JP2005145256A - 車体運動実現方法及び装置 - Google Patents
車体運動実現方法及び装置 Download PDFInfo
- Publication number
- JP2005145256A JP2005145256A JP2003385963A JP2003385963A JP2005145256A JP 2005145256 A JP2005145256 A JP 2005145256A JP 2003385963 A JP2003385963 A JP 2003385963A JP 2003385963 A JP2003385963 A JP 2003385963A JP 2005145256 A JP2005145256 A JP 2005145256A
- Authority
- JP
- Japan
- Prior art keywords
- friction coefficient
- wheel
- longitudinal
- vehicle body
- utilization factor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Abstract
【課題】 操舵制御をせずに所定の車体運動を実現する。
【解決手段】 各種センサにより検出された各種の車体の状態量を取り込み(50)、各車輪について諸物理量を求め(52〜66)。演算等して得られた物理量を用いて、評価関数を定義し(68)、評価関数を用いて、各輪の前後方向μ利用率を演算する(70)。各輪の前後方向μ利用率、路面μ、及び接地荷重を用いて、各輪の制駆動力Fxを演算し(72)、各輪の制駆動力Fxに基づいて各輪を制駆動制御する(74)。
【選択図】 図5
【解決手段】 各種センサにより検出された各種の車体の状態量を取り込み(50)、各車輪について諸物理量を求め(52〜66)。演算等して得られた物理量を用いて、評価関数を定義し(68)、評価関数を用いて、各輪の前後方向μ利用率を演算する(70)。各輪の前後方向μ利用率、路面μ、及び接地荷重を用いて、各輪の制駆動力Fxを演算し(72)、各輪の制駆動力Fxに基づいて各輪を制駆動制御する(74)。
【選択図】 図5
Description
本発明は、車体運動実現方法及び装置にかかり、特に、車両が所定の車体運動を実現する車体運動実現方法及び装置に関する。
特許文献1では、所望の車体合力方向とヨーモーメントを実現するなかで、車体合力を最大化する4輪独立操舵、独立制駆動制御を提示している。ここでは、各輪のタイヤと路面との間の路面摩擦係数μの利用率(以下、μ利用率という)は、一定としてタイヤ発生力方向を操作量と考えてμ利用率を最小とする最適な制御則を導出している。
また、特許文献2では、目標となるヨーモーメント、車両前後力、及び横力、各輪のスリップ率微小変化に対するヨーモーメント、車両前後力、及び横力の変化に基づいて目標となるヨーモーメントと車両前後力、横力を得るための各輪のスリップ率目標値を演算し、この目標値に基づく制動力制御を提案している。
特願2003-024177号明細書
特開平11-348753号公報
しかし、上記特許文献1に記載の装置では。タイヤ発生力方向を自由に操作させる必要があり、操舵制御が不可欠な構成となっている。なお、上記特許文献2における手法では各輪のスリップ率を求める制動力配分ロジックにおいて4行4列の逆行列を用いた最急降下法の演算を行っており、演算負荷が大きい。
本発明は、上記事実に鑑み成されたもので、操舵制御をせずに所定の車体運動を実現することの可能な車体運動実現方法及び装置を提供することを目的とする。
上記目的を達成するために請求項1に記載の発明は、所定の車体運動を得るための所望のヨーモーメント及び前後力を実現するように、各輪毎に、タイヤと路面との間の前後方向の摩擦係数の利用率である前後方向摩擦係数利用率を最小化し、該最小化された前後方向摩擦係数利用率に基づいて、該車体運動を実現するものである。
即ち、本発明では、各輪毎に、所定の車体運動を得るための所望のヨーモーメント及び前後力を実現するように、前後方向摩擦係数利用率を最小化する。そして、最小化された各輪毎の前後方向摩擦係数利用率に基づいて、各輪の制駆動力を制御する。これにより、所定の車体運動が実現される。
このように、本発明は、各輪毎に前後方向摩擦係数利用率を最小化することにより、車体運動を実現するので、操舵制御をせずに所定の車体運動を実現することができる。
この場合、所望のヨーモーメントの拘束条件を線形化して、前後摩擦係数利用率を最小化するようにしてもよい。このように、所望のヨーモーメントの拘束条件を線形化する、即ち、近似的に線形化すると、計算負荷を減らすことができる。
具体的には、例えば、前記ヨーモーメントを、タイヤと路面との間の横方向の摩擦係数の利用率である横摩擦係数利用率と、前記前後摩擦係数利用率と、を用いて定義し、前記横摩擦係数利用率を、前記前後摩擦係数利用率で展開することにより、前記所望のヨーモーメントの拘束条件を線形化する。
そして、車輪が前後合わせて4輪備えられている場合には、上記線形化された所望のヨーモーメント及び前後力の2つの拘束条件により2行4列の行列の擬似逆行列を作成して、前後摩擦係数利用率を最小化するようにするようにしてもよい。これは、擬似逆行列の演算が拘束条件を満たしかつユークリッドノルムを最小化する解を導出するという性質を利用したものである。
ところで、各輪ごとに最小化された前後摩擦係数利用率が所定の限界値を超える場合もある。そこで、各輪ごとに最小化された前後摩擦係数利用率が所定の限界値を超えたか否かを判断し、該最小化された前後摩擦係数利用率が所定の限界値を超えたと判断された場合には、該最小化された前後摩擦係数利用率を修正、例えば、所定の限界値以下、例えば、所定の限界値に修正するようにしてもよい。
この場合、更に、前記最小化された前後摩擦係数利用率が所定の限界値を超えたと判断された車輪以外の車輪についての、前記最小化された前後摩擦係数利用率を、前記最小化された前後摩擦係数利用率が所定の限界値を超えたと判断された当該車輪の前後摩擦係数利用率が前記修正さらた値になるように修正する。
そして、更に、上記最小化された前後摩擦係数利用率が所定の限界値を超えたと判断されない車輪の数が拘束条件の数以下の場合には、所望のヨーモーメント及び前後力の少なくとも一方を修正するようにしてもよい。
請求項9に記載の発明の車体運動実現装置は、車両の状態量を検出する検出手段と、前記検出手段により検出された車両の状態量に基づいて、所定の車体運動を得るための所望のヨーモーメント及び前後力を実現するように、各輪毎に、タイヤと路面との間の前後方向の摩擦係数の利用率である前後方向摩擦係数利用率を最小化する最小化手段と、前記最小化手段により最小化された各輪毎の前後方向摩擦係数利用率に基づいて、各輪の制駆動力を制御する制御手段と、を備えている。本発明の車体運動実現装置は、上記と同様の作用・効果を奏するので、その説明を省略する。
なお、本本発明の車体運動実現装置の最小化手段は、上記と同様に、次のようにすることができる。即ち、所望のヨーモーメント及び前後力を拘束条件として、前後摩擦係数利用率を最小化する。この場合、前記所望のヨーモーメントの拘束条件を線形化して、前後摩擦係数利用率を最小化する。また、前記ヨーモーメントを、タイヤと路面との間の横方向の摩擦係数の利用率である横摩擦係数利用率と、前記前後摩擦係数利用率と、を用いて定義し、前記横摩擦係数利用率を、前記前記前後摩擦係数利用率で展開することにより、前記所望のヨーモーメントの拘束条件を線形化する。そして、前記車輪が前後合わせて4輪備えられた場合には、前記線形化された前記所望のヨーモーメントと前記前後力の2つの拘束条件により作成された2行4列の行列の擬似逆行列を用いて、前後摩擦係数利用率を最小化する。
また本発明の車体運動実現装置の最小化手段は、前記各輪ごとに最小化された前後摩擦係数利用率が所定の限界値を超えたか否かを判断し、前記最小化された前後摩擦係数利用率が所定の限界値を超えたと判断された場合には、前記最小化された前後摩擦係数利用率を(例えば、前記所定の限界値以下に)修正する。なお、更に、前記最小化された前後摩擦係数利用率が所定の限界値を超えたと判断された車輪以外の車輪についての、前記最小化された前後摩擦係数利用率を、前記最小化された前後摩擦係数利用率が所定の限界値を超えたと判断された車輪の前後摩擦係数利用率が前記修正さらた値になるように修正するようにしてもよい。そして、前記最小化された前後摩擦係数利用率が所定の限界値を超えたと判断されない車輪の数が拘束条件の数以下の場合には、所望のヨーモーメント及び前後力の少なくとも一方を修正する。
以上説明したように本発明によれば、所望のヨーモーメント及び前後力を満たしかつ各輪毎に前後方向摩擦係数利用率を最小化することにより、車体運動を実現するので、操舵制御をせずに所定の車体運動を実現することができる、という効果がある。
以下、図面を参照して本発明の実施の形態の一例を詳細に説明する。
最初に、本実施の形態における各輪毎に前後方向摩擦係数利用率を最小化する原理を説明する。
4輪の制駆動力を操作量とする制駆動VDMでは、操舵角の制御は行われないため、タイヤ発生力ベクトルは、限界摩擦円全体を利用することはできない。操作量である4輪の制駆動力を変化させると、タイヤ発生力ベクトルは、図1のようにドライバの操舵角や車両運動によって決まるスリップ角一定の摩擦楕円上を移動する。このため、ここではまず、ブラッシュモデルを用いて摩擦楕円に対応するタイヤ前後力、横力、スリップ角の関係を整理する。
まず、ブラッシュモデルによるタイヤ前後力、横力の記述を簡単化するためにタイヤの前後スリップ、横スリップ、合成スリップを以下のように定義する。
まず、ブラッシュモデルによるタイヤ前後力、横力の記述を簡単化するためにタイヤの前後スリップ、横スリップ、合成スリップを以下のように定義する。

ただし、κx:前後スリップ、κy:横スリップ、κ:合成スリップ、vx:タイヤ位置前後方向速度、Vy:タイヤ位置横方向速度、Vw:タイヤ回転速度、Ks:タイヤ前後方向スティッフネス、Kβ:タイヤ横方向スティッフネスである。また、タイヤ発生力の方向θは、スリップの方向に一致する、
すなわち、
すなわち、
と仮定するとタイヤ前後力Fx、横力Fyは、以下のように記述される。
(グリップ領域)
(グリップ領域)
(全すべり領域)
ただし、μ:路面μ、Fz:接地荷重である。
ここで、(5)、(6)式より、
となることより、グリップ余裕度ε
とξsには、
という関係があることがわかる。また、
と(11)式より、
さらに、(4)式の関係を考慮すると、
が得られる。
各輪荷重と路面μが既知であるとすると、現在の各輪の前後力(エンジン出力、ブレーキ圧から推定)、横力(横加速度、ヨー角加速度から推定)からグリップ余裕度を導出することができ、(15)から横スリップを求めることができる。
ここでは、(14)、(15)式をさらに路面μ、荷重、前後方向スティッフネスを用いて規格化したスリップを規格化前後スリップ、規格化横スリップとして次式のように定義する。
また、前後力、横力に関しても規格化し、前後μ利用率(-1≦γx≦1)、横μ
利用率(-1≦γy≦1)として次式のように定義する。
利用率(-1≦γy≦1)として次式のように定義する。
このとき、ξsは
となることから、規格化前後スリップ、規格化横スリップを用いて前後μ利用率、横μ利用率を記述すると、
(グリップ領域)
(グリップ領域)
(全すべり領域)
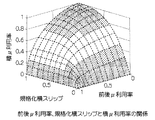
と整理できる。これらの(20)-(24)式に基づいて、規格化横スリップと前後μ利用率から横μ利用率を求めることが可能である。すなわち、規格化横スリップと前後μ利用率が与えられたときには、(20)、(21)、(23)式に基づき規格化前後スリップを導出することが可能であり、こうして導出された規格化前後スリップを(20)、(22)、(24)式に代入することによって、横μ利用率が導出できる。
図2は、(20)-(24)式に基づき数値的に演算された前後μ利用率、規格化横スリップと横μ利用率の関係を示したものである。規格化横スリップ=1の状態は、摩擦円を示しており、規格化横スリップが大きくなるのにしたがって摩擦楕円が摩擦円に近づく特性を表現している。
上記で導出された摩擦楕円、すなわち前後μ利用率、規格化横スリップ、及び横μ利用率の関係に基づいて、制駆動制御の最適化を図る。ここでは、各輪の前後μ利用率を操作量として、操舵されて要求される所定の車体運動を得るための所望のヨーモーメントと前後力を得るという拘束条件の下で、操作量の大きさを最小化(ユークリッドノルム最小)を目的とした制御を導出する。
まず、所望のヨーモーメントをMz0とすると、ヨーモーメントに関する拘束条件は、
また、所望の前後力をFx0とすると、前後力に関する拘束条件は、
と記述できる。ここで、Tf:前輪トレッド、Tr:後輪トレッド、Lf:前軸−重心間距離、Lr:後軸−重心間距離、Fzi(i=1:左前輪、2:右前輪、3:左後輪、4:右後輪):各輪の接地荷重、γX:各輪の前後μ利用率、γX:各輪の横μ利用率、μ:路面μである。
したがって、制駆動制御の最適化問題は、(25)、(26)式の拘束条件を満足し、かつ
という評価関数を最小化するγXiを求める問題として定式化される。よって、(25)式及び(26)式の拘束条件を満足しつつ(27)式の評価関数を最小化するγXiを求めればよい。
ところで、(25)式において横μ利用率は、図2に示されるように前後μ利用率と規格化横スリップの関数として表現されるものであり、このうち規格化横スリップは、現在の車両運動(車体スリップ角、ヨー角速度、車速)や操舵角で決定される変数である。このため、最適化に際しては、規格化横スリップは定数とみなし、横μ利用率を前後μ利用率でテーラー展開することによって拘束条件を近似的に線形化することが可能である。γXi0の周りで(25)式をテーラー展開すると、
すなわち、
と記述できることから、結局、(27)式を最小化するγXiは、γXi0を前ステップで導出されたγXiとした次式の漸化式によって求めることができる。
ただし、
であり、+は擬似逆行列を意味している。
上記(29)式の漸化式を繰り返し解くことにより、各輪の前後方向μ利用率を得ることができる。
次に、本実施の形態の具体的構成を説明する。
図4は、本実施の形態の車体運動実現方法を実現する車体運動実現装置が示されている。10FL及び10FRはそれぞれ車輌12の左右の前輪を示し、10RL及び10RRはそれぞれ車輌の駆動輪である左右の後輪を示している。従動輪であり操舵輪でもある左右の前輪10FL及び10FRは運転者によるステアリングホイール14の転舵に応答して駆動されるラック・アンド・ピニオン式のパワーステアリング装置16によりタイロッド18L 及び18R を介して操舵される。
各車輪の制動力は制動装置20の油圧回路22によりホイールシリンダ24FR、24FL、24RR、24RLの制動圧が制御されることによって制御されるようになっている。図には示されていないが、油圧回路22はリザーバ、オイルポンプ、種々の弁装置等を含み、各ホイールシリンダの制動圧は通常時には運転者によるブレーキペダル26の踏み込み操作に応じて駆動されるマスタシリンダ28により制御され、また必要に応じて後に詳細に説明する如く電気式制御装置30により制御される。
車輪10FR〜10RLにはそれぞれ車輪速度Vwi(i=fr、fl、rr、rl)を検出する車輪速度センサ32FR、32FL、32RR、32RLが設けられ、ステアリングホイール14が連結されたステアリングコラムには操舵角φを検出する操舵角センサ34が設けられている。また車輌12にはそれぞれ車輌のヨーレートrを検出するヨーレートセンサ36、前後加速度Gx を検出する前後加速度センサ38、横加速度Gy を検出する横加速度センサ40、車速Vを検出する車速センサ42が設けられている。尚操舵角センサ34、ヨーレートセンサ36及び横加速度センサ40は車輌の左旋回方向を正としてそれぞれ操舵角、ヨーレート及び横加速度を検出する。
図示の如く、車輪速度センサ32FR〜32RLにより検出された車輪速度Vwiを示す信号、操舵角センサ34により検出された操舵角φを示す信号、ヨーレートセンサ36により検出されたヨーレートrを示す信号、前後加速度センサ38により検出された前後加速度Gx を示す信号、横加速度センサ40により検出された横加速度Gy を示す信号、車速センサ42により検出された車速Vを示す信号は電気式制御装置30に入力される。尚図には詳細に示されていないが、電気式制御装置30は例えばCPUとROMとRAMと入出力ポート装置とを有し、これらが双方向性のコモンバスにより互いに接続された一般的な構成のマイクロコンピュータを含んでいる。なお、ROMには、図2に示す、前後μ利用率、規格化横スリップ、及び横μ利用率の関係、及び、図3に示す、規格化横スリップ、前後μ利用率、及び横μ利用率勾配の関係を3次元マップとして記憶している。更に、ROMには、車体運動実現方法を実現するための車体運動実現プログラムが記憶されている。
次に、本実施の形態の作用を、図5に示す車体運動実現プログラムのフローチャートを参照して説明する。
ステップ50で、上記各種センサにより検出された各種の車体の状態量を取り込み、ステップ52で、路面摩擦係数μを推定する。
ステップ54で、各輪を識別する変数iを初期化し、ステップ56で、変数iを1インクリメントし、以下、ステップ64まで、変数iにより識別される車輪について次の諸物理量を求める。即ち、ステップ58で、前後方向加速度を考慮して接地荷重Fziを演算する。ステップ60で、規格化横スリップを演算する。即ち、当該車輪の前後力をエンジン出力、ブレーキ圧から推定し、横力を横加速度、ヨー角加速度から推定し、このように推定した前後力及び横力から、グリップ余裕度を求める。そして、前後力、横力、及びグリップ余裕度から、規格化横スリップを演算する。ステップ62で、図2に示す3次元マップから、
を取り込み、
ステップ64で、図3に示す3次元マップから、
ステップ64で、図3に示す3次元マップから、
を取り込む。
ステップ66で、変数iが車輪の総数i0(本実施の形態では4)に等しいか否かを判断する。変数iが車輪の総数i0に等しくないと判断された場合には、上記諸物理量が演算されていない車輪があるので、ステップ56に戻り、以上の処理(ステップ56〜66)を実行する。
一方、変数iが車輪の総数i0に等しいと判断された場合には、上記諸物理量が演算されていない車輪がないので、ステップ68に進む。
ステップ68で、上記演算等して得られた物理量を用いて、(29)式に示す関数を定義する。ステップ70で、この関数を用いて、各輪の前後方向μ利用率を演算する。
ステップ72で、各輪の前後方向μ利用率、路面μ、及び接地荷重を用いて、各輪の制駆動力Fxを演算し、ステップ74で、各輪の制駆動力Fxに基づいて各輪を制駆動制御する。具体的には、制動制御の際には、上記のように、各輪の制駆動力Fxが得られるように、油圧回路22から各ホイールシリンダ24FR〜24RLへの制動圧を制御する。
以上説明したように、本実施の形態では、各輪の操舵角は制御せず、各輪毎に前後μ利用率を最小化し、前後μ利用率から制駆動制御することにより、操舵などより要求される車体運動を実現するので、操舵制御をせずに所定の車体運動を実現することができる。
また、本実施の形態では、所望のヨーモーメント及び前後力を拘束条件として、前後μ利用率を最小化しているので、所望のヨーモーメント及び前後力を実現でき、所定の車体運動を精度よく得ることができる。
更に、本実施の形態では、所望のヨーモーメントの拘束条件を線形化して、前後μ利用率を最小化しているので、計算負荷を減らすことができる。
以上説明した実施の形態では、(29)式に示す関数の単純な繰り返し演算によって、各輪の前後方向μ利用率を演算しているが、本発明はこれに限定されるものではなく、ペナルテイ関数を更に用いるようにしてもよい。
即ち、最大化すべき評価関数J(γx)と拘束条件の偏差に関する評価を併せたペナルティ関数
を定義する。ただし、JFx(γx)は、(26)式の拘束条件に関する評価、すなわち
また、JMZ(γx)は、(25)式の拘束条件に関する評価、すなわち
である。ここで、(30)式の解γxと前ステップの探索点γx0に関するペナルティ関数を演算し、P(γx)<P(γx0)であれば、γx0=γxとして(30)式の漸化式を再び演算する。また、P(γx)>P(γx0)であれば、
を次の探索点候補と考え、γに関するペナルティ関数を演算する。
ここで、
であれば、
として
(30)式の漸化式を再び演算する。
(30)式の漸化式を再び演算する。
また、
であれば
を満たすまで
を繰り返し、常にペナルティ関数を減少させるステップを進め、漸化式の収束を図る。
ところで、上記実施の形態では、各輪ごとに最小化された前後方向μ利用率が所定の限界値を超える場合もあるので、前後方向μ利用率を所定の限界値以下、例えば、所定の限界値に修正するようにしてもよい。
即ち、限界値として、例えば、0.95を定め、(29)、(30)式の漸化式による演算結果が、
となった場合には、μ利用率を
と修正する。ここで、kは、修正後のμ利用率絶対値の最大値を0.95とするゲインであり、次ステップの漸化式は、μ利用率の絶対値が0.95となる車輪以外に関してのみ求めるように修正する。例えば、第2輪(右前輪)が(34)式を満たす場合には、
ただし、
となる。
また、さらにもう一輪が限界を超え(34)式を満たした場合、例えば第4輪が(34)式を満たした場合には、
ただし、
として求めることができる。また、(38)、(39)式によって演算された結果が限界を超えた場合、あるいは(29)、(30)、(36)、(37)などの演算で、3輪以上が限界を超えた場合には、要求される車体前後力あるいはヨーモーメントが大きすぎることを意味しており、以下のロジックに基づいて、例えば2%減少させるなどの車体前後力とヨーモーメント要求値の修正を行う。
また、次ステップでは、修正後の車体前後力とヨーモーメント要求値に基づき、4輪の前後μ利用率を演算する(29)、(30)式の漸化式を解く。このとき、限界を超える車輪が存在すれば、(36)、(37)式などの前後μ利用率の制約条件や(40)、(41)式の車体前後力要求値の修正を繰り返す。
ここでは、限界を超える車体前後力あるいはヨーモーメントが要求された場合に両者を均等に修正する例を説明したが、状況に応じては、どちらか片方のみ修正することも考えられる。なお、車体発生力とヨーモーメントの間には、
という関係が存在する。ただし、l:重心と各輪位置の平均的な距離、F:車体発生力、m:車体質量、g:重力加速度である。この関係を利用することによって、現時点の車体横力Fyと要求される車体前後力、ヨーモーメントと路面μの関係が、
となる場合には、あらかじめ車体前後力あるいはヨーモーメントのどちらを優先するかを判断して、初期値の車体前後力あるいはヨーモーメント要求値をあらかじめ修正することによって最適化ロジック適用時の前後力修正を小さくすることができ、演算の収束速度の向上などが期待できる。
図6は、全ての車輪の規格化横スリップが0.5のときの計算例を示したものである。(a)は、ロジックがμ利用率の制約を受けない場合の例として、駆動力要求を13000N、ヨーモーメント要求を1000N、また、(b)は、ロジックがμ利用率の制約を受ける場合の例として、駆動力要求を16500N、ヨーモーメント要求を1000Nとしたときの各輪の前後μ利用率とタイヤ発生力ベクトル、車体合力ベクトルを示したものである。何れも適切に目標となるヨーモーメントと駆動力を実現するための各輪の前後μ利用率が演算できていることがわかる。
また、ここでは、最小化する評価関数として(27)式を設定しているが、本発明はこれに限られるものではなく、例えば
と設定し、前後輪の前後μ利用率に重み付けすることもできる。この場合、(29)式に相当する漸化式は、
と変更される。このように前後輪の前後μ利用率に関する重みを変更することによって、例えば
と設定する場合、前輪に比較して後輪のμ利用率を小さくすることが可能となり、車両運動の安定性向上が期待できる。
10FR〜10RL 車輪
20 制動装置
28 マスタシリンダ
30 電気式制御装置
32FR〜32RL 車輪速度センサ
34 操舵角センサ
36 ヨーレートセンサ
38 前後加速度センサ
40 横加速度センサ
42 車速センサ
20 制動装置
28 マスタシリンダ
30 電気式制御装置
32FR〜32RL 車輪速度センサ
34 操舵角センサ
36 ヨーレートセンサ
38 前後加速度センサ
40 横加速度センサ
42 車速センサ
Claims (9)
- 所定の車体運動を得るための所望のヨーモーメント及び前後力を実現するように、各輪毎に、タイヤと路面との間の前後方向の摩擦係数の利用率である前後方向摩擦係数利用率を最小化し、該最小化された前後方向摩擦係数利用率に基づいて、該車体運動を実現する車体運動実現方法。
- 前記所望のヨーモーメント及び前後力を拘束条件として、前後摩擦係数利用率を最小化することを特徴とする請求項1記載の車体運動実現方法。
- 前記所望のヨーモーメントの拘束条件を線形化して、前後摩擦係数利用率を最小化することを特徴とする請求項2に記載の車体運動実現方法。
- 前記ヨーモーメントを、タイヤと路面との間の横方向の摩擦係数の利用率である横摩擦係数利用率と、前記前後摩擦係数利用率と、を用いて定義し、
前記横摩擦係数利用率を、前記前記前後摩擦係数利用率で展開することにより、前記所望のヨーモーメントの拘束条件を線形化する、
ことを特徴とする請求項3に記載の車体運動実現方法。 - 前記車輪が前後合わせて4輪備えられ、
前記線形化された前記所望のヨーモーメントと前記前後力の2つの拘束条件により作成された2行4列の行列の擬似逆行列を用いて、前後摩擦係数利用率を最小化する、
ことを特徴とする請求項2乃至請求項4の何れか1項に記載の車体運動実現方法。 - 前記各輪ごとに最小化された前後摩擦係数利用率が所定の限界値を超えたか否かを判断し、
前記最小化された前後摩擦係数利用率が所定の限界値を超えたと判断された場合には、前記最小化された前後摩擦係数利用率を修正する、
ことを特徴とする請求項1乃至請求項5の何れか1項に記載の車体運動実現方法。 - 前記最小化された前後摩擦係数利用率が所定の限界値を超えたと判断された車輪以外の車輪についての、前記最小化された前後摩擦係数利用率を、前記最小化された前後摩擦係数利用率が所定の限界値を超えたと判断された車輪の前後摩擦係数利用率が前記修正された値になるように修正する請求項6に記載の車体運動実現方法。
- 前記最小化された前後摩擦係数利用率が所定の限界値を超えたと判断されない車輪の数が拘束条件の数以下の場合には、所望のヨーモーメント及び前後力の少なくとも一方を修正することを特徴とする請求項6又は請求項7に記載の車体運動実現方法。
- 車両の状態量を検出する検出手段と、
前記検出手段により検出された車両の状態量に基づいて、所定の車体運動を得るための所望のヨーモーメント及び前後力を実現するように、各輪毎に、タイヤと路面との間の前後方向の摩擦係数の利用率である前後方向摩擦係数利用率を最小化する最小化手段と、
前記最小化手段により最小化された各輪毎の前後方向摩擦係数利用率に基づいて、各輪の制駆動力を制御する制御手段と、
を備えた車体運動実現装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003385963A JP2005145256A (ja) | 2003-11-14 | 2003-11-14 | 車体運動実現方法及び装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003385963A JP2005145256A (ja) | 2003-11-14 | 2003-11-14 | 車体運動実現方法及び装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005145256A true JP2005145256A (ja) | 2005-06-09 |
Family
ID=34693794
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003385963A Pending JP2005145256A (ja) | 2003-11-14 | 2003-11-14 | 車体運動実現方法及び装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005145256A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007114299A1 (ja) * | 2006-03-31 | 2007-10-11 | Kabushiki Kaisha Toyota Chuo Kenkyusho | 車両運動制御装置及び制御方法 |
| JP2008143212A (ja) * | 2006-12-06 | 2008-06-26 | Toyota Central R&D Labs Inc | 車両運動制御装置及び制御方法 |
| JP2008247066A (ja) * | 2007-03-29 | 2008-10-16 | Mazda Motor Corp | 車両の運動制御装置 |
| JP2008247067A (ja) * | 2007-03-29 | 2008-10-16 | Mazda Motor Corp | 車両の運動制御装置 |
| JP2009202780A (ja) * | 2008-02-28 | 2009-09-10 | Advics Co Ltd | 制動力配分制御装置 |
| US8050822B2 (en) | 2005-12-27 | 2011-11-01 | Honda Motor Co., Ltd. | Controller of vehicle |
| US8155852B2 (en) | 2005-12-27 | 2012-04-10 | Honda Motor Co., Ltd. | Vehicle control device |
-
2003
- 2003-11-14 JP JP2003385963A patent/JP2005145256A/ja active Pending
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8050822B2 (en) | 2005-12-27 | 2011-11-01 | Honda Motor Co., Ltd. | Controller of vehicle |
| US8155852B2 (en) | 2005-12-27 | 2012-04-10 | Honda Motor Co., Ltd. | Vehicle control device |
| WO2007114299A1 (ja) * | 2006-03-31 | 2007-10-11 | Kabushiki Kaisha Toyota Chuo Kenkyusho | 車両運動制御装置及び制御方法 |
| JP2007269294A (ja) * | 2006-03-31 | 2007-10-18 | Toyota Central Res & Dev Lab Inc | 車両運動制御装置及び制御方法 |
| US8301353B2 (en) | 2006-03-31 | 2012-10-30 | Kabushiki Kaisha Toyota Chuo Kenkyusho | Vehicle motion control device and control method |
| JP2008143212A (ja) * | 2006-12-06 | 2008-06-26 | Toyota Central R&D Labs Inc | 車両運動制御装置及び制御方法 |
| JP2008247066A (ja) * | 2007-03-29 | 2008-10-16 | Mazda Motor Corp | 車両の運動制御装置 |
| JP2008247067A (ja) * | 2007-03-29 | 2008-10-16 | Mazda Motor Corp | 車両の運動制御装置 |
| JP2009202780A (ja) * | 2008-02-28 | 2009-09-10 | Advics Co Ltd | 制動力配分制御装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4143104B2 (ja) | 車両の制御装置 | |
| JP3458734B2 (ja) | 車輌の運動制御装置 | |
| Li et al. | Comprehensive tire–road friction coefficient estimation based on signal fusion method under complex maneuvering operations | |
| US11292308B2 (en) | Vehicle motion state estimation apparatus | |
| CN110116732B (zh) | 一种考虑轮胎侧偏刚度变化的车辆侧向稳定控制方法 | |
| JP4268019B2 (ja) | 車体運動実現方法及び装置 | |
| US6795761B1 (en) | Overall control algorithm for interactive vehicle control system | |
| CN101657345A (zh) | 用于估计车轮的接地面摩擦状态的装置和方法 | |
| EP2001720A1 (en) | Vehicle dynamics control system and method of controlling vehicle dynamics | |
| JP3621842B2 (ja) | 車輌の運動制御装置 | |
| WO2020003550A1 (ja) | ステアリング制御装置及びステアリング装置 | |
| CN110239499B (zh) | 车辆的控制装置及车辆的控制方法 | |
| US20220024464A1 (en) | Vehicle control apparatus | |
| Bowman et al. | A feasibility study of an automotive slip control braking system | |
| JP2005145256A (ja) | 車体運動実現方法及び装置 | |
| JP2010195089A (ja) | 車両用操舵制御装置および車両用操舵制御方法 | |
| JP2000190832A (ja) | 車輌の運動制御装置 | |
| JP2010260544A (ja) | 加加速度情報を用いた車両の運動制御方法 | |
| JP2009502621A (ja) | 車両の操舵方向の制御方法 | |
| JP2004025996A (ja) | 車輌の運動制御装置 | |
| WO2020003549A1 (ja) | ステアリング制御装置及びステアリング装置 | |
| JP3827265B2 (ja) | 車輌の制動制御装置 | |
| JP3653182B2 (ja) | 車輌の運動制御装置 | |
| JP3447969B2 (ja) | 車輌の運動制御装置 | |
| JP3729661B2 (ja) | 車輌の運動制御装置 |