JP2007010554A - 測位装置 - Google Patents
測位装置 Download PDFInfo
- Publication number
- JP2007010554A JP2007010554A JP2005193625A JP2005193625A JP2007010554A JP 2007010554 A JP2007010554 A JP 2007010554A JP 2005193625 A JP2005193625 A JP 2005193625A JP 2005193625 A JP2005193625 A JP 2005193625A JP 2007010554 A JP2007010554 A JP 2007010554A
- Authority
- JP
- Japan
- Prior art keywords
- positioning
- calculating
- time constant
- reliability
- receiver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
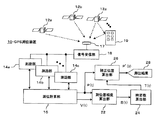
【解決手段】車両に搭載されたGPS測位装置10の測位計算部16は、複数のGPS衛星12からの擬似距離によって求められた位置ベクトルP(t)と、ドップラー周波数から算出された移動速度の速度ベクトルV(t)を測位信頼度算出部22に出力する。次に、測位信頼度算出部22は、信頼度S(t)を求め、時定数算出部24に出力する。時定数算出部24は時定数T(t)を補正位置算出部26に出力する。さらに、補正位置算出部26は、位置ベクトルP(t)と時定数T(t)を取得して補正されたユーザ位置P’(t)を出力する。
【選択図】図1
Description
第1の実施形態は、信頼度S(t)を瞬時の位置ベクトルP(t)と速度ベクトルV(t)との比較で決定するものである。以下、第1の実施形態について説明する。
次に、第2の実施形態における、積算した位置ベクトルP(t)と速度ベクトルV(t)との比較で信頼度S(t)を決定する処理について説明する。

次に、第3の実施形態における、記憶した平均データの中で過去のものよりも最新のものを重視する処理について説明する。
Claims (7)
- 移動体に搭載され、複数の衛星からの信号を受信する受信機と、受信した信号から測位に用いられるコード擬似距離及びキャリアのドップラー周波数などを検出して受信機の位置を求める測位手段と、を有する測位装置において、
衛星から受信機までの擬似距離を算出する擬似距離算出手段と、
複数の擬似距離から受信機の位置情報を算出する測位算出手段と、
キャリアのドップラー周波数から受信機の移動速度を算出する移動速度算出手段と、
算出された受信機の位置情報と移動速度の相関値を位置情報の信頼度として算出する測位信頼度算出手段と、
算出された信頼度と反比例関係となる時定数を、位置変化の時定数として算出する時定数算出手段と、
時定数算出手段からの時定数により、測位算出手段からの位置情報を補正する補正位置算出手段と、
を有することを特徴とする測位装置。 - 請求項1に記載の測位装置において、
測位信頼度算出手段は、
算出された受信機の位置情報と移動速度を用いて、一定距離毎に走行した位置と移動速度の軌跡から相関値を求め、位置情報の信頼度として算出することを特徴とする測位装置。 - 請求項1又は2に記載の測位装置において、
さらに、移動速度算出手段からの移動速度を積算して積算速度を算出する積算速度算出手段を有し、
積算速度算出手段は、時定数算出手段からの時定数により位置と積算速度との差分となるオフセットを平滑化することを特徴とする測位装置。 - 請求項1から3のいずれか1項に記載の測位装置において、
測位信頼度算出手段は、
移動体の運動状態を測定するセンサなどから得られた移動速度と、測位算出手段からの位置情報と、の相関値を位置情報の信頼度として算出することを特徴とする測位装置。 - 複数の衛星からの信号を受信機で受信し、受信した信号から測位に用いられるコード擬似距離及びキャリアのドップラー周波数などを検出して受信機の位置を求める測位方法において、
衛星から受信機までの擬似距離を算出する擬似距離算出工程と、
複数の擬似距離から受信機の位置情報を算出する測位算出工程と、
キャリアのドップラー周波数から受信機の移動速度を算出する移動速度算出工程と、
算出された受信機の位置情報と移動速度の相関値を位置情報の信頼度として算出する測位信頼度算出工程と、
算出された信頼度と反比例関係となる時定数を、位置変化の時定数として算出する時定数算出工程と、
時定数算出工程からの時定数により、測位算出工程からの位置情報を補正する補正位置算出工程と、
を含むことを特徴とする測位方法。 - 請求項5に記載の測位方法において、
測位信頼度算出工程は、
算出された受信機の位置情報と移動速度を用いて、一定距離毎に走行した位置と移動速度の軌跡から相関値を求め、位置情報の信頼度として算出することを特徴とする測位方法。 - 請求項5又は6に記載の測位方法において、
さらに、移動速度算出工程からの移動速度を積算して積算速度を算出する積算速度算出工程を有し、
積算速度算出工程は、時定数算出工程からの時定数により位置と積算速度との差分となるオフセットを平滑化することを特徴とする測位方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005193625A JP2007010554A (ja) | 2005-07-01 | 2005-07-01 | 測位装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005193625A JP2007010554A (ja) | 2005-07-01 | 2005-07-01 | 測位装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007010554A true JP2007010554A (ja) | 2007-01-18 |
Family
ID=37749259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005193625A Pending JP2007010554A (ja) | 2005-07-01 | 2005-07-01 | 測位装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007010554A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009128055A (ja) * | 2007-11-20 | 2009-06-11 | Furuno Electric Co Ltd | 異常衛星検知装置および測位装置 |
| JP2010145179A (ja) * | 2008-12-17 | 2010-07-01 | Toyota Motor Corp | Gnss受信装置及び測位方法 |
| JP2012127899A (ja) * | 2010-12-17 | 2012-07-05 | Isuzu Motors Ltd | 測位精度判定装置 |
| CN115951174A (zh) * | 2023-03-14 | 2023-04-11 | 湖南湘能电气自动化有限公司 | 基于电网异常可信区识别的行波测距网络校正方法及系统 |
| WO2023062782A1 (ja) * | 2021-10-14 | 2023-04-20 | パイオニア株式会社 | 情報処理装置、制御方法、プログラム及び記憶媒体 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07198821A (ja) * | 1994-01-06 | 1995-08-01 | Japan Radio Co Ltd | Gps受信機及びその測位方法 |
| JPH095417A (ja) * | 1995-06-22 | 1997-01-10 | Matsushita Electric Ind Co Ltd | Gps受信装置 |
| JP2000193733A (ja) * | 1998-12-25 | 2000-07-14 | Japan Radio Co Ltd | 測位装置及び測位方法 |
| JP2001124840A (ja) * | 1999-10-28 | 2001-05-11 | Matsushita Electric Ind Co Ltd | Gps受信機および測位方法 |
| JP2002323551A (ja) * | 2001-04-27 | 2002-11-08 | Fujitsu Ten Ltd | ナビゲーション装置 |
| JP2005077114A (ja) * | 2003-08-29 | 2005-03-24 | Pioneer Electronic Corp | マルチパス検出装置及び方法、ナビゲーション装置、並びにコンピュータプログラム |
| JP2006064593A (ja) * | 2004-08-27 | 2006-03-09 | Japan Radio Co Ltd | 測位装置 |
-
2005
- 2005-07-01 JP JP2005193625A patent/JP2007010554A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07198821A (ja) * | 1994-01-06 | 1995-08-01 | Japan Radio Co Ltd | Gps受信機及びその測位方法 |
| JPH095417A (ja) * | 1995-06-22 | 1997-01-10 | Matsushita Electric Ind Co Ltd | Gps受信装置 |
| JP2000193733A (ja) * | 1998-12-25 | 2000-07-14 | Japan Radio Co Ltd | 測位装置及び測位方法 |
| JP2001124840A (ja) * | 1999-10-28 | 2001-05-11 | Matsushita Electric Ind Co Ltd | Gps受信機および測位方法 |
| JP2002323551A (ja) * | 2001-04-27 | 2002-11-08 | Fujitsu Ten Ltd | ナビゲーション装置 |
| JP2005077114A (ja) * | 2003-08-29 | 2005-03-24 | Pioneer Electronic Corp | マルチパス検出装置及び方法、ナビゲーション装置、並びにコンピュータプログラム |
| JP2006064593A (ja) * | 2004-08-27 | 2006-03-09 | Japan Radio Co Ltd | 測位装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009128055A (ja) * | 2007-11-20 | 2009-06-11 | Furuno Electric Co Ltd | 異常衛星検知装置および測位装置 |
| JP2010145179A (ja) * | 2008-12-17 | 2010-07-01 | Toyota Motor Corp | Gnss受信装置及び測位方法 |
| JP2012127899A (ja) * | 2010-12-17 | 2012-07-05 | Isuzu Motors Ltd | 測位精度判定装置 |
| WO2023062782A1 (ja) * | 2021-10-14 | 2023-04-20 | パイオニア株式会社 | 情報処理装置、制御方法、プログラム及び記憶媒体 |
| CN115951174A (zh) * | 2023-03-14 | 2023-04-11 | 湖南湘能电气自动化有限公司 | 基于电网异常可信区识别的行波测距网络校正方法及系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11441907B2 (en) | Positioning device and positioning method | |
| EP2400270B1 (en) | Track information generating device, track information generating method, and computer-readable storage medium | |
| US7987047B2 (en) | Navigation equipment | |
| CN110914711B (zh) | 定位装置 | |
| US6574557B2 (en) | Positioning error range setting apparatus, method, and navigation apparatus | |
| WO2014002210A1 (ja) | 測位装置 | |
| US9423486B2 (en) | Position calculating method and position calculating device | |
| WO2014125754A1 (ja) | 車両軌跡算出方法 | |
| JP6413946B2 (ja) | 測位装置 | |
| WO2014125769A1 (ja) | 車両方位検出方法および車両方位検出装置 | |
| JP2005300167A (ja) | 衛星測位装置及びナビゲーション装置 | |
| JP4905054B2 (ja) | 移動体用衛星電波受信機 | |
| JPH0868651A (ja) | 車両用現在位置検出装置 | |
| EP1256813A2 (en) | Apparatus and method for navigation and positioning | |
| JP2017167053A (ja) | 車両位置決定装置 | |
| JP2007010554A (ja) | 測位装置 | |
| JP2008051572A (ja) | ナビゲーション装置及び、その方法、並びにそのプログラム | |
| JP2008051573A (ja) | ナビゲーション装置及び、その方法、並びにそのプログラム | |
| RU2202102C2 (ru) | Способ определения местоположения подвижных объектов и устройство для его реализации | |
| JP2010145178A (ja) | 移動体位置特定装置 | |
| JP2010112759A (ja) | 移動体位置測位装置 | |
| JP2007010550A (ja) | 測位装置及び測位方法 | |
| JP3827598B2 (ja) | 移動体位置計測システム | |
| JP2000180191A (ja) | ナビゲーション装置 | |
| JP2008180598A (ja) | 移動体位置測位装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080625 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101209 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20101214 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110705 |
|
| A02 | Decision of refusal |
Effective date: 20111206 Free format text: JAPANESE INTERMEDIATE CODE: A02 |