JP2005287286A - ケンチング監視制御システム及びその動作方法 - Google Patents
ケンチング監視制御システム及びその動作方法 Download PDFInfo
- Publication number
- JP2005287286A JP2005287286A JP2005021072A JP2005021072A JP2005287286A JP 2005287286 A JP2005287286 A JP 2005287286A JP 2005021072 A JP2005021072 A JP 2005021072A JP 2005021072 A JP2005021072 A JP 2005021072A JP 2005287286 A JP2005287286 A JP 2005287286A
- Authority
- JP
- Japan
- Prior art keywords
- superconducting coil
- coil
- temperature
- superconducting
- temperature sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K55/00—Dynamo-electric machines having windings operating at cryogenic temperatures
- H02K55/02—Dynamo-electric machines having windings operating at cryogenic temperatures of the synchronous type
- H02K55/04—Dynamo-electric machines having windings operating at cryogenic temperatures of the synchronous type with rotating field windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/25—Devices for sensing temperature, or actuated thereby
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E40/00—Technologies for an efficient electrical power generation, transmission or distribution
- Y02E40/60—Superconducting electric elements or equipment; Power systems integrating superconducting elements or equipment
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Superconductive Dynamoelectric Machines (AREA)
Abstract
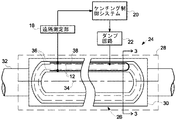
【解決手段】 回転機械(26)は、温度センサ(38)に通信可能に結合された制御システム(20)を具備していてもよい。制御システム(20)は、規定された超伝導コイルの温度を表す信号が温度センサ(38)から受信されたときに、超伝導コイルの電流を減少させるように動作可能であってもよい。
【選択図】 図2
Description
Claims (10)
- ロータ(26)の内部に配置された超伝導コイル(12)と;
超伝導コイル温度を表す信号を供給するように動作可能である温度センサ(38)とを具備する回転機械(10)。 - 前記温度センサ(38)に通信可能に結合された制御システム(20)を具備し、前記制御システム(20)は、規定された超伝導コイル温度を表す信号が前記温度センサ(38)から受信されたときに、前記超伝導コイル(12)の電流を減少させるように動作可能である請求項1記載の回転機械(10)。
- 前記超伝導コイル(12)の周囲に配置された熱伝導性シート(46)を具備し、前記温度センサ(38)は、前記熱伝導性シート(46)と前記超伝導コイル(12)との間に配置される請求項2記載の回転機械(10)。
- 前記制御システム(20)は、前記超伝導コイル(12)により発生される磁界によって前記温度センサ(38)で発生する磁気抵抗効果を補償するように動作可能である請求項2記載の回転機械(10)。
- 前記温度センサ(38)は、抵抗温度検出器である請求項1記載の回転機械(10)。
- 前記抵抗温度検出器(38)は、前記超伝導コイル(12)において臨界電流が最小であると予測される領域(50)に隣接して配置されたワイヤを具備する請求項5記載の回転機械(10)。
- 超伝導コイル(12)のケンチング監視制御システム(14)において、
超伝導コイル温度を表す信号を供給するように動作可能である温度センサ(38)と;
前記温度センサ(38)に結合され、規定された超伝導コイル温度を表す信号が前記温度センサ(38)から受信されたときに、前記超伝導コイル(12)の電流を減少させるように動作可能である制御システム(20)とを具備するケンチング監視制御システム(14)。 - 超伝導コイル(12)を有する回転機械(10)を動作する方法において、
前記超伝導コイル(12)に対する電流を制御するように動作可能である制御システム(20)に、超伝導コイル温度を表す信号を供給することと;
規定された超伝導コイル温度を表す信号が受信されたときに、前記超伝導コイル(12)に対する電流を減少させることとから成る方法。 - 前記超伝導コイル(12)に対する電流を減少させることは、前記超伝導コイル(12)により起こる、温度センサ(38)に対する磁気抵抗効果を補償することを含む請求項8記載の方法。
- 磁気抵抗効果を補償することは、超伝導コイル電流に基づいて、前記温度センサ(38)が受ける磁界強度を確定することと、前記磁界強度に基づいて、超伝導コイル温度を表す信号に対して修正を適用することとを含む請求項9記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/813,281 | 2004-03-30 | ||
| US10/813,281 US7053509B2 (en) | 2004-03-30 | 2004-03-30 | Quench monitoring and control system and method of operating same |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005287286A true JP2005287286A (ja) | 2005-10-13 |
| JP4733989B2 JP4733989B2 (ja) | 2011-07-27 |
Family
ID=34887704
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005021072A Expired - Fee Related JP4733989B2 (ja) | 2004-03-30 | 2005-01-28 | ケンチング監視制御システム及びその動作方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7053509B2 (ja) |
| EP (1) | EP1583211A3 (ja) |
| JP (1) | JP4733989B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008016554A (ja) * | 2006-07-04 | 2008-01-24 | Toshiba Corp | 高温超電導コイル装置 |
| JP2014504349A (ja) * | 2010-11-30 | 2014-02-20 | ジーイー エナジー パワー コンバージョン テクノロジー リミテッド | 極低温素子絶縁体 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7262679B2 (en) * | 2005-07-19 | 2007-08-28 | E.I. Du Pont De Nemours And Company | Rotary transformer |
| US7719400B1 (en) | 2005-08-02 | 2010-05-18 | Rtd Company | Method and apparatus for flexible temperature sensor having coiled element |
| US7630179B2 (en) * | 2005-09-22 | 2009-12-08 | Reliance Electric Technologies, Llc | Protective link for superconducting coil |
| US7633192B2 (en) * | 2006-09-28 | 2009-12-15 | Siemens Energy, Inc. | Superconducting coil support structures |
| US8251579B2 (en) * | 2007-07-16 | 2012-08-28 | Rtd Company | Robust stator winding temperature sensor |
| US7724483B2 (en) * | 2008-03-19 | 2010-05-25 | General Electric Company | Systems and methods involving protection of superconducting generators for power applications |
| DE102011077456A1 (de) * | 2011-06-14 | 2012-12-20 | Siemens Aktiengesellschaft | Synchronmaschine mit HTS-Läufer |
| JP5917195B2 (ja) * | 2012-02-29 | 2016-05-11 | 川崎重工業株式会社 | 超電導回転機の界磁回転子 |
| JP6243917B2 (ja) | 2012-10-16 | 2017-12-06 | メジャメント スペシャリティーズ, インコーポレイテッド | 補強された可撓性の温度センサ |
| FR3000321B1 (fr) * | 2012-12-20 | 2016-07-22 | European Aeronautic Defence & Space Co Eads France | Machine electrique a bobines supraconductrices |
| US9240681B2 (en) | 2012-12-27 | 2016-01-19 | General Electric Company | Superconducting coil system and methods of assembling the same |
| US9112444B2 (en) * | 2013-03-14 | 2015-08-18 | Remy Technologies, L.L.C. | Electric machine including a temperature sensing system |
| US11521771B2 (en) | 2019-04-03 | 2022-12-06 | General Electric Company | System for quench protection of superconducting machines, such as a superconducting wind turbine generator |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63190313A (ja) * | 1987-02-03 | 1988-08-05 | Japan Atom Energy Res Inst | 超電導磁石の常電導転移検出法 |
| DE4124433A1 (de) * | 1990-08-20 | 1992-04-30 | Siemens Ag | Schaltungsanordnung mit einem supraleiter |
| JP2003521206A (ja) * | 2000-01-11 | 2003-07-08 | アメリカン スーパーコンダクター コーポレイション | 超電導回転装置用励磁機および電子調整器 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5047741A (en) * | 1989-08-17 | 1991-09-10 | General Electric Company | Epoxy-impregnated superconductive tape coils |
| US5548168A (en) * | 1994-06-29 | 1996-08-20 | General Electric Company | Superconducting rotor for an electrical machine |
| WO2001058005A2 (en) * | 2000-01-11 | 2001-08-09 | American Superconductor Corporation | Exciter assembly telemetry |
| JP3717792B2 (ja) * | 2001-02-27 | 2005-11-16 | 住友重機械工業株式会社 | 冷凍機冷却型超電導マグネット装置 |
| US6642682B1 (en) * | 2002-02-21 | 2003-11-04 | Active Power Inc. | Circuits and methods for preheating a rotor of a motor-generator device |
-
2004
- 2004-03-30 US US10/813,281 patent/US7053509B2/en not_active Expired - Fee Related
-
2005
- 2005-01-26 EP EP05250407A patent/EP1583211A3/en not_active Withdrawn
- 2005-01-28 JP JP2005021072A patent/JP4733989B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63190313A (ja) * | 1987-02-03 | 1988-08-05 | Japan Atom Energy Res Inst | 超電導磁石の常電導転移検出法 |
| DE4124433A1 (de) * | 1990-08-20 | 1992-04-30 | Siemens Ag | Schaltungsanordnung mit einem supraleiter |
| JP2003521206A (ja) * | 2000-01-11 | 2003-07-08 | アメリカン スーパーコンダクター コーポレイション | 超電導回転装置用励磁機および電子調整器 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008016554A (ja) * | 2006-07-04 | 2008-01-24 | Toshiba Corp | 高温超電導コイル装置 |
| JP2014504349A (ja) * | 2010-11-30 | 2014-02-20 | ジーイー エナジー パワー コンバージョン テクノロジー リミテッド | 極低温素子絶縁体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4733989B2 (ja) | 2011-07-27 |
| US20050218731A1 (en) | 2005-10-06 |
| EP1583211A2 (en) | 2005-10-05 |
| US7053509B2 (en) | 2006-05-30 |
| EP1583211A3 (en) | 2009-09-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4733989B2 (ja) | ケンチング監視制御システム及びその動作方法 | |
| EP1612903B1 (en) | System and method for quench and over-current protection of superconductor | |
| JP4856393B2 (ja) | 超電導体のクエンチ保護のためのシステム及び方法 | |
| US9614472B2 (en) | System for monitoring temperature inside electric machines | |
| Mohammed et al. | Stator winding fault thermal signature monitoring and analysis by in situ FBG sensors | |
| EP0489291B1 (en) | Superconducting magnet system with inductive quench heaters | |
| CN100567920C (zh) | 估计定子内部温度的非介入的方法 | |
| WO2007046561A1 (en) | Controller and heating wire capable of preventing generation of electromagnetic waves | |
| US7630179B2 (en) | Protective link for superconducting coil | |
| JP5057965B2 (ja) | 超電導装置、この超電導装置を備えたエネルギ蓄積装置およびこの超電導装置を備えた磁場発生装置 | |
| KR101759269B1 (ko) | 고온초전도마그넷을 위한 지역절연권선 및 그 제조방법 | |
| GB2126028A (en) | Quench detector for superconducting winding | |
| JP3270105B2 (ja) | 固定子鉄心異常検出装置 | |
| JPH07128394A (ja) | 電気機器の絶縁劣化監視診断システム | |
| JP5121600B2 (ja) | 超電導コイル装置および超電導コイルの検査方法 | |
| JPS6350845B2 (ja) | ||
| JP2525066B2 (ja) | 超電導回転電機 | |
| Reyes et al. | Assessing hydrogen direct cooling electrical generators through on-line partial discharge measurements | |
| JPH0630299B2 (ja) | 超電導磁石装置 | |
| JP2018155424A (ja) | 誘導溶解炉の湯漏れ検出装置 | |
| JPS61230303A (ja) | 超電導電磁石の保護回路 | |
| JPS62107631A (ja) | 電気装置の温度検出装置 | |
| Johnson | Operational experience with IEEE# 117 motor test procedure | |
| JPS60131077A (ja) | インバ−タの過大電流検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100713 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20101012 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20101012 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101012 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20101015 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110112 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110329 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110425 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140428 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |