JP2007114709A - 像ぶれ補正装置 - Google Patents
像ぶれ補正装置 Download PDFInfo
- Publication number
- JP2007114709A JP2007114709A JP2005308900A JP2005308900A JP2007114709A JP 2007114709 A JP2007114709 A JP 2007114709A JP 2005308900 A JP2005308900 A JP 2005308900A JP 2005308900 A JP2005308900 A JP 2005308900A JP 2007114709 A JP2007114709 A JP 2007114709A
- Authority
- JP
- Japan
- Prior art keywords
- slider
- holding frame
- motor
- substrate
- image blur
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Abstract
【課題】補正レンズを高精度で移動させることができ、構成部品の種類の少ない像ぶれ補正装置を提供する。
【解決手段】像ぶれ補正装置30は、結像光学系によって形成される像のぶれを補正する補正レンズ20Aと、光軸Oに直交する面内で移動自在に支持された補正レンズ20Aの保持枠34と、X方向、Y方向にそれぞれスライド自在に支持されるとともに保持枠34に係合されたXスライダー36及びYスライダー38と、スライダー36、38をそれぞれX方向、Y方向に移動させるXモータ40及びYモータ42と、を備える。Xモータ40、Yモータ42は、コイル58がプリントされた共通の基板60を使用する。基板60の表面60Aには端子62、62が設けられ、基板60の裏面60Bには端子63、63が設けられる。
【選択図】 図4
【解決手段】像ぶれ補正装置30は、結像光学系によって形成される像のぶれを補正する補正レンズ20Aと、光軸Oに直交する面内で移動自在に支持された補正レンズ20Aの保持枠34と、X方向、Y方向にそれぞれスライド自在に支持されるとともに保持枠34に係合されたXスライダー36及びYスライダー38と、スライダー36、38をそれぞれX方向、Y方向に移動させるXモータ40及びYモータ42と、を備える。Xモータ40、Yモータ42は、コイル58がプリントされた共通の基板60を使用する。基板60の表面60Aには端子62、62が設けられ、基板60の裏面60Bには端子63、63が設けられる。
【選択図】 図4
Description
本発明は像ぶれ補正装置に係り、特に薄型カメラ等の携帯機器における像ぶれ補正装置に関する。
カメラの像ぶれ補正装置は、撮影光軸に直交する面内で補正レンズを移動自在に支持し、カメラに振動が加わった際に、その振動を打ち消す方向に補正レンズをアクチュエータで移動させることによって像ぶれを補正している。例えば、特許文献1に記載の像ぶれ補正装置は、補正レンズの固定枠をピッチ方向に移動自在となるように第1保持枠で保持し、この第1保持枠をヨー方向に移動自在となるように第2保持枠に保持している。そして、固定枠に取り付けたピッチコイルや、第1保持枠に取り付けたヨーコイルを用いて、補正レンズをピッチ方向或いはヨー方向に移動させて、像ぶれを補正している。
近年では、屈曲光学系を用いることによって薄型化したデジタルカメラが開発されている。このような薄型のデジタルカメラにおいても、上述した像ぶれ補正装置を搭載したいとの要望がある。
特許2641172号
しかしながら、特許文献1に記載の像ぶれ補正装置は、ピッチ方向とヨー方向とで構成が異なるため、構成部品の種類が多いという問題があった。また、ピッチ方向とヨー方向では、補正レンズの移動特性が異なり、補正レンズを高精度で移動させることができないという問題があった。
本発明はこのような事情に鑑みてなされたもので、補正レンズを高精度で移動させることができ、部品の種類の少ない像ぶれ補正装置を提供することを目的とする。
請求項1記載の発明は前記目的を達成するために、結像光学系によって形成される像のぶれを補正する補正光学系と、前記補正光学系を保持するとともに、前記結像光学系の光軸に直交する面内で移動自在に支持される保持枠と、前記光軸に直交し、異なる第1、第2の方向にそれぞれスライド自在に支持されるとともに、前記保持枠に係合される第1、第2のスライダーと、コイルを支持するとともに前記第1、第2のスライダーに取りつけられる基板を有し、前記コイルに通電することによって前記第1、第2のスライダーをそれぞれ、前記第1、第2の方向に移動させる第1、第2のアクチュエータと、を備え、前記基板は、第1、第2のスライダーの両方に適用できるように、前記コイルの接続端子が、表面と裏面の同一対応位置に形成されたことを特徴とする。
請求項1に記載の発明によれば、基板の両面にコイルの接続端子を設けることによって、第1、第2のアクチュエータで基板を共通化したので、構成部品の種類を減らすことができる。また、請求項1に記載の発明によれば、第1、第2のアクチュエータで共通の基板を用いるようにしたので、保持枠の移動特性が第1、第2の方向で等しくなり、補正光学系を高精度で移動させることができる。
請求項2に記載の発明は請求項1に記載の発明において、前記第1、第2のスライダーは対称形状で形成されたことを特徴とする。
請求項2に記載の発明によれば、第1、第2のスライダーが対称形状になっているので、保持枠の移動特性が第1、第2の方向で等しくなり、補正光学系を高精度で移動させることができる。
本発明によれば、第1のアクチュエータと第2のアクチュエータにおいて共通の基板を用いるので、構成部品の種類を減らすことができるとともに、第1のアクチュエータと第2のアクチュエータとで移動特性が等しくなり、保持枠を高精度で移動させることができる。
以下、添付図面に従って本発明に係る像ぶれ補正装置の好ましい実施の形態を説明する。図1は本発明に係る像ぶれ補正装置が適用されたデジタルカメラ10を示す斜視図である。同図に示すデジタルカメラ10は、ケース11が薄型の矩形状に形成されており、このケース11の正面には、撮影レンズの第1レンズ群16を構成する固定レンズ16A、ストロボの発光部13、及びストロボ用の調光センサ15が配設される。また、ケース11の上面にはシャッターボタン14、電源スイッチ17が配設される。以下、ケース11を正面から見て左右方向をX方向、奥行き(厚さ)方向をY方向、高さ方向をZ方向とする。
図2は、デジタルカメラ10の縦断面図である。同図に示すように、ケース11の内部にはカメラ本体12が設けられ、さらにカメラ本体12の内部には第1レンズ群16、第2レンズ群18、第3レンズ群20、及び第4レンズ群22が設けられる。第1レンズ群16、第2レンズ群18、及び第4レンズ群22は結像光学系を構成しており、第3レンズ群20は結像光学系によって得られる像のぶれを補正する補正光学系を構成している。
第1レンズ群16は、ケース11の正面に配置された固定レンズ16Aと、固定レンズ16の内側(奥側)に配置されたプリズム16Bと、プリズム16Bの下方に配置された固定レンズ16Cとによって構成され、固定レンズ16Aを介して得られる観察像の光路をプリズム16Bによって下方に90°屈曲している。
第2レンズ群18、第3レンズ群20、及び第4レンズ群22は、第1レンズ群16の下方、すなわちZ方向の光軸(以下、単に光軸Oという)に沿って配置されている。
第2レンズ群18及び第4レンズ群22は、光軸Oに沿ってスライド自在に配置されており、不図示の駆動手段によって光軸O方向にスライド移動する。第2レンズ群18をスライドさせることによってズーム操作が行われ、第4レンズ群22をスライドさせることによってフォーカス操作が行われる。
第4レンズ群22の下方の結像位置24には、CCD26が配設される。なお、図2の符号28は、細かな凹凸が繰り返し形成された反射防止面であり、第1レンズ群16の固定レンズ16Aから入射した光が反射することを防止している。符号27はシャッターである。
第3レンズ群20は、可動式の補正レンズ20Aと、固定式の補正レンズ20Bとを備え、可動式の補正レンズ20Aを光軸Oに直交する面内で(すなわち、XY平面内で)移動させることによって、像のぶれを補正している。以下、補正レンズ20Aを移動させる像ぶれ補正装置30の構成について説明する。
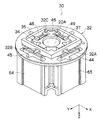
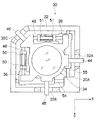
図3は像ぶれ補正装置30を示す斜視図であり、図4はその分解斜視図である。また、図5は、像ぶれ補正装置30の平面図であり、図6は図5の保持枠34を取り除いた平面図である。
図4に示すように、像ぶれ補正装置30は主として、略筒状の本体32と、この本体32に移動自在に支持され、補正レンズ20Aを保持する保持枠34と、保持枠34に係合されるXスライダー36及びYスライダー38と、Xスライダー36及びYスライダー38をそれぞれX方向、Y方向に駆動するためのXモータ40及びYモータ42(アクチュエータに相当)とによって構成される。
図4に示すように保持枠34には、三本のガイドバー44、45、46が取りつけられている。ガイドバー44は、図5に示すように、保持枠34のY方向の側面の略中央位置に、X方向に沿って取りつけられている。ガイドバー45は、保持枠34のX方向の側面の略中央位置に、Y方向に沿って取りつけられている。ガイドバー46は、ガイドバー44、45から最も離れた保持枠34のコーナー部に、対角線方向に沿って取りつけられている。
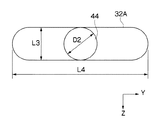
各ガイドバー44〜46はそれぞれ、本体32の溝32A〜32Cに差し込まれている。図8に示すように、溝32Aは、光軸O方向(Z方向)の寸法L3がガイドバー44の直径D2と略同寸法で形成されるとともに、光軸Oに直交する方向(Y方向)の寸法L4がガイドバー44の直径D2よりも大きく形成されている。したがって、ガイドバー44は、溝32Aに対して、光軸O方向に隙間がない状態で係合され、且つ、光軸Oに直交する方向に移動自在に支持される。
同様に、図5の溝32Bは、光軸O方向の寸法がガイドバー45の直径と略同寸法で形成され、且つ、光軸Oに直交する方向の寸法がガイドバー45の直径よりも大きく形成されている。また、溝32Cは、光軸O方向の寸法がガイドバー46の直径と略同寸法で形成され、且つ、光軸Oに直交する方向の寸法がガイドバー46の直径よりも大きく形成されている。したがって、ガイドバー45、46は、溝32B、32Cに対して、光軸O方向に隙間がない状態で係合され、且つ、光軸Oに直交する方向に移動自在に支持される。これにより、保持枠34は、光軸O方向にガタのない状態で、且つ、光軸Oに直交する方向に移動自在に支持される。
また、保持枠34には、ガイドバー44が取り付けられた側面と反対側の側面に、可動ガイド軸48がY方向に沿って取り付けられている。さらに、保持枠34には、ガイドバー45が取りつけられた側面と反対側の側面に、可動ガイド軸49がX方向に沿って取り付けられている。これらの可動ガイド軸48、49にはそれぞれ、Xスライダー36、Yスライダー38がスライド自在に係合されている。
図6、図7に示すように、Xスライダー36とYスライダー38は、平面対称となる形状で形成されている。すなわち、図6に示すように、Xスライダー36は平面図において略L状に形成されており、Yスライダー38は、二点鎖線で示す対称面に対してXスライダー36の平面対称形状となるように、逆L状に形成される。
Xスライダー36には、前述した可動ガイド軸48(図5参照)が挿通されるガイド孔50、50が形成されている。Xスライダー36は、このガイド孔50、50に可動ガイド軸48が挿通されることによって、保持枠34に対してY方向にスライド自在に係合されている。
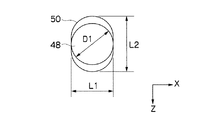
図7、図9に示すように、各ガイド孔50は、X方向よりもZ方向に長い長円状に形成されている。具体的には、ガイド孔50のX方向の寸法L1は、可動ガイド軸48の外径寸法D1と略同寸法で形成されており、ガイド孔50のZ方向の寸法L2は、可動ガイド軸48の外径寸法D1よりも大きく形成されている。したがって、可動ガイド軸48をガイド孔50に挿通させると、X方向に隙間がない状態で可動ガイド軸48とガイド孔50とが係合される。よって、Xスライダー36をX方向に移動させた際、可動ガイド軸48を介して保持枠34をX方向に精度良く移動させることができる。一方で、Z方向には隙間があるので、可動ガイド軸48をガイド孔50に容易に挿通させることができ、組立性が良い。
図7に示すように、Xスライダー36には、貫通孔52がX方向に形成されている。この貫通孔52には、図6に示す固定ガイド軸54が挿通される。固定ガイド軸54は、X方向に沿って配置され、その両端部が本体32に固定される。これにより、Xスライダー36が本体32にX方向にスライド自在に支持される。なお、貫通孔52の断面形状は特に限定するものではないが、円形でもよいし、ガイド孔50のようにZ方向に長い長円状に形成してもよい。
図4に示すように、Xスライダー36には、基板60が光軸Oと平行になるように取り付けられる。基板60には、Xモータ40を構成するコイル58がプリントされている。コイル58は、図10(A)、図10(B)に示すように、Z方向に長い長円状に形成される。また、コイル58は複数層に重ねてプリントされており、その端子は基板60の両面に設けられている。すなわち、図10(A)に示すように基板60の表面60Aには端子62、62が設けられ、図10(B)に示すように基板60の裏面60Bには端子63、63が設けられる。したがって、端子62、62と端子63、63の一方を導線に接続すれば、コイル58に電流を流すことができる。Xスライダー36に装着される基板60は、内側の端子63、63に導線が接続される。
基板60には、係合突起60C、係合孔60D、60Dが形成されている。この係合突起60C、係合孔60D、60Dをそれぞれ、図4のXスライダー36の係合溝(不図示)、係合ピン56、56に係合することによって、基板60がXスライダー36に取り付けられる。
Xモータ40は、前述したコイル58と、本体32に取りつけられた板状のマグネット64及びヨーク66で構成される。マグネット64及びヨーク66は、コイル58を挟んで対向して配置されており、本体32に固定されている。マグネット64は、コイル58の位置で、磁力線がY方向に形成されるようにN極とS極が配置されており、ヨーク66は、その磁力線が強くなるように構成される。このように構成されたXモータ40は、コイル58に通電することによって、コイル58を保持したXスライダー36がX方向に移動される。したがって、Xスライダー36に可動ガイド軸48を介して係合した保持枠34をX方向に駆動することができる。
一方、Yスライダー38には、前述した可動ガイド軸49が挿通されるガイド孔51、51が形成されている。Yスライダー38は、このガイド孔51、51に可動ガイド軸49が挿通されることによって、保持枠34に対してX方向にスライド自在に係合されている。
各ガイド孔51は、図8に示したガイド孔50と同様に、Z方向に長い長円状に形成されている。具体的には、ガイド孔51のY方向の寸法が可動ガイド軸49の外径と略同寸法で形成されており、ガイド孔51のZ方向の寸法が可動ガイド軸49の外径よりも大きく形成されている。したがって、可動ガイド軸49をガイド孔51に挿通させると、Y方向に隙間がない状態で、可動ガイド軸49とガイド孔51とが係合される。よって、Yスライダー38をY方向に移動させた際、可動ガイド軸49を介して保持枠34をY方向に精度良く移動させることができる。一方で、Z方向に隙間があるので、可動ガイド軸49をガイド孔51に容易に挿通させることができ、組立性が良い。
また、Yスライダー38には、貫通孔53がY方向に形成されており、この貫通孔53に固定ガイド軸55が挿通される。固定ガイド軸55は、Y方向に沿って配置され、その両端部が本体32に固定される。これにより、Yスライダー38が本体32にY方向にスライド自在に支持される。なお、貫通孔53の断面形状は特に限定するものではないが、円形でもよいし、ガイド孔51のようにZ方向に長い長円状に形成してもよい。
Yスライダー38には、基板60が光軸Oと平行になるように取りつけられている。この基板60は、前述したXスライダー36に取りつけられた基板60と同じものであり、基板60には、係合突起60C、係合孔60D、60Dが形成されている。この係合突起60C、係合孔60D、60Dを、Yスライダー38の係合溝(不図示)、係合ピン57、57に係合することによって基板60がYスライダー38に取りつけられる。その際、基板60は、Xスライダー36とYスライダー38とで、異なる姿勢で取りつけられる。すなわち、Xスライダー36には、基板60の表面60Aが外側を向く姿勢で取りつけられ(図10(A)参照)、Yスライダー38には、基板60の裏面60Bが外側を向く姿勢(図10(B)参照)で取りつけられる。Yスライダー38に取りつけられた基板60は、内側の端子62、62に導線が接続され、この導線を介して電流が供給される。
Yモータ42は、前述したコイル58と、本体32に取りつけられた板状のマグネット65及びヨーク67で構成される。マグネット65及びヨーク67は、コイル58を挟んで対向して配置されており、本体32に固定されている。マグネット65は、コイル58の位置で、磁力線がX方向に形成されるようにN極とS極が配置されており、ヨーク67は、その磁力線が強くなるように構成されている。このように構成されたYモータ42は、コイル58に通電することによって、コイル58を保持したYスライダー38がY方向に移動される。したがって、Yスライダー38に可動ガイド軸49を介して係合した保持枠34をY方向に駆動することができる。
上述したXスライダー36、Yスライダー38、Xモータ40、及びYモータ42は、保持枠34の被写体側にまとめて配設されるとともに、図3に示すように、略筒状の本体32内に組み込まれ、ユニット化されている。したがって、像ぶれ補正装置30を小型化することができ、且つ、カメラ10に容易に組み込むことができる。
なお、像ぶれ補正装置30には、Xスライダー36、Yスライダー38の位置を検出する位置検出センサ(不図示)を設けるとよい。位置検出センサの種類は特に限定するものではないが、たとえばXスライダー36、Yスライダー38に取りつけられたホール素子と、このホール素子に対向して配置され、且つ、本体32に固定されたマグネットによって構成するとよい。これにより、Xスライダー36、Yスライダー38の位置、すなわち、保持枠34の位置を制御することができる。
また、カメラ10のカメラ本体12に、振動検出センサ(不図示)を設け、このセンサの検出値に応じてXモータ40、Yモータ42を駆動制御するとよい。
次に上記の如く構成された像ぶれ補正装置30の作用について説明する。
カメラ10の振動をセンサ(不図示)で検出した際、その検出した振動の方向に応じて、Xモータ40またはYモータ42若しくは両方のモータ40、42が駆動される。Xモータ40が駆動されると、コイル58に通電され、コイル58を保持したXスライダー36がX方向に移動する。したがって、Xスライダー36に可動ガイド軸48を介して係合した保持枠34がX方向に移動し、補正レンズ20AがX方向に移動する。その際、Yスライダー38は、保持枠34に対してX方向にスライド自在に係合しているので、移動しない。したがって、Xモータ40を駆動した際に、Yスライダー38やYモータ42を移動させることなくXスライダー36のみを独立して移動させることができ、保持枠34を迅速に移動させることができる。
また、Xモータ40を駆動した際、可動ガイド軸48とXスライダー36のガイド孔50がX方向に隙間のない状態で係合しているので、保持枠34をX方向に高精度で移動させることができる。このように、本実施の形態によれば、Xモータ40を駆動した際に保持枠34をX方向に高精度で迅速に移動させることができる。
同様に、Yモータ42を駆動した際には、コイル58を保持したYスライダー38がY方向に移動する。したがって、Yスライダー38に可動ガイド軸49を介して係合した保持枠34がY方向に移動し、補正レンズ20AがY方向に移動する。その際、Xスライダー36は、保持枠34に対してY方向にスライド自在に係合しているので、移動しない。したがって、Yモータ42を駆動した際に、Xスライダー36やXモータ40を移動させることなくYスライダー38のみを独立して移動させることができ、保持枠34を迅速に移動させることができる。
また、Yモータ42を駆動した際、可動ガイド軸49とYスライダー38のガイド孔51がY方向に隙間のない状態で係合しているので、保持枠34をY方向に高精度で移動させることができる。このように本実施の形態によれば、Yモータ42を駆動した際に保持枠34をY方向に高精度で迅速に移動させることができる。
ところで、本実施の形態の像ぶれ補正装置30は、上述したように、Xスライダー36とYスライダー38とが平面対称形状で形成されるとともに、基板60の表面60Aに端子62、62が設けられ、裏面60Bに端子63、63が設けられている。したがって、Xモータ40とYモータ42とで同じ構成の基板60を用いることができ、Xスライダー36とYスライダー38の両方に、基板60、60を装着して使用することができる。
このように本実施の形態によれば、同じ構成の基板60を用いるようにしたので、構成部品の種類を減らすことができる。特に、本実施の形態では、単価の高い基板60を共通化したので、コストを大幅に削減することができる。
また、本実施の形態によれば、Xスライダー36とYスライダー38とが平面対称形状で形成されている。したがって、保持枠34をX方向に移動する機構と、保持枠34をY方向に移動する機構とが平面対称形状になっている。これにより、保持枠34のX方向への移動する際と、Y方向への移動する際とで、移動特性が等しくなる。したがって、保持枠34の移動方向によって移動速度にバラツキが生じることがなく、保持枠34を常に高精度で移動させることができる。
図11は、図4と異なる構成の像ぶれ補正装置70を示す分解斜視図である。同図において、図4の像ぶれ補正装置30と同様の構成、作用を有する部材については同じ符号を付して、その説明を省略する。
図11に示すように、像ぶれ補正装置70は主として、補正レンズ20Aを保持する保持枠71と、この保持枠71を支持する第1、第2のスライダー72、73と、この第1、第2のスライダー72、73を移動させる第1、第2のボイスコイルモータ(以下、第1モータ、第2モータという)74、75と、鏡胴76とで構成される。
保持枠71は、その外形が略矩形状に形成されている。また保持枠71は、光軸Oに直交する面内において、直交する二方向に移動自在に支持されている。以下、この二方向をP(ピッチ)方向、Y(ヨー)方向とする。保持枠71の側面には、P方向に配置されたPガイド棒77と、Y方向に配置されたYガイド棒78が取り付けられる。
一方、鏡胴76には、P方向に配置されたPガイド棒79と、Y方向に配置されたYガイド棒80とが保持されている。Pガイド棒77、Yガイド棒78はそれぞれ、光軸Oを挟んでPガイド棒79、Yガイド棒80の反対側に配置される。
第1スライダー72は、略L状に形成されており、P方向の二つのガイド孔72P(一つのみ図示)が形成される。このガイド孔72Pに前述のPガイド棒79を挿通させることによって、第1スライダー72が鏡胴76に対してP方向にスライド自在に支持される。
また、第1スライダー72には、Y方向の二つのガイド孔72Y、72Yが形成される。このガイド孔72Y、72Yに前述のYガイド棒78を挿通させることによって、第1スライダー72が保持枠71に対してY方向に移動自在に支持される。
第2スライダー73は、第1スライダー72に対して平面対称となる形状に形成されており、略逆L状に形成されている。この第2スライダー73には、Y方向の二つのガイド孔73Y(一つのみ図示)が形成される。このガイド孔73Yに前述のガイド棒80を挿通させることによって、第2スライダー73が鏡胴76に対してY方向にスライド自在に支持される。
また、第2スライダー73には、P方向の二つのガイド孔73P、73Pが形成される。このガイド孔73P、73Pに前述のPガイド棒77を挿通させることによって、第2スライダー73が保持枠71に対してP方向に移動自在に支持される。
なお、図11の符号81、81…は、ゴムやウレタン樹脂等の衝撃吸収材から成る緩衝部材であり、筒状に形成されてPガイド棒77、79やYガイド棒78、80に挿通された状態で取りつけられる。この緩衝部材81、81…によって、第1スライダー72、第2スライダー73が、保持枠71や鏡胴76に衝突して破損することを防止することができる。
また、図11の符号82は、位置検出センサを構成するマグネットであり、鏡胴76に取りつけられている。このマグネット82に対向して、不図示のホール素子が第1スライダー72、第2スライダー73に取りつけられる。この位置検出センサの測定値に基づいて、第1モータ74、第2モータ75が駆動制御される。
第1モータ74は主として、基板83、マグネット84、ヨーク85、及び、円盤型ヨーク86によって構成される。同様に、第2モータ75は、基板83、マグネット87、ヨーク88、及び、円盤型ヨーク86によって構成される。円盤型ヨーク86は、第1モータ74と第2モータ75とで兼用される。また、基板83は、後述するように、第1モータ74と第2モータ75とで共通のものが使用される。
マグネット84、87はそれぞれヨーク85、88の上に固定されており、鏡胴76に取りつけられることによって、基板83、83に対向するように配置される。一方、円盤型ヨーク86は、金属板によってリング状に形成されており、鏡胴76に取りつけられることによって基板83、83に対向するようにして配置される。
基板83には、コイル90がプリントされており、このコイル90はY方向に長い長円状に形成されるとともに複数層に重ねてプリントされる。コイル90の端子は基板の両面に設けられている。すなわち、基板83の一方の面には、端子91、91が設けられ、基板83のもう一方の面には端子92、92が設けられる。また、基板83には、取付孔93、93が形成されており、この取付孔93、93に、第1スライダー72または第2スライダー73に設けた係合突起(不図示)を挿入することによって、第1スライダー72または第2スライダー73に基板83が取りつけられる。
第1モータ74の基板83は、端子91、91側の面が当接するように第1スライダー72に取りつけられ、端子92、92に不図示の導線が接続される。第2モータ75の基板83は、端子92、92側の面が当接するように第2スライダー74に取りつけられ、端子91、91に不図示の導線が接続される。
次に上記の如く構成された像ぶれ補正装置70の作用について説明する。
第1モータ74を駆動すると、第1モータ74の基板83を支持する第1スライダー72に駆動力が伝わり、第1スライダー72がP方向に移動する。これにより、第1スライダー72にYガイド棒78を介して取り付けられた保持枠71がP方向に移動し、補正レンズ20AがP方向に移動する。その際、第2スライダー73は保持枠71に対してP方向にスライド自在に支持されているので、第2スライダー73が移動することがない。すなわち、第1モータ74を駆動すると、第2スライダー73、第2モータ75は移動せずに、第1スライダー72のみが独立して移動する。
一方、第2モータ75を駆動すると、第2モータ75の基板83を支持する第2スライダー73に駆動力が伝わり、第2スライダー75がY方向に移動する。これにより、第2スライダー73にPガイド棒77を介して取り付けられた保持枠71がY方向に移動し、補正レンズ20AがY方向に移動する。その際、第1スライダー72は保持枠71に対してY方向にスライド自在に支持されているので、第1スライダー72が移動することがない。すなわち、第2モータ75を駆動すると、第1スライダー72、第1モータ74は移動せずに、第2スライダーのみが独立して移動する。
このように本実施の形態によれば、第1モータ74、第2モータ75をそれぞれ駆動することによって、第1スライダー72、第2スライダー73が独立して移動するので、少ない動力で補正レンズ20Aの保持枠71をP方向、Y方向に移動させることができ、且つ、保持枠71を迅速、且つ正確に移動させることができる。
また、本実施の形態の像ぶれ補正装置70は、第1スライダー72と第2スライダー73とを平面対称形状に形成するとともに、基板83の両面に端子91、91、92、92を設けることによって、第1モータ74と第2モータ75とで、共通の基板83を使用できるように構成している。よって、第1モータ74と第2モータ75とで同じ構成の基板83を用いることができ、構成部品の種類を減らすことができる。特に、本実施の形態では、単価の高い基板83を共通化したので、コストを大幅に削減することができる。
また、本実施の形態によれば、第1スライダー72と第2スライダー73とが平面対称形状で形成されており、保持枠71をP方向に移動する機構とY方向に移動させる機構とが平面対称になっている。したがって、保持枠71のP方向への移動と、Y方向への移動とで移動特性が等しくなり、保持枠71を常に高精度で移動させることができる。
10…デジタルカメラ、12…カメラ本体、20A…補正レンズ、30…像ぶれ補正装置、32…本体、34…保持枠、36…Xスライダー、38…Yスライダー、40…Xモータ、42…Yモータ、58…コイル、60…基板、62、63…端子、64、65…マグネット、66、67…ヨーク
Claims (2)
- 結像光学系によって形成される像のぶれを補正する補正光学系と、
前記補正光学系を保持するとともに、前記結像光学系の光軸に直交する面内で移動自在に支持される保持枠と、
前記光軸に直交し、異なる第1、第2の方向にそれぞれスライド自在に支持されるとともに、前記保持枠に係合される第1、第2のスライダーと、
コイルを支持するとともに前記第1、第2のスライダーに取りつけられる基板を有し、前記コイルに通電することによって前記第1、第2のスライダーをそれぞれ、前記第1、第2の方向に移動させる第1、第2のアクチュエータと、
を備え、
前記基板は、第1、第2のスライダーの両方に適用できるように、前記コイルの接続端子が、表面と裏面の同一対応位置に形成されたことを特徴とする像ぶれ補正装置。 - 前記第1、第2のスライダーは対称形状で形成されたことを特徴とする請求項1に記載の像ぶれ補正装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005308900A JP2007114709A (ja) | 2005-10-24 | 2005-10-24 | 像ぶれ補正装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005308900A JP2007114709A (ja) | 2005-10-24 | 2005-10-24 | 像ぶれ補正装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007114709A true JP2007114709A (ja) | 2007-05-10 |
Family
ID=38096913
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005308900A Pending JP2007114709A (ja) | 2005-10-24 | 2005-10-24 | 像ぶれ補正装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007114709A (ja) |
-
2005
- 2005-10-24 JP JP2005308900A patent/JP2007114709A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP4220267B1 (en) | Auto focus and optical image stabilization in a compact folded camera | |
| JP6960983B2 (ja) | 手振れ補正機能付き撮像装置 | |
| JP5063739B2 (ja) | レンズ駆動装置 | |
| US9091802B2 (en) | Flexible printed circuit board and small camera apparatus including the same | |
| US20100091120A1 (en) | Optical unit with shake correcting function | |
| US12126885B2 (en) | Camera module with sensor shifting module | |
| JP2012120303A (ja) | アクチュエータ、ならびにこれを備える駆動装置及び撮像装置 | |
| WO2013046816A1 (ja) | 像振れ補正装置及びそれを備えた撮像装置 | |
| JP2012242768A (ja) | 撮像装置 | |
| US12262114B2 (en) | Camera module with sensor shifting module | |
| US12407927B2 (en) | Sensor shifting module and camera module having the same | |
| JP2006350157A (ja) | 像ぶれ補正装置、該像ぶれ補正装置を備えたレンズ鏡筒、光学機器 | |
| JP2008045919A (ja) | 位置検出装置、ブレ補正装置、レンズ鏡筒及び光学機器 | |
| JP6376801B2 (ja) | 像ブレ補正装置、レンズ鏡筒、及び光学機器 | |
| US12276811B2 (en) | Sensor shifting actuator and camera module including sensor shifting actuator | |
| JP2008096773A (ja) | ブレ補正機構及び光学機器 | |
| JP2011039103A5 (ja) | ||
| JP5214425B2 (ja) | レンズ駆動装置 | |
| JP2006243704A (ja) | 像ぶれ補正装置及び撮像装置 | |
| JP2011053600A (ja) | レンズ駆動装置 | |
| JP2007148023A (ja) | 像ぶれ補正装置及びそれを用いた撮像装置 | |
| JP2010271513A (ja) | 光学防振装置及び光学機器 | |
| JP2018018055A (ja) | 像振れ補正装置 | |
| US8165462B2 (en) | Shake correction module for photographing apparatus and photographing apparatus including the same | |
| JP5208691B2 (ja) | 像ぶれ補正装置 |