信したと
きに、最も良い精度情報が付加された現在位置情報を選択し、選択した現在位置情報と自
己の現在位置測位手段の測位結果とに基づいて現在位置を決定する現在位置決定手段を備
えていることを特徴とする携帯端末。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007004332A JP2008170309A (ja) | 2007-01-12 | 2007-01-12 | 携帯ナビゲーションシステム、携帯ナビゲーション方法、携帯ナビゲーション用プログラム及び携帯端末 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007004332A JP2008170309A (ja) | 2007-01-12 | 2007-01-12 | 携帯ナビゲーションシステム、携帯ナビゲーション方法、携帯ナビゲーション用プログラム及び携帯端末 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008170309A true JP2008170309A (ja) | 2008-07-24 |
| JP2008170309A5 JP2008170309A5 (ja) | 2010-02-12 |
Family
ID=39698543
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007004332A Withdrawn JP2008170309A (ja) | 2007-01-12 | 2007-01-12 | 携帯ナビゲーションシステム、携帯ナビゲーション方法、携帯ナビゲーション用プログラム及び携帯端末 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2008170309A (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010085256A (ja) * | 2008-09-30 | 2010-04-15 | Oki Electric Ind Co Ltd | 端末測位方法、端末測位システム及び基地局 |
| JP2010183262A (ja) * | 2009-02-04 | 2010-08-19 | Kddi Corp | 推定位置に対する評価値を用いた位置推定方法、移動端末及びプログラム |
| KR101241638B1 (ko) | 2013-01-14 | 2013-03-11 | (주)안세기술 | 모바일 어플리케이션 플랫폼 기반의 운항선박 및 항로표지 위치정보 확인시스템 |
| JP2014174589A (ja) * | 2013-03-06 | 2014-09-22 | Mega Chips Corp | 拡張現実システム、プログラムおよび拡張現実提供方法 |
| CN104270547A (zh) * | 2009-11-30 | 2015-01-07 | 松下电器(美国)知识产权公司 | 通信方法、通信装置及位置检测方法 |
| US9020432B2 (en) | 2009-11-30 | 2015-04-28 | Panasonic Intellectual Property Corporation Of America | Mobile communication device, communication method, integrated circuit, and program |
| US9047759B2 (en) | 2010-11-25 | 2015-06-02 | Panasonic Intellectual Property Corporation Of America | Communication device |
| US9143933B2 (en) | 2008-12-26 | 2015-09-22 | Panasonic Intellectual Property Corporation Of America | Communication device that receives external device information from an external device using near field communication |
| US9218103B2 (en) | 2012-09-19 | 2015-12-22 | Shenzhen Coocaa Network Technology Co. Ltd. | 3D interface implementation method and system based on the android system |
| USRE45980E1 (en) | 2009-11-30 | 2016-04-19 | Panasonic Intellectual Property Corporation Of America | Communication device |
| WO2017026120A1 (ja) * | 2015-08-10 | 2017-02-16 | セイコーエプソン株式会社 | 位置情報利用システム、ゲートウェイ装置、及びウェアラブル装置 |
| JP2017194969A (ja) * | 2017-04-27 | 2017-10-26 | 株式会社メガチップス | 拡張現実システム、プログラムおよび拡張現実提供方法 |
| US10091614B2 (en) | 2016-12-16 | 2018-10-02 | Fuji Xerox Co., Ltd. | Information processing apparatus, image processing apparatus, and non-transitory computer readable storage medium |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0962998A (ja) * | 1995-08-21 | 1997-03-07 | Aqueous Res:Kk | 携帯用ナビゲーション装置 |
| JPH09312883A (ja) * | 1996-05-20 | 1997-12-02 | Sony Corp | 携帯電話機 |
| JPH10318777A (ja) * | 1997-05-20 | 1998-12-04 | Unisia Jecs Corp | ナビゲーション装置 |
| JP2001235528A (ja) * | 2000-02-22 | 2001-08-31 | Ntt Docomo Inc | 携帯端末 |
| JP2006013577A (ja) * | 2004-06-22 | 2006-01-12 | Hitachi Ltd | 無線ネットワークにおける位置測定装置及び位置測定プログラム |
-
2007
- 2007-01-12 JP JP2007004332A patent/JP2008170309A/ja not_active Withdrawn
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0962998A (ja) * | 1995-08-21 | 1997-03-07 | Aqueous Res:Kk | 携帯用ナビゲーション装置 |
| JPH09312883A (ja) * | 1996-05-20 | 1997-12-02 | Sony Corp | 携帯電話機 |
| JPH10318777A (ja) * | 1997-05-20 | 1998-12-04 | Unisia Jecs Corp | ナビゲーション装置 |
| JP2001235528A (ja) * | 2000-02-22 | 2001-08-31 | Ntt Docomo Inc | 携帯端末 |
| JP2006013577A (ja) * | 2004-06-22 | 2006-01-12 | Hitachi Ltd | 無線ネットワークにおける位置測定装置及び位置測定プログラム |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010085256A (ja) * | 2008-09-30 | 2010-04-15 | Oki Electric Ind Co Ltd | 端末測位方法、端末測位システム及び基地局 |
| US9143933B2 (en) | 2008-12-26 | 2015-09-22 | Panasonic Intellectual Property Corporation Of America | Communication device that receives external device information from an external device using near field communication |
| JP2010183262A (ja) * | 2009-02-04 | 2010-08-19 | Kddi Corp | 推定位置に対する評価値を用いた位置推定方法、移動端末及びプログラム |
| CN104270547A (zh) * | 2009-11-30 | 2015-01-07 | 松下电器(美国)知识产权公司 | 通信方法、通信装置及位置检测方法 |
| USRE45980E1 (en) | 2009-11-30 | 2016-04-19 | Panasonic Intellectual Property Corporation Of America | Communication device |
| JP5683485B2 (ja) * | 2009-11-30 | 2015-03-11 | パナソニック インテレクチュアル プロパティ コーポレーション オブアメリカPanasonic Intellectual Property Corporation of America | 通信装置 |
| US9020432B2 (en) | 2009-11-30 | 2015-04-28 | Panasonic Intellectual Property Corporation Of America | Mobile communication device, communication method, integrated circuit, and program |
| USRE46108E1 (en) | 2009-11-30 | 2016-08-16 | Panasonic Intellectual Property Corporation Of America | Communication device |
| US9047759B2 (en) | 2010-11-25 | 2015-06-02 | Panasonic Intellectual Property Corporation Of America | Communication device |
| US9142122B2 (en) | 2010-11-25 | 2015-09-22 | Panasonic Intellectual Property Corporation Of America | Communication device for performing wireless communication with an external server based on information received via near field communication |
| US9262913B2 (en) | 2010-11-25 | 2016-02-16 | Panasonic Intellectual Property Corporation Of America | Communication device |
| US9218103B2 (en) | 2012-09-19 | 2015-12-22 | Shenzhen Coocaa Network Technology Co. Ltd. | 3D interface implementation method and system based on the android system |
| KR101241638B1 (ko) | 2013-01-14 | 2013-03-11 | (주)안세기술 | 모바일 어플리케이션 플랫폼 기반의 운항선박 및 항로표지 위치정보 확인시스템 |
| JP2014174589A (ja) * | 2013-03-06 | 2014-09-22 | Mega Chips Corp | 拡張現実システム、プログラムおよび拡張現実提供方法 |
| WO2017026120A1 (ja) * | 2015-08-10 | 2017-02-16 | セイコーエプソン株式会社 | 位置情報利用システム、ゲートウェイ装置、及びウェアラブル装置 |
| US10091614B2 (en) | 2016-12-16 | 2018-10-02 | Fuji Xerox Co., Ltd. | Information processing apparatus, image processing apparatus, and non-transitory computer readable storage medium |
| JP2017194969A (ja) * | 2017-04-27 | 2017-10-26 | 株式会社メガチップス | 拡張現実システム、プログラムおよび拡張現実提供方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008170309A (ja) | 携帯ナビゲーションシステム、携帯ナビゲーション方法、携帯ナビゲーション用プログラム及び携帯端末 | |
| EP2616774B1 (en) | Indoor positioning using pressure sensors | |
| US8630798B2 (en) | Electronic system and method for personal navigation | |
| KR101370138B1 (ko) | 기초 무브먼트 패턴 평가에 의한 무브먼트 검출을 위한 방법 및 장치 | |
| JP4200327B2 (ja) | 測位装置およびそれを用いる位置情報システム | |
| US10337884B2 (en) | Method and apparatus for fast magnetometer calibration | |
| TWI626857B (zh) | 無線定位系統 | |
| CN107079249B (zh) | 用于在车辆内共享位置数据的系统和方法 | |
| JP2007316028A (ja) | 位置情報提供システムおよび移動通信装置 | |
| US20090267832A1 (en) | Systems and methods for dynamically determining position | |
| US11573335B2 (en) | Method and apparatus for position estimation | |
| CN104950284A (zh) | 装置相对位置的判定方法及电子装置 | |
| JP2008170309A5 (ja) | ||
| CN101529271A (zh) | 位置估计方法及相关装置 | |
| WO2015079630A1 (ja) | 運転支援ユニット及び運転支援システム | |
| KR101762776B1 (ko) | 도보 내비게이션 방법 및 이를 위한 장치 | |
| JP2014142272A (ja) | 位置検出装置およびプログラム | |
| JP6428214B2 (ja) | 相対位置測定装置、プログラム | |
| KR20160090199A (ko) | 무선 신호를 이용한 실내 위치 측정 장치 및 방법 | |
| JP2014142185A (ja) | 車載装置、端末装置、ナビゲーションシステム | |
| JP5157795B2 (ja) | 端末測位方法、端末測位システム及び基地局 | |
| JP2014107587A (ja) | 電子装置、および電子装置の制御プログラム | |
| JP2002243465A (ja) | ナビゲーションシステム | |
| JP6128789B2 (ja) | 情報処理システム、情報処理方法、および、情報処理プログラム | |
| KR20100057749A (ko) | 정밀한 위치확인 방법 및 지능적인 근거리 위치 단말 식별 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091216 |
|
| A621 | Written request for application examination |
Effective date: 20091216 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A977 | Report on retrieval |
Effective date: 20110413 Free format text: JAPANESE INTERMEDIATE CODE: A971007 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20110419 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A761 | Written withdrawal of application |
Effective date: 20110526 Free format text: JAPANESE INTERMEDIATE CODE: A761 |