JP2006266909A - 磁気検出装置及びそれを用いた電子方位計 - Google Patents
磁気検出装置及びそれを用いた電子方位計 Download PDFInfo
- Publication number
- JP2006266909A JP2006266909A JP2005086292A JP2005086292A JP2006266909A JP 2006266909 A JP2006266909 A JP 2006266909A JP 2005086292 A JP2005086292 A JP 2005086292A JP 2005086292 A JP2005086292 A JP 2005086292A JP 2006266909 A JP2006266909 A JP 2006266909A
- Authority
- JP
- Japan
- Prior art keywords
- current
- magnetic
- magnetic field
- voltage
- coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C17/00—Compasses; Devices for ascertaining true or magnetic north for navigation or surveying purposes
- G01C17/02—Magnetic compasses
- G01C17/28—Electromagnetic compasses
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
Abstract
【課題】相対的に大きな外乱を有する環境下においても外部磁界の強さを求めることができる磁界検出装置及びそれを用いた電子方位計を提供すること。
【解決手段】コイル112に与える電流c及びその電流偏差xを設定する。電流c、電流c+x、電流c−xをそれぞれコイル112に与えて交流磁界を発生させてMR素子111に印加することにより、電圧V0−V2を検出する。振幅判定部14において、電圧検出部13で検出された電圧V0−V2を用いてMR素子111の検出範囲外であるかどうかを判断する。MR素子111の検出範囲外の場合には、振幅制御部17において、電流偏差xを大きくし、電流増幅部18において、振幅制御部17で設定し直した電流偏差を用いて電流をコイル112に与える。このようにしてMR素子111の傾きを検出する。
【選択図】図1
【解決手段】コイル112に与える電流c及びその電流偏差xを設定する。電流c、電流c+x、電流c−xをそれぞれコイル112に与えて交流磁界を発生させてMR素子111に印加することにより、電圧V0−V2を検出する。振幅判定部14において、電圧検出部13で検出された電圧V0−V2を用いてMR素子111の検出範囲外であるかどうかを判断する。MR素子111の検出範囲外の場合には、振幅制御部17において、電流偏差xを大きくし、電流増幅部18において、振幅制御部17で設定し直した電流偏差を用いて電流をコイル112に与える。このようにしてMR素子111の傾きを検出する。
【選択図】図1
Description
本発明は、磁気検出装置及びそれを用いた電子方位計に関する。
電子的に方位測定を行う場合には、地磁気などの外部磁界を検出する磁気センサを用いて行う。磁気センサを含む磁気検出回路を用いて方位を求める場合に、磁気センサに対して交流磁界を印加し、交流磁界を印加したときに磁気センサから出力される電圧を用いる技術が知られている。
この技術においては、磁界を印加すると内部抵抗が変化する磁気抵抗素子を含む磁気センサを用いる。この磁気抵抗素子は、図3に示すように、磁界に対して対称性のある抵抗変化を示す。地磁気のような外部磁界が加わると、図3の特性曲線において左右いずれかの方向にずれる。このとき、磁気抵抗素子の動作点は特性曲線の傾斜領域(リニア領域、例えばCの位置)にある。この磁気抵抗素子に交流磁界を重畳すると、磁気抵抗素子の特性を利用して抵抗値の変化を検出することができる。そして、この外部磁界をキャンセルする方向に電流を付与して図3のピークの位置に移動させることにより、外部磁界に対応する電流を測定することができる。この電流値から外部磁界の強さを求めることができる。
APPLICATION NOTE "Electronic Compass Design using KMZ51 and KMZ52", AN00022, Philips Semiconductors
しかしながら、上記技術においては、磁気抵抗素子に相対的に大きな外乱、例えば携帯電話におけるスピーカなどによる外乱が与えられると、すなわち、図3において大きく左右にずれた状態になると、磁気抵抗素子の動作点が特性曲線の平坦な部分となり、抵抗値の変化がない状態にずれる。この状態は、磁気抵抗素子の検出範囲外の状態であるが、磁気検出装置内では、外部磁界がキャンセルされて抵抗値の変化がないのか、検出範囲外で抵抗値の変化がないのかの判断をすることができない。このため、このような相対的に大きい外乱のある環境下では、上述のように外部磁界の強さを求めることができないという問題がある。
本発明はかかる点に鑑みてなされたものであり、相対的に大きな外乱を有する環境下においても外部磁界の強さを求めることができる磁界検出装置及びそれを用いた電子方位計を提供することを目的とする。
本発明の磁気検出装置は、抵抗値変化により磁気を検出する磁気センサと、前記磁気センサに交流磁界を印加する磁界発生手段と、印加された前記交流磁界に対応する出力電圧に基づいて前記磁気センサの検出範囲外であるかどうかを判定する判定手段と、前記磁気センサの検出範囲内でない場合に前記交流磁界の振幅を制御する振幅制御手段と、前記磁気センサに重畳された、検出対象である外部磁界をキャンセルする分の直流電流を前記磁界発生手段に供給する磁界キャンセル手段と、前記直流電流値から前記外部磁界の強度を求めて出力する出力手段と、を具備することを特徴とする。
この構成によれば、磁気センサの検出範囲外であるかどうかを判定し、磁気センサの検出範囲内でない場合に交流磁界の振幅を制御するので、すなわち磁気センサの特性曲線において傾きが検出できるようにフィードバック制御するので、磁気センサの特性である抵抗値の変化を利用することができる。したがって、相対的に大きい外乱を有する環境下であっても磁気検出を行うことが可能となる。
本発明の磁気検出装置においては、前記磁界発生手段はコイルを含み、前記コイルに電流を与えることにより前記磁気センサに交流磁界を印加し、前記振幅制御手段は前記コイルに与える電流の電流偏差を変えることにより前記交流磁界の振幅を制御することが好ましい。
本発明の磁気検出装置においては、前記判定手段は、特定電流を前記コイルに与えた際の第1の電圧、前記特定電流から電流偏差を減算した電流を前記コイルに与えた際の第2の電圧、及び前記特定電流に前記電流偏差を加算した電流を前記コイルに与えた際の第3の電圧を用いて判定を行うことが好ましい。この場合において、前記判定手段は、前記第1から第3の電圧が略等しい場合に前記磁気センサの検出範囲外であると判定することが好ましい。
この構成によれば、磁気センサの特性曲線における平坦領域である、すなわち検出範囲外であることを確実に判定することができる。このため、磁界キャンセルを意味する傾きのない状態と区別することができ、傾き検出のフィードバック制御に移行することが可能となる。
本発明の磁気検出装置においては、前記磁界キャンセル手段は、前記第1の電圧が前記第2及び第3の電圧よりも大きく、かつ、前記第2の電圧と前記第3の電圧が略等しい場合に磁界がキャンセルされたと判定することが好ましい。
この構成によれば、通常の磁気検出と異なり、特定電圧(動作点)である第1の電圧を用いた条件を採用しているので、確実に磁界キャンセルを意味する特性曲線におけるピークを判定することができる。このため、磁気センサの検出範囲外での傾きのない状態と区別することができる。
本発明の磁気検出装置においては、前記磁気センサは、磁界に対して対称性のある抵抗変化を示す磁気抵抗素子であることが好ましい。
本発明の磁気検出装置においては、前記磁気抵抗素子に所定の設定値の電流を与える定電流回路と、前記磁気抵抗素子の端子電圧が略一定となるように前記設定値を制御する電流設定値制御手段と、を具備することが好ましい。
この構成においては、端子電圧に基づいて電流設定値をフィードバック制御しているので、磁気抵抗素子の抵抗値のばらつきや温度変化の影響を小さくすることができる。このため、単一の磁気抵抗素子でも正確に磁気検出を行うことができる。その結果、磁気検出装置の構成を簡略化することができる。
本発明の磁気検出装置においては、前記磁気抵抗素子は、GIG素子又はMR素子であることが好ましい。
本発明の電子方位計は、上記複数の磁気検出装置と、前記複数の磁気検出装置により求められたそれぞれの出力値を用いて方位を求める方位算出手段と、を具備することを特徴とする。
この構成によれば、第1〜第3の電圧V0〜V2を用いてフィードバック制御を行って磁気センサの検出範囲外であるかどうかを判定し、磁気センサの検出範囲内でない場合に交流磁界の振幅をフィードバック制御する構成を有する磁気検出装置を備えているので、相対的に大きい外乱を有する環境下であっても方位を求めることが可能となる。
本発明によれば、印加された交流磁界に対応する出力電圧に基づいて磁気センサの検出範囲外であるかどうかを判定し、磁気センサの検出範囲内でない場合に交流磁界の振幅を制御するので、相対的に大きい外乱を有する環境下であっても磁気センサの特性である抵抗値の変化を利用することができ、磁気検出を行うことが可能となる。
以下、本発明の実施の形態について添付図面を参照して詳細に説明する。
(実施の形態1)
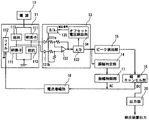
図1は、本発明の実施の形態1に係る磁気検出装置の概略構成を示すブロック図である。この磁気検出装置は、磁気を検出する磁気センサ11と、磁気センサ11に電源電圧を供給する電源12と、磁気センサ11に交流磁界が印加されたときに出力される電圧を検出する電圧検出部13と、磁気センサ11に印加された交流磁界に対応する電圧に基づいて磁気センサ11の検出範囲外であるかどうかを電圧の振幅により判定する振幅判定部14と、磁気センサ11に印加された交流磁界に対応する電圧に基づいて電圧のピークを検出するピーク検出部15と、磁気センサ11に加わった外部磁界をキャンセルする分の直流電流を磁界発生部に供給する磁界キャンセル部16と、振幅判定部14の判定結果に基づいて交流磁界の振幅を制御する振幅制御部17と、磁気センサ11に印加する交流磁界を発生させる電流を増幅する電流増幅部18と、磁界キャンセル分の直流電流値から外部磁界の強度を求めて出力する出力部20とから主に構成されている。
(実施の形態1)
図1は、本発明の実施の形態1に係る磁気検出装置の概略構成を示すブロック図である。この磁気検出装置は、磁気を検出する磁気センサ11と、磁気センサ11に電源電圧を供給する電源12と、磁気センサ11に交流磁界が印加されたときに出力される電圧を検出する電圧検出部13と、磁気センサ11に印加された交流磁界に対応する電圧に基づいて磁気センサ11の検出範囲外であるかどうかを電圧の振幅により判定する振幅判定部14と、磁気センサ11に印加された交流磁界に対応する電圧に基づいて電圧のピークを検出するピーク検出部15と、磁気センサ11に加わった外部磁界をキャンセルする分の直流電流を磁界発生部に供給する磁界キャンセル部16と、振幅判定部14の判定結果に基づいて交流磁界の振幅を制御する振幅制御部17と、磁気センサ11に印加する交流磁界を発生させる電流を増幅する電流増幅部18と、磁界キャンセル分の直流電流値から外部磁界の強度を求めて出力する出力部20とから主に構成されている。
磁気センサ11は、磁界に対して対称性のある抵抗変化を示す磁気抵抗素子であるMR(MagnetoResistance)素子111と、MR素子111に外部磁界を印加するコイル112とから構成されている。なお、磁気抵抗素子としては、MR素子111以外に、比較的地磁気をより感度良く検出することができるGIG(Granular In Gap)素子などを用いても良い。磁気センサ11においては、図1に示すように、2つのMR素子111がMR素子と同等の抵抗値の温度係数を持つ2つの抵抗113とブリッジ接続されている。このようなブリッジ接続することにより、MR素子111の抵抗値の温度変化をキャンセルすると共に電圧検出部13に出力する電圧を2倍にすることができる。
電源12は、電源電圧をMR素子111に印加する。電圧検出部13は、図3に示すように、交流磁界22が印加されたMR素子111の抵抗値の変化を電圧の形で取り出す。電圧検出部13は、バッファアンプ131a,131bと、差動増幅器132と、A/D変換部133と、オフセット電圧検出部134と、D/A変換部135とから構成されており、MR素子111間の電圧をバッファアンプ131a,131bでインピーダンス変換し、差動増幅器132で両者の差を求める。この差をA/D変換部133でディジタル信号に変換した後に、オフセット電圧検出部134でこの差(ブリッジにおけるアンバランス:オフセット電圧)に基づいて補正値を求め、D/A変換部135で補正電圧として差動増幅器132にフィードバックする。このような構成にすることにより、磁気センサ11におけるブリッジ接続によるアンバランスを修正することができる。
電圧検出部13で検出された電圧は、振幅判定部14及びピーク検出部15に送られる。また、この電圧検出部13では、特定電流cをコイル112に与えた際の第1の電圧(V0)、特定電流cから電流偏差xを減算した電流c−xをコイル112に与えた際の第2の電圧(V1)、及び特定電流cに電流偏差xを加算した電流c+xをコイル112に与えた際の第3の電圧(V2)を検出する。これらの第1〜第3の電圧は、振幅判定部14に送られる。
振幅判定部14は、磁気センサ11に印加された磁界に対応する電圧に基づいて磁気センサ11の検出範囲外であるかどうかを判定する。この振幅判定部14においては、図3に示すように、電圧検出部13で検出した第1〜第3の電圧(V0〜V2)を用いて判定を行う。従来の磁気検出装置のように図3に示す特性曲線の傾きを検出するのであれば、第2の電圧V2及び第3の電圧V3を得ることにより傾きを検出することができるが、MR素子111の検出範囲内にあるかどうかを判定するためには、第1の電圧V0を用いる必要がある。図3に示すように、特性曲線のピークPと平坦領域Xで特性曲線の傾きが0になっている。すなわち、磁界をキャンセルしたときに傾きが0になり、MR素子111の検出範囲外になったときにも傾きが0になる。このため、相対的に大きな外乱を有する環境下においては、磁界キャンセルできた、すなわち図3におけるピークPの状態であるのか、MR素子111の検出範囲外(平坦領域X)であるのかの判断をすることができない。したがって、上記のように、第1〜第3の電圧(V0〜V2)を用いてMR素子111の検出範囲内にあるかどうかの判定を行う。具体的には、振幅判定部14は、第1,第2,第3の電圧V0,V1,V2が略等しい場合、すなわち、V0≒V1≒V2である場合には、図3における平坦領域Xであるので、MR素子111の検出範囲外であると判定する。なお、この略等しいとは、互いの差が約1mV以下である場合も含む意味である。この判定結果は振幅制御部17に送られる。このような条件を用いることにより、MR素子111の特性曲線における平坦領域Xである、すなわち検出範囲外であることを確実に判定することができる。このため、磁界キャンセルを意味する傾きのない状態と区別することができ、傾き検出のフィードバック制御に移行することが可能となる。
ピーク検出部15は、電圧検出部13からの電圧に基づいて図3に示す特性曲線におけるピークPを検出する。磁界キャンセル部16は、磁気センサ11に加わった外部磁界をキャンセルする。外部磁界がキャンセルされた状態は、図3に示す特性曲線のピークPの位置にある状態である。このため、ピークPの位置を判定するために、上述したように、振幅判定部14において、電力検出部13で検出した第1〜第3の電圧(V0〜V2)を用いて振幅判定を行う。この場合、第1の電圧V0が第2の電圧V1,第3の電圧V2よりも大きく、かつ、第2の電圧V1と第3の電圧V2が略等しいこと、すなわちV0>V1,V2(式1)、V1≒V2(式2)が条件となる。なお、略等しいとは、約1mV以下の差を含む意味である。磁界キャンセルされていない状態の場合、すなわち上記2つの式1,2のいずれかを満たさない場合には、後述する電流増幅部18にV1−V2に比例した制御信号(DC成分)を送り、コイル112に与える電流cを制御する。このとき、電流cの制御とV1−V2の検出を繰り返し行って制御量を修正する。そして、磁界がキャンセルされたと判定したときに、外部磁界に対応した電流Cが検出されるので、この電流から外部磁界の強度を求めて、その強度を検出装置出力(外部磁界強度)として出力部20から出力する。このように、通常の磁気検出と異なり、特定電圧(動作点)である第1の電圧V0を用いた条件を採用することにより、確実に磁界キャンセルを意味する特性曲線におけるピークを判定することができる。このため、MR素子111の検出範囲外での傾きのない状態と区別することができる。
振幅制御部17は、振幅判定部14の判定結果に基づいて交流磁界の振幅を制御する。振幅判定部14によりMR素子111の検出範囲外と判定された場合には、MR素子111に印加する交流磁界の振幅を大きくして抵抗値の変化の傾きが検出できるようにする。その後、振幅を大きくした交流磁界で得られた電圧から再び振幅判定部14において判定を行う。なお、振幅を大きくする程度については特に制限はないが、一回の振幅拡大動作で、図3に示す特性曲線の反対側の象限(図3において右側の象限)にまで及ぶ程度に大きくすると電圧上昇を見落とす可能性が生じるので好ましくない。具体的には、検出状況を確認しながら順次コイル112に与える電流の電流偏差xを変えることにより交流磁界の振幅を制御する。
電流増幅部18は、MR素子111に印加する交流磁界を発生させる電流を増幅し、その電流をコイル112に与える。なお、電流増幅部18とコイル112とにより磁界発生手段を構成する。これにより、MR素子111に交流磁界を印加することができる。したがって、磁気抵抗素子の特性を利用して抵抗値の変化からその傾きを検出することが可能となる。なお、コイル112の巻き数を増加することにより、電源電流を小さくすることができ、回路の低消費電力化を実現することができる。また、電流増幅部18は、磁界キャンセル部16の判定結果に基づいて、磁界がキャンセルされていない場合には、コイル112に与える電流cを変える制御を行う。そして、新しく設定された電流による交流電界が印加されたMR素子111の電圧を用いて磁界がキャンセルされたかどうかを判定する。
次に、上記構成を有する磁気検出装置の動作について説明する。図2は、本発明の実施の形態1に係る磁気検出装置における検出動作を説明するフローチャートである。まず、コイル112に与える電流c=c0、その電流偏差(振幅)x=x0、及びループ回数N=0を設定する(ST11)。この設定値は、デフォルトとして設定されていても良く、必要に応じて入力できるようにしても良い。
次いで、ループ回数を1インクリメントして(ST12)、電流cをコイル112に与えて交流磁界を発生させてMR素子111に印加する。そして、電圧検出部13において、このときの抵抗値変化を電圧V0として検出する(ST13)。なお、MR素子111には電圧供給部12から電源電圧が印加されている。次いで、電流c−xをコイル112に与えて交流磁界を発生させてMR素子111に印加する。そして、電圧検出部13において、このときの抵抗値変化を電圧V1として検出する(ST14)。さらに、電流c+xをコイル112に与えて交流磁界を発生させてMR素子111に印加する。そして、電圧検出部13において、このときの抵抗値変化を電圧V2として検出する(ST15)。なお、ST13〜ST15については、この順序で検出する必要はなく、適宜順序を変えて検出を行っても良い。
次いで、振幅判定部14において、電圧検出部13で検出された上記第1〜第3の電圧V0,V1,V2を用いてMR素子111の検出範囲外であるかどうかを判断する。具体的には、次のような処理を行う。ここでは、電流偏差の最大値を8x0とした。xが8x0となるのはループ回数が4回目である。したがって、V0:V2の最大値からV0:V2の最小値を減算した電圧が1mV以下かどうかを判断し(ST16)、減算後の電圧が1mV未満であると、電流偏差が4x0以下かどうかを判断する(ST19)。減算後の電圧が1mV未満であって電流偏差が4x0以上であれば、図3における特性曲線の平坦部であると考えられるので、測定範囲外であると判断して(ST21)、処理を終了する。減算後の電圧が1mV未満であって電流偏差が4x0以下であれば、その旨の制御信号を振幅制御部17に送り、振幅制御部17において電流偏差を2倍にする(ST20)。その制御情報は電流増幅部18に送られ、電流増幅部18において修正後の電流偏差を用いて電流をコイル112に与える。そして、ループ回数を1インクリメントしてから(ST12)、電圧検出工程(ST13〜ST15)を行う。一方、減算後の電圧が1mV以上であれば、電流偏差xが初期値であるかどうか、すなわちx=x0であるかどうかを判断し(ST17)、初期値でなければ電流偏差xを半分にする(ST18)。このようなフィードバック制御を行って、MR素子111の特性曲線の傾きを検出する。なお、短時間で磁界をキャンセルして検出装置出力であるVoutを得るためには、コイル電流cの初期値c0として前回測定時のcの値を用いることが望ましい。また、磁気的外乱の変動が大きく電流値Cが収束せず、MR素子111の特性曲線のピークPを検出できない場合には、検出不能として制御を終了するようにしても良い。例えば、検出時間やループ回数を予め決めておき、その検出時間やループ回数を超えたときに制御を終了するようにする。
次いで、上記のようなフィードバック制御によりMR素子111の傾きが検出されたとき、MR素子111に重畳されている外部磁界をキャンセルする。このとき、磁界がキャンセルされたかどうかは、電圧検出部13で検出された第1〜第3の電圧V0,V1,V2を用いて判定する。すなわち、V0>V1,V2、V1≒V2を満たしているかどうかを判断する。具体的には、V1がV0より小さいかどうかを判断し(ST22)、V1がV0よりも小さければ、V2がV0より小さいかどうかを判断する(ST24)。なお、ST22とST24とはいずれを先に行っても良い。V1がV0以上であるときは、電流cを電流c−xとして(ST23)、ループ回数を1インクリメントしてから(ST12)、電圧検出工程(ST13〜ST15)を行う。また、V2がV0以上であるときは、電流cを電流c+xとして(ST25)、ループ回数を1インクリメントしてから(ST12)、電圧検出工程(ST13〜ST15)を行う。そして、V1がV0より小さく、V2がV0より小さいときには、ループ回数が10回以下であるかどうか判断する(ST26)。ループ回数が10回以下である場合には、V1とV2との間の差が1mV以下であるか、すなわちV1とV2とがほぼ等しいかどうかを判断する(ST27)。この条件を満たしている場合には、磁界がキャンセルされた時点での電流が外部磁界に対応する値であるので、(V2−V1)/(2V0−V1−V2)に比例した量でコイル電流cを調整して磁界キャンセルを行う。すなわち、磁気検出装置の出力電圧VOUT=ac(a:感度係数)を求める(ST28)。一方、V1とV2との間の差が1mV以下でない場合には、磁界キャンセル部16からの制御信号(DC成分)に基づいて電流増幅部18で電流cをc+{(V2−V1)/(2V0−V1−V2)}・bx(b:比例定数)に変更して(ST29)、ループ回数を1インクリメントしてから(ST12)、電圧検出工程(ST13〜ST15)を行う。そして、このフィードバック制御を磁界がキャンセルされるまで行い、上記と同様にして磁気検出装置の出力電圧を求める(ST28)。ループ回数が10回を超える場合には、上記の条件(V0>V1,V2、V1≒V2)を満たしているとして、磁気検出装置の出力電圧を求める(ST28)。なお、ループ回数や、電流偏差の変更割合、V2−V1の値などについては、本実施の形態に限定されずに適宜変更することが可能である。例えば、外部磁界の時間的な変動が小さい場合には、比例定数bを適切に設定することにより、V2−V1の値をループ1回毎に1/3程度に縮小することができる。
このように、本実施の形態に係る磁気検出装置においては、第1〜第3の電圧V0〜V2を用いてフィードバック制御を行ってMR素子111の検出範囲外であるかどうかを判定し、磁気センサの検出範囲内でない場合に交流磁界の振幅を制御するので、すなわち傾きが検出できるようにフィードバック制御するので、MR素子111の特性である抵抗値の変化を利用することができる。したがって、相対的に大きい外乱を有する環境下であっても磁気検出を行うことが可能となる。
また、本実施の形態に係る磁気検出の方法によれば、フィードバック制御により傾き検出を行い、上記式1,2により磁界キャンセルを判定するので、MR素子のような磁気抵抗素子の特性曲線においてピークが先鋭でない場合や、ピークが先鋭であっても検出範囲が狭い(高感度のもの)場合であっても、正確に外部磁界の検出を行うことができる。
(実施の形態2)
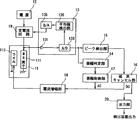
本実施の形態においては、MR素子111が単一の素子で構成されている場合について説明する。図4は、本発明の実施の形態2に係る磁気検出装置の概略構成を示すブロック図である。図4において、図1と同じ部分については図1と同じ符号を付してその詳細な説明は省略する。
本実施の形態においては、MR素子111が単一の素子で構成されている場合について説明する。図4は、本発明の実施の形態2に係る磁気検出装置の概略構成を示すブロック図である。図4において、図1と同じ部分については図1と同じ符号を付してその詳細な説明は省略する。
図4に示す磁気検出装置は、MR素子111に所定の電流を与える定電流回路19を備えている。また、この磁気検出装置においては、磁気センサ11が、単一のMR素子111と、コイル112とから構成されている。さらに、この磁気検出装置においては、電圧検出部13がバッファアンプ131と、A/D変換部133と、MR素子111の端子電圧に基づいて所定の電流が略一定なるように制御する電流設定値制御手段である平均値検出部136と、D/A変換部135とから構成されている。定電流回路19としては、低い電源電圧で高いインピーダンスが得られるCMOSアナログ回路であるカレントミラー回路などを用いることができる。
このような磁気検出装置においては、平均値検出部136において、オペアンプを用いたバッファ回路又は非反転増幅回路により、高いインピーダンスでMR素子111の端子電圧を検出する。そして、平均値検出部136は、端子電圧の平均値を求め、定電流回路19の電流設定値をフィードバック制御する。具体的には、MR素子111の抵抗値が高い場合には、磁気センサの検出動作に拘らず常時電流を流すように定電流回路19を制御する。これにより、浮遊容量の影響により、電流を流してから端子電圧が安定するまでの遅れ時間の影響を小さくすることができる。一方、MR素子111の抵抗値が低い場合には、磁気検出時のみ電流を流すように定電流回路19を制御する。この場合、定電流回路19の電流設定値は、前回の磁気検出の電流設定値を参照して適宜決定する。このような端子電圧に基づく電流設定値のフィードバック制御を行うことにより、MR素子111の抵抗値のばらつきや温度変化に伴うMR素子の抵抗値変化の、磁気検出装置の検出機能に対する影響を小さくすることができる。このため、単一のMR素子111でも正確に磁気検出を行うことができる。その結果、磁気検出装置の構成を簡略化することができる。また、MR素子111の抵抗値のばらつきが大きい場合や、抵抗値の経時又は温度変化が大きい場合においても、無調整で測定を行うことができる。
この構成においては、磁界発生手段である電流増幅部18及びコイル112の動作状態を監視する機構を設け、磁界発生手段が定電流状態に達した後に、電圧検出部13においてMR素子111の端子電圧を測定するようにしても良い。これにより、インダクタンスの大きいコイルを用いることによる電流上昇速度の遅れを補正することができる。
この磁気検出装置においても、コイル112に与える電流c及びその電流偏差xを設定し、電流c、電流c+x、電流c−xをそれぞれコイル112に与えて交流磁界を発生させてMR素子111に印加することにより、第1〜第3の電圧V0−V2を検出する。次いで、振幅判定部14において、電圧検出部13で検出された第1〜第3の電圧V0−V2を用いてMR素子111の検出範囲外であるかどうかを判断する。そして、MR素子111の検出範囲外の場合には、振幅制御部17において、電流偏差xを大きくし、電流増幅部18において、振幅制御部17で設定し直した電流偏差を用いて電流をコイル112に与える。このようにしてMR素子111の傾きを検出する。その後、磁界キャンセルをして外部磁界を求める。したがって、本実施の形態の磁気検出装置においても、MR素子111の特性である抵抗値の変化を利用することができる。このため、相対的に大きい外乱を有する環境下であっても磁気検出を行うことが可能となる。
上記実施の形態1,2における磁気検出装置において、アナログ検出方式で構成した場合には、時間的に連続した検出方式であるために、広い検出範囲が得られ、出力信号の応答性が高い。また、検出精度はコイル112の電流/磁気変換精度に依存し、MR素子111に依存しないので、検出感度の温度依存性が小さい。また、コイル112を定電流駆動することにより、周囲温度の変化によるコイルの抵抗値の変化や電源電圧の変化による誤差を低減することができる。一方、ディジタル検出方式で構成した場合には、間欠的な検出であるために、複数の検出方向のMR素子111において磁気検出回路を共用することができる。また、信号処理回路のD/A変換精度が検出精度を決定するため、A/D変換精度に依存しない。このため、小規模のA/D変換器を用いることができるので、装置の小型化及び低消費電力化を測ることができる。また、磁気検出回路自身がA/D変換機能を有するので、A/D変換前のアナログ回路に起因する誤差がない。
本実施の形態のように単一のMR素子を用いる場合には、出力電圧を大きくすることができる。すなわち、2つのMR素子を用いたブリッジ接続においては、MR素子に印加する電源電圧は1/2・Vddであるが、本実施の形態における単一のMR素子の磁気センサにおいては、Vddに近い電圧を印加することができる。これにより、同一の電源電圧でブリッジ接続されたMR素子を用いる場合よりも出力電圧を大きくすることができる。また、単一のMR素子を用いるので、磁気センサの占有面積を小さくすることができ、低消費電力化や回路の小型化を図ることができる。また、ブリッジ接続されたMRセンサで問題になるブリッジのアンバランス電圧の問題も発生しない。
(実施の形態3)
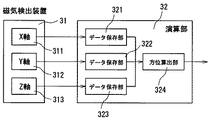
本実施の形態においては、上記実施の形態1,2の磁気検出装置を用いた電子方位計について説明する。図5は、本発明に係る磁気検出装置を用いた電子方位計の概略構成を示すブロック図である。
本実施の形態においては、上記実施の形態1,2の磁気検出装置を用いた電子方位計について説明する。図5は、本発明に係る磁気検出装置を用いた電子方位計の概略構成を示すブロック図である。
図5に示す電子方位計は、磁気検出装置31と、磁気検出装置31の出力電圧を用いて方位を算出する演算部32とから主に構成されている。磁気検出装置31は、それぞれ実施の形態1,2の構成を有するX軸用磁気検出回路311、Y軸用磁気検出回路312、Z軸用磁気検出回路313を有する。また、演算部32は、X軸用磁気検出回路311から出力された出力電圧を格納するデータ保存部321と、Y軸用磁気検出回路312から出力された出力電圧を格納するデータ保存部322と、Z軸用磁気検出回路313から出力された出力電圧を格納するデータ保存部323と、これらの出力電圧から方位を求める方位算出部324とから主に構成されている。
上記構成の電子方位計においては、まず、磁気検出装置31において、X軸、Y軸及びZ軸の磁気検出回路311〜313を用いて、上記実施の形態1,2にしたがって外部磁界を求める。その外部磁界に対応する出力電圧がそれぞれデータ保存部321〜323に格納される。その後、方位算出部324において、データ保存部321〜323に格納された出力電圧を用いて方位を算出する。すなわち、X軸用の出力電圧とY軸用の出力電圧の比に対して逆正接をとることにより方位を算出する。また、Z軸用の出力電圧は、電子方位の傾斜した状態を補正する演算において用いる。このように、本実施の形態の電子方位計は、第1〜第3の電圧V0〜V2を用いてフィードバック制御を行ってMR素子111の検出範囲外であるかどうかを判定し、磁気センサの検出範囲内でない場合に交流磁界の振幅をフィードバック制御する構成を有する磁気検出装置を備えているので、相対的に大きい外乱を有する環境下であっても方位を求めることが可能となる。
本実施の形態に係る電子方位計においては、各軸の出力電圧をデータ保存部321〜323に格納しておくので、各磁気検出回路311〜313において、新たに磁気検出を行う際に格納している出力電圧を用いることにより、フィードバック制御で収束させる時間が短くなり、検出時間を短縮することができる。その結果、電子方位計全体の消費電力の低減を図ることができる。
また、各磁気検出回路311〜313をCMOSアナログスイッチで切り替える場合には、実施の形態2のように各磁気検出回路に定電流回路と、電圧検出用のバッファ回路又は非反転増幅回路とを設けることにより、低インピーダンス化された信号の切り替えになるので、浮遊容量の増加により応答速度の低下やノイズ混入などを防止することができる。
本実施の形態の電子方位計においては、各磁気検出回路をアナログ検出方式で構成すると、各軸の磁気検出を連続的に行うので応答性が良い。また、各磁気検出回路をディジタル検出方式で構成すると、各軸の磁気検出回路を共用することができるので、小規模化を図ることができ、消費電力を低減することが可能となる。
本発明は上記実施の形態1〜3に限定されず、種々変更して実施することが可能である。例えば、上記実施の形態1,2における回路構成や処理手順などについては一例であり、本発明の目的の範囲を逸脱しない限りにおいて適宜変更して実施することが可能である。
11 磁気センサ
12 電源
13 電圧検出部
14 振幅判定部
15 ピーク検出部
16 磁界キャンセル部
17 振幅制御部
18 電流増幅部
19 定電流回路
20 出力部
31 磁気検出装置
32 演算部
111 MR素子
112 コイル
134 オフセット電圧検出部
136 平均値検出部
311〜313 磁気検出回路
321〜323 データ保存部
324 方位算出部
12 電源
13 電圧検出部
14 振幅判定部
15 ピーク検出部
16 磁界キャンセル部
17 振幅制御部
18 電流増幅部
19 定電流回路
20 出力部
31 磁気検出装置
32 演算部
111 MR素子
112 コイル
134 オフセット電圧検出部
136 平均値検出部
311〜313 磁気検出回路
321〜323 データ保存部
324 方位算出部
Claims (10)
- 抵抗値変化により磁気を検出する磁気センサと、前記磁気センサに交流磁界を印加する磁界発生手段と、印加された前記交流磁界に対応する出力電圧に基づいて前記磁気センサの検出範囲外であるかどうかを判定する判定手段と、前記磁気センサの検出範囲内でない場合に前記交流磁界の振幅を制御する振幅制御手段と、前記磁気センサに重畳された、検出対象である外部磁界をキャンセルする分の直流電流を前記磁界発生手段に供給する磁界キャンセル手段と、前記直流電流値から前記外部磁界の強度を求めて出力する出力手段と、を具備することを特徴とする磁気検出装置。
- 前記磁気発生手段はコイルを含み、前記コイルに電流を与えることにより前記磁気センサに交流磁界を印加し、前記振幅制御手段は前記コイルに与える電流の電流偏差を変えることにより前記交流磁界の振幅を制御することを特徴とする請求項1記載の磁気検出装置。
- 前記判定手段は、特定電流を前記コイルに与えた際の第1の電圧、前記特定電流から電流偏差を減算した電流を前記コイルに与えた際の第2の電圧、及び前記特定電流に前記電流偏差を加算した電流を前記コイルに与えた際の第3の電圧を用いて判定を行うことを特徴とする請求項2記載の磁気検出装置。
- 前記判定手段は、前記第1から第3の電圧が略等しい場合に前記磁気センサの検出範囲外であると判定することを特徴とする請求項3記載の磁気検出装置。
- 前記磁界キャンセル手段は、前記第1の電圧が前記第2及び第3の電圧よりも大きく、かつ、前記第2の電圧と前記第3の電圧が略等しい場合に磁界がキャンセルされたと判定することを特徴とする請求項3又は請求項4記載の磁気検出装置。
- 前記磁気センサは、磁界に対して対称性のある抵抗変化を示す磁気抵抗素子であることを特徴とする請求項1から請求項5のいずれかに記載の磁気検出装置。
- 前記磁気センサは、単一の磁気抵抗素子であることを特徴とする請求項1から請求項6のいずれかに記載の磁気検出装置。
- 前記磁気抵抗素子に所定の設定値の電流を与える定電流回路と、前記磁気抵抗素子の端子電圧が略一定となるように前記設定値を制御する電流設定値制御手段と、を具備することを特徴とする請求項7記載の磁気検出装置。
- 前記磁気抵抗素子は、GIG素子又はMR素子であることを特徴とする請求項5から請求項8のいずれかに記載の磁気検出装置。
- 請求項1から請求項9のいずれかに記載の複数の磁気検出装置と、前記複数の磁気検出装置により求められたそれぞれの出力値を用いて方位を求める方位算出手段と、を具備することを特徴とする電子方位計。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005086292A JP2006266909A (ja) | 2005-03-24 | 2005-03-24 | 磁気検出装置及びそれを用いた電子方位計 |
| EP06729389A EP1783507A4 (en) | 2005-03-24 | 2006-03-17 | MAGNETIC FIELD DETECTION DEVICE AND ELECTRONIC COMPASS THEREFOR |
| PCT/JP2006/305400 WO2006101050A1 (ja) | 2005-03-24 | 2006-03-17 | 磁気検出装置及びそれを用いた電子方位計 |
| CNA2006800006783A CN101006355A (zh) | 2005-03-24 | 2006-03-17 | 磁检测装置及使用了该装置的电子方位仪 |
| KR1020077003218A KR100852268B1 (ko) | 2005-03-24 | 2006-03-17 | 자기 검출장치 및 그것을 사용한 전자방위계 |
| US11/661,015 US20090115412A1 (en) | 2005-03-24 | 2006-03-17 | Magnetic sensing device and electronic compass using the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005086292A JP2006266909A (ja) | 2005-03-24 | 2005-03-24 | 磁気検出装置及びそれを用いた電子方位計 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006266909A true JP2006266909A (ja) | 2006-10-05 |
| JP2006266909A5 JP2006266909A5 (ja) | 2007-11-08 |
Family
ID=37023711
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005086292A Withdrawn JP2006266909A (ja) | 2005-03-24 | 2005-03-24 | 磁気検出装置及びそれを用いた電子方位計 |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP1783507A4 (ja) |
| JP (1) | JP2006266909A (ja) |
| KR (1) | KR100852268B1 (ja) |
| CN (1) | CN101006355A (ja) |
| WO (1) | WO2006101050A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011513730A (ja) * | 2008-02-27 | 2011-04-28 | アレグロ・マイクロシステムズ・インコーポレーテッド | 磁気センサのためのヒステリシスオフセット相殺 |
| JP5102409B1 (ja) * | 2012-04-10 | 2012-12-19 | 株式会社アイテス | 電子パネルの検査装置 |
| JP2016080363A (ja) * | 2014-10-09 | 2016-05-16 | 日置電機株式会社 | 測定装置および測定方法ならびにプログラム |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009101548A1 (en) * | 2008-02-12 | 2009-08-20 | Nxp B.V. | Signal conditioning circuit for magnetoresistive sensors |
| JP2011164027A (ja) * | 2010-02-12 | 2011-08-25 | Alps Green Devices Co Ltd | 電流センサ及び当該電流センサを備えたバッテリー |
| JP5586036B2 (ja) * | 2011-01-11 | 2014-09-10 | アルプス・グリーンデバイス株式会社 | 電流センサ |
| US9817078B2 (en) | 2012-05-10 | 2017-11-14 | Allegro Microsystems Llc | Methods and apparatus for magnetic sensor having integrated coil |
| US10725100B2 (en) * | 2013-03-15 | 2020-07-28 | Allegro Microsystems, Llc | Methods and apparatus for magnetic sensor having an externally accessible coil |
| JP2015219061A (ja) | 2014-05-15 | 2015-12-07 | Tdk株式会社 | 磁界検出センサ及びそれを用いた磁界検出装置 |
| WO2016056136A1 (ja) * | 2014-10-10 | 2016-04-14 | 日立金属株式会社 | 電流検出方法、電流検出装置、電流検出装置の信号補正方法、及び電流検出装置の信号補正装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57187671A (en) * | 1981-05-15 | 1982-11-18 | Nec Corp | Magnetism sensor |
| JPH01199179A (ja) * | 1988-02-04 | 1989-08-10 | Mitsubishi Electric Corp | 超伝導磁力計 |
| US5091697A (en) * | 1989-07-31 | 1992-02-25 | Ii Morrow, Inc. | Low power, high accuracy magnetometer and magnetic field strength measurement method |
| US5644851A (en) * | 1991-12-20 | 1997-07-08 | Blank; Rodney K. | Compensation system for electronic compass |
| JPH06174471A (ja) * | 1992-12-10 | 1994-06-24 | Casio Comput Co Ltd | 電子式方位計 |
| WO1997046892A2 (en) * | 1996-06-05 | 1997-12-11 | Regents Of The University Of Minnesota | Magnetoresistance sensor having minimal hysteresis problems |
| US6653831B2 (en) * | 2001-11-20 | 2003-11-25 | Gentex Corporation | Magnetometer having a dynamically adjustable bias setting and electronic vehicle compass incorporating the same |
-
2005
- 2005-03-24 JP JP2005086292A patent/JP2006266909A/ja not_active Withdrawn
-
2006
- 2006-03-17 CN CNA2006800006783A patent/CN101006355A/zh active Pending
- 2006-03-17 EP EP06729389A patent/EP1783507A4/en not_active Withdrawn
- 2006-03-17 WO PCT/JP2006/305400 patent/WO2006101050A1/ja active Application Filing
- 2006-03-17 KR KR1020077003218A patent/KR100852268B1/ko not_active IP Right Cessation
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011513730A (ja) * | 2008-02-27 | 2011-04-28 | アレグロ・マイクロシステムズ・インコーポレーテッド | 磁気センサのためのヒステリシスオフセット相殺 |
| KR101454680B1 (ko) | 2008-02-27 | 2014-10-27 | 알레그로 마이크로시스템스, 엘엘씨 | 자기 센서들의 히스테리시스 오프셋 제거 |
| JP2014209124A (ja) * | 2008-02-27 | 2014-11-06 | アレグロ・マイクロシステムズ・エルエルシー | 磁気センサのためのヒステリシスオフセット相殺 |
| US9046562B2 (en) | 2008-02-27 | 2015-06-02 | Allegro Microsystems, Llc | Hysteresis offset cancellation for magnetic sensors |
| JP5102409B1 (ja) * | 2012-04-10 | 2012-12-19 | 株式会社アイテス | 電子パネルの検査装置 |
| WO2013153615A1 (ja) * | 2012-04-10 | 2013-10-17 | 株式会社アイテス | 電子パネルの検査装置 |
| JP2016080363A (ja) * | 2014-10-09 | 2016-05-16 | 日置電機株式会社 | 測定装置および測定方法ならびにプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101006355A (zh) | 2007-07-25 |
| EP1783507A4 (en) | 2008-04-16 |
| KR20070083480A (ko) | 2007-08-24 |
| KR100852268B1 (ko) | 2008-08-14 |
| WO2006101050A1 (ja) | 2006-09-28 |
| EP1783507A1 (en) | 2007-05-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20090115412A1 (en) | Magnetic sensing device and electronic compass using the same | |
| JP2006266909A (ja) | 磁気検出装置及びそれを用いた電子方位計 | |
| US7923996B2 (en) | Magnetic field sensor with automatic sensitivity adjustment | |
| US9209794B2 (en) | Magnetic element control device, magnetic element control method and magnetic detection device | |
| US11199593B2 (en) | Magnetic sensor | |
| JP3847286B2 (ja) | 電磁コンパス用信号処理器 | |
| JP2007240202A (ja) | 磁気検出装置及びそれを用いた電子方位計 | |
| US11204374B2 (en) | Current sensor, and manufacturing method for current sensor | |
| US8847591B2 (en) | Current sensor | |
| JP5364816B1 (ja) | 磁気素子制御装置、磁気素子制御方法及び磁気検出装置 | |
| WO2010010811A1 (ja) | 地磁気センサ用制御装置 | |
| US20090012733A1 (en) | Offset correction program and electronic compass | |
| WO2012070337A1 (ja) | 電流センサ | |
| US11391792B2 (en) | Magnetic field measuring device, magnetic field measurement method, and recording medium having recorded thereon magnetic field measurement program | |
| CN104321662A (zh) | 磁元件控制装置、磁元件控制方法、以及磁检测装置 | |
| JP7119633B2 (ja) | 磁気センサ | |
| JP3318762B2 (ja) | 電子方位計 | |
| JP2006126183A (ja) | 磁気検出装置及びそれを用いた電子方位計 | |
| JP2009204305A (ja) | 地磁気検出プログラム及び電子コンパス | |
| JP7119695B2 (ja) | 磁気センサ | |
| US7498804B1 (en) | Resonance current sensing | |
| JP2021051046A (ja) | ゼロフラックス型磁気センサ及びそれを備える非接触電流計並びにゼロフラックス型磁気センサの制御回路及び制御方法 | |
| JP2022064636A (ja) | 磁気平衡式電流センサ | |
| JP3318763B2 (ja) | 電子方位計 | |
| Halim et al. | Current based sensor analog signal processing technique for extracting the feedback signal |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070926 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070926 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20090414 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20090916 |