JP2005205184A - 診断支援装置 - Google Patents
診断支援装置 Download PDFInfo
- Publication number
- JP2005205184A JP2005205184A JP2004349139A JP2004349139A JP2005205184A JP 2005205184 A JP2005205184 A JP 2005205184A JP 2004349139 A JP2004349139 A JP 2004349139A JP 2004349139 A JP2004349139 A JP 2004349139A JP 2005205184 A JP2005205184 A JP 2005205184A
- Authority
- JP
- Japan
- Prior art keywords
- image
- optical system
- imaging
- endoscope
- shift
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00188—Optical arrangements with focusing or zooming features
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00149—Holding or positioning arrangements using articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/042—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by a proximal camera, e.g. a CCD camera
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/055—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances having rod-lens arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/064—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2476—Non-optical details, e.g. housings, mountings, supports
- G02B23/2484—Arrangements in relation to a camera or imaging device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2072—Reference field transducer attached to an instrument or patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/365—Correlation of different images or relation of image positions in respect to the body augmented reality, i.e. correlating a live optical image with another image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3954—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3983—Reference marker arrangements for use with image guided surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/02—Devices for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computerised tomographs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
Abstract
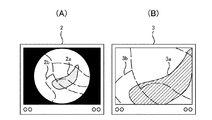
【解決手段】 内視鏡装置10を架台保持装置50によって患者付近に固定し、内視鏡装置10の硬性内視鏡10a内の対物光学系を含む第1撮影光学系により形成される広角像と対応する透過画像とを重畳して第1モニター2に表示すると同時に、第2撮影光学系により形成される拡大像と対応する透過画像と重畳して第2モニター3に表示する。第2撮影光学系に含まれるペシャンプリズム24を光軸に対して垂直な面内でシフトさせることにより、拡大像の撮影範囲を移動させることができ、これに応じて透過画像の表示範囲をシフトさせることにより、ずれのない重畳表示が可能である。
【選択図】 図1
Description
内視鏡装置の座標系:(XE, YE, ZE)
なお、内視鏡ローカル座標原点67は、硬性鏡10aの瞳位置である。また、軸XE, YEは、それぞれ軸XS, YSと平行である。
位置測定装置の座標系:(XG, YG, ZG)
透視画像基準マーカーの座標系:(XM, YM, ZM)
透視画像撮影時には、患者の体表面に透視画像基準マーカー90を固定し、断層診断装置100により患者と透視画像基準マーカー90を同時に撮影し、透視画像内の透視画像基準マーカーを基準に内視鏡画像と合成する。
断層診断装置の座標系:(XCT, YCT, ZCT)
r = √(XE 2 + YE 2),
r = ZE・tanω
XE = r・cosθ
YE = r・sinθ
R’ = R + ξ3・R3 + ξ5・R5 + ξ7・R7 + …
但し、R = f・tanω = f・r/Z、
f は硬性鏡の焦点距離、Zは物体距離、
DIST = ξ3・R2 + ξ5R4 + ξ7・R6 + …である。
XE’ = R’・cosθ
YE’ = R’・sinθ
T = m1・XE’
U = m1・YE’
となる。
XE″ = XE´ - ΔXS × 2
YE″ = YE´ - ΔYS × 2
V = m2・XE″
W = m2・YE″
となる。
内視鏡装置10ローカル座標系:(XE, YE, ZE)
視野シフト機構部の座標系:(XS, YS)
位置測定装置の座標系(グローバル座標系):(XG, YG, ZG)
透視画像基準マーカーの座標系:(XM, YM, ZM)
断層診断装置の座標系:(XCT, YCT, ZCT)
内視鏡装置10のローカル円筒座標系:(r, θ, ZE)
内視鏡装置10の1次結像面のローカル円筒座標系:(R’, θ)
内視鏡装置10の1次結像面のローカル直交座標系:(XE’, YE’)
内視鏡装置10の第1の撮像素子上の座標系:(T, U)
内視鏡装置10の第2の撮像素子上の座標系:(V, W)
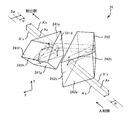
10 内視鏡装置
10a 硬性鏡
11 対物レンズ群
12 リレーレンズ
23 第1再結像レンズ
24 ペシャンプリズム
25 フォーカスレンズ
26 第2再結像レンズ
27 移動機構
27a XYステージ
27b シフト量測定装器
29 位置検出器
30,40 CCDカメラ
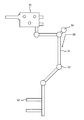
50 内視鏡保持装置
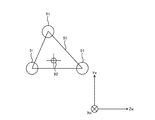
66 内視鏡マーカー
67 内視鏡ローカル座標原点
70 位置測定装置
80 画像合成装置
80a CPU
80b RAM
80g ROM
90 透視画像基準位置マーカー
100 断層診断装置
Claims (5)
- 被検体の内部構造を光学系を介して撮像素子上に結像させて撮影する内視鏡装置と、
該内視鏡装置を前記被検体に対して固定可能に保持する保持装置と、
前記内視鏡装置により撮影された前記被検体の所定部位の内視鏡画像に、断層診断装置により得られた断層画像に基づいて生成された前記所定部位の透視画像を重畳する画像合成手段と、
該画像合成手段により合成された画像を表示する表示手段と、
前記内視鏡装置の光学系による結像位置と前記撮像素子の位置とを前記光学系の光軸に対して垂直な面内で相対的にシフトさせる第1のシフト手段と、
該第1のシフト手段によるシフトに伴う前記内視鏡画像の撮影範囲の変化に対応させて前記透視画像の表示範囲をシフトさせる第2のシフト手段とを備え、
前記第1のシフト手段によるシフト後の内視鏡画像と前記第2のシフト手段によるシフト後の透視画像とを前記画像合成手段により合成して前記表示手段に表示させることを特徴とする診断支援装置。 - 前記断層診断装置は、CT装置、またはMRI装置であることを特徴とする請求項1に記載の診断支援装置。
- 前記第1のシフト手段は、前記内視鏡装置の光学系に含まれるペシャンプリズムと、該ペシャンプリズムを光軸に垂直な面内で二次元的に移動させるプリズム移動機構とを備えることを特徴とする請求項1または2に記載の診断支援装置。
- 前記内視鏡装置は、被検体の像を形成する対物光学系と、該対物光学系により形成される被検体の像の所定範囲を再結像させる第1再結像光学系と、該第1再結像光学系により形成される像を撮影する第1撮像素子と、前記対物光学系により形成される像の前記所定範囲の一部を拡大して再結像させる第2再結像光学系と、該第2再結像光学系により形成される像を撮影する第2撮像素子とを備え、
前記画像合成手段は、前記第1撮像素子により撮影された第1の内視鏡画像とこれに対応する範囲の前記透視画像とを合成して第1の合成画像を生成すると共に、前記第2撮像素子により撮影された第2の内視鏡画像とこれに対応する範囲の前記透視画像とを合成して第2の合成画像を生成し、
前記第1のシフト手段は、前記第2撮影光学系による結像位置と前記第2撮像素子の位置とを相対的にシフトさせ、
前記第2のシフト手段は、前記第2の合成画像を構成する透視画像の表示範囲をシフトさせ、
前記表示手段は、前記第1の合成画像を表示する第1の表示装置と、前記第2の合成画像を表示する第2の表示装置とを含むことを特徴とする請求項1〜3のいずれかに記載の診断支援装置。 - 内視鏡設置時に内視鏡装置の基準位置を第1の座標値、透視画像の基準位置を第2の座標値として測定する位置測定装置と、
第1撮影光学系と、
前記第1撮影光学系を介して所定範囲の視野の像を撮像して第1画像信号を出力する第1撮像デバイスと、
少なくとも一枚のレンズを含み、前記所定範囲の視野中の少なくとも一部の像を形成する第2撮影光学系と、
前記第2撮影光学系を介して、前記像を撮像して第2画像信号を出力する第2撮像デバイスと、
前記第2撮影光学系中のレンズの光軸と前記第2撮像デバイスとを相対的にシフトさせることによって、前記第2撮影光学系を介して前記第2撮像デバイスによる撮像範囲を、前記所定範囲の視野内で移動させるシフト装置と、
前記シフト装置によってシフトされた前記レンズの光軸と前記第2撮像デバイスとのシフト量を第3の座標値として出力する内視鏡装置と、
前記第1の座標値と前記第2の座標値に基づいて第1画像信号に透視画像を合成し、前記第1の座標値と前記第2の座標値と第3の座標値に基づいて第2画像信号に透視画像を合成する画像合成装置と、
当該画像合成装置から出力された前記第1の画像信号を表示する第1の表示装置と、
第2の画像信号を表示する、第2の表示装置を備えることを特徴とする診断支援装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004349139A JP2005205184A (ja) | 2003-12-22 | 2004-12-01 | 診断支援装置 |
| US11/016,913 US20050148854A1 (en) | 2003-12-22 | 2004-12-21 | Diagnosis supporting device |
| DE102004061875A DE102004061875A1 (de) | 2003-12-22 | 2004-12-22 | Einrichtung zur Diagnoseunterstützung |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003424646 | 2003-12-22 | ||
| JP2004349139A JP2005205184A (ja) | 2003-12-22 | 2004-12-01 | 診断支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005205184A true JP2005205184A (ja) | 2005-08-04 |
| JP2005205184A5 JP2005205184A5 (ja) | 2008-12-25 |
Family
ID=34703306
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004349139A Withdrawn JP2005205184A (ja) | 2003-12-22 | 2004-12-01 | 診断支援装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20050148854A1 (ja) |
| JP (1) | JP2005205184A (ja) |
| DE (1) | DE102004061875A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017074178A (ja) * | 2015-10-14 | 2017-04-20 | 株式会社 オルタステクノロジー | 撮像装置及びそれを用いた内視鏡装置 |
| JP2020151404A (ja) * | 2019-03-22 | 2020-09-24 | ソニー・オリンパスメディカルソリューションズ株式会社 | 医療用画像処理装置、医療用観察装置、医療用観察システム、医療用画像処理装置の作動方法および医療用画像処理プログラム |
| JP2021509031A (ja) * | 2017-12-28 | 2021-03-18 | エシコン エルエルシーEthicon LLC | 手術室内の装置を判定するための外科用ハブ空間認識 |
Families Citing this family (62)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100580184B1 (ko) * | 2004-01-15 | 2006-05-16 | 삼성전자주식회사 | 1회 스캐닝에 의한 복수 이미지 파일들의 생성방법 및 장치 |
| WO2007041383A2 (en) * | 2005-09-30 | 2007-04-12 | Purdue Research Foundation | Endoscopic imaging device |
| ES2569411T3 (es) | 2006-05-19 | 2016-05-10 | The Queen's Medical Center | Sistema de seguimiento de movimiento para imágenes adaptativas en tiempo real y espectroscopia |
| JP4891006B2 (ja) * | 2006-09-06 | 2012-03-07 | オリンパス株式会社 | 内視鏡装置 |
| US8081353B2 (en) * | 2007-12-12 | 2011-12-20 | Lexmark International, Inc. | Enhanced illuminated scanning unit reference marker |
| US20090287109A1 (en) * | 2008-05-14 | 2009-11-19 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Circulatory monitoring systems and methods |
| US9672471B2 (en) | 2007-12-18 | 2017-06-06 | Gearbox Llc | Systems, devices, and methods for detecting occlusions in a biological subject including spectral learning |
| US9717896B2 (en) | 2007-12-18 | 2017-08-01 | Gearbox, Llc | Treatment indications informed by a priori implant information |
| US9202387B2 (en) * | 2009-11-11 | 2015-12-01 | Stryker Leibinger Gmbh & Co. Kg | Methods for planning and performing percutaneous needle procedures |
| DE102010029275A1 (de) * | 2010-05-25 | 2011-12-01 | Siemens Aktiengesellschaft | Verfahren zum Bewegen eines Instrumentenarms eines Laparoskopierobotors in einer vorgebbare Relativlage zu einem Trokar |
| DE102011076811A1 (de) * | 2011-05-31 | 2012-12-06 | Siemens Aktiengesellschaft | Verfahren zum Abbilden des Inneren eines Körpers |
| US9606209B2 (en) | 2011-08-26 | 2017-03-28 | Kineticor, Inc. | Methods, systems, and devices for intra-scan motion correction |
| KR101294649B1 (ko) * | 2012-04-30 | 2013-08-16 | 경북대학교 산학협력단 | 수술영상의 정합에 대한 검증방법 및 보상방법 |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| US11517189B2 (en) * | 2012-06-28 | 2022-12-06 | Lavie Golenberg | Portable endoscope with interference free transmission |
| US20150297062A1 (en) * | 2012-06-28 | 2015-10-22 | GOLENBERG Lavie | Integrated endoscope |
| US9717461B2 (en) | 2013-01-24 | 2017-08-01 | Kineticor, Inc. | Systems, devices, and methods for tracking and compensating for patient motion during a medical imaging scan |
| US10327708B2 (en) | 2013-01-24 | 2019-06-25 | Kineticor, Inc. | Systems, devices, and methods for tracking and compensating for patient motion during a medical imaging scan |
| US9305365B2 (en) | 2013-01-24 | 2016-04-05 | Kineticor, Inc. | Systems, devices, and methods for tracking moving targets |
| CN105392423B (zh) | 2013-02-01 | 2018-08-17 | 凯内蒂科尔股份有限公司 | 生物医学成像中的实时适应性运动补偿的运动追踪系统 |
| CN106572810A (zh) | 2014-03-24 | 2017-04-19 | 凯内蒂科尔股份有限公司 | 去除医学成像扫描的预期运动校正的系统、方法和装置 |
| CN106714681A (zh) | 2014-07-23 | 2017-05-24 | 凯内蒂科尔股份有限公司 | 用于在医学成像扫描期间追踪和补偿患者运动的系统、设备和方法 |
| US9943247B2 (en) | 2015-07-28 | 2018-04-17 | The University Of Hawai'i | Systems, devices, and methods for detecting false movements for motion correction during a medical imaging scan |
| CN107529976B (zh) * | 2015-09-18 | 2019-10-29 | 奥林巴斯株式会社 | 第一信号处理装置和内窥镜系统 |
| US10716515B2 (en) | 2015-11-23 | 2020-07-21 | Kineticor, Inc. | Systems, devices, and methods for tracking and compensating for patient motion during a medical imaging scan |
| CN111163678B (zh) * | 2017-09-18 | 2023-10-24 | 派瑞威克技术私人有限公司 | 有助于体腔检查和诊断的数字设备 |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US11759224B2 (en) | 2017-10-30 | 2023-09-19 | Cilag Gmbh International | Surgical instrument systems comprising handle arrangements |
| US11666331B2 (en) | 2017-12-28 | 2023-06-06 | Cilag Gmbh International | Systems for detecting proximity of surgical end effector to cancerous tissue |
| US20190201039A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Situational awareness of electrosurgical systems |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11202570B2 (en) | 2017-12-28 | 2021-12-21 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US20190201146A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Safety systems for smart powered surgical stapling |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US11903601B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Surgical instrument comprising a plurality of drive systems |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11612444B2 (en) | 2017-12-28 | 2023-03-28 | Cilag Gmbh International | Adjustment of a surgical device function based on situational awareness |
| US11786245B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Surgical systems with prioritized data transmission capabilities |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US20190201139A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Communication arrangements for robot-assisted surgical platforms |
| US11659023B2 (en) | 2017-12-28 | 2023-05-23 | Cilag Gmbh International | Method of hub communication |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US10892995B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11672605B2 (en) | 2017-12-28 | 2023-06-13 | Cilag Gmbh International | Sterile field interactive control displays |
| US11678881B2 (en) | 2017-12-28 | 2023-06-20 | Cilag Gmbh International | Spatial awareness of surgical hubs in operating rooms |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US11937769B2 (en) | 2017-12-28 | 2024-03-26 | Cilag Gmbh International | Method of hub communication, processing, storage and display |
| US11633237B2 (en) | 2017-12-28 | 2023-04-25 | Cilag Gmbh International | Usage and technique analysis of surgeon / staff performance against a baseline to optimize device utilization and performance for both current and future procedures |
| US11259830B2 (en) | 2018-03-08 | 2022-03-01 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| US11464532B2 (en) | 2018-03-08 | 2022-10-11 | Cilag Gmbh International | Methods for estimating and controlling state of ultrasonic end effector |
| US11589915B2 (en) | 2018-03-08 | 2023-02-28 | Cilag Gmbh International | In-the-jaw classifier based on a model |
| US11259806B2 (en) | 2018-03-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling devices with features for blocking advancement of a camming assembly of an incompatible cartridge installed therein |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| US11331100B2 (en) | 2019-02-19 | 2022-05-17 | Cilag Gmbh International | Staple cartridge retainer system with authentication keys |
| US11751872B2 (en) | 2019-02-19 | 2023-09-12 | Cilag Gmbh International | Insertable deactivator element for surgical stapler lockouts |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002224138A (ja) * | 2001-02-02 | 2002-08-13 | Olympus Optical Co Ltd | 手術ナビゲーション装置 |
| JP2002245442A (ja) * | 2000-11-14 | 2002-08-30 | Asahi Optical Co Ltd | 像サーチ装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5776050A (en) * | 1995-07-24 | 1998-07-07 | Medical Media Systems | Anatomical visualization system |
| JP4042170B2 (ja) * | 1996-11-13 | 2008-02-06 | 株式会社ニコン | 防振望遠鏡 |
| US7037258B2 (en) * | 1999-09-24 | 2006-05-02 | Karl Storz Imaging, Inc. | Image orientation for endoscopic video displays |
| JP4674948B2 (ja) * | 2000-09-29 | 2011-04-20 | オリンパス株式会社 | 手術ナビゲーション装置および手術ナビゲーション装置の作動方法 |
| US6930705B2 (en) * | 2000-11-14 | 2005-08-16 | Pentax Corporation | Image search device |
| US6717752B2 (en) * | 2000-11-14 | 2004-04-06 | Pentax Corporation | Image search device |
-
2004
- 2004-12-01 JP JP2004349139A patent/JP2005205184A/ja not_active Withdrawn
- 2004-12-21 US US11/016,913 patent/US20050148854A1/en not_active Abandoned
- 2004-12-22 DE DE102004061875A patent/DE102004061875A1/de not_active Withdrawn
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002245442A (ja) * | 2000-11-14 | 2002-08-30 | Asahi Optical Co Ltd | 像サーチ装置 |
| JP2002224138A (ja) * | 2001-02-02 | 2002-08-13 | Olympus Optical Co Ltd | 手術ナビゲーション装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017074178A (ja) * | 2015-10-14 | 2017-04-20 | 株式会社 オルタステクノロジー | 撮像装置及びそれを用いた内視鏡装置 |
| JP2021509031A (ja) * | 2017-12-28 | 2021-03-18 | エシコン エルエルシーEthicon LLC | 手術室内の装置を判定するための外科用ハブ空間認識 |
| JP2020151404A (ja) * | 2019-03-22 | 2020-09-24 | ソニー・オリンパスメディカルソリューションズ株式会社 | 医療用画像処理装置、医療用観察装置、医療用観察システム、医療用画像処理装置の作動方法および医療用画像処理プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102004061875A1 (de) | 2005-07-21 |
| US20050148854A1 (en) | 2005-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005205184A (ja) | 診断支援装置 | |
| CN110638527B (zh) | 基于光学相干层析增强现实的手术显微成像系统 | |
| US6930705B2 (en) | Image search device | |
| JPH11508780A (ja) | 視覚情報を並行検出する方法及びそのための装置並びに前記方法の使用方法 | |
| JPH05215971A (ja) | 計算器に支援された定位形けんび外科用の手術けんび鏡ならびにその操作法 | |
| JP5561458B2 (ja) | 手術支援システム | |
| US11698535B2 (en) | Systems and methods for superimposing virtual image on real-time image | |
| JP2006320427A (ja) | 内視鏡手術支援システム | |
| JP4253493B2 (ja) | 光学観察装置及びこれに用いる立体画像入力光学系 | |
| JP2004320722A (ja) | 立体観察システム | |
| JP4728039B2 (ja) | 医療用観察装置 | |
| JP5274100B2 (ja) | 医療用観察装置 | |
| US20220400938A1 (en) | Medical observation system, control device, and control method | |
| JP4759277B2 (ja) | 観察方法および観察補助具 | |
| JP4716747B2 (ja) | 医療用立体画像観察装置 | |
| JP2017176773A (ja) | 手術支援システム、手術支援方法、手術支援プログラム | |
| JP4187830B2 (ja) | 医用画像合成装置 | |
| JP4436495B2 (ja) | 手術用観察システム | |
| US20040165258A1 (en) | Stereoscopic microscope, and an observation mechanism for use in a stereoscopic microscope | |
| JP4472080B2 (ja) | 顕微鏡下手術支援システム | |
| JP2002245442A (ja) | 像サーチ装置 | |
| JP2023064077A (ja) | 内視鏡カメラ装置およびカメラ位置合わせエラーの補正のための方法 | |
| US20230026585A1 (en) | Method and system for determining a pose of at least one object in an operating theatre | |
| JP2005118107A (ja) | 画像表示システム | |
| JP2021159734A (ja) | ナビゲーションオートフォーカスシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071023 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20080501 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100520 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100525 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20100701 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20101104 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101104 |
|
| A072 | Dismissal of procedure [no reply to invitation to correct request for examination] |
Free format text: JAPANESE INTERMEDIATE CODE: A072 Effective date: 20101116 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110517 |