JP2006099155A - 衝突判定装置、および方法 - Google Patents
衝突判定装置、および方法 Download PDFInfo
- Publication number
- JP2006099155A JP2006099155A JP2004280806A JP2004280806A JP2006099155A JP 2006099155 A JP2006099155 A JP 2006099155A JP 2004280806 A JP2004280806 A JP 2004280806A JP 2004280806 A JP2004280806 A JP 2004280806A JP 2006099155 A JP2006099155 A JP 2006099155A
- Authority
- JP
- Japan
- Prior art keywords
- moving speed
- calculated
- vehicle
- area
- host vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Abstract
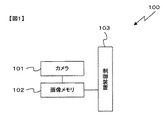
【解決手段】 カメラ101で撮像された撮像画像に基づいて、制御装置103は、縦エッジ、および横エッジの抽出処理を行ってオプティカルフローを算出する。オプティカルフロー上で横方向の移動速度成分に着目して一次対象領域を設定する。そして、一次対象領域に含まれる縦方向の移動速度成分に着目して一次対象領域に含まれる対象が自車両に到達するまでのTTCを算出し、TTC時間が閾値以下である一次対象領域を監視対象領域とする。監視対象領域に含まれる横方向の移動速度成分とTTC時間とに基づいて、監視対象領域を確定する。
【選択図】 図1
Description
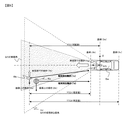
D=y/dy・dL=y/(dy/dt)・dL/dt=y/v・Vr・・・(1)
TTC=D/Vr=y/v・・・(2)
式(2)より、TTCは、一次対象領域内の任意の注目位置yと、その注目位置における縦方向の移動速度vによって算出される。したがって、図5に示した歩行者42のTTC0は次式(3)により算出され、並走車両43のTTC1は次式(4)により算出される。
TTC0=y0/v0・・・(3)
TTC1=y1/v1・・・(4)
(1)カメラ101で撮像した画像内に存在する対象の縦方向、および横方向の移動速度を算出してオプティカルフローを算出した。そして、横方向の移動速度成分に着目して一次対象領域を設定し、縦方向の移動速度成分に着目してTTCを算出し、横方向の移動速度とTTCとに基づいて、監視対象領域を特定することとした。これによって、1台のカメラで撮像した画像に基づいて自車両と衝突または接触する危険性のある対象を特定することができ、コスト的に有利となる。
(2)カメラ101で撮像した画像内に存在する対象の縦方向、および横方向の移動速度を算出してオプティカルフローを算出することとした。これによって、一般的なブロック間マッチングや濃度勾配法によるオプティカルフローの算出よりも簡易にオプティカルフローを算出することができる。
(4)実際に監視対象6bが衝突または接触する位置として車両の全長を考慮する場合には、TTCを補正してTTC1、およびTTC2を算出した。これによって、より精度の高い衝突危険性の判定を行うことができる。
なお、以下のように変形することもできる。
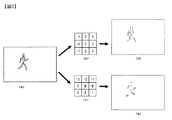
(1)上述した実施の形態では、オプティカルフローを算出するに当たって、連続するフレームに対して、縦方向のエッジを検出して、横方向に濃度勾配を有する部位を特徴として捕らえることにより、横方向の移動を検出した。また、横方向のエッジを検出して、縦方向に濃度勾配を有する部位を特徴として捕らえることにより、縦方向の移動を検出することとした。しかし、画像中に存在する任意の特徴点、あるいは領域を設定し、その特徴点あるいは領域が所定画素数移動する時間を観測することによって、特徴点あるいは領域の移動速度を算出して、算出した移動速度を縦方向と横方向に分解してもよい。これによって、さらに容易に画像中に存在する対象の横方向の移動速度、および縦方向の移動速度を算出することが可能となる。
101 カメラ
102 画像メモリ
103 制御装置
Claims (6)
- 自車両前方の画像を撮像する撮像手段と、
前記撮像手段によって撮像された画像内に存在する物体の画像空間内の縦方向、および横方向の移動速度を算出する移動速度算出手段と、
前記移動速度算出手段によって算出された横方向の移動速度に基づいて、自車両の側方から接近する物体を含む領域を設定する領域設定手段と、
前記移動速度算出手段によって算出された縦方向の移動速度に基づいて、前記領域設定手段で設定した領域が自車両に到達するまでの時間(到達時間)を算出する時間算出手段と、
前記移動速度算出手段によって算出された横方向の移動速度と、前記時間算出手段によって算出された到達時間とに基づいて、前記領域設定手段で設定した領域の中から、自車両と衝突または接触する危険性があると判定された物体を含む領域を監視対象領域として設定する監視対象領域設定手段とを備えることを特徴とする衝突判定装置。 - 請求項1に記載の衝突判定装置において、
前記監視対象領域設定手段は、前記移動速度算出手段によって算出された横方向の移動速度、および前記時間算出手段によって算出された到達時間に基づいて、前記領域設定手段で設定した領域に含まれる物体の前記到達時間後における横位置を算出し、当該到達時間後における横位置に基づいて、前記監視対象領域を設定することを特徴とする衝突判定装置。 - 請求項1または2に記載の衝突判定装置において、
前記移動速度算出手段は、
前記撮像手段によって連続して撮像された画像中に存在する任意の特徴点、あるいは領域が所定画素数移動する時間を観測することによって、特徴点あるいは領域の移動速度を算出し、算出した移動速度を縦方向と横方向に分解して画像中に存在する物体の横方向の移動速度、および縦方向の移動速度を算出することを特徴とする衝突判定装置。 - 請求項1〜3のいずれか一項に記載の衝突判定装置において、
前記撮像手段で撮像された画像に基づいて、自車両の車両挙動を計測する車両挙動計測手段をさらに有し、
前記移動速度算出手段は、前記車両挙動計測手段で計測された自車両の車両挙動に基づいて、算出した物体の縦方向、および横方向の移動速度を補正することを特徴とする衝突判定装置。 - 請求項1〜4のいずれか一項に記載の衝突判定装置において、
前記時間算出手段は、自車両の全長と車速とを加味して前記到達時間を補正し、自車両
前記監視対象領域設定手段は、前記移動速度算出手段によって算出された横方向の移動速度と、前記時間算出手段で補正された到達時間とに基づいて、前記監視対象領域を設定することを特徴とする衝突判定装置。 - 撮像された自車両前方の画像内に存在する物体の画像空間内の縦方向、および横方向の移動速度を算出し、
前記横方向の移動速度に基づいて、自車両の側方から接近する物体を含む領域を設定し、
前記縦方向の移動速度に基づいて、前記設定した領域が自車両に到達するまでの時間(到達時間)を算出し、
前記横方向の移動速度と、前記到達時間とに基づいて、前記設定した領域の中から、自車両と衝突または接触する危険性があると判定された物体を含む領域を監視対象領域として設定することを特徴とする衝突判定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004280806A JP4069919B2 (ja) | 2004-09-28 | 2004-09-28 | 衝突判定装置、および方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004280806A JP4069919B2 (ja) | 2004-09-28 | 2004-09-28 | 衝突判定装置、および方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006099155A true JP2006099155A (ja) | 2006-04-13 |
| JP4069919B2 JP4069919B2 (ja) | 2008-04-02 |
Family
ID=36238938
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004280806A Active JP4069919B2 (ja) | 2004-09-28 | 2004-09-28 | 衝突判定装置、および方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4069919B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007320024A (ja) * | 2006-06-01 | 2007-12-13 | Samsung Electronics Co Ltd | 移動ロボットの遠隔操縦のための衝突防止システム、装置及び方法 |
| JP2009042909A (ja) * | 2007-08-07 | 2009-02-26 | Sanyo Electric Co Ltd | 特徴点検出装置、およびそれを搭載した動画像処理装置 |
| WO2009099022A1 (ja) | 2008-02-04 | 2009-08-13 | Konica Minolta Holdings, Inc. | 周辺監視装置及び周辺監視方法 |
| JP2010038907A (ja) * | 2008-07-08 | 2010-02-18 | Nissan Motor Co Ltd | 物体検出装置及び物体検出方法 |
| WO2012005377A1 (ja) * | 2010-07-09 | 2012-01-12 | アイシン精機株式会社 | 衝突時間算出装置、衝突時間算出方法及びプログラム |
| US8718916B2 (en) | 2007-05-11 | 2014-05-06 | Toyota Jidosha Kabushiki Kaisha | Object detecting device, and object detecting method |
| DE102013112459A1 (de) | 2012-11-20 | 2014-05-22 | Denso Corporation | Vorrichtung und Verfahren zum Beurteilen einer Wahrscheinlichkeit einer Kollision zwischen einem Fahrzeug und einem Ziel, Fahrzeugkollisionsvermeidungssystem, und Verfahren zum Vermeiden einer Kollision zwischen einem Fahrzeug und einem Ziel |
| KR20180097398A (ko) * | 2017-02-23 | 2018-08-31 | 계명대학교 산학협력단 | 야간 주행 자동차를 위한 보행자 의도 예측 시스템 및 이를 이용한 방법 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101976390B1 (ko) * | 2012-10-19 | 2019-08-28 | 현대모비스 주식회사 | 차량용 사고 기록 장치 및 방법 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09226490A (ja) * | 1996-02-22 | 1997-09-02 | Nippon Soken Inc | 横断物の検出装置 |
| JPH09259282A (ja) * | 1996-03-26 | 1997-10-03 | Toshiba Corp | 移動障害物検出装置及びその方法 |
| JPH11353565A (ja) * | 1998-06-09 | 1999-12-24 | Yazaki Corp | 車両用衝突警報方法及び装置 |
| JP2001006096A (ja) * | 1999-06-23 | 2001-01-12 | Honda Motor Co Ltd | 車両の周辺監視装置 |
| JP2002029346A (ja) * | 2000-07-14 | 2002-01-29 | Hiroyuki Yokozawa | 自動車の運転支援システム及び運転支援プログラムを記録した記録媒体 |
| JP2003051016A (ja) * | 2001-05-11 | 2003-02-21 | Honda Motor Co Ltd | 接近検出装置、接近検出方法、及び接近検出プログラム |
| JP2004145479A (ja) * | 2002-10-22 | 2004-05-20 | Aisin Seiki Co Ltd | 周辺車両情報提供装置 |
| JP2004235711A (ja) * | 2003-01-28 | 2004-08-19 | Nissan Motor Co Ltd | 対象物追跡システムおよび対象物追跡方法 |
-
2004
- 2004-09-28 JP JP2004280806A patent/JP4069919B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09226490A (ja) * | 1996-02-22 | 1997-09-02 | Nippon Soken Inc | 横断物の検出装置 |
| JPH09259282A (ja) * | 1996-03-26 | 1997-10-03 | Toshiba Corp | 移動障害物検出装置及びその方法 |
| JPH11353565A (ja) * | 1998-06-09 | 1999-12-24 | Yazaki Corp | 車両用衝突警報方法及び装置 |
| JP2001006096A (ja) * | 1999-06-23 | 2001-01-12 | Honda Motor Co Ltd | 車両の周辺監視装置 |
| JP2002029346A (ja) * | 2000-07-14 | 2002-01-29 | Hiroyuki Yokozawa | 自動車の運転支援システム及び運転支援プログラムを記録した記録媒体 |
| JP2003051016A (ja) * | 2001-05-11 | 2003-02-21 | Honda Motor Co Ltd | 接近検出装置、接近検出方法、及び接近検出プログラム |
| JP2004145479A (ja) * | 2002-10-22 | 2004-05-20 | Aisin Seiki Co Ltd | 周辺車両情報提供装置 |
| JP2004235711A (ja) * | 2003-01-28 | 2004-08-19 | Nissan Motor Co Ltd | 対象物追跡システムおよび対象物追跡方法 |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012045706A (ja) * | 2006-06-01 | 2012-03-08 | Samsung Electronics Co Ltd | 移動ロボットの遠隔操縦のための衝突防止装置及び方法 |
| US7853372B2 (en) | 2006-06-01 | 2010-12-14 | Samsung Electronics Co., Ltd. | System, apparatus, and method of preventing collision of remote-controlled mobile robot |
| JP2007320024A (ja) * | 2006-06-01 | 2007-12-13 | Samsung Electronics Co Ltd | 移動ロボットの遠隔操縦のための衝突防止システム、装置及び方法 |
| US8718916B2 (en) | 2007-05-11 | 2014-05-06 | Toyota Jidosha Kabushiki Kaisha | Object detecting device, and object detecting method |
| JP2009042909A (ja) * | 2007-08-07 | 2009-02-26 | Sanyo Electric Co Ltd | 特徴点検出装置、およびそれを搭載した動画像処理装置 |
| WO2009099022A1 (ja) | 2008-02-04 | 2009-08-13 | Konica Minolta Holdings, Inc. | 周辺監視装置及び周辺監視方法 |
| JP2010038907A (ja) * | 2008-07-08 | 2010-02-18 | Nissan Motor Co Ltd | 物体検出装置及び物体検出方法 |
| JP2012018637A (ja) * | 2010-07-09 | 2012-01-26 | Aisin Seiki Co Ltd | 衝突時間算出装置、衝突時間算出方法及びプログラム |
| WO2012005377A1 (ja) * | 2010-07-09 | 2012-01-12 | アイシン精機株式会社 | 衝突時間算出装置、衝突時間算出方法及びプログラム |
| DE102013112459A1 (de) | 2012-11-20 | 2014-05-22 | Denso Corporation | Vorrichtung und Verfahren zum Beurteilen einer Wahrscheinlichkeit einer Kollision zwischen einem Fahrzeug und einem Ziel, Fahrzeugkollisionsvermeidungssystem, und Verfahren zum Vermeiden einer Kollision zwischen einem Fahrzeug und einem Ziel |
| US9372262B2 (en) | 2012-11-20 | 2016-06-21 | Denso Corporation | Device and method for judging likelihood of collision between vehicle and target, vehicle collision avoidance system, and method for avoiding collision between vehicle and target |
| DE102013112459B4 (de) | 2012-11-20 | 2018-09-20 | Denso Corporation | Vorrichtung und Verfahren zum Beurteilen einer Wahrscheinlichkeit einer Kollision zwischen einem Fahrzeug und einem Ziel, Fahrzeugkollisionsvermeidungssystem, und Verfahren zum Vermeiden einer Kollision zwischen einem Fahrzeug und einem Ziel |
| KR20180097398A (ko) * | 2017-02-23 | 2018-08-31 | 계명대학교 산학협력단 | 야간 주행 자동차를 위한 보행자 의도 예측 시스템 및 이를 이용한 방법 |
| KR101958868B1 (ko) * | 2017-02-23 | 2019-07-02 | 계명대학교 산학협력단 | 야간 주행 자동차를 위한 보행자 의도 예측 시스템 및 이를 이용한 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4069919B2 (ja) | 2008-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4544028B2 (ja) | 車載画像処理装置、および画像処理方法 | |
| JP4622001B2 (ja) | 道路区画線検出装置および道路区画線検出方法 | |
| US8594378B2 (en) | 3D object detecting apparatus and 3D object detecting method | |
| JP6458651B2 (ja) | 路面標示検出装置及び路面標示検出方法 | |
| US20120070088A1 (en) | Picture image processor, method for processing picture image and method for processing picture image | |
| JP2006338272A (ja) | 車両挙動検出装置、および車両挙動検出方法 | |
| JP2011065338A (ja) | 対象物追跡装置及びプログラム | |
| WO2014002692A1 (ja) | ステレオカメラ | |
| JP2010256995A (ja) | 物体認識装置 | |
| JP2008158640A (ja) | 移動物体検出装置 | |
| JP4069919B2 (ja) | 衝突判定装置、および方法 | |
| JP2009012521A (ja) | 車両の走行支援システム及び走行支援方法 | |
| JP5107154B2 (ja) | 運動推定装置 | |
| JP2020109560A (ja) | 信号機認識方法及び信号機認識装置 | |
| JP4321410B2 (ja) | 物体検出装置、および方法 | |
| JP2008160635A (ja) | カメラ状態検出方法 | |
| JP2006047091A (ja) | 移動体検出装置 | |
| JP2001357396A (ja) | 画像処理装置および画像認識装置 | |
| JP2006285910A (ja) | 車載物体検出装置、および物体検出方法 | |
| JP4144464B2 (ja) | 車載用距離算出装置 | |
| CN112513573B (zh) | 立体摄像机装置 | |
| JP4196211B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP5141275B2 (ja) | 車両用画像処理装置及び車両用画像処理方法 | |
| JP2008257399A (ja) | 画像処理装置 | |
| JP6564682B2 (ja) | 対象物検出装置、対象物検出方法、及び、対象物検出プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070628 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070703 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071002 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080107 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4069919 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110125 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120125 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130125 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130125 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140125 Year of fee payment: 6 |