JP2007147593A - 磁気センサーアセンブリ - Google Patents
磁気センサーアセンブリ Download PDFInfo
- Publication number
- JP2007147593A JP2007147593A JP2006274212A JP2006274212A JP2007147593A JP 2007147593 A JP2007147593 A JP 2007147593A JP 2006274212 A JP2006274212 A JP 2006274212A JP 2006274212 A JP2006274212 A JP 2006274212A JP 2007147593 A JP2007147593 A JP 2007147593A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- sensor
- assembly
- field sensor
- magnetoresistive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000758 substrate Substances 0.000 claims abstract description 93
- 238000004519 manufacturing process Methods 0.000 claims abstract description 10
- 238000000034 method Methods 0.000 claims description 57
- 238000001514 detection method Methods 0.000 claims description 28
- 239000000463 material Substances 0.000 claims description 27
- 239000004020 conductor Substances 0.000 claims description 11
- 238000005452 bending Methods 0.000 claims description 3
- 239000000523 sample Substances 0.000 description 20
- 230000000712 assembly Effects 0.000 description 4
- 238000000429 assembly Methods 0.000 description 4
- 230000000747 cardiac effect Effects 0.000 description 4
- 239000007943 implant Substances 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000005355 Hall effect Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000000399 orthopedic effect Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 210000001035 gastrointestinal tract Anatomy 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000004382 potting Methods 0.000 description 1
- 210000002345 respiratory system Anatomy 0.000 description 1
- 238000000742 single-metal deposition Methods 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 210000001635 urinary tract Anatomy 0.000 description 1
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/062—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/0206—Three-component magnetometers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3954—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/04—Arrangements of multiple sensors of the same type
- A61B2562/043—Arrangements of multiple sensors of the same type in a linear array
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Human Computer Interaction (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Optics & Photonics (AREA)
- Radiology & Medical Imaging (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Measuring Magnetic Variables (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
- Endoscopes (AREA)
- Hall/Mr Elements (AREA)
Abstract
【解決手段】センサーアセンブリ20は、第1の表面取付け可能なパッケージ内の第1の磁気抵抗磁界センサー28Aを含み、異なる第1および第2の軸それぞれに投射された磁界の第1および第2の成分を測定する。第2の表面取付け可能なパッケージ内の第2の磁気抵抗磁界センサー28Bは、第3の軸上に投射された磁界の少なくとも第3の成分を測定する。基板アセンブリ24は、第1の磁界センサーを第1の空間的配置に方向を定めて配置し、第2の磁界センサーを第2の配置に方向を定めて配置して、第3の軸が第1および第2の軸を含む平面の外に方向を定めて配置されるようにする。
【選択図】図3
Description
本発明は、大まかに言って、医療用位置追跡システムに関し、より詳しくは、磁気的位置検出システムでの磁界を検出する方法および装置に関する。
医療手技に伴う物体の座標を追跡するためのさまざまな方法およびシステムが当技術分野で知られている。これらのシステムのいくつかは、磁界の測定を用いている。例えば、米国特許第5,391,199号および同第5,443,489号は、その開示内容が参照することによって本明細書に組み込まれるが、体内プローブの座標がひとつまたは複数の磁界トランスデューサー(field transducers)を用いて求められるシステムを記載している。そのようなシステムは、カテーテルのような医療用プローブに関する位置情報を生み出すために用いられる。位置センサーがプローブ内に配置されていて、外部から加えられた磁界に応答して、信号を生み出す。磁界は、既知の外部基準フレームに固定された、相互に離れた位置の放射器コイルのような磁界発生器によって生み出される。
多くの医療用の位置追跡の適用においては、プローブ内に嵌め込まれた位置センサーが外部から加えられた磁界の3つの直交する成分の全てを測定することが望ましい。しかし、多くの従来の磁界センサーは、一つまたは2つの成分を測定できるだけである。より詳しく言うと、表面実装技術(SMT)を用いて3軸磁界センサーを製造することは困難である。一方、1軸または2軸SMT磁界センサーは、それらが低コストであり、小型で薄く、通常の大量生産プロセスに適しているので、センサーアセンブリで用いるための魅力的な候補であることが多い。
第1の表面取付け可能なパッケージ内の第1の磁気抵抗磁界センサーであって、前記第1の磁気抵抗磁界センサーの空間的配置に関する異なる第1および第2の軸それぞれに投射された磁界の第1および第2の成分を測定し、測定された前記第1および第2の成分を示す第1の位置信号を生み出すように準備された、第1の磁気抵抗磁界センサーと、
第2の表面取付け可能なパッケージ内の第2の磁気抵抗磁界センサーであって、前記第2の磁気抵抗磁界センサーの空間的配置に関する少なくとも第3の軸に投射された磁界の少なくとも第3の成分を測定し、測定された前記第3の成分を示す第2の位置信号を生み出すように準備された、第2の磁気抵抗磁界センサーと、
その表面に前記第1および第2の磁気抵抗磁界センサーが表面取付けされた基板アセンブリであって、前記第3の軸が前記第1および第2の軸を含む平面の外に方向を定めて配置されるように、前記第1の磁気抵抗磁界センサーを第1の空間的配置で方向を定めて配置し、前記第2の磁気抵抗磁界センサーを第2の空間的配置で方向を定めて配置するよう結合された、基板アセンブリと、
を具備する。
磁界を生み出すように準備された一つ以上の磁界発生器と、
センサーアセンブリであって、
第1の表面取付け可能なパッケージ内の第1の磁気抵抗磁界センサーであって、前記第1の磁気抵抗磁界センサーの空間的配置に関する異なる第1および第2の軸それぞれに投射された磁界の第1および第2の成分を測定し、測定された前記第1および第2の成分を示す第1の位置信号を生み出すように準備された、第1の磁気抵抗磁界センサー、
第2の表面取付け可能なパッケージ内の第2の磁気抵抗磁界センサーであって、前記第2の磁気抵抗磁界センサーの空間的配置に関する少なくとも第3の軸に投射された磁界の少なくとも第3の成分を測定し、測定された前記第3の成分を示す第2の位置信号を生み出すように準備された、第2の磁気抵抗磁界センサー、
その表面に前記第1および第2の磁気抵抗磁界センサーが表面取付けされた基板アセンブリであって、前記第3の軸が前記第1および第2の軸を含む平面の外に方向を定めて配置されるように、前記第1の磁気抵抗磁界センサーを第1の空間的配置で方向を定めて配置し、前記第2の磁気抵抗磁界センサーを第2の空間的配置で方向を定めて配置するように結合された、基板アセンブリ、
を含む、センサーアセンブリと、
前記第1および第2の位置信号を受信し、前記第1および第2の位置信号に応答して前記一つ以上の磁界発生器に対する前記センサーアセンブリの空間的な位置を計算するように準備された、制御モジュールと、
を具備する。
第1の表面取付け可能なパッケージ内の第1の磁気抵抗磁界センサーを提供する過程であって、前記第1の磁気抵抗磁界センサーは、前記第1の磁気抵抗磁界センサーの空間的配置に関する異なる第1および第2の軸それぞれに投射された磁界の第1および第2の成分を測定し、測定された前記第1および第2の成分を示す第1の位置信号を生み出すように準備された、第1の磁気抵抗磁界センサーを提供する過程と、
第2の表面取付け可能なパッケージ内の第2の磁気抵抗磁界センサーを提供する過程であって、前記第2の磁気抵抗磁界センサーは、前記第2の磁気抵抗磁界センサーの空間的配置に関する少なくとも第3の軸に投射された磁界の少なくとも第3の成分を測定し、測定された前記第3の成分を示す第2の位置信号を生み出すように準備された、第2の磁気抵抗磁界センサーを提供する過程と、
前記第1の磁気抵抗磁界センサーを第1の空間的配置で方向を定めて配置し、前記第2の磁気抵抗磁界センサーを第2の空間的配置で方向を定めて配置して、前記第3の軸が前記第1および第2の軸を含む平面の外に方向を定めて配置されるように、前記第1および第2の磁気抵抗磁界センサーを基板アセンブリの表面に表面取付けする過程と、
を具備する。
システムの説明
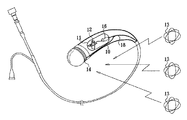
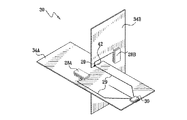
図1は、本発明の実施の形態に基づく、医療用磁気的位置追跡システムで用いられるプローブ10の模式的な絵の説明図である。図1の例示的な実施の形態では、プローブ10は、心臓の電気的マッピング、イメージング、治療、および/または、その他の侵襲的手技を実行するために患者の心臓内に挿入される心臓カテーテルを含んでいる。そのカテーテルは、磁気的位置追跡システムの一部であり、磁気的位置追跡システムは、大まかに言って、既知の空間的座標に配置された一つ以上の磁界発生器13を含んでいる。磁界発生器は、プローブを含む予め決められた作業体積内で磁界を生み出す。
多くの用途では、位置センサー11が、位置を計算できるようにするために、外部から加えられた磁界の3つの直交する成分の全てを測定することが望ましい。この目的のために、いくつかの実施の形態では、センサーアセンブリ12は、2つ以上の薄型の電子的な磁界センサーを含んでいる。そのような磁界センサーは、当技術分野で知られているような、磁気抵抗素子に基づくものであってよい。磁気抵抗素子を用いることは、磁気抵抗素子がDC磁界を測定でき、DC磁界が、AC磁界に比べて、金属製の物体からの外乱によって引き起こされた測定誤差の影響をより受けにくいので、多くの場合で望ましい。センサーアセンブリ12で用いられるいくつかの例示的な磁界センサーは、ハネウェルのHMC1002、HMC1022、HMC1052の2軸センサーである。これらの装置に関するさらなる詳細は、ハネウェルの上記のウェブサイト上で見出すことができる。
この発明の具体的な実施態様は以下の通りである。
(1)センサーアセンブリにおいて、
第1の表面取付け可能なパッケージ内の第1の磁気抵抗磁界センサーであって、前記第1の磁界センサー(field sensor)の空間的配置に関する異なる第1および第2の軸それぞれの上に投射された磁界(magnetic field)の第1および第2の成分を測定し、かつ測定された前記第1および第2の成分を示す第1の位置信号を生み出すように準備された、第1の磁気抵抗磁界センサーと、
第2の表面取付け可能なパッケージ内の第2の磁気抵抗磁界センサーであって、前記第2の磁界センサーの空間的配置に関する少なくとも第3の軸上に投射された前記磁界の少なくとも第3の成分を測定し、かつ測定された前記第3の成分を示す第2の位置信号を生み出すように準備された、第2の磁気抵抗磁界センサーと、
前記第1および第2の磁界センサーが表面取付けされた基板アセンブリであって、前記第3の軸が前記第1および第2の軸を含む平面の外に方向が定まるように、前記第1の磁界センサーを第1の空間的配置で方向を定め、かつ前記第2の磁界センサーを第2の空間的配置で方向を定めるよう結合された、基板アセンブリと、
を具備する、センサーアセンブリ。
(2)前記実施態様(1)に記載のセンサーアセンブリにおいて、
前記基板アセンブリが、前記第1および第2の磁界センサーの方向を定めるように曲げられた柔軟な基板材料を含む、
センサーアセンブリ。
(3)前記実施態様(2)に記載のセンサーアセンブリにおいて、
前記柔軟な基板材料が、前記基板アセンブリを曲げることができるように一つ以上のスロットを含む、
センサーアセンブリ。
(4)前記実施態様(1)に記載のセンサーアセンブリにおいて、
前記基板アセンブリが、前記第1および第2の磁界センサーの方向を定めるように互いに連結される2つ以上の部分を含む、
センサーアセンブリ。
(5)前記実施態様(4)に記載のセンサーアセンブリにおいて、
前記2つ以上の部分が、前記2つ以上の部分を互いに連結できるように少なくとも一つのスロットを含む、
センサーアセンブリ。
(6)前記実施態様(1)に記載のセンサーアセンブリにおいて、
前記基板アセンブリが、プリント基板(PCB)材料を含む、
センサーアセンブリ。
(7)前記実施態様(6)に記載のセンサーアセンブリにおいて、
前記第1および第2の磁界センサーの少なくとも一方に対する電気的相互接続を提供するために前記PCB材料上に配置された導電体、
をさらに具備する、センサーアセンブリ。
(8)前記実施態様(1)に記載のセンサーアセンブリにおいて、
前記センサーアセンブリが、2mm×2mm×4mmより小さい寸法を有する、
センサーアセンブリ。
(9)位置検出装置において、
磁界を生み出すように準備された一つ以上の磁界発生器と、
センサーアセンブリであって、
第1の表面取付け可能なパッケージ内の第1の磁気抵抗磁界センサーであって、前記第1の磁界センサーの空間的配置に関する異なる第1および第2の軸それぞれの上に投射された磁界の第1および第2の成分を測定し、かつ測定された前記第1および第2の成分を示す第1の位置信号を生み出すように準備された、第1の磁気抵抗磁界センサー、
第2の表面取付け可能なパッケージ内の第2の磁気抵抗磁界センサーであって、前記第2の磁界センサーの空間的配置に関する少なくとも第3の軸上に投射された前記磁界の少なくとも第3の成分を測定し、かつ測定された前記第3の成分を示す第2の位置信号を生み出すように準備された、第2の磁気抵抗磁界センサー、ならびに、
前記第1および第2の磁界センサーが表面取り付けされた基板アセンブリであって、前記第3の軸が前記第1および第2の軸を含む平面の外に方向が定まるように、前記第1の磁界センサーを第1の空間的配置で方向を定め、かつ前記第2の磁界センサーを第2の空間的配置で方向を定めるよう結合された、基板アセンブリ、
を含む、センサーアセンブリと、
前記第1および第2の位置信号を受信し、かつ前記位置信号に応答して前記一つ以上の磁界発生器に対する前記センサーアセンブリの空間的な位置を計算するように準備された、制御モジュールと、
を具備する、位置検出装置。
(10)前記実施態様(9)に記載の位置検出装置において、
前記磁界が、直流(DC)磁界を含む、
位置検出装置。
前記位置センサーが、患者の体内に挿入される物体に結合されるように構成されていて、
前記制御モジュールが、前記体内の前記物体の位置座標を求めるように準備されている、
位置検出装置。
(12)前記実施態様(9)に記載の位置検出装置において、
前記基板アセンブリが、前記第1および第2の磁界センサーの方向を定めるように曲げられた柔軟な基板材料を含む、
位置検出装置。
(13)前記実施態様(9)に記載の位置検出装置において、
前記基板アセンブリが、前記第1および第2の磁界センサーの方向を定めるように互いに連結される2つ以上の部分を含む、
位置検出装置。
(14)前記実施態様(9)に記載の位置検出装置において、
前記基板アセンブリが、プリント基板(PCB)材料を含む、
位置検出装置。
(15)センサーアセンブリの製造方法において、
第1の表面取付け可能なパッケージ内の第1の磁気抵抗磁界センサーを提供する過程であって、前記第1の磁界センサーが、前記第1の磁界センサーの空間的配置に関する異なる第1および第2の軸それぞれの上に投射された磁界の第1および第2の成分を測定し、かつ測定された前記第1および第2の成分を示す第1の位置信号を生み出すように準備された、第1の磁気抵抗磁界センサーを提供する過程と、
第2の表面取付け可能なパッケージ内の第2の磁気抵抗磁界センサーを提供する過程であって、前記第2の磁界センサーが、前記第2の磁界センサーの空間的配置に関する少なくとも第3の軸上に投射された前記磁界の少なくとも第3の成分を測定し、かつ測定された前記第3の成分を示す第2の位置信号を生み出すように準備された、第2の磁気抵抗磁界センサーを提供する過程と、
前記第1の磁界センサーを第1の空間的配置で方向を定め、かつ前記第2の磁界センサーを第2の空間的配置で方向を定め、前記第3の軸が前記第1および第2の軸を含む平面の外に方向が定められるように、前記第1および第2の磁界センサーを基板アセンブリに表面取り付けする過程と、
を具備する、方法。
(16)前記実施態様(15)に記載の方法において、
前記基板アセンブリが、柔軟な基板材料を含み、
前記方法が、前記第1および第2の磁界センサーの方向を定めるように前記基板アセンブリを曲げる過程、
をさらに具備する、方法。
(17)前記実施態様(16)に記載の方法において、
前記柔軟な基板材料が、前記基板アセンブリを曲げることができるように一つ以上のスロットを含む、
方法。
(18)前記実施態様(15)に記載の方法において、
前記基板アセンブリが、2つ以上の部分を含み、
前記方法が、
前記第1および第2の磁気センサーの方向を定めるように前記2つ以上の部分を互いに連結する過程、
をさらに具備する、
方法。
(19)前記実施態様(18)に記載の方法において、
前記2つ以上の部分が、前記2つ以上の部分を互いに連結できるように少なくとも一つのスロットを含む、
方法。
(20)前記実施態様(15)に記載の方法において、
前記基板アセンブリが、プリント基板(PCB)材料を含む、
方法。
前記第1および第2の磁気センサーの少なくとも一方に対する電気的相互接続を提供するために前記PCB材料上に導電体を配置する過程、
をさらに具備する、方法。
(22)前記実施態様(15)に記載の方法において、
前記センサーアセンブリが、2mm×2mm×4mmより小さい寸法を有する、
方法。
11 位置センサー
12 センサーアセンブリ
13 磁界発生器
14 電極
16 制御モジュール
18 ケーブル
20 センサーアセンブリ
24 基板アセンブリ
28A,28B 磁界センサー
29 PCB導電体
30 センサーアセンブリ
32 スロット
34A,34B 基板部分
42 スロット
Claims (22)
- センサーアセンブリにおいて、
第1の表面取付け可能なパッケージ内の第1の磁気抵抗磁界センサーであって、前記第1の磁界センサーの空間的配置に関する異なる第1および第2の軸それぞれの上に投射された磁界の第1および第2の成分を測定し、かつ測定された前記第1および第2の成分を示す第1の位置信号を生み出すように準備された、第1の磁気抵抗磁界センサーと、
第2の表面取付け可能なパッケージ内の第2の磁気抵抗磁界センサーであって、前記第2の磁界センサーの空間的配置に関する少なくとも第3の軸上に投射された前記磁界の少なくとも第3の成分を測定し、かつ測定された前記第3の成分を示す第2の位置信号を生み出すように準備された、第2の磁気抵抗磁界センサーと、
前記第1および第2の磁界センサーが表面取付けされた基板アセンブリであって、前記第3の軸が前記第1および第2の軸を含む平面の外に方向が定まるように、前記第1の磁界センサーを第1の空間的配置で方向を定め、かつ前記第2の磁界センサーを第2の空間的配置で方向を定めるよう結合された、基板アセンブリと、
を具備する、センサーアセンブリ。 - 請求項1に記載のセンサーアセンブリにおいて、
前記基板アセンブリが、前記第1および第2の磁界センサーの方向を定めるように曲げられた柔軟な基板材料を含む、
センサーアセンブリ。 - 請求項2に記載のセンサーアセンブリにおいて、
前記柔軟な基板材料が、前記基板アセンブリを曲げることができるように一つ以上のスロットを含む、
センサーアセンブリ。 - 請求項1に記載のセンサーアセンブリにおいて、
前記基板アセンブリが、前記第1および第2の磁界センサーの方向を定めるように互いに連結される2つ以上の部分を含む、
センサーアセンブリ。 - 請求項4に記載のセンサーアセンブリにおいて、
前記2つ以上の部分が、前記2つ以上の部分を互いに連結できるように少なくとも一つのスロットを含む、
センサーアセンブリ。 - 請求項1に記載のセンサーアセンブリにおいて、
前記基板アセンブリが、プリント基板(PCB)材料を含む、
センサーアセンブリ。 - 請求項6に記載のセンサーアセンブリにおいて、
前記第1および第2の磁界センサーの少なくとも一方に対する電気的相互接続を提供するために前記PCB材料上に配置された導電体、
をさらに具備する、センサーアセンブリ。 - 請求項1に記載のセンサーアセンブリにおいて、
前記センサーアセンブリが、2mm×2mm×4mmより小さい寸法を有する、
センサーアセンブリ。 - 位置検出装置において、
磁界を生み出すように準備された一つ以上の磁界発生器と、
センサーアセンブリであって、
第1の表面取付け可能なパッケージ内の第1の磁気抵抗磁界センサーであって、前記第1の磁界センサーの空間的配置に関する異なる第1および第2の軸それぞれの上に投射された磁界の第1および第2の成分を測定し、かつ測定された前記第1および第2の成分を示す第1の位置信号を生み出すように準備された、第1の磁気抵抗磁界センサー、
第2の表面取付け可能なパッケージ内の第2の磁気抵抗磁界センサーであって、前記第2の磁界センサーの空間的配置に関する少なくとも第3の軸上に投射された前記磁界の少なくとも第3の成分を測定し、かつ測定された前記第3の成分を示す第2の位置信号を生み出すように準備された、第2の磁気抵抗磁界センサー、ならびに、
前記第1および第2の磁界センサーが表面取り付けされた基板アセンブリであって、前記第3の軸が前記第1および第2の軸を含む平面の外に方向が定まるように、前記第1の磁界センサーを第1の空間的配置で方向を定め、かつ前記第2の磁界センサーを第2の空間的配置で方向を定めるよう結合された、基板アセンブリ、
を含む、センサーアセンブリと、
前記第1および第2の位置信号を受信し、かつ前記位置信号に応答して前記一つ以上の磁界発生器に対する前記センサーアセンブリの空間的な位置を計算するように準備された、制御モジュールと、
を具備する、位置検出装置。 - 請求項9に記載の位置検出装置において、
前記磁界が、直流(DC)磁界を含む、
位置検出装置。 - 請求項9に記載の位置検出装置において、
前記位置センサーが、患者の体内に挿入される物体に結合されるように構成されていて、
前記制御モジュールが、前記体内の前記物体の位置座標を求めるように準備されている、
位置検出装置。 - 請求項9に記載の位置検出装置において、
前記基板アセンブリが、前記第1および第2の磁界センサーの方向を定めるように曲げられた柔軟な基板材料を含む、
位置検出装置。 - 請求項9に記載の位置検出装置であって、
前記基板アセンブリが、前記第1および第2の磁界センサーの方向を定めるように互いに連結される2つ以上の部分を含む、
位置検出装置。 - 請求項9に記載の位置検出装置であって、
前記基板アセンブリが、プリント基板(PCB)材料を含む、
位置検出装置。 - センサーアセンブリの製造方法において、
第1の表面取付け可能なパッケージ内の第1の磁気抵抗磁界センサーを提供する過程であって、前記第1の磁界センサーが、前記第1の磁界センサーの空間的配置に関する異なる第1および第2の軸それぞれの上に投射された磁界の第1および第2の成分を測定し、かつ測定された前記第1および第2の成分を示す第1の位置信号を生み出すように準備された、第1の磁気抵抗磁界センサーを提供する過程と、
第2の表面取付け可能なパッケージ内の第2の磁気抵抗磁界センサーを提供する過程であって、前記第2の磁界センサーが、前記第2の磁界センサーの空間的配置に関する少なくとも第3の軸上に投射された前記磁界の少なくとも第3の成分を測定し、かつ測定された前記第3の成分を示す第2の位置信号を生み出すように準備された、第2の磁気抵抗磁界センサーを提供する過程と、
前記第1の磁界センサーを第1の空間的配置で方向を定め、かつ前記第2の磁界センサーを第2の空間的配置で方向を定めて、前記第3の軸が前記第1および第2の軸を含む平面の外に方向が定められるように、前記第1および第2の磁界センサーを基板アセンブリに表面取り付けする過程と、
を具備する、方法。 - 請求項15に記載の方法において、
前記基板アセンブリが、柔軟な基板材料を含み、
前記方法が、
前記第1および第2の磁界センサーの方向を定めるように前記基板アセンブリを曲げる過程、
をさらに具備する、
方法。 - 請求項16に記載の方法において、
前記柔軟な基板材料が、前記基板アセンブリを曲げることができるように一つ以上のスロットを含む、
方法。 - 請求項15に記載の方法において、
前記基板アセンブリが、2つ以上の部分を含み、
前記方法が、
前記第1および第2の磁気センサーの方向を定めるように前記2つ以上の部分を互いに連結する過程、
をさらに具備する、
方法。 - 請求項18に記載の方法において、
前記2つ以上の部分が、前記2つ以上の部分を互いに連結できるように少なくとも一つのスロットを含む、
方法。 - 請求項15に記載の方法において、
前記基板アセンブリが、プリント基板(PCB)材料を含む、
方法。 - 請求項20に記載の方法において、
前記第1および第2の磁気センサーの少なくとも一方に対する電気的相互接続を提供するために前記PCB材料上に導電体を配置する過程、
をさらに具備する、方法。 - 請求項15に記載の方法において、
前記センサーアセンブリが、2mm×2mm×4mmより小さい寸法を有する、
方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/244,719 | 2005-10-06 | ||
| US11/244,719 US7301332B2 (en) | 2005-10-06 | 2005-10-06 | Magnetic sensor assembly |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007147593A true JP2007147593A (ja) | 2007-06-14 |
| JP2007147593A5 JP2007147593A5 (ja) | 2009-10-08 |
| JP5312736B2 JP5312736B2 (ja) | 2013-10-09 |
Family
ID=37697970
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006274212A Active JP5312736B2 (ja) | 2005-10-06 | 2006-10-05 | 磁気センサーアセンブリ |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US7301332B2 (ja) |
| EP (1) | EP1772097A3 (ja) |
| JP (1) | JP5312736B2 (ja) |
| KR (1) | KR20070038890A (ja) |
| CN (1) | CN1943509B (ja) |
| AU (1) | AU2006225255B8 (ja) |
| BR (1) | BRPI0604237A (ja) |
| CA (1) | CA2562623C (ja) |
| IL (1) | IL178388A (ja) |
| MX (1) | MXPA06011505A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009052963A (ja) * | 2007-08-24 | 2009-03-12 | Denso Corp | 磁気ベクトル分布測定プローブ |
| JP2011513722A (ja) * | 2008-02-26 | 2011-04-28 | ユニベルシテ・クロード・ベルナール・リヨン・プルミエ | 磁場センサの製造方法および同製造方法によって製造された磁場センサ |
| JP2013506538A (ja) * | 2009-10-06 | 2013-02-28 | スミス アンド ネフュー インコーポレーテッド | 整形外科装置の目標物(landmark)の標的化 |
| JP2016502912A (ja) * | 2013-01-16 | 2016-02-01 | セント・ジュード・メディカル,カーディオロジー・ディヴィジョン,インコーポレイテッド | 可撓性の高密度マッピング・カテーテル・チップおよびオンボード高密度マッピング電極を備える可撓性のアブレーション・カテーテル・チップ |
| JP2017049240A (ja) * | 2015-09-01 | 2017-03-09 | ゼネラル・エレクトリック・カンパニイ | 多軸磁気抵抗センサパッケージ |
| JP2018054461A (ja) * | 2016-09-29 | 2018-04-05 | 大同特殊鋼株式会社 | 3軸磁気センサ、連結モジュール、及びセンサプローブ |
| JP2018113439A (ja) * | 2016-12-23 | 2018-07-19 | バイオセンス・ウエブスター・(イスラエル)・リミテッドBiosense Webster (Israel), Ltd. | 単層プリント回路上の三軸センサ |
| JP2020513882A (ja) * | 2016-12-19 | 2020-05-21 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | 優位軸航行センサ |
| US10835151B2 (en) | 2017-02-06 | 2020-11-17 | Boston Scientific Scimed Inc. | Sensor assemblies for electromagnetic navigation systems |
| US11058321B2 (en) | 2016-12-20 | 2021-07-13 | Boston Scientific Scimed Inc. | Current driven sensor for magnetic navigation |
Families Citing this family (82)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7998062B2 (en) | 2004-03-29 | 2011-08-16 | Superdimension, Ltd. | Endoscope structures and techniques for navigating to a target in branched structure |
| DE602004022432D1 (de) | 2003-09-15 | 2009-09-17 | Super Dimension Ltd | System aus zubehör zur verwendung mit bronchoskopen |
| EP2316328B1 (en) | 2003-09-15 | 2012-05-09 | Super Dimension Ltd. | Wrap-around holding device for use with bronchoscopes |
| US8764725B2 (en) | 2004-02-09 | 2014-07-01 | Covidien Lp | Directional anchoring mechanism, method and applications thereof |
| US7695435B2 (en) * | 2005-05-25 | 2010-04-13 | Randall J Benson | System and method for tagging and detecting surgical implements |
| KR100715200B1 (ko) * | 2005-11-17 | 2007-05-07 | 삼성전자주식회사 | 자기력 감지 센서를 이용한 데이터 입력 장치 및 이를이용한 3차원 좌표 산출 방법 |
| US8016749B2 (en) * | 2006-03-21 | 2011-09-13 | Boston Scientific Scimed, Inc. | Vision catheter having electromechanical navigation |
| EP2086399B1 (en) | 2006-11-10 | 2017-08-09 | Covidien LP | Adaptive navigation technique for navigating a catheter through a body channel or cavity |
| US20080167639A1 (en) * | 2007-01-08 | 2008-07-10 | Superdimension Ltd. | Methods for localized intra-body treatment of tissue |
| EP1944581B1 (en) * | 2007-01-15 | 2011-09-07 | Sony Deutschland GmbH | Distance, orientation and velocity measurement using multi-coil and multi-frequency arrangement |
| WO2009074872A2 (en) | 2007-07-09 | 2009-06-18 | Superdimension, Ltd. | Patent breathing modeling |
| US7834621B2 (en) * | 2007-09-25 | 2010-11-16 | General Electric Company | Electromagnetic tracking employing scalar-magnetometer |
| US8905920B2 (en) | 2007-09-27 | 2014-12-09 | Covidien Lp | Bronchoscope adapter and method |
| US8485038B2 (en) * | 2007-12-18 | 2013-07-16 | General Electric Company | System and method for augmented reality inspection and data visualization |
| WO2009122273A2 (en) | 2008-04-03 | 2009-10-08 | Superdimension, Ltd. | Magnetic interference detection system and method |
| US8218846B2 (en) | 2008-05-15 | 2012-07-10 | Superdimension, Ltd. | Automatic pathway and waypoint generation and navigation method |
| WO2009147671A1 (en) | 2008-06-03 | 2009-12-10 | Superdimension Ltd. | Feature-based registration method |
| US8218847B2 (en) | 2008-06-06 | 2012-07-10 | Superdimension, Ltd. | Hybrid registration method |
| US8932207B2 (en) | 2008-07-10 | 2015-01-13 | Covidien Lp | Integrated multi-functional endoscopic tool |
| US7994773B2 (en) * | 2008-07-11 | 2011-08-09 | Data Security, Inc. | Apparatus and method for in-field magnetic measurements |
| KR200452637Y1 (ko) * | 2008-12-29 | 2011-03-09 | 주식회사 케이씨텍 | 기판 처리장비의 기판 감지장치 |
| DE102009000501A1 (de) * | 2009-01-30 | 2010-08-05 | Biotronik Vi Patent Ag | Degradations- und Integritätsmessgerät für absorbierbare Metallimplantate |
| US8611984B2 (en) | 2009-04-08 | 2013-12-17 | Covidien Lp | Locatable catheter |
| US8308043B2 (en) * | 2009-05-19 | 2012-11-13 | Covidien Lp | Recognition of interchangeable component of a device |
| EP2335553A4 (en) * | 2009-06-01 | 2012-11-07 | Olympus Medical Systems Corp | MEDICAL EQUIPMENT SYSTEM AND METHOD OF CALIBRATING THE MEDICAL INSTRUMENT |
| AU2011210257B2 (en) | 2010-02-01 | 2013-12-19 | Covidien Lp | Region-growing algorithm |
| US10582834B2 (en) | 2010-06-15 | 2020-03-10 | Covidien Lp | Locatable expandable working channel and method |
| EP2423693B1 (en) * | 2010-08-24 | 2020-02-26 | LEM International SA | Toroidal current transducer |
| EP2820382B1 (de) * | 2012-02-29 | 2020-06-03 | IDT Europe GmbH | Vorrichtung und verfahren zur redundanten, absoluten positionsbestimmung eines beweglichen körpers |
| US9585600B2 (en) | 2012-10-02 | 2017-03-07 | Covidien Lp | Magnetic field viewing film for tracking in-situ surgical applications |
| US9179971B2 (en) | 2013-02-11 | 2015-11-10 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Printed electrode catheter |
| US8750961B1 (en) * | 2013-03-07 | 2014-06-10 | Medtronic, Inc. | Implantable medical device having a multi-axis magnetic sensor |
| EP3079575B1 (en) | 2014-01-28 | 2018-12-26 | St. Jude Medical, Cardiology Division, Inc. | Catheter shaft with electrically-conductive traces |
| JP6415589B2 (ja) * | 2014-01-28 | 2018-10-31 | セント・ジュード・メディカル・インターナショナル・ホールディング・エスエーアールエルSt. Jude Medical International Holding S.a,r.l. | パッケージ型電子サブアセンブリを備えた医療用デバイスおよびその製造方法 |
| US10952593B2 (en) | 2014-06-10 | 2021-03-23 | Covidien Lp | Bronchoscope adapter |
| US9754367B2 (en) | 2014-07-02 | 2017-09-05 | Covidien Lp | Trachea marking |
| CN107427204A (zh) | 2014-07-02 | 2017-12-01 | 柯惠有限合伙公司 | 实时自动配准反馈 |
| AU2015284303B2 (en) | 2014-07-02 | 2019-07-25 | Covidien Lp | System and method for detecting trachea |
| US20160000414A1 (en) | 2014-07-02 | 2016-01-07 | Covidien Lp | Methods for marking biopsy location |
| US9770216B2 (en) | 2014-07-02 | 2017-09-26 | Covidien Lp | System and method for navigating within the lung |
| CN106659453B (zh) | 2014-07-02 | 2020-05-26 | 柯惠有限合伙公司 | 用于分割肺部的系统和方法 |
| US9603668B2 (en) | 2014-07-02 | 2017-03-28 | Covidien Lp | Dynamic 3D lung map view for tool navigation inside the lung |
| US10895555B2 (en) | 2015-03-30 | 2021-01-19 | Structural Integrity Associates, Inc. | System for in-line inspection using a dynamic pulsed eddy current probe and method thereof |
| US10426555B2 (en) | 2015-06-03 | 2019-10-01 | Covidien Lp | Medical instrument with sensor for use in a system and method for electromagnetic navigation |
| US10986990B2 (en) | 2015-09-24 | 2021-04-27 | Covidien Lp | Marker placement |
| US10709352B2 (en) | 2015-10-27 | 2020-07-14 | Covidien Lp | Method of using lung airway carina locations to improve ENB registration |
| US10151606B1 (en) | 2016-02-24 | 2018-12-11 | Ommo Technologies, Inc. | Tracking position and movement using a magnetic field |
| WO2017180398A1 (en) * | 2016-04-14 | 2017-10-19 | Medtronic Vascular Inc. | Guide extension catheter with helically-shaped entry port |
| US10478254B2 (en) | 2016-05-16 | 2019-11-19 | Covidien Lp | System and method to access lung tissue |
| US10241081B2 (en) * | 2016-06-20 | 2019-03-26 | Structural Integrity Associates, Inc. | Sensory elements for pulsed eddy current probe |
| US10286196B2 (en) | 2016-06-30 | 2019-05-14 | Integra Lifesciences Switzerland Sàrl | Device to control magnetic rotor of a programmable hydrocephalus valve |
| US10589074B2 (en) | 2016-06-30 | 2020-03-17 | Integra Lifesciences Switzerland Sàrl | Magneto-resistive sensor tool set for hydrocephalus valve |
| US20180042518A1 (en) * | 2016-08-12 | 2018-02-15 | Cardiac Pacemakers, Inc. | Position sensor for a medical probe |
| US11647678B2 (en) | 2016-08-23 | 2023-05-09 | Analog Devices International Unlimited Company | Compact integrated device packages |
| US10898262B2 (en) | 2016-10-25 | 2021-01-26 | Biosense Webster (Israel) Ltd. | Catheter distal end made of plastic tube and flexible printed circuit boards |
| US10629574B2 (en) | 2016-10-27 | 2020-04-21 | Analog Devices, Inc. | Compact integrated device packages |
| US10751126B2 (en) | 2016-10-28 | 2020-08-25 | Covidien Lp | System and method for generating a map for electromagnetic navigation |
| US10418705B2 (en) | 2016-10-28 | 2019-09-17 | Covidien Lp | Electromagnetic navigation antenna assembly and electromagnetic navigation system including the same |
| US10792106B2 (en) | 2016-10-28 | 2020-10-06 | Covidien Lp | System for calibrating an electromagnetic navigation system |
| US10615500B2 (en) | 2016-10-28 | 2020-04-07 | Covidien Lp | System and method for designing electromagnetic navigation antenna assemblies |
| US10722311B2 (en) | 2016-10-28 | 2020-07-28 | Covidien Lp | System and method for identifying a location and/or an orientation of an electromagnetic sensor based on a map |
| US10517505B2 (en) | 2016-10-28 | 2019-12-31 | Covidien Lp | Systems, methods, and computer-readable media for optimizing an electromagnetic navigation system |
| US10446931B2 (en) | 2016-10-28 | 2019-10-15 | Covidien Lp | Electromagnetic navigation antenna assembly and electromagnetic navigation system including the same |
| US10638952B2 (en) | 2016-10-28 | 2020-05-05 | Covidien Lp | Methods, systems, and computer-readable media for calibrating an electromagnetic navigation system |
| US10697800B2 (en) | 2016-11-04 | 2020-06-30 | Analog Devices Global | Multi-dimensional measurement using magnetic sensors and related systems, methods, and integrated circuits |
| US10782114B2 (en) | 2016-12-20 | 2020-09-22 | Boston Scientific Scimed Inc. | Hybrid navigation sensor |
| US20180220926A1 (en) * | 2017-02-06 | 2018-08-09 | Boston Scientific Scimed Inc. | Electromagnetic navigation system with magneto-resistive sensors and application-specific integrated circuits |
| US20180220928A1 (en) * | 2017-02-06 | 2018-08-09 | Boston Scientific Scimed Inc. | Sensor assemblies for electromagnetic navigation systems |
| US11304642B2 (en) * | 2017-02-15 | 2022-04-19 | Biosense Webster (Israel) Ltd. | Multi-axial position sensors printed on a folded flexible circuit board |
| WO2018220215A1 (en) * | 2017-06-01 | 2018-12-06 | Analog Devices Global Unlimited Company | 3-axis magnetic positioning system for minimally invasive surgical instrument, systems and methods thereof |
| US10994108B2 (en) | 2017-09-19 | 2021-05-04 | Integra LifeSciences Switzerland Sárl | Programmable drainage valve with fixed reference magnet for determining direction of flow operable with analog or digital compass toolsets |
| US10850081B2 (en) | 2017-09-19 | 2020-12-01 | Integra LifeSciences Switzerland Sáarl | Implantable bodily fluid drainage valve with magnetic field resistance engagement confirmation |
| US10888692B2 (en) | 2017-09-19 | 2021-01-12 | Integra Lifesciences Switzerland Sàrl | Electronic toolset for use with multiple generations of implantable programmable valves with or without orientation functionality based on a fixed reference magnet |
| US10850080B2 (en) | 2017-09-19 | 2020-12-01 | Integra LifeSciences Switzerland Sárl | Electronic toolset to locate, read, adjust, and confirm adjustment in an implantable bodily fluid drainage system without recalibrating following adjustment |
| US11219489B2 (en) | 2017-10-31 | 2022-01-11 | Covidien Lp | Devices and systems for providing sensors in parallel with medical tools |
| US11628275B2 (en) | 2018-01-31 | 2023-04-18 | Analog Devices, Inc. | Electronic devices |
| US11224392B2 (en) | 2018-02-01 | 2022-01-18 | Covidien Lp | Mapping disease spread |
| US20210093223A1 (en) * | 2018-04-06 | 2021-04-01 | King Abdullah University Of Science And Technology | Cylindrical body having a three-axis magnetic sensor |
| US11298207B2 (en) | 2019-04-04 | 2022-04-12 | Biosense Webster (Israel) Ltd. | Medical instrument identification |
| US12089902B2 (en) | 2019-07-30 | 2024-09-17 | Coviden Lp | Cone beam and 3D fluoroscope lung navigation |
| US20210275255A1 (en) * | 2020-03-09 | 2021-09-09 | Biosense Webster (Israel) Ltd. | Finding roll angle of distal end of deflectable or non-deflectable invasive medical instrument |
| CN115500003A (zh) * | 2022-10-31 | 2022-12-20 | 维沃移动通信有限公司 | 电路板组件和电子设备 |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56124289A (en) * | 1980-03-04 | 1981-09-29 | Sony Corp | Flexible printed board |
| JPS5750864U (ja) * | 1980-09-09 | 1982-03-24 | ||
| JPH0557864U (ja) * | 1992-01-09 | 1993-07-30 | 株式会社ワイ・イー・データ | フレキシブル・プリンテッド・サーキット |
| JPH08510060A (ja) * | 1994-02-28 | 1996-10-22 | フィリップス エレクトロニクス ネムローゼ フェンノートシャップ | 磁束測定装置 |
| US5644230A (en) * | 1994-07-20 | 1997-07-01 | Honeywell Inc. | Miniature magnetometer and flexible circuit |
| JPH09205257A (ja) * | 1995-08-30 | 1997-08-05 | Toshiba Corp | フレキシブルプリント配線板 |
| JPH09318357A (ja) * | 1996-05-31 | 1997-12-12 | Sony Corp | 3次元方位センサ |
| WO2001004656A1 (en) * | 1999-07-13 | 2001-01-18 | Alliedsignal Inc. | Multi-axis magnetic field sensing device and methods for fabricating the same |
| JP2002107107A (ja) * | 2000-07-20 | 2002-04-10 | Biosense Inc | 医療システムの静止金属補償付き校正方法 |
| JP2002232086A (ja) * | 2001-02-06 | 2002-08-16 | Matsushita Electric Ind Co Ltd | フレキシブル基板 |
| JP2003530557A (ja) * | 2000-04-07 | 2003-10-14 | ノーザン・デジタル・インコーポレイテッド | 磁気的な位置または配向の決定における誤差の検出方法 |
| JP2004154556A (ja) * | 1993-10-06 | 2004-06-03 | Biosense Inc | 位置および配向の磁気測定 |
| JP2005128035A (ja) * | 1998-08-02 | 2005-05-19 | Super Dimension Ltd | 電磁場を検出する装置 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4533872A (en) * | 1982-06-14 | 1985-08-06 | Honeywell Inc. | Magnetic field sensor element capable of measuring magnetic field components in two directions |
| US4849692A (en) * | 1986-10-09 | 1989-07-18 | Ascension Technology Corporation | Device for quantitatively measuring the relative position and orientation of two bodies in the presence of metals utilizing direct current magnetic fields |
| US4945305A (en) * | 1986-10-09 | 1990-07-31 | Ascension Technology Corporation | Device for quantitatively measuring the relative position and orientation of two bodies in the presence of metals utilizing direct current magnetic fields |
| US5453686A (en) * | 1993-04-08 | 1995-09-26 | Polhemus Incorporated | Pulsed-DC position and orientation measurement system |
| WO1996005768A1 (en) | 1994-08-19 | 1996-02-29 | Biosense, Inc. | Medical diagnosis, treatment and imaging systems |
| US5391199A (en) * | 1993-07-20 | 1995-02-21 | Biosense, Inc. | Apparatus and method for treating cardiac arrhythmias |
| EP0696356B1 (en) * | 1994-02-28 | 2004-01-07 | Koninklijke Philips Electronics N.V. | Device for measuring magnetic fields |
| US6690963B2 (en) * | 1995-01-24 | 2004-02-10 | Biosense, Inc. | System for determining the location and orientation of an invasive medical instrument |
| JP4166277B2 (ja) * | 1996-02-15 | 2008-10-15 | バイオセンス・ウェブスター・インコーポレイテッド | 体内プローブを用いた医療方法および装置 |
| EP0891152B1 (en) * | 1996-02-15 | 2003-11-26 | Biosense, Inc. | Independently positionable transducers for location system |
| US6184680B1 (en) * | 1997-03-28 | 2001-02-06 | Tdk Corporation | Magnetic field sensor with components formed on a flexible substrate |
| US6239724B1 (en) * | 1997-12-30 | 2001-05-29 | Remon Medical Technologies, Ltd. | System and method for telemetrically providing intrabody spatial position |
| FR2773395B1 (fr) * | 1998-01-05 | 2000-01-28 | Commissariat Energie Atomique | Capteur angulaire lineaire a magnetoresistances |
| DE59912726D1 (de) * | 1998-03-30 | 2005-12-08 | Sentron Ag Zug | Magnetfeldsensor |
| US6536123B2 (en) | 2000-10-16 | 2003-03-25 | Sensation, Inc. | Three-axis magnetic sensor, an omnidirectional magnetic sensor and an azimuth measuring method using the same |
| US7729742B2 (en) * | 2001-12-21 | 2010-06-01 | Biosense, Inc. | Wireless position sensor |
| US7005958B2 (en) * | 2002-06-14 | 2006-02-28 | Honeywell International Inc. | Dual axis magnetic sensor |
| US20040068178A1 (en) * | 2002-09-17 | 2004-04-08 | Assaf Govari | High-gradient recursive locating system |
| US7306593B2 (en) * | 2002-10-21 | 2007-12-11 | Biosense, Inc. | Prediction and assessment of ablation of cardiac tissue |
| KR100743384B1 (ko) * | 2003-07-18 | 2007-07-30 | 아이치 세이코우 가부시키가이샤 | 3차원 자기 방위센서 및 마그네토-임피던스 센서 소자 |
-
2005
- 2005-10-06 US US11/244,719 patent/US7301332B2/en active Active
-
2006
- 2006-09-28 IL IL178388A patent/IL178388A/en unknown
- 2006-10-02 KR KR1020060097278A patent/KR20070038890A/ko not_active Application Discontinuation
- 2006-10-05 CA CA2562623A patent/CA2562623C/en not_active Expired - Fee Related
- 2006-10-05 EP EP06255140A patent/EP1772097A3/en not_active Withdrawn
- 2006-10-05 AU AU2006225255A patent/AU2006225255B8/en not_active Ceased
- 2006-10-05 MX MXPA06011505A patent/MXPA06011505A/es unknown
- 2006-10-05 BR BRPI0604237-6A patent/BRPI0604237A/pt not_active Application Discontinuation
- 2006-10-05 JP JP2006274212A patent/JP5312736B2/ja active Active
- 2006-10-08 CN CN2006101421380A patent/CN1943509B/zh active Active
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56124289A (en) * | 1980-03-04 | 1981-09-29 | Sony Corp | Flexible printed board |
| JPS5750864U (ja) * | 1980-09-09 | 1982-03-24 | ||
| JPH0557864U (ja) * | 1992-01-09 | 1993-07-30 | 株式会社ワイ・イー・データ | フレキシブル・プリンテッド・サーキット |
| JP2004154556A (ja) * | 1993-10-06 | 2004-06-03 | Biosense Inc | 位置および配向の磁気測定 |
| JPH08510060A (ja) * | 1994-02-28 | 1996-10-22 | フィリップス エレクトロニクス ネムローゼ フェンノートシャップ | 磁束測定装置 |
| US5644230A (en) * | 1994-07-20 | 1997-07-01 | Honeywell Inc. | Miniature magnetometer and flexible circuit |
| JPH09205257A (ja) * | 1995-08-30 | 1997-08-05 | Toshiba Corp | フレキシブルプリント配線板 |
| JPH09318357A (ja) * | 1996-05-31 | 1997-12-12 | Sony Corp | 3次元方位センサ |
| JP2005128035A (ja) * | 1998-08-02 | 2005-05-19 | Super Dimension Ltd | 電磁場を検出する装置 |
| WO2001004656A1 (en) * | 1999-07-13 | 2001-01-18 | Alliedsignal Inc. | Multi-axis magnetic field sensing device and methods for fabricating the same |
| JP2003530557A (ja) * | 2000-04-07 | 2003-10-14 | ノーザン・デジタル・インコーポレイテッド | 磁気的な位置または配向の決定における誤差の検出方法 |
| JP2002107107A (ja) * | 2000-07-20 | 2002-04-10 | Biosense Inc | 医療システムの静止金属補償付き校正方法 |
| JP2002232086A (ja) * | 2001-02-06 | 2002-08-16 | Matsushita Electric Ind Co Ltd | フレキシブル基板 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009052963A (ja) * | 2007-08-24 | 2009-03-12 | Denso Corp | 磁気ベクトル分布測定プローブ |
| JP2011513722A (ja) * | 2008-02-26 | 2011-04-28 | ユニベルシテ・クロード・ベルナール・リヨン・プルミエ | 磁場センサの製造方法および同製造方法によって製造された磁場センサ |
| JP2013506538A (ja) * | 2009-10-06 | 2013-02-28 | スミス アンド ネフュー インコーポレーテッド | 整形外科装置の目標物(landmark)の標的化 |
| JP2016502912A (ja) * | 2013-01-16 | 2016-02-01 | セント・ジュード・メディカル,カーディオロジー・ディヴィジョン,インコーポレイテッド | 可撓性の高密度マッピング・カテーテル・チップおよびオンボード高密度マッピング電極を備える可撓性のアブレーション・カテーテル・チップ |
| JP2017049240A (ja) * | 2015-09-01 | 2017-03-09 | ゼネラル・エレクトリック・カンパニイ | 多軸磁気抵抗センサパッケージ |
| JP2018054461A (ja) * | 2016-09-29 | 2018-04-05 | 大同特殊鋼株式会社 | 3軸磁気センサ、連結モジュール、及びセンサプローブ |
| JP2020513882A (ja) * | 2016-12-19 | 2020-05-21 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | 優位軸航行センサ |
| US11058321B2 (en) | 2016-12-20 | 2021-07-13 | Boston Scientific Scimed Inc. | Current driven sensor for magnetic navigation |
| JP2018113439A (ja) * | 2016-12-23 | 2018-07-19 | バイオセンス・ウエブスター・(イスラエル)・リミテッドBiosense Webster (Israel), Ltd. | 単層プリント回路上の三軸センサ |
| US10835151B2 (en) | 2017-02-06 | 2020-11-17 | Boston Scientific Scimed Inc. | Sensor assemblies for electromagnetic navigation systems |
Also Published As
| Publication number | Publication date |
|---|---|
| IL178388A0 (en) | 2007-02-11 |
| KR20070038890A (ko) | 2007-04-11 |
| AU2006225255B2 (en) | 2010-06-03 |
| US7301332B2 (en) | 2007-11-27 |
| CA2562623A1 (en) | 2007-04-06 |
| AU2006225255B8 (en) | 2010-06-17 |
| MXPA06011505A (es) | 2007-04-09 |
| CA2562623C (en) | 2012-08-21 |
| US20070080682A1 (en) | 2007-04-12 |
| BRPI0604237A (pt) | 2007-08-21 |
| CN1943509A (zh) | 2007-04-11 |
| EP1772097A3 (en) | 2007-09-19 |
| CN1943509B (zh) | 2012-11-14 |
| EP1772097A2 (en) | 2007-04-11 |
| JP5312736B2 (ja) | 2013-10-09 |
| AU2006225255A1 (en) | 2007-04-26 |
| IL178388A (en) | 2010-12-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5312736B2 (ja) | 磁気センサーアセンブリ | |
| JP7445372B2 (ja) | 多軸磁気抵抗センサパッケージ | |
| JP4762919B2 (ja) | プリント回路を有するコア上の小型コイル | |
| EP3363359B1 (en) | Multi-axial position sensors printed on a folded flexible circuit board and method of producing the same | |
| JP2007147593A5 (ja) | ||
| CN111374662A (zh) | 使用多极电极组件标测ecg信号 | |
| CN107768315B (zh) | 紧凑集成器件封装 | |
| US20180220928A1 (en) | Sensor assemblies for electromagnetic navigation systems | |
| CN110478031B (zh) | 用于包括位置传感器的导管的校准夹具 | |
| US10835151B2 (en) | Sensor assemblies for electromagnetic navigation systems | |
| WO2023215148A1 (en) | Medical device assemblies and components | |
| JP2020000862A (ja) | 補償導線による磁気ピックアップの相殺 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20071128 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20081017 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090820 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090820 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110317 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110419 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110713 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120117 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120417 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120420 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120511 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121211 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130403 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20130410 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130625 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130703 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5312736 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |