JP2007196929A - スタック脱出制御装置 - Google Patents
スタック脱出制御装置 Download PDFInfo
- Publication number
- JP2007196929A JP2007196929A JP2006020056A JP2006020056A JP2007196929A JP 2007196929 A JP2007196929 A JP 2007196929A JP 2006020056 A JP2006020056 A JP 2006020056A JP 2006020056 A JP2006020056 A JP 2006020056A JP 2007196929 A JP2007196929 A JP 2007196929A
- Authority
- JP
- Japan
- Prior art keywords
- stack
- vehicle
- control device
- wheel
- escape control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 58
- 238000001514 detection method Methods 0.000 claims description 16
- 230000008878 coupling Effects 0.000 abstract description 27
- 238000010168 coupling process Methods 0.000 abstract description 27
- 238000005859 coupling reaction Methods 0.000 abstract description 27
- 238000000034 method Methods 0.000 description 34
- 238000010586 diagram Methods 0.000 description 4
- 230000007704 transition Effects 0.000 description 4
- 239000000446 fuel Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
Images








Landscapes
- Arrangement And Driving Of Transmission Devices (AREA)
Abstract
【課題】スタックからの脱出を的確に行わせることを可能とする。
【解決手段】車両の後輪へのトルク伝達を調節可能なトルク伝達カップリング1と、車両の走行状態を検出し前輪及び後輪の車輪速とアクセル開度と経過時間とに基づき前輪の車輪速及びアクセル開度が一定値以上で後輪の車輪速が一定値以下である状態が一定時間継続したとき車両がスタック状態であるとしてトルク伝達カップリング1のスタック脱出制御を行わせるコントローラ9とを備えたため、スタック脱出制御を自動で行わせることができ、適切な脱出の機会を逃すこと無く、スタック状態から的確に脱出させることを特徴とする。
【選択図】図3
【解決手段】車両の後輪へのトルク伝達を調節可能なトルク伝達カップリング1と、車両の走行状態を検出し前輪及び後輪の車輪速とアクセル開度と経過時間とに基づき前輪の車輪速及びアクセル開度が一定値以上で後輪の車輪速が一定値以下である状態が一定時間継続したとき車両がスタック状態であるとしてトルク伝達カップリング1のスタック脱出制御を行わせるコントローラ9とを備えたため、スタック脱出制御を自動で行わせることができ、適切な脱出の機会を逃すこと無く、スタック状態から的確に脱出させることを特徴とする。
【選択図】図3
Description
本発明は、車両がスタックしたときの脱出制御を可能とするスタック脱出制御装置に関する。
従来、4輪駆動車では、運転者のボタン操作で「オート」「2WD」「ロック」の切り替えができるようにしたものがある。ボタン操作で「オート」が選択されたときは、走行条件に応じて最適な4輪駆動走行が行われるようにクラッチが締結制御される。同「2WD」が選択されたときは、クラッチが切断され、駆動輪のみの2輪駆動走行となる。同「ロック」が選択されたときは、駆動輪がスリップして車両がスタック状態となったとき、クラッチを強く締結して従動輪へトルクを伝達し、スタック状態からの脱出を行わせることができる。
しかし、車両がスタックしてからボタン操作で「ロック」が選択されるなどすると、適切な脱出の機会を逃す可能性があり、手動の切替ではスタックからの脱出性に問題を残すことになる。
鉄道日本社株式会社発行の「自動車工学」2000年12月号第38頁〜同43頁
解決しようとする問題点は、手動の切替ではスタックからの脱出性に問題を残す点である。
本発明は、スタックからの脱出を的確に行わせるために、車両の従動輪へのトルク伝達を調節可能な伝達伝達トルク調節手段又は車両の左右駆動輪間の差動を調節可能な差動調節手段と、車両の走行状態を検出する走行状態検出手段と、前記走行状態検出手段が車両のスタック状態を検出したとき前記伝達トルク調節手段又は差動調節手段のスタック脱出制御を行わせる制御手段とを備えたことを最も主要な特徴とする。
本発明のスタック脱出制御装置は、車両の従動輪へのトルク伝達を調節可能な伝達トルク調節手段又は車両の左右駆動輪間の差動を調節可能な差動調節手段と、車両の走行状態を検出する走行状態検出手段と、前記走行状態検出手段が車両のスタック状態を検出したとき前記伝達トルク調節手段又は差動調節手段のスタック脱出制御を行わせる制御手段とを備えたため、スタック脱出制御を自動で行わせることができ、スタック状態から的確に脱出を行わせることができる。
スタックからの脱出性を的確に行わせるという目的を、走行状態検出手段と制御手段とにより実現した。
[四輪駆動車]
図1は、本発明の実施例1を適用した車両に係りフロント・エンジン、フロント・ドライブ・ベース(FFベース)の4輪駆動車のスケルトン平面図である。
図1は、本発明の実施例1を適用した車両に係りフロント・エンジン、フロント・ドライブ・ベース(FFベース)の4輪駆動車のスケルトン平面図である。
図1のトルク伝達カップリング1は、スタック脱出制御装置の伝達トルク調節手段として機能し、アクチュエータとして電磁石を用いた電磁クラッチなどにより構成されている。トルク伝達カップリング1は、リヤ・デファレンシャル装置3の入力側において、回転軸5及びドライブ・ピニオン・シャフト7間に介設されている。トルク伝達カップリング1は、後述するコントローラ9による電磁石の通電制御等により締結制御される構成となっている。
前記ドライブ・ピニオン・シャフト7のドライブ・ピニオン・ギヤ11は、リヤ・デファレンシャル装置3のリング・ギヤ13に噛み合っている。リヤ・デファレンシャル装置3は、デフ・キャリヤ15に回転自在に支持されている。リヤ・デファレンシャル装置3には、左右のアクスル・シャフト17,19を介して左右の後輪21,23が連動連結されている。
前記回転軸5には、ユニバーサル・ジョイント25を介してプロペラ・シャフト27が結合されている。プロペラ・シャフト27には、ユニバーサル・ジョイント29を介して、トランスファ31の出力軸33が結合されている。
前記出力軸33の傘歯車35は、伝動軸37の傘歯車39に噛み合っている。伝動軸37は、フロント・デファレンシャル装置41のデフ・ケース43側に設けられ、連動構成されている。
前記フロント・デファレンシャル装置41は、エンジン45からトランス・ミッション47を介してリング・ギヤ49にトルクが入力され、回転駆動されるようになっている。フロント・デファレンシャル装置41には、左右のアクスル・シャフト51,53を介して、左右の前輪55,57が連動連結されている。
従って、エンジン45からトランス・ミッション47を介してフロント・デファレンシャル装置41のリング・ギヤ49にトルクが入力されると、一方ではアクスル・シャフト51,53を介して左右の前輪55,57へトルク伝達が行われる。また他方では、デフ・ケース43、伝動軸37、傘歯車39、35を介して出力軸33へトルク伝達が行われる。
前記出力軸33からは、ユニバーサル・ジョイント29、プロペラ・シャフト27、ユニバーサル・ジョイント25、回転軸5を介してトルク伝達カップリング1へトルクが入力される。
前記トルク伝達カップリング1がトルク伝達状態であれば、ドライブ・ピニオン・シャフト7、ドライブ・ピニオン・ギヤ11を介して、リヤ・デファレンシャル装置3のリング・ギヤ13にトルク伝達が行われる。リヤ・デファレンシャル装置3からは、左右のアクスル・シャフト17,19を介して、左右の後輪21,23へトルク伝達が行われる。
従って、トルク伝達カップリング1がトルク伝達状態であるときには、前輪59,61、後輪21,23によって、4輪駆動状態で走行することができる。トルク伝達カップリング1が、トルク伝達状態にないときには、前輪59,61による2輪駆動状態で走行することができる。
2輪駆動状態と4輪駆動状態との選択は、運転席のボタン操作等で行うようになっている。選択された「オート・モード」により4輪駆動状態となり、各種センサの検出に基づきコントローラ9により各走行条件下で最適な走行性能を得るための制御が行われる。「2WD」が選択される2輪駆動状態となり、「ロック・モード」が選択されると「オート・モード」よりも出力トルクをアップした制御が行われる。
さらに、「オート・モード」において、車両のスタック状態が検出されるとトルク伝達カップリング1の「スタック脱出制御」が行われる。「ロック・モード」においても、トルク伝達カップリング1の最大出力値(最大制御出力値)まで制御電流値を印加する余裕があれば、「スタック脱出制御」へ移行させることができる。
前記コントローラ9には、各種センサの検出値として前後輪55,57,21,23の各車輪回転数59、出力軸33及びドライブ・ピニオン・シャフト7の回転数である前輪後輪側各回転数61、アクセル開度63、ステアリング角(ハンドル角)65、車両に働く横G67、同前後G69が入力されるようになっている。なお、各車輪回転数59と前輪後輪側各回転数61とは、何れか一方を用いることでトルク伝達カップリング1の差回転を算出することができる。これらの入力に基づき、トルク伝達カップリング1の操作力又は操作量a、スロットル開度又は燃料供給量(電気自動車の場合はモータへの電流供給量)b、ブレーキ操作力c、トランス・ミッション47の変速比dの出力が行われる。この出力により「オート・モード」「スタック脱出制御」が行われる。
図2は、制御ブロック図である。
図2のように、コントローラ9に、車両入力信号71として各輪車輪速、前後差回転、車速、アクセル開度、トルク出力値(コントローラ9からの出力指示値)、ハンドル角、前後横Gが入力され、コントローラ9において車両のスタック状態が判断されると制御対象ユニットであるトルク伝達カップリング1の「スタック脱出制御」が行われる。すなわち、コントローラ9は、本実施例において走行状態検出手段及びスタック脱出制御を行う制御手段を構成している。前記車速は、従動輪である後輪21,23の左右回転の平均値から算出している。しかし、種々の既存の検出手段を用いることもできる。
図3は、オート・モードとスタック脱出制御との切り替えの機能ブロック図である。
図3のように、各種センサの検出値として各車両入力信号71が演算部73に入力され、演算部73で通常走行時の出力計算が行われ、オート・モード制御部75へ出力される。オート・モード制御部75では、各走行条件下で最適な走行性能を得るための制御出力を行ない、この出力によりトルク伝達カップリング1の「オート・モード」の制御が行われる。
また、車輪回転数59として右前輪車輪速77及び左前輪車輪速79が駆動輪車輪速演算部81に入力され、同右後輪車輪速83及び左後輪車輪速85が従動輪車輪速演算部87に入力される。駆動輪車輪速演算部81及び従動輪車輪速演算部87での演算結果が前後差回転演算部89に入力され、前後差回転演算部89の演算結果がスタック判断部91へ入力される。スタック判断部91では、前後差回転演算部89の演算結果に加え、駆動輪車輪速演算部81及び従動輪車輪速演算部87からの演算結果とアクセル開度63の検出値とを取り込み、車両のスタック状態を判断し、スタック脱出制御部93へ出力する。スタック脱出制御部93では、通常の「オート・モード」を、強制的に「スタック脱出制御」に切り替え、トルク伝達カップリング1の「スタック脱出制御」を行なう。
「スタック脱出制御」では、「オート・モード」の出力値に定数を掛けて出力し、或いは図4のようなスタック脱出制御用の出力マップを用いて制御することができる。
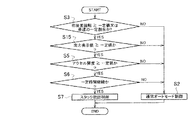
図5は、スタック脱出制御の移行フローチャート、図6は、同解除フローチャートである。
図5のフローチャートでは、駆動輪である前輪55,57がスリップして回転し、従動輪である後輪21,23が非回転又は非回転と見なし得るとき車両がスタック状態であると検出してスタック脱出制御を行う。このフローチャートは、エンジンが始動されると実行され、ステップS1では、「駆動輪車輪速≧一定値」の判断処理が行われる。この判断は、スタック判断部91が、駆動輪車輪速演算部81からの演算結果の入力に基づき行い、「駆動輪車輪速≧一定値」で無ければ(NO)、ステップS2へ移行し、「駆動輪車輪速≧一定値」であれば(YES)、ステップS3へ移行する。
ステップS2では、「通常オート・モード制御」が行われる。この制御では、オート・モード制御部75により、各走行条件下で最適な走行性能を得るための制御出力を行ない、この出力によりトルク伝達カップリング1の「オート・モード」の制御が行われる。
ステップS3では、「前後差回転≧一定値又は車速の一定割合」の判断処理が行われる。この処理は、従動輪である後輪21,23が一定車輪速以下であることを判断するものである。スタック判断部91が、前後差回転演算部8からの演算結果の入力に基づき行い、「前後差回転≧一定値又は車速の一定割合」であれば(YES)、ステップS4へ移行し、「前後差回転≧一定値又は車速の一定割合」で無ければ(NO)、ステップS2へ移行する。前記車速の一定割合とは、車速に応じて決められた値であり、例えば、車速が100km/hで前輪55,57及び後輪21,23間の差回転ΔNが10rpm、10km/hで差回転ΔNが3rpm等と設定されている。
ステップS4では、「車速(従動輪車輪速)≦一定値」の判断処理が行われる。この判断は、スタック判断部91が、従動輪車輪速演算部87からの演算結果の入力に基づき行い、「車速(従動輪車輪速)≦一定値」であれば(YES)、ステップS5へ移行し、「車速(従動輪車輪速)≦一定値」で無ければ(NO)、ステップS2へ移行する。
ステップS5では、「アクセル開度≧一定値」の判断処理が行われる。この判断は、スタック判断部91が、アクセル開度63の入力に基づき行い、「アクセル開度≧一定値」であれば(YES)、ステップS6へ移行し、「アクセル開度≧一定値」で無ければ(NO)、ステップS2へ移行する。「アクセル開度≧一定値」と判断されれば、スタック状態において車両が停止していても、運転者は走行の意志ありと判断することができる。
ステップS6では、「一定時間継続」の判断処理が行われる。この判断は、コントローラ9のタイマセットにより行われ、タイマの経過時間が設定した一定時間経過すれば(YES)、ステップS7へ移行し、一定時間経過しなければ(NO)、ステップS2へ移行する。このタイマは、ステップS1〜S5の条件が一つでも満たされずステップS2へ移行するときは、タイマ・リセットとなる。
ステップS7では、「スタック脱出制御」が行われる。この制御では、図4の制御マップを用いるなどしてスタック脱出制御部9によりトルク伝達カップリング1の「スタック脱出制御」が行われる。
図5のフローチャートにおいては、スタック脱出制御への移行のための条件判断は、少なくともステップS1,S5,S6が存在すればよく、ステップS3,S4は、より高度に制御するために付加されるものである。
図6のフローチャートの実行では、ステップS11において「スタック脱出制御ON」の判断処理が実行される。この処理において、「スタック脱出制御」が行われていないと判断されると(NO)、ステップS12へ移行し、「スタック脱出制御」が行われていると判断されると(YES)、ステップS13へ移行する。
ステップS12では、「通常制御」が行われ、「オート・モード」の制御に戻る。
ステップS13では、「車速(従動輪車輪速)≦一定値」の判断処理が行われる。この判断は、図5のステップS4と同様に行われ、「車速(従動輪車輪速)≦一定値」であれば(YES)、ステップS14へ移行し、「車速(従動輪車輪速)≦一定値」で無ければ(NO)、ステップS12へ移行する。ステップS14では、「スタック脱出制御」が継続される。
[実施例1の効果]
本発明実施例1では、車両のスタック状態を検出したときトルク伝達カップリング1のスタック脱出制御を行わせるため、スタック脱出制御を自動で行わせることができ、スタック状態から的確に脱出を行わせることができる。
本発明実施例1では、車両のスタック状態を検出したときトルク伝達カップリング1のスタック脱出制御を行わせるため、スタック脱出制御を自動で行わせることができ、スタック状態から的確に脱出を行わせることができる。
前記コントローラ9は、前輪55,57が回転し且つ後輪21,23が非回転又は非回転と見なし得るとき車両がスタック状態であると検出するため、スタック脱出制御を確実に行わせることができる。
前記コントローラ9は、前輪55,57及び後輪21,23の車輪速とアクセル開度と経過時間とに基づき前輪55,57の車輪速及びアクセル開度が一定値以上で後輪21,23の車輪速が一定値以下である状態が一定時間継続したとき車両がスタック状態であると検出するため、スタック脱出制御をより確実に行わせることができる。
前記コントローラ9は、前後輪55,57,21,23の差回転が一定値以上又は前後輪55,57,21,23の差回転が車速の一定割合以上であるとき後輪21,23輪の車輪速が一定値以下であると判断するため、スタック脱出制御をより確実に行わせることができる。
前記コントローラ9は、前記トルク伝達カップリング1が締結制御されているとき前後輪55,57,21,23間の回転差が収束しない場合に車両がスタック状態であると検出するため、スタック脱出制御を確実に行わせることができる。
前記コントローラ9は、車速が一定値以上又は後輪21,23の車輪速が一定値以上であるとき車両が非スタック状態であると検出するため、非スタック状態を確実に判断し、「オート・モード」の制御に戻すことができる。
前記コントローラ9は、車速が一定値以上又は後輪21,23の車輪速が一定値以上であるとき車両が非スタック状態であると検出するため、非スタック状態を確実に判断し、「オート・モード」の制御に戻すことができる。
前記トルク伝達カップリング1は、前後輪55,57,21,23の4輪駆動を行うためにボタン操作などにより選択的に通常の「オート・モード」の締結制御が可能であり、コントローラ9は、前記通常の「オート・モード」よりも高い締結力でトルク伝達カップリング1のスタック脱出制御を行わせるため、スタックからの脱出を確実に行わせることができる。
図7,図8は、本発明実施例2に係り、図7は、スタック脱出制御の移行フローチャート、図8は、同解除フローチャートである。図7,図8において、図5,図6のフローチャートと同一のステップには、同符号を付して説明する。
図7のフローチャートでは、図5のフローチャートのステップS1を無くし、ステップS4に代えてステップS15とし、トルク伝達カップリング1にトルク出力指示があるにも係わらず前後輪55,57,21,23の回転差が収束しない場合にスタック脱出制御を行わせる。
ステップS15では、「出力指示値≧一定値」の判断処理が行われる。この判断は、スタック判断部91が「オート・モード」におけるトルク伝達カップリング1の締結制御値を出力指示値として行う。「出力指示値≧一定値」であれば(YES)、ステップS5へ移行し、「出力指示値≧一定値」で無ければ(NO)、ステップS2へ移行する。
すなわち、前記コントローラ9は、前輪55,57及び後輪21,23の車輪速と前記トルク伝達カップリング1の締結制御とアクセル開度と経過時間とに基づき前後輪55,57,21,23の差回転が一定値以上又は前後輪55,57,21,23の差回転が車速の一定割合以上である状態とトルク伝達カップリング1の締結制御値及びアクセル開度が一定値以上である状態とが一定時間継続したとき車両がスタック状態であると検出するため、スタック脱出制御をより確実に行わせることができる。
図8のフローチャートでは、図6のフローチャートのステップS13に代えて、ステップS16,S17とした。
ステップS16では、「アクセル開度≦一定値」の判断処理が行われる。この判断は、スタック判断部91が、アクセル開度63の入力に基づき行い、「アクセル開度≦一定値」でなければ(NO)、ステップS17へ移行し、「アクセル開度≦一定値」であれば(YES)、ステップS14へ移行する。「アクセル開度≦一定値」と判断されても、スタック状態であるためステップS14へ移行し、「スタック脱出制御」が継続される。
ステップS17では、「前後差回転≧一定値又は車速の一定割合」の判断処理が行われる。この判断は、図5,図7のステップS3と同様に行われ、「前後差回転≧一定値又は車速の一定割合」であれば(YES)、ステップS14へ移行し、「前後差回転≧一定値又は車速の一定割合」で無ければ(NO)、ステップS12へ移行する。
すなわち、コントローラ9は、アクセル開度が一定値以上であるとき前輪55,57及び後輪21,23の車輪速に基づき前後輪55,57,21,23の差回転が一定値以下又は前後輪55,57,21,23の差回転が車速の一定割合以下であるとき後輪21,23の車輪速が一定値以上であると車両が非スタック状態であると判断して「オート・モード」の制御に戻すことができる。
図9は、本発明の実施例3に係り、フロント・エンジン、リヤ・ドライブの2輪駆動車のスケルトン平面図である。なお、実施例1と対応する構成部分には同符号を付して説明する。
図9では、前輪55A,57Aが従動輪であり、トランス・ミッション47Aの出力軸61Aがユニバーサル・ジョイント29に接続されている。左右駆動輪である後輪21A,23A間の差動を調節可能な差動調節手段として、差動トルク制限クラッチ1Aがリヤ・デファレンシャル装置3に設けられている。差動トルク制限クラッチ1Aは、油圧クラッチにより構成され、コントロール・バルブ95を介して油圧ポンプ97に接続されている。コントロール・バルブ95は、コントローラ9Aにより制御され、「差動制限モード」により、各種センサの検出に基づき各走行条件下で最適な走行性能を得るためにリヤ・デファレンシャル装置3の差動制限トルクの制御が行われる。「ロック・モード」が選択されると「オート・モード」よりも差動制限トルクをアップした制御が行われる。
さらに、「差動制限モード」において、車両のスタック状態が検出されると差動トルク制限クラッチ1Aの「スタック脱出制御」が行われる。「ロック・モード」においても、差動トルク制限クラッチ1Aの最大出力値まで油圧を掛ける余裕があれば、「スタック脱出制御」へ移行させることができる。
前記コントローラ9Aには、各種センサの検出値として前後輪55A,57A,21A,23Aの各車輪回転数59、アクセル開度63、ステアリング角(ハンドル角)65が入力されるようになっている。これらの入力に基づき、差動トルク制限クラッチ1Aの操作力又は操作量a、スロットル開度又は燃料供給量(電気自動車の場合はモータへの電流供給量)b、ブレーキ操作力cの出力が行われる。この出力により「差動制限モード」「スタック脱出制御」が行われる。
本実施例では、車両のスタック状態を検出したとき差動トルク制限クラッチ1Aのスタック脱出制御を行わせるから、スタック脱出制御を自動で行わせることができ、スタック状態から的確に脱出を行わせることができる。
前記コントローラ9Aは、左右後輪21A,23Aの一方が回転し且つ他方が非回転又は非回転と見なし得るとき車両がスタック状態であると検出してスタック脱出制御を自動で行わせることができる。
前記コントローラ9Aは、左右後輪21A,23Aの車輪速とアクセル開度と経過時間とに基づき左右後輪21A,23Aの一方の車輪速及びアクセル開度が一定値以上で左右後輪21A,23Aの他方の車輪速が一定値以下である状態が一定時間継続したとき車両がスタック状態であると検出してスタック脱出制御を自動で行わせることができる。
前記コントローラ9Aは、左右後輪21A,23Aの差回転が一定値以上又は左右後輪21A,23Aの差回転が車速の一定割合以上であるとき左右後輪21A,23Aの他方の車輪速が一定値以下であると判断してスタック脱出制御を自動で行わせることができる。
前記コントローラ9Aは、前記差動トルク制限クラッチ1Aが制御されているとき左右後輪21A,23A間の回転差が収束しない場合に車両がスタック状態であると検出してスタック脱出制御を自動で行わせることができる。
前記コントローラ9Aは、左右後輪21A,23Aの車輪速と前記差動トルク制限クラッチ1Aの制御とアクセル開度と経過時間とに基づき左右後輪21A,23Aの差回転が一定値以上又は左右後輪21A,23Aの差回転が車速の一定割合以上、差動トルク制限クラッチ1Aの制御値及びアクセル開度が一定値以上である状態が一定時間継続したとき車両がスタック状態であると検出してスタック脱出制御を自動で行わせることができる。
前記コントローラ9Aは、車速が一定値以上又は左右後輪21A,23Aの車輪速が一定値以上であるとき車両が非スタック状態であると検出して「差動制限モード」に戻ることができる。
前記コントローラ9Aは、アクセル開度が一定値以上であるとき左右後輪21A,23Aの車輪速に基づき左右後輪21A,23Aの差回転が一定値以下又は左右後輪21A,23Aの差回転が車速の一定割合以下であるとき左右後輪21A,23Aの車輪速が一定値以上であると判断して「差動制限モード」に戻ることができる。
前記差動トルク制限クラッチ1Aは、左右後輪21A,23Aの差動制御を行うために差動制限モードの制御が可能であり、前記コントローラ9Aは、前記差動制限モードよりも高い操作力又は増加した操作量である油圧で前記差動トルク制限クラッチ1Aのスタック脱出制御を行わせることができる。
[その他]
伝達トルク調節手段を操作するアクチュエータは、電磁石に限らず、電動モータ、油圧ピストン、電磁ソレノイドなどの他のアクチュエータを適用することもできる。
[その他]
伝達トルク調節手段を操作するアクチュエータは、電磁石に限らず、電動モータ、油圧ピストン、電磁ソレノイドなどの他のアクチュエータを適用することもできる。
車両の駆動輪と従動輪とは、4WD車両の前輪と後輪、又は一般的にFF,FRやMRなどの駆動方式で区別される左右前輪、左右後輪を示すものであり、本願発明のスタック脱出制御装置は、これらの車輪間の伝達トルク調節手段に対して制御を行うことができる。
1 トルク伝達カップリング(伝達トルク調節手段)
1A 差動トルク制限クラッチ(差動調節手段)
9,9A コントローラ(走行状態検出手段、制御手段)
21,23 後輪(従動輪)
55,57 前輪(駆動輪)
21A,23A 後輪(駆動輪)
55A,57A 前輪(従動輪)
1A 差動トルク制限クラッチ(差動調節手段)
9,9A コントローラ(走行状態検出手段、制御手段)
21,23 後輪(従動輪)
55,57 前輪(駆動輪)
21A,23A 後輪(駆動輪)
55A,57A 前輪(従動輪)
Claims (19)
- 車両の従動輪へのトルク伝達を調節可能な伝達トルク調節手段と、
車両の走行状態を検出する走行状態検出手段と、
前記走行状態検出手段が車両のスタック状態を検出したとき前記伝達トルク調節手段のスタック脱出制御を行わせる制御手段と
を備えたことを特徴とするスタック脱出制御装置。 - 請求項1記載のスタック脱出制御装置であって、
前記走行状態検出手段は、駆動輪が回転し且つ従動輪が非回転又は非回転と見なし得るとき車両がスタック状態であると検出する
ことを特徴とするスタック脱出制御装置。 - 請求項1又は2記載のスタック脱出制御装置であって、
前記走行状態検出手段は、駆動輪及び従動輪の車輪速とアクセル開度と経過時間とに基づき駆動輪の車輪速及びアクセル開度が一定値以上で従動輪の車輪速が一定値以下である状態が一定時間継続したとき車両がスタック状態であると検出する
ことを特徴とするスタック脱出制御装置。 - 請求項3記載のスタック脱出制御装置であって、
前記走行状態検出手段は、前後輪の差回転が一定値以上又は前後輪の差回転が車速の一定割合以上であるとき従動輪の車輪速が一定値以下であると判断する
ことを特徴とするスタック脱出制御装置。 - 請求項1記載のスタック脱出制御装置であって、
前記走行状態検出手段は、前記伝達トルク調節手段が調節制御されているとき前後輪間の回転差が収束しない場合に車両がスタック状態であると検出する
ことを特徴とするスタック脱出制御装置。 - 請求項5記載のスタック脱出制御装置であって、
前記走行状態検出手段は、駆動輪及び従動輪の車輪速と前記伝達トルク調節手段の制御とアクセル開度と経過時間とに基づき前後輪の差回転が一定値以上又は前後輪の差回転が車速の一定割合以上の状態と伝達トルク調節手段の制御値及びアクセル開度が一定値以上である状態とが一定時間継続したとき車両がスタック状態であると検出する
ことを特徴とするスタック脱出制御装置。 - 請求項1〜6記載のスタック脱出制御装置であって、
前記走行状態検出手段は、車速が一定値以上又は従動輪の車輪速が一定値以上であるとき車両が非スタック状態であると検出する
ことを特徴とするスタック脱出制御装置。 - 請求項7記載のスタック脱出制御装置であって、
前記走行状態検出手段は、アクセル開度が一定値以上であるとき駆動輪及び従動輪の車輪速に基づき前後輪の差回転が一定値以下又は前後輪の差回転が車速の一定割合以下であるとき従動輪の車輪速が一定値以上であると判断する
ことを特徴とするスタック脱出制御装置。 - 請求項1〜8記載のスタック脱出制御装置であって、
前記伝達トルク調節手段は、前後輪の4輪駆動を行うために選択的にオート・モードの制御が可能であり、
前記制御手段は、前記オート・モードよりも高い操作力又は増加した操作量で前記伝達トルク調節手段のスタック脱出制御を行わせる
ことを特徴とするスタック脱出制御装置。 - 車両の左右駆動輪間の差動を調節可能な差動調節手段と、
車両の走行状態を検出する走行状態検出手段と、
前記走行状態検出手段が車両のスタック状態を検出したとき前記差動調節手段のスタック脱出制御を行わせる制御手段と
を備えたことを特徴とするスタック脱出制御装置。 - 請求項10記載のスタック脱出制御装置であって、
前記走行状態検出手段は、左右駆動輪の一方が回転し且つ他方が非回転又は非回転と見なし得るとき車両がスタック状態であると検出する
ことを特徴とするスタック脱出制御装置。 - 請求項10又は11記載のスタック脱出制御装置であって、
前記走行状態検出手段は、左右駆動輪の車輪速とアクセル開度と経過時間とに基づき左右駆動輪の一方の車輪速及びアクセル開度が一定値以上で左右駆動輪の他方の車輪速が一定値以下である状態が一定時間継続したとき車両がスタック状態であると検出する
ことを特徴とするスタック脱出制御装置。 - 請求項12記載のスタック脱出制御装置であって、
前記走行状態検出手段は、左右駆動輪の差回転が一定値以上又は左右駆動輪の差回転が車速の一定割合以上であるとき左右駆動輪の他方の車輪速が一定値以下であると判断する
ことを特徴とするスタック脱出制御装置。 - 請求項10記載のスタック脱出制御装置であって、
前記走行状態検出手段は、前記差動調節手段が制御されているとき左右駆動輪間の回転差が収束しない場合に車両がスタック状態であると検出する
ことを特徴とするスタック脱出制御装置。 - 請求項14記載のスタック脱出制御装置であって、
前記走行状態検出手段は、左右駆動輪の車輪速と前記差動調節手段の制御とアクセル開度と経過時間とに基づき左右輪の差回転が一定値以上又は左右輪の差回転が車速の一定割合以上、差動制御手段の制御値及びアクセル開度が一定値以上である状態が一定時間継続したとき車両がスタック状態であると検出する
ことを特徴とするスタック脱出制御装置。 - 請求項10〜15記載のスタック脱出制御装置であって、
前記走行状態検出手段は、車速が一定値以上又は左右駆動輪の車輪速が一定値以上であるとき車両が非スタック状態であると検出する
ことを特徴とするスタック脱出制御装置。 - 請求項16記載のスタック脱出制御装置であって、
前記走行状態検出手段は、アクセル開度が一定値以上であるとき左右駆動輪の車輪速に基づき左右駆動輪の差回転が一定値以下又は左右駆動輪の差回転が車速の一定割合以下であるとき左右駆動輪の車輪速が一定値以上であると判断する
ことを特徴とするスタック脱出制御装置。 - 請求項10〜17記載のスタック脱出制御装置であって、
前記差動調節手段は、左右駆動輪の差動制御を行うために差動制限モードの制御が可能であり、
前記制御手段は、前記差動制限モードよりも高い操作力又は増加した操作量で前記差動調節手段のスタック脱出制御を行わせる
ことを特徴とするスタック脱出制御装置。 - 請求項1〜8の何れかに記載のスタック脱出制御装置であって、
前記伝達トルク調節手段は、前記駆動輪及び従動輪間のロックを行うために選択的にロック・モードの制御が可能であり、
前記制御手段は、前記ロック・モードの最大制御出力値まで余裕がある場合に前記伝達トルク調節手段のスタック脱出制御を行わせる
ことを特徴とするスタック脱出制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006020056A JP2007196929A (ja) | 2006-01-30 | 2006-01-30 | スタック脱出制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006020056A JP2007196929A (ja) | 2006-01-30 | 2006-01-30 | スタック脱出制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007196929A true JP2007196929A (ja) | 2007-08-09 |
Family
ID=38451943
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006020056A Pending JP2007196929A (ja) | 2006-01-30 | 2006-01-30 | スタック脱出制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007196929A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012102214A1 (ja) * | 2011-01-27 | 2012-08-02 | 本田技研工業株式会社 | 四輪駆動車両の駆動力制御装置 |
| JP2018034700A (ja) * | 2016-08-31 | 2018-03-08 | 本田技研工業株式会社 | 四輪駆動車両のトルク制御装置 |
| JP2021075075A (ja) * | 2019-11-05 | 2021-05-20 | トヨタ自動車株式会社 | 車両の駆動力制御装置 |
-
2006
- 2006-01-30 JP JP2006020056A patent/JP2007196929A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012102214A1 (ja) * | 2011-01-27 | 2012-08-02 | 本田技研工業株式会社 | 四輪駆動車両の駆動力制御装置 |
| GB2501038A (en) * | 2011-01-27 | 2013-10-09 | Honda Motor Co Ltd | Driving force control device for four-wheel-drive vehicle |
| JP5406385B2 (ja) * | 2011-01-27 | 2014-02-05 | 本田技研工業株式会社 | 四輪駆動車両の駆動力制御装置 |
| US8996267B2 (en) | 2011-01-27 | 2015-03-31 | Honda Motor Co., Ltd. | Driving force control device for four-wheel-drive vehicle |
| GB2501038B (en) * | 2011-01-27 | 2017-10-25 | Honda Motor Co Ltd | Driving force control device for four-wheel-drive vehicle |
| JP2018034700A (ja) * | 2016-08-31 | 2018-03-08 | 本田技研工業株式会社 | 四輪駆動車両のトルク制御装置 |
| JP2021075075A (ja) * | 2019-11-05 | 2021-05-20 | トヨタ自動車株式会社 | 車両の駆動力制御装置 |
| JP7200910B2 (ja) | 2019-11-05 | 2023-01-10 | トヨタ自動車株式会社 | 車両の駆動力制御装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5523869B2 (ja) | 車両の駆動状態制御装置 | |
| JP3609491B2 (ja) | 前後輪駆動車両 | |
| JP2008018832A (ja) | 車両運動制御装置 | |
| JPH08300965A (ja) | 前後輪駆動車両 | |
| JPS6064033A (ja) | 4輪駆動車の自動切換制御方法 | |
| JP2007269072A (ja) | 作業車両 | |
| JP2007196929A (ja) | スタック脱出制御装置 | |
| US20130110366A1 (en) | Left-right wheel drive force distribution control apparatus for a vehicle | |
| JP7164044B2 (ja) | 前後輪駆動車両の駆動力配分方法および駆動力配分装置 | |
| JP2006232094A (ja) | 車両の制動制御装置 | |
| US11059533B2 (en) | Vehicle with brake traction control and method for controlling traction of a vehicle | |
| JP2882474B2 (ja) | 車両用左右輪間動力伝達制御装置 | |
| JPS59216732A (ja) | 4輪駆動車 | |
| JP2021025551A (ja) | 制御装置及び、制御方法 | |
| JP2008230465A (ja) | 駆動力配分装置 | |
| CN112351904B (zh) | 用于控制用于机动车辆车轴的驱动系统的方法 | |
| JP4754984B2 (ja) | トルク配分制御装置 | |
| JP4462046B2 (ja) | 車両の制動制御装置 | |
| JP2007154934A (ja) | デフロック制御装置 | |
| JP4087490B2 (ja) | 路面状態の検出装置 | |
| JP2008089092A (ja) | トルク伝達制御装置 | |
| JP5176601B2 (ja) | トランスミッション制御装置 | |
| JP6710450B2 (ja) | 自動車のデフロック装置 | |
| JP2005306273A (ja) | 車両駆動システム | |
| JP3603390B2 (ja) | 四輪駆動車 |