EP4144919B1 - Verfahren und baumaschine zur bodenverdichtung - Google Patents
Verfahren und baumaschine zur bodenverdichtung Download PDFInfo
- Publication number
- EP4144919B1 EP4144919B1 EP22204100.6A EP22204100A EP4144919B1 EP 4144919 B1 EP4144919 B1 EP 4144919B1 EP 22204100 A EP22204100 A EP 22204100A EP 4144919 B1 EP4144919 B1 EP 4144919B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- support cable
- winch
- cable
- winch drum
- compacting element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/46—Position indicators for suspended loads or for crane elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/28—Other constructional details
- B66D1/40—Control devices
- B66D1/48—Control devices automatic
- B66D1/485—Control devices automatic electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/28—Other constructional details
- B66D1/40—Control devices
- B66D1/48—Control devices automatic
- B66D1/50—Control devices automatic for maintaining predetermined rope, cable, or chain tension, e.g. in ropes or cables for towing craft, in chains for anchors; Warping or mooring winch-cable tension control
- B66D1/505—Control devices automatic for maintaining predetermined rope, cable, or chain tension, e.g. in ropes or cables for towing craft, in chains for anchors; Warping or mooring winch-cable tension control electrical
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D3/00—Improving or preserving soil or rock, e.g. preserving permafrost soil
- E02D3/02—Improving by compacting
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D3/00—Improving or preserving soil or rock, e.g. preserving permafrost soil
- E02D3/02—Improving by compacting
- E02D3/046—Improving by compacting by tamping or vibrating, e.g. with auxiliary watering of the soil
Definitions
- the invention relates to a method for soil compaction with a construction machine, wherein a support cable is guided along a mast, the support cable is wound up and unwound by means of a rotatably mounted winch drum of a cable winch, the winch drum is driven in rotation by means of a winch drive and a compaction element is arranged on the support cable, which is moved vertically by the support cable, wherein the support cable is unwound from the winch drum of the cable winch and the compaction element is lowered from a position above a ground surface on the support cable to the ground surface, wherein the compaction element strikes the ground surface and compacts the soil, according to the preamble of claim 1.
- the invention further relates to a construction machine for soil compaction with a mast, a support cable which is guided along the mast, a cable winch with a rotatably mounted winch drum to which the support cable is attached for winding and unwinding, a winch drive for rotating the winch drum, a compaction element which is attached to the support cable for vertical movement, and a control unit by which the cable winch can be operated to unwind the support cable from the winch drum, wherein the compaction element on the support cable is lowered to a ground surface and the compaction element strikes the ground surface to compact the soil, according to the preamble of claim 11.
- a generic construction machine comes from the EP 3 708 528 A1 out.
- Such a disordered rope winding on the winch drum can lead to damage to the winch drum and in particular to increased wear of the suspension rope. This can not only significantly shorten the service life of the suspension rope, but can also affect the maximum load capacity of the suspension rope overall.
- the EP 3 708 528 A1 A rope pressure device with at least one pressure element must be provided in the area of the winch drum. This can reliably prevent the rope vibration of the support rope from spreading to the rope area wound on the winch drum.
- the rope pressure device means additional construction work and requires a corresponding amount of space on the construction machine. The rope pressure device also requires maintenance at certain intervals.
- the invention is based on the object of specifying a method and a construction machine for soil compaction, with which the negative effects of a rope vibration of the support rope on the rope winding on the winch drum can be counteracted particularly efficiently.
- the object is achieved by initially briefly tensioning the support cable in the area of the winch after the compaction element has hit the ground and then automatically unwinding the support cable from the winch drum by a certain amount by the control unit before the compaction element is lifted from the ground again.
- the support cable is wound up again immediately afterwards.
- this method it is intended to counteract incorrect winding of the support cable on the winch drum by first briefly tensioning the support cable in the area of the winch without lifting the compaction element from the ground. Then, before lifting the compaction element from the ground, the support cable thus tensioned is automatically unwound and relaxed by the control unit by a certain amount, whereby any offset of the winding on the winch drum that may have occurred is removed again by unwinding.
- the support cable can then be automatically wound up again by the control unit and the compaction element can be lifted off the ground until the compaction element reaches the desired starting position above the ground for another compaction process.
- This method according to the invention ensures that even if an offset occurs on the cable winding, this is automatically and reliably eliminated by the control unit and thus no permanent incorrect winding of the support cable can form on the winch drum. This also reliably counteracts cable wear.
- the amount or the extent of unwinding the support cable before the compaction element is raised again by winding up the support cable can be adjusted in any suitable manner. According to a further development of the invention, it is particularly advantageous that the support cable is unwound until the support cable is correctly wound on the winch drum. This This ensures clean winding and thus low wear of the suspension cable in the long term.
- the winding can be observed directly by a machine operator from an operator's cabin.
- a clean cable winding can also be ensured with any arrangement of the winch drum according to a further development of the invention by detecting a winding of the support cable on the winch drum using a sensor unit, in particular a camera unit or a radar unit or another suitable sensor.
- the image from the camera unit can be displayed to a machine operator in the machine cabin. Detection can be optical, contactless via energy waves, tactile, electronic, magnetic, by reed contact or in another suitable manner.
- the sensor unit can be connected to the control unit, which uses signals or data recorded by the sensor unit to determine whether the winch drum is correctly wound.
- the signal or data can in particular be an image.
- the recorded sensor signal for the rope winding is evaluated electronically, for example using image processing software.
- the machine operator or the control unit can individually set an amount or a measure of the unwinding of the supporting rope until the rope is correctly wound on the winch drum.
- the amount of unwinding can be specified as a rotation angle measurement for the winch drum or a length measurement for the supporting rope or a time period for controlling the winch drive (at a defined speed).
- the amount of unwinding of the support cable is automatically set by the control unit or by a machine operator before a new lifting process of the compaction element.
- the amount can be constant or variable.
- a further development of the method according to the invention for soil compaction is characterized in that the winch drum is decoupled from the winch drive via a coupling device when the support cable is unwound, that the winch drive is driven in a direction of rotation to wind up the support cable before the compaction element hits the ground surface, and that after the compaction element hits the ground surface, the coupling device couples the winch drum to the winch drive which is already rotating.
- the method is based on the knowledge that insufficient tension of the support cable in the area of the winch caused by a cable vibration can lead to cable windings on the winch drum jumping out of their intended position.
- the winch drive is decoupled from the winch drum via a coupling device when the support cable is unwound in a period of time before the compaction element hits the ground.
- the movement of the winch drum is thus independent of the movement of the winch drive. This independence can be used to operate the winch drive early in a direction of rotation that is required for winding up the support cable.
- the coupling device can be used to reconnect or couple the winch drum to the winch drive, particularly immediately after the compaction element hits the ground, whereby the torque of the winch drive on the drive shaft can have a direct effect on the winch drum and a resulting abruptly starting rotational movement of the winch drum in the direction of winding up the support cable leads to very rapid cable tension in the area of the winch.
- a winding force can be applied to the support cable via the winch drum immediately after or when the compaction element hits the ground, so that it is immediately tensioned again in the area of the winch. Due to this immediate cable tension, the formation of slack in the area of the winch and the associated jumping of cable windings on the winch drum from their intended position is prevented. This significantly reduces the risk of unwanted misalignment of rope windings on the winch drum.
- the support cable can in principle be connected directly to the compaction element.
- a chain and/or a steel cable suspension is arranged as a buffer between the support cable and the compaction element. This can prevent the support cable from being compressed by standing on the compaction element when braking.
- at least one additional weight for example in the form of a steel crossbeam, can optionally be arranged between the support cable and the steel cable suspension.
- the method for soil compaction can be carried out manually by a machine operator.
- the method is carried out automatically by means of a control unit.
- the control unit can in particular be connected to the winch drive and the coupling device and actuate them accordingly.
- the control unit can also be connected to one or more sensors by which a position of the compaction element and/or the cable tension is detected.
- the coupling device can be designed as a lockable freewheel clutch, whereby locking or unlocking can be effected by the control unit.
- the coupling device can basically be designed in any suitable way. According to a further development of the invention, it is particularly expedient for the coupling device to comprise a free-fall brake, whereby the support cable is unwound in a free fall of the compaction element. With a free-fall brake, after the brake is opened, the winch drum can be driven with little friction solely by the weight of the compaction element attached to the support cable, whereby the compaction element can hit the ground surface in free fall, so to speak. During this free fall, a certain minimum tensile stress is present on the support cable.
- a free-fall or free-running mode can be ended electronically or by corresponding mechanical components when the cable hits the ground surface and the tension in the cable is reduced as a result, whereby coupling, i.e. the creation of a torque-transmitting connection, between the winch drive and the winch drum.
- the free-fall brake which can be part of the coupling device or form the entire device, can be connected to the control unit, which can basically comprise an electronic computer unit.
- the coupling device can be activated at any time.
- a preferred method variant of the invention consists in the coupling device carrying out a coupling when the compaction element reaches the ground surface. This ensures that, on the one hand, the compaction element achieves the freest possible falling movement and, on the other hand, immediately after impact with the ground, torque is transmitted from the winch drive to the winch drum to generate the desired cable tension of the support cable in the area of the winch.
- any torque can be set for any period of time on the winch drive.
- the winch drive generates a tightening torque when coupling, which tightens the support cable in the area of the winch.
- the tightening torque can preferably be designed so that it leads to a desired cable tension, but the compaction element is not lifted from the ground. A second, higher torque can then be set for lifting.
- control unit is provided which is designed to carry out one of the previously described methods for soil compaction.
- the control unit can in particular be an electronic control unit and in particular can be integrated into an existing control unit of a construction machine.
- the winch drum can also be arranged directly on the mast and in particular in an upper area of the mast. According to a further development of the invention, it is particularly expedient for the support cable to be attached to the upper end of the mast.
- the winch drum and the winch drive can thus be provided directly or close to a carrier device, so that the construction machine as a whole has the lowest possible center of gravity.
- the carrier device can in particular have an undercarriage with an upper carriage mounted rotatably thereon.
- the undercarriage can in particular comprise a chassis, in particular a crawler chassis.
- At least one sensor unit in particular a camera unit, a radar unit or an ultrasound or another suitable sensor, is arranged in the region of the winch drum for detecting a winding of the support cable on the winch drum.
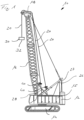
- a construction machine 10 designed as a crawler crane from Fig.1 has a mobile carrier device 12.
- the carrier device 12 comprises a crawler chassis 14 on which an upper carriage 15 is rotatably mounted.
- a mast 16 which is also referred to as a boom arm, is mounted on the upper carriage 15 so as to be pivotable about a horizontal pivot axis.
- a support beam 26, a support beam 28 and an adjusting cable mechanism 27 are provided on the upper carriage 15 in a basically known manner.
- At least one support cable 20 is guided from the upper carriage 15 via a mast head 18 of the mast 16, on which a compaction element 30 is suspended, which in the illustrated embodiment is designed as an impact weight 32 for soil compaction.
- the support cable 20 is adjustably driven via a double winch arrangement in the upper carriage 15, as is basically known from the prior art.
- a cable pressure device 40 can be arranged on each of the two sections of the support cable 20, one of which is attached to the support beam 26, also called an A-frame, and the other to the mast 16.
- the ends of the support cable 20 are each attached to a cable winch in the upper carriage 15, so that a double cable winch arrangement is provided for fast lifting processes.
- a control unit can be provided on the upper carriage 15, in particular in a cabin.
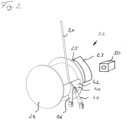
- a possible arrangement of a cable winch 22 for the construction machine 10 according to the invention is shown.
- the cable winch 22 has a winch drum 24 for winding and unwinding the support cable 20.
- the winch drum 24 can be driven in rotation in basically both directions of rotation via a winch drive 23 (only partially shown) via an intermediate coupling device 25.
- the coupling device 25 can be designed as a lockable freewheel clutch or a so-called free fall brake, whereby the support cable 20 is unwound in free fall, so to speak, solely via the weight of the compaction element 30.
- the coupling device 25 can immediately establish a rotationally fixed connection between the winch drive 23 and the winch drum 24.
- the winch drive 23 is driven in a winding direction, clockwise in the illustrated embodiment, preferably via the control unit before reconnection by the coupling device 25.
- a tightening torque of the winch drive 23 is applied to the winch drum 24.
- a desired tension of the support cable 20 can be achieved in the area of the cable winch 22.
- a clean winding of the support cable 20 on the winch drum 24 can be monitored by a camera unit 50 as a sensor unit.
- a radar unit, ultrasound or another suitable sensor such as an optical sensor, a magnetic sensor or a reed contact can also be used.
- the support cable 20 can be unwound by a machine operator or preferably automatically via the control unit if an undesirable offset of the support cable 20 on the winch drum 24 occurs before the compaction element 30 is raised from the ground again.
- a clean winding can be carried out via the winch drum 24, followed by a lifting of the compaction element 30 from the ground. This allows a clean winding of the support rope 20 on the winch drum 24.
- a further, generally known, rope pressure device 40 with a plate-shaped pressure element 42 can be provided on the winch drum 24.
- the pressure element 42 is movably mounted by means of a base support 46 and can be pressed onto the rope winding on the winch drum 24 by means of a pressure cylinder 48 to additionally prevent rope misalignment.
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mechanical Engineering (AREA)
- Soil Sciences (AREA)
- Environmental & Geological Engineering (AREA)
- Agronomy & Crop Science (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Mining & Mineral Resources (AREA)
- Paleontology (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Road Paving Machines (AREA)
Description
- Die Erfindung betrifft ein Verfahren zur Bodenverdichtung mit einer Baumaschine, wobei ein Tragseil entlang eines Mastes geführt wird, das Tragseil mittels einer drehbar gelagerten Windentrommel einer Seilwinde auf- und abgewickelt wird, die Windentrommel mittels eines Windenantriebes drehend angetrieben wird und an dem Tragseil ein Verdichtungselement angeordnet wird, welches durch das Tragseil vertikal bewegt wird, wobei das Tragseil von der Windentrommel der Seilwinde abgewickelt wird und das Verdichtungselement von einer Position oberhalb einer Bodenfläche an dem Tragseil bis zu der Bodenfläche abgesenkt wird, wobei das Verdichtungselement auf die Bodenfläche aufschlägt und dabei den Boden verdichtet, gemäß dem Oberbegriff des Anspruchs 1.
- Die Erfindung betrifft weiterhin eine Baumaschine zur Bodenverdichtung mit einem Mast, einem Tragseil, welches entlang des Mastes geführt ist, einer Seilwinde mit einer drehbar gelagerten Windentrommel, an welcher das Tragseil zum Aufwickeln und Abwickeln angebracht ist, einem Windenantrieb zum drehenden Antreiben der Windentrommel, einem Verdichtungselement, welches zum vertikalen Bewegen an dem Tragseil angebracht ist, und einer Steuereinheit, durch welche die Seilwinde zum Abwickeln des Tragseiles von der Windentrommel betreibbar ist, wobei das Verdichtungselement an dem Tragseil bis zu einer Bodenfläche abgesenkt wird und das Verdichtungselement zum Verdichten des Bodens auf die Bodenfläche aufschlägt, gemäß dem Oberbegriff des Anspruchs 11.
- Eine gattungsgemäße Baumaschine geht beispielsweise aus der
EP 3 708 528 A1 hervor. - Bei einem Absenken eines Verdichtungselementes mittels einer solchen Baumaschine ist es üblicherweise vorgesehen, dass nach dem Auftreffen des Verdichtungselementes auf den Boden die Windentrommel mittels einer entsprechenden Bremseinrichtung abgebremst wird. Da das Verdichtungselement mit einer relativ schnellen Absenkgeschwindigkeit auf eine Bodenfläche auftrifft, kann sich an dem Tragseil sogenanntes Schlappseil und eine unerwünschte Seilschwingung ausbilden, die sich über den Mastkopf bis zu einer Windentrommel fortsetzt. Diese Seilschwingung kann dazu führen, dass Seilwicklungen an der Windentrommel aus ihrer vorgesehenen Position springen. Bei einem weiteren Betrieb der Windentrommel kann dies zu einem inkorrekten Aufwickeln des Tragseiles auf der Windentrommel führen, wobei das Seil die Rillung auf der Trommel kreuzt.
- Eine derartige ungeordnete Seilwicklung an der Windentrommel kann zu Beschädigungen an der Windentrommel und insbesondere zu einem erhöhten Verschleiß des Tragseiles führen. Hierdurch kann sich nicht nur die Lebensdauer des Tragseiles erheblich verkürzen, sondern es kann insgesamt auch die maximale Traglast des Tragseiles beeinträchtigt werden.
- Zur Sicherstellung einer korrekten Aufwicklung lehrt die
EP 3 708 528 A1 im Bereich der Windentrommel eine Seilandruckeinrichtung mit mindestens einem Andruckelement vorzusehen. Hierdurch kann ein Ausbreiten der Seilschwingung des Tragseiles auf den auf der Windentrommel aufgewickelten Seilbereich zuverlässig vermieden werden. Die Seilandruckeinrichtung bedeutet einen zusätzlichen konstruktiven Aufwand und ist mit einem entsprechenden Platzbedarf an der Baumaschine verbunden. Weiterhin benötigt die Seilandruckeinrichtung auch eine Wartung in gewissen Zeitabständen. - Der Erfindung liegt die Aufgabe zugrunde, ein Verfahren und eine Baumaschine zur Bodenverdichtung anzugeben, mit welchen den negativen Auswirkungen einer Seilschwingung des Tragseiles auf die Seilwicklung an der Windentrommel besonders effizient entgegengewirkt wird.
- Die Aufgabe wird nach der Erfindung zum einen durch ein Verfahren mit den Merkmalen des Anspruchs 1 und zum anderen durch eine Baumaschine mit den Merkmalen des Anspruchs 11 gelöst. Bevorzugte Ausführungsformen der Erfindung sind in den abhängigen Ansprüchen angegeben.
- Gemäß dem erfindungsgemäßen Verfahren ist zur Lösung der Aufgabe vorgesehen, dass nach dem Aufschlagen des Verdichtungselementes auf den Boden das Tragseil im Bereich der Winde zunächst kurz gespannt und anschließend vor einem erneuten Anheben des Verdichtungselementes vom Boden das Tragseil automatisch durch die Steuereinheit von der Windentrommel um einen gewissen Betrag abgewickelt wird. Vorzugsweise wird das Tragseil im direkten Anschluss wieder aufgewickelt.
- Gemäß diesem Verfahren nach der Erfindung ist vorgesehen, einem inkorrekten Aufwickeln des Tragseils auf der Windentrommel dadurch entgegenzuwirken, indem das Tragseil zuerst im Bereich der Winde ohne Anheben des Verdichtungselementes vom Boden kurz gespannt wird. Im Anschluss, vor einem Anheben des Verdichtungselementes vom Boden wird das so gespannte Tragseil automatisch durch die Steuereinheit um einen gewissen Betrag abgewickelt und entspannt, wobei ein möglicherweise aufgetretener Versatz der Wicklung auf der Windentrommel durch Abwickeln wieder entfernt wird.
- Anschließend kann das Tragseil wieder automatisch durch die Steuereinheit aufgewickelt und das Verdichtungselement vom Boden abgehoben werden, bis das Verdichtungselement wieder die gewünschte Ausgangsposition oberhalb des Bodens für einen erneuten Verdichtungsvorgang erreicht.
- Bei diesem erfindungsgemäßen Verfahren ist sichergestellt, dass selbst bei einem aufgetretenen Versatz an der Seilwicklung dieser automatisch durch die Steuereinheit wieder zuverlässig beseitigt wird und sich so keine bleibende inkorrekte Wicklung des Tragseiles an der Windentrommel ausbilden kann. Hierdurch wird ebenfalls einem Seilverschleiß zuverlässig entgegengewirkt.
- Der Betrag oder das Maß des Abwickelns des Tragseiles vor einem erneuten Anheben des Verdichtungselementes durch Aufwickeln des Tragseiles kann in jeder geeigneten Weise eingestellt werden. Besonders vorteilhaft ist es nach einer Weiterbildung der Erfindung, dass ein Abwickeln des Tragseiles soweit erfolgt, bis eine korrekte Wicklung des Tragseiles auf der Windentrommel gegeben ist. Hierdurch wird auch langfristig eine saubere Wicklung und damit ein geringer Verschleiß des Tragseiles sichergestellt.
- Die Wicklung kann dabei bei entsprechender Anordnung der Windentrommel an einer Baumaschine unmittelbar durch einen Maschinenbediener aus einer Bedienkabine beobachtet werden. Eine saubere Seilwicklung kann auch bei einer beliebigen Anordnung der Windentrommel nach einer Weiterentwicklung der Erfindung dadurch sichergestellt werden, dass mittels einer Sensoreinheit, insbesondere einer Kameraeinheit oder einer Radareinheit oder einem anderen geeigneten Sensor, eine Wicklung des Tragseiles auf der Windentrommel erfasst wird. Das Bild der Kameraeinheit etwa kann dabei einem Maschinenbediener in der Maschinenkabine angezeigt werden. Eine Erfassung kann optisch, berührungslos über Energiewellen, taktil, elektronisch, magnetisch, durch Reed-Kontakt oder in einer sonstigen geeigneten Weise erfolgen.
- Alternativ oder ergänzend kann die Sensoreinheit mit der Steuereinheit in Verbindung stehen, welche anhand von durch die Sensoreinheit erfassten Signalen oder Daten ermittelt, ob eine korrekte Wicklung auf der Windentrommel gegeben ist. Das Signal oder die Daten können insbesondere ein Bild sein. Das erfasste Sensorsignal zur Seilwicklung wird elektronisch, etwa mit einer Bildverarbeitungssoftware, ausgewertet. Abhängig von einem eventuell festgestellten Versatz einer Seilwicklung auf der Windentrommel kann durch den Maschinenbediener oder die Steuereinheit ein Betrag oder ein Maß der Abwicklung des Tragseiles individuell eingestellt werden, bis eine korrekte Seilwicklung an der Windentrommel gegeben ist. Der Betrag der Abwicklung kann als ein Drehwinkelmaß für die Windentrommel oder ein Längenmaß für das Tragseil oder eine Zeitspanne für die Ansteuerung des Windenantriebs (mit definierter Geschwindigkeit) vorgegeben sein.
- Nach einer Weiterbildung des erfindungsgemäßen Verfahrens ist es vorgesehen, dass der Betrag der Abwicklung des Tragseiles vor einem erneuten Hubvorgang des Verdichtungselementes automatisch durch die Steuereinheit oder durch einen Maschinenbediener eingestellt wird. Der Betrag kann gleichbleibend oder veränderlich sein.
- Eine Weiterbildung des erfindungsgemäßen Verfahrens zur Bodenverdichtung ist dadurch gekennzeichnet, dass die Windentrommel beim Abwickeln des Tragseiles über eine Kupplungseinrichtung von dem Windenantrieb entkoppelt wird, dass noch vor einem Aufschlagen des Verdichtungselementes auf die Bodenfläche der Windenantrieb in einer Drehrichtung zum Aufwickeln des Tragseiles angetrieben wird und dass nach dem Aufschlagen des Verdichtungselementes auf die Bodenfläche die Kupplungseinrichtung die Windentrommel mit dem bereits drehend angetriebenen Windenantrieb kuppelt.
- Das Verfahren beruht dabei auf der Erkenntnis, dass eine unzureichende Spannung des Tragseiles im Bereich der Winde verursacht durch eine Seilschwingung dazu führen kann, dass Seilwicklungen an der Windentrommel aus ihrer vorgesehenen Position springen. Gemäß dem erfindungsgemäßen Verfahren wird der Windenantrieb über eine Kupplungseinrichtung beim Abwickeln des Tragseiles in einer Zeitspanne vor dem Aufschlagen des Verdichtungselementes auf die Bodenfläche von der Windentrommel entkoppelt. Die Bewegung der Windentrommel ist somit unabhängig von der Bewegung des Windenantriebes. Diese Unabhängigkeit kann dazu genutzt werden, den Windenantrieb frühzeitig in einer Drehrichtung zu betreiben, welche zum Aufwickeln des Tragseiles benötigt wird. Durch die Kupplungseinrichtung kann insbesondere unmittelbar nach dem Aufschlagen des Verdichtungselementes auf die Bodenfläche die Windentrommel wieder mit dem Windenantrieb verbunden oder gekuppelt werden, wobei sich das an der Antriebswelle anliegende Drehmoment des Windenantriebes unmittelbar auf die Windentrommel auswirken kann und eine daraus resultierende abrupt startende Drehbewegung der Windentrommel Richtung Aufwickeln des Tragseils zu einer sehr schnellen Seilspannung im Bereich der Winde führt.
- Die sonst übliche Anlaufphase eines Windenantriebes wird dabei vermieden. Nach der Erfindung kann so unmittelbar nach oder beim Auftreffen des Verdichtungselementes auf die Bodenfläche über die Windentrommel eine Aufwickelkraft auf das Tragseil aufgebracht werden, so dass dieses im Bereich der Winde wieder unmittelbar gespannt wird. Aufgrund dieser sich unmittelbar einstellenden Seilspannung wird einer Bildung von Schlappseil im Bereich der Winde und einem damit verbundenen Springen von Seilwicklungen an der Windentrommel aus ihrer vorgesehenen Position in erheblichem Maße entgegengewirkt. Hierdurch reduziert sich die Gefahr eines unerwünschten Versatzes von Seilwicklungen auf der Windentrommel.
- Das Tragseil kann grundsätzlich direkt mit dem Verdichtungselement verbunden sein. Bevorzugt ist eine Kette und/oder ein Stahlseilgehänge als ein Puffer zwischen dem Tragseil und dem Verdichtungselement angeordnet. Hierdurch kann beim Abbremsen eine Stauchung des Tragseiles durch Aufstehen auf dem Verdichtungselement vermieden werden. Bei einem Stahlseilgehänge kann optional zwischen Tragseil und dem Stahlseilgehänge mindestens ein zusätzliches Gewicht, etwa in Form einer Stahltraverse, angeordnet sein.
- Grundsätzlich kann das Verfahren zur Bodenverdichtung von Hand durch einen Maschinenbediener durchgeführt werden. Besonders vorteilhaft ist es nach einer Weiterbildung der Erfindung, dass das Verfahren automatisch mittels einer Steuereinheit durchgeführt wird. Die Steuereinheit kann dabei insbesondere mit dem Windenantrieb und der Kupplungseinrichtung in Verbindung stehen und diese entsprechend betätigen. Die Steuereinheit kann auch mit einem oder mehreren Sensoren in Verbindung stehen, durch welche eine Position des Verdichtungselementes und/oder die Seilspannung erfasst wird. Die Kupplungseinrichtung kann als eine sperrbare Freilaufkupplung ausgebildet sein, wobei ein Sperren oder Entsperren von der Steuereinheit bewirkt werden kann.
- Die Kupplungseinrichtung kann grundsätzlich in jeder geeigneten Weise ausgebildet sein. Besonders zweckmäßig ist es nach einer Weiterentwicklung der Erfindung, dass die Kupplungseinrichtung eine Freifallbremse umfasst, wobei ein Abwickeln des Tragseiles in einem Freifall des Verdichtungselementes erfolgt. Durch eine Freifallbremse kann nach Öffnung der Bremse die Windentrommel reibungsarm allein durch das Gewicht des am Tragseil angehängten Verdichtungselementes angetrieben werden, wobei das Verdichtungselement sozusagen im freien Fall auf die Bodenfläche aufschlagen kann. Bei diesem freien Fall ist eine gewisse Mindestzugspannung an dem Tragseil gegeben. Durch die Freifallbremse kann auf elektronischem Weg oder durch entsprechende mechanische Komponenten bei einem Auftreffen auf die Bodenfläche und einer dabei auftretenden Reduzierung der Seilspannung ein Freifall- oder Freilaufmodus beendet werden, wobei unmittelbar ein Kuppeln, also die Herstellung einer drehmomentübertragenden Verbindung, zwischen dem Windenantrieb und der Windentrommel hergestellt werden. Die Freifallbremse, die ein Teil der Kupplungseinrichtung sein kann oder diese insgesamt bildet, kann in Verbindung mit der Steuereinheit stehen, welche grundsätzlich eine elektronische Rechnereinheit umfassen kann.
- Grundsätzlich kann die Kupplungseinrichtung zu jedem beliebigen Zeitpunkt betätigt werden. Eine bevorzugte Verfahrensvariante der Erfindung besteht darin, dass die Kupplungseinrichtung bei Erreichen der Bodenfläche durch das Verdichtungselement ein Kuppeln durchführt. Damit ist sichergestellt, dass zum einen eine möglichst freie Fallbewegung des Verdichtungselementes erreicht wird und zum anderen unmittelbar nach Auftreffen auf dem Boden eine Drehmomentübertragung von dem Windenantrieb auf die Windentrommel zur Erzeugung einer gewünschten Seilspannung des Tragseiles im Bereich der Winde gegeben ist.
- Grundsätzlich kann ein beliebiges Drehmoment für eine beliebige Zeitspanne an dem Windenantrieb eingestellt werden. Gemäß einer Weiterbildung des erfindungsgemäßen Verfahrens ist es vorteilhaft, dass durch den Windenantrieb beim Kuppeln ein Anzugsdrehmoment erzeugt wird, durch welches das Tragseil im Bereich der Winde gespannt wird. Das Anzugsdrehmoment kann vorzugsweise so ausgebildet sein, dass dieses zu einer gewünschten Seilspannung führt, jedoch das Verdichtungselement nicht vom Boden angehoben wird. Zum Anheben kann dann ein zweites, höheres Drehmoment eingestellt werden. Es ist jedoch auch die Einstellung eines Anzugsdrehmoments möglich, bei dem unmittelbar ein Anheben des Verdichtungselementes erfolgt, so dass dieses zu einer Ausgangsposition oberhalb der Bodenfläche zurückbewegt werden kann, um einen weiteren Verdichtungsvorgang durchzuführen.
- Hinsichtlich der Baumaschine ist die Erfindung dadurch gekennzeichnet, dass eine Steuereinheit vorgesehen ist, welche zum Durchführen eines der zuvor beschriebenen Verfahren zur Bodenverdichtung ausgebildet ist. Die Steuereinheit kann dabei insbesondere eine elektronische Steuereinheit sein und insbesondere in eine bestehende Steuereinheit einer Baumaschine integriert werden.
- Grundsätzlich kann die Windentrommel auch unmittelbar am Mast und insbesondere in einem oberen Bereich des Mastes angeordnet sein. Besonders zweckmäßig ist es nach einer Weiterbildung der Erfindung, dass das Tragseil über einen Mastkopf am oberen Ende des Mastes geführt ist. Die Windentrommel und der Windenantrieb können so insbesondere unmittelbar oder nahe an einem Trägergerät vorgesehen sein, so dass die Baumaschine insgesamt einen möglichst tiefliegenden Gesamtschwerpunkt aufweist.
- Das Trägergerät kann insbesondere einen Unterwagen mit einem darauf drehbar gelagerten Oberwagen aufweisen. Der Unterwagen kann insbesondere ein Fahrwerk, insbesondere ein Raupenfahrwerk, umfassen.
- Zur Sicherstellung einer korrekten Wicklung auf der Windentrommel ist es nach einer Weiterbildung der Erfindung zweckmäßig, dass im Bereich der Windentrommel mindestens eine Sensoreinheit, insbesondere eine Kameraeinheit, eine Radareinheit oder ein Ultraschall- bzw. ein weiterer geeigneter Sensor, zum Erfassen einer Wicklung des Tragseiles auf der Windentrommel angeordnet ist.
- Die Erfindung wird nachfolgend anhand eines bevorzugten Ausführungsbeispieles weiter erläutert, welches schematisch in den beigefügten Zeichnungen dargestellt ist. In den Zeichnungen zeigen:
- Fig. 1
- eine Seitenansicht einer erfindungsgemäßen Baumaschine, und
- Fig. 2
- eine perspektivische Detailansicht einer Windentrommel.
- Eine als Raupenkran ausgebildete erfindungsgemäße Baumaschine 10 von
Fig. 1 weist ein mobiles Trägergerät 12 auf. Das Trägergerät 12 umfasst ein Raupenfahrwerk 14, auf welchem ein Oberwagen 15 drehbar gelagert ist. An dem Oberwagen 15 ist schwenkbar um eine horizontale Schwenkachse ein Mast 16 gelagert, welcher auch als ein Auslegerarm bezeichnet wird. Zum Verschwenken des Mastes 16 sind am Oberwagen 15 in grundsätzlich bekannter Weise ein Halteträger 26, ein Stützträger 28 und ein Stellseilmechanismus 27 vorgesehen. - Über einen Mastkopf 18 des Mastes 16 ist vom Oberwagen 15 mindestens ein Tragseil 20 geführt, an welchem ein Verdichtungselement 30 aufgehängt ist, welches in dem dargestellten Ausführungsbeispiel als ein Aufschlaggewicht 32 für eine Bodenverdichtung ausgebildet ist. In dem Ausführungsbeispiel ist das Tragseil 20 über eine doppelte Windenanordnung in dem Oberwagen 15 verstellbar angetrieben, wie dies grundsätzlich aus dem Stand der Technik bekannt ist. Zur Vermeidung einer Seilschwingung können an den insgesamt zwei Abschnitten des Tragseiles 20 jeweils eine Seilandruckeinrichtung 40 angeordnet sein, von denen eine an dem Halteträger 26, auch A-Bock genannt, und die andere an dem Mast 16 angebracht ist. Die Enden des Tragseils 20 sind jeweils an einer Seilwinde im Oberwagen 15 angebracht, so dass eine Doppelseilwindenanordnung für schnelle Hubvorgänge gegeben ist. Am Oberwagen 15 kann insbesondere in einer Kabine eine Steuereinheit vorgesehen sein.
- Gemäß
Fig. 2 ist eine mögliche Anordnung einer Seilwinde 22 für die erfindungsgemäße Baumaschine 10 dargestellt. Die Seilwinde 22 weist eine Windentrommel 24 zum Auf- und Abwickeln des Tragseiles 20 auf. Die Windentrommel 24 kann über einen nur teilweise dargestellten Windenantrieb 23 über eine zwischengeschaltete Kupplungseinrichtung 25 drehend in grundsätzlich beide Drehrichtungen angetrieben werden. - Die Kupplungseinrichtung 25 kann als eine sperrbare Freilaufkupplung oder eine sogenannte Freifallbremse ausgebildet sein, wobei das Tragseil 20 allein über das Gewicht des Verdichtungselementes 30 sozusagen im freien Fall abgewickelt wird. Beim Aufschlagen des Verdichtungselementes 30 auf eine Bodenfläche zur Bodenverdichtung kann die Kupplungseinrichtung 25 unmittelbar wieder eine drehfeste Verbindung zwischen dem Windenantrieb 23 und der Windentrommel 24 herstellen.
- Es ist dabei vorgesehen, dass bereits vor einem erneuten Verbinden durch die Kupplungseinrichtung 25 der Windenantrieb 23 vorzugsweise über die Steuereinheit in eine Aufwickelrichtung, im dargestellten Ausführungsbeispiel im Uhrzeigersinn, angetrieben wird. Somit liegt unmittelbar beim Kuppeln durch die Kupplungseinrichtung 25 ein Anzugsdrehmoment des Windenantriebes 23 an der Windentrommel 24 an. So kann eine gewünschte Spannung des Tragseiles 20 im Bereich der Seilwinde 22 bewirkt werden. Hierdurch wird der Ausbildung von Schlappseil und insbesondere der Übertragung einer Seilschwingung des Tragseiles 20 auf die Wicklung des Tragseiles 20 auf der Windentrommel 24 effektiv entgegengewirkt. Eine saubere Wicklung des Tragseiles 20 auf der Windentrommel 24 kann von einer Kameraeinheit 50 als Sensoreinheit überwacht werden. Anstelle der Kameraeinheit 50 kann auch eine Radareinheit, Ultraschall- oder ein anderer geeigneter Sensor wie z. B. ein optischer Sensor, ein Magnetsensor oder ein Reed-Kontakt verwendet werden.
- Abhängig von dem erfassten Bild bzw. Sensorsignal durch die Kameraeinheit 50 bzw. dem angezeigten Sensorsignal kann über einen Maschinenbediener oder vorzugsweise automatisch über die Steuereinheit beim Auftreten eines unerwünschten Versatzes des Tragseiles 20 an der Windentrommel 24 eine Abwicklung des Tragseiles 20 erfolgen, bevor das Verdichtungselement 30 wieder vom Boden angehoben wird.
- Insbesondere nach Beruhigung einer Seilschwingung kann über die Windentrommel 24 ein sauberes Aufwickeln mit einem anschließenden Abheben des Verdichtungselementes 30 vom Boden erfolgen. So kann sich eine saubere Wicklung des Tragseiles 20 auf der Windentrommel 24 einstellen.
- Ergänzend kann an der Windentrommel 24 eine grundsätzlich bekannte weitere Seilandruckeinrichtung 40 mit einem plattenförmigen Andruckelement 42 vorgesehen sein. Das Andruckelement 42 ist bewegbar mittels eines Grundträgers 46 gelagert und kann mittels eines Andruckzylinders 48 zur zusätzlichen Vermeidung eines Seilversatzes an die Seilwicklung auf der Windentrommel 24 angedrückt werden.
Claims (13)
- Verfahren zur Bodenverdichtung mit einer Baumaschine (10), wobei- ein Tragseil (20) entlang eines Mastes (16) geführt wird,- das Tragseil (20) mittels einer drehbar gelagerten Windentrommel (24) einer Seilwinde (22) auf- und abgewickelt wird,- die Windentrommel (24) mittels eines Windenantriebes (23) drehend angetrieben wird und- an dem Tragseil (20) ein Verdichtungselement (30) angeordnet wird, welches durch das Tragseil (20) vertikal bewegt wird, wobei das Tragseil (20) von der Windentrommel (24) der Seilwinde (22) abgewickelt wird und das Verdichtungselement (30) von einer Position oberhalb einer Bodenfläche an dem Tragseil (20) bis zu der Bodenfläche abgesenkt wird, wobei das Verdichtungselement (30) auf die Bodenfläche aufschlägt und dabei der Boden verdichtet wird,
dadurch gekennzeichnet,- dass das Tragseil (20) nach dem Aufschlagen des Verdichtungselementes (30) auf den Boden zunächst im Bereich der Seilwinde (22) gespannt und anschließend vor einem erneuten Anheben des Verdichtungselementes (30) vom Boden das Tragseil (20) automatisch von der Steuereinheit von der Windentrommel (24) um einen gewissen, vorzugsweise vom Maschinenführer einstellbaren, Betrag abgewickelt wird. - Verfahren nach Anspruch 1,
dadurch gekennzeichnet,
dass ein Abwickeln des Tragseiles (20) soweit erfolgt, bis eine korrekte Wicklung des Tragseiles (20) auf der Windentrommel (24) gegeben ist. - Verfahren nach einem der Ansprüche 1 oder 2,
dadurch gekennzeichnet,
dass der Betrag der Abwicklung des Tragseiles (20) vor einem erneuten Hubvorgang des Verdichtungselementes (30) durch einen Maschinenbediener oder automatisch durch eine Steuereinheit eingestellt wird. - Verfahren nach einem der Ansprüche 1 bis 3,
dadurch gekennzeichnet,
dass mittels einer Sensoreinheit, insbesondere einer Kameraeinheit (50) oder einer Radareinheit, eine Wicklung des Tragseiles (20) auf der Windentrommel (24) erfasst wird. - Verfahren nach Anspruch 4,
dadurch gekennzeichnet,
dass die Sensoreinheit mit einer Steuereinheit in Verbindung steht, welche anhand eines von der Sensoreinheit erfassten Signals ermittelt, ob eine korrekte Wicklung auf der Windentrommel (24) gegeben ist. - Verfahren nach einem der Ansprüche 1 bis 5,
dadurch gekennzeichnet,
dass das Verfahren automatisch mittels einer Steuereinheit durchgeführt wird. - Verfahren nach einem der Ansprüche 1 bis 6,
dadurch gekennzeichnet,- dass die Windentrommel (24) beim Abwickeln des Tragseiles (20) über eine Kupplungseinrichtung (25) von dem Windenantrieb (23) entkoppelt wird,- dass noch vor einem Aufschlagen des Verdichtungselementes (30) auf die Bodenfläche der Windenantrieb (23) in einer Drehrichtung zum Aufwickeln des Tragseiles (20) angetrieben wird und- dass nach dem Aufschlagen des Verdichtungselementes (30) auf die Bodenfläche die Kupplungseinrichtung (25) die Windentrommel (24) mit dem bereits drehend angetriebenen Windenantrieb (23) kuppelt. - Verfahren nach Anspruch 7,
dadurch gekennzeichnet,
dass die Kupplungseinrichtung (25) eine Freifallbremse umfasst, wobei ein Abwickeln des Tragseiles (20) in einem Freifall des Verdichtungselementes (30) erfolgt. - Verfahren nach Anspruch 7 oder 8,
dadurch gekennzeichnet,
dass die Kupplungseinrichtung (25) bei Erreichen der Bodenfläche durch das Verdichtungselement (30) ein Kuppeln durchführt. - Verfahren nach einem der Ansprüche 1 bis 9,
dadurch gekennzeichnet,
dass durch den Windenantrieb (23) beim Kuppeln ein Anzugsdrehmoment erzeugt wird, durch welches das Tragseil (20) im Bereich der Seilwinde (22) gespannt wird. - Baumaschine zur Bodenverdichtung, mit- einem Mast (16),- einem Tragseil (20), welches entlang des Mastes (16) geführt ist,- einer Seilwinde (22) mit einer drehbar gelagerten Windentrommel (24), an welcher das Tragseil (20) zum Aufwickeln und Abwickeln angebracht ist,- einem Windenantrieb (23) zum drehenden Antreiben der Windentrommel (24),- einem Verdichtungselement (30), welches zum vertikalen Bewegen an dem Tragseil (20) angeordnet ist, und- einer Steuereinheit, durch welche die Seilwinde zum Abwickeln des Tragseiles (20) von der Windentrommel betreibbar ist, wobei das Verdichtungselement (30) an dem Tragseil (20) bis zu einer Bodenfläche abgesenkt wird und das Verdichtungselement (30) zum Verdichten des Bodens auf die Bodenfläche aufschlägt,dadurch gekennzeichnet,
dass eine Steuereinheit vorgesehen ist, welche zum Durchführen des Verfahrens zur Bodenverdichtung nach einem der Ansprüche 1 bis 10 ausgebildet ist. - Baumaschine nach Anspruch 11,
dadurch gekennzeichnet,
dass das Tragseil (20) über einen Mastkopf (18) am oberen Ende des Mastes (16) geführt ist. - Baumaschine nach Anspruch 11 oder 12,
dadurch gekennzeichnet,
dass im Bereich der Windentrommel (24) mindestens eine Sensoreinheit, insbesondere eine Kameraeinheit (50) oder eine Radareinheit, zum Erfassen einer inkorrekten Wicklung des Tragseiles (20) auf der Windentrommel (24) angeordnet ist.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22204100.6A EP4144919B1 (de) | 2020-11-11 | 2020-11-11 | Verfahren und baumaschine zur bodenverdichtung |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP20206938.1A EP4001509B1 (de) | 2020-11-11 | 2020-11-11 | Verfahren und baumaschine zur bodenverdichtung |
| EP22204100.6A EP4144919B1 (de) | 2020-11-11 | 2020-11-11 | Verfahren und baumaschine zur bodenverdichtung |
Related Parent Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20206938.1A Division EP4001509B1 (de) | 2020-11-11 | 2020-11-11 | Verfahren und baumaschine zur bodenverdichtung |
| EP20206938.1A Division-Into EP4001509B1 (de) | 2020-11-11 | 2020-11-11 | Verfahren und baumaschine zur bodenverdichtung |
Publications (4)
| Publication Number | Publication Date |
|---|---|
| EP4144919A2 EP4144919A2 (de) | 2023-03-08 |
| EP4144919A3 EP4144919A3 (de) | 2023-04-26 |
| EP4144919B1 true EP4144919B1 (de) | 2024-08-07 |
| EP4144919C0 EP4144919C0 (de) | 2024-08-07 |
Family
ID=73343916
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22204100.6A Active EP4144919B1 (de) | 2020-11-11 | 2020-11-11 | Verfahren und baumaschine zur bodenverdichtung |
| EP23186219.4A Active EP4249685B1 (de) | 2020-11-11 | 2020-11-11 | Verfahren und baumaschine zur bodenverdichtung |
| EP20206938.1A Active EP4001509B1 (de) | 2020-11-11 | 2020-11-11 | Verfahren und baumaschine zur bodenverdichtung |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23186219.4A Active EP4249685B1 (de) | 2020-11-11 | 2020-11-11 | Verfahren und baumaschine zur bodenverdichtung |
| EP20206938.1A Active EP4001509B1 (de) | 2020-11-11 | 2020-11-11 | Verfahren und baumaschine zur bodenverdichtung |
Country Status (1)
| Country | Link |
|---|---|
| EP (3) | EP4144919B1 (de) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115821913A (zh) * | 2022-11-03 | 2023-03-21 | 北京瑞力通地基基础工程有限责任公司 | 一种具有质量控制的孔内深层强夯法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1040215B (de) * | 1955-06-17 | 1958-10-02 | Asea Ab | Vorrichtung zur Vermeidung von Schlappseilbildung |
| JPH076182B2 (ja) * | 1987-04-23 | 1995-01-30 | 日立建機株式会社 | 動圧密工法の施工管理装置 |
| CN106149671B (zh) * | 2015-03-23 | 2018-09-04 | 徐工集团工程机械股份有限公司 | 强夯机自动作业的控制系统和方法、及强夯机 |
| DE102015115146A1 (de) * | 2015-09-09 | 2017-03-09 | Bauer Maschinen Gmbh | Baumaschine und Verfahren zum Auf- und Abbewegen eines Hubelementes |
| DE102016008819A1 (de) * | 2016-07-19 | 2018-01-25 | Liebherr-Werk Nenzing Gmbh | Schlagzahloptimierung |
| CN107829424A (zh) * | 2017-11-08 | 2018-03-23 | 泰安大地强夯重工科技有限公司 | 一种自动遥控强夯机 |
| EP3708528B1 (de) * | 2019-03-12 | 2021-10-13 | BAUER Maschinen GmbH | Arbeitsmaschine und verfahren zum betreiben der arbeits-maschine |
-
2020
- 2020-11-11 EP EP22204100.6A patent/EP4144919B1/de active Active
- 2020-11-11 EP EP23186219.4A patent/EP4249685B1/de active Active
- 2020-11-11 EP EP20206938.1A patent/EP4001509B1/de active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP4144919A3 (de) | 2023-04-26 |
| EP4001509A1 (de) | 2022-05-25 |
| EP4249685A2 (de) | 2023-09-27 |
| EP4144919A2 (de) | 2023-03-08 |
| EP4249685C0 (de) | 2025-07-30 |
| EP4144919C0 (de) | 2024-08-07 |
| EP4249685A3 (de) | 2023-10-18 |
| EP4249685B1 (de) | 2025-07-30 |
| EP4001509B1 (de) | 2023-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE69008494T2 (de) | Vorrichtung zum Auf- oder Abwickeln von Kabeln. | |
| DE602004010497T2 (de) | Automatisiertes steuersystem zum bohrlochräumen | |
| DE102010020016B4 (de) | Kran und Verfahren zum Aufrichten des Krans | |
| EP3705629A1 (de) | Rammvorrichtung und verfahren zum einrammen in einen boden | |
| DE102013017110A1 (de) | Vorrichtung zur Erkennung der Ablegereife eines hochfesten Faserseils beim Einsatz an Hebezeugen | |
| EP4144919B1 (de) | Verfahren und baumaschine zur bodenverdichtung | |
| EP2444355A1 (de) | Verfahren zur Steuerung einer Seilwinde eines Kettenfahrzeugs und Pistenraupe | |
| EP3670753B1 (de) | Rammvorrichtung und verfahren zum einrammen von rammgut | |
| EP3708528B1 (de) | Arbeitsmaschine und verfahren zum betreiben der arbeits-maschine | |
| EP3613903A1 (de) | Verfahren zur überwachung der strukturbelastung einer trägermaschine mit bohr- und rammgerät sowie arbeitsmaschine mit ramm- und bohrgerät | |
| AT14795U1 (de) | Forstwinde mit verbesserter Lenkung des Zugseils im Bereich der oberen Umlenkrolle | |
| DE102022132028B3 (de) | Kran mit Abspannbock und Verfahren zum Abspannen eines solchen | |
| EP2736831B1 (de) | Hebewerk | |
| DE102007008124A1 (de) | Seilsägesystem für den Natursteinbereich | |
| DE102020117578B4 (de) | Verfahren sowie vorspannvorrichtung für hubseiltrommeln | |
| EP2639357B1 (de) | Baumaschine und Verfahren zu deren Betrieb | |
| DE10113561B4 (de) | Vorschubvorrichtung für eine Ramm- und/oder Bohrvorrichtung | |
| EP2897892B1 (de) | Verfahren zum betrieb eines krans und kran | |
| DE3233960C1 (de) | Bremsprüfeinrichtung für Kraftfahrzeuge | |
| DE3615366C2 (de) | Verfahren und Ausrüstung zum Herstellen von an Ort und Stelle zu giessenden Betonpfählen | |
| DE102004019914B4 (de) | Mehrstufiges Hubsystem für einen Gabelstapler | |
| EP4174283B1 (de) | Baumaschine und verfahren zum betreiben der baumaschine | |
| EP4506507B1 (de) | Tiefbauvorrichtung und verfahren zum betrieb einer tiefbauvorrichtung | |
| EP0702111A2 (de) | Radial-Schrappwerk | |
| DE69104250T2 (de) | Vorrichtung zum Eintreiben von Stangen in den Boden, insbesondere für Bodenmechanikuntersuchungen. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 4001509 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E02D 3/046 20060101ALI20230317BHEP Ipc: B66D 1/36 20060101ALI20230317BHEP Ipc: E02D 3/02 20060101AFI20230317BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20230713 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20240305 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 4001509 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502020008836 Country of ref document: DE |
|
| U01 | Request for unitary effect filed |
Effective date: 20240813 |
|
| U07 | Unitary effect registered |
Designated state(s): AT BE BG DE DK EE FI FR IT LT LU LV MT NL PT SE SI Effective date: 20240827 |
|
| U20 | Renewal fee for the european patent with unitary effect paid |
Year of fee payment: 5 Effective date: 20241126 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241107 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241108 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240807 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241207 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240807 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241107 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240807 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241107 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240807 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241107 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241207 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240807 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241108 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240807 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240807 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240807 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240807 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240807 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| 26N | No opposition filed |
Effective date: 20250508 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241111 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240807 |
|
| U20 | Renewal fee for the european patent with unitary effect paid |
Year of fee payment: 6 Effective date: 20251124 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20251125 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20201111 |