JP2005297640A - 電動アシスト自転車 - Google Patents
電動アシスト自転車 Download PDFInfo
- Publication number
- JP2005297640A JP2005297640A JP2004113341A JP2004113341A JP2005297640A JP 2005297640 A JP2005297640 A JP 2005297640A JP 2004113341 A JP2004113341 A JP 2004113341A JP 2004113341 A JP2004113341 A JP 2004113341A JP 2005297640 A JP2005297640 A JP 2005297640A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle speed
- brake
- rider
- motor
- bicycle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract 2
- 230000000763 evoking effect Effects 0.000 abstract 1
- 230000005540 biological transmission Effects 0.000 description 45
- 239000000725 suspension Substances 0.000 description 15
- 238000010248 power generation Methods 0.000 description 4
- 230000005484 gravity Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000149 penetrating effect Effects 0.000 description 2
- 229920003002 synthetic resin Polymers 0.000 description 2
- 239000000057 synthetic resin Substances 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000010008 shearing Methods 0.000 description 1
- 239000003381 stabilizer Substances 0.000 description 1
- 230000007103 stamina Effects 0.000 description 1
- 238000005728 strengthening Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 210000001364 upper extremity Anatomy 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images





Landscapes
- Regulating Braking Force (AREA)
Abstract
【課題】電動アシスト自転車において,車速が所定値以上になると,それを乗り手に感知させてブレーキ操作を喚起させ,またリアブレーキを自動的にも作動させて,車速の過上昇を防止する。
【解決手段】乗り手がペダル駆動により後輪10rを駆動するとき,ペダル負荷に応じて,乗り手の駆動力に加算されるアシスト動力を発生する電動機61を備えた電動アシスト自転車において,車速を検知する車速センサ97,速度警報ブザー98,リアブレーキ81を作動するブレーキモータ87,車速センサ97の検知信号に基づき速度警報ブザー98及びブレーキモータ87を作動する電子制御ユニット91を備え,車速が所定値以上になると,速度警報ブザー98及びブレーキモータ87を自動的に作動させる。
【選択図】 図10
【解決手段】乗り手がペダル駆動により後輪10rを駆動するとき,ペダル負荷に応じて,乗り手の駆動力に加算されるアシスト動力を発生する電動機61を備えた電動アシスト自転車において,車速を検知する車速センサ97,速度警報ブザー98,リアブレーキ81を作動するブレーキモータ87,車速センサ97の検知信号に基づき速度警報ブザー98及びブレーキモータ87を作動する電子制御ユニット91を備え,車速が所定値以上になると,速度警報ブザー98及びブレーキモータ87を自動的に作動させる。
【選択図】 図10
Description
本発明は,乗り手が後輪を駆動すべくペダル付きクランク軸を駆動するとき,ペダル負荷に応じて,乗り手の駆動力に加算されるアシスト動力を発生する電動機を備えた電動アシスト自転車に関し,特に,車速の過上昇を自動的に防ぐようにしたものに関する。
電動アシスト自転車は,例えば下記特許文献1に開示されるように,既に知られている。
特開平10−167160号公報
電動アシスト自転車は,一般型の自転車に比して車重が重いため,車速が出過ぎると,制動距離が長くなり,特に下り坂を下る場合にその傾向が強くなる。しかしながら,従来の電動アシスト自転車の制動は,乗り手のブレーキ操作にのみ依存している。
本発明は,かゝる事情に鑑みてなされたもので,車速が所定値以上になると,その状態を乗り手に感知させて,ブレーキ操作を喚起させると共に,自動的にもリアブレーキを作動させて,車速の過上昇を確実に防止し得るようにした電動アシスト自転車を提供することを目的とする。
上記目的を達成するために,本発明は,乗り手が後輪を駆動すべくペダル付きクランク軸を駆動するとき,ペダル負荷に応じて,乗り手の駆動力に加算されるアシスト動力を発生する電動機を備えた電動アシスト自転車であって,車速を検知する車速センサと,速度警報ブザーと,後輪を制動するリアブレーキを作動し得るブレーキモータと,車速センサの検知車速が所定値以上になったとき前記速度警報ブザー及びブレーキモータを作動させる制御ユニットとを備えたことを第1の特徴とする。
また本発明は,第1の特徴に加えて,前記警報ブザーの作動を開始する検知車速の所定値を,前記ブレーキモータの作動を開始する検知車速の所定値より低く設定したことを第2の特徴とする。
さらに本発明は,第1又は第2の特徴に加えて,乗り手のためのキャビンを画成する車体シェルを備えたことを第3の特徴とする。
本発明の第1の特徴によれば,走行中,例えば下り坂で車速が上昇して,所定値以上になると,制御ユニットが速度警報ブザーを鳴らして,乗り手にブレーキ操作を喚起させると共に,ブレーキモータを作動してリアブレーキを自動的に作動させるので,車重の重い電動アシスト自転車の車速の過上昇を確実に抑制することができて,急ブレーキ時の制動距離の増加を極力抑えることができる。
また本発明の第2の特徴によれば,車速の上昇時,制御ユニットは,ブレーキモータの作動に先行して,速度警報ブザーを鳴らすことになるから,乗り手は,速度警報ブザーの作動音により,ブレーキモータの自動作動を予期することができると共に,ブレーキ操作を積極的に促すことで,車速の過上昇を効果的に抑制することができる。
さらに本発明の第3の特徴によれば,電動アシスト自転車が車体シェルを装備することで,乗り手は車体シェルにより保護されることになり,寒中の屋外でも,風雨の中でも電動アシスト自転車を快適に運転することができる。その際,車体シェルの装備により車重が増加しても,ブレーキモータによる後輪のブレーキの自動作動により,電動アシスト自転車の車速の過上昇を確実に抑制して,急ブレーキ時の制動距離の増加を極力抑えることができる。
本発明の実施の形態を,図面に示す本発明の好適な実施例に基づき以下に説明する。
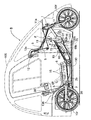
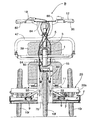
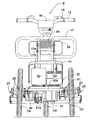
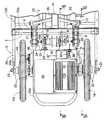
図1は本発明に係る三輪型電動アシスト自転車を,車体シェルを取り外した状態で示す側面図,図2は同正面図,図3は同背面図,図4は図1中の後輪懸架装置周辺部の平面図,図5は図4の5−5線断面図,図6は図4の6−6線断面図,図7は図4の7−7線断面図,図8は図5の8−8線断面図,図9は図8の9−9線断面図,図10は上記電動アシスト自転車の伝動装置の平面図,図11は図10中のクラッチを接続状態で示す要部縦断平面図,図12は同クラッチの遮断状態を示す平面図,図13は上記電動アシスト自転車の電気回路図,図14上記電動アシスト自転車に車体シェルを取り付けた状態を示す側面図,図15は上記車体シェルの斜視図,図16は図14の16−16線断面図,図17は図14の17−17線断面図,図18は図17の18−18線断面図,図19は図18の19−19線断面図,図20は図17中の床枠及び床板の分解斜視図である。
先ず,図1〜図3において,体力増進機能を持つ三輪型電動アシスト自転車Bの車体フレームFは,前部ヘッドパイプ1と,この前部ヘッドパイプ1から斜め下向きに延びる傾斜部2a及び,この傾斜部2aの後端から後方へ水平に延びる水平部2bからなるメインパイプ2と,前部ヘッドパイプ1からメインパイプ2の上方へ斜め後方に突出するハンドル支持パイプ3と,このハンドル支持パイプ3及び前記傾斜部2a間を連結する第1ステー4と,ハンドル支持パイプ3の後端部に固設される後部ヘッドパイプ5と,第1ステー4及び水平部2b間を連結する第2ステー6と,水平部2bの後端に直交して連結して水平に延びるクロスパイプ7とで構成される。そのクロスパイプ7には,その後面より突出する左右一対のブラケット8,8と,これらブラケット8,8の両外側でクロスパイプ7と直交してそれの前後に突出する左右一対の懸架腕9,9が溶接されている。
前部ヘッドパイプ1では,前輪10fを支持するフロントフォーク11の上端に一体に突設されたフォークステム11aが回転自在に支承され,後部ヘッドパイプ5では,操向ハンドル12に結合されたハンドルステム12aが回転自在に支承される。そしてフォークステム11aの上端部と,ハンドルステム12aの下端部とはリンク機構13を介して連結され,操向ハンドル12の回動をフロントフォーク11に伝達し得るようになっている。
前記クロスパイプ7における左右一対の懸架腕9,9の後端部には,左右一対の後輪10r,10rが後輪懸架装置Sを介して昇降可能に連結され,第2ステー6からメインパイプ2の水平部2bにかけてサドル15が取り付けられる。メインパイプ2の傾斜部2aの中間部には,左右両端にペダル16,16を備えたクランク軸17が回転自在に支承される。
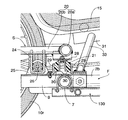
上記後輪懸架装置Sについて,図4〜図7を参照しながら説明する。
後輪懸架装置Sは,前記左右一対の懸架腕9,9の後端部に,左右方向水平に同軸配置される左右一対の枢軸26,26を介して上下揺動可能に連結されるスイングアーム20と,このスイングアーム20及びその下方の車体フレームF間に介装されるクッションブロック21,21とで構成される。
スイングアーム20は,開口部を後方に向けた平面視でコ字状の外側アーム部材20aと,この外側アーム部材20aの内側に配置され,開口部を前方に向けて両端部を外側アーム部材20aの前部に溶接した平面視でコ字状の内側アーム部材20bとからなっており,これら外側及び内側アーム部材20a,20bの互いに隣接するアーム部により左右一対のリアフォーク22,22が構成される。即ち,スイングアーム20は,左右のリアフォーク22,22を相互に一体的に連結して構成される。そしてリアフォーク22,22には,左右の後輪10r,10rのハブをそれぞれ回転自在に支承する車軸23,23が固着される。
内側アーム部材20bは,その前端に近接した部位に,下方に突出して同軸上に並ぶ左右一対の第1軸受部24,24を有する。また内側アーム部材20bの下方に配置される左右の懸架腕9,9は,その後端部に,上方に突出して第1軸受部24,24とそれぞれ軸方向に隣接する左右一対の第2軸受部25,25を有しており,各隣接する第1及び第2軸受部24,25は,前記枢軸26,26によって相対回転自在に連結され,これによってスイングアーム20は枢軸26,26周りに上下揺動可能となる。その際,各第1軸受部24及び第2軸受部25は,これらに支承される各枢軸26を左右の後輪10r,10rに挟まれる内側領域に位置させるように配置される。
各枢軸26の前方において,上下方向で互いに対向する内側アーム部材20b及び懸架腕9の各間にクッションブロック21が介装される。
各クッションブロック21は,開口部を下向きにしたコ字状の上部取り付け部材28と,この上部取り付け部材28を間に置いて起立部を互いに対向させる前後一対のL字状の下部取り付け部材29,29と,上部取り付け部材28及び両下部取り付け部材29,29間を弾性的に連結すべく,それらの前後方向対向面に焼き付けられる,ゴム等の弾性材からなるクッション部材30とからなっており,上部取り付け部材28は内側アーム部材20bの下面に,下部取り付け部材29,29は懸架腕9の上面にそれぞれボルト等により固着される。
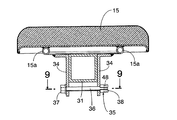
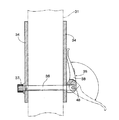
前記サドル15のメインパイプ2への取り付け構造について,図1,図5,図8及び図9を参照しながら説明する。
サドル15を支持する前後方向に延びる一本のサドルガイドレール31がメインパイプ2の水平部2b上方に配置される。このサドルガイドレール31は,その前端部下面から突出する一本の前部脚32と,その後端部側面から下方に突出する左右一対の後部脚33,33とを一体に備えており,その前部脚32は前記第2ステー6に,後部脚33,33は,前記左右一対の懸架腕9,9の前端部にそれぞれボルトにより固着される。こうして取り付けられるサドルガイドレール31は,前方上向きの勾配が付与される。
上記サドルガイドレール31は,図8に明示するように,断面方形の一本の各パイプで構成されており,その上面に,サドル15の底板に固着されるサドルフレーム15aが前後方向摺動可能に載置されると共に,そのサドルフレーム15aに固設された左右一対の挟持板34,34がサドルガイドレール31の両側面に前後摺動可能に配置される。これら挟持板34,34の下端部は,サドルガイドレール31の下方に突出しており,それらの下端部を締め具35により相互に締めつけることにより,サドル15はサドルガイドレール31に固定される。こうして固定されるサドル15の前方且つ上方に前記操向ハンドル12が配置され,また前記クランク軸17は,その回転軸線が操向ハンドル12の下方でサドル15の前方且つ上方にくるように配置される。
上記締め具35は,両挟持板34,34の下端部を左右に貫通する締めつけボルト36と,一方の挟持板34の下端部外側面に当接していて締めつけボルト36の先端が螺合される調節ナット37と,締めつけボルト36の基端部に,その直径方向の枢軸48を介して取り付けされるカムレバー38とからなっており,カムレバー38は,これを締めつけボルト36と直交する方向に倒すと両挟持板34,34間を緊締し,締めつけボルト36の軸方向に起こすと,両挟持板34に対する緊締を解除するようになっている。
図2,図3及び図5に示すように,サドル15の底板に固着したサドルフレーム15aは,サドル15の背面上方へ起立するように屈曲しており,その起立部に背当て39が上下調節可能に取り付けられる。またサドルフレーム15aには,背当て39の左右外側に突出する,パイプ製で長方形のグラブレール47が溶接等により結合される。このグラブレール47は,乗り手のサドル15への乗り降りや,電動アシスト自転車Bの手押し時に握られるものである。
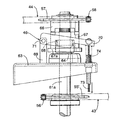
クランク軸17と後輪10rとの間を繋ぐ伝動装置Mについて,主として図10〜図12を参照しながら説明する。
伝動装置Mは,クランク軸17側から第1チェーン伝動装置41,第2チェーン伝動装置42,フリーホイール付きの多段変速機45,第3チェーン伝動装置43,発電・電動機61,クラッチ46及び第4チェーン伝動装置44を順次連ねて構成される。
第1チェーン伝動装置41は,クランク軸17に固設した第1駆動スプロケット50と,メインパイプ2の水平部2b(図1参照)前端部に回転自在に軸支される第1被動スプロケット50′とに第1チェーン51を巻き掛けて構成される。メインパイプ2には,第1チェーン51の緊張度合いから,クランク軸17に作用する負荷,即ちペダル負荷を検知するペダル負荷センサ60が取り付けられる。
第2チェーン伝動装置42は,第1被動スプロケット50′に隣接して前記伝動軸59に固設した第2駆動スプロケット52と,前記クロスパイプ7(図1参照)のブラケット8,8に取り付けられる変速機45の入力軸45aに固設した第2被動スプロケット52′とに第2チェーン53を巻き掛けて構成される。
変速機45は,互いに同軸に配置される入力軸45a及び出力軸45bと,これら入力軸45a及び出力軸45b間を連結し得る複数段の変速ギヤ列と,入力軸45aから出力軸45b側への一方向へのみ伝動を可能にするフリーホイールとを内蔵している。そのフリーホイールはクランク軸17への逆負荷を遮断するものであるから,第1チェーン伝動装置41又は第2チェーン伝動装置42に設けることもできる。
第3チェーン伝動装置43は,変速機45の出力軸45bに固設した第3駆動スプロケット55と,スイングアーム20に取り付けられた発電・電動機61のロータ軸61aに固設した第3被動スプロケット55′とに第3チェーン56を巻き掛けると共に,この第3チェーン56にテンショナ62により弾発的に張りを与えて構成される。上記テンショナ62は,変速機45の出力軸45a及び発電・電動機61のロータ軸61aの何れか一方をスイングアーム20の枢軸26,26と同軸に配置する場合には,これを省略することができる。
前記クラッチ46は,スイングアーム20に固定されて,発電・電動機61のロータ軸61aの中間部を回転自在に支承するブラケット63と,このブラケット63の外側面に隣接してロータ軸61aに軸方向移動不能に取り付けられる円筒状のリテーナ64と,ロータ軸61aの先端部に軸受ブッシュ65を介して回転自在且つ軸方向移動不能に取り付けられる固定ドグクラッチ部材66と,リテーナ64及び固定ドグクラッチ部材66間でロータ軸61aに摺動可能にスプライン嵌合して,固定ドグクラッチ部材66に係脱し得る可動ドグクラッチ部材67と,リテーナ64及び可動ドグクラッチ部材67間に縮設されて可動ドグクラッチ部材67を固定ドグクラッチ部材66との係合方向に付勢するクラッチばね68とを備えている。可動ドグクラッチ46の後端部は,リテーナ64の外周面にも摺動可能に嵌合しており,その後端部外周にはフランジ67aが形成されている。ブラケット63の外側面に立設された支柱69には,可動ドグクラッチ部材67を囲繞して,そのフランジ67aの前面に当接可能に対向する環状のレリーズレバー70の基端部がピボット軸71により取り付けられる。レリーズレバー70の先端部には,操向ハンドル12又はその近傍の車体フレームFに軸支されたクラッチレバー72に連なるクラッチワイヤ73が接続される。またこのレリーズレバー70とブラケット63間には,レリーズレバー70を可動ドグクラッチ部材67を固定ドグクラッチ部材66側に付勢する戻しばね74が縮設される。
クラッチレバー72は,通常,クラッチワイヤ73を緩めたオン位置に置かれており,したがってレリーズレバー70は戻しばね74及びクラッチばね68の付勢力により固定ドグクラッチ部材66との係合位置に保持されることで,ロータ軸61aの回転を可動ドグクラッチ部材67を経て固定ドグクラッチ部材66に伝達することを可能にする。即ちクラッチ46は接続状態にある。一方,クラッチレバー72をオフ位置に操作してクラッチワイヤ73を牽引すると,レリーズレバー70がフランジ67aを押圧して可動ドグクラッチ部材67を固定ドグクラッチ部材66から引き離することで,ロータ軸61aから固定ドグクラッチ部材66への伝動を遮断する。即ちクラッチ46は遮断状態となる。
第4チェーン伝動装置44は,前記固定ドグクラッチ部材66に一体的に形成された第4駆動スプロケット57と,左右何れか一方の後輪10r,図示例では左側の後輪10rのハブに結合した第4被動スプロケット57′との第4チェーン58を巻き掛けて構成される。したがって,クラッチ46の接続及び遮断により,ロータ軸61a及び第4駆動スプロケット57間の接続及び遮断が制御される。
第1チェーン伝動装置41の全体及び第2チェーン伝動装置42の前半部は,メインパイプ2に固着されるチェーンカバー75(図1及び図16参照)によって覆われる。したがってサドル15に座った乗り手は,第1及び第2上記チェーン伝動装置Mへの接触から保護される。
ブレーキ装置について,図2,図4及び図10により説明する。
前輪10fには,これを制動するキャリパ式のフロントブレーキ80が,また第4チェーン伝動装置44と反対側の後輪10rには,これを制動するドラム式のリアブレーキ81がそれぞれ設けられる。フロントブレーキ80の作動部には,操向ハンドル12に右グリップに隣接して取り付けられたフロントブレーキレバー82と,メインパイプ2の前部に取り付けられたパーキングレバー83とが,第1ブレーキワイヤ84及び第2ブレーキワイヤ85をそれぞれ介して接続される。したがって,フロントブレーキレバー82及びパーキングレバー83の何れか一方を操作することにより,フロントブレーキ80を作動することができる。
またリアブレーキ81の作動部には,操向ハンドル12に左グリップに隣接して取り付けられたリアブレーキレバー86と,スイングアーム20に取り付けられたブレーキモータ87の作動レバー87aとに第3ブレーキワイヤ88及び第4ブレーキワイヤ89をそれぞれ介して接続される。したがって,リアブレーキレバー86を操作し,又はブレーキモータ87を作動することによりリアブレーキ81を作動することができる。
尚,図2及び図10中,符号18は変速機45の切り換えのためのシフトレバーである。
図13において,体力増進機能を持つ電動アシスト自転車Bの電気回路について説明する。
バッテリ90及び発電・電動機61間には,電力の授受を切り換えるモード切換駆動回路91が介装される。電子制御回路装置99は,モード切換駆動回路91を制御する主制御回路99a及び,操作盤96上のスイッチ及び表示器類との間で信号の授受を行いながら主制御回路99aの作動を補助する副制御回路99bとからなっている。
操作盤96に設けられるスイッチ及び表示器類を具体的に挙げると,モード切換駆動回路91を電動アシストモードと充電モードとに切り換えるアシスト・充電切換スイッチ92,このモード切換駆動回路91の充電モード時,発電・電動機61からバッテリ90への充電量を調節することによりペダル負荷を調節するためのペダル負荷調節ダイヤル93,バッテリ90の電力残量を表示する複数の電力残量表示ランプ94,バッテリ90の電力残量が規定値以下に低下した場合,発電・電動機61からバッテリ90への強制充電が行われる状態を示す強制充電表示ランプ95等である。操作盤96は,操向ハンドル12の中央部に取り付けられる。
また主制御回路99aには前記ペダル負荷センサ60の出力信号が入力され,アシスト走行時,バッテリ90から発電・電動機61への給電量をペダル負荷に応じて制御するようになっている。
さらに主制御回路99aには,前輪10f又は後輪10rの回転速度を車速として検知する車速センサ97の出力信号が入力され,車速が比較的高速の第1所定値を超えたと主制御回路99aが判別したときは,主制御回路99aが速度警報ブザー98を作動し,車速が第1所定値より高い第2所定値を超えたと主制御回路99aが判別したときは,主制御回路99aが前記ブレーキモータ87を作動して第4ブレーキワイヤ89を牽引し,リアブレーキ81を自動的に作動させるようになっている。
前記モード切換駆動回路91及び主制御回路99aは,同一の基板上に構成されて電気回路組立体103をなすもので,それは図3〜図5に示すように,左右の後輪10r,10r間において,バッテリ90と共に,スイングアーム20上に弾性部材を介して取り付けられる。
一方,副制御回路99bは,メインパイプ2の傾斜部2a側面(図1参照)に取り付けられる。この副制御回路99bは,前記チェーンカバー75で覆われるように配置される。
尚,速度警報ブザー98の取り付け場所は任意であるが,例えば図3に示すように背当て39の背面に取り付けられば,デッドスペースの利用と共に,乗り手に警報音を確実に聞かせることができて好都合である。
発電・電動機61の(+)側端子と(−)側端子との間には,後退ブレーキ回路100が接続される。この後退ブレーキ回路100は,上記端子間を接続する電路101にダイオード102を挿入して構成され,ダイオード102は,(−)側端子から(+)側端子への電流の流れを許容するようになっている。
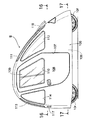
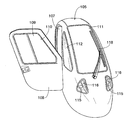
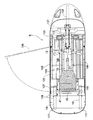
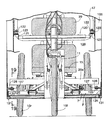
図14〜図20において,車体フレームFには,電動アシスト自転車B全体を上方から覆う合成樹脂(例えばFRP,ABS)製の車体シェル105が取り付けられ,その内部は,乗り手を収容するキャビン106となる。この車体シェル105は,下面を開放した流線型をなしており,その両側壁には,乗降口107,107が設けられると共に,これら乗降口107,107を開閉するドア108,108の前端部が軸支される。各ドア108も合成樹脂製であって,スライド透明板109により開閉可能のサイドウィンド110を有する。また車体シェル105には,それぞれ透明シールド板が嵌め込まれるフロントウィンド111,左右のフロントクォータウインド112,リアウインド113,左右のリアクォータウインド114が設けられ,またフロントウインド111のシールド板面を払拭するためのワイパ118が装備される。さらに車体シェル105の前部にはヘッドライト115及び左右のウインカランプ116,116が,後部には左右のウインカランプ117,117がそれぞれ装備される。
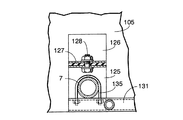
車体フレームFへの車体シェル105の取り付けのために,前部ヘッドパイプ1には,その左右外側方に突出した支持杆120が固設され,この支持杆120は,その両端にL字状の前部連結部材121,121を備えている。また前記クロスパイプ7の左右両端にはL字状の後部連結部材125,125が設けられる。そして前部連結部材121,121には,車体シェル105前部の左右内壁固設されたL字状の前部連結部材122,122が弾性部材123を挟んでボルト結合され,また後部連結部材125,125には,車体シェル105後部の左右内壁固設されたL字状の後部連結部材126,126が弾性部材123を挟んでボルト128により結合される。こうして車体シェル105は車体フレームFに取り付けられ,車体フレームF及び車体シェル105間の振動を弾性部材123,127に吸収させるようになっている。
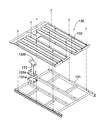
また車体フレームFには,車体シェル105の開放下面の中央部を閉じるように,床130が取り付けられる。この床130は,格子状の床枠131と,左右に分割されて床枠131の上面に接合される床板132とからなっている。床枠131の前端部上面には床板132を貫通する支柱133が立設される。その際,支柱133は,その下端に形成した連結フランジ133aが床枠131の前端部上面に固設した下部フランジ131aにボルト結合される。また支柱133は,その上端に形成した上部フランジ133bが前記メインパイプ2の傾斜部2aに固設したブラケット134(図1参照)にボルト結合される。また床枠131の左右後端部は,前記クロスパイプ7の左右両端部にUボルト135(特に図19参照)を介して固着される。床板132には,前記チェーンカバー75との干渉を回避する切欠き136が設けられている。こうして床は,車体フレームFに取り外し可能に固着される。
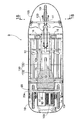
さらに床板132の前端部と車体シェル105の内壁には,図1に明示するように,前輪10fの上部及び背面を覆って車体シェル105の開放下面の前部を閉じるフロントカバー137が着脱可能に連結され,また床板132の後端部と車体シェル105の内壁には,左右の後輪10r,10rの他,バッテリ90及び電気回路組立体103を上方から覆って車体シェル105の開放下面の後部を閉じるリアカバー138が着脱可能に連結される。
こうして車体シェル105内のキャビン106は,床130,フロントカバー137及びリアカバー138によって略密閉状態にされるので,キャビン106への風雨の浸入を防ぐことができ,したがって冬季でも,乗り手を寒さから保護することができる。またフロントカバー137及びリアカバー138の一方,若しくは両方,又は床130及び両カバー137,138の全部を取り外すことにより,走行風を車体シェル105の下方からキャビン106に適度に取り入れることができ,夏季でも爽快な運転が可能である。また後輪10r,10rを覆うリアカバー138がバッテリ90及び電気回路組立体103を覆うカバーを兼用することになるから,バッテリ90及び電気回路組立体103専用のカバーは不要であり,簡単な構造でキャビン106内の体裁を整えることができる。
次に,この実施例の作用について説明する。
[電動アシスト走行]
先ずクラッチ操作レバー72をオン位置にセットしてクラッチ46を接続状態にし,次いでアシスト・充電切換スイッチ92をアシスト側に切り換える。すると,モード切換駆動回路91は電子制御回路装置99により電動アシストモードとされるので,発電・電動機61は,ペダル負荷に応じてバッテリ90から給電されるようになる。そこで,乗り手がペダル16,16を駆動すれば,その駆動力は,第1チェーン伝動装置41,第2チェーン伝動装置42,変速機45,第3チェーン伝動装置43,ロータ軸61a,クラッチ46及び第4チェーン伝動装置44を順次経て後輪10rに伝達する。その際,電子制御回路装置99は,ペダル負荷センサ60から入力されるペダル負荷信号に応じてバッテリ90から発電・電動機61への給電量を制御するので,発電・電動機61は,ペダル負荷に応じた動力をロータ軸61aから発生して伝動装置Mに伝達し,乗り手の駆動力に加算することになり,乗り手はペダル16,16を介してクランク軸17を軽快に駆動して,電動アシスト自転車Bを走行させることができる。
[車速制御]
走行中,例えば下り坂で車速が上昇して,第1所定値を超えると電子制御回路装置99が速度警報ブザー98を鳴らして,乗り手にブレーキ操作を喚起させ,更に車速が上昇して第1所定値より高い第2所定値を超えると,電子制御回路装置99はブレーキモータ87を作動してリアブレーキ81を自動的に作動させるので,車重の重い車体シェル105付きの電動アシスト自転車Bでも,その車速の過上昇を確実に抑制することができて,急ブレーキ時の制動距離の増加を極力抑えることができる。
[電動アシスト走行]
先ずクラッチ操作レバー72をオン位置にセットしてクラッチ46を接続状態にし,次いでアシスト・充電切換スイッチ92をアシスト側に切り換える。すると,モード切換駆動回路91は電子制御回路装置99により電動アシストモードとされるので,発電・電動機61は,ペダル負荷に応じてバッテリ90から給電されるようになる。そこで,乗り手がペダル16,16を駆動すれば,その駆動力は,第1チェーン伝動装置41,第2チェーン伝動装置42,変速機45,第3チェーン伝動装置43,ロータ軸61a,クラッチ46及び第4チェーン伝動装置44を順次経て後輪10rに伝達する。その際,電子制御回路装置99は,ペダル負荷センサ60から入力されるペダル負荷信号に応じてバッテリ90から発電・電動機61への給電量を制御するので,発電・電動機61は,ペダル負荷に応じた動力をロータ軸61aから発生して伝動装置Mに伝達し,乗り手の駆動力に加算することになり,乗り手はペダル16,16を介してクランク軸17を軽快に駆動して,電動アシスト自転車Bを走行させることができる。
[車速制御]
走行中,例えば下り坂で車速が上昇して,第1所定値を超えると電子制御回路装置99が速度警報ブザー98を鳴らして,乗り手にブレーキ操作を喚起させ,更に車速が上昇して第1所定値より高い第2所定値を超えると,電子制御回路装置99はブレーキモータ87を作動してリアブレーキ81を自動的に作動させるので,車重の重い車体シェル105付きの電動アシスト自転車Bでも,その車速の過上昇を確実に抑制することができて,急ブレーキ時の制動距離の増加を極力抑えることができる。
特に,ブレーキモータ87の作動に先行して速度警報ブザー98を鳴らすことは,乗り手にブレーキモータ87の自動作動を予期させると共に,ブレーキ操作を積極的促すことなるから,車速の過上昇抑制に有効である。
[体力増進走行トレーニング]
クラッチ操作レバー72は,上記の場合と同様にオン位置にセットしてクラッチ46を接続状態にしておき,アシスト・充電切換スイッチ92は充電側に切り換える。すると,モード切換駆動回路91は電子制御回路装置99により充電モードとされるので,発電・電動機61は,逆負荷を受けると発電してバッテリ90に充電し得るようになる。そこで,乗り手がペダル16,16を介してクランク軸17を駆動すれば,その駆動力は,第1チェーン伝動装置41,第2チェーン伝動装置42,変速機45,第3チェーン伝動装置43,ロータ軸61a,クラッチ46及び第4チェーン伝動装置44を順次経て後輪10rに伝達し,それを駆動すると同時に,上記ロータ軸61aの回転により発電・電動機61は発電状態となって,バッテリ90に充電する。その発電に伴い発生する負荷が乗り手のペダル負荷に加えられることで,乗り手は,自転車Bを走行させながら体力増進トレーニングを行い,同時にバッテリ90への充電を果たすことができる。この場合,ペダル負荷調節ダイヤル93を強弱何れかの方向に回転すると,それに応じて発電・電動機61からバッテリ90への充電量が増減制御され,それによってペダル負荷の強弱を自由に調節することができるので,乗り手の体力や疲労度などに応じてペダル負荷を自由に調節し,トレーニングを無理なく快適に行うことができる。
[後退加速の抑制]
[電動アシスト走行]又は[体力増進走行トレーニング]の何れの場合でも,上り坂で乗り手の脚力が弱く,電動アシスト自転車Bが後退し始めると,発電・電動機61のロータ軸61aを逆転されることで,発電・電動機61が発生する電圧により(+)側端子が(−)に,(−)側端子が(+)に極性を反転するため,後退ブレーキ回路100では,ダイオード102が導通状態となり,したがって発電・電動機61は電気的に短絡状態となって大きなブレーキトルクを発生し,これによって電動アシスト自転車Bの後退加速を効果的に抑制することができる。この実施例の後退ブレーキ回路100では,電動アシスト自転車Bの後退時,その後退を特別に検知するセンサを用いずに,発電・電動機61を電気的に短絡状態にすることができるから,構成が極めて簡単である。
[体力増進定置トレーニング]
先ず,パーキングレバー83を作動してフロントブレーキ80を作動状態にすると共に,クラッチレバー72をオフ位置に操作してクラッチ46を遮断状態にし,またアシスト・充電切換スイッチ92を充電側に切り換える。すると,[体力増進走行トレーニング]の場合と同様に,モード切換駆動回路91は電子制御回路装置99により充電モードとされるので,発電・電動機61は,逆負荷を受けると発電してバッテリ90に充電し得るようになる。そこで,乗り手がペダル16,16を介してクランク軸17を駆動すれば,その駆動力は,第1チェーン伝動装置41,第2チェーン伝動装置42,変速機45及び第3チェーン伝動装置43を経てロータ軸61aに伝達するが,クラッチ46の遮断により,第4チェーン伝動装置44への伝達は行われない。したがって後輪10rを停止したまゝで,ペダル16,16の駆動により発電・電動機61に逆負荷を加えることになるから,発電・電動機61は発電状態となって,バッテリ90に充電する。その発電に伴い発生する負荷が乗り手のペダル負荷に加えられることで,乗り手は体力増進トレーニングを行い,同時にバッテリ90への充電を果たすことができる。この場合もペダル負荷調節ダイヤル93を強弱何れかの方向に回転すると,それに応じて発電・電動機61からバッテリ90への充電量が増減制御され,それによってペダル負荷の強弱を自由に調節することができるので,この場合も乗り手の体力や疲労度などに応じてペダル負荷を自由に調節し,トレーニングを無理なく快適に行うことができる。
[体力増進走行トレーニング]
クラッチ操作レバー72は,上記の場合と同様にオン位置にセットしてクラッチ46を接続状態にしておき,アシスト・充電切換スイッチ92は充電側に切り換える。すると,モード切換駆動回路91は電子制御回路装置99により充電モードとされるので,発電・電動機61は,逆負荷を受けると発電してバッテリ90に充電し得るようになる。そこで,乗り手がペダル16,16を介してクランク軸17を駆動すれば,その駆動力は,第1チェーン伝動装置41,第2チェーン伝動装置42,変速機45,第3チェーン伝動装置43,ロータ軸61a,クラッチ46及び第4チェーン伝動装置44を順次経て後輪10rに伝達し,それを駆動すると同時に,上記ロータ軸61aの回転により発電・電動機61は発電状態となって,バッテリ90に充電する。その発電に伴い発生する負荷が乗り手のペダル負荷に加えられることで,乗り手は,自転車Bを走行させながら体力増進トレーニングを行い,同時にバッテリ90への充電を果たすことができる。この場合,ペダル負荷調節ダイヤル93を強弱何れかの方向に回転すると,それに応じて発電・電動機61からバッテリ90への充電量が増減制御され,それによってペダル負荷の強弱を自由に調節することができるので,乗り手の体力や疲労度などに応じてペダル負荷を自由に調節し,トレーニングを無理なく快適に行うことができる。
[後退加速の抑制]
[電動アシスト走行]又は[体力増進走行トレーニング]の何れの場合でも,上り坂で乗り手の脚力が弱く,電動アシスト自転車Bが後退し始めると,発電・電動機61のロータ軸61aを逆転されることで,発電・電動機61が発生する電圧により(+)側端子が(−)に,(−)側端子が(+)に極性を反転するため,後退ブレーキ回路100では,ダイオード102が導通状態となり,したがって発電・電動機61は電気的に短絡状態となって大きなブレーキトルクを発生し,これによって電動アシスト自転車Bの後退加速を効果的に抑制することができる。この実施例の後退ブレーキ回路100では,電動アシスト自転車Bの後退時,その後退を特別に検知するセンサを用いずに,発電・電動機61を電気的に短絡状態にすることができるから,構成が極めて簡単である。
[体力増進定置トレーニング]
先ず,パーキングレバー83を作動してフロントブレーキ80を作動状態にすると共に,クラッチレバー72をオフ位置に操作してクラッチ46を遮断状態にし,またアシスト・充電切換スイッチ92を充電側に切り換える。すると,[体力増進走行トレーニング]の場合と同様に,モード切換駆動回路91は電子制御回路装置99により充電モードとされるので,発電・電動機61は,逆負荷を受けると発電してバッテリ90に充電し得るようになる。そこで,乗り手がペダル16,16を介してクランク軸17を駆動すれば,その駆動力は,第1チェーン伝動装置41,第2チェーン伝動装置42,変速機45及び第3チェーン伝動装置43を経てロータ軸61aに伝達するが,クラッチ46の遮断により,第4チェーン伝動装置44への伝達は行われない。したがって後輪10rを停止したまゝで,ペダル16,16の駆動により発電・電動機61に逆負荷を加えることになるから,発電・電動機61は発電状態となって,バッテリ90に充電する。その発電に伴い発生する負荷が乗り手のペダル負荷に加えられることで,乗り手は体力増進トレーニングを行い,同時にバッテリ90への充電を果たすことができる。この場合もペダル負荷調節ダイヤル93を強弱何れかの方向に回転すると,それに応じて発電・電動機61からバッテリ90への充電量が増減制御され,それによってペダル負荷の強弱を自由に調節することができるので,この場合も乗り手の体力や疲労度などに応じてペダル負荷を自由に調節し,トレーニングを無理なく快適に行うことができる。
この場合,自転車Bは,パーキングレバー83の作動より定置状態に保持され,しかも前輪10fを一輪,後輪10rを二輪とした三輪車であって,特別なスタンド装置を用いることなく自立が可能であるから,自宅の車庫や庭先など設置場所を選ばず,体力増進のための定置型トレーニング装置として安全に使用することができ,しかも乗り手の運動エネルギはバッテリに充電される電力に変換されることになるから,エネルギの無駄がない。
また乗り手を収容するキャビン106は,車体シェル105,床130,フロントカバー137及びリアカバー138によりキャビン106への風雨の浸入を防いで乗り手を保護し,しかも自立可能の三輪型自転車Bでは,乗り手は停車時でも足を路面に接地させる必要はなく,足を風雨に曝すこともないから,天候の如何に拘らず,快適な走行及びトレーニングが可能である。
さらに乗り手は,ドア108の開放により,自動車と同様感覚で乗降口107からキャビン106への乗降を行うことができる。
ところで,このような体力増進機能を持つ三輪型アシスト自転車Bにおいて,後輪10r,10rの上面より下方に配置された背当て39付きのサドル15の前方且つ上方に前記操向ハンドル12が配置され,またこの操向ハンドル12の下方でサドル15の前方且つ上方にクランク軸17の軸線が配置されるので,乗り手がサドル15に座った状態での電動アシスト自転車Bの重心を充分に下げることができ,これに伴ない比較的重量が重い車体シェル105の高さを充分に下げることが可能となり,したがって三輪型自転車Bの重心を充分に下げ得て,運転の安定性を高めることができる。
またサドル15及びクランク軸17の上記配置により,乗り手は,クランク軸17を駆動するにはペダル16,16を前方に押し出すことになるから,体重の軽重に関係なく脚力をペダル16,16に効率良く伝達し得て,腰や脚の強化のためのトレーニングを合理的に行うことができる。
その際,サドル15の締め具35を緩めて,サドル15をサドルガイドレール31に沿って前後に摺動させれば,サドルガイドレール31が前述のように前方上向きに傾斜していることから,サドル15及び操向ハンドル12間の前後方向間隔と上下方向間隔のみならず,サドル15及びクランク軸17軸線間の前後方向間隔と上下方向間隔を同時に増減調節することができる。例えばサドル15をサドルガイドレール31に沿って前方へ摺動させたときは,サドル15及び操向ハンドル12間の前後方向間隔と上下方向間隔,並びにサドル15及びクランク軸17間の前後方向間隔と上下方向間隔を同時に狭めることができるから,したがって乗り手の異なる体格に的確に対応させることができ,良好な操縦性を確保することができる。
サドル15の上記調節後は,締め具35を締めつける。この締めつけによれば,左右の挟持板34,34が断面方形のサドルガイドレール31の両側面に圧接することで,サドル15のサドルガイドレール31に対する摺動は勿論,サドルガイドレール31の軸線周りの回転を阻止し,その固定を簡単,確実に行うことができる。特に,サドルガイドレール31を一本の角パイプで構成して,サドル15の回転を阻止するものであるから,部品点数の削減と軽量化に大いに寄与し得る。
クラッチ46の遮断状態では,フロントブレーキ80及びリアブレーキ81を全て非作動状態にすれば,手押しにより電動アシスト自転車Bの前進及び後退を,発電・電動機61に抵抗されることなく,自由に行うことができ,取り回し性が良好である。
後輪懸架装置Sにおいては,車体フレームF又は後輪10r,10rに加わる上下方向の荷重が変化したとき,懸架腕9,9に対してスイングアーム20が枢軸26,26周りに上下揺動するので,各クッションブロック21において,上部取り付け部材28及び下部取り付け部材29,29が相互に上下動して,クッション部材30に剪断方向の弾性変形を与える。そのときクッション部材30に発生する剪断応力により車体フレームF又は後輪10r,10rに加わる上下方向の荷重は支持され,また後輪10r,10rの上下振動はクッション部材30の剪断変形により効果的に吸収されることになり,これにより乗り手に良好な乗り心地を与えることができる。
また左右の後輪10r,10rの車軸23,23は互いに分離独立してはいるが,これら車軸23,23をそれぞれ支持する左右のリアフォーク22,22は,互いに一体に連結されているから,各後輪10r,10rの単独上下動を抑制するスタビライザとして機能することができる。したがって,旋回走行時,車体フレームF系に働く遠心力に起因して,外輪側の後輪10rが対応するクッションブロック21のクッション部材30を変形させながら車体フレームFに対して相対的に上昇するときでも,内輪側の後輪10rも同時に上昇させることになり,自転車Bは安定した旋回姿勢を維持することができる。また左右のリアフォーク22,22の左右の枢軸26,26は,左右の後輪10r,10r間の内側領域に配置されるので,枢軸26,26の設置によるも,自転車Bの全長及び横幅の増加を抑えることができ,自転車Bのコンパクト化に寄与し得る。さらにクッションブロック21,21の取り付け部においては,リアフォーク22,22の下方に車体フレームF後端部の懸架腕9,9が配置されるので,その車体フレームF上には,後輪10r,10rに隣接して,後輪10r,10rの上面より下方でサドル15を容易に設置することができ,自転車Bの低重心化を効果的に図ることができる。
本発明は,上記実施例に限定されるものではなく,その要旨を逸脱しない範囲で種々の設計変更が可能である。例えば,電動アシスト自転車Bは,前輪10fを二輪,後輪10rを一輪とした,自立可能の三輪車とすることもできる。また前後輪10r,10r何れも一輪とした電動アシスト自転車の場合には,[体力増進定置トレーニング]時,自立のための特別なスタンド装置を採用すればよい。また図13中のダイオード102に代えて,サイリスタ,IGBT,FETその他の半導体を用いることができる。
B・・・・・電動アシスト自転車
10r・・・後輪
61・・・・電動機
81・・・・リアブレーキ
87・・・・ブレーキモータ
91・・・・制御ユニット
97・・・・車速センサ
98・・・・ブザー
105・・・車体シェル
106・・・キャビン
10r・・・後輪
61・・・・電動機
81・・・・リアブレーキ
87・・・・ブレーキモータ
91・・・・制御ユニット
97・・・・車速センサ
98・・・・ブザー
105・・・車体シェル
106・・・キャビン
Claims (3)
- 乗り手が後輪(10r)を駆動すべくペダル(16)付きクランク軸(17)を駆動するとき,ペダル負荷に応じて,乗り手の駆動力に加算されるアシスト動力を発生する電動機(61)を備えた,電動アシスト自転車において,
車速を検知する車速センサ(97)と,速度警報ブザー(98)と,後輪(10r)を制動するリアブレーキ(81)を作動し得るブレーキモータ(87)と,車速センサ(97)の検知車速が所定値以上になったとき前記速度警報ブザー(98)及びブレーキモータ(87)を作動させる制御ユニット(91)とを更に備えたことを特徴とする,電動アシスト自転車。 - 請求項1記載の電動アシスト自転車において,
前記速度警報ブザー(98)の作動を開始する検知車速の所定値を,前記ブレーキモータ(87)の作動を開始する検知車速の設定値より低く設定したことを特徴とする,電動アシスト自転車。 - 請求項1又は2記載の電動アシスト自転車において,
乗り手のためのキャビン(106)を画成する車体シェル(105)を備えたことを特徴とする,電動アシスト自転車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004113341A JP2005297640A (ja) | 2004-04-07 | 2004-04-07 | 電動アシスト自転車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004113341A JP2005297640A (ja) | 2004-04-07 | 2004-04-07 | 電動アシスト自転車 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005297640A true JP2005297640A (ja) | 2005-10-27 |
Family
ID=35329731
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004113341A Pending JP2005297640A (ja) | 2004-04-07 | 2004-04-07 | 電動アシスト自転車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005297640A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012179987A (ja) * | 2011-02-28 | 2012-09-20 | Honda Motor Co Ltd | 鞍乗り型電動車両の車両接近告知装置 |
| EP2505465A1 (en) | 2011-03-31 | 2012-10-03 | Honda Motor Co., Ltd. | Motor-assisted bicycle |
| CN105253237A (zh) * | 2015-10-06 | 2016-01-20 | 杨小平 | 能提示调速转把扭转角接近动力起控角的电动车 |
| US9242599B2 (en) | 2011-02-28 | 2016-01-26 | Honda Motor Co., Ltd | Vehicle approach alert device for saddle-ridden electric vehicle |
| CN106542029A (zh) * | 2016-12-08 | 2017-03-29 | 中国科学院心理研究所 | 一种老年智能代步车 |
| GB2541800B (en) * | 2015-07-23 | 2021-04-14 | Ford Global Tech Llc | Bicycle stability control methods and systems |
-
2004
- 2004-04-07 JP JP2004113341A patent/JP2005297640A/ja active Pending
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012179987A (ja) * | 2011-02-28 | 2012-09-20 | Honda Motor Co Ltd | 鞍乗り型電動車両の車両接近告知装置 |
| US9242599B2 (en) | 2011-02-28 | 2016-01-26 | Honda Motor Co., Ltd | Vehicle approach alert device for saddle-ridden electric vehicle |
| EP2505465A1 (en) | 2011-03-31 | 2012-10-03 | Honda Motor Co., Ltd. | Motor-assisted bicycle |
| JP2012210854A (ja) * | 2011-03-31 | 2012-11-01 | Honda Motor Co Ltd | 電動アシスト自転車 |
| US8505666B2 (en) | 2011-03-31 | 2013-08-13 | Honda Motor Co., Ltd. | Motor-assisted bicycle |
| GB2541800B (en) * | 2015-07-23 | 2021-04-14 | Ford Global Tech Llc | Bicycle stability control methods and systems |
| CN105253237A (zh) * | 2015-10-06 | 2016-01-20 | 杨小平 | 能提示调速转把扭转角接近动力起控角的电动车 |
| CN106542029A (zh) * | 2016-12-08 | 2017-03-29 | 中国科学院心理研究所 | 一种老年智能代步车 |
| WO2018103455A1 (zh) * | 2016-12-08 | 2018-06-14 | 中国科学院心理研究所 | 一种老年智能代步车 |
| CN106542029B (zh) * | 2016-12-08 | 2019-01-29 | 中国科学院心理研究所 | 一种老年智能代步车 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005297639A (ja) | 体力増進機能を持つ電動アシスト自転車 | |
| CN100335354C (zh) | 电动辅助自行车的显示器 | |
| JPH04358988A (ja) | 電動モータ付き自転車 | |
| JP2001199378A (ja) | 電動補助自転車 | |
| JP2005297640A (ja) | 電動アシスト自転車 | |
| JP2003104277A (ja) | 電動補助自転車の回生制御装置 | |
| JP3154330B2 (ja) | 電動補助自転車の駆動力補助装置 | |
| JP2005297641A (ja) | 三輪型電動アシスト自転車 | |
| JP2005297643A (ja) | 三輪型電動アシスト自転車 | |
| JP2005313694A (ja) | 体力増進機能を持つ電動アシスト自転車 | |
| JP2006111103A (ja) | 自転車 | |
| JPH04358985A (ja) | 小型電動車両 | |
| JP2005297642A (ja) | 体力増進機能を持つ電動アシスト自転車 | |
| JP2005297638A (ja) | 三輪型電動アシスト自転車における後輪懸架装置 | |
| JPH08142966A (ja) | パワーアシスト三輪自転車 | |
| JP2001213383A (ja) | 電動補助自転車 | |
| JP3009368B2 (ja) | 電動自転車 | |
| KR200301491Y1 (ko) | 카트형 3륜 자전거 | |
| KR20150041915A (ko) | 전동식 자전거 | |
| JP3710906B2 (ja) | 補助動力付き車両 | |
| JPH05105146A (ja) | 電動機付き二輪車 | |
| JP3476566B2 (ja) | パワーアシスト三輪自転車 | |
| JP3274226B2 (ja) | 駆動力補助装置 | |
| JP2006142862A (ja) | 三輪型自転車 | |
| CN215399172U (zh) | 辅助轮式自行车助力器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061108 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070320 |