JP2006220656A - ワークピースを光学的に検査するテストヘッド - Google Patents
ワークピースを光学的に検査するテストヘッド Download PDFInfo
- Publication number
- JP2006220656A JP2006220656A JP2006033046A JP2006033046A JP2006220656A JP 2006220656 A JP2006220656 A JP 2006220656A JP 2006033046 A JP2006033046 A JP 2006033046A JP 2006033046 A JP2006033046 A JP 2006033046A JP 2006220656 A JP2006220656 A JP 2006220656A
- Authority
- JP
- Japan
- Prior art keywords
- light
- workpiece
- detector
- head
- platter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/89—Investigating the presence of flaws or contamination in moving material, e.g. running paper or textiles
- G01N21/8901—Optical details; Scanning details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/9506—Optical discs
Landscapes
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- Health & Medical Sciences (AREA)
- Immunology (AREA)
- Physics & Mathematics (AREA)
- Pathology (AREA)
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Manufacturing Of Magnetic Record Carriers (AREA)
Abstract
【解決手段】ワークピースの上面及び下面を同時に光学的に検査するための装置は、上部及び下部テストヘッドを備え、各ヘッドは、ワークピースの関連表面を走査するレーザビームを発生するための少なくとも1つのレーザと、反射されたレーザ光を検出するための少なくとも1つの検出器とを備えている。レーザビームの方向は、上部テストヘッドと下部テストヘッドとの間のクロストーク干渉を減少又は防止するように選択される。
【選択図】図12
Description
1.ディスク状の基板(通常、Al合金)をラッピング又は研削する。
2.ニッケル燐合金のような材料を基板にメッキする。
3.メッキした基板を研磨し、テクスチャー処理する。(テクスチャー処理中に、通常、機械的な磨きにより基板にテクスチャーグルーブを形成して、その後に堆積される磁気層が非等方性を示すようにする。又、摩擦学的な理由で基板をレーザテクスチャー処理することも知られている。)
4.メッキされた基板上に、1つ以上の下層、1つ以上の磁気層及び1つ以上の保護オーバーコートを堆積する。(堆積プロセスは、スパッタリング又は他の技術を含むことができる。)製造中に基板に他の層を堆積することもできる。
5.ディスクに潤滑剤を塗布する。
本発明による装置は、ワークピースの第1面及び第2面を検査するための2つの光学的テストヘッドを備えている。この詳細な説明は、1つのテストヘッドを含む装置の説明から始める。その後に、2つのテストヘッドを含む装置、及びそれらの配列の仕方を説明する。
図2A及び2Bを参照すれば、レーザビーム16は、ダイオードレーザ14を去った後、スリットマスク50及び52を通過し、ミラー54で反射され、そして任意の光学要素56を通過する。この光学要素56は、ガラスプレート56aと、該プレート56aに装着された円偏光板56b(通常は1/4波長リターダ)と、一方の平面が偏光板56bに装着された円筒状レンズ56cとを備えている。(要素56は、構造体56a、56b及び56cが互いに固定されたもので構成されるが、他の実施形態では、それらを互いに固定する必要はない。構造体56a、56b及び56cは、図2Bにおいて別々に概略的に示されている。)
上述したように、一実施形態では、円筒状レンズ56cがレーザビーム16の入力光学路に設けられる。レンズ56cは、プラッター13における光スポットの形状の制御を容易にする。通常、レーザダイオードにより発生されるレーザビームは、アスペクト比が約3:1である。以下に述べるように、レーザビーム16は、通常、ある角度(例えば、約45°)でプラッター13に当たり、従って、レーザビーム16が何ら変更されない場合には、プラッター13におけるレーザスポット13は、そのアスペクト比が約2.1:1となる。レンズ56cは、ビーム16のアスペクト比を高める。一実施形態では、プラッター13におけるレーザスポットのアスペクト比は、2.5:1より大きく、例えば、4:1から5:1である。レーザスポットの長軸は、プラッター13とレーザビーム16との間の相対的へ並進移動の方向、即ち方向A1と実質的に平行である。このため、レーザビーム16が表面13uを走査するのに要する時間は、アスペクト比が4:1未満である場合より短くなる。(アスペクト比は、5:1以下に保持されるのが好ましい。というのは、アスペクト比が大き過ぎると、レーザビームのエネルギー密度が、表面13uを充分に検査するのに不充分になるからである。)
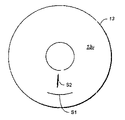
上述したように、任意であるが、レーザビーム16は、例えば、これをプレート56bに通すことにより円偏光される。ビーム16が円偏光された場合、種々の検出器からの出力信号は、表面13uにおけるスクラッチがレーザ光の電界成分に平行であるか垂直であるかに基づいて変化する。例えば、図4を参照すれば、表面13uの周囲方向に沿って延びるスクラッチS1は、表面13uの半径方向に沿って延びるスクラッチS2とは異なる作用をヘッド12に及ぼす。例えば、a)レーザビーム16が直線偏光され、b)入射平面が方位方向にあり、そしてc)偏光方向が半径方向である場合には、スクラッチS2よりスクラッチS1からの方が多くの光が散乱する(スクラッチが同じであると仮定すれば)。偏光方向が入射平面である場合には、スクラッチS1よりスクラッチS2からの方が多くの光が散乱する。(この技術で知られたように、入射平面とは、入射及び鏡面反射ビームにより定義される平面である。)円偏光ビーム16により、スクラッチの方向に対するこの敏感さの相違が排除される。
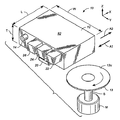
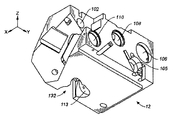
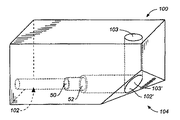
上述したように、ヘッド12は、ミラー、レンズ及び他の光学要素を備えている。種々の光学要素をヘッド12内に個々に整列させる必要性を回避してヘッド12を製造する方法を発見した。又、ヘッド12を非常にコンパクトな体積で設ける方法も発見した。例えば、巾W(図1A)が非常に小さくて、例えば、約5.9”であり、長さL及び厚みTが各々6.2”及び3.23”であるように、ヘッド12を構成することができた。(これらの寸法は、単なる例示に過ぎない。)これが効果的である理由は、ヘッド12のサイズが最小にされた場合に、ヘッド12の製造中に種々の装置に僅かな角度変化が生じても、ビーム光学路のずれにほとんど影響しないからである。又、ヘッド12を小さくするよう確保することで、装置10の「設置面積」を最小にすることができる。
本発明の一実施形態によれば、出力信号O20−O26にノイズを発生することのある漂遊光の量を最小限にするために多数の技術が使用される。(漂遊光は、多数の原因で生じ得る。例えば、ダイオードレーザは、主レーザビーム16の周りに「ハロー」をしばしば放出する。又、漂遊光は、ヘッド12内のレンズ、マスク又は他の要素の望ましからぬ反射からも生じ得る。)一実施形態では、黒いチューブを種々の開口に挿入して光学路の壁に当て、そこに生じる漂遊光を吸収する。チューブの表面は、電気メッキ技術により黒くされる。(一実施形態では、チューブ壁にニッケルが電気メッキされる。一形式の光吸収層が、ニューヨーク州ブロックリンのイプナー・テクノロジー・インクから入手できる。参考としてここに取り上げる2005年1月13日に出願された本出願人のプロビジョナル特許出願第60/643,748号のExhibitAとして提出したwww.epner.comからのページも参照されたい。)黒いチューブは、漂遊光を吸収するための「光トラップ」を構成する。
図6Aは、プラッター13、散乱光16−2、集光レンズ72、集中レンズ76及び検出器22を概略的に示す。(図示を容易にするために、ミラー74は図6Aから除去されている。)レンズ72と76との間の光が実質的にコリメートされる場合には、ヘッド12の動作に影響せずに光学距離D1を任意に長くすることができる。一実施形態では、両レンズ72及び76が使用されるが、別の実施形態では、単一のレンズ72’が光16−2を収集すると共に、光16−2を検出器22に集中もする(図6B)。同様に、光16−3を両レンズ77及び80に通さずに、単一のレンズを使用することもできる。同様に、光16−1’を両レンズ62及び68に通さずに、単一のレンズを使用することもできる。
A.プラッター上のレーザスポットの変位
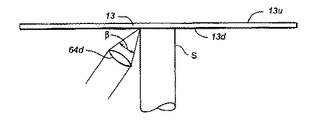
上述したように、一実施形態では、プラッター13の上面13uをテストするための単一テストヘッド12が設けられる。他の実施形態では、テストヘッド12がプラッター13の上面をテストする間にプラッター13の下面をテストするための第2のテストヘッド12dが設けられる(図7)。このような1つの実施形態では、ヘッド12dは、スピンドルSのためのスペースを設けるように若干変更される。更に、ヘッド12dにおけるレンズ62dの位置が、ヘッド12におけるレンズ62の位置に比して若干ずらされる。(ここで使用する文字「d」は、下部ヘッド12dの構造と、上部ヘッド12の対応する構造との間を区別するために要素の参照番号に追加される。更に、一実施形態では、上部レーザビーム16は、プラッター13の上面13uに沿って経路122(図8)をトレースする(即ち、プラッター13の半径方向に)が、下部レーザビーム16dは、このような半径方向経路から距離D4だけ変位された若干異なる経路122dをプラッター13の下面13dに沿ってトレースする。これは、スピンドルSの存在中で高い開口数(高い集光効率)をもつレンズ62dを使用できるようにするために行われる。(一実施形態において、距離D4は4.763mmであり、レンズ62dの直径及び後方焦点長さは、各々、25mm及び20.2mmであり、そして走査されるべき最小距離は、15.5mmである。レンズ62dの有効直径は、22mmである。レンズ62は、レンズ62dと同一である。これらの値は、単なる例示に過ぎない。)
一実施形態において、ヘッド12及び12dは、ヘッド12dに対するレーザビーム16の干渉を回避し又は最小限にすると共に、ヘッド12に対するレーザビーム16dの干渉を回避し又は最小限にするように構成される。これは、プラッター13に対するレーザビーム16及び16dの入射角を選択することにより達成できる。図12は、ヘッド12、12d及びプラッター13の並置を示す平面図である。又、図12は、a)プラッター13の移動方向A2、b)プラッター13の平面における入射レーザビーム16(ミラー54を去った後)及び鏡面反射レーザビーム16”(ミラー64に当たる前)の方向A3、及びc)プラッター13の平面における入射レーザビーム16d(ミラー54dを去った後)及び鏡面反射レーザビーム16”(ミラー64dに当たる前)の方向A4も示している。
一実施形態において、検出器20は、4つの領域20−1、20−2、20−3及び20−4を有する半導体デバイスのような4重検出器40である(図13)。レーザ光16の部分16−1”のスポット150が、上述したように、検出器20に当たる。レーザビーム16が表面13uの欠陥に当たると、欠陥壁の傾斜に基づいて、スポット150は、検出器20の中心Cから偏向される。スポット150が方向A5に偏向される場合には、領域20−2からの出力信号が、領域20−1、20−3及び20−4からの出力信号より大きくなる。表面13u上のビーム16がより急峻な欠陥に遭遇する場合には、スポット150が方向A5に更に移動し、領域20−2からの出力信号は、あまり急峻でない欠陥に遭遇した場合に得られるものより大きくなる。
回路C22、C24及びC26(検出器22−24の出力信号を処理するための)は、同一である。図15Aは、回路C22を示す。明らかなように、検出器22からの出力信号O22は、アナログ/デジタルコンバータ300に送られ、該コンバータは、その出力データをFIFOメモリ302に供給する。FIFOメモリ302の出力は、マイクロプロセッサ304により非同期で読み取ることができる。このようにして、マイクロプロセッサ304は、検出器22により送られた出力信号に対応するデータをFIFOメモリ302から読み取る。マイクロプロセッサ304は、これらのデータを、高速バスインターフェイス回路308及びバス310(一実施形態ではUSBバス)を経て、汎用プロセッサ306へ供給する。(プロセッサ306は、次いで、FIFOメモリ302からのデータに対して付加的な処理を遂行する。)一実施形態において、マイクロプロセッサ304は、シリコン・ラボラトリーズから入手できるモデルC8051F120のようなデバイスであり、100MHzのクロック速度を有している。しかしながら、他のマイクロプロセッサも使用できる。又、プロセッサ306は、通常、汎用プロセッサであるが、デジタル信号プロセッサ、例えば、150MIPSで動作できるテキサスインスツルーメンツTMS320F2812でもよい。
図16A及び16Bは、図15A及び15Bの構造を詳細に示している。図16A及び16Bにおいて、WRclk、Wren、WRPrt、RDclk、Rden及びRDPrtは、書き込みクロック、書き込みイネーブル、書き込みポート、読み取りクロック、読み取りイネーブル、及び読み取りポートを指す。カウンタ入力CIRは、カウンタ406及び410をリセットする。入力Dinは、カウンタ406及び410を増加する。信号SCLKは、クロック回路414から発生される。図16Cは、信号DEN及びAENを発生するのに使用できる書き込みイネーブルシーケンスロジック回路426を示す。この回路426は、アナログ/デジタルコンバータ300が、通常、クロック信号SCLKの多数のサイクルの限定パイプライン遅延を示すので、有用である。回路426は、このパイプライン遅延が与えられると、FIFOメモリの適切なロードを促進する。図16Cに示すように、一実施形態では、回路426は、信号DEN及びAENを発生する直列接続されたD型フリップーフロップ427のネットワークを備え、これら信号は、信号O22が、ある時間中に、スレッシュホールド信号THRを越えた場合だけアクティブになる。(上述したように、信号DENは、FIFOメモリ302へのデータの書き込みをイネーブルする。信号AENは、FIFOメモリ406及び410へのデータの書き込みをイネーブルする。)D型フリップ−フロップ427の各々は、クロック信号SCLKの関連パルス数だけ遅延された比較器316の出力信号を記憶する。回路426は、2つのゲート信号を発生し、その1つは、信号DENを発生するためのもので、もう1つは、信号AENを発生するためのものである。信号DEN及びAENのタイミングは、比較器316の出力信号、及び信号SCLKを構成するパルス列から発生される。特に、信号DEN及びAENは、フリップーフロップ427の選択された状態に基づく。(例えば、信号DENは、クロック信号SCLKの4つのパルスだけ遅延された比較器316の出力である。信号AENは、信号DENの立ち上り縁の1つのパルスと、信号DENが降下する直前の1つのパルスとを含む。)図16Cに示された回路は、単なる例示に過ぎない。
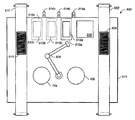
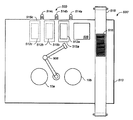
図17Aは、製造環境においてプラッターをテストするための「セル」500を概略的に示す。コンベア502は、検査されるべきプラッター13のカセット504を供給する。ロボットアーム506は、プラッター13をテスト装置10a又はテスト装置10bのいずれかに供給する。(両装置10a及び10bは、通常、プラッター13の両面をテストするための上部及び下部ヘッド12、12dを備えている。)テスト装置10aがプラッター13をテストした後に、アーム506は、プラッター13を把持し、そしてそれを不合格容器508、合格カセット510又は更に別の評価カセット512aのいずれかに入れる。(通常、大多数のプラッター、例えば、90%を越えるプラッターが、合格カセット510に入れられねばならない。)不合格容器508に蓄積されたプラッターは、必ずしも、プラッターが更に別の製造ステップを受ける場合に必要とされる配慮の度合いで取り扱われない。しかしながら、カセット510又は512aのプラッターは、通常、このような配慮で維持される。アーム506がプラッター13を装置10aからカセット510又は512a或いは容器508の1つに移動した後に、アーム506は、別のプラッター13をカセット504から取り出し、そして評価すべく装置10aに入れる。
12、12d:テストヘッド
13:ワークピース(プラッター)
13u:ワークピースの上面
13d:ワークピースの下面
14:レーザソース
16、16d:レーザビーム
20:偏向検出器
22:狭角度散乱検出器
24:広角度散乱検出器
26:後方散乱検出器
M:スピンドルモータ
S:スピンドル
A1、A2、A3、A4:方向
S1、S2:スクラッチ
50、52:スリットマスク
54:ミラー
56:光学要素
56a:ガラスプレート
56b:円偏光板
56c:円筒状レンズ
58:集束レンズ
62:集光レンズ
82:エンクロージャー
Claims (16)
- 平坦なワークピースの第1表面を検査するための第1光学的ヘッドであって、前記第1表面に向けて第1方向に第1光ビームを発生するための第1光源、及び前記第1表面から反射された光を検出するための第1検出器を含み、前記第1方向は前記第1表面に垂直ではないような第1光学的ヘッドと、
前記ワークピースの第2表面を検査するための第2光学的ヘッドであって、前記第2表面に向けて第2方向に第2光ビームを発生するための第2光源、及び前記第2表面から反射された光を検出するための第2検出器を含み、前記第2方向は前記第2表面に垂直ではないような第2光学的ヘッドと、
を備え、前記第1及び第2の光ビームの入射平面は、前記ワークピースが存在しない場合に、前記第1光ビームが前記第2検出器に向かって進行せず且つ前記第2光ビームが前記第1検出器に向かって進行しないという特性をもつようにした装置。 - 前記第1及び第2の光ビームの入射平面は、平行よりも逆平行に近いものである、請求項1に記載の装置。
- 前記ワークピースはプラッターであり、そして前記第1及び第2表面は同時に検査される、請求項1に記載の装置。
- 平坦なワークピースの第1表面を検査するための第1光学的ヘッドであって、前記第1表面に向けて第1方向に第1光ビームを発生するための第1光源、及び前記第1表面から反射された光を検出するための第1検出器を含み、前記第1方向は前記第1表面に垂直ではないような第1光学的ヘッドと、
前記ワークピースの第2表面を検査するための第2光学的ヘッドであって、前記第2表面に向けて第2方向に第2光ビームを発生するための第2光源、及び前記第2表面から反射された光を検出するための第2検出器を含み、前記第2方向は前記第2表面に垂直ではないような第2光学的ヘッドと、
を備え、前記第1及び第2の光ビームの入射平面は、前記ワークピースが存在しないとき、或いは前記第1及び第2の光ビームの一方又は両方が前記ワークピースの外縁に接近するときに、前記第1ヘッドと第2ヘッドとの間の光学的交配結合を減少又は排除する角度になるようにした装置。 - 前記角度は、前記第1光ビームが前記ワークピースの外縁に接近するときに、前記第1ビームからの光の量が物体で反射して前記第2検出器に到達するのを防止又は減少するものであり、更に、前記角度は、前記第2光ビームが前記ワークピースの外縁に接近するときに、前記第2ビームからの光の量が物体で反射して前記第1検出器に到達するのを防止又は減少するものである、請求項4に記載の装置。
- 前記第1検出器は、前記第1表面により散乱された光を受け取り、そして前記第2検出器は、前記第2表面により散乱された光を受け取る、請求項5に記載の装置。
- 前記第1ヘッドは、前記ワークピースの前記第1表面から反射された光を収集するための第1レンズ、及び前記収集した光を前記第1検出器に向けて反射するための第1ミラーを備え、そして前記第2ヘッドは、前記ワークピースの前記第2表面から反射された光を収集するための第2レンズ、及び前記収集した光を前記第2検出器に向けて反射するための第2ミラーを備えた、請求項5に記載の装置。
- 前記第1ヘッドは、更に、前記第1表面から反射された光を収集するための第1の複数のレンズ、及び前記収集した光を受け取るための第1の複数の検出器を備え、そして前記第2ヘッドは、更に、前記第2表面から反射された光を収集するための第2の複数のレンズ、及び前記収集した光を受け取るための第2の複数の検出器を備えた、請求項5に記載の装置。
- 前記ワークピースはプラッターである、請求項4に記載の装置。
- 第1光ビームを第1方向にワークピースの第1面に向けて供給して、前記第1ビームが前記第1面から反射して第1検出器に当たるようにするステップと、
第2光ビームを第2方向に前記ワークピースの第2面に向けて供給して、前記第2ビームが前記第2面から反射して第2検出器に当たるようにするステップと、
を備え、前記第1及び第2の光ビームの入射平面は、前記ワークピースが存在しない場合に、前記第1光ビームが前記第2検出器に向かって進行せず且つ前記第2光ビームが前記第1検出器に向かって進行しないという特性をもつようにした方法。 - 前記第1及び第2の光ビームの入射平面は、平行よりも逆平行に近いものである、請求項10に記載の方法。
- 前記ワークピースはプラッターである、請求項10に記載の方法。
- 第1光ビームを第1方向にワークピースの第1面に向けて供給して、前記第1ビームが前記第1面から反射して第1検出器に当たるようにするステップと、
第2光ビームを第2方向に前記ワークピースの第2面に向けて供給して、前記第2ビームが前記第2面から反射して第2検出器に当たるようにするステップと、
を備え、前記ワークピースが存在しないとき、或いは前記光ビームの一方又は両方が前記ワークピースの外縁に接近するときに、前記第1及び第2の光ビームの入射平面が、第1ヘッドと第2ヘッドとの間の光学的交配結合を減少又は排除する角度になるように、前記第1及び第2ヘッドを配列した方法。 - 前記角度は、前記第1ビームからの光の量が物体で反射して前記第2の検出器に向かい且つ前記第2ビームからの光の量が物体で反射して前記第1検出器に向かうのを防止又は減少するものである、請求項13に記載の方法。
- 前記第1検出器は、前記第1表面により散乱された光を受け取り、そして前記第2検出器は、前記第2表面により散乱された光を受け取る、請求項13に記載の方法。
- 前記ワークピースはプラッターである、請求項13に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US64374805P | 2005-01-13 | 2005-01-13 | |
| US11/112,536 US7305119B2 (en) | 2005-01-13 | 2005-04-22 | Test head for optically inspecting workpieces |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006220656A true JP2006220656A (ja) | 2006-08-24 |
| JP2006220656A5 JP2006220656A5 (ja) | 2009-04-09 |
Family
ID=36653298
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006033046A Pending JP2006220656A (ja) | 2005-01-13 | 2006-01-13 | ワークピースを光学的に検査するテストヘッド |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7305119B2 (ja) |
| JP (1) | JP2006220656A (ja) |
| MY (1) | MY147922A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011076669A (ja) * | 2009-09-30 | 2011-04-14 | Hitachi High-Technologies Corp | 磁気ディスクの両面欠陥検査方法及びその装置 |
Families Citing this family (68)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5117895B2 (ja) | 2008-03-17 | 2013-01-16 | ダブリュディ・メディア・シンガポール・プライベートリミテッド | 磁気記録媒体及びその製造方法 |
| JP2009238299A (ja) | 2008-03-26 | 2009-10-15 | Hoya Corp | 垂直磁気記録媒体および垂直磁気記録媒体の製造方法 |
| JP5453666B2 (ja) | 2008-03-30 | 2014-03-26 | ダブリュディ・メディア・シンガポール・プライベートリミテッド | 磁気ディスク及びその製造方法 |
| US9177586B2 (en) | 2008-09-30 | 2015-11-03 | WD Media (Singapore), LLC | Magnetic disk and manufacturing method thereof |
| US8877359B2 (en) | 2008-12-05 | 2014-11-04 | Wd Media (Singapore) Pte. Ltd. | Magnetic disk and method for manufacturing same |
| WO2010116908A1 (ja) | 2009-03-28 | 2010-10-14 | Hoya株式会社 | 磁気ディスク用潤滑剤化合物及び磁気ディスク |
| US8431258B2 (en) | 2009-03-30 | 2013-04-30 | Wd Media (Singapore) Pte. Ltd. | Perpendicular magnetic recording medium and method of manufacturing the same |
| US20100300884A1 (en) | 2009-05-26 | 2010-12-02 | Wd Media, Inc. | Electro-deposited passivation coatings for patterned media |
| US8496466B1 (en) | 2009-11-06 | 2013-07-30 | WD Media, LLC | Press system with interleaved embossing foil holders for nano-imprinting of recording media |
| US9330685B1 (en) | 2009-11-06 | 2016-05-03 | WD Media, LLC | Press system for nano-imprinting of recording media with a two step pressing method |
| JP5643516B2 (ja) | 2010-01-08 | 2014-12-17 | ダブリュディ・メディア・シンガポール・プライベートリミテッド | 垂直磁気記録媒体 |
| JP5574414B2 (ja) | 2010-03-29 | 2014-08-20 | ダブリュディ・メディア・シンガポール・プライベートリミテッド | 磁気ディスクの評価方法及び磁気ディスクの製造方法 |
| JP5645476B2 (ja) | 2010-05-21 | 2014-12-24 | ダブリュディ・メディア・シンガポール・プライベートリミテッド | 垂直磁気ディスク |
| JP5634749B2 (ja) | 2010-05-21 | 2014-12-03 | ダブリュディ・メディア・シンガポール・プライベートリミテッド | 垂直磁気ディスク |
| JP2011248969A (ja) | 2010-05-28 | 2011-12-08 | Wd Media (Singapore) Pte. Ltd | 垂直磁気ディスク |
| JP2011248967A (ja) | 2010-05-28 | 2011-12-08 | Wd Media (Singapore) Pte. Ltd | 垂直磁気ディスクの製造方法 |
| JP2011248968A (ja) | 2010-05-28 | 2011-12-08 | Wd Media (Singapore) Pte. Ltd | 垂直磁気ディスク |
| JP2012009086A (ja) | 2010-06-22 | 2012-01-12 | Wd Media (Singapore) Pte. Ltd | 垂直磁気記録媒体及びその製造方法 |
| US8889275B1 (en) | 2010-08-20 | 2014-11-18 | WD Media, LLC | Single layer small grain size FePT:C film for heat assisted magnetic recording media |
| JP2012133844A (ja) * | 2010-12-22 | 2012-07-12 | Sony Corp | 光ディスク記録方法及び光ディスク記録装置 |
| US8743666B1 (en) | 2011-03-08 | 2014-06-03 | Western Digital Technologies, Inc. | Energy assisted magnetic recording medium capable of suppressing high DC readback noise |
| US8711499B1 (en) | 2011-03-10 | 2014-04-29 | WD Media, LLC | Methods for measuring media performance associated with adjacent track interference |
| US8491800B1 (en) | 2011-03-25 | 2013-07-23 | WD Media, LLC | Manufacturing of hard masks for patterning magnetic media |
| US9028985B2 (en) | 2011-03-31 | 2015-05-12 | WD Media, LLC | Recording media with multiple exchange coupled magnetic layers |
| US8565050B1 (en) | 2011-12-20 | 2013-10-22 | WD Media, LLC | Heat assisted magnetic recording media having moment keeper layer |
| US9029308B1 (en) | 2012-03-28 | 2015-05-12 | WD Media, LLC | Low foam media cleaning detergent |
| US9269480B1 (en) | 2012-03-30 | 2016-02-23 | WD Media, LLC | Systems and methods for forming magnetic recording media with improved grain columnar growth for energy assisted magnetic recording |
| US8941950B2 (en) | 2012-05-23 | 2015-01-27 | WD Media, LLC | Underlayers for heat assisted magnetic recording (HAMR) media |
| US8993134B2 (en) | 2012-06-29 | 2015-03-31 | Western Digital Technologies, Inc. | Electrically conductive underlayer to grow FePt granular media with (001) texture on glass substrates |
| US9034492B1 (en) | 2013-01-11 | 2015-05-19 | WD Media, LLC | Systems and methods for controlling damping of magnetic media for heat assisted magnetic recording |
| US10115428B1 (en) | 2013-02-15 | 2018-10-30 | Wd Media, Inc. | HAMR media structure having an anisotropic thermal barrier layer |
| US9153268B1 (en) | 2013-02-19 | 2015-10-06 | WD Media, LLC | Lubricants comprising fluorinated graphene nanoribbons for magnetic recording media structure |
| US9183867B1 (en) | 2013-02-21 | 2015-11-10 | WD Media, LLC | Systems and methods for forming implanted capping layers in magnetic media for magnetic recording |
| US9196283B1 (en) | 2013-03-13 | 2015-11-24 | Western Digital (Fremont), Llc | Method for providing a magnetic recording transducer using a chemical buffer |
| US9190094B2 (en) | 2013-04-04 | 2015-11-17 | Western Digital (Fremont) | Perpendicular recording media with grain isolation initiation layer and exchange breaking layer for signal-to-noise ratio enhancement |
| US9093122B1 (en) | 2013-04-05 | 2015-07-28 | WD Media, LLC | Systems and methods for improving accuracy of test measurements involving aggressor tracks written to disks of hard disk drives |
| US8947987B1 (en) | 2013-05-03 | 2015-02-03 | WD Media, LLC | Systems and methods for providing capping layers for heat assisted magnetic recording media |
| US8867322B1 (en) | 2013-05-07 | 2014-10-21 | WD Media, LLC | Systems and methods for providing thermal barrier bilayers for heat assisted magnetic recording media |
| US9296082B1 (en) | 2013-06-11 | 2016-03-29 | WD Media, LLC | Disk buffing apparatus with abrasive tape loading pad having a vibration absorbing layer |
| US9406330B1 (en) | 2013-06-19 | 2016-08-02 | WD Media, LLC | Method for HDD disk defect source detection |
| US9607646B2 (en) | 2013-07-30 | 2017-03-28 | WD Media, LLC | Hard disk double lubrication layer |
| US9389135B2 (en) | 2013-09-26 | 2016-07-12 | WD Media, LLC | Systems and methods for calibrating a load cell of a disk burnishing machine |
| US9177585B1 (en) | 2013-10-23 | 2015-11-03 | WD Media, LLC | Magnetic media capable of improving magnetic properties and thermal management for heat-assisted magnetic recording |
| US9581510B1 (en) | 2013-12-16 | 2017-02-28 | Western Digital Technologies, Inc. | Sputter chamber pressure gauge with vibration absorber |
| US9382496B1 (en) | 2013-12-19 | 2016-07-05 | Western Digital Technologies, Inc. | Lubricants with high thermal stability for heat-assisted magnetic recording |
| US9824711B1 (en) | 2014-02-14 | 2017-11-21 | WD Media, LLC | Soft underlayer for heat assisted magnetic recording media |
| US9447368B1 (en) | 2014-02-18 | 2016-09-20 | WD Media, LLC | Detergent composition with low foam and high nickel solubility |
| US9431045B1 (en) | 2014-04-25 | 2016-08-30 | WD Media, LLC | Magnetic seed layer used with an unbalanced soft underlayer |
| US9042053B1 (en) | 2014-06-24 | 2015-05-26 | WD Media, LLC | Thermally stabilized perpendicular magnetic recording medium |
| US9159350B1 (en) | 2014-07-02 | 2015-10-13 | WD Media, LLC | High damping cap layer for magnetic recording media |
| US10054363B2 (en) | 2014-08-15 | 2018-08-21 | WD Media, LLC | Method and apparatus for cryogenic dynamic cooling |
| US9082447B1 (en) | 2014-09-22 | 2015-07-14 | WD Media, LLC | Determining storage media substrate material type |
| US8995078B1 (en) | 2014-09-25 | 2015-03-31 | WD Media, LLC | Method of testing a head for contamination |
| US9227324B1 (en) | 2014-09-25 | 2016-01-05 | WD Media, LLC | Mandrel for substrate transport system with notch |
| US9685184B1 (en) | 2014-09-25 | 2017-06-20 | WD Media, LLC | NiFeX-based seed layer for magnetic recording media |
| US9449633B1 (en) | 2014-11-06 | 2016-09-20 | WD Media, LLC | Smooth structures for heat-assisted magnetic recording media |
| US9818442B2 (en) | 2014-12-01 | 2017-11-14 | WD Media, LLC | Magnetic media having improved magnetic grain size distribution and intergranular segregation |
| US9401300B1 (en) | 2014-12-18 | 2016-07-26 | WD Media, LLC | Media substrate gripper including a plurality of snap-fit fingers |
| US9218850B1 (en) | 2014-12-23 | 2015-12-22 | WD Media, LLC | Exchange break layer for heat-assisted magnetic recording media |
| US9257134B1 (en) | 2014-12-24 | 2016-02-09 | Western Digital Technologies, Inc. | Allowing fast data zone switches on data storage devices |
| US9990940B1 (en) | 2014-12-30 | 2018-06-05 | WD Media, LLC | Seed structure for perpendicular magnetic recording media |
| US9280998B1 (en) | 2015-03-30 | 2016-03-08 | WD Media, LLC | Acidic post-sputter wash for magnetic recording media |
| US9275669B1 (en) | 2015-03-31 | 2016-03-01 | WD Media, LLC | TbFeCo in PMR media for SNR improvement |
| US9822441B2 (en) | 2015-03-31 | 2017-11-21 | WD Media, LLC | Iridium underlayer for heat assisted magnetic recording media |
| US11074934B1 (en) | 2015-09-25 | 2021-07-27 | Western Digital Technologies, Inc. | Heat assisted magnetic recording (HAMR) media with Curie temperature reduction layer |
| US10236026B1 (en) | 2015-11-06 | 2019-03-19 | WD Media, LLC | Thermal barrier layers and seed layers for control of thermal and structural properties of HAMR media |
| US9406329B1 (en) | 2015-11-30 | 2016-08-02 | WD Media, LLC | HAMR media structure with intermediate layer underlying a magnetic recording layer having multiple sublayers |
| US10121506B1 (en) | 2015-12-29 | 2018-11-06 | WD Media, LLC | Magnetic-recording medium including a carbon overcoat implanted with nitrogen and hydrogen |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53102792A (en) * | 1977-02-21 | 1978-09-07 | Hitachi Ltd | Simultaneous inspecting apparatus of inside and outside of body to be inspected |
| JPS56121150A (en) * | 1980-02-28 | 1981-09-22 | Hitachi Ltd | Instruction advance-taking system |
| JPH041955A (ja) * | 1990-04-18 | 1992-01-07 | Nec Corp | 光磁気ディスク装置 |
| JPH0461050A (ja) * | 1990-06-29 | 1992-02-27 | Toshiba Corp | 光磁気ディスク装置 |
| JPH04344349A (ja) * | 1991-05-21 | 1992-11-30 | Seiko Epson Corp | 光ディスク検査装置及び光磁気ディスクの初期化装置 |
| JPH04359109A (ja) * | 1991-06-04 | 1992-12-11 | Showa Alum Corp | 円板状ディスクワークの両面同時式外観検査装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4886975A (en) * | 1986-02-14 | 1989-12-12 | Canon Kabushiki Kaisha | Surface examining apparatus for detecting the presence of foreign particles on two or more surfaces |
| US4794265A (en) * | 1987-05-08 | 1988-12-27 | Qc Optics, Inc. | Surface pit detection system and method |
| US4794264A (en) * | 1987-05-08 | 1988-12-27 | Qc Optics, Inc. | Surface defect detection and confirmation system and method |
| JP3101290B2 (ja) * | 1989-03-15 | 2000-10-23 | キヤノン株式会社 | 表面状態検査装置、露光装置、及び表面状態検査方法 |
| JP2933736B2 (ja) * | 1991-02-28 | 1999-08-16 | キヤノン株式会社 | 表面状態検査装置 |
| JP3338561B2 (ja) * | 1994-08-26 | 2002-10-28 | 株式会社ソニー・ディスクテクノロジー | ディスク欠陥検査装置 |
| WO1997012226A1 (en) * | 1995-09-25 | 1997-04-03 | Tencor Instruments | Improved system for surface inspection |
| WO1997026529A1 (en) * | 1996-01-19 | 1997-07-24 | Phase Metrics | Surface inspection apparatus and method |
| US5719840A (en) * | 1996-12-30 | 1998-02-17 | Phase Metrics | Optical sensor with an elliptical illumination spot |
| US6624884B1 (en) * | 1997-04-28 | 2003-09-23 | International Business Machines Corporation | Surface inspection tool |
| US5847823A (en) * | 1997-04-28 | 1998-12-08 | International Business Machines Corporation | Surface inspection tool |
| US6566674B1 (en) * | 1999-06-21 | 2003-05-20 | Komag, Inc. | Method and apparatus for inspecting substrates |
| US6548821B1 (en) * | 1999-06-21 | 2003-04-15 | Komag, Inc. | Method and apparatus for inspecting substrates |
-
2005
- 2005-04-22 US US11/112,536 patent/US7305119B2/en not_active Expired - Fee Related
- 2005-12-14 MY MYPI20055872A patent/MY147922A/en unknown
-
2006
- 2006-01-13 JP JP2006033046A patent/JP2006220656A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53102792A (en) * | 1977-02-21 | 1978-09-07 | Hitachi Ltd | Simultaneous inspecting apparatus of inside and outside of body to be inspected |
| JPS56121150A (en) * | 1980-02-28 | 1981-09-22 | Hitachi Ltd | Instruction advance-taking system |
| JPH041955A (ja) * | 1990-04-18 | 1992-01-07 | Nec Corp | 光磁気ディスク装置 |
| JPH0461050A (ja) * | 1990-06-29 | 1992-02-27 | Toshiba Corp | 光磁気ディスク装置 |
| JPH04344349A (ja) * | 1991-05-21 | 1992-11-30 | Seiko Epson Corp | 光ディスク検査装置及び光磁気ディスクの初期化装置 |
| JPH04359109A (ja) * | 1991-06-04 | 1992-12-11 | Showa Alum Corp | 円板状ディスクワークの両面同時式外観検査装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011076669A (ja) * | 2009-09-30 | 2011-04-14 | Hitachi High-Technologies Corp | 磁気ディスクの両面欠陥検査方法及びその装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| MY147922A (en) | 2013-02-15 |
| US20060153440A1 (en) | 2006-07-13 |
| US7305119B2 (en) | 2007-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006220656A (ja) | ワークピースを光学的に検査するテストヘッド | |
| JP2006215040A (ja) | ワークピースを光学的に検査するための円偏光 | |
| JP2007147583A (ja) | ワークピースを光学的に検査するテストヘッド | |
| JP2006194900A (ja) | テストヘッドからプロセッサへデータを選択的に供給する方法及び装置 | |
| JP2006227006A (ja) | ワークピース上のレーザスポットを延長するためのレンズを備えた光学的ワークピース検査用テストヘッド | |
| JP2006194898A (ja) | 光学的テストヘッドの漂遊光を減少又は排除する方法及び装置 | |
| JP2006194899A (ja) | ワークピースを光学的に検査するテストヘッド | |
| JP2006221790A (ja) | ワークピースを光学的に検査するためのロボットシステム | |
| CN101171506B (zh) | 晶片边缘检测 | |
| JP3801635B2 (ja) | 製品表面の検査システムおよび方法 | |
| US5914495A (en) | Inspection apparatus for inspecting a defect of an optical disc | |
| US5625451A (en) | Methods and apparatus for characterizing a surface | |
| EP1156321A1 (en) | Method for checking a surface to be analysed and scanning surface-analyser | |
| JPS63153455A (ja) | 光デイスクテストシステム | |
| US20070263220A1 (en) | Optical Measurement System with Simultaneous Multiple Wavelengths, Multiple Angles of Incidence and Angles of Azimuth | |
| JP2012189587A (ja) | 不良検出システムの改良 | |
| TW589635B (en) | Optical disc device and tilt detecting method | |
| CN101165477A (zh) | 检测玻璃盘的圆周表面缺陷的光学系统及装置 | |
| JP5263783B2 (ja) | 光学特性測定装置及び測定方法 | |
| JPH05232035A (ja) | 空間フィルタと面構造をモニタするシステム | |
| US6688743B1 (en) | Method and apparatus to determine fly height of a recording head | |
| US10648928B1 (en) | Scattered radiation optical scanner | |
| US20240369470A1 (en) | Apparatus and method for grazing angle measurement | |
| KR20010041003A (ko) | 레코딩 헤드의 부양 높이를 결정하는 방법 및 장치 | |
| JP5282009B2 (ja) | 光学式磁気ディスク両面欠陥検査装置及びその方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090113 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110322 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110614 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110617 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110722 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110727 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110808 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120220 |