EP4226903A2 - Krankenstuhl, insbesondere für den transport eines patienten zu einem rettungs- oder krankentransportwagen und raupenantrieb für einen derartigen krankenstuhl - Google Patents
Krankenstuhl, insbesondere für den transport eines patienten zu einem rettungs- oder krankentransportwagen und raupenantrieb für einen derartigen krankenstuhl Download PDFInfo
- Publication number
- EP4226903A2 EP4226903A2 EP23156883.3A EP23156883A EP4226903A2 EP 4226903 A2 EP4226903 A2 EP 4226903A2 EP 23156883 A EP23156883 A EP 23156883A EP 4226903 A2 EP4226903 A2 EP 4226903A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- drive
- chair
- crawler
- tracks
- caterpillar
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/04—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/06—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs with obstacle mounting facilities, e.g. for climbing stairs, kerbs or steps
- A61G5/061—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs with obstacle mounting facilities, e.g. for climbing stairs, kerbs or steps for climbing stairs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/06—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs with obstacle mounting facilities, e.g. for climbing stairs, kerbs or steps
- A61G5/066—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs with obstacle mounting facilities, e.g. for climbing stairs, kerbs or steps with endless belts
Definitions
- the invention relates to a sick chair which is preferably used for transporting a patient to an ambulance or ambulance, and a caterpillar drive for a movable sick chair, i.e. for a foldable or non-foldable carrying chair, in particular for transporting a patient to a rescue or ambulance ambulance.
- stretchers are also used. These have a foldable or non-foldable frame with a seat, a backrest and legs that are provided with castors and/or castors. Modules with a caterpillar drive exist for transporting patients on such hospital chairs over steps and in particular stairs. Such a sick chair is out, for example WO 2021/138175 A1 known.
- the caterpillar drives of the known hospital chairs have a drive module that is provided with two caterpillar drives.
- Each crawler track has two deflection ends and a crawler belt loop, which is guided around the deflection ends and can be driven in a rotating manner.
- a drive ensures synchronous movement of the crawler belt loops of both crawler tracks.
- the drive module can usually be pivoted from a rest position into a drive position. In the rest position, the drive module is located substantially at the back of the chair back, while in the drive position it is pivoted away from the chair back. When it is tilted backwards, the patient chair can then be moved over the stairs, with the two caterpillar tracks extending over a distance that corresponds at least to the distance between two or three stair nosings, the usual dimensions.
- the object of the invention is to provide a crawler-driven hospital chair and a crawler drive for a hospital chair which improves the maneuverability of the hospital chair.
- the drive module of the caterpillar drive of the hospital chair according to the invention has a drive unit, by means of which the two caterpillar drives can be controlled differently together or independently of one another.
- the control unit provided for this purpose is in communication with an operating device with manually operable operating elements for entering commands for the control unit.
- the caterpillar tracks can be driven either at the same speed or at different speeds in the same and/or in the opposite direction by means of the drive unit controlled by the control unit, so that the wheelchair can be driven when driving over, for example, a step or several steps of a staircase (but also when driving on a level) is steerable.
- a step or several steps of a staircase but also when driving on a level
- the drive unit has e.g. Alternatively, the drive unit has a (single) motor that drives both crawler belt slings via a gearbox with two output shafts, whereby the two output shafts can be driven at the same speed or at different speeds in the same way by controlling the gearbox, which can be a differential gearbox, for example direction or in opposite directions.
- the gearbox which can be a differential gearbox, for example direction or in opposite directions.
- the operating device is typically arranged at the upper end of the backrest, which backrest can be extendable in its upper part.
- the operating device is thus in an operating position that is comfortable for the paramedic.
- the communication link between the operating device and the control unit can be wireless or wired.
- the drive module typically also has an energy supply in the form of batteries or accumulators.
- the drive module can be moved between a rest position, in which the drive module is pivoted towards the back of the chair backrest and the crawler belt loops of the two crawler tracks are aligned essentially parallel to the height extension of the chair backrest, and a drive position , in which the drive module is pivoted away from the backrest of the chair and in which the rollers of the Frame of the chair facing lower deflection ends of the caterpillar tracks have a small distance to the frame than the opposite upper deflection ends of the caterpillar tracks, so that the lower deflection ends of the caterpillar tracks "pushes up" the sick chair on its legs located below the backrest.
- the lower deflection ends of the crawler tracks are positioned above the contact surfaces of the castors of the chair in the rest position of the drive module and below the contact surfaces of the castors of the chair in the drive position.
- the drive module In its drive position, the drive module therefore lifts the wheelchair at its rear end so that the rear rollers are free and the drive can take place via the lower deflection ends of the caterpillar tracks for fast straight-line travel or for reverse maneuvering over ramps, for example of an ambulance or ambulance.
- the patient chair has a type of floor drive. Due to the possibility of being able to drive the two caterpillar belt slings in opposite directions, the patient chair can now be turned on the spot.
- the operating device has two manually adjustable operating elements for selecting the drive speed and direction of the two crawler tracks, whereby when both operating elements are actuated for forward travel, the starting movement and speed are controlled by the control unit is controlled with a time delay and so that both crawler tracks start up synchronously.
- slide switches or so-called thumb joysticks are suitable as control elements for the separate control of both drive motors.
- one of the two operating elements is automatically activated with a time delay and a synchronized activation of both caterpillar drives, so that the hospital chair is moved forwards or backwards, for example in a straight line. Then can then through accordingly different actuation of the controls to set different speeds maneuvering in curves or when reversing.
- a logic circuit is used to synchronize the drives of both crawler tracks.
- both control elements are not actuated exactly at the same time for straight-ahead driving.
- the logic circuit initially receives a signal via the control element actuated first, but relays this only with a time delay to the drive of the caterpillar drive associated with this first control element. If the logic circuit does not receive a signal from the second operating element within the delay time, after the delay time has elapsed, the caterpillar drive associated with the first operating element begins to be driven.
- the logic circuit receives a signal from the other second control element within the delay time, it forwards both to the drive control of both crawler tracks, which are therefore driven simultaneously and synchronously, which ensures a "soft" start, preferably controlled via a "speed ramp”. , cares.
- the hospital chair is only to be provided with the caterpillar drive when this is necessary. In this way can then the hospital chair can be used both without and with a caterpillar drive.
- the drive module of the caterpillar drive can therefore be removed from the frame.
- this cable must then be disconnected. This can be done by automatically pluggable and detachable plug connections.
- a wireless communication connection between the operating device and the control unit is primarily also suitable for this case.
- the caterpillar drive has a rechargeable energy supply unit for supplying the drive unit, the control unit and the operating device with electrical energy, the control unit and the operating device being connected to one another by means of a power supply cable for supplying the operating device with electrical energy from the Power supply unit are connected, and that the power supply cable can be connected with its connection end for the operating device to an external power source for charging the power supply unit of the caterpillar drive.
- the caterpillar drive has an energy supply unit which is provided for supplying the drive unit, its control unit and the operating device with electrical energy.
- a power supply cable extends from the control unit to the operating device.
- the operating device is supplied with electrical energy from the energy supply unit, so to speak, by means of the control unit, which in turn is connected to the energy supply unit. This situation occurs when driving or when using the caterpillar drive for other purposes.
- the connecting end of the power supply cable is removed from the operating device and connected to the vehicle electrical system.
- said power supply cable is used to charge the rechargeable Energy supply unit from the vehicle electrical system.
- the external energy source can of course also be other types of energy sources, such as the energy supply network.
- the communication link between the control unit and the operating device is wireless or wired. If a wired communication connection is desired, the corresponding communication lines can be part of the power supply cable.
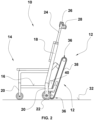
- the hospital chair 10 has a frame 14 which is provided with a seat surface 16, a backrest 18 and legs 20 on which running and/or steering rollers 22 are located.
- the backrest 18 can be pulled out and has a telescoping bracket 24 on which there is an operating device 26 with two operating elements 28 in the form of, for example, two rotary or sliding switches or thumb joysticks.
- the drive module 12 with a caterpillar drive 30 is located on the back of the backrest 18.
- the drive module 12 is pivotably or tiltably attached to the frame 14 of the hospital chair 10 and is located in 2 in its resting position. In this rest position, the caterpillar drive 30 has no contact with the ground 32.
- the crawler drive 30 has two crawler tracks 34, each with two deflection ends 36 (see 2 ) and a crawler belt loop 38 guided around it.
- the crawler belt loop 38 can be designed as a preferably ribbed belt (toothed belt) or in the form of a chain.
- the drive module 12 has a drive unit 39 for driving the crawler tracks 34 either at the same speed or at different speeds in the same direction or in different directions.
- the drive unit 39 has its own drive motor 40 for each crawler track unit 34, with an electronic control unit 42 being provided for controlling both motors.
- Operating device 26 is in communication with this control unit 42 (in 3 indicated by the dashed line 44).
- the drive module 12 also has an energy supply unit 46 in the form of a battery or an accumulator.
- a typical use for the drive module with hospital chair 10 is in 1 shown.
- the crawler tracks 34 which can be controlled manually by means of the operating elements 28, can drive their track belt loops 38 in the same direction at different speeds and in opposite directions. This can be based on the operational situation 1 the patient chair 10 can also be maneuvered along a curved staircase, i.e. along a staircase with a "curve".
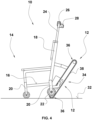
- the caterpillar drive 30 can be used as a floor drive in that the lower deflection ends 36 of the two caterpillar drives 34 are located below the rear running and/or steering rollers 22 of the patient chair 10, i.e. the chair is raised at the rear when the drive module 12 is in its drive position .
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Accommodation For Nursing Or Treatment Tables (AREA)
- Invalid Beds And Related Equipment (AREA)
Abstract
Description
- Die Erfindung betrifft einen Krankenstuhl, der vorzugsweise für den Transport eines Patienten zu einem Rettungs- oder Krankentransportwagen eingesetzt wird, und einen Raupenantrieb für einen verfahrbaren Krankenstuhl, d.h. für einen klappbaren oder nicht klappbaren Tragesessel, für insbesondere den Transport eines Patienten zu einem Rettungs- oder Krankentransportwagen.
- Neben dem Transport von Patienten mittels Krankentragen und Fahrgeräten sind auch Tragesessel im Einsatz. Diese weisen ein klappbares oder nicht klappbares Gestell mit einer Sitzfläche, einer Lehne und mit Beinen auf, die mit Lauf- und/oder Lenkrollen versehen sind. Für den Transport von Patienten auf derartigen Krankenstühlen über Stufen und insbesondere Treppen existieren Module mit einem Raupenantrieb. Ein derartiger Krankenstuhl ist beispielsweise aus
WO 2021/138175 A1 bekannt. - Die Raupenantriebe der bekannten Krankenstühle weisen ein Antriebsmodul auf, das mit zwei Raupenlaufwerken versehen ist. Jedes Raupenlaufwerk weist zwei Umlenkenden und eine Raupenbandschlinge auf, die um die Umlenkenden herum geführt und umlaufend antreibbar sind. Ein Antrieb sorgt für eine synchrone Bewegung der Raupenbandschlingen beider Raupenlaufwerke. Für den Transport über eine Treppe kann das Antriebsmodul im Regelfall aus einer Ruheposition in eine Antriebsposition verschwenkt werden. In der Ruheposition befindet sich das Antriebsmodul im Wesentlichen an der Rückseite der Stuhllehne, während es in der Antriebsposition von der Stuhllehne weggeschwenkt ist. Im nach hinten geneigtem Zustand lässt sich dann der Krankenstuhl über die Treppe verfahren, wobei sich die beiden Raupenlaufwerke über eine Distanz erstrecken sollten, die mindestens dem Abstand zweier oder dreier Treppenstufenkanten übliche Abmessung entspricht.
- Derartige Raupenantriebe für Krankenstühle haben sich grundsätzlich bewährt. Die Manövrierbarkeit der bekannten Krankenstühle beim Einsatz ihrer Raupenantriebe ist allerdings relativ eingeschränkt.
- Aufgabe der Erfindung ist es, einen Krankenstuhl mit Raupenantrieb sowie einen Raupenantrieb für eine Krankenstuhl zu schaffen, durch den die Manövrierbarkeit des Krankenstuhls verbessert ist.
- Zur Lösung dieser Aufgabe wird mit der Erfindung ein Krankenstuhl, insbesondere für den Transport eines Patienten zu einem Rettungs- oder Krankentransportwagen vorgeschlagen, wobei der Krankenstuhl versehen ist mit
- einem Stuhl, der ein Gestell mit einer Sitzfläche, einer Lehne und mit Beinen aufweist, die mit Lauf- und/oder Lenkrollen versehen sind, und
- einem Raupenantrieb für das Überfahren einer oder mehrerer Stufen, z.B. einer Treppe mit dem Stuhl,
- wobei der Raupenantrieb versehen ist mit
- einem an dem Gestell es Stuhls angeordneten Antriebsmodul, das zwei Raupenlaufwerke mit Umlenkenden und einer um die Umlenkenden umlaufend antreibbaren Raupenbandschlinge aufweist,
- einer Antriebseinheit für die beiden Raupenlaufwerke,
- einer Ansteuereinheit zum Ansteuern der Antriebseinheit und
- einer mit der Ansteuereinheit in Kommunikationsverbindung stehenden Bedienvorrichtung mit manuell betätigbaren Bedienelementen für die Eingabe von Befehlen für die Ansteuereinheit,
- wobei durch Betätigung der Bedienelemente die Raupenlaufwerke mittels der von der Ansteuereinheit angesteuerten Antriebseinheit wahlweise unterschiedlich schnell in gleicher und/oder in entgegengesetzter Richtung antreibbar sind und damit der Stuhl beim Überfahren z.B. einer Stufe oder mehrerer Stufen einer Treppe lenkbar ist.
- Das Antriebsmodul des Raupenantriebs des erfindungsgemäßen Krankenstuhls weist eine Antriebseinheit auf, mittels der die beiden Raupenlaufwerke gemeinsam oder unabhängig voneinander unterschiedlich ansteuerbar sind.. Die hierfür vorgesehene Ansteuereinheit steht in Kommunikationsverbindung mit einer Bedienvorrichtung mit manuell betätigbaren Bedienelementen für die Eingabe von Befehlen für die Ansteuereinheit. Durch Betätigung der Bedienelemente können die Raupenlaufwerke mittels der von der Ansteuereinheit eingesteuerten Antriebseinheit wahlweise gleich oder unterschiedlich schnell in gleicher und/oder in entgegengesetzter Richtung angetrieben werden, womit der Krankenstuhl beim Überfahren z.B. einer Stufe oder mehrerer Stufen einer Treppe (aber auch beim Befahren auf einer Ebene) lenkbar ist. Dadurch ist es nun möglich, den Krankenstuhl auch bei Treppenkurven, also bei geschwungenen Treppen, einzusetzen.
- Die Antriebseinheit weist z.B. zwei Antriebsmotore auf, die ggfs. über jeweils ein Getriebe die Raupenbandschlingen der beiden Raupenlaufwerke antreiben. Alternativ weist die Antriebseinheit einen (einzigen) Motor auf, der über ein Getriebe mit zwei Abtriebswellen beide Raupenbandschlingen antreibt, wobei sich durch Ansteuerung des Getriebes, bei dem es sich z.B. um ein Differenzialgetriebe handeln kann, die beiden Abtriebswellen gleich schnell oder unterschiedlich schnell in gleicher Richtung oder in entgegengesetzten Richtungen bewegen lassen.
- Die Bedienvorrichtung ist typischerweise am oberen Ende der Rückenlehne angeordnet, wobei diese Rückenlehne in ihrem oberen Teil ausziehbar sein kann. Damit befindet sich die Bedienvorrichtung in einer für den Sanitäter angenehmen Bedienposition. Die Kommunikationsverbindung zwischen Bedienvorrichtung und Ansteuereinheit kann drahtlos oder drahtgebunden erfolgen. Das Antriebsmodul verfügt neben den beiden Raupenlaufwerken und der Ansteuereinheit typischerweise auch noch über eine Energieversorgung in Form von Batterien oder Akkumulatoren.
- Wie bereits oben erwähnt, lässt sich das Antriebsmodul zwischen einer Ruheposition, in der das Antriebsmodul in Richtung auf die Rückseite der Lehne des Stuhls geschwenkt ist und die Raupenbandschlingen der beiden Raupenlaufwerke im Wesentlichen parallel zur Höhenerstreckung der Lehne des Stuhls ausgerichtet sind, und einer Antriebsposition bewegen, in der das Antriebsmodul von der Lehne des Stuhls weggeschwenkt ist und in der die den Rollen des Gestells des Stuhls zugewandten unteren Umlenkenden der Raupenlaufwerke einen geringen Abstand zu dem Gestell aufweisen als die gegenüberliegenden oberen Umlenkenden der Raupenlaufwerke, so dass die unteren Umlenkenden der Raupenlaufwerke den Krankenstuhl an seinen unterhalb der Lehne befindlichen Beinen "hochdrückt".
- Bei dem zuvor beschriebenen Merkmal einer vorteilhaften Ausgestaltung der Erfindung kann ferner vorgesehen sein, dass die unteren Umlenkenden der Raupenlaufwerke in der Ruheposition des Antriebsmoduls oberhalb von Aufstandsflächen der Rollen des Stuhls und in der Antriebsposition unterhalb der Aufstandsflächen der Rollen des Stuhls positioniert sind. Das Antriebsmodul hebt also in seiner Antriebsposition den Krankenstuhl an seinem hinteren Ende an, so dass die hinteren Laufrollen frei sind und der Antrieb über die unteren Umlenkenden der Raupenlaufwerke für einen schnellen Geradeauslauf oder für Rückwärtsmanövrierungen über Rampen beispielsweise eines Rettungs- oder Krankentransportwagens erfolgen kann. Der Krankenstuhl verfügt also bei dieser Ausgestaltung des Antriebsmoduls und seines Zusammenwirkens mit dem Krankenstuhl über eine Art Bodenantrieb. Aufgrund der Möglichkeit, die beiden Raupenbandschlingen in entgegengesetzten Richtungen antrieben zu können, lässt sich nun der Krankenstuhl auf der Stelle drehen.
- In weiterer zweckmäßiger Ausgestaltung der Erfindung kann vorgesehen sein, dass die Bedienvorrichtung zwei manuell verstellbare Bedienelemente für die Wahl der Antriebsgeschwindigkeit und -richtung der beiden Raupenlaufwerke aufweist, wobei dann, wenn beide Bedienelemente für eine Vorwärtsfahrt betätigt sind, die Anfahrbewegung und -geschwindigkeit durch die Ansteuereinheit zeitverzögert gesteuert erfolgt und damit beide Raupenlaufwerke synchronisiert anlaufen. Als Bedienelemente eignen sich beispielsweise Schiebeschalter oder sogenannte Daumenjoysticks für die getrennte Ansteuerung beider Antriebsmotoren. Zur Erleichterung des Anfahrens des Krankenstuhls erfolgt automatisch nach einer anfänglichen Bedienung zunächst eines der beiden Bedienelemente zeitverzögert eine synchronisierte Ansteuerung beider Raupenlaufwerke, so dass der Krankenstuhl z.B. im Geradeauslauf vorwärts bzw. rückwärts verfahren wird. Anschließend kann dann durch entsprechend unterschiedliche Betätigung der Bedienelemente zur Einstellung unterschiedlicher Geschwindigkeiten die Manövrierung in Kurven oder beim Rückwärtsfahren erfolgen.
- Für die Synchronisation des Antriebs beider Raupenlaufwerke wird z.B. eine Logikschaltung eingesetzt. In der Praxis kann der Fall eintreten, dass für einen Geradeauslauf beide Bedienelemente nicht exakt gleichzeitig betätigt werden. Die Logikschaltung erhält zunächst über das als erstes betätigte Bedienelement ein Signal, gibt dies aber nur zeitverzögert an den Antrieb des diesem ersten Bedienelement zugeordneten Raupenlaufwerk weiter. Empfängt die Logikschaltung innerhalb der Verzögerungszeit kein Signal von dem zweiten Bedienelement, beginnt nach Ablauf der Verzögerungszeit der Antrieb des dem ersten Bedienelement zugeordneten Raupenlaufwerk. Empfängt hingegen die Logikschaltung innerhalb der Verzögerungszeit ein Signal von dem anderen zweiten Bedienelement, so leitet sie beide weiter an die Antriebssteuerung beider Raupenlaufwerke, die somit gleichzeitig und damit synchron angetrieben werden, was für einen "sanften" Anlauf, vorzugsweise über eine "Geschwindigkeitsrampe" gesteuert, sorgt.
- Hinsichtlich der Handhabung des Krankenstuhls bei Kurvenfahrten ist es zweckmäßig, die (maximale) Geschwindigkeit, die z.B. bei einem Geradeauslauf gegeben ist, gegebenenfalls automatisch zu reduzieren.
- Hinsichtlich der Manövrierung beim Rückwärtsfahren ist es von Vorteil, dass dafür gesorgt wird, dass dann, wenn nur eines der beiden Bedienelemente für die Vorwärtsfahrt betätigt ist oder wenn beide Bedienelemente für entgegengesetzte Bewegungen der Raupenbandschlingen der beiden Raupenlaufwerke betätigt sind oder wenn beide Bedienelemente für eine Rückwärtsfahrt betätigt sind, durch die Ansteuereinheit die Antriebsgeschwindigkeit der beiden Raupenlaufwerke auf einen niedrigeren Wert begrenzt ist, als bei einer Vorwärtsfahrt.
- Es ist ferner zweckmäßig, wenn der Krankenstuhl nur dann mit dem Raupenantrieb zu versehen ist, wenn dies erforderlich ist. Auf diese Weise kann dann der Krankenstuhl sowohl ohne als auch Raupenantrieb eingesetzt werden. Das Antriebsmodul des Raupenantriebs ist also vom Gestell abnehmbar. Bei einer kabelgebundenen Kommunikationsverbindung zwischen Bedienvorrichtung und Ansteuereinheit muss dieses Kabel dann getrennt werden. Dies kann durch automatisch zusammensteckbare und lösbare Steckerverbindungen erfolgen. Alternativ bietet sich für diesen Fall aber vornehmlich auch eine drahtlose Kommunikationsverbindung zwischen Bedienvorrichtung und Ansteuereinheit an.
- In weiterer zweckmäßiger Ausgestaltung der Erfindung ist vorgesehen, dass der Raupenantrieb eine wiederaufladbare Energieversorgungseinheit für die Versorgung der Antriebseinheit, der Ansteuereinheit und der Bedienvorrichtung mit elektrischer Energie aufweist, wobei die Ansteuereinheit und die Bedienvorrichtung miteinander mittels eines Energieversorgungskabels zur Versorgung der Bedienvorrichtung mit elektrischer Energie aus der Energieversorgungseinheit verbunden sind, und dass das Energieversorgungskabel mit seinem Anschlussende für die Bedienvorrichtung an einer externen Energiequelle zum Laden der Energieversorgungseinheit des Raupenantriebs anschließbar ist.
- In dieser Ausgestaltung der Erfindung weist der Raupenantrieb eine Energieversorgungseinheit auf, die zur Versorgung der Antriebseinheit, ihrer Ansteuereinheit und der Bedienvorrichtung mit elektrischer Energie vorgesehen ist. Ausgehend von der Ansteuereinheit erstreckt sich dabei ein Energieversorgungskabel bis zur Bedienvorrichtung. Auf diese Art und Weise wird also die Bedienvorrichtung sozusagen vermittels der Ansteuereinheit, die ihrerseits mit der Energieversorgungseinheit verbunden ist, mit elektrischer Energie aus der Energieversorgungseinheit versorgt. Diese Situation ist im Fahrbetrieb bzw. bei anderweitiger Nutzung des Raupenantriebs gegeben.
- Befindet sich der Krankenstuhl beispielsweise in einem Krankentransportfahrzeug, so wird das Anschlussende des Energieversorgungskabels von der Bedienvorrichtung abgenommen und mit dem Bordnetz verbunden. Jetzt dient das besagte Energieversorgungskabel dem Aufladen der wiederaufladbaren Energieversorgungseinheit aus dem Bordnetz. Bei der externen Energiequelle kann es sich selbstverständlich auch um andere Arten von Energiequellen, wie beispielsweise dem Energieversorgungsnetz handeln.
- Die Kommunikationsverbindung zwischen der Ansteuereinheit und der Bedienvorrichtung erfolgt drahtlos oder drahtgebunden. Sofern eine drahtgebundene Kommunikationsverbindung gewünscht wird, können die entsprechenden Kommunikationsleitungen Bestandteil des Energieversorgungskabels sein.
- Zur Lösung der oben genannten Aufgabe dient erfindungsgemäß auch ein Raupenantrieb, der versehen ist mit
- einem an dem Krankenstuhl anbringbaren Antriebsmodul, das zwei Raupenlaufwerke mit Umlenkenden und einer um die Umlenkenden umlaufend antreibbaren Raupenbandschlinge aufweist,
- zwei Antriebsmotoren, von denen jeder die Raupenbandschlinge eines anderen der beiden Raupenlaufwerke antreibt,
- einer Ansteuereinheit zum Ansteuern der beiden Antriebsmotoren und
- einer mit der Ansteuereinheit in Kommunikationsverbindung stehenden Bedienvorrichtung mit manuell betätigbaren Bedienelementen für die Eingabe von Befehlen für die Ansteuereinheit,
- wobei durch Betätigung der Bedienelemente die Raupenlaufwerke mittels der Ansteuereinheit wahlweise unterschiedlich schnell in gleicher und/oder in entgegengesetzter Richtung antreibbar sind und damit der Stuhl beim Überfahren z.B. einer Stufe oder mehrerer Stufen einer Treppe lenkbar ist.
- Die Merkmale des erfindungsgemäßen Raupenantriebs sind bereits weiter oben detailliert beschrieben, und zwar auch für die verschiedenen Ausgestaltungen und Weiterbildungen des erfindungsgemäßen Raupenantriebs. Insoweit wird ferner auf die den Raupenantrieb abhängigen Unteransprüche der Anspruchsfassung verwiesen.
- Die Merkmale der Erfindung lassen sich wie folgt zusammenfassen:
- Der Krankenstuhl kann beispielsweise
- per z.B. Daumenjoystick auf der Stelle gedreht werden (Treppen, Plateau),
- neben einer ersten Bedienvorrichtung am oberen Ende der Rückenlehne eine zweite Bedienvorrichtung an den typischerweise vorhandenen fußseitigen Trage- und Bediengriffen des Krankenstuhls aufweist, wobei auch diese zweite Bedienvorrichtung bspw. per Daumenjoystick bedienbar ist und drahtgebunden oder drahtlos mit der Ansteuereinheit in Kommunikationsverbindung steht,
- auf geschwungenen Treppen verfahren werden und
- auf Kfz-Laderampen hoch- und herunter gefahren werden.
- Eine intelligente Steuerung erlaubt
- einen schnellen Geradeauslauf, wenn beide beispielsweise Daumenjoysticks in die gleiche Richtung gedrückt werden, wobei das Antriebsmodul mit Anfahrkurve/Synchronisation beider Raupenlaufwerke bis zur vollen Geschwindigkeit hochfährt, wobei die Anfahrkurve mit geringer Geschwindigkeit und die zeitliche Verzögerung bis zum Beginn der Beschleunigung auf die volle Geschwindigkeit das nicht gleichzeitige Drücken der Daumenjoysticks (Timing vom Sanitäter) ausgleichen,
- wenn nur ein Daumenjoystick gedrückt wird oder beide Daumenjoysticks in entgegengesetzter Richtung gedrückt werden, dass der Raupenantrieb mit langsamer Geschwindigkeit fährt, wobei dies das Rangieren/Manövrieren vorausschaubar und intuitiv gestaltet und damit das Unfallrisiko minimiert.
- Der komplette Raupenantrieb kann mittels eines vorzugsweise Schnellverschlusssystems einfach an den Krankenstuhl angedockt und von diesem getrennt werden, womit der Krankenstuhl wahlweise mit oder ohne Raupenantrieb einsetzbar ist.
- Die Erfindung wird nachfolgend anhand eines Ausführungsbeispiels und unter Bezugnahme auf die Zeichnung näher erläutert. Im Einzelnen zeigen dabei:
- Fig. 1
- in Seitenansicht die Situation, in der der Krankenstuhl bei in Antriebsposition befindlichem Raupenantrieb auf einer Treppe verfahren wird,
- Fig. 2
- eine Seitenansicht des Krankenstuhls mit in Ruheposition befindlichem Raupenantrieb,
- Fig. 3
- eine Ansicht auf den Krankenstuhl von seiner Rückseite und
- Fig. 4
- eine Seitenansicht des Krankenstuhls beim Verfahren über eine Ebene mit für den Bodenantrieb genutztem Raupenantrieb.
- Zwei Seitenansichten des Krankenstuhls 10 in den beiden möglichen Betriebszuständen des Antriebsmoduls 12 sind in den
Fign. 1 ,2 und4 gezeigt. GemäßFig. 2 weist der Krankenstuhl 10 ein Gestell 14 auf, das mit einer Sitzfläche 16, einer Lehne 18 und mit Beinen 20 versehen ist, an denen sich Lauf- und/oder Lenkrollen 22 befinden. Die Rückenlehne 18 ist ausziehbar und weist einen teleskopierbaren Bügel 24 auf, an dem sich eine Bedienvorrichtung 26 mit zwei Bedienelementen 28 in Form z.B. zweier Dreh- oder Schiebeschalter oder Daumen-Joysticks befindet. - An der Rückseite der Lehne 18 befindet sich das Antriebsmodul 12 mit einem Raupenantrieb 30. Das Antriebsmodul 12 ist schwenk- bzw. kippbar am Gestell 14 des Krankenstuhls 10 angebracht und befindet sich in
Fig. 2 in seiner Ruheposition. In dieser Ruheposition hat der Raupenantrieb 30 keinen Kontakt zum Untergrund 32. - Wie anhand von
Fig. 3 zu erkennen ist, weist der Raupenantrieb 30 zwei Raupenlaufwerke 34 auf, die jeweils zwei Umlenkenden 36 (sieheFig. 2 ) und eine um diese herumgeführte Raupenbandschlinge 38 aufweist. Die Raupenbandschlinge 38 kann als vorzugsweise geripptes Band (Zahnriemen) oder aber in Form einer Kette ausgeführt sein. - Das Antriebsmodul 12 weist eine Antriebseinheit 39 für den wahlweise gleich schnellen oder unterschiedlich schnellen Antrieb der Raupenlaufwerke 34 in gleicher Richtung oder in unterschiedlichen Richtungen auf. In diesem Ausführungsbeispiel weist die Antriebseinheit 39 für jedes Raupenlaufwerk 34 einen eigenen Antriebsmotor 40 auf, wobei zur Ansteuerung beider Motoren eine elektronische Ansteuereinheit 42 vorgesehen ist. Mit dieser Ansteuereinheit 42 steht die Bedienvorrichtung 26 in Kommunikationsverbindung (in
Fig. 3 durch die gestrichelte Linie 44 angedeutet). Das Antriebsmodul 12 weist ferner eine Energieversorgungseinheit 46 in Form einer Batterie oder eines Akkumulators auf. - Ein typischer Einsatz für das Antriebsmodul mit Krankenstuhl 10 ist in
Fig. 1 gezeigt. Durch die mittels der Bedienelemente 28 manuell steuerbaren Raupenlaufwerke 34 lassen sich deren Raupenbandschlingen 38 sowohl in gleicher Richtung unterschiedlich schnell als auch in entgegengesetzten Richtungen antreiben. Damit kann bezogen auf die Einsatzsituation derFig. 1 der Krankenstuhl 10 auch längs einer geschwungenen Treppe, also längs einer Treppe mit "Kurve" manövriert werden. Auf ebenem Untergrund (sieheFig. 4 ) kann der Raupenantrieb 30 als Bodenantrieb eingesetzt werden, indem die unteren Umlenkenden 36 der beiden Raupenlaufwerke 34 sich unterhalb der hinteren Lauf- und/oder Lenkrollen 22 des Krankenstuhls 10 befinden, dieser also hinten angehoben ist, wenn das Antriebsmodul 12 sich in seiner Antriebsposition befindet. -
- 10 Krankenstuhl
- 12 Antriebsmodul
- 14 Gestell
- 16 Sitzfläche
- 18 Rückenlehne
- 20 Beine
- 22 Lauf- und/oder Lenkrollen
- 24 Bügel
- 26 Bedienvorrichtung
- 28 Bedienelement
- 30 Raupenantrieb
- 32 Untergrund
- 34 Raupenlaufwerke
- 36 Umlenkenden
- 38 Raupenbandschlinge
- 39 Antriebseinheit
- 40 Antriebsmotor
- 42 Ansteuereinheit
- 44 Kommunikationsverbindung
- 46 Energieversorgungseinheit
Claims (15)
- Krankenstuhl, insbesondere für den Transport eines Patienten zu einem Rettungs- oder Krankentransportwagen, mit- einem Stuhl (10), der ein Gestell (14) mit einer Sitzfläche (16), einer Lehne (18) und mit Beinen (20) aufweist, die mit Lauf- und/oder Lenkrollen (22) versehen sind, und- einem Raupenantrieb (30) für das Überfahren einer oder mehrerer Stufen, z.B. einer Treppe mit dem Stuhl (10),- wobei der Raupenantrieb (30) versehen ist mit- einem an dem Gestell (14) des Stuhls (10) angeordneten Antriebsmodul (12), das zwei Raupenlaufwerke (34) mit Umlenkenden (36) und einer um die Umlenkenden (36) umlaufend antreibbaren Raupenbandschlinge (38) aufweist,- einer Antriebseinheit (39) für die der beiden Raupenlaufwerke (34),- einer Ansteuereinheit (42) zum Ansteuern der Antriebseinheit (39) und- einer mit der Ansteuereinheit (42) in Kommunikationsverbindung stehenden Bedienvorrichtung (26) mit manuell betätigbaren Bedienelementen (28) für die Eingabe von Befehlen für die Ansteuereinheit (42),- wobei durch Betätigung der Bedienelemente (28) die Raupenlaufwerke (34) mittels der von der Ansteuereinheit (42) angesteuerten Antriebseinheit (39) wahlweise unterschiedlich schnell in gleicher und/oder in entgegengesetzter Richtung antreibbar sind und damit der Stuhl (10) beim Überfahren z.B. einer Stufe oder mehrerer Stufen einer Treppe lenkbar ist.
- Krankenstuhl nach Anspruch 1, dadurch gekennzeichnet, dass das Antriebsmodul (12) zwischen einer Ruheposition, in der das Antriebsmodul (12) in Richtung auf die Rückseite der Lehne (18) des Stuhls (10) geschwenkt ist und die Raupenbandschlingen (38) der beiden Raupenlaufwerke (34) im Wesentlichen parallel zur Höhenerstreckung der Lehne (18) des Stuhls (10) ausgerichtet sind, und einer Antriebsposition bewegbar ist, in der das Antriebsmodul (12) von der Lehne (18) des Stuhls (10) weggeschwenkt ist und in der die den Rollen (22) des Gestells (14) des Stuhls (10) zugewandten unteren Umlenkenden (36) der Raupenlaufwerke (34) einen geringen Abstand zu dem Gestell (14) aufweisen als die gegenüberliegenden oberen Umlenkenden (36) der Raupenlaufwerke (34), wobei die unteren Umlenkenden (36) der Raupenlaufwerke (34) in der Ruheposition des Antriebsmoduls (12) oberhalb von Aufstandsflächen der Rollen (22) des Stuhls (10) und in der Antriebsposition unterhalb der Aufstandsflächen der Rollen (22) des Stuhls (10) positioniert sind.
- Krankenstuhl nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die Bedienvorrichtung (26) zwei manuell verstellbare Bedienelemente für die Wahl der Antriebsgeschwindigkeit der beiden Raupenlaufwerke (34) aufweist, wobei dann, wenn von den beiden Bedienelementen (28) nur eines betätigt wird, das diesem Bedienelement (28) zugeordnete Raupenlaufwerk (34) erst nach Ablauf einer Verzögerungszeit ansteuerbar ist bzw. angesteuert wird, wobei dann, wenn innerhalb dieser Verzögerungszeit auch das andere Bedienelement (28) betätigt wird, mit Betätigung dieses anderen Bedienelements (28) beide Raupenlaufwerke (34) ansteuerbar sind bzw. angesteuert werden und damit beide Raupenlaufwerke (34) synchronisierbar sind.
- Krankenstuhl nach Anspruch 3, dadurch gekennzeichnet, dass dann, wenn nur eines der beiden Bedienelemente (28) für die Bewegung der Raupenbandschlinge (38) eines der beiden Raupenlaufwerke (34) betätigt ist oder wenn beide Bedienelemente (28) für die Bewegung der Raupenbandschlingen (38) beider Raupenlaufwerke (34) in entgegengesetzten Richtung betätigt sind, durch die Ansteuereinheit (42) die Antriebsgeschwindigkeit der beiden Raupenlaufwerke (34) auf einen niedrigeren Wert begrenzt ist, als bei einer Geradeausfahrt in Richtung vorwärts oder rückwärts.
- Krankenstuhl nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, dass das Antriebsmodul (12) vom Gestell (14) des Stuhls (10) abnehmbar oder fest am Gestell (14) des Stuhls (10) montiert ist.
- Krankenstuhl nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet,- dass die Antriebseinheit (39) zwei Antriebsmotoren (40) aufweist, von denen jeder zum Antreiben der Raupenbandschlinge (38) eines anderen der beiden Raupenlaufwerke (34) vorgesehen ist, wobei die beiden Antriebsmotoren (40) von der Ansteuereinheit (42) zum wahlweise unterschiedlich oder gleich schnellen Antreiben der Raupenbandschlingen (38) in gleicher Richtung oder in entgegengesetzten Richtungen ansteuerbar sind, oder- dass die Antriebseinheit (39) einen Antriebsmotor mit einem mit diesem gekoppelten Getriebe mit zwei Antriebsausgängen zum Antreiben der Raupenbandschlingen (38) jeweils eines anderen der beiden Raupenlaufwerke (34) vorgesehen ist, wobei das Getriebe von der Ansteuereinheit (42) zum wahlweise unterschiedlich oder gleich schnellen Antreiben der Raupenbandschlingen (38) in gleicher oder entgegengesetzter Richtung ansteuerbar ist.
- Krankenstuhl nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, dass die Bedienvorrichtung an der Lehne (18) des Gestells (14) des Stuhls (10) und/oder an mindestens einem von mehreren Tragegriffen angeordnet ist, die sich an den Beinen des Gestells (14) befinden.
- Krankenstuhl nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, dass der Raupenantrieb (30) eine wiederaufladbare Energieversorgungseinheit (46) für die Versorgung der Antriebseinheit (39), der Ansteuereinheit (42) und der Bedienvorrichtung (26) mit elektrischer Energie aufweist, wobei die Ansteuereinheit (42) und die Bedienvorrichtung (26) miteinander mittels eines Energieversorgungskabels zur Versorgung der Bedienvorrichtung (26) mit elektrischer Energie aus der Energieversorgungseinheit (46) verbunden sind, und dass das Energieversorgungskabel mit seinem Anschlussende für die Bedienvorrichtung (26) an einer externen Energiequelle zum Laden der Energieversorgungseinheit (46) des Raupenantriebs (30) anschließbar ist.
- Raupenantrieb für einen verfahrbaren Krankenstuhl für insbesondere den Transport eines Patienten zu einem Rettungs- oder Krankentransportwagen, mit- einem an dem Krankenstuhl (10) anbringbaren Antriebsmodul (12), das zwei Raupenlaufwerke (34) mit Umlenkenden(36) und einer um die Umlenkenden (36) umlaufend antreibbaren Raupenbandschlinge (38) aufweist,- einer Antriebseinheit (39) für die beiden Raupenlaufwerke (34),- einer Ansteuereinheit (42) zum Ansteuern der Antriebseinheit (39) und- einer mit der Ansteuereinheit (42) in Kommunikationsverbindung stehenden Bedienvorrichtung (26) mit manuell betätigbaren Bedienelementen (28) für die Eingabe von Befehlen für die Ansteuereinheit (42),- wobei durch Betätigung der Bedienelemente (28) die Raupenlaufwerke (34) mittels der von der Ansteuereinheit (42) angesteuerten Antriebseinheit (39) wahlweise unterschiedlich schnell in gleicher und/oder in entgegengesetzter Richtung antreibbar sind und damit der Stuhl (10) beim Überfahren z.B. einer Stufe oder mehrerer Stufen einer Treppe lenkbar ist.
- Raupenantrieb nach Anspruch 9, dadurch gekennzeichnet, dass das Antriebsmodul (12) zwischen einer Ruheposition, in der das Antriebsmodul (12) im an einem Krankenstuhl (10) angebrachten Zustand in Richtung auf die Rückseite einer Lehne (18) des Krankenstuhls (10) geschwenkt ist und die Raupenbandschlingen (38) der beiden Raupenlaufwerke (34) im Wesentlichen parallel zur Höhenerstreckung der Lehne (18) des Krankenstuhls (10) ausgerichtet sind, und einer Antriebsposition bewegbar ist, in der das Antriebsmodul (12) von der Lehne (18) des Krankenstuhls (10) weggeschwenkt ist und die den Rollen (22) des Gestells(14) des Krankenstuhls (10) zugewandten unteren Umlenkenden (36) der Raupenlaufwerke (34) einen geringen Abstand zu dem Gestell (14) aufweisen als die gegenüberliegenden oberen Umlenkenden (36) der Raupenlaufwerke (34), wobei die unteren Umlenkenden (36) der Raupenlaufwerke (34) in der Ruheposition des Antriebsmoduls (12) oberhalb von Aufstandsflächen von Rollen (22) des Krankenstuhls (10) und in der Antriebsposition unterhalb der Aufstandsflächen der Rollen (22) des Krankenstuhls (10) positioniert sind.
- Raupenantrieb nach Anspruch 9 oder 10, dadurch gekennzeichnet, dass die Bedienvorrichtung (26) zwei manuell verstellbare Bedienelemente (28) für die Wahl der Antriebsgeschwindigkeit der beiden Raupenlaufwerke (34) aufweist, wobei dann, wenn von den beiden Bedienelementen (28) nur eines betätigt wird, das diesem Bedienelement (28) zugeordnete Raupenlaufwerk (34) erst nach Ablauf einer Verzögerungszeit ansteuerbar ist bzw. angesteuert wird, wobei dann, wenn innerhalb dieser Verzögerungszeit auch das andere Bedienelement (28) betätigt wird, mit Betätigung dieses anderen Bedienelements (28) beide Raupenlaufwerke (34) ansteuerbar sind bzw. angesteuert werden und damit beide Raupenlaufwerke (34) synchronisierbar sind.
- Raupenantrieb nach Anspruch 11, dadurch gekennzeichnet, dass dann, wenn nur eines der beiden Bedienelemente (28) für die Bewegung der Raupenbandschlinge (38) eines der beiden Raupenlaufwerke (34) betätigt ist oder wenn beide Bedienelemente (28) für die Bewegung der Raupenbandschlingen (38) beider Raupenlaufwerke (34) in entgegengesetzten Richtung betätigt sind, durch die Ansteuereinheit (42) die Antriebsgeschwindigkeit der beiden Raupenlaufwerke (34) auf einen niedrigeren Wert begrenzt ist, als bei einer Geradeausfahrt in Richtung vorwärts oder rückwärts.
- Raupenantrieb nach einem der Ansprüche 9 bis 12, dadurch gekennzeichnet, dass das Antriebsmodul (12) an dem Krankenstuhl (10) abnehmbar anbringbar ist.
- Raupenantrieb nach einem der Ansprüche 9 bis 13, dadurch gekennzeichnet,- dass die Antriebseinheit (39) zwei Antriebsmotoren (40) aufweist, von denen jeder zum Antreiben der Raupenbandschlinge (38) eines anderen der beiden Raupenlaufwerke (34) vorgesehen ist, wobei die beiden Antriebsmotoren (40) von der Ansteuereinheit (42) zum wahlweise unterschiedlich oder gleich schnellen Antreiben der Raupenbandschlingen (38) in gleicher Richtung oder in entgegengesetzten Richtungen ansteuerbar sind, oder- dass die Antriebseinheit (39) einen Antriebsmotor mit einem mit diesem gekoppelten Getriebe mit zwei Antriebsausgängen zum Antreiben der Raupenbandschlingen (38) jeweils eines anderen der beiden Raupenlaufwerke (34) vorgesehen ist, wobei das Getriebe von der Ansteuereinheit (42) zum wahlweise unterschiedlich oder gleich schnellen Antreiben der Raupenbandschlingen (38) in gleicher oder entgegengesetzter Richtung ansteuerbar ist.
- Krankenstuhl nach einem der Ansprüche 9 bis 14, gekennzeichnet durch eine wiederaufladbare Energieversorgungseinheit (46) für die Versorgung der Antriebseinheit (39), der Ansteuereinheit (42) und der Bedienvorrichtung (26) mit elektrischer Energie, wobei die Ansteuereinheit (42) und die Bedienvorrichtung (26) miteinander mittels eines Energieversorgungskabels zur Versorgung der Bedienvorrichtung (26) mit elektrischer Energie aus der Energieversorgungseinheit (46) verbunden sind, und dass das Energieversorgungskabel mit seinem Anschlussende für die Bedienvorrichtung (26) an einer externen Energiequelle zum Laden der Energieversorgungseinheit (46) anschließbar ist.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE202022100835.3U DE202022100835U1 (de) | 2022-02-15 | 2022-02-15 | Krankenstuhl, insbesondere für den Transport eines Patienten zu einem Rettungs- oder Krankentransportwagen und Raupenantrieb für einen derartigen Krankenstuhl |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4226903A2 true EP4226903A2 (de) | 2023-08-16 |
| EP4226903A3 EP4226903A3 (de) | 2023-08-23 |
Family
ID=85251900
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23156883.3A Pending EP4226903A3 (de) | 2022-02-15 | 2023-02-15 | Krankenstuhl, insbesondere für den transport eines patienten zu einem rettungs- oder krankentransportwagen und raupenantrieb für einen derartigen krankenstuhl |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP4226903A3 (de) |
| DE (1) | DE202022100835U1 (de) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202024106265U1 (de) | 2023-10-31 | 2024-11-18 | Stollenwerk und Cie. Fabrik für Sanitätsausrüstungen Gesellschaft mit beschränkter Haftung | Transfersystem zur Überführung eines Patienten in einen und/oder aus einem Rettungs- oder Krankentransportwagen |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021138175A1 (en) | 2019-12-30 | 2021-07-08 | Stryker Corporation | Patient transport apparatus for traversing stairs |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8783392B2 (en) * | 2009-08-04 | 2014-07-22 | Freedom One Mobility Llc | Tracked mobility device |
| US11679045B2 (en) * | 2019-12-30 | 2023-06-20 | Stryker Corporation | Patient transport apparatus user interface |
-
2022
- 2022-02-15 DE DE202022100835.3U patent/DE202022100835U1/de active Active
-
2023
- 2023-02-15 EP EP23156883.3A patent/EP4226903A3/de active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021138175A1 (en) | 2019-12-30 | 2021-07-08 | Stryker Corporation | Patient transport apparatus for traversing stairs |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4226903A3 (de) | 2023-08-23 |
| DE202022100835U1 (de) | 2023-06-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AT393251B (de) | Mit einem rollstuhl kuppelbare raupentransportvorrichtung, insbesondere fuer das befahren von treppen | |
| DE19581724B4 (de) | Motorisierter Mehrrichtungs - Rollstuhl | |
| EP0146029B1 (de) | Treppengängiges Fahrzeug | |
| DE69713854T2 (de) | Treppensteigendes Fahrzeug zum Transport eines Rollstuhls und Verfahren zum Betreiben eines treppensteigenden Fahrzeugs | |
| DE68904115T2 (de) | Autonomer modul fuer die intensivpflege und reanimation. | |
| DE2317111C3 (de) | Transportvorrichtung zum Verlagern von Gegenständen | |
| EP2163231A2 (de) | Treppensteigvorrichtung | |
| EP3801427B1 (de) | Selbstbalancierendes fahrzeug | |
| EP1970037A1 (de) | Fahrzeug für den Transport eines Rollstuhl | |
| DE2726919A1 (de) | Ueberfuehrungseinrichtung | |
| DE2625045B1 (de) | Aufrichtstuhl | |
| DE102012110756A1 (de) | Transportwagen zum Transport einer Patientenlagerfläche und/oder einer Operationstischsäule eines Operationstischs | |
| EP1301249B1 (de) | Sport- und transportgerät | |
| EP1878416A2 (de) | Zusatzantriebsvorrichtung für manuelle Rollstühle | |
| EP4226903A2 (de) | Krankenstuhl, insbesondere für den transport eines patienten zu einem rettungs- oder krankentransportwagen und raupenantrieb für einen derartigen krankenstuhl | |
| EP0903138B1 (de) | Rollstuhl | |
| DE3827607C2 (de) | ||
| DE102023103710A1 (de) | Krankenstuhl, insbesondere für den Transport eines Patienten zu einem Rettungs- oder Krankentransportwagen und Raupenantrieb für einen derartigen Krankenstuhl | |
| DE2915715C2 (de) | Zusatzgerät für einen Schwerbehinderten-Lifter | |
| DE3200157A1 (de) | "rollstuhl-zuggeraet" | |
| DE3820339A1 (de) | Rollstuhl-einstieg im bereich des fahrerplatzes von fahrzeugen zur personenbefoerderung, insbesondere linienbusse | |
| DE202010008734U1 (de) | Raupenwagen | |
| EP0082307A1 (de) | Behindertenfahrzeug | |
| WO2005099646A1 (de) | Treppensteiger zum selbststeigen, adaptierbar an handrollstühlen | |
| DE19748877C2 (de) | Elektrischer Rollstuhlantrieb mit Vorrichtungen für Treppensteigen zum Anbau an Rollstühle normaler Bauart |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: A61G 5/06 20060101ALI20230717BHEP Ipc: A61G 5/04 20130101AFI20230717BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20240222 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |