JP2004105539A - カメラを用いた手術システムにおける画像表示方法および手術支援装置 - Google Patents
カメラを用いた手術システムにおける画像表示方法および手術支援装置 Download PDFInfo
- Publication number
- JP2004105539A JP2004105539A JP2002273652A JP2002273652A JP2004105539A JP 2004105539 A JP2004105539 A JP 2004105539A JP 2002273652 A JP2002273652 A JP 2002273652A JP 2002273652 A JP2002273652 A JP 2002273652A JP 2004105539 A JP2004105539 A JP 2004105539A
- Authority
- JP
- Japan
- Prior art keywords
- camera
- endoscope
- switch
- screen
- instruction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Abstract
【課題】カメラの操作が容易に確認でき、効率的かつ円滑な医療作業を実現すること。
【解決手段】まず、操作指示入力部10は、内視鏡50の操作者からの操作指示を受け付ける。次に、制御部20は、操作指示入力部10より入力された操作指示に基づいてマニピュレータ40を制御する。ここで、制御部20は、操作指示提示部30に、操作指示を提示させる。なお、操作指示は、例えば、視野の移動、または、拡大・縮小である。これにより、内視鏡50の操作者を含めた医療スタッフは、カメラの操作指示を操作指示提示部30から容易に確認でき、効率的な医療作業を実現できる。また、制御部20は、可動範囲を超えた操作指示入力部10からの操作指示などの状況に応じた警告を、操作指示提示部30に提示することで、円滑な医療作業を実現することができる。
【選択図】 図1
【解決手段】まず、操作指示入力部10は、内視鏡50の操作者からの操作指示を受け付ける。次に、制御部20は、操作指示入力部10より入力された操作指示に基づいてマニピュレータ40を制御する。ここで、制御部20は、操作指示提示部30に、操作指示を提示させる。なお、操作指示は、例えば、視野の移動、または、拡大・縮小である。これにより、内視鏡50の操作者を含めた医療スタッフは、カメラの操作指示を操作指示提示部30から容易に確認でき、効率的な医療作業を実現できる。また、制御部20は、可動範囲を超えた操作指示入力部10からの操作指示などの状況に応じた警告を、操作指示提示部30に提示することで、円滑な医療作業を実現することができる。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、カメラを用いた手術システムにおける画像表示方法および手術支援装置に関する。
【0002】
【従来の技術】
カメラで撮影した画像を見ながら行う内視鏡手術が知られている(例えば、特許文献1参照。)。従来、この内視鏡手術は、かん子等の術具を操作して手術を行う術具の操作者とカメラの操作者とが異なっていた。従って、術具の操作者が望むようにカメラを操作することが困難であった。
【0003】
このため、術具の操作者がカメラの操作スイッチを操作することで、術具の操作と併せてカメラの操作も行えるようにしたシステムが開発されている。例えば、術具の操作者がカメラの操作スイッチの右ボタンを押下するとカメラの撮像範囲が右に移動し、左ボタンを押下するとカメラの撮像範囲が左に移動し、上ボタンを押下するとカメラの撮像範囲が上に移動し、下ボタンを押下するとカメラの撮像範囲が下に移動するようなシステムが開発されている。
【0004】
【特許文献1】
特開平10−118015号公報
【0005】
【発明が解決しようとする課題】
しかし、術具の操作者は自分が操作するカメラが撮影した画像を注視しながら手術を行っている。このため、カメラの操作スイッチを目視して確認するまでもなく、どのような操作指示がカメラの操作スイッチを介してカメラになされているのか、つまり、カメラの操作に関して自分が実際にどのようなスイッチ操作を行っているのかを容易に確認することができれば大変都合がよい。また、このような内視鏡手術は、術具の操作者と何人もの医療スタッフとが協調して手術を行うが、術具の操作者の意思などが迅速に各医療スタッフに伝達されるようにできると大変都合がよい。
【0006】
そこで本発明は、上記を鑑み、カメラを用いた手術システムにおいて、カメラの操作が容易に確認でき、効率的かつ円滑な医療作業を実現することを目的として考えられたものである。
【0007】
【課題を解決するための手段】
本発明は、前記目的を達成するために創案されたものであり、術具を操作しつつスイッチを操作してカメラの撮像範囲の移動を行い、該カメラが撮影した画面を見ながら行う手術に用いられる画面表示装置における画像表示方法であって、前記スイッチにより撮像範囲を移動する操作を行うと、移動方向に対応した方向指示を画面上に表示し、前記スイッチにより該カメラが撮影した画像を拡大・縮小する操作を行うと、前記拡大・縮小に対応した拡大又は縮小の指示を画面上に表示することを特徴とする。かかる方法によれば、操作者を含めた医療スタッフは、カメラからの撮影画面より、操作指示を直接参照できる。その他の解決手段については、以下の実施形態で詳細に説明するものとする。
【0008】
【発明の実施の形態】
以下に、本実施形態のカメラを用いた手術システムにおける画像表示方法および手術支援装置を具現化した、医療用マニピュレータの操作用インタフェースにおける第1実施形態について、図面を参照して詳細に説明する。
【0009】
まず、本実施形態のカメラを用いた手術システムにおける画像表示方法および手術支援装置を具現化した、医療用マニピュレータの操作用インタフェースを含む医療用マニピュレータを用いた手術システムの構成について、図1〜図3を参照して説明する。
【0010】
図1に示すように、医療用マニピュレータを用いた手術システムは、人間がカメラを操作する代わりに、医療用マニピュレータを用いてカメラを操作する機能を有する。このため、医療用マニピュレータを用いた手術システムは、操作者の操作指示を入力する操作指示入力部10と、操作指示入力部10より入力された操作指示に基づいてマニピュレータ40を制御する制御部20と、制御部20より伝達された操作指示を提示する操作指示提示部30と、操作者の操作指示により操作されるマニピュレータ40と、マニピュレータ40により撮像方向(視野)が移動されるカメラである内視鏡50とを含んで構築されている。内視鏡50は、患者60の身体に開けられた挿入孔61に嵌挿されたトラカールTCを介して体内に挿通され、患者60の体内を撮影する。なお、制御部20は、請求項の「手術支援装置」に相当する。
【0011】
操作指示入力部10は、マニピュレータ40の操作者からの操作指示を入力する機能を有し、操作者が手術を行う際に用いる術具である鉗子11と、マニピュレータ40を用いて内視鏡50を操作するために入力する操作指示を受けて制御部20へと操作指示を伝送する術具スイッチ12とを有する。つまり、操作指示入力部10は、鉗子11に術具スイッチ12が取り付けられる構成である。なお、鉗子11は、内視鏡50用の挿入孔61とは異なる別の挿入孔に嵌挿された別のトラカール(図示外)を介して、患者60の体内に挿入される。ちなみに、術具スイッチ12は、請求項のスイッチに相当する。
【0012】
制御部20は、操作者からの操作指示を操作指示提示部30およびマニピュレータ40に中継する機能を有する。このため制御部20は、内視鏡50を体内への挿入孔61に固定するまでの、内視鏡50の大まかな位置を決めるために操作される手動操作ペンダントスイッチ21と、患者60の発作などの緊急時にマニピュレータ40の制御を停止する非常停止ペンダントスイッチ22と、術具スイッチ12、手動操作ペンダントスイッチ21、並びに非常停止ペンダントスイッチ22からの入力を受け、操作指示提示部30およびマニピュレータ40に中継するコントローラ23と、コントローラ23が正常に動作しているかを監視するコントローラ監視装置24とを有する。
【0013】
操作指示提示部30は、操作指示入力部10からの操作指示と内視鏡50からの撮影画像を医療作業者に提示する手段を有し、操作指示入力部10からの操作指示と内視鏡50からの撮影画像を1つの画像に合成するスーパーインポーザ31と、スーパーインポーザ31が合成した画面を医療作業者に提示するディスプレイ32とを有する。なお、操作指示入力部10、制御部20、並びに、操作指示提示部30は、本実施形態のカメラを用いた手術システムにおける画像表示方法および手術支援装置を具現化した、医療用マニピュレータの操作用インタフェースを構成する。
【0014】
マニピュレータ40は、人間に代わって内視鏡50を操作指示により操作する機能を有する。このため、マニピュレータ40は、図2に示すように、マニピュレータ40の高さを調整する昇降装置41と、モータなどの駆動手段により構成されるリンク駆動部42と、リンク駆動部42に接続され、リンク駆動部42の駆動に連動して形を変えるリンク部43と、リンク駆動部42の駆動を監視するエンコーダ44と、関節で接続されたアームで構成され、手動によって関節の角度を変化されることで形を変えるフレキシブルアーム45と、内視鏡50を把持する内視鏡ホルダ46と、内視鏡50のズーム部を回転させる内視鏡ホルダのモータ47とを有する。なお、フレキシブルアーム45は、一端をリンク部43と接続され、別の一端を内視鏡ホルダ46に接続されている。
【0015】
内視鏡50は、光学式かつズーム機能を有することで、患者の体内を撮影し、撮影画像をスーパーインポーザ31に送る機能を有し、その先端が、内視鏡固定具51により体内への挿入孔61に固定されている。内視鏡50の移動について、図3を参照して説明する。図3は、内視鏡50が、50Aの位置から50Bの位置に移動する様子を示す。内視鏡50の移動は、内視鏡固定具51を中心とした内視鏡50の回転運動(2次元方向の首振り運動)となる。それにより、内視鏡50と体内への挿入孔61との角度が変化することで、図3に示すように、内視鏡50の視野が変化する。この構成では、内視鏡50の先端は、内視鏡固定具51を中心にして曲面を描くように運動(2次元方向の首振り運動)する。体内の方向(奥行き方向)への運動は、安全を考慮したことにより、ズーム機能により仮想的に行うこととしている。
【0016】
次に図1〜図3、及び図5を参照しつつ、医療用マニピュレータの操作用インタフェースの動作を、図4に沿って説明する。図4は、医療用マニピュレータを用いた手術システムについて、時系列に、処理及び通信を説明したフローチャートである。
【0017】
まず、手術システムは、医療スタッフに、手術を行う前準備(S101)を行わせる。具体的には、手術システムは、医療スタッフに、内視鏡ホルダ46と内視鏡固定具51に内視鏡50を把持させ、鉗子11などの術具に術具スイッチ12を装着させる。これにより、手術システムは、術具スイッチ12の操作者に、内視鏡50の操作と同時に片手に術具としての鉗子11を、もう一方の片手に他の術具(ハサミなど)を用いた手術を行わせることが可能となる。
【0018】
次に、医療スタッフは、手術を行う際に、患者60の体内への挿入孔61に内視鏡50の先端を挿入して固定することで、内視鏡50の位置決めを行う(S102)。具体的には、まず、医療スタッフは、昇降装置41を手動操作ペンダントスイッチ21によって操作することで、マニピュレータ40の高さを調整する。次に、医療スタッフは、フレキシブルアーム45の関節を手動により調整することで、フレキシブルアーム45の形を決め、フレキシブルアーム45の先端である内視鏡ホルダ46に取り付けられた内視鏡50の位置を決める。そして、医療スタッフは、内視鏡50の先端を体内への挿入孔61に挿入し、内視鏡固定具51を用いて、体内への挿入孔61に内視鏡50を固定させる。以上で、体内への挿入孔61に内視鏡50を固定させる手順を説明した。体内への挿入孔61への内視鏡50の固定手順は、内視鏡50の位置を変更する度に、繰り返される。内視鏡50の位置を変更する契機は、例えば、仰向けから横向きなどの患者60の姿勢の移動、体内への挿入孔61について別の挿入孔への変更、並びに、リンク部43を操作させて得られる視野を超えた視野を確保すること、が挙げられる。
【0019】
そして、操作者は、術具スイッチ12を用いて、内視鏡50の操作を指示する(S103)。操作指示とは、例えば、視野の移動又はズームの変更である。さらに、術具スイッチ12からの操作指示を受信したコントローラ23は、受信した操作指示によりマニピュレータ40を制御するとともに、受信した操作指示を時系列に記憶する(S104)。記憶された操作指示は、随時参照可能である。なお、記憶された操作指示は、例えば、コントローラ23が有するボタンを連続して10回ON・OFFを繰り返すと、ディスプレイ32または他のコンピュータの画面に出力される。
【0020】
また、操作者が把持する術具スイッチ12は、鉗子11による手術作業により、向きが変わることがある。そこで、コントローラ23は、術具スイッチ12から操作指示を受信すると、予め設定された変換形式を参照して、操作指示をその変換形式に基づいて変換し、変換された操作指示によりマニピュレータ40を制御してもよい。これにより、操作者は、術具スイッチ12の向きによる影響を受けずに、術具スイッチ12から操作を指示できる。なお、コントローラ23に予め設定された変換形式は、請求項の「所定の変換形式」に相当する。以下、操作指示の内容ごとに(S105)動作を説明する。
【0021】
まず、内視鏡50の視野の移動(S106)について、図5を参照して説明する。術具スイッチ12が有する上下左右のボタンを押すと、押されたボタンに関する指示が術具スイッチ12からコントローラ23に伝達される。コントローラ23は、伝達された指示に対応してマニピュレータ40のリンク駆動部42を制御する。リンク駆動部42は、コントローラ23からの制御により、リンク部43と接続されている関節を回転させる。関節の回転によって、リンク部43は形を変形させ、リンク部43の先端に接続されているフレキシブルアーム45を通じて、内視鏡ホルダ46の位置が変化する。ここで、内視鏡ホルダ46に把持されている内視鏡50の先端近傍は内視鏡固定具51により固定されているので、内視鏡50は、内視鏡固定具51を中心とした回転運動(2次元方向の首振り運動)を行う。よって、回転運動(2次元方向の首振り運動)により、内視鏡50の視野が移動する(S106)。
【0022】
次に、内視鏡50のズームの変更(S107)について説明する。操作者が、術具スイッチ12が有するズーム変更を示す拡大または縮小のボタンを押すと、押されたボタンに関する指示が術具スイッチ12からコントローラ23に伝達される。コントローラ23は、伝達された指示により、内視鏡ホルダのモータ47を制御する。内視鏡ホルダのモータ47は、コントローラ23からの制御により、内視鏡50と接続されている接点を回転させる。接点の回転によって、内視鏡50のレンズの焦点は移動し、内視鏡50のズームは変更される(S107)。
【0023】
また、内視鏡50への操作指示が行われない場合は(S105、なし)、内視鏡50は固定されたままとなる。これにより、内視鏡50を前後方向(体内方向)に仮想的に移動することができる。つまり、撮像対象部位(手術野)の拡大撮影が可能になる。
【0024】
内視鏡50は、視野の移動又はズームの変更により、操作者の所望の撮影画像をスーパーインポーザ31に出力する(S108)。また、コントローラ23は、術具スイッチ12からの操作指示を画像化して、スーパーインポーザ31に出力する。スーパーインポーザ31は、入力された内視鏡50の撮影画像と、術具スイッチ12からの操作指示とを合成し(S109)、ディスプレイ32に出力する。ディスプレイ32は、スーパーインポーザ31から出力された画像を画面に表示する(S110)。なお、内視鏡の操作指示(S103)から画面の表示(S110)までの動作は、操作者が手術システムを停止させるまで繰り返される(S111、No)。以上、医療用マニピュレータの操作用インタフェースの動作を説明した。
【0025】
以上、本発明の第1実施形態について説明した。かかる方法によれば、カメラの操作者だけでなく、医療現場にいるスタッフが操作指示を把握できる。それにより、カメラの操作指示に対応した医療作業が容易に実行でき、医療現場にいるスタッフは医療作業を効率よく分担できる。また、操作指示の記録により、カメラの操作後に制御情報を参照することができる。その結果、制御情報の追跡をすることで、医療作業後の制御情報の入力が確認できる。さらに、操作者は、カメラの操作手段の向きに依存しない、容易な操作を実現できる。
【0026】
以下に、本実施形態のカメラを用いた手術システムにおける画像表示方法および手術支援装置を具現化した、医療用マニピュレータの操作用インタフェースにおける第2実施形態について説明する。第2実施形態は、上記第1実施形態において、起こりうる緊急の事態とその対処法を行う動作を付加するもので、医療用マニピュレータを用いた手術システムの構成要素および正常時の動作は第1実施形態と同様とする。従って、第1実施形態と同様の構成要素および動作については、同じ符号を付して説明を省略する。
【0027】
以下、図1〜図4を参照して説明する。まず、手術を行う前準備(S101)として、第1実施形態で述べた準備に加えて、手術システムは、コントローラ23に、内視鏡50を操作するのに用いられるマニピュレータ40が操作可能かを、例えば、コントローラ23が点検用の制御信号を送信することにより点検させる。制御信号を受信する点検対象は、術具スイッチ12、リンク駆動部42、内視鏡ホルダのモータ47、並びに、エンコーダ44である。なお、エンコーダ44は、リンク駆動部42の不具合を発見する手段として使用され、リンク駆動部42と一体構造になっている(図2および図3参照)。これにより、手術システムは、例えば、リンク駆動部42がコントローラ23からの制御指示を受け付けないなどの動作不良を、操作者に手術前に知らせることができる。なお、上記の点検は、コントローラ23の電源投入時又は操作者がコントローラ23に点検を指示する時を契機として行われる。ここで、手術システムが動作不良を操作者に知らせる一例を示す。手術システムは、電源を入れて動作可能になるまでの間に自己診断を実施しており、その時点で不具合が発見されると動作を中断する。また、手術システムは、動作中にも手術システムを構成する装置の状況を常時監視するステータスモニターが作動しているため、この時に不具合が発見されると、手術システムは停止する。これら、不具合発見時にはディスプレイ32にアラーム情報として、文字が表示される。
【0028】
次に、手術を行う際に、コントローラ23が何らかの不都合により、暴走動作に陥る場合も考えられる(S106またはS107の動作不良)。その場合、患者への影響を最小限に抑えるため、コントローラ23は、外部からの指示により、緊急に停止する機能を有する。そして、コントローラ監視装置24は、コントローラ23の暴走動作を監視し、暴走動作を検知したことを契機に、コントローラ23を停止させる。なお、コントローラ監視装置24は、コントローラ23の監視を定期的に行うために、ある一定時間毎に相互で通信を行う。この通信が途切れた時点で、コントローラ監視装置24は、装置の故障、ハングアップ等の不正動作が発生したことが分かる。
【0029】
さらに、手術中に、患者60の発作などにより、内視鏡50への操作を緊急に停止させる必要がある場合も考えられる(S103の操作指示の停止)。その場合、コントローラ23は、非常停止ペンダントスイッチ22が押されたのを契機に、マニピュレータ40の動作である、昇降装置41、リンク駆動部42、並びに、内視鏡ホルダのモータ47の動作を、術具スイッチ12及び手動操作ペンダントスイッチ21からの動作指示に係らず、電源供給を遮断して緊急に停止する。そして、患者60の発作などの緊急事態が収まったら、コントローラ23の電源を再起動することで、緊急停止を解除できる。なお、緊急時に、リンク駆動部42は固定される。
【0030】
また、術具スイッチ12の操作者は、術具スイッチ12の操作と並行して鉗子11を用いて手術を行うので、マニピュレータ40の可動範囲を超えた術具スイッチ12の操作を行ってしまうことも考えられる(S103の操作指示のミス)。その場合、コントローラ23は、マニピュレータ40の可動範囲を監視し、可動範囲を超えた場合に、ブザーなどの警告を発するとともに、手動操作ペンダントスイッチ21又は術具スイッチ12からの操作指示に係らず、マニピュレータ40への制御を停止する。なお、コントローラ23は、エンコーダ44を用いて、リンク駆動部42のモータの回転を監視する。コントローラ23は、リンク部43の可動範囲を超える動作が指示された場合又は運転中に出力軸が拘束された場合を、エンコーダ44などにより検知すると、ブザーなどの警告を発し、緊急停止する。
【0031】
以上、本発明の第2実施形態について説明した。かかる方法によれば、操作者は、コントローラ23による可動範囲を超えた操作を警告する機能により、カメラの操作中にカメラの可動範囲を知ることができる。また、操作者は、手術システムの点検機能により、医療作業前に確実にカメラを制御できる。さらに、医療スタッフは、コントローラ23の緊急に停止する機能により、手術の状況に応じ、柔軟に手術システムを使用できる。
【0032】
以下に、本実施形態のカメラを用いた手術システムにおける画像表示方法および手術支援装置を具現化した、医療用マニピュレータの操作用インタフェースにおける第3実施形態について説明する。第3実施形態は、上記第1実施形態において、ディスプレイ32に表示される画像内容をより具体的に説明するものである。従って、医療用マニピュレータを用いた手術システムの構成要素および正常時の動作は第1実施形態と同様とし、第1実施形態と同様の構成要素および動作については、同じ符号を付して説明を省略する。
【0033】
図6にディスプレイ32に出力される(S110)表示画面を示す。表示画面100は、内視鏡50により撮影された内視鏡画像110が、画面中央に表示されている。表示画面100では、術具スイッチ12からの操作指示が行われていないので、内視鏡画像110のみの表示となる。
【0034】
次に、術具スイッチ12から視野の移動を指示する場合の表示画面を図7に示す。表示画面100Aは、視野を左に移動する指示を行っている間に表示される。中央に配置されている内視鏡画像110に加えて、視野を左に移動する指示を示す指示印120Aが、内視鏡画像110の左に配置されている。これにより、操作者が視野を左に移動していることを、操作者を含めた医療スタッフが確認できる。また、視野を右に移動する指示については、表示画面100Bにおいて、視野を右に移動する指示を示す指示印120Bを内視鏡画像110の右に表示させることで、操作者が視野を右に移動していることを、操作者を含めた医療スタッフが確認できる。さらに、表示画面100Cは、横方向の視野移動と縦方向の視野移動とが同時に指示された場合に表示される。例えば、右と上とが同時に指示されると、右上に移動することを示す指示印120Cが、内視鏡画像110の右上に配置される。同様にして、指示印120Dは右下への視野移動を、指示印120Eは左上への視野移動を、並びに、指示印120Fは左下への視野移動をそれぞれ示す。
【0035】
そして、術具スイッチ12からズームの変更を指示する場合の表示画面を図8に示す。表示画面100Dは、拡大のズーム操作を行っている間に表示される。中央に配置されている内視鏡画像110に加えて、内視鏡画像110の左右両脇に、拡大する指示を示す指示印120Gが配置されている。指示印120Gは、内視鏡画像110の中心の方向を指すことにより、操作者が拡大のズーム操作を行っていることを、操作者を含めた医療スタッフが確認できる。また、表示画面100Eは、縮小のズーム操作を行っている間に表示される。中央に配置されている内視鏡画像110に加えて、内視鏡画像110の左右両脇に、縮小する指示を示す指示印120Hが配置されている。指示印120Hは、内視鏡画像110から外側の方向を指すことにより、操作者が縮小のズーム操作を行っていることを、操作者を含めた医療スタッフが確認できる。
【0036】
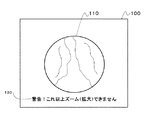
また、マニピュレータ40の警告を通知する表示画面を図9に示す。ここで警告とは、例えば、可動範囲を超えた術具スイッチ12の操作が行われた際に、その旨を警告することである。表示画面100は、内視鏡画像110に加え、警告の内容130を表示する。これにより、医療スタッフは、表示画面100から警告の内容130を知ることができ、警告の内容130に応じた適切な処置をすばやく行うことが可能となる。
【0037】
以上、本発明の第3実施形態について説明した。かかる方法によれば、操作者を含めた医療スタッフは、カメラからの撮影画面より、操作指示を直接参照できる。その結果、撮影画面と操作指示を容易にかつすばやく比較することが可能となる。また、操作者は、カメラの操作中にカメラの可動範囲を知ることができる。
【0038】
なお、図10に本実施形態のカメラを用いた手術システムにおける機能ブロック図を示す。本機能ブロック図は、カメラを用いた手術システムの構成要素と、その構成要素によって実現される各機能との包含関係を示している。
【0039】
まず、術具スイッチ12が実現する機能は、リンク部43の動作を入力するリンク部動作機能、および、内視鏡50の動作を入力する内視鏡動作機能である。
【0040】
次に、手動操作ペンダントスイッチ21が実現する機能は、昇降装置41の動作を入力する昇降装置動作機能、リンク部43を手動で可動させることを許可するリンク部手動可動機能、ならびに、リンク部43を原点に移動するリンク部原点移動機能である。さらに、非常停止ペンダントスイッチ22が実現する機能は、非常時に本実施形態のカメラを用いた手術システムを停止させる非常停止入力機能である。
【0041】
そして、制御部20および操作指示提示部30が実現する機能は、カメラの制御情報を伝達する昇降装置、リンク駆動装置の昇降、リンク動作制御機能、カメラの制御情報のログを記録するログデータ記録機能、操作指示を提示する情報提示機能、コントローラ23の不良状態を監視するH/W状態監視機能、緊急使用時の動作不良を未然に防ぐための定期的な動作点検に使用するDiag機能、ならびに、本実施形態のカメラを用いた手術システムの電源を投入する際に手術システムの動作を確認する始業前点検機能である。
【0042】
さらに、マニピュレータ40および内視鏡固定具51が実現する機能は、昇降装置41の位置を決める昇降位置決め機能、リンク部43を動作させるためにリンク駆動部42が動作するリンク部動作機能、フレキシブルアーム45が内視鏡50を把持する内視鏡保持機能、ならびに、フレキシブルアーム45が内視鏡50の位置を決める内視鏡位置決め機能である。
【0043】
以上説明した本発明は、発明の趣旨を逸脱しない範囲で広く変形実施することができる。
【0044】
例えば、内視鏡50に操作を指示するための入力手段として、鉗子11に取り付けられた術具スイッチ12を用いたが、鉗子11以外の術具に術具スイッチ12を取り付けてもよく、また、予め術具スイッチ12を備え付けてある任意の術具を用いてもよい。さらに、術具ではなく、操作者の体の一部にスイッチを取り付け、操作者の体の動きにより、操作指示を与える形式としてもよい。
【0045】
また、操作者の操作指示による内視鏡50の視野移動及びズームの速度について、操作が指示された時間に一定の速度でも、可変の速度でもよい。可変の速度とは、例えば、内視鏡50の急な移動により患者の体内に接触することを防ぐために、操作指示が行われてから一定時間は速度を遅くし、一定時間が過ぎた後は、速度を早める、などである。
【0046】
さらに、操作者の操作指示により操作者の所望の映像を写す手段として、マニピュレータ40によって視野移動及びズームの変更を行う内視鏡50を用いたが、操作者が操作するスイッチから、内視鏡50に視野移動及びズームの変更を行う機能を、内視鏡50にもたせてもよいし、内視鏡50以外の撮影手段を用いてもよい。
【0047】
また、ディスプレイ32において表示される内視鏡画像110と内視鏡50への指示印及び警告内容について、同一の画面に表示する形式を用いたが、別々の画面に表示してもよい。また、特定の内視鏡50への指示印及び警告内容について、画面で表示するかわりに、発光装置による光で表示し、指示内容または警告内容ごとに光の色をかえてもよい。また、画面で表示するかわりに、指示内容または警告内容ごとに、特定の音またはメロディを発するようにしてもよい。
【0048】
さらに、ディスプレイ32において表示される内視鏡画像110と内視鏡50への指示印及び警告内容について、移動方向並びに拡大または縮小の動作を、四角形を用いて表現したが、文字表示など他の手段を用いて表現してもよい。また、警告内容について、文字表示により表現したが、記号など他の表現手段を用いて表現してもよい。ここで、文字表示とは、例えば、移動方向の上下左右に対応して、漢字表記(上・下・左・右)または英語の頭文字表記(U・D・L・R)である。
【0049】
また、内視鏡50に操作を指示するための入力パラメータとして、視野の移動及びズームの変更を例示したが、内視鏡50の視野に十分な明るさを確保するための光源を内視鏡50が与える場合の光の量など、他のパラメータを含めてもよい。
【0050】
さらに、マニピュレータ40によって内視鏡50のズームを変更することで、内視鏡画像110を拡大・縮小する形式を用いたが、操作者の操作指示により内視鏡画像110を画像処理などの他の手段を用いて拡大・縮小してもよい。
【0051】
また、コントローラ23が正常に動作しているかを監視するコントローラ監視装置24は、コントローラ23とは別の装置として構成したが、コントローラ監視装置24の機能をソフトウェアとして、コントローラ23の内部に組み込んでもよい。
【0052】
【発明の効果】
本発明により、操作者を含めた医療スタッフは、カメラからの撮影画面より、操作指示を直接参照できる。その結果、撮影画面と操作指示を容易にかつすばやく比較することが可能となる。よって、効率的かつ安全な手術を行うことができる。
【図面の簡単な説明】
【図1】本発明の実施形態に係る医療用マニピュレータの操作用インタフェースを含む医療用マニピュレータを用いた手術システムの概略構成図である。
【図2】本発明の実施形態に係る医療用マニピュレータの構成図である。
【図3】本発明の実施形態に係る医療用マニピュレータの移動を示す構成図である。
【図4】本発明の実施形態に係る医療用マニピュレータの操作用インタフェースの動作を示すフローチャートである。
【図5】本発明の実施形態に係る医療用マニピュレータのリンク部の移動を示す構成図である。
【図6】本発明の第3実施形態であるディスプレイの表示画面である。
【図7】本発明の第3実施形態であるディスプレイの表示画面において、視野の移動指示を表示する画面図である。
【図8】本発明の第3実施形態であるディスプレイの表示画面において、ズームの変更指示を表示する画面図である。
【図9】本発明の第3実施形態であるディスプレイの表示画面において、警告を表示する画面図である。
【図10】本発明の実施形態に係る医療用マニピュレータを用いた手術システムの機能ブロック図である。
【符号の説明】
10…操作指示入力部
12…術具スイッチ
20…制御部
23…コントローラ
30…操作指示提示部
31…スーパーインポーザ
32…ディスプレイ
40…マニピュレータ
50…内視鏡
60…患者
【発明の属する技術分野】
本発明は、カメラを用いた手術システムにおける画像表示方法および手術支援装置に関する。
【0002】
【従来の技術】
カメラで撮影した画像を見ながら行う内視鏡手術が知られている(例えば、特許文献1参照。)。従来、この内視鏡手術は、かん子等の術具を操作して手術を行う術具の操作者とカメラの操作者とが異なっていた。従って、術具の操作者が望むようにカメラを操作することが困難であった。
【0003】
このため、術具の操作者がカメラの操作スイッチを操作することで、術具の操作と併せてカメラの操作も行えるようにしたシステムが開発されている。例えば、術具の操作者がカメラの操作スイッチの右ボタンを押下するとカメラの撮像範囲が右に移動し、左ボタンを押下するとカメラの撮像範囲が左に移動し、上ボタンを押下するとカメラの撮像範囲が上に移動し、下ボタンを押下するとカメラの撮像範囲が下に移動するようなシステムが開発されている。
【0004】
【特許文献1】
特開平10−118015号公報
【0005】
【発明が解決しようとする課題】
しかし、術具の操作者は自分が操作するカメラが撮影した画像を注視しながら手術を行っている。このため、カメラの操作スイッチを目視して確認するまでもなく、どのような操作指示がカメラの操作スイッチを介してカメラになされているのか、つまり、カメラの操作に関して自分が実際にどのようなスイッチ操作を行っているのかを容易に確認することができれば大変都合がよい。また、このような内視鏡手術は、術具の操作者と何人もの医療スタッフとが協調して手術を行うが、術具の操作者の意思などが迅速に各医療スタッフに伝達されるようにできると大変都合がよい。
【0006】
そこで本発明は、上記を鑑み、カメラを用いた手術システムにおいて、カメラの操作が容易に確認でき、効率的かつ円滑な医療作業を実現することを目的として考えられたものである。
【0007】
【課題を解決するための手段】
本発明は、前記目的を達成するために創案されたものであり、術具を操作しつつスイッチを操作してカメラの撮像範囲の移動を行い、該カメラが撮影した画面を見ながら行う手術に用いられる画面表示装置における画像表示方法であって、前記スイッチにより撮像範囲を移動する操作を行うと、移動方向に対応した方向指示を画面上に表示し、前記スイッチにより該カメラが撮影した画像を拡大・縮小する操作を行うと、前記拡大・縮小に対応した拡大又は縮小の指示を画面上に表示することを特徴とする。かかる方法によれば、操作者を含めた医療スタッフは、カメラからの撮影画面より、操作指示を直接参照できる。その他の解決手段については、以下の実施形態で詳細に説明するものとする。
【0008】
【発明の実施の形態】
以下に、本実施形態のカメラを用いた手術システムにおける画像表示方法および手術支援装置を具現化した、医療用マニピュレータの操作用インタフェースにおける第1実施形態について、図面を参照して詳細に説明する。
【0009】
まず、本実施形態のカメラを用いた手術システムにおける画像表示方法および手術支援装置を具現化した、医療用マニピュレータの操作用インタフェースを含む医療用マニピュレータを用いた手術システムの構成について、図1〜図3を参照して説明する。
【0010】
図1に示すように、医療用マニピュレータを用いた手術システムは、人間がカメラを操作する代わりに、医療用マニピュレータを用いてカメラを操作する機能を有する。このため、医療用マニピュレータを用いた手術システムは、操作者の操作指示を入力する操作指示入力部10と、操作指示入力部10より入力された操作指示に基づいてマニピュレータ40を制御する制御部20と、制御部20より伝達された操作指示を提示する操作指示提示部30と、操作者の操作指示により操作されるマニピュレータ40と、マニピュレータ40により撮像方向(視野)が移動されるカメラである内視鏡50とを含んで構築されている。内視鏡50は、患者60の身体に開けられた挿入孔61に嵌挿されたトラカールTCを介して体内に挿通され、患者60の体内を撮影する。なお、制御部20は、請求項の「手術支援装置」に相当する。
【0011】
操作指示入力部10は、マニピュレータ40の操作者からの操作指示を入力する機能を有し、操作者が手術を行う際に用いる術具である鉗子11と、マニピュレータ40を用いて内視鏡50を操作するために入力する操作指示を受けて制御部20へと操作指示を伝送する術具スイッチ12とを有する。つまり、操作指示入力部10は、鉗子11に術具スイッチ12が取り付けられる構成である。なお、鉗子11は、内視鏡50用の挿入孔61とは異なる別の挿入孔に嵌挿された別のトラカール(図示外)を介して、患者60の体内に挿入される。ちなみに、術具スイッチ12は、請求項のスイッチに相当する。
【0012】
制御部20は、操作者からの操作指示を操作指示提示部30およびマニピュレータ40に中継する機能を有する。このため制御部20は、内視鏡50を体内への挿入孔61に固定するまでの、内視鏡50の大まかな位置を決めるために操作される手動操作ペンダントスイッチ21と、患者60の発作などの緊急時にマニピュレータ40の制御を停止する非常停止ペンダントスイッチ22と、術具スイッチ12、手動操作ペンダントスイッチ21、並びに非常停止ペンダントスイッチ22からの入力を受け、操作指示提示部30およびマニピュレータ40に中継するコントローラ23と、コントローラ23が正常に動作しているかを監視するコントローラ監視装置24とを有する。
【0013】
操作指示提示部30は、操作指示入力部10からの操作指示と内視鏡50からの撮影画像を医療作業者に提示する手段を有し、操作指示入力部10からの操作指示と内視鏡50からの撮影画像を1つの画像に合成するスーパーインポーザ31と、スーパーインポーザ31が合成した画面を医療作業者に提示するディスプレイ32とを有する。なお、操作指示入力部10、制御部20、並びに、操作指示提示部30は、本実施形態のカメラを用いた手術システムにおける画像表示方法および手術支援装置を具現化した、医療用マニピュレータの操作用インタフェースを構成する。
【0014】
マニピュレータ40は、人間に代わって内視鏡50を操作指示により操作する機能を有する。このため、マニピュレータ40は、図2に示すように、マニピュレータ40の高さを調整する昇降装置41と、モータなどの駆動手段により構成されるリンク駆動部42と、リンク駆動部42に接続され、リンク駆動部42の駆動に連動して形を変えるリンク部43と、リンク駆動部42の駆動を監視するエンコーダ44と、関節で接続されたアームで構成され、手動によって関節の角度を変化されることで形を変えるフレキシブルアーム45と、内視鏡50を把持する内視鏡ホルダ46と、内視鏡50のズーム部を回転させる内視鏡ホルダのモータ47とを有する。なお、フレキシブルアーム45は、一端をリンク部43と接続され、別の一端を内視鏡ホルダ46に接続されている。
【0015】
内視鏡50は、光学式かつズーム機能を有することで、患者の体内を撮影し、撮影画像をスーパーインポーザ31に送る機能を有し、その先端が、内視鏡固定具51により体内への挿入孔61に固定されている。内視鏡50の移動について、図3を参照して説明する。図3は、内視鏡50が、50Aの位置から50Bの位置に移動する様子を示す。内視鏡50の移動は、内視鏡固定具51を中心とした内視鏡50の回転運動(2次元方向の首振り運動)となる。それにより、内視鏡50と体内への挿入孔61との角度が変化することで、図3に示すように、内視鏡50の視野が変化する。この構成では、内視鏡50の先端は、内視鏡固定具51を中心にして曲面を描くように運動(2次元方向の首振り運動)する。体内の方向(奥行き方向)への運動は、安全を考慮したことにより、ズーム機能により仮想的に行うこととしている。
【0016】
次に図1〜図3、及び図5を参照しつつ、医療用マニピュレータの操作用インタフェースの動作を、図4に沿って説明する。図4は、医療用マニピュレータを用いた手術システムについて、時系列に、処理及び通信を説明したフローチャートである。
【0017】
まず、手術システムは、医療スタッフに、手術を行う前準備(S101)を行わせる。具体的には、手術システムは、医療スタッフに、内視鏡ホルダ46と内視鏡固定具51に内視鏡50を把持させ、鉗子11などの術具に術具スイッチ12を装着させる。これにより、手術システムは、術具スイッチ12の操作者に、内視鏡50の操作と同時に片手に術具としての鉗子11を、もう一方の片手に他の術具(ハサミなど)を用いた手術を行わせることが可能となる。
【0018】
次に、医療スタッフは、手術を行う際に、患者60の体内への挿入孔61に内視鏡50の先端を挿入して固定することで、内視鏡50の位置決めを行う(S102)。具体的には、まず、医療スタッフは、昇降装置41を手動操作ペンダントスイッチ21によって操作することで、マニピュレータ40の高さを調整する。次に、医療スタッフは、フレキシブルアーム45の関節を手動により調整することで、フレキシブルアーム45の形を決め、フレキシブルアーム45の先端である内視鏡ホルダ46に取り付けられた内視鏡50の位置を決める。そして、医療スタッフは、内視鏡50の先端を体内への挿入孔61に挿入し、内視鏡固定具51を用いて、体内への挿入孔61に内視鏡50を固定させる。以上で、体内への挿入孔61に内視鏡50を固定させる手順を説明した。体内への挿入孔61への内視鏡50の固定手順は、内視鏡50の位置を変更する度に、繰り返される。内視鏡50の位置を変更する契機は、例えば、仰向けから横向きなどの患者60の姿勢の移動、体内への挿入孔61について別の挿入孔への変更、並びに、リンク部43を操作させて得られる視野を超えた視野を確保すること、が挙げられる。
【0019】
そして、操作者は、術具スイッチ12を用いて、内視鏡50の操作を指示する(S103)。操作指示とは、例えば、視野の移動又はズームの変更である。さらに、術具スイッチ12からの操作指示を受信したコントローラ23は、受信した操作指示によりマニピュレータ40を制御するとともに、受信した操作指示を時系列に記憶する(S104)。記憶された操作指示は、随時参照可能である。なお、記憶された操作指示は、例えば、コントローラ23が有するボタンを連続して10回ON・OFFを繰り返すと、ディスプレイ32または他のコンピュータの画面に出力される。
【0020】
また、操作者が把持する術具スイッチ12は、鉗子11による手術作業により、向きが変わることがある。そこで、コントローラ23は、術具スイッチ12から操作指示を受信すると、予め設定された変換形式を参照して、操作指示をその変換形式に基づいて変換し、変換された操作指示によりマニピュレータ40を制御してもよい。これにより、操作者は、術具スイッチ12の向きによる影響を受けずに、術具スイッチ12から操作を指示できる。なお、コントローラ23に予め設定された変換形式は、請求項の「所定の変換形式」に相当する。以下、操作指示の内容ごとに(S105)動作を説明する。
【0021】
まず、内視鏡50の視野の移動(S106)について、図5を参照して説明する。術具スイッチ12が有する上下左右のボタンを押すと、押されたボタンに関する指示が術具スイッチ12からコントローラ23に伝達される。コントローラ23は、伝達された指示に対応してマニピュレータ40のリンク駆動部42を制御する。リンク駆動部42は、コントローラ23からの制御により、リンク部43と接続されている関節を回転させる。関節の回転によって、リンク部43は形を変形させ、リンク部43の先端に接続されているフレキシブルアーム45を通じて、内視鏡ホルダ46の位置が変化する。ここで、内視鏡ホルダ46に把持されている内視鏡50の先端近傍は内視鏡固定具51により固定されているので、内視鏡50は、内視鏡固定具51を中心とした回転運動(2次元方向の首振り運動)を行う。よって、回転運動(2次元方向の首振り運動)により、内視鏡50の視野が移動する(S106)。
【0022】
次に、内視鏡50のズームの変更(S107)について説明する。操作者が、術具スイッチ12が有するズーム変更を示す拡大または縮小のボタンを押すと、押されたボタンに関する指示が術具スイッチ12からコントローラ23に伝達される。コントローラ23は、伝達された指示により、内視鏡ホルダのモータ47を制御する。内視鏡ホルダのモータ47は、コントローラ23からの制御により、内視鏡50と接続されている接点を回転させる。接点の回転によって、内視鏡50のレンズの焦点は移動し、内視鏡50のズームは変更される(S107)。
【0023】
また、内視鏡50への操作指示が行われない場合は(S105、なし)、内視鏡50は固定されたままとなる。これにより、内視鏡50を前後方向(体内方向)に仮想的に移動することができる。つまり、撮像対象部位(手術野)の拡大撮影が可能になる。
【0024】
内視鏡50は、視野の移動又はズームの変更により、操作者の所望の撮影画像をスーパーインポーザ31に出力する(S108)。また、コントローラ23は、術具スイッチ12からの操作指示を画像化して、スーパーインポーザ31に出力する。スーパーインポーザ31は、入力された内視鏡50の撮影画像と、術具スイッチ12からの操作指示とを合成し(S109)、ディスプレイ32に出力する。ディスプレイ32は、スーパーインポーザ31から出力された画像を画面に表示する(S110)。なお、内視鏡の操作指示(S103)から画面の表示(S110)までの動作は、操作者が手術システムを停止させるまで繰り返される(S111、No)。以上、医療用マニピュレータの操作用インタフェースの動作を説明した。
【0025】
以上、本発明の第1実施形態について説明した。かかる方法によれば、カメラの操作者だけでなく、医療現場にいるスタッフが操作指示を把握できる。それにより、カメラの操作指示に対応した医療作業が容易に実行でき、医療現場にいるスタッフは医療作業を効率よく分担できる。また、操作指示の記録により、カメラの操作後に制御情報を参照することができる。その結果、制御情報の追跡をすることで、医療作業後の制御情報の入力が確認できる。さらに、操作者は、カメラの操作手段の向きに依存しない、容易な操作を実現できる。
【0026】
以下に、本実施形態のカメラを用いた手術システムにおける画像表示方法および手術支援装置を具現化した、医療用マニピュレータの操作用インタフェースにおける第2実施形態について説明する。第2実施形態は、上記第1実施形態において、起こりうる緊急の事態とその対処法を行う動作を付加するもので、医療用マニピュレータを用いた手術システムの構成要素および正常時の動作は第1実施形態と同様とする。従って、第1実施形態と同様の構成要素および動作については、同じ符号を付して説明を省略する。
【0027】
以下、図1〜図4を参照して説明する。まず、手術を行う前準備(S101)として、第1実施形態で述べた準備に加えて、手術システムは、コントローラ23に、内視鏡50を操作するのに用いられるマニピュレータ40が操作可能かを、例えば、コントローラ23が点検用の制御信号を送信することにより点検させる。制御信号を受信する点検対象は、術具スイッチ12、リンク駆動部42、内視鏡ホルダのモータ47、並びに、エンコーダ44である。なお、エンコーダ44は、リンク駆動部42の不具合を発見する手段として使用され、リンク駆動部42と一体構造になっている(図2および図3参照)。これにより、手術システムは、例えば、リンク駆動部42がコントローラ23からの制御指示を受け付けないなどの動作不良を、操作者に手術前に知らせることができる。なお、上記の点検は、コントローラ23の電源投入時又は操作者がコントローラ23に点検を指示する時を契機として行われる。ここで、手術システムが動作不良を操作者に知らせる一例を示す。手術システムは、電源を入れて動作可能になるまでの間に自己診断を実施しており、その時点で不具合が発見されると動作を中断する。また、手術システムは、動作中にも手術システムを構成する装置の状況を常時監視するステータスモニターが作動しているため、この時に不具合が発見されると、手術システムは停止する。これら、不具合発見時にはディスプレイ32にアラーム情報として、文字が表示される。
【0028】
次に、手術を行う際に、コントローラ23が何らかの不都合により、暴走動作に陥る場合も考えられる(S106またはS107の動作不良)。その場合、患者への影響を最小限に抑えるため、コントローラ23は、外部からの指示により、緊急に停止する機能を有する。そして、コントローラ監視装置24は、コントローラ23の暴走動作を監視し、暴走動作を検知したことを契機に、コントローラ23を停止させる。なお、コントローラ監視装置24は、コントローラ23の監視を定期的に行うために、ある一定時間毎に相互で通信を行う。この通信が途切れた時点で、コントローラ監視装置24は、装置の故障、ハングアップ等の不正動作が発生したことが分かる。
【0029】
さらに、手術中に、患者60の発作などにより、内視鏡50への操作を緊急に停止させる必要がある場合も考えられる(S103の操作指示の停止)。その場合、コントローラ23は、非常停止ペンダントスイッチ22が押されたのを契機に、マニピュレータ40の動作である、昇降装置41、リンク駆動部42、並びに、内視鏡ホルダのモータ47の動作を、術具スイッチ12及び手動操作ペンダントスイッチ21からの動作指示に係らず、電源供給を遮断して緊急に停止する。そして、患者60の発作などの緊急事態が収まったら、コントローラ23の電源を再起動することで、緊急停止を解除できる。なお、緊急時に、リンク駆動部42は固定される。
【0030】
また、術具スイッチ12の操作者は、術具スイッチ12の操作と並行して鉗子11を用いて手術を行うので、マニピュレータ40の可動範囲を超えた術具スイッチ12の操作を行ってしまうことも考えられる(S103の操作指示のミス)。その場合、コントローラ23は、マニピュレータ40の可動範囲を監視し、可動範囲を超えた場合に、ブザーなどの警告を発するとともに、手動操作ペンダントスイッチ21又は術具スイッチ12からの操作指示に係らず、マニピュレータ40への制御を停止する。なお、コントローラ23は、エンコーダ44を用いて、リンク駆動部42のモータの回転を監視する。コントローラ23は、リンク部43の可動範囲を超える動作が指示された場合又は運転中に出力軸が拘束された場合を、エンコーダ44などにより検知すると、ブザーなどの警告を発し、緊急停止する。
【0031】
以上、本発明の第2実施形態について説明した。かかる方法によれば、操作者は、コントローラ23による可動範囲を超えた操作を警告する機能により、カメラの操作中にカメラの可動範囲を知ることができる。また、操作者は、手術システムの点検機能により、医療作業前に確実にカメラを制御できる。さらに、医療スタッフは、コントローラ23の緊急に停止する機能により、手術の状況に応じ、柔軟に手術システムを使用できる。
【0032】
以下に、本実施形態のカメラを用いた手術システムにおける画像表示方法および手術支援装置を具現化した、医療用マニピュレータの操作用インタフェースにおける第3実施形態について説明する。第3実施形態は、上記第1実施形態において、ディスプレイ32に表示される画像内容をより具体的に説明するものである。従って、医療用マニピュレータを用いた手術システムの構成要素および正常時の動作は第1実施形態と同様とし、第1実施形態と同様の構成要素および動作については、同じ符号を付して説明を省略する。
【0033】
図6にディスプレイ32に出力される(S110)表示画面を示す。表示画面100は、内視鏡50により撮影された内視鏡画像110が、画面中央に表示されている。表示画面100では、術具スイッチ12からの操作指示が行われていないので、内視鏡画像110のみの表示となる。
【0034】
次に、術具スイッチ12から視野の移動を指示する場合の表示画面を図7に示す。表示画面100Aは、視野を左に移動する指示を行っている間に表示される。中央に配置されている内視鏡画像110に加えて、視野を左に移動する指示を示す指示印120Aが、内視鏡画像110の左に配置されている。これにより、操作者が視野を左に移動していることを、操作者を含めた医療スタッフが確認できる。また、視野を右に移動する指示については、表示画面100Bにおいて、視野を右に移動する指示を示す指示印120Bを内視鏡画像110の右に表示させることで、操作者が視野を右に移動していることを、操作者を含めた医療スタッフが確認できる。さらに、表示画面100Cは、横方向の視野移動と縦方向の視野移動とが同時に指示された場合に表示される。例えば、右と上とが同時に指示されると、右上に移動することを示す指示印120Cが、内視鏡画像110の右上に配置される。同様にして、指示印120Dは右下への視野移動を、指示印120Eは左上への視野移動を、並びに、指示印120Fは左下への視野移動をそれぞれ示す。
【0035】
そして、術具スイッチ12からズームの変更を指示する場合の表示画面を図8に示す。表示画面100Dは、拡大のズーム操作を行っている間に表示される。中央に配置されている内視鏡画像110に加えて、内視鏡画像110の左右両脇に、拡大する指示を示す指示印120Gが配置されている。指示印120Gは、内視鏡画像110の中心の方向を指すことにより、操作者が拡大のズーム操作を行っていることを、操作者を含めた医療スタッフが確認できる。また、表示画面100Eは、縮小のズーム操作を行っている間に表示される。中央に配置されている内視鏡画像110に加えて、内視鏡画像110の左右両脇に、縮小する指示を示す指示印120Hが配置されている。指示印120Hは、内視鏡画像110から外側の方向を指すことにより、操作者が縮小のズーム操作を行っていることを、操作者を含めた医療スタッフが確認できる。
【0036】
また、マニピュレータ40の警告を通知する表示画面を図9に示す。ここで警告とは、例えば、可動範囲を超えた術具スイッチ12の操作が行われた際に、その旨を警告することである。表示画面100は、内視鏡画像110に加え、警告の内容130を表示する。これにより、医療スタッフは、表示画面100から警告の内容130を知ることができ、警告の内容130に応じた適切な処置をすばやく行うことが可能となる。
【0037】
以上、本発明の第3実施形態について説明した。かかる方法によれば、操作者を含めた医療スタッフは、カメラからの撮影画面より、操作指示を直接参照できる。その結果、撮影画面と操作指示を容易にかつすばやく比較することが可能となる。また、操作者は、カメラの操作中にカメラの可動範囲を知ることができる。
【0038】
なお、図10に本実施形態のカメラを用いた手術システムにおける機能ブロック図を示す。本機能ブロック図は、カメラを用いた手術システムの構成要素と、その構成要素によって実現される各機能との包含関係を示している。
【0039】
まず、術具スイッチ12が実現する機能は、リンク部43の動作を入力するリンク部動作機能、および、内視鏡50の動作を入力する内視鏡動作機能である。
【0040】
次に、手動操作ペンダントスイッチ21が実現する機能は、昇降装置41の動作を入力する昇降装置動作機能、リンク部43を手動で可動させることを許可するリンク部手動可動機能、ならびに、リンク部43を原点に移動するリンク部原点移動機能である。さらに、非常停止ペンダントスイッチ22が実現する機能は、非常時に本実施形態のカメラを用いた手術システムを停止させる非常停止入力機能である。
【0041】
そして、制御部20および操作指示提示部30が実現する機能は、カメラの制御情報を伝達する昇降装置、リンク駆動装置の昇降、リンク動作制御機能、カメラの制御情報のログを記録するログデータ記録機能、操作指示を提示する情報提示機能、コントローラ23の不良状態を監視するH/W状態監視機能、緊急使用時の動作不良を未然に防ぐための定期的な動作点検に使用するDiag機能、ならびに、本実施形態のカメラを用いた手術システムの電源を投入する際に手術システムの動作を確認する始業前点検機能である。
【0042】
さらに、マニピュレータ40および内視鏡固定具51が実現する機能は、昇降装置41の位置を決める昇降位置決め機能、リンク部43を動作させるためにリンク駆動部42が動作するリンク部動作機能、フレキシブルアーム45が内視鏡50を把持する内視鏡保持機能、ならびに、フレキシブルアーム45が内視鏡50の位置を決める内視鏡位置決め機能である。
【0043】
以上説明した本発明は、発明の趣旨を逸脱しない範囲で広く変形実施することができる。
【0044】
例えば、内視鏡50に操作を指示するための入力手段として、鉗子11に取り付けられた術具スイッチ12を用いたが、鉗子11以外の術具に術具スイッチ12を取り付けてもよく、また、予め術具スイッチ12を備え付けてある任意の術具を用いてもよい。さらに、術具ではなく、操作者の体の一部にスイッチを取り付け、操作者の体の動きにより、操作指示を与える形式としてもよい。
【0045】
また、操作者の操作指示による内視鏡50の視野移動及びズームの速度について、操作が指示された時間に一定の速度でも、可変の速度でもよい。可変の速度とは、例えば、内視鏡50の急な移動により患者の体内に接触することを防ぐために、操作指示が行われてから一定時間は速度を遅くし、一定時間が過ぎた後は、速度を早める、などである。
【0046】
さらに、操作者の操作指示により操作者の所望の映像を写す手段として、マニピュレータ40によって視野移動及びズームの変更を行う内視鏡50を用いたが、操作者が操作するスイッチから、内視鏡50に視野移動及びズームの変更を行う機能を、内視鏡50にもたせてもよいし、内視鏡50以外の撮影手段を用いてもよい。
【0047】
また、ディスプレイ32において表示される内視鏡画像110と内視鏡50への指示印及び警告内容について、同一の画面に表示する形式を用いたが、別々の画面に表示してもよい。また、特定の内視鏡50への指示印及び警告内容について、画面で表示するかわりに、発光装置による光で表示し、指示内容または警告内容ごとに光の色をかえてもよい。また、画面で表示するかわりに、指示内容または警告内容ごとに、特定の音またはメロディを発するようにしてもよい。
【0048】
さらに、ディスプレイ32において表示される内視鏡画像110と内視鏡50への指示印及び警告内容について、移動方向並びに拡大または縮小の動作を、四角形を用いて表現したが、文字表示など他の手段を用いて表現してもよい。また、警告内容について、文字表示により表現したが、記号など他の表現手段を用いて表現してもよい。ここで、文字表示とは、例えば、移動方向の上下左右に対応して、漢字表記(上・下・左・右)または英語の頭文字表記(U・D・L・R)である。
【0049】
また、内視鏡50に操作を指示するための入力パラメータとして、視野の移動及びズームの変更を例示したが、内視鏡50の視野に十分な明るさを確保するための光源を内視鏡50が与える場合の光の量など、他のパラメータを含めてもよい。
【0050】
さらに、マニピュレータ40によって内視鏡50のズームを変更することで、内視鏡画像110を拡大・縮小する形式を用いたが、操作者の操作指示により内視鏡画像110を画像処理などの他の手段を用いて拡大・縮小してもよい。
【0051】
また、コントローラ23が正常に動作しているかを監視するコントローラ監視装置24は、コントローラ23とは別の装置として構成したが、コントローラ監視装置24の機能をソフトウェアとして、コントローラ23の内部に組み込んでもよい。
【0052】
【発明の効果】
本発明により、操作者を含めた医療スタッフは、カメラからの撮影画面より、操作指示を直接参照できる。その結果、撮影画面と操作指示を容易にかつすばやく比較することが可能となる。よって、効率的かつ安全な手術を行うことができる。
【図面の簡単な説明】
【図1】本発明の実施形態に係る医療用マニピュレータの操作用インタフェースを含む医療用マニピュレータを用いた手術システムの概略構成図である。
【図2】本発明の実施形態に係る医療用マニピュレータの構成図である。
【図3】本発明の実施形態に係る医療用マニピュレータの移動を示す構成図である。
【図4】本発明の実施形態に係る医療用マニピュレータの操作用インタフェースの動作を示すフローチャートである。
【図5】本発明の実施形態に係る医療用マニピュレータのリンク部の移動を示す構成図である。
【図6】本発明の第3実施形態であるディスプレイの表示画面である。
【図7】本発明の第3実施形態であるディスプレイの表示画面において、視野の移動指示を表示する画面図である。
【図8】本発明の第3実施形態であるディスプレイの表示画面において、ズームの変更指示を表示する画面図である。
【図9】本発明の第3実施形態であるディスプレイの表示画面において、警告を表示する画面図である。
【図10】本発明の実施形態に係る医療用マニピュレータを用いた手術システムの機能ブロック図である。
【符号の説明】
10…操作指示入力部
12…術具スイッチ
20…制御部
23…コントローラ
30…操作指示提示部
31…スーパーインポーザ
32…ディスプレイ
40…マニピュレータ
50…内視鏡
60…患者
Claims (8)
- 術具を操作しつつスイッチを操作してカメラの撮像範囲の移動を行い、該カメラが撮影した画面を見ながら行う手術に用いられる画面表示装置における画像表示方法であって、前記スイッチにより撮像範囲を移動する操作を行うと、移動方向に対応した方向指示を画面上に表示し、前記スイッチにより該カメラが撮影した画像を拡大・縮小する操作を行うと、前記拡大・縮小に対応した拡大又は縮小の指示を画面上に表示することを特徴とするカメラを用いた手術システムにおける画像表示方法。
- 前記画面表示方法は、前記スイッチによるカメラへの操作指示と、前記カメラからの撮影画面とを合成して提示することを特徴とする請求項1に記載のカメラを用いた手術システムにおける画像表示方法。
- 前記画面表示方法は、前記カメラの動作に関するエラー表示を含めて撮影画面に提示することを特徴とする請求項1または請求項2に記載のカメラを用いた手術システムにおける画像表示方法。
- 術具を操作しつつスイッチを操作してカメラの撮像範囲の移動を行い、該カメラが撮影した画面を見ながら行う手術に用いられる手術支援装置において、前記手術支援装置は、前記カメラへの操作指示を時系列に記録し、記録された前記操作指示を参照可能とする手段を備えることを特徴とするカメラを用いた手術システムにおける手術支援装置。
- 前記手術支援装置は、前記カメラの操作指示を所定の変換形式に従って変換し、変換された前記操作指示を用いてカメラを操作する手段を備えることを特徴とする請求項4に記載のカメラを用いた手術システムにおける手術支援装置。
- 前記手術支援装置は、前記カメラの動作を監視し、動作の可動範囲を超えた場合に前記画面に可動範囲を超えたことを提示させる手段を備えることを特徴とする請求項4または請求項5に記載のカメラを用いた手術システムにおける手術支援装置。
- 前記手術支援装置は、カメラが制御可能かを点検する手段を備えることを特徴とする請求項4ないし請求項6のいずれか1項に記載のカメラを用いた手術システムにおける手術支援装置。
- 前記手術支援装置は、前記スイッチからの操作指示に係わりなく、前記カメラへの制御を停止する非常停止機能を含む手段を備えることを特徴とする請求項4ないし請求項7のいずれか1項に記載のカメラを用いた手術システムにおける手術支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002273652A JP2004105539A (ja) | 2002-09-19 | 2002-09-19 | カメラを用いた手術システムにおける画像表示方法および手術支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002273652A JP2004105539A (ja) | 2002-09-19 | 2002-09-19 | カメラを用いた手術システムにおける画像表示方法および手術支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004105539A true JP2004105539A (ja) | 2004-04-08 |
Family
ID=32270357
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002273652A Withdrawn JP2004105539A (ja) | 2002-09-19 | 2002-09-19 | カメラを用いた手術システムにおける画像表示方法および手術支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004105539A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004105533A (ja) * | 2002-09-19 | 2004-04-08 | Olympus Corp | 内視鏡外科システム |
| JP2006325940A (ja) * | 2005-05-26 | 2006-12-07 | Olympus Medical Systems Corp | 手術装置 |
| WO2011118074A1 (ja) * | 2010-03-23 | 2011-09-29 | オリンパス株式会社 | 医療用マニピュレータシステム |
| JP2011206180A (ja) * | 2010-03-29 | 2011-10-20 | Olympus Corp | 操作入力装置およびマニピュレータシステム |
| CN101753817B (zh) * | 2008-12-17 | 2012-09-26 | 索尼株式会社 | 成像设备、图像处理设备和缩放控制方法 |
| JP7026988B1 (ja) * | 2020-10-27 | 2022-03-01 | リバーフィールド株式会社 | 手術支援装置 |
| CN115697178A (zh) * | 2020-10-27 | 2023-02-03 | 瑞德医疗机器股份有限公司 | 手术支援装置 |
-
2002
- 2002-09-19 JP JP2002273652A patent/JP2004105539A/ja not_active Withdrawn
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004105533A (ja) * | 2002-09-19 | 2004-04-08 | Olympus Corp | 内視鏡外科システム |
| JP2006325940A (ja) * | 2005-05-26 | 2006-12-07 | Olympus Medical Systems Corp | 手術装置 |
| CN101753817B (zh) * | 2008-12-17 | 2012-09-26 | 索尼株式会社 | 成像设备、图像处理设备和缩放控制方法 |
| CN102802553A (zh) * | 2010-03-23 | 2012-11-28 | 奥林巴斯株式会社 | 医疗用机械手系统 |
| JP2011194163A (ja) * | 2010-03-23 | 2011-10-06 | Olympus Corp | 医療用マニピュレータシステム |
| WO2011118074A1 (ja) * | 2010-03-23 | 2011-09-29 | オリンパス株式会社 | 医療用マニピュレータシステム |
| EP2550926A1 (en) * | 2010-03-23 | 2013-01-30 | Olympus Corporation | Medical manipulator system |
| EP2550926A4 (en) * | 2010-03-23 | 2014-04-16 | Olympus Corp | MEDICAL HANDLING SYSTEM |
| CN102802553B (zh) * | 2010-03-23 | 2015-08-05 | 奥林巴斯株式会社 | 医疗用机械手系统 |
| JP2011206180A (ja) * | 2010-03-29 | 2011-10-20 | Olympus Corp | 操作入力装置およびマニピュレータシステム |
| US8681095B2 (en) | 2010-03-29 | 2014-03-25 | Olympus Corporation | Operation input unit and manipulator system |
| JP7026988B1 (ja) * | 2020-10-27 | 2022-03-01 | リバーフィールド株式会社 | 手術支援装置 |
| WO2022091209A1 (ja) * | 2020-10-27 | 2022-05-05 | リバーフィールド株式会社 | 手術支援装置 |
| CN115697178A (zh) * | 2020-10-27 | 2023-02-03 | 瑞德医疗机器股份有限公司 | 手术支援装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3834768B1 (en) | Augmented reality headset with varied opacity for navigated robotic surgery | |
| AU2022252697B2 (en) | Methods and systems for providing assistance to a user of a surgical robot system | |
| KR102363661B1 (ko) | 원격동작 의료 시스템 내의 기구의 화면외 표시를 위한 시스템 및 방법 | |
| JP3938700B2 (ja) | 電動湾曲内視鏡装置 | |
| JP5160025B2 (ja) | 手術システム | |
| WO2017187795A1 (ja) | 制御装置、制御方法及び手術システム | |
| JP2009148859A (ja) | マニピュレータシステム及びマニピュレータの制御方法 | |
| JP5313271B2 (ja) | 内視鏡ビデオシステム | |
| JP2009056164A (ja) | 医療用マニピュレータシステム | |
| JP2005111080A (ja) | 手術支援システム | |
| US11653826B2 (en) | Medical observation system, control method, and program in which illumination light is controlled in accordance with a usage state of an image sensor | |
| JP2021129984A (ja) | 予定の器具アタッチメントの仮想モデルの表示により物理的器具アタッチメントの正しい選択を確実にする | |
| WO2018100828A1 (ja) | 顕微鏡装置及び制御方法 | |
| JP2019042412A5 (ja) | ||
| JP2004105539A (ja) | カメラを用いた手術システムにおける画像表示方法および手術支援装置 | |
| US20200015655A1 (en) | Medical observation apparatus and observation visual field correction method | |
| US8770756B2 (en) | Ophthalmic apparatus | |
| JP2003325436A (ja) | 内視鏡手術装置 | |
| JP2001275931A (ja) | 医療システム | |
| US20200170731A1 (en) | Systems and methods for point of interaction displays in a teleoperational assembly | |
| JP4398339B2 (ja) | 頭部装着用照明器具 | |
| JP5800609B2 (ja) | 医療用マスタスレーブマニピュレータ | |
| JP4436495B2 (ja) | 手術用観察システム | |
| JP7405136B2 (ja) | ケーブル、報知方法 | |
| JP2000185022A (ja) | Mri装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040302 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060210 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20060210 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20061219 |