EP2719652A1 - Vorrichtung zur Beförderung von Personen mittels eines Krans, und Kran mit einer Vorrichtung zur Beförderung von Personen - Google Patents
Vorrichtung zur Beförderung von Personen mittels eines Krans, und Kran mit einer Vorrichtung zur Beförderung von Personen Download PDFInfo
- Publication number
- EP2719652A1 EP2719652A1 EP13004922.4A EP13004922A EP2719652A1 EP 2719652 A1 EP2719652 A1 EP 2719652A1 EP 13004922 A EP13004922 A EP 13004922A EP 2719652 A1 EP2719652 A1 EP 2719652A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- crane
- connecting element
- regulation
- basket
- work basket
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C15/00—Safety gear
- B66C15/02—Safety gear for retaining load-engaging elements in the event of rope or cable breakage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/36—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes mounted on road or rail vehicles; Manually-movable jib-cranes for use in workshops; Floating cranes
- B66C23/52—Floating cranes
Definitions
- the invention relates to a device for transporting persons by means of a crane and a crane with the device.
- the object of the present invention is therefore to provide a device for transporting persons by means of a crane, which has redundant carrying means.
- a device for transporting persons with the features of claim 1.
- a device for transporting persons by means of a crane comprising a crane boom, a crane control, a first hoist rope, a second hoist rope, a roller head and a guide roller, wherein a work basket is connected via a connecting element with the two hoisting ropes.
- the provision of two hoisting ropes is a basic prerequisite for complying with the corresponding machinery directive. In this way it can be ensured that in the event of failure of one of the support means, the remaining suspension means prevents a crash of the work basket and thus endanger the passengers transported.
- the support means can be performed independently via roller head and pulley.
- a crane equipped with the device according to the invention makes it possible to transport both personnel and material. This means that, if necessary, not both crane and, for example, an aerial work platform must be provided, but the tasks of material and passenger transport can be taken over by the same device.
- the crane boom can be designed as desired. Possible are telescopic booms, lattice booms or grid elements, with or without folding tip, luffing tip or fixed point. Furthermore, a short tip can be provided on the crane, wherein then, for example, the second hoist rope can be feasible over this short tip.
- the two ropes are adjusted at different speeds because of different winding speeds of the ropes of cable drums.
- the connecting element comprises an angle transmitter, which communicates via a cable with the crane control / regulation and can be supplied with energy.
- a deviation of the orientation of the connecting element from the horizontal can be determined by the angle encoder, communicable to the crane control / regulation and correctable by the crane control / regulation.
- the two hoisting ropes of two different drives wound at different speeds it is possible to have the two hoisting ropes of two different drives wound at different speeds as needed. It is possible to run the drive of a hoist rope as a 'master' and track the drive of the other hoist rope as a "slave" only.
- the connecting element may be designed as a rocker, which is tiltable about a horizontal axis, wherein the horizontal axis is in alignment with the first hoist rope and wherein a spring shock absorber is connected to the rocker whose spring force is dimensioned such that the rocker is horizontally aligned at a certain tensile force in the second hoist rope.
- the annular surface of the cylinder is provided with a hydraulic lock, so that in case of leakage of the piston seal, the rod surface takes over the load. Since the rod surface is smaller than the piston surface, the pressure increases in the ratio of the surfaces.
- the pipe walls are dimensioned accordingly.
- a crane control / regulation can be provided with an operating unit in the area of a crane driver's stand. It is also possible that another or additional control unit is present, which is not localized and can communicate via radio or by cable with the crane control / regulation.
- the device in the region of the work basket comprises an operating unit for operating the crane control / regulation. This is particularly advantageous in situations in which people who are in the work basket control the crane movement. This may be the case, for example, when the work basket is moved within a structure, such as a chimney, which is not visible by a crane positioned outside thereof.
- the maneuverability of the working basket itself depends inter alia on the positionability of the crane jib, the cable guide and the connection of the work basket to the suspension elements. While doing the vertical and horizontal positioning of the work basket can be adjusted significantly above the crane boom and the cable guide, it may be appropriate to adjust the setting of Position of the work basket to allow a vertical rotation axis of the work basket.
- a rotary connection with securing between the connecting element and the working basket is provided in the device. It is also advantageous if in this case this rotary joint can be set in rotation by means of a drive, wherein the drive can also be supplied with energy via the cable and can be connected to the operating unit and / or the crane control / regulation in connection therewith.
- Such a rotary connection makes it possible, especially in work baskets with a rectangular base to rotate the work basket in a desired position in which the work basket is aligned, for example, along a structure to which the staff would like to gain access.
- a rotary joint for aligning the working basket is not necessary and thus can be omitted.
- At least one stroke limit switch is provided in the region of the roller head and the deflection roller, by means of which the maximum lifting height of the device can be limited.
- the Hubendschalter brakes while the cable movement when a corresponding structure in the region of the work basket exerts a force on the Hubendschalter. In this way, it can be ensured that, in the event of a faulty control, the work basket or the device elements connected to the work basket do not conflict with the crane boom or the elements connected to it.
- the crane control / regulation based on the lack of force in the drive of a broken hoist rope detects a malfunction and is converted into a mode for handling errors.
- the crane control / regulation detects a malfunction and initiate the appropriate mode.
- a tilt sensor is provided in the region of the work basket.
- the inclinometer can detect a deviation of the work basket from the horizontal and report how it can occur, for example, when putting on or hooking the work basket.
- the crane control / regulation can thus influence the crane movement if preset limits are exceeded.
- the invention further relates to a crane comprising a device according to the invention for the transport of persons.
- This can be a mobile crane or a stationary crane, as used in confined spaces such as drilling rigs.
- the device presented here can be used not only to carry people in a work basket, but the two existing support means can also be used in the context of a two-hook operation of a crane in which material can be moved on both hoisting ropes. Instead of working basket and connecting element corresponding connecting means for material transport are connected to the carrying means.
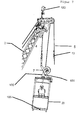
- FIG. 1 schematically shows an embodiment of the device in which the work basket 20 is pivotally connected about a horizontal axis 21 with the connecting element 7, the two hoisting ropes 4, 5 and further with the crane jib 2.
- the two hoisting ropes 4, 5 are guided over the roller head 3 and the deflection roller 6.
- the cable 11 extends between crane boom 2 and the region of the work basket 20.
- the crane 1 can be controlled and the power supply of the operating unit 22, which is provided in the region of the work basket 20, be ensured.
- the cable 11 may also be in communication with the angle transmitter 8, via which information about the orientation of the connecting element 7 can be transmitted to the crane control / regulation.
- a stroke limit switch 13 is provided in the region of the roller head 3. This stops the drives of the hoisting ropes when the drive basket 20 is too close to the crane boom 2 and threatens to collide with this.
- FIG. 2 shows the same arrangement as FIG. 1 after occurrence of a failure of one of the hoisting ropes 4, 5. It can be seen that the intact hoist rope 4 is still securely connected to the work basket 20 and also the cable connection between the control unit 22 and crane control / regulation is still intact.
- FIG. 3 shows an alternative embodiment of the device in which the connecting element 7 is formed as a rocker 30.
- the first hoist rope 4, which is a Haupthubseil in the illustrated embodiment, usually carries the main load of the arrangement.
- the second hoist rope 5 is meanwhile subjected to a lower load.
- the first hoist rope 4 can be referred to here as a "master”, which carries the actual load of the work basket 20 as the main cable.
- the second hoist rope 5, however, can be referred to as a "slave”, which is tracked and in the case of tearing of the main rope as an auxiliary rope takes over the crane load.
- the second hoist rope 5 is attached to the rocker 30 and pulls with a constant force, for. B. 0.5 t.
- the rocker 30 can rock about a horizontal axis 31. This horizontal axis 31 is preferably mounted in alignment with the first hoisting rope 4.
- a spring shock absorber assembly 32 is provided on one side of the rocker 30, .
- the spring force is such that the rocker 30 horizontally aligned at a tensile force of 0.5 t in the second hoist rope 5 is.
- the device elements around the angle encoder 8 can be omitted. Should in this case the first hoist rope 4 tear, then steers according to FIG.
- FIG. 4 schematically shows an illustration of a crane 1 with a device according to the invention.
- the crane 1 is shown in two states. First, in an assembled state, in which the crane boom 2 is only retracted and at the same time mounted approximately horizontally. On the other hand in an operational working condition (working position) in which the crane jib 2 is erected.
- FIG. 5 also shows schematically a representation of the crane 1 with a device according to the invention, wherein in particular an intermediate step during Austeleskopieren the crane jib 2 is shown.
- the crane boom 2 is in a substantially vertical orientation and is at the same time in a retracted state.
- the work basket 20 is lifted from the ground and can be moved by extending the crane jib 2 substantially vertically upwards.
- FIG. 6 shows a detailed view of a crane according to the invention 1 or a device according to the invention, which can be used in two modes.
- the first operating mode is the normal and known crane operation and, as a second operating mode, the crane operation with work cage 20 as in FIG. 6 is shown.
- Crane 1 has a permanent approval for both operating modes and can be operated alternately in both operating modes.
- the working basket 20 is shown, which is connected via the connecting element 7 with the hoisting ropes 4, 5 and further with the crane jib 2.
- At least one of the hoisting ropes 4, 5 in this case has a Hubendschalter 13. But it can also be provided that each of the hoisting ropes 4, 5 has a Hubendschalter 13.
- the position number is directed to the associated weight of Hubendschalters 13.
- Gymesslaschen 104 are additionally provided which measure the forces in the hoisting ropes 4, 5 and report to the crane control / regulation or to a load torque limit 101.
- the connecting element 7 is itself connected via a rotary joint 9 with a fuse 10 to the work basket 20.
- FIG. 7 the unlikely case is shown that one of the hoisting ropes 4, 5 breaks.
- the connecting element 7 deflects. This deflection can be damped and limited by a targeted stop 100.
- a tilt sensor 105 To measure a deflection can be provided on the work basket 20 a tilt sensor 105.
- the crane 1 can be developed from a standard version or a very close to the standard special version. It can e.g. A new luffing cylinder will be necessary to comply with the requirements for machines that carry people. However, these components can also be used for crane operation. Also known per se load torque limit 101 in a two-channel design is conceivable.
- the load torque limiter 101 may be designed such that monitoring with regard to the failure criterion "tilting" is sufficient.
- the sensors listed below can still be extended via a sensor to determine the telescopic boom length and the telescopic boom angle. All Sensors together can then form a complete additional load torque limit against tilting.
- FIG. 8 also shows a structogram usable in crane control to define the two modes of crane operation and crane operation with work cage 20 with their respective presets and defaults.
- the crane control / regulation initially asks whether a work cage 20 is attached to the crane 1.
- Letter A shows a pure crane operation as a detected mode, ie in which the work basket 20 is not attached.
- the crane control / regulation has determined that the crane is set in crane operation mode with working cage.
- the following specifications may be present, for example:
- the crane 1 is set with maximum ballast and maximum support base.
- a variable support of the crane 1 is activated and the sliding beams of the crane 1 are bolted.
- the shear of winch-1 and winch-2 can each be easily adjusted and the deflection of winch-1 can be adjusted via the main boom, while the winch-2 deflection over the mast nose (work basket adapter) can be set.
- the slack rope monitoring can be activated and winch-1 and winch-2 can be operated in parallel operation with length compensation.
- the speed of the hoists can be set to, for example, 0.4 m / s (parallel operation) and a wind transmitter must be present.
- a maximum load with double safety can be given as an example according to letter B.2.
- the rotational speed can be limited to 0.34 rpm, for example, and the telescoping movement can be completely blocked according to letter B.2.
- the rocking can be reduced to about 50 percent and the load torque limit of the work basket 20 can be activated.
- the permissible basket weight can be 850 kg.
- the crane control / regulation in the embodiment shown can check in a further step which is the current operating point of the crane 1 or how the corresponding selector switch is switched.
- the emergency stop of the platform 20 may be inactive according to point B.2.1.
- the emergency stop in the cabin of crane 1 can be active and both emergency stop functions can be connected in series.
- the indicator light "basket” can be switched to OFF and the operation of the crane 1 only be approved from the cabin of the crane 1. The operation of the crane 1 out of the work basket 20 out can be blocked and the deadman function can be inactive.
- the emergency stop in the work cage 20 can be active accordingly, as well as the emergency stop in the cabin and both emergency stop functions can also be activated Be connected in series.
- the indicator light "basket” can be switched to ON and the operation of the crane 1 only from the work basket 20 be possible.
- the operation of the crane 1 from the cabin can be blocked and the deadman function can be activated.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Jib Cranes (AREA)
Abstract
Description
- Die Erfindung betrifft eine Vorrichtung zur Beförderung von Personen mittels eines Krans und einen Kran mit der Vorrichtung.
- Zur Personenbeförderung ist es bekannt, mobile Krane oder auch Hubbühnen zu benutzen. So war es bis zur Einführung strengerer Maschinenrichtlinien erlaubt, an einen gewöhnlichen Kran eine Vorrichtung zur Aufnahme eines Arbeitskorbs anzuhängen und Personen in diesem Arbeitskorb zu befördern.
- Vorrichtungen, die eigentlich zum Transport von Lasten ausgelegt sind, wie zum Beispiel Materialkrane, müssen gemäß den gültigen Maschinenrichtlinien zusätzliche Vorkehrungen und Sicherungen aufweisen, um zum Personentransport genutzt werden zu dürfen. Beispielsweise müssen gemäß der Maschinenrichtlinie Tragmittel des Arbeitskorbs, in welchem Personen befördert werden sollen, redundant ausgeführt sein. Dies hat den sicherheitsrelevanten Vorteil, dass beim Versagen eines der Tragmittel ein weiteres Tragmittel einen Absturz des Arbeitskorbs verhindert.
- Es ist zwar möglich Ausnahmegenehmigungen der Berufsgenossenschaften zum Betrieb eines Materialkrans zur Personenbeförderung einzuholen, jedoch ist dies mit einem erhöhten Verwaltungsaufwand und einer verringerten Flexibilität beim Kraneinsatz verbunden.
- Aufgabe der vorliegenden Erfindung ist es daher, eine Vorrichtung zur Beförderung von Personen mittels eines Krans bereitzustellen, welche redundant ausgeführte Tragmittel aufweist.
- Diese Aufgabe wird erfindungsgemäß durch eine Vorrichtung zur Beförderung von Personen mit den Merkmalen des Anspruches 1 gelöst. Danach ist eine Vorrichtung zur Beförderung von Personen mittels eines Krans vorgesehen, umfassend einen Kranausleger, eine Kransteuerung/-regelung, ein erstes Hubseil, ein zweites Hubseil, einen Rollenkopf und eine Umlenkrolle, wobei ein Arbeitskorb über ein Verbindungselement mit den beiden Hubseilen verbunden ist.
- Das Bereitstellen zweier Hubseile ist dabei eine Grundvoraussetzung zum Einhalten der entsprechenden Maschinenrichtlinie. Hierdurch kann gewährleistet werden, dass im Falle eines Versagens eines der Tragmittel das verbleibende Tragmittel einen Absturz des Arbeitskorbs und damit eine Gefährdung der beförderten Personen verhindert. Die Tragmittel können unabhängig voneinander über Rollenkopf und Umlenkrolle geführt werden. Ein mit der erfindungsgemäßen Vorrichtung ausgestatteter Kran erlaubt es, sowohl Personal als auch Material zu transportieren. Dieses bedeutet, dass im Bedarfsfall nicht sowohl Kran als auch zum Beispiel eine Hubarbeitsbühne vorgehalten werden müssen, sondern die Aufgaben des Materialund Personentransports von demselben Gerät übernommen werden können.
- Der Kranausleger kann dabei beliebig ausgebildet sein. Möglich sind Teleskopausleger, Gitterausleger oder Gitterelemente, mit oder ohne Klappspitze, Wippspitze oder fester Spitze. Des Weiteren kann eine kurze Spitze am Kran vorgesehen sein, wobei über diese kurze Spitze dann beispielsweise das zweite Hubseil führbar sein kann.
- Bei der Verwendung zweier Hubseile kann es aufgrund von unterschiedlichen Auf- bzw. Abrollgeschwindigkeiten der Seile von Seiltrommeln dazu kommen, dass die beiden Seile unterschiedlich schnell verstellt werden. Um dennoch eine sichere Ausrichtung des Arbeitskorbs und ein gleichmäßiges Führen beider Seile zu ermöglichen sind verschiedene Vorrichtungen möglich. Bevorzugt wird eine Sensorvorrichtung, in der das Verbindungselement einen Winkelgeber umfasst, der über ein Kabel mit der Kransteuerung/-regelung kommuniziert sowie mit Energie versorgbar ist.
- Dabei ist eine Abweichung der Ausrichtung des Verbindungselements von der Horizontalen durch den Winkelgeber feststellbar, an die Kransteuerung/-regelung kommunizierbar und von der Kransteuerung/-regelung korrigierbar. Zur Korrektur der Ausrichtung des Verbindungselements und damit zur gleichmäßigen Führung der Hubseile ist es möglich, die zwei Hubseile von zwei unterschiedlichen Antrieben in unterschiedlichen Geschwindigkeiten bedarfsabhängig wickeln zu lassen. Dabei ist es möglich, den Antrieb eines Hubseils als ,Master' zu führen und den Antrieb des anderen Hubseils als "Slave" nur nachzuführen.
- In der Vorrichtung kann alternativ das Verbindungselement als Wippe ausgeführt sein, die um eine horizontale Achse wippbar ist, wobei die horizontale Achse in der Flucht des ersten Hubseils liegt und wobei ein Federstoßdämpfer mit der Wippe verbunden ist, dessen Federkraft so bemessen ist, dass die Wippe bei einer bestimmten Zugkraft im zweiten Hubseil horizontal ausgerichtet ist.
- Um dabei Fehler und Risiken aufgrund von Undichtigkeiten im Wippzylinder des Auslegers auszuschließen, kann ein System, wie es bei Hubarbeitsbühnen bekannt ist angewandt werden. Dabei ist die Ringfläche des Zylinders mit einem hydraulischen Schloss versehen, so dass im Falle einer Leckage der Kolbendichtung die Stangenfläche die Last übernimmt. Da die Stangenfläche kleiner als die Kolbenfläche ist, erhöht sich der Druck im Verhältnis der Flächen. Die Rohrwandungen sind hierbei entsprechend dimensioniert.
- Es ist möglich, die Bewegung des Arbeitskorbs auf unterschiedliche Art und Weise zu kontrollieren. So kann in einer Ausführungsform eine Kransteuerung/ -regelung mit einer Bedieneinheit im Bereich eines Kranfahrerstandes vorgesehen sein. Möglich ist weiterhin, dass eine andere oder zusätzliche Bedieneinheit vorliegt, welche nicht ortsgebunden ist und über Funk oder per Kabel mit der Kransteuerung/-regelung kommunizieren kann. In einer besonders bevorzugten Ausführungsform umfasst die Vorrichtung im Bereich des Arbeitskorbs eine Bedieneinheit zum Bedienen der Kransteuerung/-regelung. Dies ist vor allem in Situationen von Vorteil, in denen Personen, die sich im Arbeitskorb befinden die Kranbewegung steuern. Dies kann beispielsweise der Fall sein, wenn der Arbeitskorb innerhalb einer Struktur, wie einem Kamin, bewegt wird, die von einem außerhalb davon positionierten Kran nicht einsehbar ist.
- Da es im Betrieb des Krans als Personenbeförderungseinrichtung vorkommen kann, dass der Arbeitskorb mit Personal in einem Bereich eingesetzt wird von dem aus keine Funkverbindung zu einer sich außerhalb dieses Bereiches befindlichen Kransteuerung/-regelung aufbaubar ist, ist es weiterhin vorteilhaft, wenn das bereits erwähnte Kabel auch zur Kommunikation zwischen Bedieneinheit und Kransteuerung/-regelung sowie zur Energieversorgung der Bedieneinheit bereitgestellt ist.
- So kann vermieden werden, dass das sich im Arbeitskorb befindliche Bedienpersonal den Arbeitskorb in einen Bereich manövriert, in dem eine Funkverbindung zwischen Bedieneinheit und Kransteuerung/-regelung unterbrochen wird und so der Arbeitskorb manövrierunfähig wird.
- Die Manövrierfähigkeit des Arbeitskorbes selbst hängt unter anderem mit der Positionierbarkeit des Kranauslegers, der Seilführung und der Anbindung des Arbeitskorbs an die Tragmittel zusammen. Während dabei die vertikale und horizontale Positionierung des Arbeitskorbs maßgeblich über dem Kranausleger und die Seilführung eingestellt werden können, kann es zweckmäßig sein, die Einstellung der Position des Arbeitskorbs um eine vertikale Rotationsachse des Arbeitskorbs zu ermöglichen.
- Hierzu ist es vorteilhaft, wenn in der Vorrichtung eine Drehverbindung mit Sicherung zwischen dem Verbindungselement und dem Arbeitskorb vorgesehen ist. Weiterhin vorteilhaft ist, wenn dabei diese Drehverbindung über einen Antrieb in Drehung versetzbar ist, wobei der Antrieb ebenfalls über das Kabel mit Energie versorgbar ist und darüber mit der Bedieneinheit und/oder der Kransteuerung/- regelung in Verbindung stehen kann.
- Eine solche Drehverbindung ermöglicht es speziell bei Arbeitskörben mit rechteckiger Grundfläche den Arbeitskorb in eine gewünschte Lage zu drehen, in der der Arbeitskorb zum Beispiel entlang einer Struktur ausgerichtet wird, zu der sich das Personal Zugang verschaffen möchte. Bei Arbeitskörben mit runden Grundflächen ist es möglich, dass eine Drehverbindung zum Ausrichten des Arbeitskorbes nicht notwendig ist und somit entfallen kann.
- Aus Sicherheitsgründen kann weiterhin vorgesehen sein, ein Mittel zur Begrenzung der maximalen Hubhöhe vorzusehen. Vorteilhaft ist eine Ausführung, in der wenigstens ein Hubendschalter im Bereich des Rollenkopfs und der Umlenkrolle vorgesehen ist, mittels dessen die maximale Hubhöhe der Vorrichtung begrenzbar ist. Der Hubendschalter bremst dabei die Seilbewegung ab, wenn eine entsprechende Struktur im Bereich des Arbeitskorbs eine Kraft auf den Hubendschalter ausübt. Auf diese Weise kann sichergestellt sein, dass bei einer Fehlsteuerung der Arbeitskorb oder die mit dem Arbeitskorb verbundenen Vorrichtungselemente nicht mit dem Kranausleger oder den mit diesem verbundenen Elementen in Konflikt geraten.
- Zur weiteren Steigerung der Betriebssicherheit kann darüber hinaus vorgesehen sein, dass die Kransteuerung/-regelung anhand der fehlenden Kraft im Antrieb eines gerissenen Hubseils eine Fehlfunktion feststellt und in einen Modus zur Handhabung von Fehlern überführt wird. Alternativ oder zusätzlich kann anhand einer großen Auslenkung des Verbindungselements die Kransteuerung/-regelung eine Fehlfunktion feststellen und den entsprechenden Modus einleiten.
- In einem weiteren bevorzugten Ausführungsbeispiel ist dabei denkbar, dass zusätzlich zu einer an der Vorrichtung vorhandenen Lastmomentbegrenzung eine parallele und vollständig autarke Lastmomentbegrenzung vorgesehen ist. Die zusätzliche Lastmomentbegrenzung greift dabei nur auf eigene Sensoren zu und alle ihre Komponenten sind zweikanalig ausgeführt. Damit stellt die Lastmomentbegrenzung für den Korbbetrieb vorteilhaft eine eigenständige Sicherheitseinrichtung dar.
- In einem weiteren bevorzugten Ausführungsbeispiel ist denkbar, dass in einem Verbindungsbereich zwischen jedem der Hubseile und dem Verbindungselement Zugmesslaschen vorgesehen sind. Die Zugmesslaschen melden dabei die Kraft in den Hubseilen an die Kransteuerung/-regelung und die Lastmomentbegrenzung. So sind das Gewicht des Arbeitskorbs sowie ein mögliches Reißen eines der Hubseile vorteilhaft überwacht. Auch das Vorliegen eines Schlappseils kann dann erkannt werden, wenn ein Seil einen signifikant geringeren Lastanteil trägt.
- In einem weiteren bevorzugten Ausführungsbeispiel ist denkbar, dass ein Neigungsgeber im Bereich des Arbeitskorbs vorgesehen ist. Der Neigungsgeber kann dabei eine Abweichung des Arbeitskorbs von der Horizontalen feststellen und melden, wie diese beispielsweise beim Aufsetzen oder Einhängen des Arbeitskorbs auftreten kann. Die Kransteuerung/-regelung kann so bei Überschreiten von vorgegebenen Grenzwerten die Kranbewegung beeinflussen.
- Die Erfindung betrifft ferner einen Kran, der eine erfindungsgemäße Vorrichtung zur Beförderung von Personen umfasst. Dabei kann es sich um einen Mobilkran oder auch um einen stationären Kran handeln, wie sie auf räumlich begrenzten Orten wie zum Beispiel Bohrinseln benutzt werden.
- Die hier vorgestellte Vorrichtung kann dabei nicht nur zum Befördern von Personen in einem Arbeitskorb benutzt werden, sondern die zwei vorhandenen Tragmittel können auch im Rahmen eines Zweihakenbetriebes eines Krans genutzt werden, in dem an beiden Hubseilen Material bewegt werden kann. Dabei werden statt Arbeitskorb und Verbindungselement entsprechende Verbindungsmittel zum Materialtransport mit den Tragemitteln verbunden.
- Weitere Merkmale, Einzelheiten und Vorteile der Erfindung werden anhand von in der Zeichnung dargestellten Ausführungsbeispielen näher erläutert. Es zeigen:
-
Figur 1 : eine schematische Darstellung der Vorrichtung im betriebsbereiten Zustand, -
Figur 2 : eine schematische Darstellung der Vorrichtung mit Versagen eines Hubseils, -
Figur 3 : eine alternative Ausführungsform mit Federstoßdämpferanordnung und -
Figur 4 : eine schematische Darstellung eines Krans mit einer erfindungsgemäßen Vorrichtung. -
Figur 1 zeigt schematisch eine Ausführungsform der Vorrichtung, bei der der Arbeitskorb 20 schwenkbar um eine horizontale Achse 21 mit dem Verbindungselement 7, den beiden Hubseilen 4, 5 und weiter mit dem Kranausleger 2 verbunden ist. Die beiden Hubseile 4, 5 werden über den Rollenkopf 3 und die Umlenkrolle 6 geführt. Dabei ist erkennbar, dass das Kabel 11 zwischen Kranausleger 2 und dem Bereich des Arbeitskorbs 20 verläuft. Über dieses Kabel 11 kann der Kran 1 gesteuert sowie die Energieversorgung der Bedieneinheit 22, welche im Bereich des Arbeitskorbs 20 bereitgestellt ist, sichergestellt werden. - Das Kabel 11 kann weiterhin mit dem Winkelgeber 8 in Verbindung stehen, über den Informationen über die Ausrichtung des Verbindungselements 7 an die Kransteuerung/-regelung übermittelt werden können.
- Zur Verhinderung einer Kollision ist überdies ein Hubendschalter 13 im Bereich des Rollenkopfs 3 vorgesehen. Dieser hält die Antriebe der Hubseile auf, wenn sich der Antriebskorb 20 zu sehr dem Kranausleger 2 nähert und droht, mit diesem zu kollidieren.
-
Figur 2 zeigt die gleiche Anordnung wieFigur 1 nach Eintreten eines Versagens eines der Hubseile 4, 5. Erkennbar ist, dass das intakte Hubseil 4 weiterhin sicher mit dem Arbeitskorb 20 verbunden ist und auch die Kabelverbindung zwischen Bedieneinheit 22 und Kransteuerung/-regelung weiterhin intakt ist. - Um den Ruck in dem Arbeitskorb 20 im Fälle des Versagens eines der Hubseile 4, 5 gering zu halten, ist möglich, entsprechende Dämpfungsmittel vorzusehen. Diese verlangsamen die Auslenkbewegung des Verbindungsmittels 7, so dass das Personal nicht durch eine abrupte Bewegung der Vorrichtung gefährdet wird.
-
Figur 3 zeigt eine alternative Ausführungsform der Vorrichtung, in welcher das Verbindungselement 7 als Wippe 30 ausgebildet ist. Das erste Hubseil 4, welches in der gezeigten Ausführungsform ein Haupthubseil ist, trägt im Regelfall die Hauptlast der Anordnung. - Das zweite Hubseil 5 ist währenddessen mit einer geringeren Last beaufschlagt. Das erste Hubseil 4 kann hierbei als "Master" bezeichnet werden, das als Hauptseil die eigentliche Last des Arbeitskorbs 20 trägt. Das zweite Hubseil 5 kann dagegen als "Slave" bezeichnet werden, das nachgeführt wird und im Falle des Reißens des Hauptseils als Hilfsseil die Kranlast übernimmt.
- Das zweite Hubseil 5 ist an der Wippe 30 angebracht und zieht mit einer konstanten Kraft, z. B. 0,5 t. Die Wippe 30 kann um eine horizontale Achse 31 wippen. Diese horizontale Achse 31 ist vorzugsweise in der Flucht des ersten Hubseils 4 angebracht. Auf einer Seite der Wippe 30 ist eine Federstoßdämpferanordnung 32 vorgesehen. Im gezeigten Ausführungsbeispiel ist deren Federkraft ist so bemessen, dass die Wippe 30 bei einer Zugkraft von 0,5t im zweiten Hubseil 5 horizontal ausgerichtet ist. Die Vorrichtungselemente um den Winkelgeber 8 können entfallen. Sollte in diesem Fall das erste Hubseil 4 reißen, dann lenkt sich gemäß
Figur 2 das Verbindungselement 7, hier also die Wippe 30 aus, bis die Wippe 30 an einen Anschlag anstößt und das zweite Hubseil 5 die gesamte Last übernimmt. Aufgrund dieser Dämpfungsbewegung wird der Arbeitskorb 20 im Falle des Reißens des Haupthubseils verlangsamt in die neue Halteposition gebracht. Abrupte Bewegungen des Arbeitskorb 20, welche eine potentielle Gefährdung des sich darin befindlichen Personals nach sich ziehen, werden somit vermieden. -
Figur 4 zeigt schematisch eine Darstellung eines Krans 1 mit einer erfindungsgemäßen Vorrichtung. Hierbei ist der Kran 1 in zwei Zuständen gezeigt. Zum einen in einem Montagezustand, in dem der Kranausleger 2 nur eingefahren und gleichzeitig in etwa horizontal gelagert ist. Zum anderen in einem betriebsbereiten Arbeitszustand (Arbeitsstellung), in dem der Kranausleger 2 aufgerichtet ist. - Im Arbeitszustand sind zusätzlich zwei weitere mögliche Konfigurationen der Kranspitze dargestellt. In einer Konfiguration mit maximaler Hubhöhe verläuft dabei die Kranspitze im Wesentlichen parallel zum Kranausleger 2. In einer anderen Konfiguration ist die Kranspitze abgeknickt.
-
Figur 5 zeigt ferner schematisch eine Darstellung des Krans 1 mit einer erfindungsgemäßen Vorrichtung, wobei besonders ein Zwischenschritt beim Austeleskopieren des Kranauslegers 2 gezeigt ist. Hierbei befindet sich der Kranausleger 2 in einer im Wesentlichen vertikalen Ausrichtung und ist dabei gleichzeitig in einem eingefahrenen Zustand. Der Arbeitskorb 20 ist dabei vom Boden abgehoben und kann durch Ausfahren des Kranauslegers 2 im Wesentlichen vertikal nach oben bewegt werden. -
Figur 6 zeigt eine Detailansicht eines erfindungsgemäßen Krans 1 bzw. einer erfindungsgemäßen Vorrichtung, der bzw. die in zwei Betriebsarten eingesetzt werden kann. Als erste Betriebsart ist dabei der normale und bekannte Kranbetrieb zu nennen und als zweite Betriebsart der Kranbetrieb mit Arbeitskorb 20 wie er inFigur 6 gezeigt ist. Für beide Betriebsarten hat der Kran 1 eine dauerhafte Zulassung und kann abwechselnd in beiden Betriebsarten betrieben werden. - In
Figur 6 ist der Arbeitskorb 20 gezeigt, der über das Verbindungselement 7 mit den Hubseilen 4, 5 und weiter mit dem Kranausleger 2 verbunden ist. Mindestens eines der Hubseile 4, 5 weist dabei einen Hubendschalter 13 auf. Es kann aber genauso vorgesehen sein, dass jedes der Hubseile 4, 5 einen Hubendschalter 13 aufweist. Die Positionsnummer ist dabei auf das zugehörige Gewicht des Hubendschalters 13 gerichtet. Zwischen den Hubseilen 4, 5 und dem Verbindungselement 7 sind zusätzlich Zugmesslaschen 104 vorgesehen, welche die Kräfte in den Hubseilen 4, 5 messen und an die Kransteuerung/-regelung bzw. an eine Lastmomentbegrenzung 101 melden. Das Verbindungselement 7 ist selbst über eine Drehverbindung 9 mit einer Sicherung 10 mit dem Arbeitskorb 20 verbunden. - In
Figur 7 ist der unwahrscheinliche Fall gezeigt, dass eines der Hubseile 4, 5 reißt. Wenn dies geschieht, dann lenkt sich das Verbindungselement 7 aus. Diese Auslenkung kann gedämpft erfolgen und von einem gezielt angebrachten Anschlag 100 begrenzt werden. Zur Messung einer Auslenkung kann dabei am Arbeitskorb 20 ein Neigungsgeber 105 vorgesehen sein. - Der Kran 1 kann aus einer Standardausführung oder einen sehr nahen am Standard befindlichen Sonderausführung weiterentwickelt sein. Es kann z.B. ein neuer Wippzylinder notwendig sein, um die Vorgaben für Maschinen, die Personen befördern einzuhalten. Diese Komponenten können aber genauso für den Kranbetrieb eingesetzt werden. Auch ist eine an sich bekannte Lastmomentbegrenzung 101 in einer zweikanaligen Ausführung denkbar.
- Die Lastmomentbegrenzung 101 kann derart ausgeführt sein, dass eine Überwachung hinsichtlich des Versagenskriteriums "Kippen" ausreichend ist. Die weiter unten aufgeführten Sensoren können noch über einen Sensor zur Ermittlung der Teleskopauslegerlänge und des Teleskopauslegerwinkels erweitert werden. Alle Sensoren zusammen können dann eine vollständige zusätzliche Lastmomentbegrenzung gegen Kippen bilden.
- Als weitere Sicherheitseinrichtung können dabei weiter folgende Vorrichtungen eingeführt werden:
- Zur Arbeitskorbüberwachung kann eine in
Figur 7 gezeigte Kamera 103 im Bereich des Rollenkopfes 3 vorgesehen sein und den Arbeitskorb 20 überwachen. So ist das Geschehen im Arbeitskorb 20 auch dann vom Boden oder von der Krankabine aus zu betrachten, wenn kein direkter Sichtkontakt zu dem Arbeitskorb 20 besteht. - Es kann ebenfalls eine Beleuchtung des Arbeitskorbs 20 vorgesehen sein, die beispielsweise über das Kabel 11, welches vom Kranausleger 2 zum Arbeitskorb 20 führt, mit Strom versorgbar ist.
-
Figur 8 zeigt ferner ein Struktogramm, das bei der Kransteuerung/-regelung einsetzbar ist, um die beiden Betriebsarten Kranbetrieb und Kranbetrieb mit Arbeitskorb 20 mit ihren jeweiligen Voreinstellungen und Vorgaben zu definieren. Die Kransteuerung/-regelung fragt dabei zunächst ab, ob am Kran 1 ein Arbeitskorb 20 angebaut ist. Buchstabe A zeigt dabei einen reinen Kranbetrieb als festgestellte Betriebsart, bei der also der Arbeitskorb 20 nicht angebaut ist. Für die Kransteuerung/-regelung bedeutet dies zum Beispiel, dass die Schlappseilüberwachung inaktiv ist, ein Windgeber optional zuschaltbar ist, Traglasten des Krans 1 nach DIN berechnet werden und die Lastmomentbegrenzung des Arbeitskorbs inaktiv mitlaufen kann. - Nach Buchstabe B hat die Kransteuerung/-regelung festgestellt, dass der Kran in der Betriebsart Kranbetrieb mit Arbeitskorb eingestellt ist. Dabei können beispielsweise folgende Vorgaben vorliegen: Der Kran 1 ist mit maximalem Ballast und maximaler Abstützbasis eingestellt. Eine variable Abstützung des Krans 1 ist aktiviert und die Schiebeholme des Krans 1 sind verbolzt. Die Scherung von Winde-1 und Winde-2 kann jeweils einfach eingestellt sein und die Umlenkung der Winde-1 kann über den Hauptausleger eingestellt sein, während die Umlenkung der Winde-2 über die Mastnase (Arbeitskorb-Adapter) eingestellt sein kann. Die Schlappseilüberwachung kann aktiviert sein und Winde-1 und Winde-2 können im Parallelbetrieb mit Längenausgleich betrieben werden. Die Geschwindigkeit der Hubwerke kann auf beispielsweise 0,4 m/s (Parallel-Betrieb) eingestellt sein und ein Windgeber muss vorhanden sein.
- Die Kransteuerung/-regelung prüft ferner ob sich Personen im Arbeitskorb aufhalten. Wenn dies verneint wird, erfolgt nach Buchstabe B.1 die Berechnung der möglichen Traglast nach DIN. Ferner können nach Buchstabe B.1 folgende Parameter beispielhaft vorgegeben sein:
- Die Drehgeschwindigkeit kann einen zulässigen Bereich von 10 bis 100 Prozent aufweisen, die Teleskopauslage kann von 10 bis 100 Prozent einstellbar sein und das Wippen des Kranauslegers 2 kann auf bis zu 50 Prozent eingestellt sein. Die Lastmomentbegrenzung 101 des Arbeitskorbs 20 kann inaktiv sein und das zulässige Korbgewicht beispielsweise 540 kg (gesamt) betragen.
- Wenn die Kransteuerung/-regelung dagegen erkennt, dass sich Personen im Arbeitskorb 20 befinden, kann nach Buchstabe B.2 eine maximale Traglast mit zweifacher Sicherheit als Beispiel vorgegeben sein. Die Drehgeschwindigkeit kann beispielhaft auf 0,34 U/min begrenzt sein und die Teleskopierbewegung kann nach Buchstabe B.2 gänzlich gesperrt sein. Ferner kann das Wippen auf ca. 50 Prozent reduziert sein und die Lastmomentbegrenzung des Arbeitskorbs 20 kann aktiviert sein. Das zulässige Korbgewicht kann dabei 850 kg betragen.
- Falls die Kransteuerung/-regelung feststellt, dass sich Personen im Arbeitskorb 20 befinden, kann die Kransteuerung/-regelung im gezeigten Ausführungsbeispiel in einem weiteren Schritt prüfen, welches die aktuelle Bedienstelle des Krans 1 ist bzw. wie der entsprechende Wahlschalter geschaltet ist.
- Wenn festgestellt wird, dass die Bedienstelle des Krans 1 in der Kabine des Krans 1 vorliegt, so kann nach Buchstabe B.2.1 der Notaus des Arbeitskorbs 20 inaktiv sein. Dagegen kann das Notaus in der Kabine des Krans 1 aktiv sein und beide Notausfunktionen können dabei in Serie geschaltet sein. Ferner kann die Meldeleuchte "Korb" auf AUS geschaltet sein und die Bedienung des Krans 1 nur aus der Kabine des Krans 1 zugelassen sein. Die Bedienung des Krans 1 aus dem Arbeitskorb 20 heraus kann blockiert sein und die Totmannfunktion kann inaktiv sein.
- Wird dagegen nach Buchstabe B.2.2 festgestellt, dass die Bedienstelle des Krans 1 im Korb bzw. im Arbeitskorb 20 vorliegt, so kann entsprechend beispielsweise der Notaus im Arbeitskorb 20 aktiv sein, ebenso wie der Notaus in der Kabine und beide Notausfunktionen können dabei ebenfalls in Serie geschaltet sein. Die Meldeleuchte "Korb" kann auf EIN geschaltet sein und die Bedienung des Krans 1 nur aus dem Arbeitskorb 20 möglich sein. Die Bedienung des Krans 1 aus der Kabine kann blockiert sein und die Totmannfunktion kann aktiviert sein.
Claims (13)
- Vorrichtung zur Beförderung von Personen mittels eines Krans, umfassend einen Kranausleger (2), eine Kransteuerung/-regelung, ein erstes Hubseil (4), ein zweites Hubseil (5), einen Rollenkopf (3) und eine Umlenkrolle (6), dadurch gekennzeichnet, dass ein Arbeitskorb (20) über ein Verbindungselement (7) mit den beiden Hubseilen (4, 5) verbunden ist.
- Vorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass das Verbindungselement (7) einen Winkelgeber (8) umfasst, der über ein Kabel (11) mit der Kransteuerung/-regelung kommuniziert sowie mit Energie versorgbar ist.
- Vorrichtung nach Anspruch 2, dadurch gekennzeichnet, dass eine Abweichung der Ausrichtung des Verbindungselements (7) von der Horizontalen durch den Winkelgeber (8) feststellbar, an die Kransteuerung/-regelung kommunizierbar und von der Kransteuerung/- regelung korrigierbar ist.
- Vorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass das Verbindungselement (7) als Wippe (30) ausgeführt ist, die um eine horizontale Achse (31) wippbar ist, wobei die horizontale Achse (31) in der Flucht des ersten Hubseils (4) liegt, und wobei ein Federstoßdämpfer (32) mit der Wippe (30) verbunden ist, dessen Federkraft so bemessen ist, dass die Wippe (30) bei einer bestimmten Zugkraft im zweiten Hubseil (5) horizontal ausgerichtet ist.
- Vorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass sie im Bereich des Arbeitskorbs (20) eine Bedieneinheit (22) zum Bedienen der Kransteuerung/-regelung umfasst.
- Vorrichtung nach Anspruch 5, dadurch gekennzeichnet, dass zur Kommunikation zwischen Bedieneinheit (22) und Kransteuerung/- regelung sowie zur Energieversorgung der Bedieneinheit (22) das Kabel (11) bereitgestellt ist.
- Vorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass eine Drehverbindung (9) mit Sicherung (10) zwischen dem Verbindungselement (7) und dem Arbeitskorb (20) vorgesehen ist.
- Vorrichtung nach Anspruch 7, dadurch gekennzeichnet, dass die Drehverbindung (9) über einen Antrieb in Drehung versetzbar ist.
- Vorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass wenigstens ein Hubendschalter (13) im Bereich des Rollenkopfs (3) und/oder der Umlenkrolle (6) vorgesehen ist, mittels dessen die maximale Hubhöhe der Vorrichtung begrenzbar ist.
- Vorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass zusätzlich zu einer an der Vorrichtung vorhandenen Lastmomentbegrenzung eine parallele und vollständig autarke Lastmomentbegrenzung (101) vorgesehen ist.
- Vorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass zwischen jedem der Hubseile (4, 5) und dem Verbindungselement (7) Zugmesslaschen (104) vorgesehen sind.
- Vorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass ein Neigungsgeber (105) im Bereich des Arbeitskorbs (20) vorgesehen ist.
- Kran (1), umfassend eine Vorrichtung zur Beförderung von Personen nach einem oder mehreren der vorhergehenden Ansprüche.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE201220009836 DE202012009836U1 (de) | 2012-10-15 | 2012-10-15 | Vorrichtung zur Beförderung von Personen mittels eines Krans - Kran mit Vorrichtung zur Beförderung von Personen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2719652A1 true EP2719652A1 (de) | 2014-04-16 |
| EP2719652B1 EP2719652B1 (de) | 2015-05-06 |
Family
ID=49382177
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20130004922 Active EP2719652B1 (de) | 2012-10-15 | 2013-10-15 | Vorrichtung zur Beförderung von Personen mittels eines Krans, und Kran mit einer Vorrichtung zur Beförderung von Personen |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2719652B1 (de) |
| DE (1) | DE202012009836U1 (de) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020187599A1 (de) * | 2019-03-20 | 2020-09-24 | Liebherr-Werk Biberach Gmbh | Kran |
| CN114981197A (zh) * | 2020-01-20 | 2022-08-30 | 因温特奥股份公司 | 用于在电梯竖井内能够受控地提升有效载荷的提升设备 |
| US11964850B2 (en) | 2019-03-20 | 2024-04-23 | Liebherr-Werk Biberach Gmbh | Crane |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104085803B (zh) * | 2014-06-30 | 2016-03-30 | 长治清华机械厂 | 起重机钢丝绳防过放保护装置 |
| CN109250625B (zh) * | 2018-10-21 | 2020-04-10 | 福建省永泰建筑工程公司 | 一种具有警示功能的工程用起吊架 |
| CN109704208B (zh) * | 2018-12-18 | 2020-09-25 | 广东博智林机器人有限公司 | 带有装卸系统的模块承载楼 |
| RU200012U1 (ru) * | 2020-05-29 | 2020-10-01 | Антон Борисович Жуков | Выключатель для аварийной остановки подъемной двери |
| CN115340031B (zh) * | 2022-08-19 | 2024-12-10 | 江苏科技大学 | 一种全回转起重船舶吊机绳索紧急制动装置 |
| CN118327268B (zh) * | 2024-06-17 | 2024-10-22 | 河南友铭金属制品有限公司 | 一种建筑设计施工用升降台 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1026502B (de) * | 1958-03-20 | |||
| DE2129447B1 (de) * | 1971-06-14 | 1972-11-09 | Mannesmann Leichtbau Gmbh | Mehrlagen-Seilwicklung fuer Fassadenbefahreinrichtungen |
| GB1411177A (en) * | 1972-02-16 | 1975-10-22 | Potain Sa | Tower cranes |
| DE2445374A1 (de) * | 1974-09-23 | 1976-04-08 | Constr Navales Ind | Vorrichtung zum sichern einer kette, insbesondere zum unterbinden des fallens einer an einer kette haengenden last |
| US4069921A (en) * | 1976-01-30 | 1978-01-24 | Harnischfeger Corporation | Overhead crane including a single failure proof hoist |
| JPS58134542U (ja) * | 1982-03-08 | 1983-09-10 | 前田建設工業株式会社 | 建築作業場等における足場に対する荷吊揚取込装置 |
| FR2572375A1 (fr) * | 1984-10-26 | 1986-05-02 | Lagneau Jean | Dispositif de securite pour charge suspendue |
| CA2080715A1 (en) * | 1992-10-16 | 1994-04-17 | Harry Borenstein | Suspended work platform with safety line |
| JPH08231160A (ja) * | 1995-03-01 | 1996-09-10 | Kinan Shatai Kogyo:Kk | 仮設エレベータ装置 |
| DE29719344U1 (de) * | 1997-10-31 | 1998-01-15 | Rinio, Johannes, 59348 Lüdinghausen | Vorrichtung zur Vertikalverlagerung von Personenaufnahmemitteln |
| WO2002057176A1 (fr) * | 2001-01-18 | 2002-07-25 | Plumettaz Sa | Dispositifs de freinage d'urgence et d'amortissement de chocs pour un ascenseur ou charges suspendu |
| WO2011152711A1 (en) * | 2010-06-02 | 2011-12-08 | Itrec B.V. | Marine load raising and lowering system |
-
2012
- 2012-10-15 DE DE201220009836 patent/DE202012009836U1/de not_active Expired - Lifetime
-
2013
- 2013-10-15 EP EP20130004922 patent/EP2719652B1/de active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1026502B (de) * | 1958-03-20 | |||
| DE2129447B1 (de) * | 1971-06-14 | 1972-11-09 | Mannesmann Leichtbau Gmbh | Mehrlagen-Seilwicklung fuer Fassadenbefahreinrichtungen |
| GB1411177A (en) * | 1972-02-16 | 1975-10-22 | Potain Sa | Tower cranes |
| DE2445374A1 (de) * | 1974-09-23 | 1976-04-08 | Constr Navales Ind | Vorrichtung zum sichern einer kette, insbesondere zum unterbinden des fallens einer an einer kette haengenden last |
| US4069921A (en) * | 1976-01-30 | 1978-01-24 | Harnischfeger Corporation | Overhead crane including a single failure proof hoist |
| JPS58134542U (ja) * | 1982-03-08 | 1983-09-10 | 前田建設工業株式会社 | 建築作業場等における足場に対する荷吊揚取込装置 |
| FR2572375A1 (fr) * | 1984-10-26 | 1986-05-02 | Lagneau Jean | Dispositif de securite pour charge suspendue |
| CA2080715A1 (en) * | 1992-10-16 | 1994-04-17 | Harry Borenstein | Suspended work platform with safety line |
| JPH08231160A (ja) * | 1995-03-01 | 1996-09-10 | Kinan Shatai Kogyo:Kk | 仮設エレベータ装置 |
| DE29719344U1 (de) * | 1997-10-31 | 1998-01-15 | Rinio, Johannes, 59348 Lüdinghausen | Vorrichtung zur Vertikalverlagerung von Personenaufnahmemitteln |
| WO2002057176A1 (fr) * | 2001-01-18 | 2002-07-25 | Plumettaz Sa | Dispositifs de freinage d'urgence et d'amortissement de chocs pour un ascenseur ou charges suspendu |
| WO2011152711A1 (en) * | 2010-06-02 | 2011-12-08 | Itrec B.V. | Marine load raising and lowering system |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020187599A1 (de) * | 2019-03-20 | 2020-09-24 | Liebherr-Werk Biberach Gmbh | Kran |
| CN113677614A (zh) * | 2019-03-20 | 2021-11-19 | 利勃海尔工厂比伯拉赫股份有限公司 | 起重机 |
| US11964850B2 (en) | 2019-03-20 | 2024-04-23 | Liebherr-Werk Biberach Gmbh | Crane |
| CN113677614B (zh) * | 2019-03-20 | 2024-06-11 | 利勃海尔工厂比伯拉赫股份有限公司 | 起重机 |
| CN114981197A (zh) * | 2020-01-20 | 2022-08-30 | 因温特奥股份公司 | 用于在电梯竖井内能够受控地提升有效载荷的提升设备 |
| US12325611B2 (en) | 2020-01-20 | 2025-06-10 | Inventio Ag | Lifting device for lifting a payload within an elevator shaft in a controllable manner |
Also Published As
| Publication number | Publication date |
|---|---|
| DE202012009836U1 (de) | 2014-01-16 |
| EP2719652B1 (de) | 2015-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2719652B1 (de) | Vorrichtung zur Beförderung von Personen mittels eines Krans, und Kran mit einer Vorrichtung zur Beförderung von Personen | |
| DE102011107754B4 (de) | Winkelbezogenes Verfahren zur Überwachung der Kransicherheit während des Rüstvorgangs, sowie Kran und Kransteuerung | |
| EP2289834B1 (de) | Kran | |
| EP3280674B1 (de) | Transporteinrichtung | |
| EP3256414B1 (de) | Kran sowie verfahren zum überwachen der überlastsicherung eines solchen krans | |
| EP3256415B1 (de) | Kran sowie verfahren zum überwachen der überlastsicherung eines solchen krans | |
| DE102015202734A1 (de) | Kran und Verfahren zum Beeinflussen einer Verformung eines Auslegersystems eines derartigen Krans | |
| EP3489187B1 (de) | Klettersystem für einen kran | |
| EP2674384B1 (de) | Verfahren zur Überwachung der Kransicherheit sowie Kran | |
| EP3169619B1 (de) | Kran, vorrichtung und verfahren zum umleiten von kräften an einem kran | |
| DE102014012661B4 (de) | Verfahren zum Betrieb eines Krans und Kran | |
| WO2019179870A1 (de) | Gefederte hebevorrichtung für einen kran | |
| EP0504867B1 (de) | Rechnergesteuertes Hubzugsystem mit wenigstens zwei Hubzügen | |
| DE102016007723A1 (de) | Lastwiegung am Lasthaken | |
| EP3715308B1 (de) | Anschlagmittel zum aufhängen von lasten an ein tragmittel | |
| DE102022132028B3 (de) | Kran mit Abspannbock und Verfahren zum Abspannen eines solchen | |
| EP4192779B1 (de) | Auslegerdrehkran mit einer kamera sowie verfahren zur reduzierung von lastpendelungen im kranbetrieb | |
| DE102019102828A1 (de) | Verfahren und Vorrichtung zur Verhinderung von Schlaffseil | |
| DE102019126687A1 (de) | Kran | |
| DE202011001850U1 (de) | Kran | |
| EP4461693B1 (de) | Kran mit derrickballast | |
| DE112014002081B4 (de) | Sensorbasierte Überwachung von Windrichtung und Wärmeeinstrahlung für ein mobiles Arbeitsgerät | |
| EP0387399A2 (de) | Verfahren und Vorrichtung zur Steuerung der Kranfunktionen eines mobilen Teleskopauslegerkrans | |
| DE102016011189B4 (de) | Vorrichtung zum Stabilisieren eines Krans | |
| EP4516718B1 (de) | Verfahren zur traglastüberwachung eines krans mit zwei lastaufnahmemitteln |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20141016 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20150216 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 725546 Country of ref document: AT Kind code of ref document: T Effective date: 20150615 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502013000618 Country of ref document: DE Effective date: 20150618 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20150506 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150806 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150907 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150807 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150806 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150906 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502013000618 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150506 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20160209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151015 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20160630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20131015 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161031 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161031 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20171015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150506 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 725546 Country of ref document: AT Kind code of ref document: T Effective date: 20181015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181015 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230607 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20251030 Year of fee payment: 13 |