JP2005292944A - 移動体の制御システム - Google Patents
移動体の制御システム Download PDFInfo
- Publication number
- JP2005292944A JP2005292944A JP2004103650A JP2004103650A JP2005292944A JP 2005292944 A JP2005292944 A JP 2005292944A JP 2004103650 A JP2004103650 A JP 2004103650A JP 2004103650 A JP2004103650 A JP 2004103650A JP 2005292944 A JP2005292944 A JP 2005292944A
- Authority
- JP
- Japan
- Prior art keywords
- risk
- target
- state quantity
- control system
- probability
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/22—Safety or indicating devices for abnormal conditions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1401—Introducing closed-loop corrections characterised by the control or regulation method
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0218—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterised by the fault detection method dealing with either existing or incipient faults
- G05B23/0243—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterised by the fault detection method dealing with either existing or incipient faults model based detection method, e.g. first-principles knowledge model
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1401—Introducing closed-loop corrections characterised by the control or regulation method
- F02D2041/1433—Introducing closed-loop corrections characterised by the control or regulation method using a model or simulation of the system
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
- Testing And Monitoring For Control Systems (AREA)
- Safety Devices In Control Systems (AREA)
- Traffic Control Systems (AREA)
Abstract
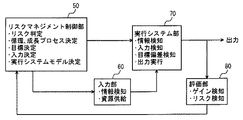
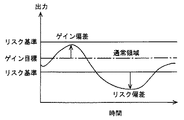
【解決手段】 制御システムは、リスクマネジメント制御部50と、入力部60と、実行システム部70と、評価部80とを含む。評価部80は、制御の結果、期待する目標特性に合致するゲインと、目標特性に反するリスクとを検知する。検知されたゲインおよびリスクは、確率次元で処理され、発生確率のヒストグラムが作成される。システムの信頼性をゲインとリスクとを確率次元で捉えて、リスクマネジメント制御部50がリスク判定を行なったり循環成長プロセスを決定する。このとき、リスクマネジメント制御部50は、評価部80により検知されたゲインおよびリスクを確率次元で捉えたシステムの信頼性に基づいて異常の予兆などを検知してリスクマネジメントを実行する。
【選択図】 図1
Description
1)制御システム上では、ゲインとリスクとが同次元で管理されていないこと、
2)リスクを考慮していないので、リスクの発生に対して制御システムの停止というような処理しか考えられない、
ということがある。それゆえに、制御システムにおいて、未然にリスクを回避しつつ、最大限のゲイン(燃費向上、排気ガスの最適浄化)が得られるような、リスクマネジメントを実現することが困難である。
以下、本発明の第1の実施の形態に係る制御システムの概要について説明する。図1を参照して、本実施の形態に係る制御システムの構成について説明する。
故障影響因子の作動負荷×頻度を検知して、設計寿命から負荷×頻度を減算して残存寿命を推定する。残存寿命の変化率が規定値以上、または残存寿命が規定値以下、または必要寿命に対し残存寿命が下回るなどの場合、以下の対応を実行する。なお、必要寿命は生涯作動回数・時間と作動・時間との差などから特定するようにすればよい。このような蓄積型故障に対しては、代替手段への切換、補助手段による冗長制御、作動頻度の抑制などの回避手段が実行される。
影響因子に負荷するストレスを検知し危険度を検知する。危険度が規定値以上になった場合、代替手段による切換、補助手段による冗長制御、負荷の分散・軽減などのリスク回避が実行される。なお、危険度は、入力エネルギ、荷重、発熱温度などからストレスを検知し判定するようにすればよい。
事前に検知できない場合、故障検知後、バックアップ手段に切換える。事前検知できる場合(故障確率がわかり、規定値以上の場合)には、代替手段による切換、補助手段による冗長制御を、故障を検出する前に実行することによりリスク回避を行なう。なお、故障確率は、通信手段により市場の情報を取得することなどにより検知するようにすればよい。
Rout=[Rout(1)、Rout(2)、Rout(3)、…]
入力と影響度合いとの関数で表現:Rout=rout(x)
入力:X=[x(1)、x(2)、x(3)、…]
(1−2)ゲインの定義
Gout=[Gout(1)、Gout(2)、Gout(3)、…]
入力と影響度合いとの関数で表現:Gout=gout(x)
入力:X=[x(1)、x(2)、x(3)、…]
(1−3)リスク効率の定義
Krout=[Krout(1)、Krout(2)、Krout(3)、…]
入力に対するリスクの割合で表現:Krout=Rout/x
(1−4)ゲイン効率の定義
Kgout=[Kgout(1)、Kgout(2)、Kgout(3)、…]
入力に対するゲインの割合で表現:Kgout=Gout/x
(2−1)目標リスク確率関数
Art=[Art(1)、Art(2)、Art(3)、…]
影響度合いと発生確率との関数で表現:Art=art(r)
r:リスク影響度合い
(2−2)目標ゲイン確率関数
Agt=[Agt(1)、Agt(2)、Agt(3)、…]
影響度合いと発生確率との関数で表現:Agt=agt(g)
g:ゲイン影響度合い
(2−3)目標リスク効率確率関数
Akrt=[Akrt(1)、Akrt(2)、Akrt(3)、…]
リスク効率と発生確率との関数で表現:Akrt=akrt(kr)
kr:リスク効率
(2−4)目標ゲイン効率確率関数
Akgt=[Akgt(1)、Akgt(2)、Akgt(3)、…]
ゲイン効率と発生確率との関数で表現:Akgt=akgt(g)
kg:ゲイン効率
(3−1)リスクの確率関数
(3−1−1)基準リスクRkを規定しない場合
Ar=[Ar(1)、Ar(2)、Ar(3)、…]
Ar=ar(Rout)
(3−1−2)基準リスクRkを規定する場合
Rk=[Rk(1)、Rk(2)、…]
基準リスクRkとして、Ar=ar(Rk−Rout)
(3−2)ゲインの確率関数
(3−2−1)基準ゲインGkを規定しない場合
Ag=[Ag(1)、Ag(2)、Ag(3)、…]
Ag=ag(Gout)
(3−2−2)基準ゲインGkを規定する場合
Gk=[Gk(1)、Gk(2)、…]
基準ゲインGkとして、Ag=ag(Gk−Gout)
(4−1)リスク効率の確率関数
(4−1−1)基準リスク効率Krkを規定しない場合
Akr=[Akr(1)、Akr(2)、Akr(3)、…]
Akr=akr(Krout)
(4−1−2)基準リスク効率Krkを規定する場合
基準リスク効率Krkとして、
Krk=[Krk(1)、Krk(2)、…]
Akr=akr(Krk−Krout)
(4−2)ゲイン効率の確率関数
(4−2−1)基準リスク効率Kgkを規定しない場合
Akg=[Akg(1)、Akg(2)、Akg(3)、…]
Akg=akg(Kgout)
(4−2−2)基準リスク効率Kgkを規定する場合
基準リスク効率Kgkとして、
Kgk=[Kgk(1)、Kgk(2)、…]
Akg=akg(Kgk−Kgout)
(5−1)リスク確率偏差
dAr=[dAr(1)、dAr(2)、dAr(3)、…]
dAr=Art−Ar
(5−2)ゲイン確率偏差
dAg=[dAg(1)、dAg(2)、dAg(3)、…]
dAg=Agt−Ag
(6−1)リスク効率確率偏差
dAkr=[dAkr(1)、dAkr(2)、dAkr(3)、…]
dAkr=Akrt−Akr
(6−2)ゲイン効率確率偏差
dAkg=[dAkg(1)、dAkg(2)、dAkg(3)、…]
dAkg=Akgt−Akg
このような定義を前提として、以下のようなプログラムが実行される。
上述した制御システムを、車両に適用した場合のより具体的な実施の形態を、以下の第2の実施の形態として説明する。なお、本実施の形態における制御ブロックは、前述の図8に示したものと同じであるため、ここでの詳細な説明は繰返さない。
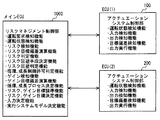
(1−1)車体速度:Agt(1)
エンジン出力Agt(11)、発電量Agt(12)、蓄電量Agt(13)、
モータトルクAgt(14)、モータ回転数Agt(15)、
CVT(Continuously Variable Transmission)変速比Agt(16)、駆動力Agt(17)
(1−2)排気ガス特性:Agt(2)
空燃比Agt(21)、
CO排出量Agt(22)、NOx排出量Agt(23)、HC排出量Agt(24)
(1−3)制動力:Agt(3)
アクチュエータ駆動電流Agt(31)、ブレーキ油圧Agt(32)、回生トルクAgt(33)
(2)目標ゲイン効率確率関数
(2−1)駆動効率:Akgt(1)
エンジン効率Akgt(11)、発電効率Akgt(12)、蓄電効率Akgt(13)、
モータ効率Akgt(14)
(2−2)制動効率:Akgt(2)
制動エネルギAkgt(21)、消費エネルギAkgt(22)、回生エネルギAkgt(23)
モータ効率Akgt(14)
(3)目標リスク確率関数
(3−1)車体速度低下リスク:Art(1)
エンジン出力変化Art(11)、発電量変化Art(12)、蓄電量変化Art(13)、
モータトルク変化Art(14)、モータ回転数変化Art(15)、
CVT変速比変化Art(16)、駆動力変化Art(17)
(3−2)排気ガス悪化リスク:Art(2)
空燃比変化Art(21)、
CO排出量変化Art(22)、NOx排出量変換Art(23)、HC排出量変化Art(24)
(3−3)制動力低下リスク:Art(3)
アクチュエータ駆動電流変化Art(31)、ブレーキ油圧変化Art(32)、
回生トルク変換Art(33)
(4)目標リスク効率確率関数
(4−1)駆動効率低下リスク:Akrt(1)
エンジン効率変化Akrt(11)、発電効率変化Akrt(12)、蓄電効率変換Akrt(13)、
モータ効率変化Akgt(14)
(4−2)制動効率低下リスク:Akrt(2)
制動エネルギ変化Akrt(21)、消費エネルギ変化Akrt(22)、
回生エネルギ変化Akrt(23)
次に、以下に、関数設定の一覧を示す。
伝達系
(1)駆動出力ゲイン
入力
燃料噴射量X(11)
エンジン出力
Gout(11)=gout(11){X(11)}
基準特性 Gk(11)
実偏差確率 Ag(11)=ag{Gk(11)−Gout(11)}
目標偏差確率 Agt(11)
発電量
Gout(12)=gout(12){Gout(11)}
基準特性Gk(12)
実偏差確率Ag(12)=ag{Gk(12)−Gout(12)}
目標偏差確率Agt(12)
蓄電量
Gout(13)=gout(13){Gout(12)}
基準特性Gk(13)
実偏差確率Ag(13)=ag{Gk(13)−Gout(13)}
目標偏差確率Agt(13)
第2入力
電力供給量X(12)
モータトルク
Gout(14)=gout(14){X(12)}
基準特性Gk(14)
実偏差確率Ag(14)=ag{Gk(14)−Gout(14)}
目標偏差確率Agt(14)
モータ回転数
Gout(15)=gout(15){X(12)}
基準特性Gk(15)
実偏差確率Ag(15)=ag{Gk(15)−Gout(15)}
目標偏差確率Agt(15)
CVT変速比
Gout(16)=gout(16){Gout(15)}
基準特性Gk(16)
実偏差確率Ag(16)=ag{Gk(16)−Gout(16)}
目標偏差確率Agt(16)
駆動力
Gout(17)=gout(17){Gout(16)}
基準特性Gk(17)
実偏差確率Ag(17)=ag{Gk(17)−Gout(17)}
目標偏差確率Agt(17)
車体速度
Gout(1)=gout(1){Gout(16)}
基準特性Gk(1)
実偏差確率Ag(1)=ag{Gk(1)−Gout(1)}
目標偏差確率Agt(1)
車体出力
Gout(18)=Gout(1)×Gout(17)
基準特性Gk(18)
実偏差確率Ag(18)=ag{Gk(18)−Gout(18)}
目標偏差確率Agt(18)
(2)駆動出力ゲイン
入力
燃料噴射量X(11)
エンジン出力
Gout(11)=gout(11){X(11)}
基準特性 Rk(11)
実偏差確率 Ar(11)=ar{Rk(11)−Gout(11)}
目標偏差確率 Art(11)
発電量
Gout(12)=gout(12){Gout(11)}
基準特性Rk(12)
実偏差確率Ar(12)=ar{Rk(12)−Gout(12)}
目標偏差確率Art(12)
蓄電量
Gout(13)=gout(13){Gout(12)}
基準特性Rk(13)
実偏差確率Ar(13)=ar{Rk(13)−Gout(13)}
目標偏差確率Art(13)
第2入力
電力供給量X(12)
モータトルク
Gout(14)=gout(14){X(12)}
基準特性Rk(14)
実偏差確率Ar(14)=ar{Rk(14)−Gout(14)}
目標偏差確率Art(14)
モータ回転数
Gout(15)=gout(15){X(12)}
基準特性Rk(15)
実偏差確率Ar(15)=ar{Rk(15)−Gout(15)}
目標偏差確率Art(15)
CVT変速比
Gout(16)=gout(16){Gout(15)}
基準特性Rk(16)
実偏差確率Ar(16)=ar{Rk(16)−Gout(16)}
目標偏差確率Art(16)
駆動力
Gout(17)=gout(17){Gout(16)}
基準特性Rk(17)
実偏差確率Ar(17)=ar{Rk(17)−Gout(17)}
目標偏差確率Art(17)
車体速度
Gout(1)=gout(1){Gout(16)}
基準特性Rk(1)
実偏差確率Ar(1)=ar{Rk(1)−Gout(1)}
目標偏差確率Art(1)
車体出力
Gout(18)=Gout(1)×Gout(17)
基準特性Rk(18)
実偏差確率Ar(18)=ar{Rk(18)−Gout(18)}
目標偏差確率Art(18)
(3)駆動ゲイン効率
エンジン熱効率
Kgout(11)=kgout(11){X(11)}
基準特性 Kgk(11)
実偏差確率 Akg(11)=akg{Kgk(11)−Kgout(11)}
目標偏差確率 Akgt(11)
発電効率
Kgout(12)=kgout(12){Kgout(11)}
基準特性 Kgk(12)
実偏差確率 Akg(12)=akg{Kgk(12)−Kgout(12)}
目標偏差確率 Akgt(12)
充電効率
Kgout(13)=kgout(13){Kgout(12)}
基準特性 Kgk(13)
実偏差確率 Akg(13)=akg{Kgk(13)−Kgout(13)}
目標偏差確率 Akgt(13)
モータ効率
Kgout(14)=kgout(14){X(12)}
基準特性 Kgk(14)
実偏差確率 Akg(14)=akg{Kgk(14)−Kgout(14)}
目標偏差確率 Akgt(14)
駆動効率
Kgout(1)=kgout(1){Kgout(14)}
基準特性 Kgk(1)
実偏差確率 Akg(1)=akg{Kgk(1)−Kgout(1)}
目標偏差確率 Akgt(1)
(4)駆動リスク効率
エンジン熱効率
Kgout(11)=kgout(11){X(11)}
基準特性 Krk(11)
実偏差確率 Akr(11)=akr{Krk(11)−Kgout(11)}
目標偏差確率 Akrt(11)
発電効率
Kgout(12)=kgout(12){Kgout(11)}
基準特性 Krk(12)
実偏差確率 Akr(12)=akr{Krk(12)−Kgout(12)}
目標偏差確率 Akrt(12)
充電効率
Kgout(13)=kgout(13){Kgout(12)}
基準特性 Krk(13)
実偏差確率 Akr(13)=akr{Krk(13)−Kgout(13)}
目標偏差確率 Akrt(13)
モータ効率
Kgout(14)=kgout(14){X(12)}
基準特性 Krk(14)
実偏差確率 Akr(14)=akr{Krk(14)−Kgout(14)}
目標偏差確率 Akrt(14)
駆動効率
Kgout(1)=kgout(1){Kgout(14)}
基準特性 Krk(1)
実偏差確率 Akr(1)=akr{Krk(1)−Kgout(1)}
目標偏差確率 Akrt(1)
(5)排気ガス特性
空燃比
Gout(21)=gout(21){X(11)}
基準特性 Gk(21)
実偏差確率 Ag(21)=ag{Gk(21)−Gout(21)}
目標偏差確率 Agt(21)
CO排出量
Gout(22)=gout(22){Gout(21)}
基準特性 Gk(22)
実偏差確率 Ag(22)=ag{Gk(22)−Gout(22)}
目標偏差確率 Agt(22)
NOx排出量
Gout(23)=gout(23){Gout(21)}
基準特性 Gk(23)
実偏差確率 Ag(23)=ag{Gk(23)−Gout(23)}
目標偏差確率 Agt(23)
HC排出量
Gout(24)=gout(24){Gout(21)}
基準特性 Gk(24)
実偏差確率 Ag(24)=ag{Gk(24)−Gout(24)}
目標偏差確率 Agt(24)
排気ガス特性
Gout(2)=gout(2){Gout(21)}
基準特性 Gk(2)
実偏差確率 Ag(2)=ag{Gk(2)−Gout(2)}
目標偏差確率 Agt(2)
(6)排気ガス悪化リスク
空燃比
Gout(21)=gout(21){X(11)}
基準特性 Rk(21)
実偏差確率 Ar(21)=ar{Rk(21)−Gout(21)}
目標偏差確率 Art(21)
CO排出量
Gout(22)=gout(22){Gout(21)}
基準特性 Rk(22)
実偏差確率 Ar(22)=ar{Rk(22)−Gout(22)}
目標偏差確率 Art(22)
NOx排出量
Gout(23)=gout(23){Gout(21)}
基準特性 Rk(23)
実偏差確率 Ar(23)=ar{Rk(23)−Gout(23)}
目標偏差確率 Art(23)
HC排出量
Gout(24)=gout(24){Gout(21)}
基準特性 Rk(24)
実偏差確率 Ar(24)=ar{Rk(24)−Gout(24)}
目標偏差確率 Art(24)
排気ガス特性
Gout(2)=gout(2){Gout(21)}
基準特性 Rk(2)
実偏差確率 Ar(2)=ar{Rk(2)−Gout(2)}
目標偏差確率 Art(2)
(7)制動力ゲイン
入力
電力供給量X(31)
アクチュエータ駆動電流
Gout(31)=gout(31){X(31)}
基準特性 Gk(31)
実偏差確率 Ag(31)=ag{Gk(31)−Gout(31)}
目標偏差確率 Agt(31)
ブレーキ油圧
Gout(32)=gout(32){Gout(31)}
基準特性 Gk(32)
実偏差確率 Ag(32)=ag{Gk(32)−Gout(32)}
目標偏差確率 Agt(32)
回生トルク
Gout(33)=gout(33){Gout(33)}
基準特性 Gk(33)
実偏差確率 Ag(33)=ag{Gk(33)−Gout(33)}
目標偏差確率 Agt(33)
制動力
Gout(3)=gout(3){Gout(32)}
基準特性 Gk(3)
実偏差確率 Ag(3)=ag{Gk(3)−Gout(3)}
目標偏差確率 Agt(3)
(8)制動力低下リスク
入力
電力供給量X(31)
アクチュエータ駆動電流
Gout(31)=gout(31){X(31)}
基準特性 Rk(31)
実偏差確率 Ar(31)=ar{Rk(31)−Gout(31)}
目標偏差確率 Art(31)
ブレーキ油圧
Gout(32)=gout(32){Gout(31)}
基準特性 Rk(32)
実偏差確率 Ar(32)=ar{Rk(32)−Gout(32)}
目標偏差確率 Art(32)
回生トルク
Gout(33)=gout(33){Gout(33)}
基準特性 Rk(33)
実偏差確率 Ar(33)=ar{Rk(33)−Gout(33)}
目標偏差確率 Art(33)
制動力
Gout(3)=gout(3){Gout(32)}
基準特性 Rk(3)
実偏差確率 Ar(3)=ar{Rk(3)−Gout(3)}
目標偏差確率 Art(3)
(9)制動効率
制動エネルギ
Kgout(21)=kgout(21){Gout(1)}
基準特性 Kgk(21)
実偏差確率 Akg(21)=akg{Kgk(21)−Kgout(21)}
目標偏差確率 Akgt(21)
消費エネルギ
Kgout(22)=kgout(22){Kgout(21)}
基準特性 Kgk(22)
実偏差確率 Akg(22)=akg{Kgk(22)−Kgout(22)}
目標偏差確率 Akgt(22)
回生エネルギ
Kgout(23)=kgout(23){Kgout(21)}
基準特性 Kgk(23)
実偏差確率 Akg(23)=akg{Kgk(23)−Kgout(23)}
目標偏差確率 Akgt(23)
制動効率
Kgout(2)=kgout(2){Kgout(23)}
基準特性 Kgk(2)
実偏差確率 Akg(2)=akg{Kgk(2)−Kgout(2)}
目標偏差確率 Akgt(2)
(10)制動効率低下リスク
制動エネルギ
Kgout(21)=kgout(21){Gout(1)}
基準特性 Krk(21)
実偏差確率 Akr(21)=akr{Krk(21)−Kgout(21)}
目標偏差確率 Akrt(21)
消費エネルギ
Kgout(22)=kgout(22){Kgout(21)}
基準特性 Krk(22)
実偏差確率 Akr(22)=akr{Krk(22)−Kgout(22)}
目標偏差確率 Akrt(22)
回生エネルギ
Kgout(23)=kgout(23){Kgout(21)}
基準特性 Krk(23)
実偏差確率 Akr(23)=akr{Krk(23)−Kgout(23)}
目標偏差確率 Akrt(23)
制動効率
Kgout(2)=kgout(2){Kgout(23)}
基準特性 Krk(2)
実偏差確率 Akr(2)=akr{Krk(2)−Kgout(2)}
目標偏差確率 Akrt(2)
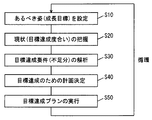
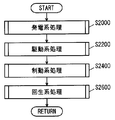
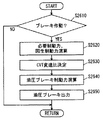
本実施の形態に係る車両の制御システムは、タイヤ前後力駆動制御において、
(1)目標の変更
(2)目標達成手段の解析
(3)目標達成手段の決定
を行なう。
1)SOC(States Of Charge)に従い、モータ出力に対してエンジン出力の比率が最小になるようにする、
2)制動時に車体運動エネルギに応じて、回生ブレーキエネルギが最大になるようにする、
3)エンジン熱効率、モータ効率が最大になるようにする、
4)排気ガス清浄特性が目標特性になるようにする、
5)制御システムのリスクが目標範囲になるようにする、
というものである。
(1)リスクが基準を超えた場合システム変更してリスクを回避している、
(2)システム変更によりリスクが増加するがシステムの変更内容はリスク限界を超えないように制御されている。
以下、本発明の制御システムを車両の制御システムに適用した場合であって、エネルギマネジメント制御に適用した場合を、以下の第3の実施の形態として説明する。
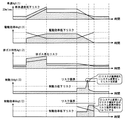
(1)仮定条件(ドライバ要求)
車速:エンジンONから100秒後に発進
加速:20秒間で20m/sまで加速(1m/s2)
定常:300秒間定常走行
減速:40秒間で20m/sから0m/sまで減速(0.5m/s2)
温度:外気温度:35℃
室内温度 初期温度 50℃
目標温度 25℃(エンジンONと同時に設定)
SOC:初期80%
(2)仮定条件(入力)
加速走行(1m/s2) SOC消費1%/s
定常走行 SOC消費0.1%/s
エアコン(室温≠目標)SOC消費0.2%/s(温度降下0.1℃/s)
エアコン(室温=目標)SOC消費0.1%/s
発電 SOC増加0.2%/s
回生 SOC増加0.5%/s(ただし、車速5m/s以上のみ)
(3)ゲイン定義
駆動系 加速度(m/s2)×30.0
車速×2.0
制動系 減速状態 減速度(m/s2)×80.0
電池 SOC×0.5
エアコン 無視
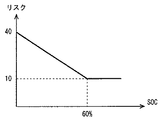
(4)リスク定義
駆動系 停止状態 5.0
加速状態 1.0×車速(m/s)+10.00
定常・減速 10.0
制動系 走行状態 10.0
減速状態 40.0(回生制動時は−20,0)
電池 図19参照
エアコン 無視
なお、ゲイン定義やリスク定義は経験値により変更すると良い。たとえば、経年変化により加速時の信頼性が低下すると、駆動系加速状態のリスクを増加させる。また、データより、低温時の制動力が低下することが判明すると、低温時のみ制動リスクを増加させる。データより、回生制動の信頼性が予想以上に良好であることが判明すると、回生制動リスクを減少させる。このようにして、経年変化による影響を加味する。
Claims (17)
- 状態量に関する情報および操作量に関する情報の少なくとも一方を検知するための検知手段と、検知された情報に基づいて、目標を達成するための実行手段に与えられる制御情報を生成するための制御手段と、前記制御情報に基づいて、電気的動作および機械的動作の少なくとも一方を実行するための実行手段とを含む移動体の制御システムであって、
前記システムについて、少なくとも前記目標に対する状態量と前記目標に反する状態量とを対比可能な同一の次元で処理して、前記システムの信頼性に関する情報を検知するための信頼性検知手段と、
前記検知された信頼性に関する情報に基づいて、前記目標および前記制御情報の少なくとも一方を変更するための変更手段とを含む、制御システム。 - 前記信頼性検知手段は、確率次元で処理して、前記システムの信頼性に関する情報を検知するための手段を含む、請求項1に記載の制御システム。
- 前記信頼性検知手段は、前記実行手段における、目標に対する偏差が予め定められた以上の値になる確率に基づいて、前記信頼性に関する情報を検知するための手段を含む、請求項1または2に記載の制御システム。
- 前記信頼性検知手段は、前記実行手段による前記動作が実行された結果、前記目標とする出力と実際の出力との偏差が予め定められた以上の値になる確率に基づいて、前記信頼性に関する情報を検知するための手段を含む、請求項1または2に記載の制御システム。
- 前記信頼性検知手段は、前記実行手段による前記動作が実行された結果、前記目標とする効率と実際の効率との偏差が予め定められた以上の値になる確率に基づいて、前記信頼性に関する情報を検知するための手段を含む、請求項1または2に記載の制御システム。
- 前記信頼性に関する情報は、前記移動体を構成する部品の状態量が変化する確率により表わされる情報である、請求項1〜5のいずれかに記載の制御システム。
- 前記信頼性に関する情報は、前記移動体を構成する部品である、入力系部品、制御系部品、出力系部品および通信系部品の少なくとも1つにおいて異常が発生する確率により表わされる情報である、請求項1〜5のいずれかに記載の制御システム。
- 前記信頼性に関する情報は、前記移動体を構成する部品である、入力系部品である前記状態量を検知するセンサの検知誤差、出力系部品であるアクチュエータの作動誤差、出力系部品であるアクチュエータの応答性、通信系部品における応答性および前記目標の誤差の少なくとも1つに起因した異常が発生する確率により表わされる情報である、請求項1〜5のいずれかに記載の制御システム。
- 前記変更手段は、前記信頼性が目標範囲内であるときに、前記目標に対する偏差に基づいて、前記目標および前記制御情報の少なくとも一方を変更するための手段を含む、請求項1に記載の制御システム。
- 前記変更手段は、前記目標に対する偏差が予め定められた範囲内であると、前記制御情報を生成するための入出力特性を変更することにより、前記制御情報を変更するための手段を含む、請求項9に記載の制御システム。
- 前記変更手段は、前記目標に対する偏差が予め定められた値以上であると、前記目標が過大であると判断して、前記目標を変更するための手段を含む、請求項9に記載の制御システム。
- 移動体としての車両における必要な目標を実現できるように車両を制御する制御システムであって、
ゲイン状態量として、目標特性に対する車両の状態量を検知するための手段と、
リスク状態量として、目標特性に反する車両の状態量を検知するための手段と、
前記検知した各状態量と、前記各状態量の目標との偏差が発生する確率を算出するための手段と、
前記リスク状態量について算出された確率が予め定められた範囲内であって、前記ゲイン状態量について算出された確率が予め定められた範囲内であると、さらに性能を向上させる方向に前記目標を変更するための手段とを含む、制御システム。 - 移動体としての車両における必要な目標を実現できるように車両を制御する制御システムであって、
ゲイン状態量として、目標特性に対する車両の状態量を検知するための手段と、
リスク状態量として、目標特性に反する車両の状態量を検知するための手段と、
前記検知した各状態量と、前記各状態量の目標との偏差が発生する確率を算出するための手段と、
前記リスク状態量について算出された確率が予め定められた範囲内であって、前記ゲイン状態量について算出された確率が予め定められた範囲外であると、前記ゲイン状態量に関係するアクチュエータの入出力特性を変更するための手段とを含む、制御システム。 - 移動体としての車両における必要な目標を実現できるように車両を制御する制御システムであって、
ゲイン状態量として、目標特性に対する車両の状態量を検知するための手段と、
リスク状態量として、目標特性に反する車両の状態量を検知するための手段と、
前記検知した各状態量と、前記各状態量の目標との偏差が発生する確率を算出するための手段と、
前記リスク状態量について算出された確率が予め定められた範囲外であると、リスク回避措置を実行するための手段とを含む、制御システム。 - 移動体としての車両における、エネルギ効率、駆動特性、排気ガス特性および制動特性のうち少なくとも1つを制御する制御システムであって、
ゲイン状態量として、車両速度、駆動効率、排気ガス浄化特性、制動力、制動効率のうち少なくとも1つを検知するための手段と、
リスク状態量として、車速低下リスク、駆動効率低下リスク、排気ガス浄化悪化リスク、制動力低下リスク、制動効率低下リスクのうち少なくとも1つを検知するための手段と、
前記検知した各状態量と、前記各状態量の目標との偏差が発生する確率を算出するための手段と、
前記リスク状態量について算出された確率が予め定められた範囲内であって、前記ゲイン状態量について算出された確率が予め定められた範囲内であると、さらに性能を向上させる方向に前記目標を変更するための手段とを含む、制御システム。 - 移動体としての車両における、エネルギ効率、駆動特性、排気ガス特性および制動特性のうち少なくとも1つを制御する制御システムであって、
ゲイン状態量として、車両速度、駆動効率、排気ガス浄化特性、制動力、制動効率のうち少なくとも1つを検知するための手段と、
リスク状態量として、車速低下リスク、駆動効率低下リスク、排気ガス浄化悪化リスク、制動力低下リスク、制動効率低下リスクのうち少なくとも1つを検知するための手段と、
前記検知した各状態量と、前記各状態量の目標との偏差が発生する確率を算出するための手段と、
前記リスク状態量について算出された確率が予め定められた範囲内であって、前記ゲイン状態量について算出された確率が予め定められた範囲外であると、前記エネルギ効率、排気ガス特性および制動特性に関係するアクチュエータの入出力特性を変更するための手段とを含む、制御システム。 - 移動体としての車両における、エネルギ効率、駆動特性、排気ガス特性および制動特性のうち少なくとも1つを制御する制御システムであって、
ゲイン状態量として、車両速度、駆動効率、排気ガス浄化特性、制動力、制動効率のうち少なくとも1つを検知するための手段と、
リスク状態量として、車速低下リスク、駆動効率低下リスク、排気ガス浄化悪化リスク、制動力低下リスク、制動効率低下リスクのうち少なくとも1つを検知するための手段と、
前記検知した各状態量と、前記各状態量の目標との偏差が発生する確率を算出するための手段と、
前記リスク状態量について算出された確率が予め定められた範囲外であると、リスク回避措置を実行するための手段とを含む、制御システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004103650A JP4345547B2 (ja) | 2004-03-31 | 2004-03-31 | ハイブリッド車両の制御システム |
| US11/061,880 US7489994B2 (en) | 2004-03-31 | 2005-02-22 | Control system for movable body |
| CN200510058900.2A CN1677286A (zh) | 2004-03-31 | 2005-03-30 | 用于移动体的控制系统 |
| DE102005014720.8A DE102005014720B4 (de) | 2004-03-31 | 2005-03-31 | Regelungssystem für einen beweglichen Körper |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004103650A JP4345547B2 (ja) | 2004-03-31 | 2004-03-31 | ハイブリッド車両の制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005292944A true JP2005292944A (ja) | 2005-10-20 |
| JP4345547B2 JP4345547B2 (ja) | 2009-10-14 |
Family
ID=35049841
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004103650A Expired - Fee Related JP4345547B2 (ja) | 2004-03-31 | 2004-03-31 | ハイブリッド車両の制御システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7489994B2 (ja) |
| JP (1) | JP4345547B2 (ja) |
| CN (1) | CN1677286A (ja) |
| DE (1) | DE102005014720B4 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011213275A (ja) * | 2010-04-01 | 2011-10-27 | Hitachi Automotive Systems Ltd | ハイブリッド車の制御装置 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1610992B1 (de) * | 2003-03-26 | 2011-05-18 | Continental Teves AG & Co. oHG | Elektronisches steuersystem für ein fahrzeug und verfahren zum ermitteln eines vom fahrer unabhängigen eingriffs in ein fahrzeugsystem |
| US7774109B2 (en) * | 2007-09-19 | 2010-08-10 | Gm Global Technology Operations, Inc. | Method and apparatus for managing torque inputs to an electro-mechanical transmission |
| JP4420097B2 (ja) * | 2007-10-02 | 2010-02-24 | 株式会社デンソー | 噴射異常検出装置及び燃料噴射システム |
| JPWO2011142015A1 (ja) * | 2010-05-12 | 2013-07-22 | トヨタ自動車株式会社 | 演算器異常判定装置及び方法 |
| DE102011084204A1 (de) * | 2011-10-10 | 2013-04-11 | Robert Bosch Gmbh | Verfahren zum Ansteuern von Sicherheitsaktuatorik eines Kraftfahrzeugs |
| CN103455023B (zh) * | 2012-06-01 | 2016-05-04 | 北汽福田汽车股份有限公司 | 用于新能源汽车的动力系统的测试装置和方法 |
| JP5949583B2 (ja) * | 2013-01-29 | 2016-07-06 | トヨタ自動車株式会社 | 異常検出装置 |
| CN105228870B (zh) * | 2013-05-21 | 2017-07-11 | 丰田自动车株式会社 | 制动装置 |
| US9514577B2 (en) | 2014-09-26 | 2016-12-06 | International Business Machines Corporation | Integrating economic considerations to develop a component replacement policy based on a cumulative wear-based indicator for a vehicular component |
| US10540828B2 (en) | 2014-09-26 | 2020-01-21 | International Business Machines Corporation | Generating estimates of failure risk for a vehicular component in situations of high-dimensional and low sample size data |
| US10769866B2 (en) | 2014-09-26 | 2020-09-08 | International Business Machines Corporation | Generating estimates of failure risk for a vehicular component |
| US9454855B2 (en) | 2014-09-26 | 2016-09-27 | International Business Machines Corporation | Monitoring and planning for failures of vehicular components |
| US9286735B1 (en) | 2014-09-26 | 2016-03-15 | International Business Machines Corporation | Generating cumulative wear-based indicators for vehicular components |
| FR3031406B1 (fr) * | 2015-01-05 | 2017-07-28 | Valeo Schalter & Sensoren Gmbh | Architecture pour systeme d'aide a la conduite a automatisation conditionnelle |
| DE102015207895A1 (de) * | 2015-04-29 | 2016-11-03 | Continental Automotive Gmbh | Verfahren zur Überwachung eines elektronischen Steuergeräts und Steuergerät für ein Kraftfahrzeug |
| JP6451718B2 (ja) * | 2016-11-08 | 2019-01-16 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| DE102017215208A1 (de) * | 2017-08-31 | 2019-02-28 | Robert Bosch Gmbh | Konzept zum fahrerlosen Führen eines Kraftfahrzeugs auf einer schrägen Rampe eines Parkplatzes |
| CN107830002B (zh) * | 2017-10-27 | 2023-07-04 | 江苏徐工工程机械研究院有限公司 | 电液控制系统、方法及高空作业平台 |
| CN107867295B (zh) * | 2017-11-08 | 2019-12-31 | 广东翼卡车联网服务有限公司 | 基于车辆出险概率的事故预警方法、存储设备及车载终端 |
| JP2019157652A (ja) * | 2018-03-07 | 2019-09-19 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
| CN110929996B (zh) * | 2019-11-06 | 2025-01-10 | 腾讯科技(深圳)有限公司 | 驾驶风险估计方法及装置 |
| CN112198866B (zh) * | 2020-09-30 | 2021-09-07 | 中国汽车工程研究院股份有限公司 | 一种模拟停机时间的方法 |
| CN119821430B (zh) * | 2025-03-04 | 2025-12-02 | 江西泰豪军工集团有限公司 | 一种无人车辆的h型传动构型系统 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2925437B2 (ja) | 1993-07-22 | 1999-07-28 | 富士通テン株式会社 | 自己診断機能を備えた車両制御用コンピュータシステム |
| JPH08318765A (ja) * | 1995-05-25 | 1996-12-03 | Hitachi Ltd | 情報化自動車制御装置及び方法 |
| JPH0991034A (ja) | 1995-09-27 | 1997-04-04 | Mazda Motor Corp | 電子制御ユニット |
| US6253129B1 (en) * | 1997-03-27 | 2001-06-26 | Tripmaster Corporation | System for monitoring vehicle efficiency and vehicle and driver performance |
| JP3364413B2 (ja) | 1997-07-23 | 2003-01-08 | 株式会社デンソー | 自動運転制御装置 |
| JP2001071873A (ja) | 1999-09-03 | 2001-03-21 | Dic Japan Kk | 自動車管理システム及び整備状態管理カード |
| DE10049013B4 (de) * | 1999-12-01 | 2015-12-03 | Honda Giken Kogyo K.K. | Fahrzustand-Überwachungsvorrichtung für Fahrzeuge |
| GB0002292D0 (en) * | 2000-02-02 | 2000-03-22 | Jaguar Cars | Motor vehicle dynamic stability control |
| JP2002175597A (ja) | 2000-12-07 | 2002-06-21 | Hitachi Ltd | 自動車の走行制御システム |
| US6714894B1 (en) * | 2001-06-29 | 2004-03-30 | Merritt Applications, Inc. | System and method for collecting, processing, and distributing information to promote safe driving |
| JP2003067580A (ja) | 2001-08-29 | 2003-03-07 | Mitsubishi Electric Corp | リスクヘッジ方法及びリスクヘッジシステム |
| DE10244354A1 (de) * | 2002-09-24 | 2004-04-01 | Andreas Pachler | Globus |
| US6940426B1 (en) * | 2003-09-05 | 2005-09-06 | Ridgeback Systems Llc | Aircraft flight risk measuring system and method of operation |
-
2004
- 2004-03-31 JP JP2004103650A patent/JP4345547B2/ja not_active Expired - Fee Related
-
2005
- 2005-02-22 US US11/061,880 patent/US7489994B2/en not_active Expired - Fee Related
- 2005-03-30 CN CN200510058900.2A patent/CN1677286A/zh active Pending
- 2005-03-31 DE DE102005014720.8A patent/DE102005014720B4/de not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011213275A (ja) * | 2010-04-01 | 2011-10-27 | Hitachi Automotive Systems Ltd | ハイブリッド車の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US7489994B2 (en) | 2009-02-10 |
| JP4345547B2 (ja) | 2009-10-14 |
| DE102005014720A1 (de) | 2006-01-19 |
| DE102005014720B4 (de) | 2016-02-18 |
| US20050222724A1 (en) | 2005-10-06 |
| CN1677286A (zh) | 2005-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4345547B2 (ja) | ハイブリッド車両の制御システム | |
| JP2004514399A5 (ja) | ||
| US9243541B2 (en) | Control of aftertreatment regeneration in a hybrid powered vehicle | |
| US11085383B2 (en) | Control unit for adapting the emission of a vehicle | |
| CN101512134B (zh) | 动力系统的转矩控制装置 | |
| US8660775B2 (en) | Method and device for operating an engine start-stop function for the driving engine of a motor vehicle | |
| CN109466378B (zh) | 抑制动力电池放电电流过大的方法、装置及纯电动汽车 | |
| KR101085688B1 (ko) | 하이브리드 차량 작동 방법 | |
| CN111845705B (zh) | 车辆及其控制方法 | |
| US20110139524A1 (en) | Method and device for controlling a drive train of a vehicle | |
| US10814859B2 (en) | Hybrid electric vehicle and method of controlling shift thereof | |
| US20150144077A1 (en) | System for checking a combustion engine coupled with an electric generator of a hybrid terrestrial vehicle having a drive line driven by at least one electric motor | |
| WO2021019617A1 (ja) | ハイブリッド車両の制御方法及びハイブリッド車両の制御装置 | |
| KR102467053B1 (ko) | 하이브리드 차량의 gpf 재생제어방법 | |
| US20120004832A1 (en) | Method and device for operating a drive unit | |
| US8839608B2 (en) | Method of controlling an internal combustion engine and corresponding internal combustion engine | |
| KR20170035559A (ko) | 주행 환경에 적응적인 토크를 고려한, HEV 자동차(Hybrid Electric Vehicle)의 가속 요구 토크 제어 방법 및 장치 | |
| CN120756453A (zh) | 车辆能量的管理控制方法、系统以及车辆 | |
| KR101765538B1 (ko) | 하이브리드 차량의 엔진 토크 학습 장치 및 방법 | |
| KR20130034457A (ko) | 하이브리드 차량의 산소 센서 진단 장치 및 방법 | |
| KR102422145B1 (ko) | 전동화 차량의 런치 컨트롤 방법 및 전동화 차량 | |
| US20100005785A1 (en) | Method for Reducing Emissions in a Motor Vehicle by Controlling the Generator Output | |
| KR102183200B1 (ko) | 차량 및 그 제어 방법 | |
| JP7256141B2 (ja) | 車両制御装置、および、車両制御方法 | |
| CN112648094B (zh) | 用于针对内燃机进行基于排放的轨迹规划的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060719 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090310 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090508 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090623 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090706 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4345547 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120724 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130724 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |