JP2005288163A - 探触子使用をトラッキングするための方法及びシステム - Google Patents
探触子使用をトラッキングするための方法及びシステム Download PDFInfo
- Publication number
- JP2005288163A JP2005288163A JP2005097704A JP2005097704A JP2005288163A JP 2005288163 A JP2005288163 A JP 2005288163A JP 2005097704 A JP2005097704 A JP 2005097704A JP 2005097704 A JP2005097704 A JP 2005097704A JP 2005288163 A JP2005288163 A JP 2005288163A
- Authority
- JP
- Japan
- Prior art keywords
- information
- probe
- ultrasound
- tracking
- memory
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52079—Constructional features
- G01S7/5208—Constructional features with integration of processing functions inside probe or scanhead
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52096—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging related to power management, e.g. saving power or prolonging life of electronic components
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/02—Operational features
- A61B2560/0266—Operational features for monitoring or limiting apparatus function
- A61B2560/0276—Determining malfunction
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Pathology (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
【解決手段】超音波探触子(252)の使用をトラッキングするための方法は、超音波探触子の内部にトラッキング情報を保存する工程(304)と、該超音波探触子の内部に保存したトラッキング情報にアクセスする工程(302)と、を含む。別の実施形態では、超音波システムを提供する。本超音波システムは、超音波スキャナと、トラッキング情報を保存するためのメモリを有する該超音波スキャナに着脱可能に接続可能な超音波探触子と、を含む。
【選択図】 図1
Description
102 送信器
103 読み取りコンポーネント
104 素子
105 書き込みコンポーネント
106 トランスジューサ
107 探触子インタフェース
108 受信器
110 ビーム形成器
112 RFプロセッサ
114 RF/IQバッファ
116 信号プロセッサ
118 表示システム
120 ユーザ入力デバイス
122 画像バッファ
150 超音波システム
152 超音波ボリューム
154 メモリ
156 走査面
158 スライス厚設定制御
160 スライス・メモリ
162 ボリューム・レンダリング・プロセッサ
164 ビデオ・プロセッサ
166 ディスプレイ
168 ボリューム走査変換装置
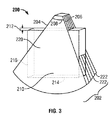
200 被検体
202 ボリューム
204 辺縁
206 辺縁
208 角度
210 レンダリング領域
212 スライス厚
214 スライス幅
216 スライス高
220 撮像部分
222 撮像面
250 超音波システム
252 超音波探触子
253 コネクタ
254 メモリ
256 プロセッサ
258 メモリ
Claims (10)
- 超音波探触子(252)の使用をトラッキングするための方法であって、
超音波探触子の内部にトラッキング情報を保存する工程(304)と、
前記超音波探触子の内部の前記保存したトラッキング情報にアクセスする工程(302)と、
を含む方法。 - 超音波探触子(252)の使用に基づいて前記トラッキング情報を更新する工程(308)と、
前記更新したトラッキング情報を前記超音波探触子の内部に保存する工程(310)と、
をさらに含む請求項1に記載の方法。 - 前記トラッキング情報は使用デュレーション情報を含んでいる、請求項1に記載の方法。
- 前記トラッキング情報は、連続使用情報、個別走査セッション使用情報、走査間時間デュレーション情報及び用法パターン情報のうちの少なくとも1つを含む使用デュレーション情報を含んでいる、請求項1に記載の方法。
- 前記トラッキング情報は動作モード情報を含んでいる、請求項1に記載の方法。
- 超音波探触子(252)の使用をトラッキングするための方法であって、
超音波探触子が超音波システム(250)に接続されている時点を判定する工程と、
前記超音波探触子が前記超音波システムに接続されていると判定されたときに、前記超音波探触子内に保存された探触子走査時間情報及び探触子識別情報にアクセスする工程(302)と、
前記アクセスした探触子走査時間情報及び探触子識別情報を前記超音波システムの内部に保存する工程(304)と、
前記超音波探触子に関する目下の走査時間を計測する工程と、
前記目下の走査時間によって前記走査時間情報を更新する工程(308)と、
前記更新した走査時間情報を前記超音波探触子の内部に保存する工程(310)と、
を含む方法。 - 超音波スキャナと、
トラッキング情報を保存するためのメモリ(254)を有する、前記超音波スキャナに着脱可能に接続可能な超音波探触子(252)と、
を備える超音波システム(250)。 - 前記メモリ(254)は前記超音波スキャナによりアクセスを受けるように構成されている、請求項7に記載の超音波システム(250)。
- 前記超音波スキャナは、前記超音波探触子(252)の内部のメモリから情報を読み取りかつ該メモリに情報を書き込むための探触子インタフェースを備えている、請求項7に記載の超音波システム(250)。
- 前記トラッキング情報は、使用デュレーション情報、用法パターン情報、動作モード情報、温度情報及び温度パワーオフ情報のうちの少なくとも1つを含んでいる、請求項7に記載の超音波システム(250)。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/817,137 US20050228617A1 (en) | 2004-04-02 | 2004-04-02 | Methods and systems for tracking probe use |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005288163A true JP2005288163A (ja) | 2005-10-20 |
| JP2005288163A5 JP2005288163A5 (ja) | 2008-05-15 |
Family
ID=35061676
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005097704A Pending JP2005288163A (ja) | 2004-04-02 | 2005-03-30 | 探触子使用をトラッキングするための方法及びシステム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20050228617A1 (ja) |
| JP (1) | JP2005288163A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007244623A (ja) * | 2006-03-16 | 2007-09-27 | Hitachi Medical Corp | 超音波診断装置 |
| JP2008253500A (ja) * | 2007-04-04 | 2008-10-23 | Toshiba Corp | 超音波診断装置およびその制御処理プログラム、並びに超音波プローブ |
| WO2009139286A1 (ja) * | 2008-05-16 | 2009-11-19 | 株式会社 日立メディコ | 超音波診断装置 |
| JP2017536218A (ja) * | 2014-11-25 | 2017-12-07 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 医療機器の使用を監視するシステム |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11627944B2 (en) | 2004-11-30 | 2023-04-18 | The Regents Of The University Of California | Ultrasound case builder system and method |
| CN102110350B (zh) * | 2009-12-28 | 2014-11-19 | Ge医疗系统环球技术有限公司 | 超声探头故障前告警方法和装置及超声设备 |
| US11631342B1 (en) | 2012-05-25 | 2023-04-18 | The Regents Of University Of California | Embedded motion sensing technology for integration within commercial ultrasound probes |
| JP6162493B2 (ja) * | 2013-06-11 | 2017-07-12 | 東芝メディカルシステムズ株式会社 | 超音波診断装置 |
| US10380919B2 (en) | 2013-11-21 | 2019-08-13 | SonoSim, Inc. | System and method for extended spectrum ultrasound training using animate and inanimate training objects |
| US11600201B1 (en) * | 2015-06-30 | 2023-03-07 | The Regents Of The University Of California | System and method for converting handheld diagnostic ultrasound systems into ultrasound training systems |
| US10896628B2 (en) | 2017-01-26 | 2021-01-19 | SonoSim, Inc. | System and method for multisensory psychomotor skill training |
| US11810473B2 (en) | 2019-01-29 | 2023-11-07 | The Regents Of The University Of California | Optical surface tracking for medical simulation |
| US11495142B2 (en) | 2019-01-30 | 2022-11-08 | The Regents Of The University Of California | Ultrasound trainer with internal optical tracking |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63143306U (ja) * | 1987-03-11 | 1988-09-21 | ||
| JPH03109059A (ja) * | 1989-09-22 | 1991-05-09 | Fuji Electric Co Ltd | 超音波診断装置 |
| JPH06178776A (ja) * | 1992-12-14 | 1994-06-28 | Toshiba Corp | 超音波診断装置 |
| JPH07391A (ja) * | 1993-04-22 | 1995-01-06 | Toshiba Corp | 超音波診断装置 |
| JPH0880301A (ja) * | 1987-10-30 | 1996-03-26 | Hewlett Packard Co <Hp> | 変換器システム |
| JP2002540880A (ja) * | 1999-04-13 | 2002-12-03 | デルテックス リミテッド | 超音波装置およびその制御方法 |
| JP2003290224A (ja) * | 2000-03-17 | 2003-10-14 | Toshiba Corp | 医療用画像診断装置及びその保守管理方法並びにその保守管理システム |
| JP2005058573A (ja) * | 2003-08-19 | 2005-03-10 | Shimadzu Corp | 超音波診断装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5400267A (en) * | 1992-12-08 | 1995-03-21 | Hemostatix Corporation | Local in-device memory feature for electrically powered medical equipment |
| US5487386A (en) * | 1993-04-22 | 1996-01-30 | Kabushiki Kaisha Toshiba | Ultrasonic diagnostic apparatus |
| US6045508A (en) * | 1997-02-27 | 2000-04-04 | Acuson Corporation | Ultrasonic probe, system and method for two-dimensional imaging or three-dimensional reconstruction |
| US6175757B1 (en) * | 1998-02-02 | 2001-01-16 | General Electric Company | Luminal mapping |
| CA2356271A1 (en) * | 1998-12-23 | 2000-07-06 | Image Guided Technologies, Inc. | A hybrid 3-d probe tracked by multiple sensors |
| US6308089B1 (en) * | 1999-04-14 | 2001-10-23 | O.B. Scientific, Inc. | Limited use medical probe |
| US6270460B1 (en) * | 1999-06-24 | 2001-08-07 | Acuson Corporation | Apparatus and method to limit the life span of a diagnostic medical ultrasound probe |
| US6338716B1 (en) * | 1999-11-24 | 2002-01-15 | Acuson Corporation | Medical diagnostic ultrasonic transducer probe and imaging system for use with a position and orientation sensor |
| WO2002044749A1 (en) * | 2000-11-28 | 2002-06-06 | Roke Manor Research Limited | Optical tracking systems |
| US6871086B2 (en) * | 2001-02-15 | 2005-03-22 | Robin Medical Inc. | Endoscopic examining apparatus particularly useful in MRI, a probe useful in such apparatus, and a method of making such probe |
| US6569108B2 (en) * | 2001-03-28 | 2003-05-27 | Profile, Llc | Real time mechanical imaging of the prostate |
| US6675038B2 (en) * | 2001-05-14 | 2004-01-06 | U-Systems, Inc. | Method and system for recording probe position during breast ultrasound scan |
| US7211045B2 (en) * | 2002-07-22 | 2007-05-01 | Ep Medsystems, Inc. | Method and system for using ultrasound in cardiac diagnosis and therapy |
| US7156551B2 (en) * | 2003-06-23 | 2007-01-02 | Siemens Medical Solutions Usa, Inc. | Ultrasound transducer fault measurement method and system |
| US7527591B2 (en) * | 2003-11-21 | 2009-05-05 | General Electric Company | Ultrasound probe distributed beamformer |
-
2004
- 2004-04-02 US US10/817,137 patent/US20050228617A1/en not_active Abandoned
-
2005
- 2005-03-30 JP JP2005097704A patent/JP2005288163A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63143306U (ja) * | 1987-03-11 | 1988-09-21 | ||
| JPH0880301A (ja) * | 1987-10-30 | 1996-03-26 | Hewlett Packard Co <Hp> | 変換器システム |
| JPH03109059A (ja) * | 1989-09-22 | 1991-05-09 | Fuji Electric Co Ltd | 超音波診断装置 |
| JPH06178776A (ja) * | 1992-12-14 | 1994-06-28 | Toshiba Corp | 超音波診断装置 |
| JPH07391A (ja) * | 1993-04-22 | 1995-01-06 | Toshiba Corp | 超音波診断装置 |
| JP2002540880A (ja) * | 1999-04-13 | 2002-12-03 | デルテックス リミテッド | 超音波装置およびその制御方法 |
| JP2003290224A (ja) * | 2000-03-17 | 2003-10-14 | Toshiba Corp | 医療用画像診断装置及びその保守管理方法並びにその保守管理システム |
| JP2005058573A (ja) * | 2003-08-19 | 2005-03-10 | Shimadzu Corp | 超音波診断装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007244623A (ja) * | 2006-03-16 | 2007-09-27 | Hitachi Medical Corp | 超音波診断装置 |
| JP2008253500A (ja) * | 2007-04-04 | 2008-10-23 | Toshiba Corp | 超音波診断装置およびその制御処理プログラム、並びに超音波プローブ |
| WO2009139286A1 (ja) * | 2008-05-16 | 2009-11-19 | 株式会社 日立メディコ | 超音波診断装置 |
| US8359926B2 (en) | 2008-05-16 | 2013-01-29 | Hitachi Medical Corporation | Ultrasonic diagnostic apparatus |
| JP2017536218A (ja) * | 2014-11-25 | 2017-12-07 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 医療機器の使用を監視するシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050228617A1 (en) | 2005-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005288163A (ja) | 探触子使用をトラッキングするための方法及びシステム | |
| KR101140525B1 (ko) | 촬상 영역 확장 방법 | |
| JP6890971B2 (ja) | モデルベースセグメンテーションを用いた像撮像誘導 | |
| CN105491959B (zh) | 弹性成像测量系统和方法 | |
| US8002704B2 (en) | Method and system for determining contact along a surface of an ultrasound probe | |
| CN109303572B (zh) | 超声诊断设备及控制超声诊断设备的方法 | |
| EP3749210B1 (en) | Multi-parametric tissue stiffness quantification | |
| EP3013238B1 (en) | Rib blockage delineation in anatomically intelligent echocardiography | |
| CN113081054B (zh) | 一种超声成像方法以及超声成像系统 | |
| CN110604598B (zh) | 一种超声成像方法以及超声成像系统 | |
| JP2021522004A (ja) | 組織弾性モニタリング及び表示のためのせん断波振幅再構成 | |
| JP2021523765A (ja) | 組織弾性モニタリング及び表示のためのせん断波振幅再構成 | |
| JP5630967B2 (ja) | 画像処理装置及びその制御方法 | |
| CN110494082B (zh) | 超声弹性成像方法和系统 | |
| WO2019172232A1 (ja) | 超音波診断装置および超音波診断装置の制御方法 | |
| CN106170254B (zh) | 超声波观测装置 | |
| US8249692B2 (en) | Method and device for image optimization in ultrasound recordings | |
| CN111329512A (zh) | 激活超声探头的方法、超声成像装置及计算机存储介质 | |
| EP2409649A1 (en) | Ultrasonic diagnostic apparatus and method thereof | |
| JP2012110416A (ja) | 測定装置 | |
| JP7242623B2 (ja) | 超音波画像表示システム及びその制御プログラム | |
| US20200222030A1 (en) | Ultrasound image apparatus and method of controlling the same | |
| US20070016057A1 (en) | Medical device having gripping layer | |
| WO2022181517A1 (ja) | 医療画像処理装置、方法及びプログラム | |
| US20210236084A1 (en) | Ultrasound-based liver examination device, ultrasound apparatus, and ultrasound imaging method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080328 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100803 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20101102 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20101102 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101102 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20101109 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110203 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110301 |