JP2008024125A - 車両挙動安定化制御装置 - Google Patents
車両挙動安定化制御装置 Download PDFInfo
- Publication number
- JP2008024125A JP2008024125A JP2006197962A JP2006197962A JP2008024125A JP 2008024125 A JP2008024125 A JP 2008024125A JP 2006197962 A JP2006197962 A JP 2006197962A JP 2006197962 A JP2006197962 A JP 2006197962A JP 2008024125 A JP2008024125 A JP 2008024125A
- Authority
- JP
- Japan
- Prior art keywords
- control
- rollover
- tendency
- control amount
- tire angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Abstract
【課題】車両の横滑りを抑制しつつ、横転も防止できる車両挙動安定化制御装置を提供する。
【解決手段】横転傾向の発生が検出された場合に、横滑り防止制御の為に演算されていたブレーキ力の制御量Adやタイヤ角の制御量Bdを補正し、横転防止制御の為のブレーキ力の制御量Aおよびタイヤ角の制御量Bを求める。これにより、横滑り防止制御中に横転傾向が発生した場合に、横滑り防止制御よりも優先して横転防止制御を行うことができ、横転傾向を抑制することが可能となる。
【選択図】図2
【解決手段】横転傾向の発生が検出された場合に、横滑り防止制御の為に演算されていたブレーキ力の制御量Adやタイヤ角の制御量Bdを補正し、横転防止制御の為のブレーキ力の制御量Aおよびタイヤ角の制御量Bを求める。これにより、横滑り防止制御中に横転傾向が発生した場合に、横滑り防止制御よりも優先して横転防止制御を行うことができ、横転傾向を抑制することが可能となる。
【選択図】図2
Description
本発明は、車両の横滑り防止制御(Electronic Stability Control)を行いつつ、さらに、車両の横転防止制御も行えるようにした車両挙動安定化制御装置に関するものである。
従来より、車両の横滑り状態を検出したときに、その横滑りの抑制を図る横滑り防止装置がある(例えば、特許文献1参照)。この横滑り防止装置では、横滑り状態に応じて、前後輪タイヤ角や操舵トルクを制御すると共に、所望の車輪にブレーキ力を発生させることにより、横滑りを抑制できる方向にモーメントおよび減速度を発生させることで、横滑りの抑制を図っている。
特開昭60−161256号公報
しかしながら、上記横滑り防止装置による制御は横滑りの抑制を主眼とするものである。
本発明は上記点に鑑みて、車両の横滑りを抑制しつつ、横転も防止できる車両挙動安定化制御装置を提供することを課題とする。
上記目的を達成するため、請求項1に記載の発明では、車両状態判定手段(110)にて、車両の横滑り傾向を表すパラメータおよび横転傾向を表すパラメータに基づいて車両の横滑り傾向および横転傾向を判定する。そして、横滑り傾向が発生したときに、横滑り防止制御手段(120、140、150)により、横滑り傾向を表すパラメータに基づいて所定の制御対象輪に対するブレーキ力の制御量(Ad)および操舵輪のタイヤ角の制御量(Bd)を演算し、この演算結果に基づいて制御対象輪のブレーキ力および操舵輪のタイヤ角を制御する。また、横転傾向が発生したときに、横転防止制御手段(120、130、170)により、横滑り防止制御手段にて演算されたタイヤ角の制御量(Bd)を該タイヤ角が小さくなるように補正し、この補正結果に基づいて操舵輪のタイヤ角を制御することを特徴としている。
このように、横転傾向の発生が検出された場合に、横滑り防止制御の為に演算されていたタイヤ角の制御量を補正し、横転防止制御の為のタイヤ角の制御量を求めるようにしている。このため、横滑り防止制御中に横転傾向が発生した場合に、横滑り防止制御よりも優先して横転防止制御を行うことができ、横転傾向を抑制することが可能となる。
この場合、請求項2に示すように、横転防止制御手段にて、横転防止制御手段は、横転傾向の度合いが高くなるほどタイヤ角が小さくなるようにタイヤ角の制御量を補正すると、横転傾向の度合いに応じた横転防止制御を行うことが可能となる。
また、請求項3に記載の発明では、横転防止制御手段は、横滑り防止手段にて演算されたブレーキ力の制御量(Ad)を該ブレーキ力が大きくなるように補正することを特徴としている。
このように、横転傾向の発生が検出された場合に、横滑り防止制御の為に演算されていたブレーキ力の制御量をブレーキ力が大きくなるように補正し、横転防止制御の為のブレーキ力の制御量を求めるようにすれば、より好適な横転防止制御を行うことが可能となる。
この場合、請求項4に示すように、横転防止制御手段にて、横転傾向が発生したときに、その横転傾向の度合いが高くなるほどブレーキ力が大きくなるように、出力対象とするブレーキ力の制御量を変化させると、より横転傾向の度合いに応じた横転防止制御を行うことが可能となる。
また、このように、ブレーキ力の制御量の補正を行う場合には、請求項5に示すように、横転防止制御手段にて、タイヤ角の制御量の補正と、ブレーキ力の制御量の補正を同時に行ことができる。
また、請求項6に示すように、横転防止制御手段にて、タイヤ角の制御量の補正を行った後に、ブレーキ力の制御量の補正を行うこともできる。
このようにすれば、まずタイヤ角の補正によって車両の進行方向の補正を優先的に行い、その後、ブレーキ力の制御量の補正を行うようにできるため、より車両が安定化を優先した制御を行うことができる。
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
(第1実施形態)
図1は、本発明の第1実施形態における車両安定化制御を行う車両安定化制御装置を実現するシステム全体の概略構成を示した図である。ここでは、エンジンが前方に搭載され、後輪側を駆動輪とするFR車両に対して本発明の一実施形態となる車両安定化制御装置を適用した場合について説明するが、前輪側を駆動輪とするFF車両等、他の形態の車両についても同様に適用可能である。
図1は、本発明の第1実施形態における車両安定化制御を行う車両安定化制御装置を実現するシステム全体の概略構成を示した図である。ここでは、エンジンが前方に搭載され、後輪側を駆動輪とするFR車両に対して本発明の一実施形態となる車両安定化制御装置を適用した場合について説明するが、前輪側を駆動輪とするFF車両等、他の形態の車両についても同様に適用可能である。
図1に示されるように、FR車両においては、エンジン1で発生させられたエンジン出力(エンジントルク)がトランスミッション2に伝えられ、トランスミッション2で設定されたギア位置に応じたギア比で変換されたのち、プロペラシャフト3に駆動力が伝達される。そして、プロペラシャフト3に対し、デファレンシャル4を介して接続されたドライブシャフト5を通じて、駆動輪となる後輪RR、RLに駆動力が付与されるようになっている。
横滑り防止制御ECU6は、本発明でいう車両安定化制御装置に相当するものであり、この横滑り防止制御ECU6により車両安定化制御として横滑り防止制御および横転防止制御が実行される。
具体的には、横滑り防止制御ECU6は、横加速度(以下、横Gという)センサ7aやヨーレートセンサ7bからの検出信号および各車輪FL、FR、RL、RRに備えられた車輪速度センサ8FL、8FR、8RL、8RRからの検出信号を受け取り、各種物理量を求める。例えば、横滑り防止制御ECU6は、横Gセンサ7aやヨーレートセンサ7bが出力する検出信号に基づいて横Gや車両に実際に発生しているヨーレート(以下、実ヨーレートという)を求めたり、車輪速度センサ8FL〜8RRからの検出信号に基づいて各車輪FL〜RRの車輪速度や車速(推定車体速度)を求める。また、横滑り防止制御ECU6は、後述する横滑り防止制御ECU17とのデータ通信を介して、操舵角センサ21が出力するドライバによるステアリング9の操作量に応じた検出信号に基づいて求めた操舵角を入力する。
また、横滑り防止制御ECU6は、車両安定化制御として横滑り防止制御や横転防止制御を行うべく、ブレーキ液圧制御用アクチュエータ10に対してブレーキ指令信号を出力することで制御対象車輪のブレーキ力を制御したり、後述する電動パワーステアリング(EPS)15を制御するためのステアリングECU18に対してステアリング制御要求を示す指令信号を出力することで操舵輪(本実施形態の場合には前輪FL、FR)のタイヤ角(もしくは操舵トルク)を制御したりする。
横滑り防止制御ECU6が実行する横滑り防止制御は、操舵角と車速に基づいて目標ヨーレートを演算により求める共に、ヨーレートセンサ7bの検出信号に基づいて実際に発生している実ヨーレートを求め、それらの差に基づいて車両が横滑りし得る状況か否かという横滑り傾向を判定し、横滑りし得る状況である場合には、横滑りの形態に応じて制御対象輪を決め、制御対象輪に対してブレーキ力を加えると共に、タイヤ角を調整することで横滑りを防止し、車両の安定化を図るものである。このとき、制御量の決定は、目標ヨーレートと実ヨーレートとの差Δyawに基づいて行われ、これらを利用して横滑り傾向の大きさが求められると共に、その大きさに応じた制御量が求められる。この制御量の求め方の詳細については後で説明する。
また、横滑り防止制御ECU6が実行する横転防止制御は、横滑り防止制御のために求められるブレーキ力やタイヤ角の制御量を補正することにより、横滑り防止制御から円滑に移行できるようにしつつ、横転防止が行えるようなブレーキ力やタイヤ角を発生させるものである。横転傾向の判定は、操舵角や横加速度(以下、横Gという)に基づいて後述する手法により行われ、横転傾向が大きい場合には、横転防止制御が行われる。この横転防止制御のためのブレーキ力やタイヤ角の制御量の求め方の詳細については後で説明する。
ブレーキ液圧制御用アクチュエータ10は、ホイールシリンダ(以下、W/Cという)11FL、11FR、11RL、11RRを自動加圧できるブレーキシステムとして構成されるものである。このブレーキ液圧制御用アクチュエータ10としては、油圧によりW/C圧を発生させる油圧ブレーキシステム、電気的にW/C圧を発生させるブレーキバイワイヤなどの電動ブレーキシステムのいずれも採用できるがいずれも公知のものであるので、ここではブレーキ液圧制御用アクチュエータ10の具体的な構造については省略する。
このようなブレーキ液圧制御用アクチュエータ10により、W/C11FL〜11RRのうち制御対象輪と対応するものが加圧され、それによりキャリパ12FL、12FR、12RL、12RRによってディスクロータ13FL、13FR、13RL、13RRが挟み込まれることで、ブレーキ力が発生させられるようになっている。なお、ここで示したブレーキ液圧制御用アクチュエータ10、W/C11FL〜11RR、キャリパ12FL〜12RR、ディスクロータ13FL〜13RRがブレーキ力を発生させるためのものであり、本発明でいう車両安定化制御手段によって制御されることで横滑り防止制御や横転防止制御の制御対象輪に発生させるブレーキ力を調整する。
電動パワーステアリング15は、ドライバによるステアリング9の操作量等に応じて、前輪FL、FRのタイヤ角を制御するものである。具体的には、電動パワーステアリング15は、シャフト16、電動アクチュエータ17、ステアリングECU18、ステアリングギア機構19、ステアリングリンク機構20および操舵角センサ21を有した構成とされている。
シャフト16は、ドライバのステアリング操作を操舵力として伝えるものであり、ステアリング9側の部分(以下、上部シャフトという)16aとステアリングギア機構19側の部分(以下、下部シャフトという)16bの2部位に分かれており、上部シャフト16aにはドライバ操作によるトルクがそのまま伝えられ、下部シャフト16bには上部シャフト16aに伝えられたトルクと電動アクチュエータ17によるアシスト力とが加算されたトルクが伝えられるようになっている。なお、ステアリング9の操作量は、電動パワーステアリング15に備えられた操舵角センサ21にて検出され、操舵角センサ21の検出信号が横滑り防止制御ECU17に入力されることで操舵角が求められるようになっている。
電動アクチュエータ17は、例えばモータにより構成されており、ステアリングECU18から送られてくる制御信号に応じた駆動力(モータの場合は回転数)を発生させることで、下部シャフト16bを回転駆動するものである。この電動アクチュエータ17の駆動力に応じて下部シャフト16bの回転量が決まる。
ステアリングECU18は、横滑り防止制御ECU6とデータ通信が行えるようにされており、ステアリングECU18から横滑り防止制御ECU6に対してドライバによるステアリング9の操作量に応じたタイヤ角を示すデータを伝えたり、横滑り防止制御ECU6からステアリングECU18に対してステアリング制御要求を示す指令信号を伝えたりできるようになっている。
ステアリングギア機構19は、歯車の組み合わせ、例えばラックアンドピニオン型のもので構成され、下部シャフト16bに伝えられた回転方向の力を下部シャフト16bに対して垂直方向の力に変換する。
ステアリングリンク機構20は、ステアリングギア機構19から伝えられる力をピットマンアームやタイロッドを介してステアリングナックルまで伝え、操舵輪となる左右の前輪FL、FRを同方向に向ける。
このような構成により、操舵角センサ21により検出されたドライバによるステアリング9の操作量等に応じてステアリングECU18から制御信号が出力されると、電動アクチュエータ17の駆動力に基づいて下部シャフト16bが回転させられる。この下部シャフト16bの回転方向の力がステアリングギア機構19にて下部シャフト16b対して垂直方向の力に変換され、その力がステアリングリンク機構20に伝わることで、前輪FL、FRの向きが制御され、タイヤ角が制御される。
なお、電動パワーステアリング15として、下部シャフト16bに対してアシスト力を加えるコラム式やピニオン式についてだけでなく、ラック位置でアシスト力を加えるものも挙げられる。このような電動パワーステアリング15を用いても良い。
このようにして、車両安定化制御として横滑り防止制御および横転防止制御を実現する車両安定化制御装置が備えられたシステムが構成されている。続いて、本実施形態の車両安定化制御装置が行う横滑り防止制御および横転防止制御について、図2を参照して説明する。
図2は、車両安定化制御のフローチャートであり、横滑り防止制御ECU6に予め記憶しておいたプログラムを実行することにより本車両安定化制御が行われる。この車両安定化制御は、車両に備えられた図示しないイグニッションスイッチがオンされたとき、もしくは車両走行中に、所定の演算周期ごとに実行される。
まず、ステップ100では、入力処理を実行する。ここでいう入力処理とは、各車輪速度センサ8FL〜8RRの検出信号の入力、ステアリングECU18から操舵角センサ21の検出信号に基づいて求めた操舵角および電動アクチュエータ17へ出力する制御信号に対応するタイヤ角の入力、および、ヨーレートセンサ7bの検出信号の入力を行うものである。
続く、ステップ110では、ステップ100の入力処理にて入力された検出信号などに基づいて、車両状態量を表す様々な物理量を取得するものである。まず、入力処理にて入力された車輪速度センサ8FL〜8RRの検出信号に基づいて各車輪FL〜RRの車輪速度を求めると共に、横Gセンサ7aやヨーレートセンサ7bの検出信号に基づいて横Gや実ヨーレートを求め、操舵角およびタイヤ角に関してはステアリングECU18から送られてくるデータにより取得する。
そして、各車輪FL〜RRの車輪速度に基づき周知の手法により車速を求め、操舵角に基づいて演算による目標ヨーレートを求める。
次に、ステップ120に進み、制御量演算処理を行う。ここでいう制御量演算処理とは、横滑り傾向が発生したときに実行する横滑り防止制御を行うための制御量を演算するものである。なお、後述する処理で横滑り傾向が判定され、その判定結果に応じて横滑り防止制御が実行される。
本実施形態の車両安定化制御装置が実行する横滑り防止制御では、上述したように、タイヤ角(もしくは操舵トルク)の制御および所望の制御対象輪にブレーキ力を発生させるという制御を行う。この横滑り防止制御としては、周知となっている様々な形態のいずれを用いても良いが、以下では、その一例を挙げて説明する。
タイヤ角とブレーキ力の制御量は、横滑りの形態を示すヨーレート差Δyaw、すなわち操舵角に基づいて演算により求めた目標ヨーレートとヨーレートセンサ7bの検出信号に基づいて求めた実ヨーレートとの差に基づいて求められる。つまり、横滑りの形態としては、アンダーステア状態とオーバステア状態が考えられ、アンダーステア状態の場合にはドライバによる操舵に対して実際の旋回が小さくなるため、ヨーレート差Δyawは正の値(目標ヨーレート>実ヨーレート)となり、オーバステア状態の場合にはドライバによる操舵に対して実際の旋回が大きくなるため、ヨーレート差Δyawは負の値(目標ヨーレート<実ヨーレート)となる。
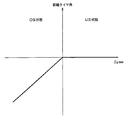
このため、タイヤ角の制御量Bdに関しては、例えば、図3に示すヨーレート差−タイヤ角の特性マップを利用して求められる。この特性マップでは、横滑りの形態がアンダーステア(US)状態であるか、それともオーバステア(OS)状態であるかによって、異なる特性線が規定されており、アンダーステア状態の場合には、ドライバによってステアリングがより大きくなる方向に切られてもタイヤ角が大きくならないような特性線、オーバステア状態の場合には、ヨーレート差Δyawが大きくなればなるほどタイヤ角の補正量が大きくなるように、つまりドライバのステアリング操作よりもタイヤ角が小さくなるようにし、そのドライバのステアリング操作に対応するタイヤ角に対して小さくする量(=補正量)をヨーレート差Δyawが大きくなるほど大きくなるようにしている。
一方、ブレーキ力の制御量Adに関しては、ヨーレート差Δyawに基づいてアンダーステア状態であるかオーバステア状態であるかが判るため、その横滑り形態に応じて制御対象輪およびその制御対象輪に発生させるブレーキ力の大きさが決められる。例えば、オーバステア状態の場合には旋回外輪を制御対象輪、アンダーステア状態の場合には旋回内輪を制御対象輪として、ブレーキ力が加えられる。このとき、旋回外輪もしくは旋回内輪の前輪FL、FRと後輪RL、RRのいずれを制御対象輪としても良いが、例えば実ヨーレートの大きさなどに応じて制御対象輪を決定することもできる。
なお、ブレーキ力の制御量Adの大きさに関しては、周知となっている様々な手法のいずれを用いて求めても良いが、アンダーステア状態とオーバステア状態のいずれかに応じて一義的に決まる固定値としても良いし、ヨーレート差Δyawの大きさが大きくなるほどブレーキ力が大きくなるようにしても良い。
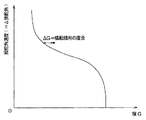
この後、ステップ130に進み、横転傾向が大きくなったか否かを判定する。横転傾向は、操舵角と横Gに基づいて判定される。具体的には、横転傾向は、図4に示す横転傾向マップのように表され、横Gが大きいほど、操舵角が小さくても転覆傾向は大きく、操舵角が大きいほど、横Gが小さくても転覆傾向は大きいという特性を有している。図4に示される特性曲線は、横転傾向が無い状態と有る状態の境界線を示すものであり、横転傾向が高まるほど横転する可能性が高くなることを示している。
横G−操舵角特性マップに示された特性曲線上において、今回の演算周期で求められた操舵角速度(Δ操舵角)と対応する横Gを参照横Gとして求めると共に、その参照横Gと今回の演算周期で求められた横Gとの差を横G差ΔG(=今回求めた横G−参照横G)として求める。この横G差ΔGが横転傾向の度合いを示すパラメータとなるものである。具体的には、横G差ΔGが小さい方が横転傾向が小さく、これが大きくなればなるほど、横転傾向の度合いが高くなることを示している。なお、横G差ΔGが負の値となるとき、すなわち今回求めた横Gが参照横Gよりも小さくなるような場合、もしくは、ゼロとなるときには、横転傾向は発生していないことを示している。
したがって、ステップ130では、横転傾向を示す横G差ΔGが判定しきい値Gaを超えているか否かを判定する。そして、横G差ΔGが判定しきい値Gaを超える場合には、横転傾向が大きくなったものと判定され、超えなければ横転傾向は大きくないものと判定される。なお、判定しきい値Gaは、ノイズ的に横転傾向が発生したと判定されてしまうことを防止するため等を考慮して設けられたものであり、任意の値に設定される。
そして、通常、まず横滑り傾向が発生してからでないと横転傾向が大きくなったと判定されるほど横G差ΔGが大きくならないため、ステップ130では否定判定され、ステップ140に進む。
ステップ140では、横滑り傾向があるか否かが判定される。横滑り傾向は、上述したように、例えば目標ヨーレートと実ヨーレートとの差Δyawにて表され、このヨーレート差Δyawが判定しきい値Yaを超える場合には、横滑り傾向有りと判定され、超えなければ横滑り傾向無しと判定される。
そして、ステップ140で否定判定された場合には、横滑り傾向が無いため、そのまま横滑り防止制御が行われず、ステップ140で肯定判定された場合には、横滑り傾向が有るため、ステップ150に進んで横滑り防止制御を実行する。具体的には、横滑り防止制御を実行するために、上述したステップ120で求めたブレーキ力の制御量Adおよびタイヤ角の制御量Bdをそのまま最終的に出力するブレーキ力の制御量A(=Ad)およびタイヤ角の制御量B(=Bd)として設定する。
この後、ステップ160に進み、設定されたブレーキ力の制御量Aおよびタイヤ角の制御量Bを発生させるための出力処理を行う。具体的には、ブレーキ力の制御量Aと対応するブレーキ力を制御対象輪に対して発生させるためのブレーキ指令信号をブレーキ液圧制御用アクチュエータ10に対して出力する。これにより、制御対象輪に備えられたW/C11FL〜11RRが加圧され、それによりキャリパ12FL〜12RRによってディスクロータ13FL〜13RRが挟み込まれることで、制御量Aと対応するブレーキ力が発生させられる。また、タイヤ角の制御量Bと対応するタイヤ角に制御するために、ステアリングECU18に対してステアリング制御要求を示す指令信号を出力する。これにより、電動アクチュエータ17の駆動力が制御され、制御量Bと対応するタイヤ角に制御される。このようにして、横滑り防止制御が実行され、横滑り傾向が解消されていくことになる。
一方、横滑り傾向が発生している場合において、横転傾向が大きくなると、ステップ130で否定判定される。そして、ステップ170に進み、横転防止制御を実行する。具体的には、横滑り防止制御のために予めステップ120で演算してあるブレーキ力の制御量Adおよびタイヤ角の制御量Bdを補正し、横転防止制御のための制御量を求める。
すなわち、横転傾向が大きくなったと判定されると、今回の演算周期で求められていた横滑り防止制御によるブレーキ力の制御量Adを大きくする補正を行うと共に、タイヤ角の制御量Bdを小さくする補正を行う。
このとき、ブレーキ力の制御量Adの補正値もしくは補正係数(>1)を固定値としておき、ブレーキ力の制御量Adに補正値分を加算したり、ブレーキ力の制御量Adに補正係数を掛け合わせることでブレーキ力の制御量Adよりも大きな制御量Aを設定することができるが、下記のように横転傾向の度合いに応じてブレーキ力の制御量Aを設定すると好ましい。同様に、タイヤ角の制御量Bdに関しても、補正値もしくは補正係数(<1)を固定値としておき、タイヤ角の制御量Bdに対して補正値分を減算したり、タイヤ角の制御量Bdに対して補正係数を掛け合わせることでタイヤ角の制御量Bdよりも小さな制御量Bを設定することもできるが、下記のように横転傾向の度合いに応じてブレーキ力の制御量Aを設定すると好ましい。
図5(a)、(b)は、横転傾向の度合いに対する補正後のブレーキ力の制御量Aと補正後のタイヤ角の制御量Bの関係を示した特性図である。
横転傾向の度合いは、上述したように横G差ΔGにより表すことができ、横G差ΔGが大きくなるほど大きくなる。
このため、図5(a)で示すように、横G差ΔGが大きくなるほどブレーキ力の制御量Aが大きくなるように、横G差ΔGに対する補正後のブレーキ力の制御量Aの関係を示す特性線が規定されている。ただし、横G差ΔGが第1しきい値以上になるまではブレーキ力の制御量Aは制御量Adに対する補正を行っていない状態の値としてある。これは、上述したステップ130における横転傾向が高くなったと判定する判定しきい値Gaと対応したものであり、例えば、横転しきい値と同じもしくはそれよりも所定値大きい値として第1しきい値が規定される。
また、図5(b)で示すように、横G差ΔGが大きくなるほどタイヤ角の制御量Bが小さくなるように、横G差ΔGに対する補正後のタイヤ角の制御量Bの関係を示す特性線が規定されている。ただし、横G差ΔGが第2しきい値以上になるまではブレーキ力の制御量Bは制御量Bdに対する補正を行っていない状態の値としてある。これも、横G差ΔGがノイズ的に発生したような場合にまでブレーキ力の制御量Bdを補正してしまうのを防止するためである。
なお、タイヤ角の制御量Bは、横G差ΔGが所定値に達したときに最小値となるように規定されている。このようにタイヤ角の制御量Bが最小値とされる横G差ΔGの値は、現実的に発生し得る横G差ΔGの最大値を想定したものであり、このときのタイヤ角の制御量Bがタイヤ角として発生させるのが好ましい最小値(制御最小値)とされる。このような最小値を設定することにより、横滑り防止制御および横転防止制御の各制御間のつながりが円滑に行われるようにすることが可能となる。
ブレーキ力の制御量Adの補正を開始する第1しきい値とタイヤ角の制御量Bdの補正を開始する第2しきい値の大小関係については、第1しきい値>第2しきい値、第1しきい値=第2しきい値、第1しきい値<第2しきい値のいずれであっても良い。ただし、第1しきい値>第2しきい値とすれば、ブレーキ力の制御量Adの補正よりも先にタイヤ角の制御量Bの補正が行われた後で、ブレーキ力の制御量Adの補正が行われることになる。このため、まずタイヤ角の補正によって車両の進行方向の補正を優先的に行い、その後、ブレーキ力の制御量Adの補正を行うようにできるため、第1しきい値<第2しきい値とした場合と比べて、より車両が安定化を優先した制御を行うことができる。
なお、図5(a)、(b)では、横G差ΔGに対する補正後のブレーキ力の制御量Aと補正後のタイヤ角の制御量Bの特性を示したが、同様の特性線を補正前のブレーキ力の制御量Adや補正前のタイヤ角のBdの補正係数として用いることもできる。この場合には、補正前のブレーキ力の制御量Adや補正前のタイヤ角のBdに対して補正係数を掛け合わせることにより、補正後のブレーキ力の制御量Aと補正後のタイヤ角の制御量Bを求めることができる。
このようにして、横転防止制御のためのブレーキ力の制御量Aおよびタイヤ角Bが設定されると、その後、ステップ160に進み、上記と同様の手法により、設定されたブレーキ力の制御量Aおよびタイヤ角の制御量Bを発生させるための出力処理を行う。これにより、制御対象輪に備えられたW/C11FL〜11RRが加圧され、それによりキャリパ12FL〜12RRによってディスクロータ13FL〜13RRが挟み込まれることで、制御量Aと対応するブレーキ力が発生させられる。また、電動アクチュエータ17の駆動力が制御され、制御量Bと対応するタイヤ角に制御される。このようにして、横転防止制御が実行され、横転傾向が解消されていくことになる。
なお、横転防止制御が実行され、横転傾向が解消してステップ130で再び否定判定されると、再度横滑り傾向が解消するまで横滑り防止制御が実行されることになる。
以上の説明したように、本実施形態の車両挙動安定化装置によれば、横転傾向の発生が検出された場合に、横滑り防止制御の為に演算されていたブレーキ力の制御量Adやタイヤ角の制御量Bdを補正し、横転防止制御の為のブレーキ力の制御量Aおよびタイヤ角の制御量Bを求めるようにしている。
このため、横滑り防止制御中に横転傾向が発生した場合に、横滑り防止制御よりも優先して横転防止制御を行うことができ、横転傾向を抑制することが可能となる。
また、このような横転防止抑制のための制御量A、Bが横滑り防止制御中のブレーキの制御量Adやタイヤ角の制御量Bdを補正することにより求められ、横転傾向の発生がなくなったときに、再び横滑り防止制御に戻すような制御形態としている。
このため、横滑り防止制御から横転防止制御に円滑に移行できると共に、横転防止制御から横滑り防止制御へも円滑に行こうできるようにすることが可能となる。
(他の実施形態)
上記実施形態では、横転防止制御の際に、横滑り防止制御のためのブレーキ力の制御量Adとタイヤ角の制御量Bdの双方を補正するようにしているが、少なくともタイヤ角の制御量Bdを小さくしてタイヤ角を戻すようにすることで、横転防止制御を実行することが可能となる。
上記実施形態では、横転防止制御の際に、横滑り防止制御のためのブレーキ力の制御量Adとタイヤ角の制御量Bdの双方を補正するようにしているが、少なくともタイヤ角の制御量Bdを小さくしてタイヤ角を戻すようにすることで、横転防止制御を実行することが可能となる。
また、上記実施形態では、前輪FL、FRのみを操舵輪としてタイヤ角を調整するものについて説明したが、前輪FL、FRと共に後輪RL、RRもタイヤ角が変わるような形態、例えば4WSを採用する車両に関しては、前後タイヤ角の制御量を補正することにより、上記実施形態と同様の効果を得ることが可能である。この場合、後輪RL、RRのタイヤ角の調整に関しては、例えば、図6に示すヨーレート差−タイヤ角の特性マップのように、オーバステア状態の場合にはタドライバによってステアリングがより大きくなる方向に切られてもタイヤ角が大きくならないような特性線、アンダーステア状態の場合には、ヨーレート差Δyawが大きくなればなるほどタイヤ角の補正量が大きくなるようにすると良い。
さらに、上述したヨーレートや横Gなどの各物理量の検出手法は一例を挙げたものであり、代替可能な他の様々な手法によって各物理量を検出しても良い。例えば、実ヨーレートをヨーレートセンサ7bの検出信号に基づいて求めたが、旋回時における旋回内外の駆動輪の車輪速度差から求めても良い。
なお、図2中に示したステップは、各種処理を実行する手段に対応するものである。具体的には、ステップ110に示す処理を実行する部分が車両状態判定手段、ステップ120、140、150の処理を実行する部分が横滑り防止制御手段、ステップ120、130、170の処理を実行する部分が横転防止制御手段に相当する。
7a…横Gセンサ、7b…ヨーレートセンサ、8…ステアリング操作量センサ、8FL〜8RR…車輪速度センサ、9…ステアリング、10…ブレーキ液圧制御用アクチュエータ、11FL〜12RR…W/C、12FL〜12RR…キャリパ、13FL〜13RR…ディスクロータ、15…電動パワーステアリング、16…シャフト、16a…上部シャフト、16b…下部シャフト、17…電動アクチュエータ、18…ステアリングECU、19…ステアリングギア機構、20…ステアリングリンク機構、21…操舵角センサ、FL〜RR…各車輪。
Claims (6)
- 車両の横滑り傾向を表すパラメータおよび横転傾向を表すパラメータに基づいて車両の横滑り傾向および横転傾向を判定する車両状態判定手段(110)と、
前記横滑り傾向が発生したときに、前記横滑り傾向を表すパラメータに基づいて所定の制御対象輪に対するブレーキ力の制御量(Ad)および操舵輪のタイヤ角の制御量(Bd)を演算し、この演算結果に基づいて前記制御対象輪のブレーキ力および操舵輪のタイヤ角を制御する横滑り防止制御手段(120、140、150)と、
前記横転傾向が発生したときに、前記横滑り防止制御手段にて演算された前記タイヤ角の制御量(Bd)を該タイヤ角が小さくなるように補正し、この補正結果に基づいて操舵輪のタイヤ角を制御する横転防止制御手段(120、130、170)と、を具備することを特徴とする車両安定化制御装置。 - 前記横転防止制御手段は、前記横転傾向の度合いが高くなるほど前記タイヤ角が小さくなるように前記タイヤ角の制御量を補正することを特徴とする請求項1に記載の車両安定化制御装置。
- 前記横転防止制御手段は、前記横滑り防止手段にて演算された前記ブレーキ力の制御量(Ad)を該ブレーキ力が大きくなるように補正することを特徴とする請求項1または2に記載の車両安定化制御装置。
- 前記横転防止制御手段は、前記横転傾向が発生したときに、その横転傾向の度合いが高くなるほど前記ブレーキ力が大きくなるように、出力対象とする前記ブレーキ力の制御量を変化させることを特徴とする請求項3に記載の車両安定化制御装置。
- 前記横転防止制御手段は、前記タイヤ角の制御量の補正と、前記ブレーキ力の制御量の補正を同時に行うことを特徴とする請求項3または4に記載の車両安定化制御装置。
- 前記横転防止制御手段は、前記タイヤ角の制御量の補正を行った後に、前記ブレーキ力の制御量の補正を行うことを特徴とする請求項3または4に記載の車両安定化制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006197962A JP2008024125A (ja) | 2006-07-20 | 2006-07-20 | 車両挙動安定化制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006197962A JP2008024125A (ja) | 2006-07-20 | 2006-07-20 | 車両挙動安定化制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2008024125A true JP2008024125A (ja) | 2008-02-07 |
Family
ID=39115209
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006197962A Pending JP2008024125A (ja) | 2006-07-20 | 2006-07-20 | 車両挙動安定化制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2008024125A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009192251A (ja) * | 2008-02-12 | 2009-08-27 | Advics Co Ltd | 異常判定装置及び異常判定方法 |
| JP2012051456A (ja) * | 2010-09-01 | 2012-03-15 | Hitachi Automotive Systems Ltd | ブレーキ制御装置 |
| CN111601729A (zh) * | 2018-01-19 | 2020-08-28 | 蒂森克虏伯普利斯坦股份公司 | 用于借助转矩矢量分配防止机动车辆的侧翻的方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60161256A (ja) * | 1984-01-31 | 1985-08-22 | Nissan Motor Co Ltd | 車両の補助操舵方法 |
| JP2001219840A (ja) * | 1999-12-21 | 2001-08-14 | Ford Global Technol Inc | 自動車の横転安定性の制御 |
| JP2004209998A (ja) * | 2002-12-26 | 2004-07-29 | Mitsubishi Fuso Truck & Bus Corp | 車両の統合制御装置 |
-
2006
- 2006-07-20 JP JP2006197962A patent/JP2008024125A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60161256A (ja) * | 1984-01-31 | 1985-08-22 | Nissan Motor Co Ltd | 車両の補助操舵方法 |
| JP2001219840A (ja) * | 1999-12-21 | 2001-08-14 | Ford Global Technol Inc | 自動車の横転安定性の制御 |
| JP2004209998A (ja) * | 2002-12-26 | 2004-07-29 | Mitsubishi Fuso Truck & Bus Corp | 車両の統合制御装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009192251A (ja) * | 2008-02-12 | 2009-08-27 | Advics Co Ltd | 異常判定装置及び異常判定方法 |
| JP2012051456A (ja) * | 2010-09-01 | 2012-03-15 | Hitachi Automotive Systems Ltd | ブレーキ制御装置 |
| CN111601729A (zh) * | 2018-01-19 | 2020-08-28 | 蒂森克虏伯普利斯坦股份公司 | 用于借助转矩矢量分配防止机动车辆的侧翻的方法 |
| CN111601729B (zh) * | 2018-01-19 | 2023-09-05 | 蒂森克虏伯普利斯坦股份公司 | 防止机动车辆的侧翻的方法以及线控转向系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4003627B2 (ja) | 車輌用操舵制御装置 | |
| JP4267294B2 (ja) | 車輌用制動制御装置 | |
| US7997373B2 (en) | Steering control device for vehicle | |
| JP4866580B2 (ja) | 車両の走行制御装置 | |
| JP4137041B2 (ja) | 車輌の制御装置 | |
| JP4600126B2 (ja) | 車両姿勢制御装置 | |
| JP4207698B2 (ja) | 車両の横転防止装置 | |
| JP2008024125A (ja) | 車両挙動安定化制御装置 | |
| JP5333245B2 (ja) | 車両挙動制御装置 | |
| JP2005280688A (ja) | 車輌の挙動制御装置 | |
| JP5298950B2 (ja) | 車両用操舵制御装置および車両用操舵制御方法 | |
| JP5228815B2 (ja) | ブレーキ制御装置 | |
| JP4736763B2 (ja) | 車両安定化制御装置 | |
| JP2004255943A (ja) | 車輌の制御装置 | |
| JP2006069497A (ja) | ステアリング装置 | |
| JP5460325B2 (ja) | 車輪を選択的に制動する第1手段と、後輪を旋回させる第2手段とを備えた自動車の進路を補正する装置 | |
| JP5390289B2 (ja) | 車両の後輪操舵制御装置 | |
| JP5297037B2 (ja) | 車両の操舵制御装置 | |
| JP2005343256A (ja) | 車両の挙動制御装置 | |
| JP2010058724A (ja) | 車両挙動制御装置 | |
| JP2008081115A (ja) | 車輌の制御装置 | |
| JP4137086B2 (ja) | 車輌の走行制御装置 | |
| JP4735230B2 (ja) | 車両安定化制御装置 | |
| JP4839817B2 (ja) | 車両安定化制御装置 | |
| JP4572915B2 (ja) | 車輌用操舵制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090306 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110414 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110419 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20111011 |