JP2005291433A - 自動クラッチ装置 - Google Patents
自動クラッチ装置 Download PDFInfo
- Publication number
- JP2005291433A JP2005291433A JP2004109854A JP2004109854A JP2005291433A JP 2005291433 A JP2005291433 A JP 2005291433A JP 2004109854 A JP2004109854 A JP 2004109854A JP 2004109854 A JP2004109854 A JP 2004109854A JP 2005291433 A JP2005291433 A JP 2005291433A
- Authority
- JP
- Japan
- Prior art keywords
- clutch
- learning
- transmission
- automatic
- output side
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
Abstract
【課題】 できるだけ長所が多く、短所が少ない半クラッチ点学習を実行可能とする。
【解決手段】 変速機の入力側に連結されたクラッチをコントローラから出力される指示信号に基づきアクチュエータにより断接操作する自動クラッチ装置において、クラッチの半クラッチ点を学習するための方法であって、変速機がニュートラル状態のとき(ステップ101)、クラッチの出力側を制動しつつ(ステップ107)クラッチを接操作し(ステップ109)、この接続過程でクラッチ出力側回転速度が所定値より大きくなった時(ステップ110)、クラッチのストロークを学習値として記憶する(ステップ111)。従来のニュートラル学習より伝達トルクの高い点を学習できる。
【選択図】 図1
【解決手段】 変速機の入力側に連結されたクラッチをコントローラから出力される指示信号に基づきアクチュエータにより断接操作する自動クラッチ装置において、クラッチの半クラッチ点を学習するための方法であって、変速機がニュートラル状態のとき(ステップ101)、クラッチの出力側を制動しつつ(ステップ107)クラッチを接操作し(ステップ109)、この接続過程でクラッチ出力側回転速度が所定値より大きくなった時(ステップ110)、クラッチのストロークを学習値として記憶する(ステップ111)。従来のニュートラル学習より伝達トルクの高い点を学習できる。
【選択図】 図1
Description
本発明は自動クラッチ装置に係り、特に、車両の自動クラッチ装置であってクラッチ接続速度の切替点等に利用される半クラッチ点の学習を実行可能なものに関する。
通常の摩擦クラッチや湿式多板クラッチ等の摩擦型クラッチを自動断接し得る自動クラッチ装置が公知である。これにおいてクラッチ接続制御を行う場合、クラッチ接続ショックを防止するため、一般に半クラッチ領域手前の半クラッチ点でクラッチの接続速度を遅くする制御を行う。しかし、半クラッチ領域はクラッチの摩耗や変形、取付誤差等により変化するため、このような制御を行うためには随時半クラッチ点を学習する必要がある。
従来、半クラッチ点学習方法として以下のものが知られている。
1)2nd学習
車両停止、変速機ギヤイン、且つパーキングブレーキ作動状態でクラッチを接制御し、エンジン回転速度が所定値に落ち込んだ時、その時のクラッチストロークを学習する方法。
2)ニュートラル学習
車両停止且つ変速機ニュートラル状態でクラッチを接制御し、クラッチが連れ回り始めた時、その時のクラッチストロークを学習する方法(特許文献2参照)。
3)常接クラッチを用いる方法
クラッチが完全接続位置にあるときのクラッチストロークを完接位置として学習し、その値から一定ストロークだけクラッチ断側の点を半クラッチ点として学習する方法。
1)2nd学習
車両停止、変速機ギヤイン、且つパーキングブレーキ作動状態でクラッチを接制御し、エンジン回転速度が所定値に落ち込んだ時、その時のクラッチストロークを学習する方法。
2)ニュートラル学習
車両停止且つ変速機ニュートラル状態でクラッチを接制御し、クラッチが連れ回り始めた時、その時のクラッチストロークを学習する方法(特許文献2参照)。
3)常接クラッチを用いる方法
クラッチが完全接続位置にあるときのクラッチストロークを完接位置として学習し、その値から一定ストロークだけクラッチ断側の点を半クラッチ点として学習する方法。
それぞれの方法の得失は以下の通りである。
1)2nd学習
長所
・クラッチの伝達トルクの高い点のクラッチストロークを学習できる。
・学習値の精度が高い。
短所
・学習のため、ドライバがブレーキを踏みながら学習開始のためのスイッチを操作する必要がある。ドライバのブレーキ操作を要求するのは学習中の車両発進を防止するためである。
・学習時に車両が発進する虞がある。
・学習時にクラッチを断接する必要がある。
2)ニュートラル学習
長所
・学習時の動作が簡単である。
・クラッチの連れ回り点を学習できる。
・ドライバの操作が不要である。
・学習時に車両発進の虞がない。
短所
・クラッチの伝達トルクの低い点しか学習できない。
・学習時にクラッチを断接する必要がある。
3)常接クラッチを用いる方法
長所
・学習のためにクラッチを動作させる必要がない。
・ドライバの操作が不要。
・学習時に車両発進の虞がない。
短所
・半クラッチ幅のバラツキを吸収できない。
・この方法にしか適用できない。
1)2nd学習
長所
・クラッチの伝達トルクの高い点のクラッチストロークを学習できる。
・学習値の精度が高い。
短所
・学習のため、ドライバがブレーキを踏みながら学習開始のためのスイッチを操作する必要がある。ドライバのブレーキ操作を要求するのは学習中の車両発進を防止するためである。
・学習時に車両が発進する虞がある。
・学習時にクラッチを断接する必要がある。
2)ニュートラル学習
長所
・学習時の動作が簡単である。
・クラッチの連れ回り点を学習できる。
・ドライバの操作が不要である。
・学習時に車両発進の虞がない。
短所
・クラッチの伝達トルクの低い点しか学習できない。
・学習時にクラッチを断接する必要がある。
3)常接クラッチを用いる方法
長所
・学習のためにクラッチを動作させる必要がない。
・ドライバの操作が不要。
・学習時に車両発進の虞がない。
短所
・半クラッチ幅のバラツキを吸収できない。
・この方法にしか適用できない。
このように、各学習方法にはそれぞれの長所短所があり、できるだけ長所が多く、短所が少ない学習を実行可能な装置及び方法が望まれている。
本発明の第1の態様によれば、摩擦型のクラッチと、このクラッチの出力側に連結された変速機と、前記クラッチを断接操作するアクチュエータと、このアクチュエータに断接操作のための指示信号を出力するコントローラとを備えた車両の自動クラッチ装置において、車速を検出する手段と、前記変速機の位置を検出する手段と、前記クラッチのストロークを検出する手段と、車速ゼロ且つ変速機ニュートラルという条件下でクラッチ接操作を実行せしめ、前記クラッチが連れ回りを開始した時のクラッチストロークを学習値として記憶する半クラッチ点学習を実行する手段と、この学習中に前記クラッチの出力側を制動する手段とを備えたことを特徴とする車両の自動クラッチ装置が提供される。
前記制動する手段は、前記変速機に設けられたカウンタシャフトブレーキからなってもよい。
前記クラッチの出力側の回転速度を検出する手段を備え、前記クラッチの連れ回り開始時が、前記クラッチ出力側の回転速度が所定値より大きくなった時であるのが好ましい。
または、前記クラッチの入力側に連結されたエンジンの回転速度を検出する手段を備え、前記クラッチの連れ回り開始時が、前記エンジン回転速度が所定値より落ち込んだ時であってもよい。
本発明の第2の態様によれば、変速機の入力側に連結された摩擦型のクラッチを、コントローラから出力される指示信号に基づきアクチュエータにより断接操作する自動クラッチ装置において、前記クラッチの半クラッチ点を学習するための方法であって、前記変速機がニュートラル状態のとき、前記クラッチの出力側を制動しつつ前記クラッチを接操作し、この接続過程で所定条件が成立した時、前記クラッチのストロークを学習値として記憶することを特徴とする半クラッチ点学習方法が提供される。
好ましくは、前記所定条件が成立した時が、前記クラッチの出力側回転速度が所定値より大きくなった時又は、前記クラッチの入力側に連結されたエンジンの回転速度が所定値より落ち込んだ時である。
本発明によれば、半クラッチ点学習に関し改良されたニュートラル学習方法が提案され、従来のニュートラル学習より伝達トルクの高い点を学習できるという、優れた効果が発揮される。
以下、本発明の好適な一実施形態を添付図面に基づいて詳述する。
図3に本実施形態に係る自動クラッチ装置を示す。この自動クラッチ装置はトラック等の車両に適用され、クラッチの自動断接のほか、マニュアル断接も可能な所謂セレクティブクラッチシステムの構成が採られている。この装置の構成は本出願人による先願:特許文献4に開示されたものと大略同様である。
自動クラッチ装置1は、摩擦型のクラッチ8を備え、本実施形態においてクラッチ8はマニュアル車に通常適用される摩擦クラッチである。クラッチ8は、流体圧(本実施形態では空圧)で駆動されるアクチュエータ(倍力装置)7により断接操作される。空圧を貯留する圧力源としてのエアタンク5が備えられ、エアタンク5には、エンジンEにより駆動されるコンプレッサから空圧が補給される。空圧がアクチュエータ7に供給されると、アクチュエータ7は伸び側Aに作動してクラッチ8を分断側に操作し、逆に空圧がアクチュエータ7から排出されると、アクチュエータ7は縮み側Bに作動してクラッチ8を接続側に操作する。
クラッチの自動断接を可能にするための回路2が設けられている。一方、クラッチのマニュアル断接を可能にするための回路3も設けられ、この回路3において別の作動流体圧としての油圧により作動される油圧作動弁6が設けられ、油圧作動弁6の開閉によりアクチュエータ7に対する空圧給排制御が可能となっている。この点は後に明らかとなる。
一方の回路2は、第1電磁弁78、第2電磁弁79、第3電磁弁80、シャトル弁(ダブルチェックバルブ)69、第1チェック弁75,第2チェック弁43、第1絞り66及び第2絞り76を含む。第1〜第3電磁弁78〜80は2ウェイ式三方弁であり、コントローラを構成するクラッチ制御用電子制御ユニット(以下クラッチECUという)72から出力されるON/OFF信号に基づいて切り替えられる。各々の電磁弁のON/OFF時の空圧の流れ方向は図3に矢示する通りである。シャトル弁69は機械式三方弁であって両入口側の空圧配管62及び34の空圧差に基づき切り替えられる。第1チェック弁75及び第2チェック弁43は機械式逆止弁である。第1絞り66は第2絞り76より通路面積大である(絞り量が少ない)。
他方の回路3は、油圧作動弁6、マスタシリンダ10、これらを結ぶ油圧配管54、エアタンク5から油圧作動弁6を経由してアクチュエータ7までを結ぶ空圧回路(空圧配管67,34,35及びシャトル弁69を含む)、及びエアタンク5からマスタシリンダ10までを結ぶ空圧回路を含む。マスタシリンダ10は、クラッチペダル9によりマニュアル操作されることができるが、空圧によって自動操作されることもできる。即ち、マスタシリンダ10は第1ピストン47及び第2ピストン48を直列に備え、クラッチペダル9が踏み込まれたときは両ピストン47,48の押動により油圧を排出し、空圧が供給されたときは第2ピストン48のみ押動させて油圧を排出する。このようなマスタシリンダとした理由は後に明らかとなる。
クラッチ8はエンジンEの出力側かつ変速機76の入力側に連結される。変速機76は通常のマニュアル車に適用される平行二軸式変速機で、本実施形態ではマニュアル操作されるようになっており、手動シフトレバー95にリンク等を介して機械的に連結されている。シフトノブ92がシフトレバー95に対し揺動可能に、且つスプリング等で中立位置に付勢されて取り付けられ、ドライバの変速意志を検知すべくノブスイッチ77が内蔵されている。スイッチ反応荷重以上の操作力がシフトノブ92に加わったとき、シフトノブ92が揺動してスイッチ77がONとなり、このON信号がクラッチECU72に出力され、これを合図にクラッチ自動分断が開始される。
変速機76は、クラッチ8の出力軸に連結されたインプットシャフト21と、インプットシャフト21に対し同軸且つ相対回転可能に配置されたアウトプットシャフト22と、これらシャフトに平行に配置されたカウンタシャフト23と、これらシャフトに設けられたギヤ群とを備える。ギヤ群は、インプットシャフト21に固定されたインプットギヤ25と、インプットギヤ25に噛合されカウンタシャフト23に固定された第1カウンタギヤ26とを含む。これによりカウンタシャフト23はクラッチ8の出力軸及びインプットシャフト21と同期回転することになる。またギヤ群は、周知のように、常時噛合されるギヤ組を各変速段毎に有し、ギヤ組のうちの一方のギヤはカウンタシャフト23に固定されるカウンタギヤであり、他方のギヤはアウトプットシャフト22に回転可能に取り付けられるアウトプットギヤである。そしていずれか一の変速段を選択すべく、スリーブやスプライン等からなる同期装置27が各変速段毎に設けられている。
特にこの変速機76にはカウンタシャフトブレーキ(CSB)28が備えられている。一般にCSBは、カウンタシャフトの回転にブレーキをかけるためのもので、通常、コスト低減や変速機の全長短縮等のため、複数の同期装置のうちのいくつかからシンクロナイザを省略した場合に適用される。この場合、主にシフトアップ時にCSBが作動されて次の変速段に対する同期制御が実行される。またCSBは、ツインクラッチ等の比較的切れが悪いクラッチを強制的に引き剥がすために使用されることもある。
本実施形態では、いくつかの同期装置27からシンクロナイザが省略されているためCSB28が設けられている。CSB28は、カウンタシャフト23にギヤ組を介して連動連結される回転軸30、回転軸30を制動すべく設けられたクラッチ(本実施形態では湿式多板クラッチ)31、及び流体圧(本実施形態では空圧)で作動されクラッチ31を固定側に対し係合・解除するためのピストン32を備える。CSB28に空圧が供給されるとピストン32が押動されてクラッチ31が接せられ、カウンタシャフト23が制動される。逆にCSB28から空圧が排出されるとピストン32がリターンスプリング等により復帰移動され、クラッチ31が断され、カウンタシャフト23の制動が解除される。CSB28への空圧供給制御を実行するため第4電磁弁81が設けられる。
上記の他クラッチECU72には、エンジン回転速度を検出するためのセンサ93,クラッチストロークを検出するためのセンサ88、変速機のインプットシャフト21の回転速度を検出するためのセンサ94、変速機のアウトプットシャフト22の回転速度を検出するためのセンサ85、クラッチペダル9の踏み込みを検知するためのスイッチ87、クラッチペダル9の踏み込みストロークを検知するためのセンサ89,変速機76のセレクト方向の位置を検出するためのセンサ51、変速機76のシフト方向の位置を検出するためのセンサ52、パーキングブレーキ41の作動を検出するためのスイッチ42、エアタンク5の圧力スイッチ86、非常スイッチ84等が接続されている。
クラッチECU72は、センサ85で検出されたアウトプットシャフト回転速度を車速に換算する。またクラッチECU72は、センサ51,52の出力に基づき、ニュートラルを含む変速機76の現在位置を特定する。そしてクラッチECU72は、センサ94で検出されたインプットシャフト回転速度をカウンタシャフト回転速度にギヤ比を用いて換算する。
エンジン制御用電子制御ユニット(以下エンジンECUという)53がクラッチECU72にバスケーブル等を介して連絡可能に接続され、このエンジンECU53からもコントローラが構成されている。エンジンECU53には、アクセルペダル75の踏み込みを検出するためのスイッチ83と、その踏み込み量を検出するためのセンサ82とが接続されている。
次に本実施形態の作用を説明する。
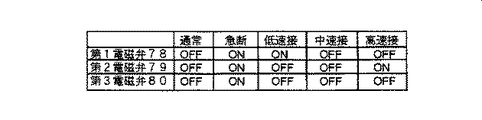
まず、クラッチの自動断接制御について説明する。本装置では、一種類のクラッチ分断速度(急断)と、三種類のクラッチ接続速度(低速接、中速接、高速接)とが選択可能となっている。各々の場合の電磁弁78〜80のON/OFFの組合せは図4に示される通りである。なお通常時(マニュアル断接時を含む)はいずれの電磁弁78〜80もOFFである。
クラッチ分断時(急断時)はいずれの電磁弁78〜80もONとされる。こうなるとエアタンク5の空圧が第1電磁弁78→第2電磁弁79→シャトル弁69と流れてアクチュエータ7に供給され、アクチュエータ内部のピストンを押動してアクチュエータ7を伸び側Aに作動させる。これによりクラッチは急断される。
クラッチ高速接時は第1電磁弁78がOFF、第2電磁弁79がON、第3電磁弁80がOFFとされる。こうなるとアクチュエータ7にある空圧がシャトル弁69→第2電磁弁79→第1電磁弁78→排気ブリーザ37という経路で逆流する。この経路には途中に絞りがないので排気は速やかに行われる。これによってアクチュエータ内部のピストンが復帰移動し、アクチュエータ7が縮み側Bに高速で作動してクラッチ8が高速接される。
クラッチ中速接時は第1電磁弁78がOFF、第2電磁弁79がOFF、第3電磁弁80がOFFとされる。こうなるとアクチュエータ7にある空圧がシャトル弁69→第2電磁弁79→第1絞り66→チェック弁75→第1電磁弁78→排気ブリーザ37という経路で逆流する。第1絞り66の通路面積が比較的大きいので排気速度は若干減速されるに止どまる。なお少量の空圧が第2絞り76からリークしブリーザ37から排気される。こうしてアクチュエータ内部のピストンが中速で復帰移動し、クラッチ8が中速接される。
クラッチ低速接時は第1電磁弁78がON、第2電磁弁79がOFF、第3電磁弁80がOFFとされる。こうなるとアクチュエータ7にある空圧がシャトル弁69→第2電磁弁79→第2絞り76→排気ブリーザ37という経路で逆流する。第2絞り76の通路面積が比較的小さいので排気速度は低速となる。第1電磁弁78がONなのでエアタンク5の空圧がチェック弁75を閉じ、この部分における逆流が阻止される。こうしてアクチュエータ内部のピストンが低速で復帰移動し、クラッチ8が低速接される。
一方、クラッチの自動分断時に第3電磁弁80がONとされることから、エアタンク5の空圧がマスタシリンダ10に供給される。するとマスタシリンダ10の第2ピストン48が空圧で押動されて油圧を排出させる。この油圧は油圧作動弁6に供給される。こうする理由は、アクチュエータ7内部のピストンが空圧でクラッチ断側に移動すると、油圧作動弁6がその構造上、内部の油圧通路を増大させてしまうからである(特許文献4参照)。従ってこれによる油圧通路内の負圧化及び気泡混入を防止するため、クラッチ自動分断時に油圧作動弁6に油圧を供給し、油圧通路内を加圧するようにしている。
実際の変速時のクラッチ自動断接操作については、ドライバが変速しようとしてシフトノブに力を加えると、ノブスイッチ77がONとなり、この信号を合図にクラッチECU72が第1及び第3電磁弁78,80をONとし、僅かな時間差を隔てて第2電磁弁79をONとする。これにより予め油圧作動弁6に油圧を付加した状態でクラッチが急断される。この後、ドライバの変速操作により変速が完了すると、クラッチECU72がその事実をセンサ51,52の出力から検知し、第1〜第3電磁弁78〜80を所望のクラッチ接続速度に応じて切り替える。こうしてクラッチが接続され、一連の変速動作が完了する。
次に、クラッチのマニュアル断接操作について説明する。クラッチ断については、ドライバがクラッチペダル9を踏み込むと、マスタシリンダ10から油圧が排出され、油圧作動弁6が開方向に作動されてその内部の空圧通路を開放する。この空圧通路には独立した空圧配管67から空圧が常時供給されており、空圧は油圧作動弁6→空圧配管34→シャトル弁69→空圧配管35という経路を経てアクチュエータ7に供給される。これによりクラッチ8が分断される。
クラッチ接については、前記と逆に、クラッチペダル9の戻し操作により油圧作動弁6から油圧が抜かれ、油圧作動弁6が閉方向に作動される。こうなるとアクチュエータ7内の空圧が空圧配管35→シャトル弁69→空圧配管34と逆流してブリーザ37から排出される。
油圧作動弁6は、供給された油圧の大きさに応じた量の空気を通過させる構造となっている。従ってクラッチペダル9の踏み込みストロークに比例したクラッチストロークを得ることができる。クラッチペダル9が踏み込まれるとスイッチ87がONとなり、これによりクラッチECU72はクラッチがマニュアル操作されていることを判断して電磁弁78〜80をOFFにする。
このようなマニュアル断接を併用する利点は、例えば、車両発進時にマニュアル操作のみによってクラッチを接し、複雑な発進時クラッチ制御を回避し、制御の簡略化を図れる点である。また、クラッチ制御系統に失陥が生じたときにマニュアル操作による車両の走行を確保できる点である。
ところで、クラッチの自動接続に際して、接続時間短縮と接続ショック防止とを両立するため、クラッチ接続速度を途中で切り替える必要がある。即ち、クラッチの半クラッチ領域手前までは高速で接し、半クラッチ領域内では低速で接し、半クラッチ領域を脱したら高速で接するという具合である。従って、半クラッチ点、即ちクラッチ接続過程で最初に所定トルクを伝達する点を、コントローラに記憶させる必要がある。この点が接続速度を高速から低速に切り替える基準点となるからである。
図6は、クラッチストロークとクラッチ伝達トルクとの関係を示しており、これから理解されるように、摩耗等により経時劣化したクラッチでは、同一トルクを伝達するクラッチストロークの値が新品クラッチに比較して接側に移動する。従って随時(例えば点検時等)、半クラッチ点を学習更新する必要がある。
また図には前述した各半クラッチ点学習方法の比較が示される。これから分かるように、ニュートラル学習が行われるときの伝達トルクは2nd学習の場合より低い値であり、ニュートラル学習点は2nd学習点より断側の値である。なお常接クラッチによる方法ではクラッチ完接点に相当するクラッチストロークが学習点となる。
特に、本発明の半クラッチ点学習方法は従来のニュートラル学習の改良に関わる。そこでまず、本装置において従来のニュートラル学習を実行した場合の例を図5のフローチャートを用いて説明する。
まず、ステップ501〜504において、学習開始条件が成立しているか否かを判断する。即ち、クラッチECU72において、変速機ニュートラルという条件が成立しているか否かをセンサ51,52の出力に基づき判断し(ステップ501)、次いでパーキングブレーキ作動中という条件が成立しているか否かをスイッチ42の出力に基づき判断し(ステップ502)、次いで車両停止中(車速ゼロ)という条件が成立しているか否かをセンサ85の出力に基づき判断し(ステップ503)、次いでクラッチペダルが踏み込まれていないという条件が成立しているか否かをスイッチ87の出力に基づき判断する(ステップ504)。
いずれの条件も成立ならば第1〜第3電磁弁78〜80を切り替え、クラッチの自動分断を開始する(ステップ505)。そしてクラッチが完断されたか否かをクラッチストロークセンサ88の出力に基づき判断する(ステップ506)。クラッチが完断されたならば、センサ94の出力に基づきクラッチの回転(クラッチ出力軸の回転=変速機インプットシャフトの回転)が停止したか否かを判断する(ステップ507)。クラッチが完断されていてもクラッチ出力側が惰性で回転していることがあるからである。クラッチの回転が停止したならば、次に、クラッチの自動緩接(低速接)を開始する(ステップ508)。
その後、センサ94の出力に基づき、クラッチの回転速度(クラッチ出力軸の回転速度=変速機インプットシャフトの回転速度)が予め定められたしきい値より大きくなったか否かを判断する(ステップ509)。ここでしきい値は比較的小さな値で、クラッチの最初の連れ回り時に見られるクラッチ出力軸の回転速度である。クラッチ回転速度がしきい値を越えたら、その時のクラッチストローク(センサ88の出力値)を学習値としてクラッチECU72に記憶する(ステップ510)。
このような従来例に対し、本実施形態に係る装置では、学習操作実行中にクラッチ出力側を制動する点に特徴がある。この制動はCSB28によって実行される。
図1は本装置における改良されたニュートラル学習方法のフローチャートである。図5と見比べれば分かるように、改良されたニュートラル学習方法は、CSB28を作動させる点(ステップ107)が追加されたことのみ異なり、その他は従来方法と同一である。CSB28を作動させるのは、クラッチ完断後(ステップ106)かつ、クラッチ回転停止判断(ステップ108)前であるのが好ましく、このときクラッチECU72により第4電磁弁81がONされ、CSB28に空圧が供給される。なお図示省略するが、学習終了後はCSB28が解除(第4電磁弁81がOFF)されクラッチが急接(高速接)される。
CSB28が作動されると、カウンタシャフト23が制動され、ひいてはインプットシャフト21及びクラッチ出力軸が制動される。従って、図1のフローにおいてクラッチ回転速度がしきい値より大きくなるのは(ステップ110)、図2に示されるように、従来の連れ回りトルクより大きいトルクをクラッチが伝達しているときである。より言えば、クラッチ伝達トルクが(CSB制動トルク)+(変速機内部の摩擦トルク等)を上回り、制動に抗じてクラッチ出力軸を強制的に回転させたときである。
この改良された方法によれば、従来のニュートラル学習に比べ、伝達トルクのより高い点を学習することができる。その伝達トルクとしては2nd学習並みかそれ以上である。そしてCSBの制動トルクが安定しているため、2nd学習よりも正確な学習が可能となる。特にCSBは本来シンクロナイザを持たない変速機に同期制御等のため使用されるものだが、本装置はこのCSBを利用して新たなニュートラル学習方法を実現している。前述したように制御ソフトの変更も容易である。従って簡便な方法で新たな学習方法を実現できる利点がある。
このほか、学習中に車両を発進させる虞がなく、ドライバによるスイッチ操作が不要という従来の長所はそのまま引き継がれる。
本発明の他の実施形態は様々なものが考えられる。例えば、図1にステップ110’で示されるように、エンジン回転速度が予め定められたしきい値より落ち込んだ時、その時のクラッチストロークを学習する(ステップ111)ようにしてもよい。このしきい値は、ニュートラル学習が通常エンジンのアイドリング中に行われるので、(アイドリング回転速度−α)に等しい値に設定される。これは2nd学習において従来より行われる手法である。
また、上記実施形態は、通常接のクラッチを用いた例であったが、通常断のクラッチを用いてもよい。このようなクラッチとしては湿式多板クラッチなどがある。そして、特許文献3に示されるように、湿式多板クラッチ等の摩擦型クラッチをデューティ制御し、そのデューティ値自体(クラッチストローク値ではない)を半クラッチ点として学習する装置にも本発明は適用可能である。この場合、デューティ値は実際のクラッチストロークの代表値とみなすことができるから、本発明にいう「クラッチストローク」とはそのようなデューティ値をも含む概念である。本発明の制動手段に関しては、前記カウンタシャフトブレーキの他、クラッチ出力軸を直接制動するブレーキ、変速機のインプットシャフトを制動するブレーキ等が考えられる。マニュアル断接が不可能な自動クラッチ、あるいはアクチュエータ等により自動変速される変速機等にも本発明は適用可能である。
1 自動クラッチ装置
7 アクチュエータ
8 クラッチ
28 カウンタシャフトブレーキ
51 セレクト位置検出センサ
52 シフト位置検出センサ
72 クラッチECU
76 変速機
85 アウトプットシャフト回転検出センサ
88 クラッチストロークセンサ
93 エンジン回転検出センサ
94 インプットシャフト回転検出センサ
E エンジン
7 アクチュエータ
8 クラッチ
28 カウンタシャフトブレーキ
51 セレクト位置検出センサ
52 シフト位置検出センサ
72 クラッチECU
76 変速機
85 アウトプットシャフト回転検出センサ
88 クラッチストロークセンサ
93 エンジン回転検出センサ
94 インプットシャフト回転検出センサ
E エンジン
Claims (6)
- 摩擦型のクラッチと、該クラッチの出力側に連結された変速機と、前記クラッチを断接操作するアクチュエータと、該アクチュエータに断接操作のための指示信号を出力するコントローラとを備えた車両の自動クラッチ装置において、
車速を検出する手段と、前記変速機の位置を検出する手段と、前記クラッチのストロークを検出する手段と、車速ゼロ且つ変速機ニュートラルという条件下でクラッチ接操作を実行せしめ、前記クラッチが連れ回りを開始した時のクラッチストロークを学習値として記憶する半クラッチ点学習を実行する手段と、この学習中に前記クラッチの出力側を制動する手段とを備えたことを特徴とする車両の自動クラッチ装置。 - 前記制動する手段が、前記変速機に設けられたカウンタシャフトブレーキからなる請求項1記載の車両の自動クラッチ装置。
- 前記クラッチの出力側の回転速度を検出する手段を備え、前記クラッチの連れ回り開始時が、前記クラッチ出力側の回転速度が所定値より大きくなった時である請求項1又は2記載の車両の自動クラッチ装置。
- 前記クラッチの入力側に連結されたエンジンの回転速度を検出する手段を備え、前記クラッチの連れ回り開始時が、前記エンジン回転速度が所定値より落ち込んだ時である請求項1又は2記載の車両の自動クラッチ装置。
- 変速機の入力側に連結された摩擦型のクラッチを、コントローラから出力される指示信号に基づきアクチュエータにより断接操作する自動クラッチ装置において、前記クラッチの半クラッチ点を学習するための方法であって、
前記変速機がニュートラル状態のとき、前記クラッチの出力側を制動しつつ前記クラッチを接操作し、この接続過程で所定条件が成立した時、前記クラッチのストロークを学習値として記憶することを特徴とする半クラッチ点学習方法。 - 前記所定条件が成立した時が、前記クラッチの出力側回転速度が所定値より大きくなった時又は、前記クラッチの入力側に連結されたエンジンの回転速度が所定値より落ち込んだ時である請求項5記載の半クラッチ点学習方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004109854A JP2005291433A (ja) | 2004-04-02 | 2004-04-02 | 自動クラッチ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004109854A JP2005291433A (ja) | 2004-04-02 | 2004-04-02 | 自動クラッチ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005291433A true JP2005291433A (ja) | 2005-10-20 |
Family
ID=35324581
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004109854A Pending JP2005291433A (ja) | 2004-04-02 | 2004-04-02 | 自動クラッチ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005291433A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011135918A1 (ja) * | 2010-04-28 | 2011-11-03 | アイシン・エーアイ株式会社 | 車両の動力伝達制御装置 |
| JP2012002299A (ja) * | 2010-06-18 | 2012-01-05 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| JP2015218740A (ja) * | 2014-05-14 | 2015-12-07 | トヨタ自動車株式会社 | クラッチの制御装置 |
| KR101836725B1 (ko) * | 2016-10-21 | 2018-04-19 | 현대 파워텍 주식회사 | 정지간 클러치 학습 제어 방법 |
| KR101846917B1 (ko) * | 2016-10-12 | 2018-05-28 | 현대자동차 주식회사 | 차량용 클러치 학습 장치 및 방법 |
-
2004
- 2004-04-02 JP JP2004109854A patent/JP2005291433A/ja active Pending
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011135918A1 (ja) * | 2010-04-28 | 2011-11-03 | アイシン・エーアイ株式会社 | 車両の動力伝達制御装置 |
| JP2011231861A (ja) * | 2010-04-28 | 2011-11-17 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| CN102597565A (zh) * | 2010-04-28 | 2012-07-18 | 爱信Ai株式会社 | 车辆动力传递控制装置 |
| US8701516B2 (en) | 2010-04-28 | 2014-04-22 | Aisin Ai Co., Ltd. | Power transmission control apparatus for vehicle |
| CN102597565B (zh) * | 2010-04-28 | 2015-11-25 | 爱信Ai株式会社 | 车辆动力传递控制装置 |
| EP2565485A4 (en) * | 2010-04-28 | 2018-04-18 | AISIN AI Co., Ltd. | Power transmission control device for vehicle |
| JP2012002299A (ja) * | 2010-06-18 | 2012-01-05 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| JP2015218740A (ja) * | 2014-05-14 | 2015-12-07 | トヨタ自動車株式会社 | クラッチの制御装置 |
| US9933025B2 (en) | 2014-05-14 | 2018-04-03 | Toyota Jidosha Kabushiki Kaisha | Control system for clutch |
| KR101846917B1 (ko) * | 2016-10-12 | 2018-05-28 | 현대자동차 주식회사 | 차량용 클러치 학습 장치 및 방법 |
| KR101836725B1 (ko) * | 2016-10-21 | 2018-04-19 | 현대 파워텍 주식회사 | 정지간 클러치 학습 제어 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3598688B2 (ja) | クラッチ断続装置 | |
| CN100480530C (zh) | 用于车辆自动离合器的控制装置和方法 | |
| JP3598847B2 (ja) | クラッチ断接装置 | |
| JP4515592B2 (ja) | 車両の自動変速装置 | |
| KR100253713B1 (ko) | 변속 제어장치 | |
| US6732601B2 (en) | Control apparatus of an automated manual transmission | |
| JP6098530B2 (ja) | クラッチ制御装置 | |
| JP5835573B2 (ja) | 自動変速機のクラッチ制御装置 | |
| JP2005291433A (ja) | 自動クラッチ装置 | |
| JP4284820B2 (ja) | 車両の自動変速装置 | |
| US20040192493A1 (en) | Shift control apparatus of automatic vehicle transmission | |
| JP4343415B2 (ja) | 車両の自動変速装置 | |
| JPH11241734A (ja) | クラッチ自動制御車両 | |
| JP3888153B2 (ja) | 車両の坂道発進補助装置 | |
| JP4426051B2 (ja) | 車両の自動変速装置 | |
| JP2001304002A (ja) | 機械式自動変速機の変速制御装置 | |
| JP4146118B2 (ja) | クラッチの制御方法 | |
| JP3893842B2 (ja) | 車両のオートクラッチ制御装置 | |
| JP4637996B2 (ja) | 車両の自動変速装置 | |
| JP4470272B2 (ja) | 車両の自動変速装置 | |
| JP2002310278A (ja) | 自動変速機 | |
| JPH10274258A (ja) | クラッチ断続装置 | |
| JP3796983B2 (ja) | クラッチ断接装置 | |
| JP4078783B2 (ja) | 車両の自動クラッチ装置 | |
| JP4284825B2 (ja) | 車両の自動変速装置 |