JP2005291942A - 回転角度センサ - Google Patents
回転角度センサ Download PDFInfo
- Publication number
- JP2005291942A JP2005291942A JP2004107910A JP2004107910A JP2005291942A JP 2005291942 A JP2005291942 A JP 2005291942A JP 2004107910 A JP2004107910 A JP 2004107910A JP 2004107910 A JP2004107910 A JP 2004107910A JP 2005291942 A JP2005291942 A JP 2005291942A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- rotation angle
- angle sensor
- magnetism
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000002093 peripheral effect Effects 0.000 claims abstract description 15
- 230000004907 flux Effects 0.000 claims abstract description 13
- 230000005389 magnetism Effects 0.000 claims description 45
- 238000006073 displacement reaction Methods 0.000 abstract description 4
- 238000005259 measurement Methods 0.000 description 7
- 230000000052 comparative effect Effects 0.000 description 5
- 239000000696 magnetic material Substances 0.000 description 5
- 229910001172 neodymium magnet Inorganic materials 0.000 description 5
- 238000000034 method Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
Images








Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【課題】 軸ずれによって生じる角度誤差を低減可能な回転角度センサを提供する。
【解決手段】 回転軸6に支持された磁気発生部3は回転軸6を中心として回転する。磁気センサ4および5は、磁気発生部3の周辺部の直下に配置されている。磁気発生部3の磁気センサ4,5に対向する部分は、周辺部分の方がその他の部分よりも磁気センサ4,5との間の距離が大になるように構成されている。軸ずれが生じても、磁気発生部3の端部での磁束密度変化が緩和される。そのため、回転角度センサを収容するケース本体の構造に依らずに軸ずれによる角度誤差を低減することが出来る。
【選択図】 図4
【解決手段】 回転軸6に支持された磁気発生部3は回転軸6を中心として回転する。磁気センサ4および5は、磁気発生部3の周辺部の直下に配置されている。磁気発生部3の磁気センサ4,5に対向する部分は、周辺部分の方がその他の部分よりも磁気センサ4,5との間の距離が大になるように構成されている。軸ずれが生じても、磁気発生部3の端部での磁束密度変化が緩和される。そのため、回転角度センサを収容するケース本体の構造に依らずに軸ずれによる角度誤差を低減することが出来る。
【選択図】 図4
Description
本発明は軸ずれによって生じる角度誤差を低減可能な回転角度センサに関するものである。
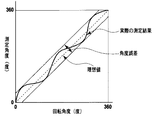
回転角度センサにおける角度誤差は、図1に示すように表すことができる。すなわち、図1に示すように、横軸は回転角度センサの回転角度であり、縦軸は当該回転角度センサによる測定値である測定角度である。回転角度センサの回転角度に、当該回転角度センサによる測定値である測定角度が全回転角度において正確に一致していれば、図1に点線で示すような理想値直線が得られるが、実際の測定結果を示す実線は、理想値直線からはなれるほど、測定誤差が大きいことを示しており、+側(実際の回転角度より測定角度の方が大きい)の最大誤差(絶対値)と、−側(実際の回転角度より測定角度の方が小さい)の最大誤差(絶対値)との合計を角度誤差と定義することができる。
軸ずれによって生じる角度誤差を低減する従来の回転角度センサとして以下のような技術が知られている。
まず、特許文献1においては、変形ベアリングの内輪をテーパ状に形成し、この内輪に固定された回転軸と共に磁石が回転して、磁石の円周直下に近接させて配置された磁気センサから、角度変化に対応した出力が得られるようになっている。回転軸および磁石の自重により、変形ベアリングの内輪が外輪の内側側面に向けて転動体を押し付ける力が働くので、回転軸が横方向の力による影響を受けにくくなり、回転軸の横ずれによる角度測定の誤差を小さくすることができるものである。
また、特許文献2においては、円板状に形成された磁石は、回転軸に支持されており、この回転軸と共に回転中心線を中心として円周方向に回転する。磁石の円周付近に配置された4つの磁気センサは、磁石の円板面に平行な平面P上に固定されている。1対の磁気センサが平面P上の基準点Oに対称的に配置され、他の1対の磁気センサが基準点Oに対称的に配置されている。平面Pと磁石の回転中心線との交点とほぼ一致する基準点Oから各磁気センサの中心までの距離は、磁石の半径と異なっているというものである。
さらに、特許文献3においては、センサ全体のサイズをより小さくし、かつ性能の安定性が良い回転角度センサを提供することを目的としたものであって、図2の(a),(b)に示すように、円板状に形成された磁石1は回転軸2に支持され、この回転軸2を中心として、回転可能に構成された回転角度センサが記載されている。磁気センサAおよびBは、共に等しい温度特性を有するホール素子であり、円板の中心Oと磁気センサAとを通る直線、および中心Oと磁気センサBとを通る直線とがなす角度が概ね90度になるように配置されている。また、磁気センサAおよびBは、共に磁石の円周の直下に配置されている。
特許文献3の構造を有する回転角度センサには、特許文献1に記述されているように、軸ずれにより角度精度が低下するという問題があった。特許文献1に開示されている技術を用いれば内輪と外輪がテーパ状に形成された変形ベアリングを用いてケース本体を構成することによって軸ずれによる角度誤差を低減することが出来るが、回転角度センサ専用のケースを用いない場合や非接触で回転角度を測定できるという特長を活かして、円盤型磁石と磁気センサ等が配置されているセンサ部が異なるケースに封入されている場合は特許文献1による方法により軸ずれによる角度精度の低下を改善することが出来ない。
通常、径方向着磁した円盤型磁石が生成するZ軸方向の磁束密度は、図3に示すように、磁石の最端部付近が最大となるため、良好な分解能や外来磁場の影響を最小限にするために、磁気センサはこの磁石の端部付近に設置される。しかしながら、この磁石端部付近の磁束密度は、磁石の径方向の位置の変化に対する磁束密度の変化率が非常に大きいため軸ずれにより磁気センサが検出する磁束密度が大きく変化し、結果として大きな角度誤差を生ずることとなる。特許文献2に記載のセンサではこの問題は解消できない。
そこで本発明の目的は以上のような問題を解消し、回転角度センサのケース本体の構造に依らずに軸ずれによる角度誤差を低減することができる回転角度センサを提供することにある。
発明者は、磁気発生部の形状を所定の断面形状にすることによって、磁気発生部の端部での磁束密度変化が緩和出来ることを見出し、ケース本体有無に依らずに軸ずれによる角度誤差を低減することが出来ることを見出した。
本発明は上記知見に基づいてなされたものであって、回転軸線を含む平面上の断面形状が当該回転軸の周りの全周で等しい磁気発生部と、前記前記磁気発生部の回転軸を中心とする回転により生じる磁束密度の変化を検出する複数の磁気センサと、からなる回転角度センサにおいて、前記磁気発生部の前記磁気センサに対向する部分は、周辺部分の方がその他の部分よりも前記磁気センサとの間の距離が大になるように構成されていることを特徴とする。
ここで、前記磁気発生部の前記磁気センサに対向する部分は、当該磁気発生部の周縁に向かって傾斜または曲面が形成されていることとすることができる。
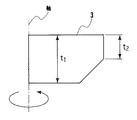
また、前記回転軸線を含む平面上の断面における、前記磁気発生部の最大厚さt1と周辺部の厚さt2がt1>t2となっていることとすることができる。
さらに、前記断面の最大厚さt1と前記周辺部の厚さt2がt1>t2≧0.5×t1となっていることとすることができる。
さらに、前記磁気発生部の前記磁気センサに対向する部分は、前記周辺部の傾斜または曲線の平均線とその他の部分との間の角度が0.5度以上45度以下であることとすることができる。
さらに、前記磁気発生部の前記磁気センサに対向する部分は、段差が形成されていることとすることができる。
さらに、前記段差は、半径が異なる円板を積層して形成されていることとすることができる。
本発明によれば、磁気発生部と複数の磁気センサから構成される回転角度センサにおいて、ケース本体の構造に依存することなく、軸ずれによって生ずる角度誤差を低減することができる。これにより、磁気センサ等の電気部品と磁石等の機械部品がそれぞれ異なるケースに封入されたような場合でも軸ずれによる角度誤差を低減した回転角度センサが得られる。
図4は本発明にかかる回転角度センサの基本構造の一例を示すものであって、(a)は磁気発生部の底面図、(b)は磁気発生部の側面図であり、磁気発生部3と磁気センサ4,5との間の位置関係も示してある。すなわち、回転軸線を含む平面上の断面形状が当該回転軸の周りの全周で等しい磁気発生部の一例としての、円板状に形成された永久磁石を含む磁気発生部3は、径方向に着磁されており、また、回転軸6に支持され、この回転軸6を中心として回転する。磁気センサ4および5は、例えばホール素子からなり、共に磁気発生部3の周辺部の直下に配置されており、且つ、(a)に示すように、磁気発生部3の円の中心Oと磁気センサ4とを通る直線、および中心Oと磁気センサ5とを通る直線とがなす角度が概ね90度になるように配置されている。さらに、磁気発生部3の磁気センサ4,5に対向する部分は、周辺部分の方がその他の部分よりも磁気センサ4,5との間の距離が大になるように構成されている。このように構成されているので、軸ずれが生じても、磁気発生部3の端部での磁束密度変化が緩和される。そのため、例えば、回転角度センサを収容するケース本体の構造に依らずに軸ずれによる角度誤差を低減することが出来る。
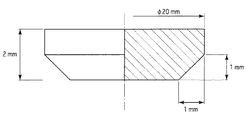
なお、磁気発生部3の構成は、磁気発生部の磁気センサに対向する部分に、当該磁気発生部の周縁に向かって傾斜または曲面を形成することによって実現することができる。その具体例を図5に示す。図5に示すように、回転軸を含む断面における、磁気発生部3の最大厚さt1と最外周部の厚さt2との間の関係はt1>t2となっている。例えば、磁気発生部が均一な磁石から構成されている場合、断面の最大厚さt1に比して最外周部の厚さt2が小さい磁気発生部は、断面の最大厚さt1と周辺部の厚さt2が同じである(t1=t2)磁気発生部より体積が減少することによって磁束密度が低下し回転角度センサの分解能や本来の角度精度が劣化する。また、外部磁場による角度誤差の影響も大きくなるので、概ね、t2の値はt1の値の1/4以上であることが好ましく、さらには1/2以上であることが一層好ましい。
また、磁気発生部3の形状は機械的加工が容易で量産時の安定性が良い形状であれば良く、当該磁気発生部の磁気センサに対向する部分の一例としての、傾斜を構成する部分の形状は、図6の(a),(b),(c),(d)に例示するように、直線でも曲線でも良い。また、直線と曲線を併用しても良く、複数の変曲点を持つ曲線でも良い。前記周辺部の傾斜または曲線の平均線とその他の部分との間の角度は0.5度以上45度以下であることが好ましい。前記角度が大きくなると磁束密度の変化が急峻になるため所期の目的とする効果を得ることが出来ない。従って、この角度は制限を受け、概ね0.5度から45度の範囲内にすることが好ましく、さらには、9度から30度の範囲内であることがより好ましい。
さらに、磁気発生部3の構成は、その全てを磁石によって構成してもよく、磁石と磁性体の組み合わせによって構成しても良い。図7の(a),(b),(c),(d)にその各例を示す。磁石と磁性体の組み合わせによって断面形状を構成する場合は、磁石が生成する磁束が磁性体内だけを通過し、磁気センサを通過しないような「閉磁気回路」にならないようにすることが肝要である。なお、(a)は、半径が異なる磁性体の円板3aを積層して、磁気発生部3の磁気センサに対向する部分に、段差を形成したものである。
さらに、図7の(a)〜(d)は、回転軸線を含む平面上の断面形状が当該回転軸の周りの全周で等しい磁気発生部として、円板上の磁気発生部の構成の各例を示したが、回転軸線を含む平面上の断面形状が当該回転軸の周りの全周で等しい磁気発生部の他の例としては、図8に示すようなリング状の構造の磁気発生部であっても良い。図8の(a)は、リング状の磁気発生部13の平面図、(b)は、そのA−A断面図であり、リング状の磁気発生部13は、永久磁石で構成され、径方向に着磁され、磁性体または非磁性体からなる4個の支持部材11によって回転軸12に固定されている。
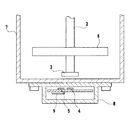
なお、磁気発生部と磁気センサ(センサ回路基板)とが異なるケースに収容されている例を図9に示す。6は回転軸2に固定されたギアであり、回転軸2の下端には磁気発生部3が取り付けられており、これらはギアケース7内に収容されている。このギアケース7の下にはセンサケース8が設けられており、このセンサケース8内にはセンサ回路基板9が収容されており、このセンサ回路基板9上に磁気センサ4,5が取り付けられている。このような構成においても、回転軸の軸ずれによる角度誤差は最小に抑えられる。
以下に本発明の実施例を比較例(従来例)とともに説明する。
(比較例)
まず、比較例として、次の条件で回転角度センサを構成した。
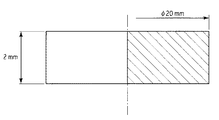
磁石(磁気発生部):ネオジウム磁石20mmΦ 厚み2mmt(図10)
磁気センサ:ホール素子(2個)
磁気センサと磁石底面との距離:1.0mm
なお、磁石とホール素子との位置関係は図2の通りである。このような構成の比較回転角度センサによる各軸ずれ量(mm)と、各軸ずれ量のときに磁気センサによって測定された角度誤差(±角度)との関係を調べた。
(比較例)
まず、比較例として、次の条件で回転角度センサを構成した。
磁石(磁気発生部):ネオジウム磁石20mmΦ 厚み2mmt(図10)
磁気センサ:ホール素子(2個)
磁気センサと磁石底面との距離:1.0mm
なお、磁石とホール素子との位置関係は図2の通りである。このような構成の比較回転角度センサによる各軸ずれ量(mm)と、各軸ずれ量のときに磁気センサによって測定された角度誤差(±角度)との関係を調べた。
(実施例1)
ついで、本発明の実施例1として、次の条件で回転角度センサを構成した。磁気発生部の断面形状(寸法)は図10の通りであり、全てを磁石で構成した。
磁石(磁気発生部):ネオジウム磁石20mmΦ 厚み2mmt(図11)
磁気センサ:ホール素子(2個)
磁気センサと磁石底面(傾斜部以外の平面)との距離:1.0mm
ついで、本発明の実施例1として、次の条件で回転角度センサを構成した。磁気発生部の断面形状(寸法)は図10の通りであり、全てを磁石で構成した。
磁石(磁気発生部):ネオジウム磁石20mmΦ 厚み2mmt(図11)
磁気センサ:ホール素子(2個)
磁気センサと磁石底面(傾斜部以外の平面)との距離:1.0mm
なお、磁石とホール素子との位置関係は図4の通りである。このような構成の本発明回転角度センサ1による各軸ずれ量(mm)と、各軸ずれ量のときに磁気センサによって測定された角度誤差(±角度)との関係を調べた。
(実施例2)
ついで、本発明の実施例2として、次の条件で回転角度センサを構成した。磁気発生部の断面形状(寸法)は図11の通りであり、全てを磁石で構成した。
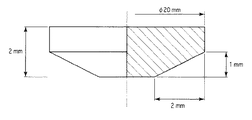
磁石(磁気発生部):ネオジウム磁石20mmΦ 厚み2mmt(図12)
磁気センサ:ホール素子(2個)
磁気センサと磁石底面(傾斜部以外の平面)との距離:1.0mm
なお、磁石とホール素子との位置関係は図4の通りである。このような構成の本発明回転角度センサ2による各軸ずれ量(mm)と、各軸ずれ量のときに磁気センサによって測定された角度誤差(±角度)との関係を調べた。
ついで、本発明の実施例2として、次の条件で回転角度センサを構成した。磁気発生部の断面形状(寸法)は図11の通りであり、全てを磁石で構成した。
磁石(磁気発生部):ネオジウム磁石20mmΦ 厚み2mmt(図12)
磁気センサ:ホール素子(2個)
磁気センサと磁石底面(傾斜部以外の平面)との距離:1.0mm
なお、磁石とホール素子との位置関係は図4の通りである。このような構成の本発明回転角度センサ2による各軸ずれ量(mm)と、各軸ずれ量のときに磁気センサによって測定された角度誤差(±角度)との関係を調べた。
(実施例3)
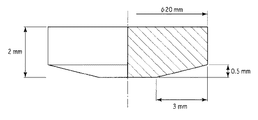
ついで、本発明の実施例3として、次の条件で回転角度センサを構成した。磁気発生部の断面形状(寸法)は図12の通りであり、全てを磁石で構成した。
磁石(磁気発生部):ネオジウム磁石20mmΦ 厚み2mmt(図13)
磁気センサ:ホール素子(2個)
磁気センサと磁石底面(傾斜部以外の平面)との距離:1.0mm
なお、磁石とホール素子との位置関係は図4の通りである。このような構成の本発明回転角度センサ3による各軸ずれ量(mm)と、各軸ずれ量のときに磁気センサによって測定された角度誤差(±角度)との関係を調べた。
ついで、本発明の実施例3として、次の条件で回転角度センサを構成した。磁気発生部の断面形状(寸法)は図12の通りであり、全てを磁石で構成した。
磁石(磁気発生部):ネオジウム磁石20mmΦ 厚み2mmt(図13)
磁気センサ:ホール素子(2個)
磁気センサと磁石底面(傾斜部以外の平面)との距離:1.0mm
なお、磁石とホール素子との位置関係は図4の通りである。このような構成の本発明回転角度センサ3による各軸ずれ量(mm)と、各軸ずれ量のときに磁気センサによって測定された角度誤差(±角度)との関係を調べた。
(実施例4)
ついで、本発明の実施例4として、次の条件で回転角度センサを構成した。磁気発生部の断面形状(寸法)は図12の通りであり、全てを磁石で構成した。
磁石(磁気発生部):ネオジウム磁石20mmΦ 厚み2mmt(図14)
磁気センサ:ホール素子(2個)
磁気センサと磁石底面(傾斜部以外の平面)との距離:1.0mm
ついで、本発明の実施例4として、次の条件で回転角度センサを構成した。磁気発生部の断面形状(寸法)は図12の通りであり、全てを磁石で構成した。
磁石(磁気発生部):ネオジウム磁石20mmΦ 厚み2mmt(図14)
磁気センサ:ホール素子(2個)
磁気センサと磁石底面(傾斜部以外の平面)との距離:1.0mm
なお、磁石とホール素子との位置関係は図4の通りである。このような構成の本発明回転角度センサ4による各軸ずれ量(mm)と、各軸ずれ量のときに磁気センサによって測定された角度誤差(±角度)との関係を調べた。
以上の比較回転角度センサと、本発明回転角度センサ1〜4の各軸ずれ量と角度誤差とを表1にまとめて示す。
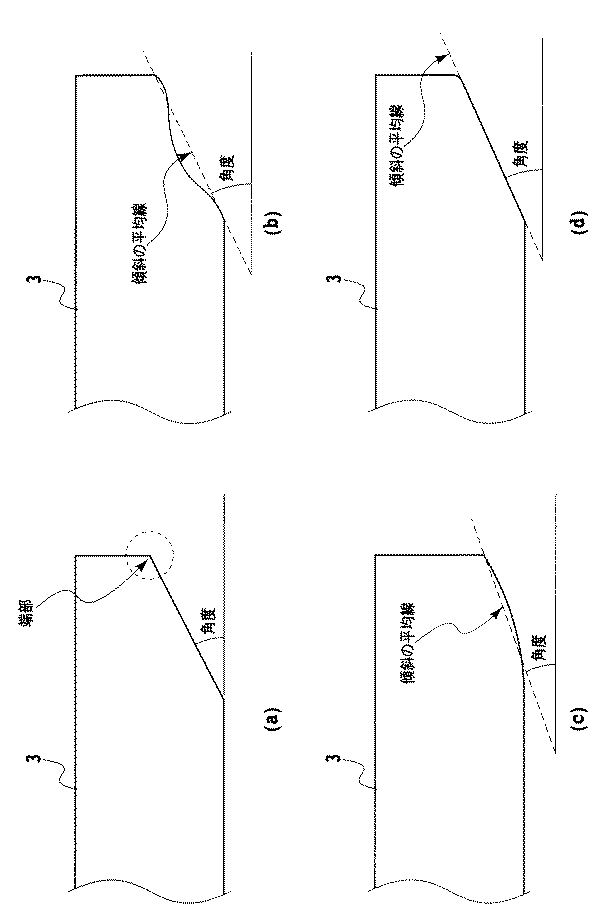
表1に示すように、本発明によれば、角度誤差が効果的に抑えられていることが明らかである。なお、以上の関係をグラフにして図15に示す。
本発明の応用例は、例えば、スロットルポジションセンサやモーターや手動動力によってギア位置を切り替える、2WD−4WD切替器やオートマチックシフト切替器などの回転位置センサに適用できる。
2 回転軸
3 磁気発生部
4,5 磁気センサ
3 磁気発生部
4,5 磁気センサ
Claims (7)
- 回転軸線を含む平面上の断面形状が当該回転軸の周りの全周で等しい磁気発生部と、前記磁気発生部の回転軸を中心とする回転により生じる磁束密度の変化を検出する複数の磁気センサと、からなる回転角度センサにおいて、
前記磁気発生部の前記磁気センサに対向する部分は、周辺部分の方がその他の部分よりも前記磁気センサとの間の距離が大になるように構成されていることを特徴とする回転角度センサ。 - 前記磁気発生部の前記磁気センサに対向する部分は、当該磁気発生部の周縁に向かって傾斜または曲面が形成されていることを特徴とする請求項1に記載の回転角度センサ。
- 前記回転軸線を含む断面における、前記磁気発生部の最大厚さt1と周辺部の厚さt2がt1>t2となっていることを特徴とする請求項2に記載の回転角度センサ。
- 前記断面の最大厚さt1と前記周辺部の厚さt2がt1>t2≧0.5×t1となっていることを特徴とする請求項3に記載の回転角度センサ。
- 前記磁気発生部の前記磁気センサに対向する部分は、前記周辺部の傾斜または曲線の平均線とその他の面との間の角度が0.5度以上45度以下であることを特徴とする請求項2に記載の回転角度センサ。
- 前記磁気発生部の前記磁気センサに対向する部分は、段差が形成されていることを特徴とする請求項1に記載の回転角度センサ。
- 前記段差は、半径が異なる円板を積層して形成されていることを特徴とする請求項6に記載の回転角度センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004107910A JP2005291942A (ja) | 2004-03-31 | 2004-03-31 | 回転角度センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004107910A JP2005291942A (ja) | 2004-03-31 | 2004-03-31 | 回転角度センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005291942A true JP2005291942A (ja) | 2005-10-20 |
Family
ID=35325027
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004107910A Withdrawn JP2005291942A (ja) | 2004-03-31 | 2004-03-31 | 回転角度センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005291942A (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009281978A (ja) * | 2008-05-26 | 2009-12-03 | Asahi Kasei Electronics Co Ltd | 回転角度センサ |
| JPWO2008050581A1 (ja) * | 2006-10-26 | 2010-02-25 | 古河電気工業株式会社 | 回転角度検出装置 |
| JP2010066203A (ja) * | 2008-09-12 | 2010-03-25 | Mitsubishi Electric Corp | 可動部の位置検出装置、2自由度アクチュエータ |
| DE112010003574T5 (de) | 2009-09-08 | 2012-10-04 | Ntn Corp. | Drehwinkel-Erfassungssensor |
| KR20150100746A (ko) * | 2012-12-21 | 2015-09-02 | 알레그로 마이크로시스템스, 엘엘씨 | 자기장 센서 배치들 및 관련 방법들 |
| CN104976949A (zh) * | 2014-04-14 | 2015-10-14 | 罗伯特·博世有限公司 | 用于无接触式旋转角检测的测量装置 |
| JP2017161470A (ja) * | 2016-03-11 | 2017-09-14 | Tdk株式会社 | 回転角度検出装置 |
| JP2017161471A (ja) * | 2016-03-11 | 2017-09-14 | Tdk株式会社 | 回転角度検出装置及び回転機械装置 |
| JP2018063209A (ja) * | 2016-10-14 | 2018-04-19 | ミネベアミツミ株式会社 | アブソリュートエンコーダ |
| CN113390440A (zh) * | 2020-03-11 | 2021-09-14 | 深圳绿米联创科技有限公司 | 检测目标物位置状态的方法、装置以及存储介质 |
| US11150125B2 (en) | 2017-06-07 | 2021-10-19 | Aisan Kogyo Kabushiki Kaisha | Method for producing remaining fuel detection device and fuel supply module |
-
2004
- 2004-03-31 JP JP2004107910A patent/JP2005291942A/ja not_active Withdrawn
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2008050581A1 (ja) * | 2006-10-26 | 2010-02-25 | 古河電気工業株式会社 | 回転角度検出装置 |
| JP2009281978A (ja) * | 2008-05-26 | 2009-12-03 | Asahi Kasei Electronics Co Ltd | 回転角度センサ |
| JP2010066203A (ja) * | 2008-09-12 | 2010-03-25 | Mitsubishi Electric Corp | 可動部の位置検出装置、2自由度アクチュエータ |
| DE112010003574T5 (de) | 2009-09-08 | 2012-10-04 | Ntn Corp. | Drehwinkel-Erfassungssensor |
| US8896297B2 (en) | 2009-09-08 | 2014-11-25 | Ntn Corporation | Rotating angle detecting sensor |
| DE112010003574B4 (de) | 2009-09-08 | 2024-09-19 | Ntn Corp. | Drehwinkel-Erfassungssensor |
| KR102176106B1 (ko) | 2012-12-21 | 2020-11-09 | 알레그로 마이크로시스템스, 엘엘씨 | 물체의 이동을 감지하는 센서 및 물체의 이동을 감지하는 방법 |
| KR20150100746A (ko) * | 2012-12-21 | 2015-09-02 | 알레그로 마이크로시스템스, 엘엘씨 | 자기장 센서 배치들 및 관련 방법들 |
| CN104976949A (zh) * | 2014-04-14 | 2015-10-14 | 罗伯特·博世有限公司 | 用于无接触式旋转角检测的测量装置 |
| JP2017161471A (ja) * | 2016-03-11 | 2017-09-14 | Tdk株式会社 | 回転角度検出装置及び回転機械装置 |
| CN107179094A (zh) * | 2016-03-11 | 2017-09-19 | Tdk株式会社 | 旋转角度检测装置 |
| CN107179094B (zh) * | 2016-03-11 | 2019-12-17 | Tdk株式会社 | 旋转角度检测装置 |
| US10775195B2 (en) | 2016-03-11 | 2020-09-15 | Tdk Corporation | Rotation angle sensing device |
| CN107179045A (zh) * | 2016-03-11 | 2017-09-19 | Tdk株式会社 | 旋转角度检测装置和旋转机械装置 |
| JP2017161470A (ja) * | 2016-03-11 | 2017-09-14 | Tdk株式会社 | 回転角度検出装置 |
| JP2018063209A (ja) * | 2016-10-14 | 2018-04-19 | ミネベアミツミ株式会社 | アブソリュートエンコーダ |
| US11150125B2 (en) | 2017-06-07 | 2021-10-19 | Aisan Kogyo Kabushiki Kaisha | Method for producing remaining fuel detection device and fuel supply module |
| CN113390440A (zh) * | 2020-03-11 | 2021-09-14 | 深圳绿米联创科技有限公司 | 检测目标物位置状态的方法、装置以及存储介质 |
| CN113390440B (zh) * | 2020-03-11 | 2023-10-20 | 深圳绿米联创科技有限公司 | 检测目标物位置状态的方法、装置以及存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5399713B2 (ja) | ハンドル軸の捩じれを特に測定するための、ストロークが短い磁気位置センサー | |
| JP6711362B2 (ja) | 磁気変速機 | |
| JP2005291942A (ja) | 回転角度センサ | |
| JP2013021810A (ja) | 回転電機 | |
| JPWO2008050581A1 (ja) | 回転角度検出装置 | |
| JP2014077758A (ja) | 回転角度検出装置 | |
| JP2010160037A (ja) | 回転角検出器 | |
| JP5252724B2 (ja) | 回転角センサ | |
| JP5202343B2 (ja) | 回転角検出器 | |
| WO2018131693A1 (ja) | センサマグネットアセンブリ、およびモータ | |
| JP4452976B2 (ja) | 磁気ゼネバ歯車機構 | |
| JP7284177B2 (ja) | ロータおよびこれを具備するモータ | |
| US9541373B2 (en) | Magnetic detector equipped with rotor including signal generation unit | |
| JP5440125B2 (ja) | エンコーダ | |
| JP2010249670A (ja) | 回転角センサ | |
| JP7210003B2 (ja) | レゾルバ部のシールド構造 | |
| JP2009038910A (ja) | ブラシレスモータ | |
| JP2006214985A (ja) | ポテンショメータ | |
| JP7209911B1 (ja) | 回転数検出器 | |
| JP5007922B2 (ja) | 磁気式エンコーダ装置 | |
| JP4383231B2 (ja) | 非接触型位置センサ | |
| US6738340B2 (en) | Device for reducing the radial and axial play of a motor shaft in a deck for playing information discs | |
| JP4891855B2 (ja) | 非接触角度センサ | |
| JP2010187505A (ja) | θZ軸リニアモータ | |
| JP2004122087A (ja) | ロータ支持構造 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20070605 |