JP2004264149A - スロットル開度検知装置 - Google Patents
スロットル開度検知装置 Download PDFInfo
- Publication number
- JP2004264149A JP2004264149A JP2003054782A JP2003054782A JP2004264149A JP 2004264149 A JP2004264149 A JP 2004264149A JP 2003054782 A JP2003054782 A JP 2003054782A JP 2003054782 A JP2003054782 A JP 2003054782A JP 2004264149 A JP2004264149 A JP 2004264149A
- Authority
- JP
- Japan
- Prior art keywords
- magneto
- throttle opening
- signal processing
- impedance
- processing circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Combined Controls Of Internal Combustion Engines (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【解決手段】回転するスロットル開度検出用磁石1による磁場を検出する磁気センサ2が、異なった方向に配設された2つのマグネト・インピーダンス素子21、22によって構成されるとともに、信号処理回路23が、前記2つのマグネト・インピーダンス素子21、22からの出力を切換手段Sによって交互に切り替えて信号処理する1個の信号処理回路から成るマグネト・インピーダンス磁気検出器20を備え、前記演算回路3が、前記信号処理回路23から交互に出力される出力の比に基づきスロットル開度を検知するもので、前記スロットル開度検出用磁石1の回転角度θを算出するスロットル開度検知装置。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、回転するスロットル開度検出用磁石による磁場を検出する磁気センサと、検知された磁場の変化を信号処理する信号処理回路および該信号処理回路から出力された出力信号に基づきスロットル開度を演算する演算回路を備えたスロットル開度検知装置に関する。
【0002】
【従来の技術】
従来の磁気方式によるスロットル角度センサは、磁石と磁電変換素子を相対的に回転可能に配置し、この回転磁場のベクトル成分を磁場内に存在する前記磁電変換素子であるホール素子や磁気抵抗素子によって検出するものであった。
【0003】
上記従来のスロットル角度センサは、磁石による磁場内に配置したホール素子のような磁電変換素子によって、その感度軸方向成分の信号の大きさを求めて回転角を出力するものであるので、回転機構などのクリアランス変化により機械的にガタが生じると磁石と磁電変換素子との距離が変化するため磁電変換素子に印加される磁場の強さが変化し、検出した角度出力信号に誤差が生じるという問題があった。
【0004】
そこで、従来の第1のスロットル角度センサは、磁界の方向に応じて検出信号を発生するホール素子と磁石との距離変化があっても磁電変換素子が受ける磁界の強度が変化しないように、磁石を特殊形状にするとともに、該磁石を保持する機構部品に工夫を加え、磁気回路上および機構上の工夫を加えるものであった(例えば特許文献1参照)。
【0005】
また従来の第2のスロットル角度センサは、磁界の方向に対応した電気信号を出力する磁電変換素子としてのホール素子と磁石との相対位置が変化しても磁束が均一化され誤差が低減されるように、磁石に凹状の溝を設けて、磁気回路上の工夫を加えるものであった(例えば特許文献2参照)。
【0006】
さらに従来の第3のスロットル角度センサは、磁界の方向に応じて検出信号を発生する磁電変換素子としてのホール素子に力が加えられても磁石とホール素子との間隔が変わらないように、ホール素子の位置決め部を有する複雑な機構部品である固定部材を用意するもので、機構上の工夫を加えるものであった(例えば特許文献3参照)。
【0007】
【特許文献1】
特開平6−42907号号公報(第3−4頁、第1図〜第3図)
特開平10−132506号公報(第3−4頁、第1図)
特開平10−62113号公報(第2−5頁、第1図、第2図)
【0008】
【発明が解決しようとする課題】
上記従来のスロットル角度センサは、いずれもホール素子が検出する磁力から磁場と素子との傾き角を検出するものであるが、この計測を安定化するため、磁気回路上または機構上の工夫を加えるものであるため、構造が繊細且つ複雑になるので、大型化し、コスト高かつ高精度な組付け作業が必要になるという問題があった。
【0009】
また上記従来のスロットル角度センサは、温度変化により磁石が発する磁場の強さが変化したり、また磁電変換素子の感度が変化することにより、誤差が混入するという問題があった。
【0010】
さらに近年における装置および機器、とりわけ自動車分野において、高精度化の強い要請があり、スロットル角度センサについても高精度化とともに小型、軽量化さらには省エネルギー化のニーズが高まっている。
【0011】
そこで本発明者は、回転するスロットル開度検出用磁石による磁場を検出する磁気センサと、検知された磁場の変化を信号処理する信号処理回路および該信号処理回路から出力された出力信号に基づきスロットル開度を演算する演算回路を備えたスロットル開度検知装置において、異なった方向に配設された前記磁気センサを構成する2つのマグネト・インピーダンス素子からの出力を、前記信号処理回路を構成する1個の信号処理回路において、切換手段によって交互に切り替えて得られた信号を処理するとともに、前記演算回路において、前記2つのマグネト・インピーダンス素子によって検知され前記信号処理回路から交互に出力される前記2つのマグネト・インピーダンス素子の出力の比に基づきスロットル開度を検知するという本発明の技術的思想に着眼し、更に研究開発を重ねた結果、磁石と磁電変換素子との距離の変化に伴う誤差の発生を防止するための磁気回路上および機構上の工夫を不要にし、磁場強さの変化や磁電変換素子の感度変化の影響を受けない安定度が高く、かつ小型、低消費電力、耐高温度の角度センサを提案するという目的を達成する本発明に到達した。
【0012】
【課題を解決するための手段】
本発明(請求項1に記載の第1発明)のスロットル開度検知装置は、
回転するスロットル開度検出用磁石による磁場を検出する磁気センサと、検知された磁場の変化を信号処理する信号処理回路および該信号処理回路から出力された出力信号に基づきスロットル開度を演算する演算回路を備えたスロットル開度検知装置において、
前記磁気センサが、異なった方向に配設された2つのマグネト・インピーダンス素子によって構成されるとともに、
前記信号処理回路が、前記2つのマグネト・インピーダンス素子からの出力を切換手段によって交互に切り替えて信号処理する1 個の信号処理回路から成るマグネト・インピーダンス磁気検出器を備え、
前記演算回路が、前記2つのマグネト・インピーダンス素子によって検知され、前記信号処理回路から交互に出力される前記2つのマグネト・インピーダンス素子の出力の比に基づきスロットル開度を検知する
ものである。
【0013】
本発明(請求項2に記載の第2発明)のスロットル開度検知装置は、
前記第1発明において、
前記2つのマグネト・インピーダンス素子が、直交関係に配置され、
前記演算回路が,一方のマグネト・インピーダンス素子の出力Hxと他方のマグネト・インピーダンスセンサ素子の出力Hyから,前記スロットル開度検出用磁石の回転角度θを,前記数1の関係によって算出するものである。
【0014】
本発明(請求項3に記載の第3発明)のスロットル開度検知装置は、
前記第2発明において、
前記2つのマグネト・インピーダンス素子が、アモルファスワイヤと該アモルファスワイヤの回りに巻装された検知コイルとから成り、
前記1 個の信号処理回路が、前記2つのマグネト・インピーダンス素子を交互に切換えてパルス通電するパルスジェネレータと、これに同期して得られる2つの磁気信号を交互に所定の時間保持することにより時系列で出力するサンプルホールド回路からなる1組の電子回路である
ものである。
【0015】
本発明(請求項4に記載の第4発明)のスロットル開度検知装置は、
前記第3発明において、
前記検知コイルと前記1組の電子回路とが、同一の基板上に形成されているものである。
【0016】
【発明の作用および効果】
上記構成より成る第1発明のスロットル開度検知装置は、回転するスロットル開度検出用磁石による磁場を検出する磁気センサと、検知された磁場の変化を信号処理する信号処理回路および該信号処理回路から出力された出力信号に基づきスロットル開度を演算する演算回路を備えたスロットル開度検知装置において、異なった方向に配設された前記磁気センサを構成する2つのマグネト・インピーダンス素子からの出力を、前記信号処理回路を構成する1 個の信号処理回路において、切換手段によって交互に切り替えて得られた信号を処理するとともに、前記演算回路において、前記2つのマグネト・インピーダンス素子によって検知され、前記信号処理回路から交互に出力される前記2つのマグネト・インピーダンス素子の出力の比に基づきスロットル開度を検知するので、一方のマグネト・インピーダンス素子が動作している時には他方のマグネト・インピーダンス素子が動作していないため、互いに他方のマグネト・インピーダンス素子の動作による電磁的影響を受けないため、高精度のスロットル開度検知を可能にするとともに、磁石と磁電変換素子との距離の変化に伴う誤差の発生を防止するための磁気回路上および機構上の工夫を不要にし、磁場強さの変化や磁電変換素子の感度変化の影響を受けない安定度が高くかつ小型化するという効果を奏する。
【0017】
上記構成より成る第2発明のスロットル開度検知装置は、前記第1発明において、前記信号処理回路が,直交関係に配置された一方のマグネト・インピーダンス素子の出力Hxと他方のマグネト・インピーダンスセンサ素子の出力Hyから,前記スロットル開度検出用磁石の回転角度θを,前記数1の関係によって算出するものであるので、磁石と磁電変換素子との距離の変化に伴う誤差の発生を防止するための磁気回路上および機構上の工夫を不要にし、磁場強さの変化や磁電変換素子の感度変化の影響を受けない安定度が高くかつ小型化するという効果を奏する。
【0018】
上記構成より成る第3発明のスロットル開度検知装置は、前記第2発明において、前記2つのマグネト・インピーダンス素子が、アモルファスワイヤにパルス電流が印加されたときの周囲磁場を該アモルファスワイヤの回りに巻装された検知コイルによって電圧が誘起され、前記1個の信号処理回路としての電子回路が、前記2つのマグネト・インピーダンス素子を交互に切換えてパルス通電するパルスジェネレータのパルス通電に同期して前記サンプルホールド回路が得られる2つの磁気信号を交互に所定の時間保持することにより時系列で出力するので、一方のマグネト・インピーダンス素子がパルス通電され動作している時には他方のマグネト・インピーダンス素子はパルス通電されていないため動作していないことから、互いに他方のマグネト・インピーダンス素子のパルス通電に伴う動作による電磁的影響を受けないため、高精度のスロットル開度検知を可能にするとともに、電子回路における同時信号処理をすることはないため、消費電力の低減を可能にし、処理回路をシンプルにするという効果を奏する。
【0019】
上記構成より成る第4発明のスロットル開度検知装置は、前記第3発明において、前記2つのマグネト・インピーダンス素子と前記1組の電子回路とが、同一の基板上に形成されているので、2つのセンサの特性を揃えることが出来るため、精度の高い測定を可能にするとともに、センサを小さくし、高感度化を可能にし、処理回路もシンプルにし、全体として小型化して、重量および消費電力を低減するという効果を奏する。
【0020】
【発明の実施の形態】
以下本発明の実施の形態につき、図面を用いて説明する。
【0021】
(第1実施形態)
本第1実施形態のスロットル開度検知装置は、図1および図2に示されるように回転するスロットル開度検出用磁石1による磁場を検出する磁気センサ2と、検知された磁場の変化を信号処理する信号処理回路23および該信号処理回路から出力された出力信号に基づきスロットル開度を演算する演算回路3を備えたスロットル開度検知装置において、前記磁気センサ2が、異なった方向に配設された2つのマグネト・インピーダンス素子21、22によって構成されるとともに、前記信号処理回路23が、前記2つのマグネト・インピーダンス素子21、22からの出力を切換手段によって交互に切り替えて信号処理する1 個の信号処理回路から成るマグネト・インピーダンス磁気検出器20を備え、前記演算回路3が、前記2つのマグネト・インピーダンス素子21、22によって検知され、前記信号処理回路23から交互に出力される前記2つのマグネト・インピーダンス素子21、22の出力の比に基づきスロットル開度を検知するもので、一方のマグネト・インピーダンス素子21の出力Hxと他方のマグネト・インピーダンスセンサ素子22の出力Hyから,前記スロットル開度検出用磁石1の回転角度θを,前記数1の関係によって算出するものである。
【0022】
本第1実施形態のスロットル開度検知装置の基本的構成は、図1に示されるように回転軸10に取り付けた磁石1と、この磁石の磁場を検出する磁電変換素子として互いになす角度が所定の角度に設定された2つのマグネト・インピーダンス素子21、22と、この2つの磁気信号を交互に切換えて出力する1つの信号処理回路23からなるマグネト・インピーダンス磁気検出器2と、前記2つの磁気信号の比に基づいて回転角度を算出する演算回路としての角度算出装置3からなる。
【0023】
本第1実施形態における磁気センサは、互いの軸が所定の角度を持って設定された2つのマグネト・インピーダンス素子21、22であり, 回転する前記磁石1の磁場の各軸方向成分を検出してこの2つの磁気信号の比を角度算出装置3によって演算し、回転角度を出力するものである。
【0024】
図2は、前記磁石1による強さBの磁場内に2つのマグネト・インピーダンス素子21、22が配設され、その感度軸x,yが所定の角度αに設定されていることを表す平面図である。
【0025】
ここで一方のマグネト・インピーダンス素子21のx軸を基準として磁場となす角θを回転角とする。図2は磁場Bの回転角がθとなった状態を表している。このときもう1つのマグネト・インピーダンス素子22のy軸と磁場のなす角はα−θである。したがって2つの磁電変換素子21、22が検出する磁場の強さHx、Hyは、数2および数3となる。
【数2】
上記Hx,Hyは、いずれも回転角θの関数でありいずれも角度情報を持つので、HxあるいはHyのいずれかの信号を検出して角度信号とすることは可能であり、従来の装置においてもこの原理を利用したものが多い。
しかしながら数2および数3の両式とも磁場の強さBが係数として存在しているためこのBの値が変化するとHx,Hyが変化して誤差を生じる。
【0027】
たとえば磁石1を取り付けている回転軸10にガタが生じて磁電変換素子との相対距離が変化したり、不安定になると距離の逆数に比例して磁場強さが変化するので出力が変動し誤差の原因となる。また一般的に磁石の磁場強さには温度係数があるため温度変化によっても磁場の強さBが変化し誤差を生じる。
【0028】
そこで本第1実施形態における角度算出装置3は、2つのマグネト・インピーダンス素子21、22の出力の比を演算し、それにもとづいて角度を求める。すなわち2つのマグネト・インピーダンス素子21、22の出力の比Hy/ Hx
は数4のごとくになり、Hy/ Hxの分子および分母の前記磁場強さBの項が消去されるので前述の距離変化あるいは温度変化などによる磁場強さの変動の影響をなくすことができる。さらに前記Hy/Hxはマグネト・インピーダンス素子21、22の出力であるから、たとえば温度変化によって2つのマグネト・インピーダンス素子21、22に感度変化があっても互いの温度係数が同じであればこれも消去されるので高精度な計測が可能である。
【数4】
【0029】
つぎにαを90度に設定すると、上記数4は cos(90−θ)/ cosθ=tan θであるから、前記数1のごとくarctan(Hy/Hx)の演算をすることによりHy/Hxにもとづいてθを直線的に求めることができる。
【0030】
したがって2つのマグネト・インピーダンス素子21、22で検出したx、y各軸方向の磁気信号から演算によって直線関係がよくさらに安定で高精度な角度計測を可能にすることができる。
【0031】
次に前記磁電変換素子としてのマグネト・インピーダンス磁気検出器20は、アモルファスワイヤからなるため120℃の高温動作が可能であり、また2つのマグネト− インピーダンス素子の信号を交互に切換えて時系列で信号処理をするため、電子回路を1つ用意すればよく、さらなる低コスト化の効果を奏する。
【0032】
また前記角度算出装置3は、前記信号処理回路23の出力信号Hy、Hxからarctan(Hy/Hx)の演算を行い角度信号を出力する。
【0033】
さらに以上述べたごとく本第1実施形態におけるスロットル開度検知装置は、従来のように磁電変換素子に印加する磁場が変化しないように磁気センサと磁石との距離の安定化を図る機構部品を設けたり、磁場強さあるいはセンサ感度の安定化をはかるための電磁的な補償などの対策を施す必要がなくなるので、小型で安価な角度センサを実現できるものである。
【0034】
(第2実施形態)
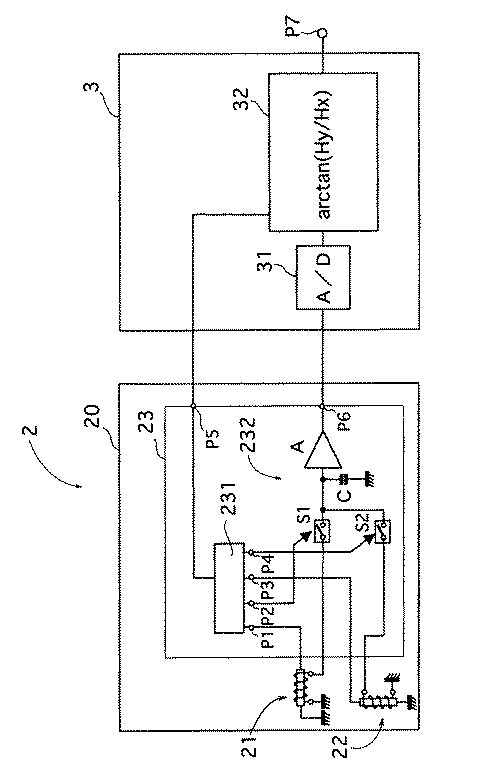
本第2実施形態のスロットル開度検知装置は、前記図1の構成に対応しており、詳細は図3に示される。回転軸10に取り付けられた磁石1は、前記図1と同じであるため図示を省略する。
【0035】
マグネト・インピーダンス磁気検出器20は、2つのマグネト・インピーダンス素子と1つの共通の信号処理回路からなる。x軸およびy軸の2つのマグネト・インピーダンス素子21,22は、互いに角度αが90度で各軸方向成分の信号を検出するべく前記回転磁場内に配設されている。
【0036】
マグネト・インピーダンス素子21,22は、アモルファスワイヤに検出コイルが巻回されてなるものでこのアモルファスワイヤにパルス電流を通電すると周囲の磁場の軸方向成分に対応する電圧が検出コイルに瞬間的に誘起される。この検出コイルに誘起された電圧を信号処理することで磁場信号を得ることができる。
【0037】
信号処理回路23は、前記2つのマグネト・インピーダンス素子21、22の信号を処理するためのもので、パルスジェネレータ231とサンプルホールド回路232からなる。
【0038】
パルスジェネレータ231は、繰返し周波数が2MHzでパルス幅が数十ns(ナノ秒)でかつ所定の位相差で同期する2つのパルス列を発生し、端子P1、P2の組とP3、P4の組からそれぞれ5μs(マイクロ秒)の周期で切換えて交互に出力する。また、出力端子P5は、このパルス列を5μsごとに交互に切換えるときの同期信号が出力されるが、これは後段の角度算出装置3に出力される。
【0039】
前記パルスジェネレータ231の出力端子P1 およびP3は、x軸、y軸2つのマグネト・インピーダンス素子21,22のアモルファスワイヤに接続されているので、5μsごとに交互に2MHzのパルス列の電流が印加される。パルスが印加されるとマグネト・インピーダンス素子21および22の各検出コイルには周囲の磁場に対応する電圧が瞬間的に誘起される。
【0040】
アナログスイッチS1、S2の制御端子に前記パルスジェネレータ231の出力端子P2、P4のパルスが印加されるが、前記のごとく端子P1とP2のパルスおよびP3とP4のパルスはそれぞれ同期しているので、パルスが印加されるとごく短期間スイッチが” 閉” になり前記マグネト・インピーダンス素子21,22の検出コイルに瞬間的に誘起した磁場に対応する電圧がコンデンサCにホールドされる。
【0041】
前述のごとくマグネト・インピーダンス素子21、22に印加されるパルス列は、2MHzであるので、磁場の計測は2MHzの繰り返し頻度で間欠的に実行されるが、アナログスイッチS1 、S2とコンデンサCおよび増幅器Aがサンプルホールド回路232を形成しているので、この出力端子P6の信号はほぼ連続的な波形である。
【0042】
しかしながら前述のようにパルスジェネレータ231は、5μsの周期でパルス列をP1,P2の組とP3,P4の組と交互に出力するので、このマグネト・インピーダンス磁気検出器2の出力端子P6の信号は前記マグネト・インピーダンス素子21および22が検出した磁気信号すなわち前記xおよびy方向成分の磁場信号を時系列的に交互に出力する。
【0043】
図4におけるaは前記図1における磁石1が一定の回転角速度で回転するときのx、y各軸のマグネト・インピーダンス素子に印加される磁場を表す。したがって横軸は時間でありかつ角度である。bはこのときのマグネト・インピーダンス磁気検出器2の出力端子P6の信号波形を表す。同図bにおいて、X、Yの記号は前記のごとくx、y各軸に対応するマグネト・インピーダンス素子21および22の出力が5μs の周期で交互に切換えられているところを表している。このbは理解の便のためにx, yの切換えの時間幅を角度変化する早さに対して誇張して広く描いているが、実際には機械的な角度変化に対して十分短かな時間であるため実用上角度情報が途切れるようなことにはならない。
【0044】
前記角度演算装置3は、主としてA/Dコンバータ31とマイクロコンピュータ32からなり前記回転磁場のx方向とy方向成分の比にもとづいてソフトウエアにより回転角度を演算し、出力端子P7から出力する。
【0045】
前記P6の磁場信号は、A/Dコンバータ31に接続されており、時系列的に交互に切換えられたxおよびy方向成分の磁場信号は順次デジタル変換される。このときA/D変換された信号をx軸のデータとy軸のデータとに弁別するため同期信号として前記パルスジェネレータ231の端子P5の切換え信号をマイクロコンピュータ32に入力している。
【0046】
すなわちパルスジェネレータ231の端子P5から出力される前記5μsの切換え信号がロジックレベルの” 1” のときはx方向の磁場信号、そして” 0” のときはy 方向の磁場信号としてコンピュータ32はx、y軸のデータを整列する。
【0047】
角度算出演算は、前記A/D変換されたデータをもとにソフトウエアで行うがここでは前記数1に基づくθ=arctan(Hy/Hx)の演算により、角度と出力信号との関係を直線化する。
【0048】
図5は、角度θと演算された結果の例であり、角度変化に対して出力が線形であることを表している。なお本第2実施形態においては、角度変化が−90度から+90度の180度の領域に対して負から正へ信号が直線的に変化し、それ以上の角度変化については出力はその繰り返しとなる。
【0049】
以上本第2実施形態により磁石1の回転による回転磁場を2つのマグネト・インピーダンス素子21、22によって検出し、その信号の比から角度演算することにより、磁場変動、磁電変換素子の感度変化の影響を受けない安定で高精度の角度検出を可能にするとともに、かかる角度センサを実現するものである。
【0050】
また本第2実施形態においては、一方のマグネト・インピーダンス素子がパルス通電され動作している時には他方のマグネト・インピーダンス素子はパルス通電されていないため動作していないことから、互いに他方のマグネト・インピーダンス素子のパルス通電に伴う動作による電磁的影響を受けることはないため、高精度の回転数検知を可能にするとともに、信号処理回路における同時信号処理をすることはないため、信号処理における干渉も無く、消費電力の低減を可能にするものである。
【0051】
(第3実施形態)
第3実施形態のスロットル開度検知装置は、前記マグネト・インピーダンス磁気検出器2として2つのマグネト・インピーダンス素子21、22と時系列で切換えて信号処理する1つの信号処理回路23をIC化して超小型素子として構成し、回転磁場内に容易に配設できるようにしたものである。
【0052】
すなわち図6に示されるようにマグネト・インピーダンス磁気検出器200は、周囲に検出コイルを202,204を巻回した長さ2mm、直径30μmのアモルファスワイヤ201,203をマグネト・インピーダンス素子とし、それらを互いに直交的に配置しかつその近傍にIC化した信号処理回路205を同一基板に配設したものである。またこの信号処理回路205は、上述の実施形態と同じく切換えで2つのマグネト・インピーダンス素子21、22の信号を処理するものである。
【0053】
また本第3実施形態のスロットル開度検知装置は、2つのマグネト・インピーダンス素子21、22と1つの信号処理回路23とを基板上に一体に形成され、IC化したものであるので、2つのセンサの特性を揃えることが出来るため、精度の高い測定を可能にするとともに、センサを小さくし、高感度化を可能にし、処理回路もシンプルにし、全体として小型化して、重量および消費電力を低減するという効果を奏する。
【0054】
さらに配線用の電極206を備えた2mm×3mmのICパッケージ207に収納することで装置全体を小型化するとともに前記回転磁場内に容易に取り付けることができるようにしたものである。
【0055】
さらに前記マグネト・インピーダンス素子の材料としてアモルファスワイヤを用いることで通常の磁電変換素子では厳しい120℃以上の温度領域においても計測可能にし、温度環境の厳しいエンジンのスロットルポジションセンサとして安定かつ高精度の測定を可能にし、小型化さらに低価格化を実現するものである。
【0056】
【実施例】
以下上述の実施形態のスロットル開度検知装置において、用いることが出来る磁気検出器の実施例につき、図面を用いて説明する。
【0057】
(実施例)
本実施例の磁気検出器は、図7に示されるように自動車分野における適用を考慮して、小型化するとともに高感度化したもので、以下図7ないし図9を用いて説明する。
【0058】
前記磁気検出器2を構成する2つのマグネト・インピーダンス素子21、22の基板100の大きさは、幅0.5mm、高さ0.5mmとし、長手方向の長さを3mmとし、感磁体210、220は、CoFeSiB系合金を使った直径30μmのアモルファスワイヤである。 電磁コイル211、221は、 前記基板100の長手方向に形成した溝100Gの溝面100Sに形成されたコイルの片側211A、221Aと、溝100Gの溝上面112に形成された残り片側のコイル211B、221Bの2層構造により形成したものである。
【0059】
前記溝面111および溝上面112に形成されるコイルの片側211A、221Aおよび残り片側のコイル211B、221Bは、図7および図8に示されるように電極配線基板100の長手方向に形成された溝100Gの溝上面112よりある程度広い範囲にコイルを構成する導電性の磁性金属薄膜を蒸着により形成し、形成された金属薄膜が螺旋状に残るように間隙部を構成する導電性金属薄膜部を選択エッチング手法により除去することにより、コイルの全体の長手方向の長さを1.5mmまたは2mmの長さに亘り形成される。なお図8において、図7のA−A′断面にかかわらず、理解の便のために溝100Gの全面の4面にロの字状にコイルが形成されている状態を示した。
【0060】
電磁コイル211、221の円相当内径(高さと幅で形成される溝断面積と同一面積となる円の直径)は、200μmまたは100μm以下であるのが望ましいので、66μmに一例として設定した。 電磁コイル211、221の1ターン当たりの(単位長さ当たり)の捲線間隔は100μm/巻以下であるのが望ましいので、一例として50μm/巻に設定されている。
【0061】
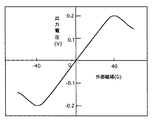
素子基板の長さとして3mmを採用して前記2つのマグネト・インピーダンス素子21、22のアモルファスワイヤ210、220および電磁コイル211、221が、図8に示されるように一つの素子基板としての電極配線基板100上にそれぞれ一体に形成され、前記磁気検出器21、22の両端に配設した電極を介して接続された前記電子回路23(図示せず)も一つの電極配線基板100上に形成され、かかる電子回路23からのセンサ出力を横軸が外部磁場と縦軸が出力電圧を示す図9に示す。
【0062】
本実施例の磁気検出器は、自動車分野における適用を考慮して、小型化、薄型化、小容積化(幅0.5mm、高さ0.5mmとし、長手方向の長さを3mm)を実現しながら、図9から明らかなように40ガウス(G)で0.2Vのフルスケールまでリニアなが出力が得られ、リニアな測定および高感度な測定を実現するものである。
【0063】
また本実施例の磁気検出器は、前記2つのマグネト・インピーダンス素子21、22のアモルファスワイヤ210、220および検知コイルとしての電磁コイル211、221が、全体基板上に一体に形成され、前記磁気検出器21、22の両端に配設した電極を介して接続された前記信号処理回路としての電子回路23も同一全体基板上に形成され、同一のパッケージ内に配設され、前記2つの検知コイルとしての電磁コイルと電子回路とが、同一の基板上にマウントされているので、2つのセンサの特性を揃えることが出来るため、精度の高い測定を可能にするとともに、センサを小さくし、高感度化を可能にし、処理回路もシンプルにし、全体として小型化して、重量および消費電力を低減するという効果を奏する。
【0064】
また本実施例の磁気検出器は、マグネト・インピーダンス素子としてアモルファスワイヤを採用したので、アモルファスワイヤの本来の性質上、120℃の温度環境でも安定な動作が可能なため、自動車における120℃の温度環境でも安定な動作が可能であり、スロットル開度の検出に適するという効果を奏するものである。
【0065】
さらに本実施例の磁気検出器は、マグネト・インピーダンス素子をより高感度な磁気センサとするために、検出コイルとしての電磁コイル211、221の円相当内径の半径を200μmまたは100μm以下にするのが望ましい、本実施例においては一例として66μmに設定し、極めて小さくしてアモルファスワイヤと検出コイルとの電磁結合を大きくすることに対して有効であるとともに、センサの薄型化および小容量化にとっても有効である。
【0066】
また本実施例の磁気検出器は、前記2つのマグネト・インピーダンス素子および信号処理回路を1つの基板にマウント(装荷)することにより、小型かつ取り扱いを容易にすることができ、さらにマグネト・インピーダンス素子が高感度のため回転体とのギャップを1mm以上に大きくしても安定な磁気計測ができるので自動車に取り付ける際に精密な組付け作業を必要としないので生産コストを抑制するという非常に大きな効果を奏する。
【0067】
さらに本実施例においては、2 つのマグネト・インピーダンス素子を所定の精度で管理された自動機で製作するとともに、2つのマグネト・インピーダンス素子をそれぞれ駆動するIC回路からなるパルスジェネレータの2つのドライバー回路の駆動特性およびそれぞれに対応するサンプルホールド回路の2つのアナログスイッチのスイッチ特性を同一とするため、それぞれ近接した場所に回路を形成するようにマスク設計を行い、2つのマグネト・インピーダンス素子の特性を互いに等しくなるようにしたので、2 つのマグネト・インピーダンス素子の特性を互いに等しくすることが出来るものである。
【0068】
本実施例においては、基板100の大きさは、幅0.5mm、高さ0.5mmとし、長手方向の長さを3mmとし、アモルファスワイヤの長さは3mm以下であることから、上述した図9から明らかなように40ガウスで0.2Vのフルスケールまでリニヤーな出力が得られるため、従来ヒステリシス特性や非直線特性を無くすためにアモルファスワイヤにもう一つのコイルを設けてこれにフィードバック電流を流したり、バイアス電流を流したりするフィードバック技術の必要性を解消するものである。これにより常時直流電流を流すことが不要となり低消費電力化が可能となった。またバイアスコイルを省略できマグネト・インピーダンス素子をシンプル化するものである。
【0069】
上述の実施形態は、説明のために例示したもので、本発明としてはそれらに限定されるものでは無く、特許請求の範囲、発明の詳細な説明および図面の記載から当業者が認識することができる本発明の技術的思想に反しない限り、変更および付加が可能である。
【0070】
上述の実施形態において説明したように、本発明は、回転軸10に取り付けられたスロットル開度検出用磁石1の回転に伴う2つの磁場信号の比に基づいて角度計測を行うことで磁場強さの変化、磁電変換素子の感度変化に対して安定かつ高温度領域でも計測でき、また小型,安価なスロットル開度センサを実現するものであって、スロットル開度検出用磁石以外の用途の磁石の回転角を前記マグネト・インピーダンス素子によって検出すれば、スロットル開度以外の回転要素の回転角を検出する用途への適用が可能である。
【図面の簡単な説明】
【図1】本発明の第1実施形態のスロットル開度検知装置を示すブロック図である。
【図2】本第1実施形態のスロットル開度検知装置における計測原理を説明するための説明図である。
【図3】本発明の第2実施形態のスロットル開度検知装置を示す詳細ブロック図である。
【図4】本第2実施形態のスロットル開度検知装置における出力波形を示す線図である。
【図5】本第2実施形態の操舵角検知装置における角度変化に対する出力の変化の関係を示す線図である。
【図6】本発明の第3実施形態におけるマグネト・インピーダンス磁気検出器のパッケージを示す平面図である。
【図7】本発明の実施例における磁気検出器を示す平面図である。
【図8】本実施例における磁気検出器を示す図7中A−A′線に沿う横断面図である。
【図9】本実施例における磁気検出器の外部磁場と出力電圧の関係を示す線図である。図である。
【符号の説明】
1 スロットル開度検出用磁石
2 磁気センサ
20 マグネト・インピーダンス磁気検出器
21、22 マグネト・インピーダンス素子
23 信号処理回路
3 演算回路
Claims (4)
- 回転するスロットル開度検出用磁石による磁場を検出する磁気センサと、検知された磁場の変化を信号処理する信号処理回路および該信号処理回路から出力された出力信号に基づきスロットル開度を演算する演算回路を備えたスロットル開度検知装置において、
前記磁気センサが、異なった方向に配設された2つのマグネト・インピーダンス素子によって構成されるとともに、
前記信号処理回路が、前記2つのマグネト・インピーダンス素子からの出力を切換手段によって交互に切り替えて信号処理する1個の信号処理回路から成る
マグネト・インピーダンス磁気検出器を備え、
前記演算回路が、前記2つのマグネト・インピーダンス素子によって検知され、前記信号処理回路から交互に出力される前記2つのマグネト・インピーダンス素子の出力の比に基づきスロットル開度を検知する
ことを特徴とするスロットル開度検知装置。 - 請求項1において、
前記2つのマグネト・インピーダンス素子が、直交関係に配置され、
前記演算回路が,一方のマグネト・インピーダンス素子の出力Hxと他方のマグネト・インピーダンスセンサ素子の出力Hyから,前記スロットル開度検出用磁石の回転角度θを,数1の関係によって算出する
- 請求項2において、
前記2つのマグネト・インピーダンス素子が、アモルファスワイヤと該アモルファスワイヤの回りに巻装された検知コイルとから成り、
前記1個の信号処理回路が、前記2つのマグネト・インピーダンス素子を交互に切換えてパルス通電するパルスジェネレータと、これに同期して得られる2つの磁気信号を交互に所定の時間保持することにより時系列で出力するサンプルホールド回路からなる1組の電子回路である
ことを特徴とするスロットル開度検知装置。 - 請求項3において、
前記検知コイルと前記1組の電子回路とが、同一の基板上に形成されている
ことを特徴とするスロットル開度検知装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003054782A JP4230249B2 (ja) | 2003-02-28 | 2003-02-28 | スロットル開度検知装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003054782A JP4230249B2 (ja) | 2003-02-28 | 2003-02-28 | スロットル開度検知装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004264149A true JP2004264149A (ja) | 2004-09-24 |
| JP4230249B2 JP4230249B2 (ja) | 2009-02-25 |
Family
ID=33119016
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003054782A Expired - Fee Related JP4230249B2 (ja) | 2003-02-28 | 2003-02-28 | スロットル開度検知装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4230249B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007287117A (ja) * | 2006-04-17 | 2007-11-01 | Jae Woo Yang | 単一ホールセンサーを利用した球形関節構造の非接触式電子ジョイステック{ContactlessElectronJoystickofUniversalJointStructureUsingSingleHoleSensor} |
| JP2009506337A (ja) * | 2005-08-27 | 2009-02-12 | ヴァレオ システム デシュヤージュ | 車両のための電動補助駆動装置 |
| JP2011059091A (ja) * | 2009-09-07 | 2011-03-24 | Aichi Micro Intelligent Corp | 室内位置検出装置 |
-
2003
- 2003-02-28 JP JP2003054782A patent/JP4230249B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009506337A (ja) * | 2005-08-27 | 2009-02-12 | ヴァレオ システム デシュヤージュ | 車両のための電動補助駆動装置 |
| JP2007287117A (ja) * | 2006-04-17 | 2007-11-01 | Jae Woo Yang | 単一ホールセンサーを利用した球形関節構造の非接触式電子ジョイステック{ContactlessElectronJoystickofUniversalJointStructureUsingSingleHoleSensor} |
| JP2011059091A (ja) * | 2009-09-07 | 2011-03-24 | Aichi Micro Intelligent Corp | 室内位置検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4230249B2 (ja) | 2009-02-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3596850B2 (ja) | マルチタップ受信器捲線を有する誘導性位置トランスデューサ及び相対位置を判別するための方法 | |
| US7219549B2 (en) | Accelerometer with cantilever and magnetic field detector | |
| US8106649B2 (en) | Angle detecting apparatus and angle detecting method | |
| EP0840095B1 (en) | Magnetic encoder | |
| EP2244070A1 (en) | Rotation angle detection device, rotary machine, and rotation angle detection method | |
| JP4529783B2 (ja) | マグネト・インピーダンス・センサ素子 | |
| US20120182010A1 (en) | Magnetic field sensor | |
| EP1909074A1 (en) | Rotation angle detection apparatus | |
| JPH08313295A (ja) | 誘導電流を用いた位置検出トランスデューサ | |
| US6513396B2 (en) | Magnetic sensor, magnetic sensor device, and torque sensor | |
| KR20020006452A (ko) | 회전각 센서 | |
| JPH09152473A (ja) | 磁気探知装置 | |
| WO2010014877A2 (en) | Nanowire magnetic compass and position sensor | |
| JP3352366B2 (ja) | パルス信号発生装置 | |
| JP5227527B2 (ja) | 磁性体検出センサ | |
| EP1774343A1 (en) | Integrated magnetoresitive speed and direction sensor | |
| JP4230249B2 (ja) | スロットル開度検知装置 | |
| JP4167092B2 (ja) | 自動車用操舵装置の操舵角検知装置 | |
| JP5243725B2 (ja) | 磁性体検出センサ | |
| JP2004264158A (ja) | 自動車用電流センサ | |
| JP2008151534A (ja) | 磁束測定法及び磁気センサー | |
| JP4737372B2 (ja) | 回転角度検出装置 | |
| JPH10300763A (ja) | 磁気センサ | |
| JP2004264156A (ja) | 自動車用回転体の回転数検知装置 | |
| JP2010223595A (ja) | 位置検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060131 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071003 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080730 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080929 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20081118 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081203 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111212 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121212 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121212 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121212 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131212 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |