JP2005502008A - 連続可変トランスミッションおよびその動作方法 - Google Patents
連続可変トランスミッションおよびその動作方法 Download PDFInfo
- Publication number
- JP2005502008A JP2005502008A JP2003525174A JP2003525174A JP2005502008A JP 2005502008 A JP2005502008 A JP 2005502008A JP 2003525174 A JP2003525174 A JP 2003525174A JP 2003525174 A JP2003525174 A JP 2003525174A JP 2005502008 A JP2005502008 A JP 2005502008A
- Authority
- JP
- Japan
- Prior art keywords
- clutch
- variator
- pressure
- transmission
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/1819—Propulsion control with control means using analogue circuits, relays or mechanical links
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/664—Friction gearings
- F16H61/6649—Friction gearings characterised by the means for controlling the torque transmitting capability of the gearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/02—Clutches
- B60W2710/025—Clutch slip, i.e. difference between input and output speeds
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/02—Clutches
- B60W2710/027—Clutch torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H2061/6604—Special control features generally applicable to continuously variable gearings
- F16H2061/6618—Protecting CVTs against overload by limiting clutch capacity, e.g. torque fuse
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/40—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism comprising signals other than signals for actuating the final output mechanisms
- F16H63/46—Signals to a clutch outside the gearbox
Abstract
Description
【0001】
本発明は、連続可変トランスミッション(CVT)およびその制御方法に関する。
【0002】
本発明は、自動車のトランスミッションに特に適用可能であるが、これに限定されるわけではない。
【背景技術】
【0003】
従来、CVTは何らかの形の伝達比可変ユニット(バリエータ)を用いて、所要の伝達比の連続変化を実現している。バリエータは、ギアと1つまたは複数のクラッチとを介してトランスミッションの入出力の間に結合される。本発明は、トロイダル・レース・ローリング・トラクション型のバリエータを用いたトランスミッションに関連して開発したものであるが、その他のタイプのバリエータに適用することもできる。
【0004】
バリエータでは、駆動力は、互いに係合させられている可動部品間の摩擦係合によって伝達される。したがって、例えば、トロイダル・レース・ローリング・トラクション型のバリエータでは、1つの回転ディスクから別のディスクへの駆動力の伝達は、これらのディスクの間に挟まれたローラによって、より一般的には1組のローラによって行われる。バイアス力を加えると(例えばディスクの一方を他方に向かって押すことによる。代わりにローラ自体をディスクに向かってバイアスすることもある)、ローラとディスクの間に圧力が生じ、それにより駆動力の伝達が可能となる。実際には、この場合にはローラとディスクとは「トラクション流体」の薄膜で隔てられており、必要な摩擦はこの膜の剪断力により生じる。
【0005】
バリエータが伝達することができるトルクは、特にバイアス力の関数として限定される。さらに、大きなトルクを扱うときには大きな力が必要となるが、このような大きなバイアス力を維持するとエネルギー効率が低下し、部品寿命も短くなるので、バイアス力は通常動作中に変化させる。
【0006】
バリエータの設計における長く認識されている要件の1つは、バイアス力と処理中のトルクとの間に不整合が生じないようにすることである。これは、バイアス力に関連して過度なトルク荷重がバリエータにかかると、バリエータの可動部品間で許容できないレベルの滑りが生じ、その結果としてバリエータに障害が生じる、またはバリエータが破損する恐れがあるからである。
【0007】
いわゆる「トルク制御式」バリエータは、バリエータのリアクション・トルクが自動的に調整されるので、この点に関していくつかの利点がある。「伝達比制御式」バリエータとトルク制御式バリエータとを比較してみると有効である。前者では、所要のバリエータ駆動比は一般に電子式コントローラによって決定され、制御信号が入力されると、バリエータがその所定の比を採用する。トルク制御式バリエータも制御信号を受信しなければならないが、この場合には、実際のバリエータ比は、制御信号のみによって決まるわけではない。その代わりに、このバリエータは、制御信号がバリエータに作用するトルクによって相殺される比率を自動的に採用する。したがって、制御信号は、所定の比率に対応するのではなく、バリエータのトルクの選択した差に対応する。
【0008】
図1に示すバリエータ10を参照してこの原理を説明する。このバリエータは、フル・トロイダル型バリエータであり、大まかな構造は当業者には周知である。2枚の入力ディスク12、14を、それらと共に回転する駆動軸に取り付ける。これらのディスクは、中央の出力ディスク26の対応する部分トロイダル表面22、24と向き合って一対のトロイダル空洞を形成する部分トロイダル表面18、20をそれぞれ有する。出力ディスクは、シャフト16とは無関係に回転できるようにジャーナル軸受になっている。シャフト16および入力ディスク12、14を介して入力されるエンジンその他の原動機からの駆動力は、トロイダル空洞内に配置された1組のローラを介して出力ディスクに伝達される。代表として1つのローラ28しか図示していないが、通常は、各空洞内にこのようなローラが3つ設けられる。ローラをディスクと係合させるための前述のバイアス力は、一方のディスク14に作用する油圧ピストン/シリンダ装置15によって両入力ディスク間に加えられる「端末荷重」の形で与えられる。各ローラは、それぞれのキャリッジ30にジャーナル軸受で支持される。キャリッジ自体は複動油圧アクチュエータ32に連結され、これにより制御並進力がローラ/キャリッジの組合せに加えられる。当業者には周知のように、ローラ/キャリッジの組合せは、バリエータの軸を中心とする円に沿った並進運動だけでなく、アクチュエータ32の位置によって決まるチルト軸の周りで回転して、ディスクに対するローラの「チルト角」を変化させ、それによりバリエータの駆動比を変化させることになる。このチルト軸は、精密にはラジアル平面内にはないことに留意されたい。むしろ、チルト軸はラジアル平面に対して角度をなしており、この角度を「キャスタ角」と呼ぶ。
【0009】
上記のように構成することにより、バリエータのトルクが制御される。アクチュエータ32は、調節可能な力をローラに加える。2枚のディスクもまた、それぞれローラに力を加える。平衡を保つためには、アクチュエータがローラの運動の接線方向に加える力が、ディスクからローラに加わるいわゆる「リアクション・フォース」と等しくなければならない。アクチュエータの力とリアクション・フォースとが等しくない場合には、この不均衡によってローラが円形経路に沿って移動してローラのチルト角が変化し、その結果バリエータ比が変化して、2つの力が再度釣り合う位置にローラが到達するので、この不均衡はすぐに打ち消される。従って、バリエータ比は、アクチュエータの力だけでなく、バリエータの両側のトルクによっても決まる。
【0010】
アクチュエータの力(すなわちリアクション・フォース)は、バリエータに出入りするトルクの合計に比例すると表現すると分かりやすい。より一般的にいえば、バリエータに加えられる制御信号(アクチュエータの力、またはアクチュエータ32内の2つの油圧の差)によって、バリエータに出入りするトルクの合計(「リアクション・トルク」)が決まる。
【0011】
アクチュエータ32は、図1aに示す油圧回路50に接続される。この油圧回路によって、アクチュエータ内の作動油の圧力を調節し、それに応じてリアクション・フォースを調節することができる。図示の例では、アクチュエータは複動型であり、反対向きに作用する2つの流体圧力を受ける。図1は、ピストンを1つ備えたアクチュエータを示している。図1aは若干異なり、対向する2つのピストン52、54をそれぞれのシリンダ56、58内に用いたアクチュエータ32を示している。ただし、アクチュエータの機能はいずれの場合も同様である。回路50では、一対の電子制御弁60、62を用いて、一対の流体ラインS1、S2のそれぞれにおいて背圧を発生させる。流体ラインS1、S2には、それぞれのポンプ64、66によって一定の流体流が供給される。これらの弁を調節することにより、ライン内の背圧が調節され、これによりリアクション・フォースが調節される。2本のラインの圧力差によってリアクション・フォースが決まるので、この圧力差が前述のバリエータへの制御信号となる。「高圧ウィンズ弁」を用いて2本のラインのうち高圧のラインをライン70を介して端末荷重装置15に接続すると、リアクション・フォースに概ね合わせて端末荷重を変化させることができる。
【0012】
したがって、定常状態では、制御信号(油圧)は弁の状態によって決まる。ただし、バリエータのトルクの釣り合いが変化してバリエータ比が変化した場合には、油圧およびリアクション・フォースは修正される。例えば、運転者が車両を制動すると、トランスミッションの出力のトルクに変化が生じ、バリエータ比と、それに対応するローラ28およびそれらのアクチュエータ32の運動とを変化させることが必要になる。流体は、アクチュエータの一方の側に流入し、他方の側から流出しなければならない。この流れ自体が、所要のローラ運動に対抗する油圧回路内の圧力変化を生じさせる。すなわち、制御信号はバリエータの影響を受ける。その効果は、ローラの運動をある程度減衰させるものであり、ほとんどの動作条件下では有利であり、振動に対するバリエータの安定性に寄与する。実際には、くびれまたは「オリフィス」を回路に組み込んで、流体流を制限することによってこの減衰効果を増大させることもできる。
【0013】
しかし、トルクの釣り合いの変化がきわめて急激である場合には、例えば車両を緊急停止した場合には、問題が生じることもある。トランスミッション出力のきわめて急激な減速には、それに応じた伝達比の急速な変化によって対応する必要があるが、油圧回路内の背圧は、所要のローラ運動に抵抗するものであり、十分な速度でバリエータを調節することができなくする可能性がある。その結果として、大きな過渡的なトルク荷重(「トルク・スパイク」)がバリエータにかかることがある。この状態では、バリエータのリアクション・トルクは、依然としてアクチュエータ32の油圧に密接に従う。しかし、この状態では、これらの油圧は、油圧回路のバルブ設定だけでなくバリエータ比の変化速度によっても決まる。ラインS1/S2の両端間の圧力差が急激に大きくなると、それに応じて大きなバリエータのリアクション・トルクが生じる。
【発明の開示】
【発明が解決しようとする課題】
【0014】
トルク・スパイクの1つの危険性は、バリエータのバイアス力(端末荷重)の過渡応答が増大したトルクと一致しない場合には、バリエータの過度な滑りによってバリエータに障害が生じる可能性があることである。バリエータの滑りが回避されても、バリエータ比の変化速度が不十分であれば、緊急停止中にエンジン速度が低下することになり、その結果として場合によってはエンジンが停止することになる。
【0015】
こうした難点は、急制動を行った場合にだけ見られるわけではない。例えば、最初は凍結した路面に静止している車両を加速してタールマカダム舗装面に移動させる場合を考えてみる。これは凍結した補助道路が舗装した主要道路に合流する場合に見られる。車両を加速するには、ローラ28を適切な方向にバイアスするようにバリエータ回路の各バルブを設定し、ホイールにトルクを加えて氷の上で回転させる。車両のホイールで必要とされるトルクは低く、それに応じて伝達比は高い。しかし、車両の被動ホイールがタールマカダム面と接触してグリップが強くなると、ホイールの速度は大幅に低下する。より大きなホイール・トルクとより低い伝達比が必要になり、この調節が急速に必要となる。しかし、バルブの設定は、正のホイール・トルクが必要であるという要件に基づくものであり、この調節を行うのに必要なバリエータ・ローラ28の運動には対抗するものであり、この状態は、バリエータ内の滑りにつながる可能性がある。
【0016】
バリエータの応答時間の問題およびバイアス力(端末荷重)をバリエータ・リアクション・トルクと一致させる問題は、低温でバリエータの作動油の粘度が上昇することにより顕著になる。自動車は、きわめて寒い条件下でも一応は動作しなければならない。既知のバリエータの設計では、油圧系にもローラ/ディスク境界におけるトルク伝達にも同じ「トラクション流体」を使用する。既知のトラクション流体は、低温で著しい粘度の上昇を示す。これにより、バリエータ比の変化によって油圧系内で生じる背圧が上昇する(さらにそれによりバリエータの応答が遅くなる)可能性があり、また、リアクション・トルクの変化とそれに応じたバイアス力(端末荷重)の調節との間の遅延が増大する可能性もある。
【0017】
現在のところ、トランスミッションの1つまたは複数のクラッチを適切に制御することによって上記の問題の1つまたは複数に対処することができることが分かっている。
【課題を解決するための手段】
【0018】
本発明の第1の態様によれば、トランスミッション入力と、トランスミッション出力と、少なくとも1つのクラッチを介してトランスミッションの入出力の間に結合され、それにより連続可変伝達比で入力と出力の間で駆動力を伝達するように配置された連続可変比率ユニット(バリエータ)とを含む連続可変トランスミッションであって、該バリエータが油圧制御回路に接続され、したがってその制御回路による調節が可能でありかつバリエータ比の変化の影響も受ける油圧制御圧力を受け、バリエータが、制御圧力に対応するバリエータ・リアクション・トルクを提供するようにその比を調節するように構成および配置され、トランスミッションが、バリエータに加えられるトルク荷重を制御することによってクラッチが制御圧力とリアクション・トルクとに影響を及ぼすように、クラッチが係合しているときにクラッチのトルク容量を調節する手段をさらに含む、連続可変トランスミッションが提供される。
【0019】
クラッチの制御は、クラッチが係合しているが滑ってはいないときに有効である。
【0020】
「クラッチ」という用語は、この文脈では、摩擦係合を介してバリエータを駆動可能にトランスミッション出力に結合する任意の装置を指す。例えば、ギア列の何らかの要素に取り付けたブレーキがこの機能を担う本発明を実施する装置を思いつく可能性もあるが、このような装置も本発明の範囲内である。しかし、代表的な実施形態では、回転板が交互に配置され、これらの回転板を合わせたときにそれらの間でトルクが伝達される従来のクラッチを利用する。
【0021】
このトランスミッションは、トルク要求量に応じてクラッチのトルク容量を設定する制御エレクトロニクスを備えることが好ましい。クラッチのトルク容量は、通常は、特定の付加的な変数によって決まる。
【0022】
トランスミッションのトルク要求量は、従来なら加速ペダルである運転者が操作する制御に基づいて決定されることが好ましい。
【0023】
制御エレクトロニクスは、バリエータ比を監視する手段に接続され、クラッチのトルク容量を設定する際にバリエータ比をさらに考慮に入れることが好ましい。
【0024】
好ましい実施態様では、トランスミッションは、少なくとも2つの異なるレジームで動作することができ、その際、制御エレクトロニクスは、クラッチのトルク容量を設定する際に伝達レジームをさらに考慮に入れる。
【0025】
別の好ましい実施態様では、制御エレクトロニクスは、クラッチのトルク容量を、トランスミッションから要求されたトルクを伝達するのに必要なレベルを選択したマージン分だけ超えるレベルに設定する制御モードを提供する。
【0026】
別の好ましい実施形態では、トランスミッションは、所望の制御圧力を確立し、それに応じて制御回路を設定する制御エレクトロニクスを含み、この制御エレクトロニクスは、バリエータ荷重の変化による制御圧力の所望レベルからの偏移がクラッチの滑りによって抑制されるようにクラッチを調節する働きもする。
【0027】
このエレクトロニクスは、制御プロファイルに沿って制御圧力を所望レベルに戻すようにクラッチを制御することが好ましい。
【0028】
本発明の第2の態様によれば、トランスミッション入力と、トランスミッション出力と、少なくとも1つのクラッチを介してトランスミッションの入出力の間に結合され、それにより連続可変伝達比で入力と出力の間で駆動力を伝達するように配置された連続可変比率ユニット(バリエータ)とを含み、該バリエータが油圧制御回路に接続され、該制御回路からの制御圧力に対応するバリエータ・リアクション・トルクを提供するようにその比を調節するように構成かつ配置された連続可変トランスミッションを動作させる方法であって、該制御回路を制御して、バリエータ比の変化の影響を受ける調節可能な油圧制御圧力をバリエータに加えるステップと、バリエータに加えられるトルク荷重を制御することによって、クラッチが係合している間に、クラッチが制御圧力とリアクション・トルクとに影響を及ぼすようにクラッチのトルク容量を調節するステップとを含む方法が提供される。
【0029】
本発明のさらに別の態様は、特にいわゆる多レジーム型のトランスミッションにおける所要のクラッチ制御の実装に関する。
【0030】
2つ以上の異なるレジームで動作可能なCVTにバリエータを組み込むことにより、バリエータ自体によって得られる範囲より大きな伝達比範囲を実現することことは周知である。単なる一例であるが、バリエータの出力がエピサイクリック・ミキサに導かれてそこで調整される低レジーム、およびバリエータの出力が一定伝達比のギア列を介してトランスミッションの出力シャフトに導かれる高レジームを有するトランスミッションを記載する国際特許出願PCT/GB97/00938号を参照されたい。
【0031】
このようなトランスミッションでは、車両が静止しているときにバリエータをホイールから切り離す必要がない。その代わりに、エピサイクリック・ミキサを使用して、トランスミッションの入力とバリエータが回転してもその出力と車両のホイールが静止している「ギヤ・ニュートラル」状態を形成する。前述の1つまたは複数のクラッチの機能は、1つのレジームまたは別のレジームを結びつけ、それらの間の切換を行うことである。レジームの切換を滑らかにかつ機械的衝撃を生じることなく行うことが重要である。当技術分野では周知のように、必要とされる滑らかな切換は、クラッチの要素(例えば、従来型のクラッチでは交互配置されたクラッチ板)が相対的に移動していないときにクラッチ状態を変化させることによって実現することができる。これは同期レジーム変化と呼ばれる。必要とされるクラッチの同期運動は短い時間しか起きないので、滑らかな変化を行うには、クラッチの状態の正確なタイミングと制御が必要である。好ましい手法は、高圧の作動油をクラッチに当てることによって急速にクラッチを係合させることである。
【0032】
したがって、(i)クラッチが係合状態の時にクラッチのトルク容量を制御するという要件、および(ii)クラッチの状態を切断状態から係合状態に迅速に変化させるという要件を満足する際にさらに別の問題がある。
【0033】
本発明の第3の態様は、クラッチを介してトランスミッションの出力に接続することができる連続可変比率ユニット(バリエータ)を有する連続可変トランスミッションのクラッチを制御する油圧装置である。これは、高圧の作動油を供給する第1の供給手段と、制御した圧力の作動油を供給する第2の供給手段と、該第1の供給手段をクラッチに接続してクラッチの状態を切断状態から係合状態に変化させ、その後第1の供給手段をクラッチから切り離し、第2の供給手段をクラッチに接続してクラッチを係合状態に維持するバルブ手段とを含む。
【0034】
バルブ手段は、クラッチを第1の供給手段に接続した状態とクラッチを第2の供給手段に接続した状態とを切り替える第1のバルブを含むことが好ましい。
【0035】
第1のバルブは、クラッチの流体圧力に応じて制御することができる。
【0036】
これにより、このバルブは、第1の供給手段から第2の供給手段への制御遷移を行うことができる。
【0037】
さらに詳細には、第1のバルブは、クラッチの流体圧力および第2の流体供給手段からの圧力に対応する反対の信号に応じて制御することができる。
【0038】
この実施形態では、このバルブは、クラッチの流体圧力が第2の流体供給手段からの圧力に達する前に第1の流体供給手段から第2の流体供給手段に切り替えるように制御されることが好ましい。
【0039】
したがって、第1の供給手段からの流体が急速にクラッチを充填した後で、第2の供給手段によるクラッチの制御へ滑らかに移行することができる。
【0040】
第1のバルブは、クラッチと第2の供給手段からの反対の圧力信号を受けるパイロット制御弁として構成されることが好ましい。
【0041】
本発明の特に好ましい実施態様では、このバルブ手段は、第1の供給手段からクラッチ前の経路に接続され、かつこの経路を開くことで切断状態から係合状態へのクラッチ状態の変化を開始する働きをする電気制御弁をさらに含む。
【0042】
この電気制御弁は電磁弁にすることができる。
【0043】
このような実施態様では、電気制御弁は、第1のバルブからクラッチまでの経路内にあり、この第1のバルブは、第1の供給手段と第2の供給手段の一方を選択的に電気制御弁に接続し、かつクラッチが切断されているときには第1の供給手段を電気制御弁に接続する状態に休止するように配置される。
【0044】
したがって、この電気制御弁は、第1のバルブからクラッチまでの流れに対して開くことによって、第1の供給手段からクラッチまでの流れを生じさせ、クラッチを係合状態にする。このように構成することにより、クラッチの充填に必要な流れを迅速に開始することができるが、この流れは両方のバルブを流れなければならない。
【0045】
代替の実施態様では、電気制御弁は、第1のバルブに圧力信号を加えて第1のバルブを往復させて第1の供給手段からクラッチまでの経路を開くことによってクラッチの状態変化を開始するように構成される。
【0046】
この実施形態には、第1の供給手段からクラッチまでの流路がバルブを1つだけ、すなわち第1のバルブだけ含んでいればよいという利点がある。
【0047】
所要の圧力信号は、第2の供給手段からとられることが好ましい。さらに、この圧力信号に対して、クラッチからとった別の圧力信号が対抗し、クラッチ圧力が上昇するにつれて第1のバルブが戻ってクラッチを第2の供給手段に接続することが好ましい。
【0048】
第2の供給手段からクラッチに加えられる流体圧力の調節は、トランスミッションのパラメータに応じて行われることが好ましい。電子制御ユニット(ECU)が、当該パラメータを監視し、ヒューズ圧力を設定することが好ましい。
【0049】
好ましくは、その効果として、第2の供給手段からの圧力がトルク要求量に応じて調節されることが好ましい。多レジーム・トランスミッションでは、これは、圧力と、したがってクラッチのトルク容量とを、伝達レジーム、油圧式バリエータ・アクチュエータにかかる差圧およびバリエータ比の関数として制御することによって行うことができる。
【0050】
本発明の特に好ましい実施形態では、システムは、クラッチが係合している間にクラッチのトルク容量を繰り返し調節する。このような反復調節は、例えば電子的制御の下で行われ、実際には連続プロセスにすることができる。
【発明を実施するための最良の形態】
【0051】
例示のみを目的として、添付の図面を参照しながら本発明の具体的な実施形態について述べる。
【0052】
バリエータ10とその他のトランスミッション構成部品との関係は、図2から理解することができる。図示のトランスミッションは、高レジーム、低レジームのいずれでも動作可能である。エンジンまたはその他の原動機200は、入力シャフト205およびギア210を介して、バリエータ10の入力側およびCで示すエピサイクリック・ミキサ220のキャリアの双方を駆動する(適切なエピサイクリック・ミキサの構造は当業者には周知であり、ここでは詳細には述べない)。ミキサの太陽歯車は、Sで示すようにバリエータの出力によって駆動される。したがって、エピサイクリック・ミキサの出力Oは、バリエータ比で変化するが、トランスミッションの低レジームではバリエータ比とは異なる。低レジームは、ミキサ出力を前方に伝達するクラッチ230によってトランスミッションの出力シャフト240に結合される。低レジームは、バリエータ10、ギア210、エピサイクリック・ミキサ220を含むループ内で動力が循環するので、「動力循環」レジームと呼ばれることもある。
【0053】
高レジームでは、低レジーム・クラッチ230が切り離され、バリエータ出力が高レジーム・クラッチ250を介して出力シャフト240に伝達され、したがってエピサイクリック・ミキサは迂回される。
【0054】
いずれのレジームでも、係合したクラッチ230または250が滑ると、入力シャフト200と出力シャフト240が切り離され、こうしてトルク・スパイクに関連する諸問題を回避することができることは明らかであろう。
【0055】
この実施形態では、クラッチは従来の油圧作動型のものである。また、トルク・スパイクが起きている間に滑りを発生させることができるように係合状態のクラッチに加える適切に制御された油圧を発生する供給手段として働く回路300を図3に示す。ここで、弾性的に変化する容積を有する従来型のアキュムレータ302は、ポンプ304と、必要なアキュムレータ圧力が得られたときに開いてポンプ出力を抜く逃がし弁306とによって高圧に維持される。必要なアキュムレータ圧力を実現するための、さらにエネルギー効率の良いその他の装置も当業者には既知であり、それらを利用することもできる。ポンプ出力は、逆止め弁308を介してアキュムレータに供給される。アキュムレータはさらに減圧弁310の入力ポートに接続され、この弁の出力ポートはこの回路の「ヒューズ圧力」出力FPとなっている。「ヒューズ圧力」という用語は、本明細書では、クラッチに加えられる制御された圧力を指す。
【0056】
この出力の圧力は、弁310のソレノイドに加えられる信号を変調する電子制御ユニット(ECU)311によって制御され、その結果生じるこの弁のスプールにかかる力は、312に示すようにこの弁の出力からとるパイロット圧力信号によって対抗される。ソレノイドの信号によって決まる圧力に達すると、この圧力による力はソレノイドの力を超え、スプールが移動して弁310を閉じ、これによりその出力がアキュムレータから切り離される。弁310が閉じているときには、圧力を降下させることができるように、弁の出力から流れが出るための制限された経路を設けなければならない。これを314に示すが、既存のシステムでは、トランスミッションのサンプ316に戻る漏れが十分な流れを提供する。
【0057】
レジームの変化中以外は、回路300からのヒューズ圧力出力FPは、係合したクラッチ230または250に加えられ、ECUが決定したクラッチ係合力を維持するようにECU311によって制御される。
【0058】
ECU311は、様々な車両動作パラメータに関する入力を受信し、これらのパラメータの組合せの選択に応じてヒューズ圧力を設定することができる。ECU311を使用してヒューズ圧力を制御することで、トルク・スパイクによる油圧バリエータ制御回路内の圧力スパイクがヒューズ圧力に影響を及ぼさないようにすることができる。仮にそうでなければ、本発明の目的を達成することができなくなる可能性もある。
【0059】
レジームが変化すると、一方のクラッチが係合し、もう一方が切り離される。この変化は、上述のように同期動作の間に素早く行われることが望ましく、クラッチ・ヒューズ圧力は、現在のシステムでは、必要な速度でのクラッチ係合を実現するには不十分である。
【0060】
図4は、この問題を克服する油圧回路400を示す図である。この図には簡略にするためにクラッチを1つしか示していないが、このクラッチは、レジームの変化(高から低またはその逆)に応じて低レジーム・クラッチ230または高レジーム・クラッチ250のいずれにもなることを理解されたい。アキュムレータ402は、高圧供給手段として働き、ポンプ404および連動する逃がし弁406によって高圧に維持される。ヒューズ圧力回路(図3に詳細に示す)は、ここではブロック300で示す。ダブル・パイロット作動式方向弁408は、高圧アキュムレータ402またはヒューズ圧力回路300のいずれかを、クラッチ230または250に流体接続された3ポート2位置電磁弁410に接続する働きをする。反対のパイロット圧力信号は、それぞれ409および411で示すように、クラッチおよびヒューズ圧力回路300からパイロット作動弁408に供給される。
【0061】
回路400は、以下のように動作する。電磁弁410は、消勢状態では、クラッチを直接サンプ412に接続する働きをするので、クラッチ230、250は切り離される。クラッチが切り離され、したがって大気圧に保たれている間は、ライン411を介してパイロット作動弁408に作用するヒューズ圧力に対抗するのは、スプールに作用するばねバイアス力のみである。ヒューズ圧力による力の方が優勢であり、パイロット作動弁408は、電磁弁410の閉じたポートをアキュムレータ402に接続する位置にある。したがって、電磁弁410は、アキュムレータからの流れを妨げる。
【0062】
電磁弁410がバイアスされてクラッチが係合すると、パイロット作動弁408と電磁弁410の双方を通る流れが生じ、高圧アキュムレータは急速にクラッチを充填する。クラッチの圧力は急速に上昇し、これによりクラッチは急速に係合する。クラッチの圧力がヒューズ圧力による力とパイロット作動弁408のスプールにかかるばねバイアス力との差を超えると、スプールが移動してクラッチ230、250をヒューズ圧力回路300に接続する。ばねバイアス力により、この弁の移動は、クラッチが回路300からのヒューズ圧力に達する前に起こる。その後、クラッチ圧はヒューズ圧力まで上昇し、これによりパイロット作動弁のスプールにかかる力が増大してこれがヒューズ位置に保持され、必要に応じてクラッチがヒューズ圧力回路300に接続される。こうして、クラッチは次のレジーム変化が起こるまで係合状態に保たれる。
【0063】
クラッチを切り離すには、電磁弁410を消勢し、それによりクラッチにかかっている圧力を弁410を介してタンクに逃がし、ヒューズ圧力が再びクラッチの圧力を超えるようにする。これにより、パイロット作動弁は、電磁弁410がアキュムレータ402に接続される位置に戻る。
【0064】
この回路の利点としては、クラッチ減圧経路が弁を1つしか介さないために減圧が迅速に行われること、また、クラッチの加圧が開始されたときにパイロット作動弁408が既にアキュムレータ402に接続されており、係合している間に必要とされる移動が1回だけであることが挙げられる。ただし、弁を2つ組み込んだクラッチ加圧経路は限定的なものであり、これによりクラッチ充填時間が長くなる、すなわち切断状態から係合状態へのクラッチの状態変化が遅くなる可能性がある。
【0065】
代替の油圧回路500を図5に示す。この場合も、アキュムレータ502は、ポンプ504とこれと関連づけられた弁506によって加圧される。この回路のダブル・パイロット作動式方向制御弁508は、アキュムレータ502からクラッチ230、250への直接経路507と、3ポート2位置電磁弁510を介してヒューズ圧力回路300に続く経路とを制御する。ダブル・パイロット作動式方向制御弁を制御するためには、2つの弁508と510の間の回路の1点から第1のパイロット圧力信号をとり、ライン511を介してパイロット作動弁508に与える。第1の信号と反対の第2のパイロット圧力信号は、パイロット作動弁508のクラッチ側からライン509を介してとる。この第2のパイロット信号は、クラッチ流体圧力となっている。回路500は以下のように動作する。
【0066】
電磁弁510が消勢された状態で、ヒューズ回路300は分離されており、ダブル・パイロット作動式方向制御弁508は、そのばねバイアス力によって決まる位置に休止している。この位置で、ダブル・パイロット作動式方向制御弁508は電磁弁510をクラッチ230、250に接続しており、クラッチは電磁弁510を介してサンプにつながり、したがって減圧され、切り離された状態である。
【0067】
電磁弁510がバイアスされてクラッチが係合すると、パイロット作動弁のスプールの一端でパイロット通路511を介してヒューズ圧力が上昇し、このスプールが、アキュムレータ・クラッチ加圧位置に移動し、この位置で、ライン507を介してクラッチ230、250をアキュムレータ502に接続する。この時点で、流れはパイロット作動弁508のみを通って流れるので、アキュムレータ502はクラッチ230、250を加圧する。これにより、図4の回路に比べて制限の少ない経路が得られ、したがってより早い充填時間を達成することができる。
【0068】
クラッチの圧力がヒューズ圧力による力とパイロット作動弁508のスプールにかかるばねバイアス力との差を超えると、このバルブは移動して、クラッチ230、250をヒューズ圧力回路300に直接接続する。その後、クラッチ圧力はヒューズ圧力まで上昇し、それによりパイロット作動弁508のスプールにかかる力も増大し、これがヒューズ位置に保持される。
【0069】
クラッチを再度切り離すときには電磁弁510を消勢する。パイロット作動弁508は同じ位置にとどまり、クラッチは電磁弁510を介して再度サンプに接続される。
【0070】
図5の回路では、クラッチ加圧経路は1つの弁しか介さず、パイロット作動弁508は、通常は電磁弁よりはるかに大きな開口を有するので、図4の回路に比べて充填時間を改善することができる。クラッチを充填するためには、パイロット作動弁508はアキュムレータの供給と戻しに合わせて移動しなければならず、これにより多少の遅延が生じる。しかし、この弁は同程度の大きさの電磁弁よりは高速である可能性が高い。ただし、減圧経路は1つではなく2つのバルブを含む。したがって、減圧時間は、図4の回路を用いた場合より長くなる可能性がある。
【0071】
図4および図5に示す回路の代替案としては、図3に示すタイプの回路を使用して、弁310を適切にソフトウェア制御することにより、クラッチ圧力を制御し、最初に高圧を形成して迅速なクラッチ係合を実現することが挙げられる。
【0072】
クラッチ圧力と、ひいてはそのトルク容量とを制御することで、トランスミッションの動作が大幅に柔軟になる。クラッチは、実質的には、トランスミッションのトルク制御の第2段階となる。さらに、以下で説明するように、クラッチを使用して、バリエータ制御信号、すなわちバリエータのアクチュエータ32に加えられる制御圧力を制御することができる。
【0073】
この実施形態では、ヒューズ圧力と、したがって係合したクラッチのトルク伝達能力とは、(1)トルク要求量、(2)バリエータ比、および(3)伝達レジームの関数として制御される。
【0074】
トルク要求量はECU311によって決定され、ECU311は、図6にきわめて概略的に示すように、図示の例では運転者が操作した加速ペダル600の位置やバリエータ比602(直接検知することも、エンジン速度や伝達レジーム、ホイール速度などその他の測定量から推測することもできる)を含む様々な動作パラメータに関する入力を受信する。ECU311は、例えば油圧ラインS1、S2内の弁60、62、および伝達レジームを制御する回路500などの上述のバルブ装置に制御出力を送信する。
【0075】
ECU311は、バリエータのリアクション・トルクの要求量を確立する。これは、エンジンとトランスミッションの制御戦略全体の一部である。ECUは、通常は、ペダル600の位置を被動ホイールにおけるトルク要件と解釈し、様々な動作パラメータを考慮に入れた上で、必要なホイール・トルクが効率的に提供されるようにエンジンとトランスミッションを制御する。バリエータに与えられる主な制御信号は、バリエータのリアクション・トルクに対応するラインS1、S2内の油圧であり、弁60、62は、ECU311がこれらの圧力を調節するための1つの手段を提供する。
【0076】
トルク要求量は、係合したクラッチ230、250が伝達する一定レベルのトルクに対応する。係合状態のクラッチの両端間のトルクとバリエータのリアクション・トルクの間の関係は高レジームと低レジームとで異なり、ECU311が考慮するもう1つの要因である。
【0077】
したがって、ECU311は、係合状態のクラッチが伝達しなければならないトルクのレベルを確立することができる。現在好ましい制御戦略は、ヒューズ圧力と、ひいてはクラッチのトルク容量とを、例えば10パーセントなど、選択したマージン分だけ必要レベルより高く設定することである。
【0078】
したがって、クラッチの両端間のトルクがECU311が確立した必要量またはその近傍に維持される間は、クラッチに滑りは生じない。しかし、運転者が突然制動したことによってトルク・スパイクが生じた場合のように、係合状態のクラッチの両端間のトルクが必要レベルを超えて上昇した場合には、クラッチが滑る。
【0079】
トルク・スパイクに応答してECU311が直ちにクラッチ圧力を調節する必要はないことに留意されたい。その代わりに、要求されたトルクの伝達に必要なレベルのすぐ上のレベルに常にクラッチを維持することにより、クラッチが常にスパイクに応答して滑ることができる状態にしておく。この応答は、能動的というよりはむしろ受動的といえる。これは、トルク・スパイクは一般にECUや油圧系が反応できない速さで起こるので有利である。クラッチによる受動応答は瞬間的に起こるので、システムは十分な速さでトルク・スパイクに反応することができる。トルク・スパイクを検出し、その後それに応じてトランスミッションを調節することによる能動応答は、スパイクからの保護を行えるだけの速さで行うことができない。クラッチの調節はループで実行され、実質的には準連続プロセスである。
【0080】
トランスミッションは、要求バリエータ・トルクからの任意の偏移からクラッチによって保護される。過度な駆動ライン・トルクを発生する速度の比率変化が発生した場合には、クラッチが滑り、バリエータ比の変化速度を制限することになる。
【0081】
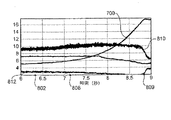
クラッチのトルク容量を制御することにより、バリエータのリアクション・トルクとラインS1、S2内の制御圧力とを両方とも制御する2次的な手段が得られる。図7および図8は、この点を例証する実験データを示す図である。何れの図も、秒を単位とする時間を横軸にとっている。図8の縦軸の単位は毎分回転数である。図7は、異なるいくつかの量を示しており、縦軸の単位は任意である。線800はトランスミッション出力の速度を示し、これは、約600rpmで開始し、車両の場合に運転者手動ブレーキでが車両のホイールをロックしたときに見られるように、約0.1秒で、時点802で固定される(一定レベルまで減速される)ことが分かる。線804は、クラッチの滑り、すなわちクラッチの一方の側の他方に対する相対的な回転速度を表す。この試験では、クラッチは、約7.5バールから始まる調整されたヒューズ圧力を受ける。その結果として、トランスミッション出力が固定されると、クラッチは最初に滑る。クラッチの一方の側は600rpmで回転し続けるが、他方(トランスミッション出力側)は固定されている。対照的に、線700で示すバリエータ比は、クラッチの滑りによって瞬間的に変化する必要がない。出力の固定によってバリエータにかかる追加の荷重(クラッチが滑らなければ、バリエータ比のきわめて急速な変化を必要とする)は、クラッチが滑ることによって減少する。どの程度の追加荷重をクラッチがバリエータに伝達しても、この例では約2秒間の間に、バリエータはその比率を徐々に変化させ、トランスミッションの入力速度と出力速度を一致させる。この期間808では、バリエータが「追いつく」につれて、クラッチの滑りは徐々に減少する。時点809で、バリエータはギヤ・ニュートラルに対応する比率に到達し、この時点でクラッチの滑りがなくなる。
【0082】
線810、812は、ラインS1、S2内の圧力を表す。クラッチが滑らなかった場合には、トランスミッション出力の固定後の急速な比率の変化は、これらの圧力の極端かつ急速な変化を生じる。しかし、ここでは圧力はクラッチによって制御され、したがって時点802では検知できるほどには変化していない。この点で、この例は若干特殊である。通常は、ある程度の圧力変化が生じることが予想され、その大きさはトルク要求量(弁60、62によって設定されるS1、S2内の初期圧力に対応する)とクラッチのトルク容量の間のマージンによって決まる。
【0083】
クラッチが滑り始めた後は、クラッチがバリエータに伝えるトルク荷重はクラッチのトルク容量と等しい。したがって、バリエータは、トランスミッション出力における外乱から隔離される。その後、クラッチのトルク容量はバリエータ比の変化速度に、したがって要求されるバリエータ制御圧力と実際のバリエータ制御圧力の差に直接影響を及ぼす。
【0084】
クラッチによる制御モードは、以下のように説明することができる。
【0085】
i.時点802と809の間では、滑っているクラッチのトルク容量によって、バリエータ出力に加えられるトルクが決定される。
ii.この印加トルクにより、バリエータ比がシフトし、これに伴ってバリエータのローラおよびそれらのピストン52、54が運動する。
iii.その結果生じるバルブ60、62の流量の変化により、ピストン52、54に作用する圧力に変化が生じ、その結果として、バリエータのリアクション・トルクにも変化が生じる。
iv.クラッチが加えるトルクに対抗する出力トルクを生成する。
v.これにより、トランスミッション出力の突然の減速に対応するようにバリエータ比が調節される速度が決定される。
【0086】
S1/S2圧力差への変化dPは、は、クラッチが加えるトルクのみによって決まるのではなく、バリエータ比にも依存している。所与の出力トルク(クラッチのトルク)によって生じるリアクション・トルク(およびそれに対応するS1/S2圧力差)は、バリエータ比と共に変化する。バリエータ比が低下すると、クラッチによって生じる比率変化に対するバリエータの抵抗は増大する。換言すれば、所与のリアクション・トルクに対して、比率が低下すればバリエータ出力トルクは増大する。したがって、所与のリアクション・トルクに対しては、バリエータ比が低ければより大きなクラッチ容量が必要となる。
【0087】
したがって、dPを正確に調整するためには、追加の変数、すなわちバリエータ比の関数としてクラッチ・トルク容量を制御することが必要である。線814は、クラッチ圧力を表し、これは、バリエータ比が変化するにつれて変化していることが分かる。クラッチ容量の調節は、バリエータ比の変化を吸収できる程度に十分に素早く実行することも必要である。バリエータ比の変化速度自体はクラッチ容量によって制御され、したがって許容可能な限界内に維持することができるので、これは可能である。
【0088】
バリエータ荷重の変化によってS1/S2圧力差の大きな変化(および対応するバリエータ・リアクション・トルクの大きな変化)が生じることが防止されるので、寒冷気候での始動時など流体の温度が低い場合でも、前述した端末荷重とバリエータ・リアクション・トルクの間の不整合の問題は回避される。このような状態では、クラッチのトルク容量は、実際には、常にクラッチを滑らせるレベルに設定することができ、この始動期間中は、バリエータではなくクラッチが、出力トルクの第1の決定要因となる。
【0089】
本発明は数多くの可能性を生み出すものであり、上述の実施形態は単なる例示であって、本発明の範囲は添付の特許請求の範囲によって決定されることを理解されたい。
【図面の簡単な説明】
【0090】
【図1】それ自体は既知であり、本発明によるトランスミッションに組み込むことができる、トロイダル・レース・ローリング・トラクション型バリエータの簡略部分断面図である。
【図1a】図1のバリエータを制御する既知の油圧回路を示す図である。
【図2】本発明によって動作可能なトランスミッションの概略図である。
【図3】本発明によるヒューズ圧力制御回路を示す図である。
【図4】本発明によるクラッチ制御回路を示す図である。
【図5】本発明による別のクラッチ制御回路を示す図である。
【図6】本発明によるトランスミッションの電子制御ユニットへの入力を概略的に示す図である。
【図7】本発明によるシステムの試験中の様々な動作パラメータの経時変化を示す、実験データを示すグラフである。
【図8】本発明によるシステムの試験中の様々な動作パラメータの経時変化を示す、実験データを示すグラフである。
Claims (33)
- トランスミッション入力と、トランスミッション出力と、少なくとも1つのクラッチを介してトランスミッションの入出力の間に結合され、連続可変伝達比で入力と出力の間で駆動力を伝達するように配置された連続可変比率ユニット(バリエータ)とを含む連続可変トランスミッションであって、前記バリエータが油圧制御回路に接続され、その制御回路で調節されるとともにバリエータ比の変化の影響も受ける油圧制御圧力を受け、さらに前記バリエータは、前記制御圧力に対応するバリエータ・リアクション・トルクを発生させるためにその比を調節するように構成および配置され、前記トランスミッションが、バリエータに加えられるトルク荷重を制御することによってクラッチが制御圧力とリアクション・トルクとに影響を及ぼすように、クラッチが係合しているときにクラッチのトルク容量を調節する手段をさらに含む連続可変トランスミッション。
- トルク要求量に応じてクラッチのトルク容量を設定する制御エレクトロニクスをさらに含む請求項1に記載の連続可変トランスミッション。
- 前記制御エレクトロニクスが、運転者操作制御に接続され、そこからの信号に応じてトランスミッションのトルク要求量を計算する請求項2に記載の自動車で使用する連続可変トランスミッション。
- 前記制御エレクトロニクスが、バリエータ比を監視する手段に接続され、クラッチのトルク容量を設定する際にバリエータ比をさらに考慮に入れる請求項2または3に記載の連続可変トランスミッション。
- 少なくとも2つの異なるレジームで動作することができ、前記制御エレクトロニクスが、クラッチのトルク容量を設定する際に伝達レジームをさらに考慮に入れる先行する請求項のいずれかに記載の連続可変トランスミッション。
- 前記制御エレクトロニクスが、クラッチのトルク容量を、トランスミッションから要求されたトルクを伝達するのに必要なレベルを選択したマージン分だけ超えるレベルに設定する制御モードを提供する請求項2から5のいずれかに記載の連続可変トランスミッション。
- 所望の制御圧力を確立し、それに応じて制御回路を設定する制御エレクトロニクスをさらに含み、前記制御エレクトロニクスが、バリエータ荷重の変化による制御圧力の所望レベルからの偏移がクラッチの滑りによって抑制されるようにクラッチを調節する働きもする先行する請求項のいずれかに記載の連続可変トランスミッション。
- 前記エレクトロニクスが、所望の制御プロファイルに基づいて制御圧力を維持するようにクラッチを制御する請求項7に記載の連続可変トランスミッション。
- トランスミッション入力と、トランスミッション出力と、少なくとも1つのクラッチを介してトランスミッションの入出力の間に結合され、連続可変伝達比で入力と出力の間で駆動力を伝達するように配置された連続可変比率ユニット(バリエータ)とを含み、前記バリエータが油圧制御回路に接続され、その制御回路からの制御圧力に対応するバリエータ・リアクション・トルクを発生させるためにその比を調節するように構成かつ配置された連続可変トランスミッションを動作させる方法であって、前記制御回路を制御して、バリエータ比の変化の影響を受ける調節可能な油圧制御圧力をバリエータに加えるステップと、バリエータに加えられるトルク荷重を制御することによってクラッチが制御圧力とリアクション・トルクとに影響を及ぼすように、クラッチが係合している間にクラッチのトルク容量を調節するステップとを含む方法。
- トランスミッションのトルク要求量に応じてクラッチのトルク容量を設定するステップをさらに含む請求項9に記載の方法。
- 前記トランスミッションが自動車用のものであり、前記方法が、運転者操作制御からの信号に応じてトランスミッションのトルク要求量を計算するステップをさらに含む請求項10に記載の方法。
- バリエータ比を監視するステップを含み、クラッチのトルク容量を設定する際にバリエータ比をさらに考慮に入れることを含む請求項9から11のいずれかに記載の方法。
- 前記トランスミッションが少なくとも2つの異なるレジームで動作することができ、前記方法が、クラッチのトルク容量を設定する際に伝達レジームをさらに考慮に入れることを含む請求項9から12のいずれかに記載の方法。
- 少なくとも一部の時間の間、クラッチのトルク容量が、トランスミッションから要求されたトルクを伝達するのに必要なレベルを選択したマージン分だけ超えるレベルに設定される請求項9から13のいずれかに記載の方法。
- 所望の制御圧力を確立するステップと、それに応じて制御回路を設定するステップと、バリエータ荷重の変化による制御圧力の所望レベルからの偏移がクラッチの滑りによって抑制されるようにクラッチを調節するステップとを含む請求項9から14のいずれかに記載の方法。
- 所望の制御プロファイルに基づいて制御圧力を維持するようにクラッチを制御するステップを含む請求項9から15のいずれかに記載の方法。
- クラッチを介してトランスミッション出力に接続することができる連続可変比率ユニット(バリエータ)を有する連続可変トランスミッションのクラッチを制御する油圧装置であって、高圧の作動油を供給する第1の供給手段と、制御した圧力の作動油を供給する第2の供給手段と、前記第1の供給手段をクラッチに接続してクラッチの状態を切断状態から係合状態に変化させ、その後第1の供給手段をクラッチから切り離し、第2の供給手段をクラッチに接続してクラッチを係合状態に維持するバルブ手段とを含む油圧装置。
- 前記バルブ手段が、クラッチを第1の供給手段に接続した状態とクラッチを第2の供給手段に接続した状態とを切り替える第1のバルブを含む請求項17に記載の油圧装置。
- 前記第1のバルブが、クラッチの流体圧力に応じて制御される請求項18に記載の油圧装置。
- 前記第1のバルブが、クラッチの流体圧力と第2の流体供給手段からの圧力に対応する相反する信号に応じて制御される請求項18に記載の油圧装置。
- 前記第1のバルブが、クラッチの流体圧力が第2の流体供給手段からの圧力に達する前に第1の流体供給手段から第2の流体供給手段に切り替えるように制御される請求項20に記載の油圧装置。
- 前記第1のバルブが、クラッチと第2の供給手段からとられる相反する圧力信号によって制御されるパイロット制御弁である請求項20または21に記載の油圧装置。
- 前記バルブ手段が、第1の供給手段からクラッチ前の経路に接続され、かつこの経路を開くことで切断状態から係合状態へのクラッチ状態の変化を開始する働きをする電気制御弁を含む請求項18から22のいずれかに記載の油圧装置。
- 前記電気制御弁が、第1のバルブからクラッチまでの経路内にあり、前記第1のバルブが、第1の供給手段と第2の供給手段の一方を選択的に電気制御弁に接続し、かつクラッチが切断されているときには第1の供給手段を電気制御弁に接続する状態に休止するように配置されている請求項23に記載の油圧装置。
- 前記電気制御弁が、第1のバルブに圧力信号を加えて第1のバルブを移動させて第1の供給手段からクラッチまでの経路を開くことによってクラッチの状態変化を開始するように構成されている請求項23に記載の油圧装置。
- 前記圧力信号が第2の供給手段からとられる請求項25に記載の油圧装置。
- 前記圧力信号に対して、クラッチからとった別の圧力信号が対抗し、クラッチ圧力が上昇するにつれて第1のバルブが戻ってクラッチを第2の供給手段に接続する請求項24または25に記載の油圧装置。
- 前記電気制御弁が、その1つの位置にあるときにクラッチをドレンに接続してクラッチを切り離す3ポート2位置バルブである請求項23から27のいずれかに記載の油圧装置。
- 第2の供給手段からの圧力が、クラッチが係合状態にある間にトランスミッションの動作パラメータに応じて制御される請求項17から28のいずれかに記載の油圧装置。
- 第2の供給手段からの圧力が、トランスミッションにトルク・スパイクが発生した場合にクラッチを滑らせるように制御される請求項29に記載の油圧装置。
- クラッチのトルク容量をトランスミッションのトルク要求量に応じて制御するように第2の供給手段からの圧力が調節される請求項17から30のいずれかに記載の油圧装置。
- クラッチのトルク容量が、伝達レジーム、トルク要求量、バリエータ比に関連づけて制御される請求項29から31のいずれかに記載の多レジーム・トランスミッション用の油圧装置。
- 電子制御ユニットによって第2の供給手段からの圧力が制御される請求項17から32のいずれかに記載の油圧装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP01307445 | 2001-08-31 | ||
| GB0121069A GB0121069D0 (en) | 2001-08-31 | 2001-08-31 | Hydraulic arrangement for controlling a clutch |
| PCT/GB2002/003885 WO2003021135A1 (en) | 2001-08-31 | 2002-08-22 | Continuously variable transmission and method of operation thereof |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005502008A true JP2005502008A (ja) | 2005-01-20 |
| JP2005502008A5 JP2005502008A5 (ja) | 2006-01-05 |
Family
ID=26077170
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003525174A Pending JP2005502008A (ja) | 2001-08-31 | 2002-08-22 | 連続可変トランスミッションおよびその動作方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7160226B2 (ja) |
| EP (2) | EP1457716B1 (ja) |
| JP (1) | JP2005502008A (ja) |
| AT (2) | ATE298852T1 (ja) |
| DE (2) | DE60215855T2 (ja) |
| ES (1) | ES2246407T3 (ja) |
| WO (1) | WO2003021135A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008014325A (ja) * | 2006-06-30 | 2008-01-24 | Kawasaki Heavy Ind Ltd | 無段変速機の制御方法および制御システム |
| JP2010505074A (ja) * | 2006-09-26 | 2010-02-18 | トロトラク・(ディヴェロプメント)・リミテッド | 連続可変変速機 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004007103B4 (de) * | 2003-02-20 | 2019-06-13 | Schaeffler Technologies AG & Co. KG | Verfahren und Vorrichtung zum Adaptieren eines Kupplungsmoments |
| US8370184B2 (en) * | 2004-03-08 | 2013-02-05 | Sap Aktiengesellschaft | System and method for assortment planning |
| GB0501763D0 (en) * | 2005-01-28 | 2005-03-02 | Torotrak Dev Ltd | Powertrain control method and system |
| GB0513721D0 (en) * | 2005-07-05 | 2005-08-10 | Torotrak Dev Ltd | Ratio limiting arrangement |
| US7972240B2 (en) * | 2007-12-19 | 2011-07-05 | Deere & Company | Work machine with power limit control using an infinitely variable transmission |
| GB0805213D0 (en) * | 2008-03-20 | 2008-04-30 | Torotrak Dev Ltd | An electric controller for a continuously variable transmission and a method of control of a continuously variable transmission |
| US8118706B2 (en) * | 2008-06-30 | 2012-02-21 | Caterpillar Inc. | Machine having a multiple-ratio transmission |
| US7887471B2 (en) * | 2008-11-25 | 2011-02-15 | Mcsorley Tyrone G | Neuromuscular training apparatus and method of use |
| US20100240491A1 (en) * | 2009-03-17 | 2010-09-23 | Parag Vyas | System for vehicle propulsion having and method of making same |
| US8535200B2 (en) * | 2009-03-17 | 2013-09-17 | General Electric Company | Vehicle propulsion system having a continuously variable transmission and method of making same |
| US8827864B2 (en) | 2009-10-08 | 2014-09-09 | Ultimate Transmissions Pty Ltd | Full toroidal traction drive |
| US8230961B2 (en) * | 2009-11-04 | 2012-07-31 | Toyota Motor Engineering & Manufacturing North America, Inc. | Energy recovery systems for vehicles and wheels comprising the same |
| US8172022B2 (en) * | 2009-11-30 | 2012-05-08 | Toyota Motor Engineering & Manufacturing North America, Inc. | Energy recovery systems for vehicles and vehicle wheels comprising the same |
| WO2011075427A1 (en) * | 2009-12-16 | 2011-06-23 | Allison Transmission, Inc. | System and method for controlling endload force of a variator |
| US8401752B2 (en) * | 2009-12-16 | 2013-03-19 | Allison Transmission, Inc. | Fail-to-neutral system and method for a toroidal traction drive automatic transmission |
| CN102712312B (zh) * | 2009-12-16 | 2015-08-05 | 艾里逊变速箱公司 | 变换器故障检测系统 |
| US8578802B2 (en) * | 2009-12-16 | 2013-11-12 | Allison Transmission, Inc. | System and method for multiplexing gear engagement control and providing fault protection in a toroidal traction drive automatic transmission |
| CA2784373C (en) | 2009-12-16 | 2017-11-07 | Allison Transmission, Inc. | Fast valve actuation system for an automatic transmission |
| US8676515B2 (en) * | 2009-12-16 | 2014-03-18 | Allison Transmission, Inc. | System and method for detecting clutch-related faults in an automatic transmission |
| CN102713361B (zh) | 2009-12-16 | 2015-11-25 | 艾里逊变速箱公司 | 变换器闭锁阀系统 |
| EP2606258B1 (en) | 2010-08-16 | 2020-08-05 | Allison Transmission, Inc. | Gear scheme for infinitely variable transmission |
| WO2012082871A1 (en) | 2010-12-15 | 2012-06-21 | Long Charles F | Variator multiplex valve scheme for a torroidal traction drive transmission |
| EP2655938A4 (en) | 2010-12-15 | 2016-07-27 | Allison Transm Inc | DRIVE SWITCHING VALVE PROGRAM FOR TORONTO TRACTION DRIVE TRANSMISSION |
| WO2012082843A1 (en) | 2010-12-15 | 2012-06-21 | Long Charles F | Dual pump regulator system for a motor vehicle transmission |
| DE102017214115A1 (de) * | 2017-08-11 | 2019-02-14 | Knorr-Bremse Systeme für Schienenfahrzeuge GmbH | Vorrichtung zur Steuerung einer Anpresskraft eines Stromabnehmers mit einem Relaisventil |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4433594A (en) * | 1981-04-24 | 1984-02-28 | Borg-Warner Corporation | Variable pulley transmission |
| US4665773A (en) * | 1984-03-13 | 1987-05-19 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Continuously variable transmission apparatus for automobile |
| US4674613A (en) * | 1985-12-16 | 1987-06-23 | Controlled Hydraulics, Inc. | Electrically controlled transmission soft shifter |
| IT1211449B (it) * | 1987-11-02 | 1989-10-26 | Same Spa | Circuito idraulico di comando di in nesti a frizione in power shift per cambi di trattori |
| US4942787A (en) | 1988-03-03 | 1990-07-24 | Honda Giken Kogyo Kabushiki Kaisha | Apparatus for and method of controlling hydraulic clutch operation in an automatic transmission |
| JPH0341252A (ja) * | 1989-07-06 | 1991-02-21 | Mazda Motor Corp | 無段変速機を備えた車両の制御装置 |
| NL9000589A (nl) * | 1990-03-15 | 1991-10-01 | Doornes Transmissie Bv | Continu variabele transmissie. |
| US5006092A (en) | 1990-05-24 | 1991-04-09 | Borg-Warner Automotive, Inc. | Continuously variable transmission power train configuration |
| US5064036A (en) * | 1990-05-24 | 1991-11-12 | Borg-Warner Automotive, Inc. | Adaptive torsional damping device for a continuously variable transmission |
| DE4324810A1 (de) * | 1993-07-23 | 1995-01-26 | Zahnradfabrik Friedrichshafen | Regelverfahren für ein stufenloses Umschlingungsgetriebe |
| US5938557A (en) * | 1996-04-19 | 1999-08-17 | Torotrak (Development) Limited | CVT Control System |
| GB2312257A (en) * | 1996-04-19 | 1997-10-22 | Torotrak Dev Ltd | Toroidal race variator control system varies end loading according to net pres sure |
| DE19712713A1 (de) * | 1997-03-26 | 1998-10-01 | Bosch Gmbh Robert | Vorrichtung und Verfahren zur Steuerung eines CVT bei einem Kraftfahrzeug |
| DE19903554C2 (de) * | 1999-01-29 | 2002-03-21 | Daimler Chrysler Ag | Kraftfahrzeug-Antriebsstrang und Verfahren zu seiner Steuerung |
| GB9906782D0 (en) | 1999-03-25 | 1999-05-19 | Ici Plc | Receiver medium for ink jet printing |
| EP1069331B1 (en) * | 1999-07-06 | 2002-05-08 | Van Doorne's Transmissie B.V. | Method for controlling a continuously variable transmission having a continuously slipping clutch |
| JP3571607B2 (ja) * | 2000-03-27 | 2004-09-29 | 本田技研工業株式会社 | ベルト式無段変速機 |
| DE10053110A1 (de) * | 2000-10-26 | 2002-05-08 | Bosch Gmbh Robert | Verfahren zum Betreiben einer Kupplung und Regeleinrichtung zur Durchführung des Verfahrens |
| DE10129068A1 (de) * | 2001-06-15 | 2002-12-19 | Bosch Gmbh Robert | Verfahren und Vorrichtung zum Steuern und/oder Regeln des Schlupfes einer Kupplung |
-
2002
- 2002-08-22 JP JP2003525174A patent/JP2005502008A/ja active Pending
- 2002-08-22 WO PCT/GB2002/003885 patent/WO2003021135A1/en active IP Right Grant
- 2002-08-22 AT AT02751451T patent/ATE298852T1/de not_active IP Right Cessation
- 2002-08-22 AT AT04076792T patent/ATE344409T1/de not_active IP Right Cessation
- 2002-08-22 US US10/489,139 patent/US7160226B2/en not_active Expired - Lifetime
- 2002-08-22 EP EP04076792A patent/EP1457716B1/en not_active Expired - Lifetime
- 2002-08-22 EP EP02751451A patent/EP1421300B1/en not_active Expired - Lifetime
- 2002-08-22 ES ES02751451T patent/ES2246407T3/es not_active Expired - Lifetime
- 2002-08-22 DE DE60215855T patent/DE60215855T2/de not_active Expired - Lifetime
- 2002-08-22 DE DE60204898T patent/DE60204898T2/de not_active Expired - Lifetime
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008014325A (ja) * | 2006-06-30 | 2008-01-24 | Kawasaki Heavy Ind Ltd | 無段変速機の制御方法および制御システム |
| JP4495117B2 (ja) * | 2006-06-30 | 2010-06-30 | 川崎重工業株式会社 | 無段変速機の制御方法および制御システム |
| JP2010505074A (ja) * | 2006-09-26 | 2010-02-18 | トロトラク・(ディヴェロプメント)・リミテッド | 連続可変変速機 |
| KR101440848B1 (ko) * | 2006-09-26 | 2014-11-03 | 토로트랙 (디벨로프먼트) 리미티드 | 연속 가변 트랜스미션 |
| JP2015007481A (ja) * | 2006-09-26 | 2015-01-15 | トロトラク・(ディヴェロプメント)・リミテッド | 連続可変変速機 |
| JP2017062039A (ja) * | 2006-09-26 | 2017-03-30 | トロトラク・(ディヴェロプメント)・リミテッド | 連続可変変速機 |
| JP2018200115A (ja) * | 2006-09-26 | 2018-12-20 | アリソン・トランスミッション・インコーポレイテッド | 連続可変変速機 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE60215855T2 (de) | 2007-06-06 |
| EP1421300B1 (en) | 2005-06-29 |
| DE60204898T2 (de) | 2006-05-11 |
| US20050043138A1 (en) | 2005-02-24 |
| ES2246407T3 (es) | 2006-02-16 |
| DE60204898D1 (de) | 2005-08-04 |
| DE60215855D1 (de) | 2006-12-14 |
| EP1421300A1 (en) | 2004-05-26 |
| EP1457716B1 (en) | 2006-11-02 |
| EP1457716A2 (en) | 2004-09-15 |
| US7160226B2 (en) | 2007-01-09 |
| ATE298852T1 (de) | 2005-07-15 |
| ATE344409T1 (de) | 2006-11-15 |
| EP1457716A3 (en) | 2005-07-06 |
| WO2003021135A1 (en) | 2003-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005502008A (ja) | 連続可変トランスミッションおよびその動作方法 | |
| US20220003312A1 (en) | Controller for variable transmission | |
| US7056261B2 (en) | Hydraulic control circuit for a continuously variable transmission | |
| US8187151B2 (en) | Method for controlling the oil supply of an automatic planetary transmission | |
| EP1076786B1 (en) | An hydraulic control circuit for a continuously-variable-transmission | |
| RU2646780C2 (ru) | Система управления транспортного средства | |
| US10253875B2 (en) | System and method for multiplexing gear engagement control and providing fault protection in a toroidal traction drive automatic transmission | |
| EP2053277A2 (en) | Method for model based clutch control and torque estimation | |
| CA2879056C (en) | Control device for automatic transmission for vehicle | |
| JPH075040B2 (ja) | 連続可変変速機用制御弁装置 | |
| JP2006516319A (ja) | 連続可変トランスミッション | |
| US11725724B2 (en) | Control system and method thereof for multispeed transmission | |
| JP5873814B2 (ja) | 流体供給装置及び変速機 | |
| CN108027056B (zh) | 车辆的滑行停止控制方法及控制装置 | |
| US6716128B2 (en) | Clutch and infinitely variable transmission | |
| RU2178109C2 (ru) | Система управления бесступенчато-регулируемой коробки передач | |
| US9242629B2 (en) | Driveline clutch variable clutch capacity reapply, shaping and lash management | |
| JP4941350B2 (ja) | 無段変速装置 | |
| JP3213976B2 (ja) | 無段変速機の油圧制御装置 | |
| US10975960B2 (en) | Dual clutch control system for integral torque converter and retarder and method thereof | |
| JP2005291486A (ja) | 無段変速装置 | |
| WO2005047738A1 (en) | Control of the line pressure in a multi-regime continuously variable transmission | |
| JP6834216B2 (ja) | 変速機の制御装置 | |
| JP6834218B2 (ja) | 変速機の制御装置 | |
| JP2000179669A (ja) | パワートレインの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050525 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050525 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071106 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20080206 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080214 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20080306 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080313 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080404 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080708 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20081008 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20081016 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20081110 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20081117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090407 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20090707 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090714 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20090807 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090814 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20091117 |