EP3935002B1 - Kran - Google Patents
Kran Download PDFInfo
- Publication number
- EP3935002B1 EP3935002B1 EP20711085.9A EP20711085A EP3935002B1 EP 3935002 B1 EP3935002 B1 EP 3935002B1 EP 20711085 A EP20711085 A EP 20711085A EP 3935002 B1 EP3935002 B1 EP 3935002B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- rocker
- axis
- measurement axis
- balancing
- crane according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/52—Details of compartments for driving engines or motors or of operator's stands or cabins
- B66C13/54—Operator's stands or cabins
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C15/00—Safety gear
- B66C15/02—Safety gear for retaining load-engaging elements in the event of rope or cable breakage
Definitions
- the present invention relates to a crane with a height-adjustable control or personnel station, which can be raised and lowered by at least two lifting elements, wherein the two lifting elements are articulated to a balancing rocker, which is mounted on a rocker bearing head connected to the control or personnel station so as to be rockable about a horizontal pivot axis, wherein a monitoring and/or safety device is provided for monitoring and/or ensuring the safety of the control station.
- Such a crane is shown, for example, in the text EP 27 19 652 A1 , which discloses the features of the preamble of claim 1, wherein a person stand is suspended from two hoisting cables via a balancing rocker.
- a tension measuring tab is provided between the two hoisting cables and the balancing rocker in order to measure the hoisting cable force.
- Height-adjustable control stations can, for example, be mounted on the tower of a crane so that they can be moved lengthways and thus be adjusted in height.
- a crane tower can carry a boom in a known manner from which a hoist cable runs to a load hook, if necessary via a trolley that can be moved lengthways on the boom.
- the tower can be mounted telescopically and/or tiltably on an upper carriage, which can be mounted on an undercarriage that can be moved on the ground around an upright axis.
- Such cranes are sometimes referred to as mobile fast-erecting cranes.
- control station mentioned can also be provided on a conventional tower crane, or on another type of crane, whereby the control station does not necessarily have to be mounted on a tower in a movable manner, but can also be mounted in another way so that the height is adjustable.
- the control and/or personnel station is often designed in the form of a cabin or as a crane operator and/or lift cabin, whereby it can be advantageous if such a crane operator cabin can be positioned at different working heights for different lifting tasks of the crane.
- the lifting elements can be lifting cables that suspend the balancing rocker and thus the control station from above.
- actuators for example in the form of pressure cylinders, as lifting elements that can pull or push the balancing rocker into the desired position.
- a first limit switch can indicate a pre-critical condition, for example. If slack forms on the lifting cable that is reeled in more slowly, or if one of the two lifting cables breaks completely, so that only the other lifting cable supports the balancing rocker and thus the control station, maximum rotational deflection will occur, which can be indicated by another limit switch.
- a "normal" overload of the lift cabin should also be detected, for example if one person climbs into the cabin or the stand too many times or a person carries equipment that is too heavy, so that the permissible load is only slightly exceeded. Since the limit switches mentioned above, which indicate a strong tilting when a hoist rope breaks, do not respond in the case of such narrow exceedances, additional sensors must be installed in order to be able to detect such an overload condition.
- the existing safety and/or monitoring devices are relatively complex. If different critical states are to be distinguished, various mechanical limit switches are necessary, whereby the spring loading of the compensation rocker must be adjusted accordingly. On the other hand, even with more complex configurations of the safety and/or monitoring device, it is still not possible to It is difficult to monitor the situation with sufficient precision to intervene in the crane's control in a timely manner.
- the present invention is therefore based on the object of creating an improved crane of the type mentioned at the beginning, which avoids the disadvantages of the prior art and develops the latter in an advantageous manner.
- a sensitive monitoring of the suspension and operation of the height-adjustable control and/or personnel stand is to be achieved using simple means, which can distinguish between various critical states in order not only to enable an emergency shutdown, but also to enable the control device of the crane to take advance measures such as counteracting the control of the drives or issuing a maintenance notice.
- the swivel axis serves on the one hand to pivotally support the balancing rocker and at the same time to record the load state on the rocker bearing, so that the swivel axis fulfills a dual function.
- the swivel axis is designed as a measuring axis for recording the load state of the rocking bearing of the balancing rocker and providing a load signal to the monitoring and/or safety device.
- the measuring axis mentioned can in particular be designed as a force measuring bolt, which pivotably connects the balancing rocker to the rocker bearing head and records at least transverse forces transverse to the swivel axis.
- the suspension of the control station be built more compactly and require fewer components. At the same time, a sensitive measurement of the forces acting between the balancing rocker and the rocker bearing head is possible.
- the balancing rocker and/or the rocker bearing head and/or the measuring axis can be assigned a lever mechanism that converts tilting movements of the balancing rocker and/or the rocker bearing head that exceed a predetermined value into a noticeable or detectable change in the load on the measuring axis or the bearing forces acting on the measuring axis.
- the lever mechanism mentioned can in particular be designed to convert a holding and/or braking torque that arises when stopping and/or braking a relative rotation of the balancing rocker relative to the rocker bearing head or is necessary for this into a bearing force acting on the measuring axis. If, for example, one of the lifting cables or elements breaks, the balancing rocker would twist until the holding force applied by the remaining lifting element passes vertically through the measuring axis. However, if the twisting is braked or stopped beforehand, the holding or braking torque required for this can be converted by the lever mechanism mentioned into a force that significantly changes the load on the measuring axis.
- the said lever mechanism can in particular comprise a swivel limiter which allows a certain swivelling movement between the compensating rocker and the rocker bearing head to occur during normal operation, but limits and/or brakes it when a certain swivel angle is reached in order to generate the said holding and/or braking torque and to convert it into a change in the measuring axis load.
- a swivel limiter which allows a certain swivelling movement between the compensating rocker and the rocker bearing head to occur during normal operation, but limits and/or brakes it when a certain swivel angle is reached in order to generate the said holding and/or braking torque and to convert it into a change in the measuring axis load.
- pivot stops can be provided on the compensating rocker and the rocker bearing head, which limit the possible pivoting movements of the compensating rocker relative to the rocker bearing head.
- the said pivot stops on the compensating rocker and the rocker bearing head can be arranged in such a way that the pivot stops are disengaged in a non-deflected neutral position of the compensating rocker and only come into engagement when a predetermined pivoting position of the compensating rocker relative to the rocker bearing head is reached and block any further pivoting movement beyond this.
- the said pivot stops can be arranged on a pitch circle around the measuring axis, in particular directly adjacent to the outer circumference of the said measuring axis, so that a relatively short lever arm with respect to the pivot axis results in larger changes in the load state when forces are transmitted via the pivot stops.
- the said pivot stops can be arranged on a pitch circle around the measuring axis, the diameter of which is less than 300% or less than 200% or less than 150% of the outer diameter of the said measuring axis.
- the pivot stops mentioned can be arranged in a horizontal plane that extends transversely to the effective axis of the lifting elements.
- the pivot stops mentioned can be arranged in the area from approximately 2 o'clock to 5 o'clock or in the area from approximately 8 o'clock to 10 o'clock.
- the arrangement of the swivel stops can be such that the forces transmitted by the swivel stops, when the swivel stops are engaged, run approximately in the direction of the actuating forces of the lifting elements and/or the weight of the control station.
- an evaluation device for evaluating the measurement signal of the measuring axis can be provided, which is configured to determine different critical states of the suspension of the control and/or passenger stand based on the height and/or a change in the measurement signal of the measuring axis.
- the aforementioned evaluation device can be designed to compare the measurement signal of the measuring axis with different threshold values in order to determine the load state, depending on which threshold value is exceeded or undershot.
- the evaluation device can work with a first threshold value that is located in the range of the permissible load of the control and/or passenger position or characterizes a load on the measuring axis, below which a normal operating state can be assumed and above which a "normal" exceedance of the permissible load can be assumed.
- the first Threshold value characterizes an operating state in which a transition between a still tolerated load and an excessive load occurs, but no abnormal twisting of the compensating rocker to the rocker bearing head has yet occurred.
- the evaluation device can compare the measuring axis signal with a second threshold value which characterizes a load on the measuring axis which only occurs in the event of an abnormal rotation of the balancing rocker relative to the rocker bearing head, in particular due to the aforementioned swivel limitation which limits the swiveling of the balancing rocker relative to the rocker bearing head and multiplies the weight load on the suspension by the weight of the control and/or passenger position including load.
- the second threshold value mentioned can be more than 20% or more than 40% above a load on the measuring axis that occurs at the maximum permitted load on the control and/or passenger stand with the balancing rocker not deflected or only slightly deflected or when the lifting elements are in proper operating condition.
- the evaluation device mentioned can be electronic, for example comprising switching elements integrated in the measuring axis sensor system.
- the evaluation device can also be part of an electronic control device, which can for example have a processor and a memory in which the threshold values mentioned can be stored.
- the evaluation device mentioned can be part of the electronic crane control device.
- the measuring axis mentioned can basically be designed in different ways in order to detect the amount and/or direction of the transverse forces acting on the measuring axis.
- a detection device for detecting an elastic deformation of the measuring axis can be assigned to the measuring axis.
- one or more strain gauges can be attached to the measuring axis mentioned in order to detect deformations of the measuring bolt.
- the measuring axis can be provided with a surface coating that shows a change in the electrical resistance when the measuring bolt is deformed.
- a surface coating can, for example, be designed in the form of a thin-film coating or in the form of a thin-film sensor.
- a magnetic field-based sensor can be assigned to the measuring axis in order to detect deformations and/or force loads or voltages acting in the measuring bolt.
- the measuring axis can serve as the iron core of a transformer circuit, so that strains in the measuring axis affect the magnetic properties and thus the voltage on a secondary coil.
- the measuring axis mentioned can be attached to the rocker bearing head in a rotationally fixed manner, whereby the balancing rocker can be held on the measuring axis mentioned so that it can rotate relative to the measuring axis.
- an overload protection device can be triggered or intervened, for example, if too many people enter the control station or the guide of the crane operator's cabin jams.
- the rocker bearing head can be rigidly connected to the control station.
- the rocker bearing head can advantageously be attached directly to the chassis of the control station. In principle, however, it would also be possible to indirectly link the rocker bearing head to the control station, for example via a link arrangement that holds the rocker bearing head to the control station.
- the lifting elements mentioned are flexible traction elements, particularly in the form of lifting ropes. Traction chains or belts are also conceivable.
- the lifting elements mentioned can also be designed in the form of actuators such as hydraulic cylinders, in which case it would also be possible to apply pressure to the compensating rocker, for example in the sense of upward pressure forces.
- the crane 1 can be designed as a tower crane and have a tower 2 which stands upright during operation and carries a cantilevered boom 3.
- the tower 2 can sit with its lower end on a slewing platform 4 which is rotatable about an upright axis and supported on an undercarriage 5, which can be designed as a truck or in another way movable, but can also form a rigid, non-movable support base if necessary.
- a trolley 7 can be mounted on the boom 3 so that it can be moved longitudinally and can be moved back and forth by means of a trolley cable 8.
- a hoist cable 6 with a load hook can run over the trolley 7.
- the crane 1 comprises a control and/or personnel stand 9, which can be designed as a crane operator's cabin or lift cabin 10.
- the control and/or personnel stand 9 is mounted so that it can be adjusted in height.
- the crane operator's cabin or lift cabin 10 can be mounted on the tower 2 so that it can be moved longitudinally, for example by means of a cabin chassis that is guided on the tower profile, for example its longitudinal belts.
- the control and/or personnel station 9 can be held by a suspension 11 and brought into different height positions, which can engage the chassis, in particular the top of the crane operator or lift cabin 10.
- the said cabin 10 can be moved up and down on an outside of the tower 2, for example by means of a roller guide or rail guide along the tower. If necessary, the cabin can also be arranged inside the tower profile, for example if it is only used as a climbing aid to reach the boom or a control station arranged above and the tower profile is sufficiently voluminous.
- the suspension 11 mentioned can in particular comprise a balancing rocker 12 to which two lifting elements 13 in the form of lifting cables can be articulated, which can be raised and lowered via a suitable lifting gear drive.
- two cable drums can be provided which can wind up and unwind the two lifting cables.
- the said balancing rocker 12 is by means of a pivot axis 14 which extends horizontally and engages a central section of the balancing rocker 12, pivotally mounted on a rocker bearing head 15, which can be rigidly connected to the control station 9, in particular fastened to the chassis of the cabin 10.
- the rocker bearing head 15 can, for example, form a bearing yoke, between the legs of which the balancing rocker 12 is inserted with a bearing section, wherein the legs of the rocker bearing head 15 and the bearing section of the balancing rocker 12 can have aligned pivot bearing bores through which the pivot axis 14 extends.
- it would also be possible to reverse the arrangement for example to provide two yoke legs on the bearing section of the balancing rocker 12, between which the rocker bearing head 15 extends.
- Other designs for example in the manner of a cantilevered pivot bearing connection, would also be possible.
- the pivot axis 14 is designed as a measuring axis 16 in order to be able to detect transverse forces acting on the pivot axis 14.
- the measuring axis 16 can be designed in the manner of a force measuring bolt, wherein a suitable sensor system can be provided on the measuring axis 16, which can detect the bearing forces and loads acting on the bolt.
- the sensor system 17 can comprise, for example, strain gauges on the measuring axis or a thin film coating applied thereto in order to be able to measure deformations and thus loads.
- the measuring axis 16 mentioned can be held in a rotationally fixed manner on the rocker bearing head 15 so that it does not follow rotational movements of the compensating rocker 12.
- the measuring axis 16 can also be mounted so that it can rotate relative to the rocker bearing head 15 and/or the compensating rocker 12 so that it does not assume a predetermined rotational position.
- pivot stops 18, which can be provided on the compensating rocker 12 and the rocker bearing head 15.
- the said pivot stops 18 can be arranged around the pivot axis 14 be arranged directly in the vicinity of its outer circumference, i.e. in particular around the bearing bores through which the pivot axis 14 extends.
- the aforementioned pivot stops 18 may be formed by projections formed on the balancing rocker 12 and the rocker bearing head 15 to collide with each other when the balancing rocker 12 pivots relative to the rocker bearing head 15.
- the mentioned swivel stops 18 can be in a non-deflected neutral position of the balancing rocker 12, which in Figure 4 shown, be disengaged from one another so that the balancing rocker 12 can rotate freely from the neutral position.
- the pivot stops 18 come into engagement when the balancing rocker has performed a predetermined pivoting movement, for example by an angle of approximately +/-10° to +/-20°.
- the pivot stops 18 are designed in such a way that engagement forces are generated on the engaging stop surfaces, which are eccentric with respect to the pivot axis 14 and/or have a lever arm in order to generate a reaction in the measuring axis.
- the pivot stops 18 can comprise two pairs of pivot stops 18 which are arranged on opposite sides of the measuring axis 16, preferably approximately - at least approximately - in a plane which extends horizontally through the pivot axis 14.
- the pivot stops 18 can extend in a range from 2 o'clock to 4 o'clock or 8 o'clock to 10 o'clock when the pivot axis 14 is viewed in its axial direction.
- the pivot stops 18 are advantageously arranged in such a way that, depending on the tilting movement of the compensating rocker, only one pair of stops engages on one side of the pivot axis 14.
- the swivel stops 18 form a lever mechanism that converts the torque or holding torque that occurs when limiting the swivel movement of the balancing rocker 12 into a significant change in the load on the measuring axis 16.
- the lever mechanism formed by the swivel stops 18 can multiply the load introduced into the suspension by the cabin, so that the load on the measuring axis 16 increases significantly, in particular increases much more than would be the case if the permissible load was only slightly exceeded, for example if an additional person got in.
- Fig. 5 shows, when a pair of swivel stops engages with a correspondingly further rotation of the balancing rocker, on the one hand a lever arm of the measuring axis or the cabin load passing through the measuring axis to the engaged pair of swivel stops and on the other hand a lever arm of the still load-bearing cable 13 to the pair of swivel stops 18, wherein the said lever arms each essentially correspond to the horizontal distance between the center of the measuring axis and the engagement point of the swivel stops on the one hand or the line of action of the cable pulling force and the point of engagement of the swivel stops 18 on the other hand.
- the length of the lever arms mentioned can be designed by appropriately designing the geometry of the balancing rocker and the rocker bearing head, in particular the articulation point of the lifting elements 13 on the balancing rocker and the arrangement of the swivel stops 18, such that the load occurring on the measuring axis 16 and thus measured increases by 50% or more when the swivel stops 18 mentioned come into engagement by appropriate pivoting of the balancing rocker 12.
- the lever arms mentioned can be set so that a load of 1500 kg occurs on the measuring axis 16 when the swivel stops 18 come into engagement.
- the sensor system 17 assigned to the measuring axis 16 emits a load signal which characterizes the load situation on the measuring axis 16, in particular indicates the transverse forces occurring there in terms of their magnitude and/or their direction.
- the said load signal of the sensor system 17 can be evaluated by a control device 20 of the crane 1, which control device 20 can be electronically designed and can, for example, comprise a microprocessor which can execute a control program stored in a memory.
- the control device 20 mentioned can have an evaluation device 19 which evaluates the measurement signal of the measuring axis 16 in the manner mentioned, in particular compares it with two threshold values which, on the one hand, characterize the normal transition from a normal, permissible load to an overload and, on the other hand, characterize the engagement of the swivel stops 18 and the associated change in the load on the measuring axis.
- the control device 20 mentioned can, on the one hand, emit a warning signal and/or stop at least one drive of the crane, in particular the hoist drive for the height adjustment of the control station 9, if the load signal of the sensor system 17 indicates an unusual load condition, for example excessive transverse forces on the measuring axis.
- control device 20 mentioned can also intervene preventively in the control of the drives. If the sensor system 17 determines, for example, that the compensation rocker is tilting too much, the control device 20 can attempt to correct the hoist drive from which the hoist cable that is too slack or too tight runs.
- control device 20 can also emit a preventive maintenance signal if the load signals of the sensors 17 do not yet indicate a critical condition, but already show significant changes compared to the original load collective when new.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Jib Cranes (AREA)
Description
- Die vorliegende Erfindung betrifft einen Kran mit einem höhenverstellbar gelagerten Steuer- bzw. Personenstand, der durch zumindest zwei Hubelemente anhebbar und absenkbar ist, wobei die beiden Hubelemente an einer Ausgleichswippe angelenkt sind, die um eine liegende Schwenkachse wippbar an einem mit dem Steuer- bzw. Personenstand verbundenen Wipplagerkopf gelagert ist, wobei eine Überwachungs- und/oder Sicherheitseinrichtung zum Überwachen und/oder Gewährleisten der Sicherheit des Steuerstands vorgesehen ist.
- Einen solchen Kran zeigt beispielsweise die Schrift
EP 27 19 652 A1 , die die Merkmale des Oberbegriffs des Anspruchs 1 offenbart, wobei dort ein Personenstand über eine Ausgleichswippe an zwei Hubseilen aufgehängt ist. Zwischen den beiden Hubseilen und der Ausgleichswippe ist jeweils eine Zugmesslasche vorgesehen, um die Hubseilkraft zu messen. - Höhenverstellbare Steuerstände können beispielsweise am Turm eines Krans längsverfahrbar und damit höhenverstellbar gelagert sein, wobei ein solcher Kranturm in an sich bekannter Weise einen Ausleger tragen kann, von dem ein Hubseil zu einem Lasthaken abläuft, gegebenenfalls über eine am Ausleger längsverfahrbare Laufkatze. Dabei kann der genannte Turm teleskopierbar und/oder wippbar an einem Oberwagen gelagert sein, der um eine aufrechte Achse auf einem am Boden verfahrbaren Unterwagen gelagert sein kann. Solche Krane werden bisweilen als mobiler Schnelleinsatzkran bezeichnet.
- Grundsätzlich kann der genannte Steuerstand aber auch an einem herkömmlichen Turmdrehkran vorgesehen sein, oder auch an einem anderen Krantyp, wobei der Steuerstand nicht zwangsweise verfahrbar an einem Turm gelagert sein muss, sondern auch in anderer Weise höhenverstellbar gelagert sein kann.
- Der Steuer- und/oder Personenstand ist dabei oft kabinenförmig bzw. als Kranführer- und/oder Liftkabine ausgebildet, wobei es vorteilhaft sein kann, wenn eine solche Kranführerkabine für verschiedene Hubaufgaben des Krans in unterschiedlichen Arbeitshöhen positioniert sein kann.
- Um die Sicherheit der höhenverstellbaren Steuerstände bzw. Liftkabinen zu gewährleisten, auch wenn bei der Höhenverstellung Personen wie der Kranführer mit befördert werden, sind besondere Sicherheitsmaßnahmen erforderlich. Zum einen ist dies das Vorsehen von zwei parallel geschalteten Hubelementen, um die nötige Redundanz erzielen zu können. Zum anderen wird aber die ordnungsgemäße Funktion der genannten Hubelemente und der Aufhängung des Steuerstands zusätzlich überwacht, um ein Fehlverhalten oder gar einen Bruch rechtzeitig erkennen zu können.
- Durch die Anlenkung der beiden Hubelemente an einer Ausgleichswippe kann zum einen der Verstellkomfort erhöht werden, da die genannte Ausgleichswippe die Hubkräfte der Hubelemente ausgleicht bzw. einen ruckelnden oder nicht vollständig synchronen Anfahrprozess in gewissem Maße ausgleichen kann. Die genannten Hubelemente können dabei Hubseile sein, die die Ausgleichswippe und damit den Steuerstand von oben her aufhängen. Grundsätzlich käme es aber auch in Betracht, Stellaktoren beispielsweise in Form von Druckmittelzylindern als Hubelemente zu verwenden, die die Ausgleichswippe in die gewünschte Stellung ziehen oder drücken können.
- Um Fehlfunktionen wie beispielsweise Schlappseil, Seilbruch, Seillängung oder eine Fehlspulung auf der Antriebsseiltrommel erkennen zu können, wurde bereits vorgeschlagen, die Winkelstellung der Ausgleichswippe durch mechanische Endschalter zu überwachen, die von einem Schwenkarm der Ausgleichswippe betätigt werden, wenn die Ausgleichswippe eine vorbestimmte Schwenk- bzw. Wippstellung erreicht. Die genannte Ausgleichswippe ist dabei in der Regel durch eine oder mehrere Federeinrichtungen in eine unausgelenkte Neutralstellung vorgespannt, sodass die genannte Ausgleichswippe nur bei größeren Ungleichmäßigkeiten in der Kraftbeaufschlagung durch die beiden Hubelemente auf- bzw. niederwippt und so stark rotatorisch ausgelenkt wird, dass die genannten Endschalter betätigt werden. Wird beispielsweise eines der Hubseile deutlich schneller aufgewickelt als das andere, verstellt sich die Ausgleichswippe zunehmend stärker, wobei durch einen ersten Endschalter beispielsweise ein vorkritischer Zustand angezeigt werden kann. Bildet sich an dem langsamer eingeholten Hubseil Schlappseil oder reißt eines der beiden Hubseile ganz, sodass nur noch das andere Hubseil die Ausgleichswippe und damit den Steuerstand trägt, wird es zu einer maximalen rotatorischen Auslenkung kommen, was durch einen weiteren Endschalter angezeigt werden kann.
- Andererseits soll auch eine "normale" Überbelastung der Liftkabine erfasst werden, beispielsweise wenn eine Person zu viel die Kabine bzw. den Stand besteigt oder eine Person einen zu schweren Ausrüstungsgegenstand mit sich führt, so dass die zulässige Traglast gegebenenfalls nur knapp überschritten wird. Da bei solchen knappen Überschreitungen die zuvor genannten Endschalter, die ein starkes Verkippen beim Reißen eines Hubseils anzeigen, nicht ansprechen, müssen weitere Sensoren angebracht werden, um einen solchen Überlastzustand erfassen zu können.
- Somit können durch geschickte Anordnung verschiedener mechanischer Endschalter verschieden kritische Zustände erfasst und angezeigt werden.
- Die bisherigen Sicherheits- und/oder Überwachungseinrichtungen sind jedoch relativ aufwändig. Sollen unterschiedlich kritische Zustände unterschieden werden, sind diverse mechanische Endschalter notwendig, wobei die Federbeaufschlagung der Ausgleichswippe entsprechend anzupassen ist. Zum anderen ist es auch bei komplexerer Konfiguration der Sicherheits- und/oder Überwachungseinrichtung bislang schwierig, die Überwachung ausreichend fein vorzunehmen, um rechtzeitig in die Steuerung des Krans eingreifen zu können.
- Der vorliegenden Erfindung liegt daher die Aufgabe zugrunde, einen verbesserten Kran der eingangs genannten Art zu schaffen, der Nachteile des Standes der Technik vermeidet und letzteren in vorteilhafter Weise weiterbildet. Insbesondere soll mit einfachen Mitteln eine feinfühlige Überwachung der Aufhängung und des Betriebs des höhenverstellbaren Steuer- und/oder Personenstands erreicht werden, die zwischen verschiedenen kritischen Zuständen unterscheiden kann, um nicht nur eine Notabschaltung zu ermöglichen, sondern der Steuervorrichtung des Krans Vorabmaßnahmen wie beispielsweise ein Gegensteuern des Ansteuern der Antriebe oder einen Wartungshinweis zu ermöglichen.
- Erfindungsgemäß wird die genannte Aufgabe durch einen Kran gemäß Anspruch 1 gelöst. Bevorzugte Ausgestaltungen der Erfindung sind Gegenstand der abhängigen Ansprüche.
- Es wird also vorgeschlagen, die Überwachung der Steuerstandaufhängung in die Schwenkachse zu integrieren, die die Ausgleichswippe wippbar an dem mit dem Steuerstand verbundenen Wipplagerteil lagert. Die Schwenkachse dient dabei einerseits der schwenkbaren Lagerung der Ausgleichswippe und bewirkt gleichzeitig eine Erfassung des Lastzustands an der Wippenlagerung, sodass die Schwenkachse eine Doppelfunktion erfüllt. Erfindungsgemäß ist die Schwenkachse als Messachse zum Erfassen des Belastungszustands der wippbaren Lagerung der Ausgleichswippe und Bereitstellen eines Belastungssignals an die Überwachungs-und/oder Sicherheitseinrichtung ausgebildet. Die genannte Messachse kann insbesondere als Kraftmessbolzen ausgebildet sein, der die Ausgleichswippe mit dem Wipplagerkopf schwenkbar verbindet und zumindest Querkräfte quer zur Schwenkachse erfasst.
- Dadurch dass die Schwenkachse kein normaler Achsbolzen ist, sondern gleichzeitig als Messbolzen bzw. Messachse dient, kann die Aufhängung des Steuerstands kompakter bauen und mit weniger Bauteilen auskommen. Gleichzeitig wird eine feinfühlige Erfassung der zwischen Ausgleichswippe und Wipplagerkopf wirkenden Kräfte ermöglicht.
- Um mit einer solchen einfachen Messachse zwischen einem normalen Überlastzustand beispielsweise zu viele Personen in der Kabine einerseits und einer mechanischen Unregelmäßigkeit an den Hubelementen und der Ausgleichswippe wie beispielsweise einem Seilbruch oder einer Fehlspulung andererseits unterscheiden zu können, kann in vorteilhafter Weiterbildung der Erfindung der Ausgleichswippe und/oder dem Wipplagerkopf und/oder der Messachse ein Hebelmechanismus zugeordnet sein, der ein vorbestimmtes Maß überschreitende Kippbewegungen der Ausgleichswippe und/oder des Wipplagerkopfes in eine spürbare bzw. erfassbare Veränderung der Belastung der Messachse bzw. der auf die Messachse wirkenden Lagerkräfte umsetzt. Der genannte Hebelmechanismus kann insbesondere dazu ausgebildet sein, ein Halte- und/oder Bremsmoment, das beim Aufhalten und/oder Bremsen einer Relativdrehung der Ausgleichswippe relativ zum Wipplagerkopf entsteht bzw. hierfür notwendig ist, in eine auf die Messachse wirkende Lagerkraft umzusetzen. Bricht beispielsweise eines der Hubseile bzw. -elemente, würde sich die Ausgleichswippe an sich so weit verdrehen, bis die vom verbleibenden Hubelement aufgebrachte Haltekraft lotrecht durch die Messachse geht. Wird nun aber die Verdrehung vorher gebremst bzw. aufgehalten, kann das hierfür notwendige Halte- bzw. Bremsmoment durch den genannten Hebelmechanismus in eine Kraft gewandelt werden, die die Belastung der Messachse signifikant verändert.
- Der genannte Hebelmechanismus kann insbesondere einen Schwenkbegrenzer umfassen, der eine bestimmte, im normalen Betrieb auftretende Verschwenkung zwischen Ausgleichswippe und Wipplagerkopf zulässt, jedoch bei Erreichen eines bestimmten Schwenkwinkels begrenzt und/oder abbremst, um das genannte Halte-und/oder Bremsmoment zu erzeugen und in eine Veränderung der Messachsenbelastung umzusetzen.
- In vorteilhafter Weiterbildung der Erfindung können an der Ausgleichswippe und dem Wipplagerkopf Schwenkanschläge vorgesehen sein, die die möglichen Schwenkbewegungen der Ausgleichswippe relativ zum Wipplagerkopf begrenzen. Insbesondere können die genannten Schwenkanschläge an der Ausgleichswippe und dem Wipplagerkopf derart angeordnet sein, dass die Schwenkanschläge in einer unausgelenkten Neutralstellung der Ausgleichswippe außer Eingriff sind und erst bei Erreichen einer vorbestimmten Schwenkstellung der Ausgleichswippe relativ zum Wipplagerkopf in Eingriff geraten und eine darüber hinausgehende, weitere Schwenkbewegung blockieren.
- Mittels solcher Schwenkanschläge können an der Messachse größere Veränderungen des Belastungszustandes erzeugt werden, wenn die Schwenkanschläge in Eingriff geraten, da sich durch deren Hebelwirkung der Belastungszustand an der Messachse ändert.
- Insbesondere kann mittels solcher Schwenkanschläge und die hierdurch erzeugten Veränderungen der Belastung an der Messachse bestimmt werden, welches Hubelement ausgefallen bzw. behindert ist oder allgemein, welche Qualität die Störung hat, auch wenn die Messachse nicht zur Erfassung der Richtung der Belastung ausgebildet ist, beispielsweise wenn die Messachse nicht rotatorisch festgelegt ist, was gleichwohl auch in Verbindung mit den Schwenkanschlägen möglich ist. Durch die bekannte Geometrie der Schwenkanschläge und der Anlenkung der Hubelemente sowie der Geometrie der Ausgleichswippe kann aufgrund der Veränderung des Lastzustands der Messachse rückgeschlossen werden, welche Veränderung sich an der Aufhängung ergeben hat.
- In vorteilhafter Weiterbildung der Erfindung können die genannten Schwenkanschläge auf einem Teilkreis um die Messachse herum angeordnet sein, insbesondere unmittelbar benachbart zum Außenumfang der genannten Messachse angeordnet sein, sodass sich durch einen relativ kurzen Hebelarm bezüglich der Schwenkachse größere Veränderungen des Belastungszustands einstellen, wenn über die Schwenkanschläge Kräfte übertragen werden.
- Vorteilhafterweise können die genannten Schwenkanschläge auf einem Teilkreis um die Messachse herum angeordnet sein, dessen Durchmesser kleiner als 300% oder auch kleiner als 200% oder kleiner als 150% des Außendurchmessers der genannten Messachse beträgt.
- In vorteilhafter Weiterbildung der Erfindung können die genannten Schwenkanschläge in einer liegenden Ebene, die sich quer zur Wirkachse der Hubelemente erstreckt, angeordnet sein. Insbesondere können bei Betrachtung in Richtung der Schwenkachse die genannten Schwenkanschläge im Bereich von etwa 2 Uhr bis 5 Uhr bzw. im Bereich von etwa 8 Uhr bis 10 Uhr angeordnet sein.
- Die Anordnung der Schwenkanschläge kann derart getroffen sein, dass die von den Schwenkanschlägen übertragenen Kräfte, wenn die Schwenkanschläge in Eingriff sind, näherungsweise in Richtung der Stellkräfte der Hubelemente und/oder der Gewichtskraft des Steuerstands verlaufen.
- Um zwischen verschiedenen kritischen Zuständen unterscheiden zu können, kann in Weiterbildung der Erfindung eine Auswerteeinrichtung zum Auswerten des Messsignals der Messachse vorgesehen sein, die dazu konfiguriert ist, verschiedene kritische Zustände der Aufhängung des Steuer- und/oder Personenstands anhand der Höhe und/oder einer Veränderung des Messsignals der Messachse zu bestimmen. Insbesondere kann die genannte Auswerteeinrichtung dazu ausgebildet sein, das Messsignal der Messachse mit unterschiedlichen Schwellwerten zu vergleichen, um den Lastzustand zu bestimmen, je nachdem, welcher Schwellwert überschritten bzw. unterschritten wird.
- Beispielsweise kann die Auswerteeinrichtung mit einem ersten Schwellwert arbeiten, der im Bereich der zulässigen Traglast des Steuer- und/oder Personenstands angesiedelt ist bzw. eine Belastung der Messachse charakterisiert, bei deren Unterschreiten von einem normalen Betriebszustand ausgegangen werden kann und bei deren Überschreiten von einer "normalen" Überschreitung der zulässigen Traglast ausgegangen werden kann. Mit anderen Worten kann der genannte erste Schwellwert einen Betriebszustand charakterisieren, in dem ein Übergang zwischen noch tolerierter Traglast und zu hoher Traglast auftritt, jedoch noch keine abnormale Verdrehung der Ausgleichswippe zum Wipplagerkopf aufgetreten ist.
- Alternativ oder zusätzlich kann die Auswerteeinrichtung das Messachsensignal mit einem zweiten Schwellwert vergleichen, der eine Belastung der Messachse charakterisiert, welche nur bei einer abnormalen Verdrehung der Ausgleichswippe zum Wipplagerkopf auftritt, insbesondere durch die genannte Schwenkbegrenzung, die das Verschwenken der Ausgleichswippe zum Wipplagerkopf begrenzt und die Gewichtsbelastung der Aufhängung durch die Gewichtskraft des Steuer- und/oder Personenstands einschließlich Beladung multipliziert.
- In Weiterbildung der Erfindung kann der genannte zweite Schwellwert mehr als 20% oder mehr als 40% über einer Belastung der Messachse liegen, die bei maximal zugelassener Beladung des Steuer- und/oder Personenstands bei nicht oder nur leicht ausgelenkter Ausgleichswippe bzw. bei ordnungsgemäßem Betriebszustand der Hubelemente auftritt. Durch ein solches Pufferfenster zwischen maximaler, normaler Traglast und überhöhter Belastung der Messachse durch übermäßige Auslenkung der Ausgleichswippe, wie sie bei Seilbruch oder Fehlspulung auftritt, kann die Auswerteeinrichtung sicher zwischen einer normalen Überbelastung durch zu viele Personen einerseits und einem Schaden der Aufhängung andererseits unterscheiden, ohne hierfür über die genannte Messachse hinaus weitere Sensoren zu benötigen.
- Die genannte Auswerteeinrichtung kann elektronisch ausgebildet sein, beispielsweise in der Messachsensensorik integrierte Schaltglieder umfassen. Alternativ oder zusätzlich kann die Auswerteeinrichtung auch Teil einer elektronischen Steuereinrichtung sein, die beispielsweise einen Prozessor und einen Speicher aufweisen kann, in welchem die genannten Schwellwerte ablegbar sein können. Beispielsweise kann die genannte Auswerteeinrichtung Teil der elektronischen Kransteuereinrichtung sein.
- Die genannte Messachse kann grundsätzlich verschieden ausgebildet sein, um die auf die Messachse wirkenden Querkräfte hinsichtlich Betrag und/oder Richtung zu erfassen. Beispielsweise kann der Messachse eine Erfassungseinrichtung zum Erfassen einer elastischen Verformung der Messachse zugeordnet sein. Beispielsweise können an der genannten Messachse ein oder mehrere Dehnungsmessstreifen angebracht werden, um Verformungen des Messbolzens zu erfassen.
- Alternativ oder zusätzlich kann die Messachse mit einer Oberflächenbeschichtung versehen sein, die bei Verformungen des Messbolzens eine Veränderung des elektrischen Widerstands zeigt. Eine solche Oberflächenbeschichtung kann beispielsweise in Form einer Dünnfilmbeschichtung bzw. in Form eines Dünnfilmsensors ausgebildet sein.
- Alternativ oder zusätzlich kann der Messachse eine Magnetfeld basierte Sensorik zugeordnet sein, um Verformungen und/oder Kraftbeaufschlagungen bzw. im Messbolzen wirkende Spannungen zu erfassen. Beispielsweise kann die Messachse als Eisenkern einer Transformatorschaltung dienen, sodass sich Dehnungen der Messachse auf die magnetischen Eigenschaften und damit die Spannung an einer Sekundärspule auswirken.
- Dabei kann die genannte Messachse drehfest an dem Wipplagerkopf befestigt sein, wobei die Ausgleichswippe verdrehbar zu der Messachse an der genannten Messachse gehalten sein kann. Alternativ wäre es auch möglich, die genannte Messachse drehfest an der Ausgleichswippe zu befestigen, sodass sie die Wippbewegungen der Ausgleichswippe mitmacht und sich gegenüber dem Wipplagerkopf verdreht.
- Durch Festlegen einer vorbestimmten rotatorischen Stellung der Messachse wäre es möglich, die Richtung der auf die Messachse wirkenden Kräfte zu bestimmen und/oder zu bestimmen, auf welchen Sektor der Messachse die Querkräfte zumindest überwiegend wirken. Aus der Information, auf welchen Sektor die Querkräfte wirken, könnte bestimmt werden, in welcher relativen Dreh- bzw. Wippstellung sich die Ausgleichswippe relativ zum Wipplagerkopf befindet. Aus der genannten Schwenkstellung von Ausgleichswippe und Wipplagerkopf relativ zueinander kann auf den Belastungszustand, insbesondere ungleiche Stellungen der beiden Hubelemente beispielsweise aufgrund asynchroner Verstellung rückgeschlossen werden.
- Grundsätzlich ist es aber nicht notwendig, die Messachse rotatorisch nicht festzulegen, beispielsweise dann, wenn lediglich eine absolute Überwachung des Betrags der von der Messachse übertragenen Kräfte zwischen Ausgleichswippe und Wipplagerkopf erfasst bzw. überwacht werden soll, beispielsweise um eine Überlastsicherung zu realisieren. Eine solche Überlastsicherung kann beispielsweise auslösen bzw. eingreifen, wenn zu viele Personen den Steuerstand betreten oder die Führung der Kranführerkabine klemmt.
- In vorteilhafter Weiterbildung der Erfindung kann der genannte Wipplagerkopf starr mit dem Steuerstand verbunden sein. Vorteilhafterweise kann der genannte Wipplagerkopf unmittelbar am Chassis des Steuerstands befestigt sein. Grundsätzlich wäre es aber auch möglich, den genannten Wipplagerkopf mittelbar an dem Steuerstand anzulenken, beispielsweise über eine Lenkeranordnung, die den Wipplagerkopf am Steuerstand hält.
- Die genannten Hubelemente sind in Weiterbildung der Erfindung biegeschlaffe Zugelemente insbesondere in Form von Hubseilen. Denkbar sind auch Zugketten oder Riemen.
- Alternativ können die genannten Hubelemente aber auch in Form von Stellaktoren wie beispielsweise Hydraulikzylindern ausgebildet sein, wobei in diesem Fall auch eine Druckbeaufschlagung der Ausgleichswippe beispielsweise im Sinne von nach oben gehenden Druckkräften möglich wäre.
- Nachfolgend wird die vorliegende Erfindung anhand eines bevorzugten Ausführungsbeispiels und zugehöriger Zeichnungen näher erläutert. In den Zeichnungen zeigen:
- Fig. 1:
- eine schematische Seitenansicht eines als Turmdrehkran ausgebildeten Schnelleinsatzkrans nach einer vorteilhaften Ausführung der Erfindung, dessen Kranführerkabine am Turm des Krans höhenverstellbar gelagert ist,
- Fig. 2:
- eine perspektivische Darstellung der Kranführerkabine aus
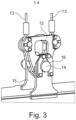
Figur 1 und deren Aufhängung, - Fig. 3:
- eine perspektivische Darstellung der Aufhängung der Kranführerkabine aus
Figur 2 , die die Ausgleichswippe mit den beiden daran angelenkten Hubseilen sowie die Messachse zeigt, durch die die Ausgleichswippe schwenkbar am Wipplagerkopf der Aufhängung angelenkt ist, - Fig. 4:
- eine Draufsicht auf die Ausgleichswippe und die Messachse der Aufhängung aus den vorhergehenden Figuren, wobei die Ausgleichswippe in einer unausgelenkten Neutralstellung gezeigt ist, in der die Schwenkanschläge außer Eingriff sind, und
- Fig. 5:
- eine Draufsicht auf die Ausgleichswippe und die Messachse ähnlich Figur 4, wobei die Ausgleichswippe in einem durch Bruch oder Schlaffseil eines der Hubseile verdrehten Stellung gezeigt ist, in der die Schwenkanschläge in Eingriff gekommen sind.
- Wie
Figur 1 zeigt, kann der Kran 1 als Turmdrehkran ausgebildet sein und einen Turm 2 aufweisen, der im Betrieb aufrecht steht und einen auskragenden Ausleger 3 trägt. Der Turm 2 kann mit seinem unteren Ende auf einer Drehbühne 4 sitzen, die um eine aufrechte Achse drehbar und auf einem Unterwagen 5 abgestützt ist, der als Lastwagen oder in anderer Weise verfahrbar ausgebildet sein kann, jedoch gegebenenfalls auch eine starre, nicht verfahrbare Abstützbasis bilden kann. - An dem Ausleger 3 kann eine Laufkatze 7 längsverfahrbar gelagert sein, die mittels eines Katzfahrseils 8 hin und her verfahren werden kann. Über die Laufkatze 7 kann ein Hubseil 6 mit einem Lasthaken ablaufen.
- Der Kran 1 umfasst einen Steuer- und/oder Personenstand 9, der als Kranführer- bzw. Liftkabine 10 ausgebildet sein kann. Der genannte Steuer- und/oder Personenstand 9 ist dabei höhenverstellbar gelagert. Insbesondere kann die genannte Kranführer- bzw. Liftkabine 10 an dem Turm 2 längsverfahrbar gelagert sein, beispielsweise durch ein Kabinenfahrwerk, das am Turmprofil, beispielsweise dessen Längsgurte geführt ist.
- Wie die
Figuren 2 bis 5 zeigen, kann der Steuer- und/oder Personenstand 9 über eine Aufhängung 11 gehalten und in verschiedene Höhenstellungen gebracht werden, die am Chassis, insbesondere an der Oberseite der Kranführer- bzw. Liftkabine 10 angreifen kann. Die genannte Kabine 10 kann dabei an einer Außenseite des Turms 2 auf- und abgefahren werden, beispielsweise mittels einer Rollenführung oder Schienenführung entlang des Turms. Gegebenenfalls kann die Kabine aber auch im Inneren des Turmprofils angeordnet sein, beispielsweise wenn sie nur als Aufstiegshilfe zum Erreichen des Auslegers oder eines oben angeordneten Steuerstands genutzt wird und das Turmprofil ausreichend voluminös ist. - Die genannte Aufhängung 11 kann insbesondere eine Ausgleichswippe 12 umfassen, an der zwei Hubelemente 13 in Form von Hubseilen angelenkt sein können, die über einen geeigneten Hubwerksantrieb angehoben und abgelassen werden können. Beispielsweise können zwei Seiltrommeln vorgesehen sein, die die beiden Hubseile aufwickeln und abspulen können.
- Die genannte Ausgleichswippe 12 ist mittels einer Schwenkachse 14, die sich liegend erstreckt und an einem Mittelabschnitt der Ausgleichswippe 12 angreift, schwenkbar an einem Wipplagerkopf 15 gelagert, der starr mit dem Steuerstand 9 verbunden, insbesondere am Chassis der Kabine 10 befestigt sein kann.
- Wie die
Figur 3 zeigt, kann der genannte Wipplagerkopf 15 beispielsweise ein Lagerjoch bilden, zwischen dessen Schenkel die Ausgleichswippe 12 mit einem Lagerabschnitt eintaucht, wobei die Schenkel des Wipplagerkopfs 15 und der Lagerabschnitt der Ausgleichswippe 12 fluchtende Schwenklagerbohrungen aufweisen können, durch die sich die genannte Schwenkachse 14 erstreckt. Grundsätzlich wäre es aber auch möglich, die Anordnung umzudrehen, beispielsweise am Lagerabschnitt der Ausgleichswippe 12 zwei Jochschenkel vorzusehen, zwischen denen sich der Wipplagerkopf 15 erstreckt. Weitere Ausbildungen beispielsweise nach Art einer auskragenden Schwenklagerverbindung wären auch möglich. - Die genannte Schwenkachse 14 ist dabei als Messachse 16 ausgebildet, um auf die Schwenkachse 14 wirkende Querkräfte erfassen zu können. Die genannte Messachse 16 kann dabei nach Art eines Kraftmessbolzens ausgebildet sein, wobei an der Messachse 16 eine geeignete Sensorik vorgesehen sein kann, die die genannten Lagerkräfte und Belastungen, die auf den Bolzen wirken, erfassen kann. Wie eingangs erwähnt, kann die genannte Sensorik 17 beispielsweise Dehnungsmessstreifen an der Messachse oder eine darauf aufgebrachte Dünnfilmbeschichtung umfassen, um Verformungen und damit Belastungen messen zu können.
- Wie ein Vergleich der
Figuren 4 und 5 zeigt, kann die genannte Messachse 16 drehfest an dem Wipplagerkopf 15 gehalten sein, sodass sie Drehbewegungen der Ausgleichswippe 12 nicht mitmacht. Alternativ kann die Messachse 16 auch verdrehbar zum Wipplagerkopf 15 und/oder zur Ausgleichswippe 12 gelagert sein, so dass sie keine vorgegebene rotatorische Lage einnimmt. - Die Verschwenkbarkeit der Ausgleichswippe 12 relativ zum Wipplagerkopf 15 kann vorteilhafterweise durch Schwenkanschläge 18 begrenzt sein, die an der Ausgleichswippe 12 und dem Wipplagerkopf 15 vorgesehen sein können. Insbesondere können die genannten Schwenkanschläge 18 um die Schwenkachse 14 herum unmittelbar in Nachbarschaft zu deren Außenumfang angeordnet sein, also insbesondere um die Lagerbohrungen herum, durch die sich die Schwenkachse 14 erstreckt.
- Beispielsweise können die genannten Schwenkanschläge 18 durch Vorsprünge gebildet sein, die an der Ausgleichswippe 12 und dem Wipplagerkopf 15 ausgebildet sind, um miteinander zu kollidieren, wenn die Ausgleichswippe 12 relativ zum Wipplagerkopf 15 schwenkt.
- Wie die
Figuren 4 und 5 zeigen, können die genannten Schwenkanschläge 18 dabei in einer unausgelenkten Neutralstellung der Ausgleichswippe 12, die inFigur 4 gezeigt ist, außer Eingriff voneinander sein, sodass sich die Ausgleichswippe 12 aus der Neutralstellung heraus unbehindert drehen kann. Andererseits geraten die Schwenkanschläge 18 in Eingriff, wenn die Ausgleichswippe eine vorbestimmte Schwenkbewegung ausgeführt hat, beispielsweise um einen Winkel von etwa +/-10° bis +/-20°. - Geraten die Schwenkanschläge 18 miteinander in Eingriff, wie dies
Figur 5 zeigt, beispielsweise weil eines der Hubelemente 13 gebrochen ist oder zu weit abgespult wurde, ändert sich der Belastungszustand an der Messachse 16 signifikant. Die exzentrisch angeordneten Schwenkanschläge 18 und die dadurch übertragenen Kräfte, wirken auf die Schwenkachse 14 zusätzliche Kräfte, die die Hebelsituation ausgleichen müssen. Die an der Messachse 16 erfassten Belastungen, insbesondere Querkräfte und/oder Biegemomente erfahren eine signifikante Änderung, sobald die Schwenkanschläge 18 in Eingriff geraten. Diese Änderung kann grundsätzlich eine Entlastung oder zusätzliche Belastung sein, die an der Messachse erfasst werden kann. - Vorteilhafterweise sind die genannten Schwenkanschläge 18 so ausgebildet, dass an den in Eingriff stehenden Anschlagsflächen Eingriffskräfte entstehen, die bezüglich der Schwenkachse 14 exzentrisch sind und/oder einen Hebelarm haben, um eine Reaktion in der Messachse zu erzeugen. Insbesondere kann eine resultierende Eingriffskraft bei in Eingriff befindlichen Schwenkanschlägen exzentrisch zur Messachse wirken.
- Wie die
Figuren 4 und 5 zeigen, können die Schwenkanschläge 18 zwei Paare von Schwenkanschlägen 18 umfassen, die auf gegenüberliegenden Seiten der Messachse 16 angeordnet sind, vorzugsweise etwa - zumindest näherungsweise - in einer Ebene, die sich liegend durch die Schwenkachse 14 erstreckt. Beispielsweise können sich die Schwenkanschläge 18 in einem Bereich von 2 Uhr bis 4 Uhr bzw. 8 Uhr bis 10 Uhr erstrecken, wenn die Schwenkachse 14 in ihrer Achsrichtung betrachtet wird. - Die Schwenkanschläge 18 sind dabei vorteilhafterweise derart angeordnet, dass je nach Kippbewegung der Ausgleichswippe immer nur ein Anschlagspaar auf einer Seite der Schwenkachse 14 in Eingriff kommt.
- Die Schwenkanschläge 18 bilden einen Hebelmechanismus, der das beim Begrenzen der Verschwenkbewegung der Ausgleichswippe 12 auftretende Drehmoment bzw. Haltemoment in eine signifikante Veränderung der Belastung der Messachse 16 umsetzt. Insbesondere kann der von den Schwenkanschlägen 18 gebildete Hebelmechanismus die von der Kabine in die Aufhängung eingeleitete Last multiplizieren, so dass die Belastung der Messachse 16 deutlich ansteigt, insbesondere sehr viel stärker ansteigt als dies der Fall wäre, wenn die zulässige Traglast nur leicht überschritten wird, beispielsweise wenn eine zusätzliche Person einsteigt.
- Wie
Fig. 5 zeigt, ergeben sich dann, wenn ein Schwenkanschlagspaar bei entsprechend weiter Verdrehung der Ausgleichswippe in Eingriff gerät, einerseits ein Hebelarm der Messachse bzw. der durch die Messachse gehenden Kabinenlast zu dem in Eingriff befindlichen Schwenkanschlagspaar und andererseits ein Hebelarm des noch tragenden Seils 13 zu dem Schwenkanschlagspaar 18, wobei die genannten Hebelarme jeweils im Wesentlichen dem horizontalen Abstand zwischen dem Zentrum der Messachse und dem Eingriffspunkt der Schwenkanschläge einerseits bzw. der Wirklinie der Seilzugkraft und dem Eingriffspunkt der Schwenkanschläge 18 andererseits entsprechen können. - Da die Seilkraft im noch tragenden Seil 13 der Last der Kabine nebst Zuladung und Anbauteilen entspricht, damit sich ein vertikales Kräftegleichgewicht ergeben kann, kann durch die Länge der genannten Hebelarme die Veränderung der sich an der Messachse einstellenden Belastung gesteuert werden.
- Beispielsweise kann die Länge der genannten Hebelarme durch entsprechende Ausbildung der Geometrie der Ausgleichswippe und des Wipplagerkopfes, insbesondere des Anlenkpunkts der Hubelemente 13 an der Ausgleichswippe und der Anordnung der Schwenkanschläge 18, derart ausgebildet sein, dass die an der Messachse 16 auftretende und damit gemessene Belastung um 50% oder mehr ansteigt, wenn durch entsprechende Verschwenkung der Ausgleichswippe 12 die genannten Schwenkanschläge 18 in Eingriff geraten. Wiegt beispielsweise die Kabine 10 nebst zulässiger, maximaler Beladung 1000 kg, können die genannten Hebelarme so eingestellt sein, dass eine Belastung von 1500 kg an der Messachse 16 auftritt, wenn die Schwenkanschläge 18 in Eingriff geraten. Insofern kann leicht zwischen einer normalen Überbelastung und einem Seilbruch oder einer Fehlspulung unterschieden werden, beispielsweise wenn ein erster Schwellwert von 1050 kg überschritten und ein zweiter Schwellwert von beispielsweise 1400 kg noch nicht überschritten ist, so dass von einer normalen Überladung bei noch funktionsfähiger Aufhängung ausgegangen werden kann, während bei einer Überschreitung des genannten zweiten Schwellwerts von beispielsweise 1400 kg dann von einem Seilbruch oder einer Fehlspulung ausgegangen werden kann. Die genannten Werte sind lediglich beispielhaft zu verstehen.
- Die der Messachse 16 zugeordnete Sensorik 17 gibt ein Belastungssignal ab, welches die Belastungssituation an der Messachse 16 charakterisiert, insbesondere die dort anfallenden Querkräfte hinsichtlich ihres Betrags und/oder hinsichtlich ihrer Richtung angibt.
- Das genannte Belastungssignal der Sensorik 17 kann von einer Steuervorrichtung 20 des Krans 1 ausgewertet werden, welche Steuervorrichtung 20 elektronisch ausgebildet und beispielsweise einen Mikroprozessor umfassen kann, der ein in einem Speicher abgelegtes Steuerungsprogramm abarbeiten kann.
- Die genannte Steuervorrichtung 20 kann eine Auswerteeinrichtung 19 aufweisen, die das Messsignal der Messachse 16 in der genannten Weise auswertet, insbesondere mit zwei Schwellwerten vergleicht, die einerseits den normalen Übergang von normaler, zulässiger Traglast zu einer Überladung charakterisieren und andererseits den Eingriff der Schwenkanschläge 18 und die damit einhergehende Veränderung der Belastung der Messachse charakterisiert.
- Die genannte Steuervorrichtung 20 kann dabei zum einen ein Warnsignal abgeben und/oder zumindest einen Antrieb des Krans stillsetzen, insbesondere den Hubwerksantrieb für die Höhenverstellung des Steuerstandes 9, wenn das Belastungssignal der Sensorik 17 einen außergewöhnlichen Belastungszustand angibt, beispielsweise übermäßige Querkräfte an der Messachse.
- Alternativ oder zusätzlich kann die genannte Steuervorrichtung 20 aber gegebenenfalls auch vorbeugend in die Ansteuerung der Antriebe eingreifen. Stellt die Sensorik 17 beispielsweise fest, dass sich die Ausgleichswippe zu stark verkippt, kann die Steuervorrichtung 20 versuchen, den Hubwerksantrieb, von dem das zu schlaffe oder das zu straffe Hubseil abläuft, nachzusteuern.
- Alternativ oder zusätzlich kann die Steuervorrichtung 20 auch ein vorbeugendes Wartungssignal abgeben, wenn die Belastungssignale der Sensorik 17 zwar noch keinen kritischen Zustand angeben, allerdings bereits signifikante Änderungen gegenüber dem ursprünglichen Lastkollektiv bei Neuzustand zeigen.
Claims (15)
- Kran, insbesondere Schnelleinsatzkran umfassend einen teleskopier-und/oder wippbaren Turm (2), mit einem höhenverstellbar gelagerten Steuer-und/oder Personenstand (9), der durch zwei Hubelemente (13) anhebbar und absenkbar ist, wobei die beiden Hubelemente (13) an einer Ausgleichswippe (12) angelenkt sind, die um eine liegende Schwenkachse (14) wippbar an einem mit dem Steuer- und/oder Personenstand (9) verbundenen Wipplagerkopf (15) gelagert ist, wobei eine Überwachungs- und/oder Sicherheitseinrichtung (21) zum Überwachen des Steuer- und/oder Personenstands (9) vorgesehen ist, dadurch gekennzeichnet, dass die Schwenkachse (14) als Messachse (16) zum Erfassen des Belastungszustands der wippbaren Lagerung der Ausgleichswippe (12) und Bereitstellen eines Belastungssignals an die Überwachungs- und/oder Sicherheitseinrichtung (21) ausgebildet ist.
- Kran nach dem vorhergehenden Anspruch, wobei der Ausgleichswippe (12) und/oder dem Wipplagerkopf (15) und/oder der Messachse (16) ein Hebelmechanismus zum Erzeugen einer auf die Messachse (16) wirkenden Veränderung der Messachsenbelastung in Abhängigkeit einer Verdrehung der Ausgleichswippe (12) relativ zum Wipplagerkopf (15) zugeordnet ist, wobei der genannte Hebelmechanismus dazu ausgebildet ist, ein beim Begrenzen und/oder Abbremsen der Verdrehung der Ausgleichswippe (12) gegenüber dem Wipplagerkopf (15) auftretendes Halte- und/oder Bremsmoment in eine auf die Messachse (16) wirkende Last umzusetzen.
- Kran nach einem der vorhergehenden Ansprüche, wobei an der Ausgleichswippe (12) und dem Wipplagerkopf (15) Schwenkanschläge (18) vorgesehen sind, die in einer unausgelenkten Neutralstellung der Ausgleichswippe (12) außer Eingriff sind und bei Erreichen einer vorbestimmten Schwenkstellung der Ausgleichswippe (12) in Eingriff geraten und eine weitere Schwenkbewegung der Ausgleichswippe (12) relativ zum Wipplagerkopf (15) blockieren, wobei die Schwenkanschläge (18) auf einem Teilkreis um die Messachse (16) herum und/oder benachbart zum Außenumfang der Messachse (16) angeordnet sind, wobei der genannte Teilkreis einen Durchmesser von weniger als 300% oder weniger als 200% des Außendurchmessers der Messachse (16) aufweist.
- Kran nach einem der Ansprüche 2 bis 3, wobei die Schwenkanschläge (18) in einer liegenden Ebene quer zur Wippachse der Hubelemente (13) angeordnet sind.
- Kran nach einem der Ansprüche 2 bis 4, wobei die Schwenkanschläge (18) dazu ausgebildet sind, in ihrer Eingriffsstellung eine resultierende Anschlagskraft zu erzeugen, die exzentrisch zur Drehachse (14) wirkt.
- Kran nach einem der vorhergehenden Ansprüche, wobei eine Auswerteeinrichtung (19) zum Auswerten des Messsignals der Messachse (16) vorgesehen ist, wobei die genannte Auswerteeinrichtung (19) dazu ausgebildet ist, anhand einer Höhe und/oder einer Veränderung des Messsignals der Messachse (16) zwischen einer Überladung des Steuer- und/oder Personenstands (9) bei bestimmungsgemäßem Betriebszustand der Hubelemente (13) und der Ausgleichswippe (12) einerseits und einer Betriebsstörung der Hubelemente (13) und/oder der Ausgleichswippe (12) andererseits zu unterscheiden.
- Kran nach dem vorhergehenden Anspruch, wobei die genannte Auswerteeinrichtung (19) dazu ausgebildet ist, das Messsignal der Messachse (16) mit zwei verschiedenen Schwellwerten zu vergleichen, von denen ein erster die Belastung der Messachse (16) beim Übergang zwischen maximal zulässiger Belastung und Überbelastung des Steuer- und/oder Personenstands (9) bei bestimmungsgemäßem Betriebszustand der Hubelemente (13) und der Ausgleichswippe (12) charakterisiert und ein zweiter eine Zunahme der Belastung der Messachse (16) bei übermäßiger Auslenkung der Ausgleichswippe (12) aus deren Neutralstellung charakterisiert.
- Kran nach einem der vorhergehenden Ansprüche, wobei die Messachse (16) drehfest an dem Wipplagerkopf (15) befestigt ist und die Ausgleichswippe (12) verdrehbar zur Messachse (16) an der genannten Messachse (16) gehalten ist.
- Kran nach einem der vorhergehenden Ansprüche, wobei die Messachse (16) zum Erfassen von Querkräften auf die Messachse (16) hinsichtlich Betrag und/oder Richtung ausgebildet ist.
- Kran nach einem der vorhergehenden Ansprüche, wobei die Messachse (16) zum Erfassen von Biegemomenten auf die Messachse ausgebildet ist.
- Kran nach einem der vorhergehenden Ansprüche, wobei die Messachse (16) eine Sensorik (17) umfassen, zumindest einen Dehnungsmessstreifen und/oder eine dehnungsempfindliche Dünnfilmbeschichtung und/oder eine Magnetfeld basierte Sensoranordnung aufweist.
- Kran nach einem der vorhergehenden Ansprüche, wobei der Wipplagerkopf (15) starr an dem Steuer- und/oder Personenstand (9) befestigt ist.
- Kran nach einem der vorhergehenden Ansprüche, wobei die zumindest zwei Hubelemente (13) jeweils als biegeschlaffe Zugelemente, insbesondere Hubseile, ausgebildet sind.
- Kran nach einem der vorhergehenden Ansprüche, wobei die Ausgleichswippe (12) mit ihren Anlenkpunkten der Hubelemente (13) und der Schwenkachse (14) ein Dreieck definiert, wobei vorzugsweise eine Verbindungsgerade durch die Anlenkpunkte der Hubelemente (13) oberhalb der Schwenkachse (14) angeordnet ist.
- Kran nach dem vorhergehenden Anspruch, wobei die Schwenkachse (14) in der unausgelenkten Neutralstellung der Ausgleichswippe (12) mittig zwischen den Anlenkpunkten der Hubelemente (13) an der Ausgleichswippe (12) positioniert ist.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102019107142 | 2019-03-20 | ||
| DE102019126687.4A DE102019126687A1 (de) | 2019-03-20 | 2019-10-02 | Kran |
| PCT/EP2020/055951 WO2020187599A1 (de) | 2019-03-20 | 2020-03-06 | Kran |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3935002A1 EP3935002A1 (de) | 2022-01-12 |
| EP3935002B1 true EP3935002B1 (de) | 2024-12-11 |
Family
ID=72334305
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20711085.9A Active EP3935002B1 (de) | 2019-03-20 | 2020-03-06 | Kran |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3935002B1 (de) |
| CN (1) | CN113677614B (de) |
| DE (1) | DE102019126687A1 (de) |
| WO (1) | WO2020187599A1 (de) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11964850B2 (en) | 2019-03-20 | 2024-04-23 | Liebherr-Werk Biberach Gmbh | Crane |
| CN113816247B (zh) * | 2021-08-31 | 2025-04-01 | 无锡三立轴承股份有限公司 | 一种轴承旋转精度测量辅助提升装置 |
| DE102022106389A1 (de) * | 2022-03-18 | 2023-09-21 | Sec Ship's Equipment Centre Bremen Gmbh & Co. Kg | Vorrichtung zum anbringen von laschmitteln für container an einem fahrzeug |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2011143533A (ru) * | 2011-10-27 | 2012-02-10 | Владимир Алексеевич Небольсин (RU) | Башенный подъемный кран с пассажирским лифтом |
| EP2719652B1 (de) * | 2012-10-15 | 2015-05-06 | Liebherr-Werk Ehingen GmbH | Vorrichtung zur Beförderung von Personen mittels eines Krans, und Kran mit einer Vorrichtung zur Beförderung von Personen |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2172050B1 (de) * | 1972-02-16 | 1977-12-23 | Potain Sa | |
| DD154164A3 (de) * | 1979-12-18 | 1982-03-03 | Edgar Koop | Ueberwachungseinrichtung fuer tragseile an aufzuegen |
| DD254567A1 (de) * | 1986-12-11 | 1988-03-02 | Saechsischer Bruecken Und Stah | Seilausgleichswippe mit abschaltfunktion bei schlaffseil |
| CN101244793B (zh) * | 2007-03-30 | 2011-08-31 | 上海港务工程公司 | 单臂双吊钩起重船起重用超载超差测定报警装置及其测定方法 |
| US10099904B1 (en) * | 2017-05-25 | 2018-10-16 | James Zaguroli, Jr. | Safety arrangement for a hoist |
-
2019
- 2019-10-02 DE DE102019126687.4A patent/DE102019126687A1/de active Pending
-
2020
- 2020-03-06 CN CN202080021697.4A patent/CN113677614B/zh active Active
- 2020-03-06 WO PCT/EP2020/055951 patent/WO2020187599A1/de not_active Ceased
- 2020-03-06 EP EP20711085.9A patent/EP3935002B1/de active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2011143533A (ru) * | 2011-10-27 | 2012-02-10 | Владимир Алексеевич Небольсин (RU) | Башенный подъемный кран с пассажирским лифтом |
| EP2719652B1 (de) * | 2012-10-15 | 2015-05-06 | Liebherr-Werk Ehingen GmbH | Vorrichtung zur Beförderung von Personen mittels eines Krans, und Kran mit einer Vorrichtung zur Beförderung von Personen |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113677614B (zh) | 2024-06-11 |
| WO2020187599A1 (de) | 2020-09-24 |
| DE102019126687A1 (de) | 2020-09-24 |
| CN113677614A (zh) | 2021-11-19 |
| EP3935002A1 (de) | 2022-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3259222B1 (de) | Kran mit verstelleinheit zum beeinflussen einer verformung des auslegersystems | |
| EP3935002B1 (de) | Kran | |
| EP2684834B1 (de) | Hubtischsteuerung | |
| EP3256414B1 (de) | Kran sowie verfahren zum überwachen der überlastsicherung eines solchen krans | |
| EP3256415B1 (de) | Kran sowie verfahren zum überwachen der überlastsicherung eines solchen krans | |
| EP3038968B1 (de) | Vorrichtung zur erkennung der ablegereife eines hochfesten faserseils beim einsatz an hebezeugen | |
| EP3038966B1 (de) | Drallfänger | |
| EP2288563A1 (de) | Aufzugsanlage mit unterspannmittel | |
| EP2719652B1 (de) | Vorrichtung zur Beförderung von Personen mittels eines Krans, und Kran mit einer Vorrichtung zur Beförderung von Personen | |
| EP3356279B1 (de) | Trommelförderanlage mit seilüberwachungseinrichtung | |
| WO2019179870A1 (de) | Gefederte hebevorrichtung für einen kran | |
| EP3532425B1 (de) | Vorrichtung zur kompensation von schrägzug bei kranen | |
| WO2018145806A1 (de) | Hebezeug und verfahren zum anfahren des hubwerks eines solchen hebezeugs | |
| DE102022132028B3 (de) | Kran mit Abspannbock und Verfahren zum Abspannen eines solchen | |
| EP1460025B1 (de) | Hebezeug mit zwei Lastseilen | |
| AT503455B1 (de) | Statische treibfähigkeitsprüfung | |
| EP3375686A1 (de) | Vorrichtung und verfahren zur überwachung einer luftseilbahnanlage | |
| DE60320241T2 (de) | Kran mit einer Seilwinde und mit einer Zugsteuereinrichtung | |
| US11964850B2 (en) | Crane | |
| WO2019121990A1 (de) | Messeinrichtung zur lastmessung bei einem hebezeug | |
| EP2759510B1 (de) | Bauarbeitsgerät und Verfahren zum Betreiben eines Bauarbeitsgeräts | |
| EP2407412A1 (de) | Sicherheitssystem für eine Laufkatze eines Krans | |
| DE102022104832A1 (de) | Verfahren zur Überprüfung wenigstens eines sicherheitsrelevanten Kennwerts einer Aufzugsanlage | |
| DE102023123025A1 (de) | Verfahren zur Traglastüberwachung eines Krans mit zwei Lastaufnahmemitteln | |
| WO2022144322A1 (de) | Aufhängevorrichtung und deren verwendung in einer aufzugsanlage und verfahren |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20211007 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20240717 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Free format text: CASE NUMBER: APP_62947/2024 Effective date: 20241127 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502020009939 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250331 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250311 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250312 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250311 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250411 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250411 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20250401 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502020009939 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: L10 Free format text: ST27 STATUS EVENT CODE: U-0-0-L10-L00 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20251022 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250306 |
|
| 26N | No opposition filed |
Effective date: 20250912 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20250311 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20250331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250311 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250306 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: U11 Free format text: ST27 STATUS EVENT CODE: U-0-0-U10-U11 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20260401 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20260319 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20260330 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20260330 Year of fee payment: 7 |