EP3345507A1 - Mechanik für einen stuhl - Google Patents
Mechanik für einen stuhl Download PDFInfo
- Publication number
- EP3345507A1 EP3345507A1 EP18000037.4A EP18000037A EP3345507A1 EP 3345507 A1 EP3345507 A1 EP 3345507A1 EP 18000037 A EP18000037 A EP 18000037A EP 3345507 A1 EP3345507 A1 EP 3345507A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- seat
- seat support
- backrest
- support member
- chair
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 title claims abstract description 66
- 230000033001 locomotion Effects 0.000 claims description 71
- 230000008878 coupling Effects 0.000 description 15
- 238000010168 coupling process Methods 0.000 description 15
- 238000005859 coupling reaction Methods 0.000 description 15
- 230000001360 synchronised effect Effects 0.000 description 6
- 230000000712 assembly Effects 0.000 description 4
- 238000000429 assembly Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000005096 rolling process Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 239000013013 elastic material Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000000243 solution Substances 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 230000005283 ground state Effects 0.000 description 1
- 239000004615 ingredient Substances 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C1/00—Chairs adapted for special purposes
- A47C1/02—Reclining or easy chairs
- A47C1/031—Reclining or easy chairs having coupled concurrently adjustable supporting parts
- A47C1/034—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts including a leg-rest or foot-rest
- A47C1/035—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts including a leg-rest or foot-rest in combination with movably coupled seat and back-rest, i.e. the seat and back-rest being movably coupled in such a way that the extension mechanism of the foot-rest is actuated at least by the relative movements of seat and backrest
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C1/00—Chairs adapted for special purposes
- A47C1/02—Reclining or easy chairs
- A47C1/022—Reclining or easy chairs having independently-adjustable supporting parts
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C1/00—Chairs adapted for special purposes
- A47C1/02—Reclining or easy chairs
- A47C1/031—Reclining or easy chairs having coupled concurrently adjustable supporting parts
- A47C1/032—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest
- A47C1/03255—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest with a central column, e.g. rocking office chairs
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C3/00—Chairs characterised by structural features; Chairs or stools with rotatable or vertically-adjustable seats
- A47C3/12—Chairs characterised by structural features; Chairs or stools with rotatable or vertically-adjustable seats with shell-shape seat and back-rest unit, e.g. having arm rests
Definitions
- the invention relates to a mechanism for a chair, in particular for an office chair. Moreover, the invention relates to a chair with such a chair mechanism.
- the term synchronizing mechanism is understood to mean assemblies in the seat substructure of an office chair, which provide kinematics which are coupled to one another and bring about a certain relative movement of the seat and backrest.
- the backrest support which extends in a conventional manner from the actual synchronizing mechanism to the rear, carries on an upwardly extending arm, the backrest of the office chair.
- Seat support and backrest support are usually coupled so articulated that a pivoting movement of the backrest to the rear - as can be caused for example by leaning of the chair user to the backrest - induces a lowering movement of the rear edge of the seat down.
- the so-called "shirt pull-out effect” is prevented and the seating comfort is increased.
- asynchronous mechanism is understood to mean those assemblies in which a pivoting of the backrest causes no movement of the seat support. In other words, moving only when turning backwards Backrest.
- the seating comfort is reduced compared to synchronous mechanisms.
- asynchronous mechanisms due to a "divergence" of the movements of the backrest and seat of the so-called “shirt extraction effect” occur.
- such assemblies are significantly cheaper to manufacture than the synchronizing mechanisms described above.
- Rocking mechanisms are comparatively simple assemblies in the seat base of chairs, in which the backrest support is more or less rigidly connected to the seat support, the seat or the frame of the chair.
- the resulting seat carrier backrest support combination is pivotable by means of the tilt mechanism to a transverse to the chair longitudinal direction pivot axis to the rear when the user of the chair leans against the backrest.
- Such rocking mechanisms are often used instead of synchronous mechanisms in inexpensive visitor or conference chairs to realize there a simple Wippfunktion. Because of their relatively simple structure, rocking mechanisms are usually significantly cheaper to manufacture than the previously described mechanisms.
- An object of the present invention is to improve the seating comfort of chair mechanisms.
- the invention provides a chair mechanism with improved seating comfort.
- a core idea of the invention is to allow, as an alternative or in addition to the above-described pivoting movement forwards and backwards, a tilting movement of one or more mechanical components to the right and left.
- a two-part seat support is provided for this purpose.
- a two-part backrest support is additionally provided and the desired transverse movement of the seat support is transmitted to the backrest support via suitable means or vice versa.
- the movements of the individual mechanical components are independently executable. This means, for example, that a tilting movement of a seat support component seen in the chair longitudinal direction to the right or left regardless of a pivoting movement of the seat support forward or backward is possible. This is achieved in that over a conventional chair mechanism, the number of available degrees of freedom is increased. It results over conventional solutions improved movement behavior of the chair to movements of the user.
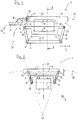
- Fig. 1 shows a mechanism 1 for an office chair in side view in the untwisted and not inclined state.
- Fig. 2 shows the mechanism 1 off Fig. 1 in a cross section along the line II-II.
- Fig. 3 shows the mechanism 1 off Fig. 2 with a laterally inclined seat support element.
- the mechanism 1 has a base support 2, which is set by means of a cone seat 3 on the upper end of a chair column (not shown).
- the mechanism 1 comprises a seat support 4, which is arranged on the base support 2 and is movable relative to the fixed base support 2 in the chair longitudinal direction 8 forwards and backwards.
- On the seat support 4 is usually provided with a padded seat seat (not shown) of the office chair mounted.
- the seat support 4 comprises a first seat support member 6 and a second seat support member 7, the second seat support member 7 being movable relative to the first seat support member 6 transversely to the chair longitudinal direction 8, i. to the right and left, is movable.
- the first seat support member 6 is the seat support base mounted separately from the actual seat, an element of the seat support 4 which cooperates with the base support 2.
- the second seat support member 7 is the seat mounting element, which either includes the seat with seat or - for example, designed as a mounting plate - provides the necessary conditions for a seat mounting.
- the mechanism 1 also includes a backrest support 5, the is connected to the seat support 4 and the base support 2. Connected to the backrest support 5 is the backrest (not shown) of the office chair, which as a rule is provided with a padded leaning surface.
- the backrest support 5 comprises a first backrest support element 9 and a second backrest support element 11, wherein the second backrest support element 11 is rotatable (tiltable) relative to the first backrest support element 8 about an axis of rotation 12 (inclination axis) lying in the chair longitudinal direction 8.
- the first backrest support member 9 is the backrest support base, an element of the backrest support 5, which cooperates with the base support.
- the second backrest support element 11 is the backrest mounting element, which either comprises the backrest with a support surface or - for example, designed as a mounting adapter - provides the necessary conditions for a backrest mounting.
- the backrest support 5 is pivotally connected both to the rear end 13 of the first seat support element 6 seen in the chair longitudinal direction 8 and to the rear end 14 of the base support 2 about transverse pivot axes 15, 16 extending transversely to the chair longitudinal direction 8, wherein the connecting region of the backrest support 5 between them both axes of rotation 15, 16 serves as a rear coupling element 17 between the base support 2 and seat support 4.
- a front coupling element 18 is pivotally connected both to the front longitudinal direction 21 of the base support 2 as viewed in the chair longitudinal direction 8 and to the front end 19 of the first seat support element 6 about front pivot axes 22, 23 extending transversely to the seat longitudinal direction 8.
- the manner in which the pivotable backrest support 5 is coupled to the first seat support element 6 and / or the base support 2 plays no role in the present invention. It can be a direct or an indirect coupling. The same applies to the articulation of the backrest support 5 to the base support 2 and the seat support 4 and thus the specific embodiment of the synchronous movement between the backrest and seat.
- the mechanism 1 is with respect to the central longitudinal plane 25 (see Fig. 2 ), which concerns the actual kinematics, constructed mirror-symmetrically. In that regard, in this description is always based on both sides pairwise existing construction elements of the mechanism 1. In the Fig. 2 and 3 Parts of the mechanism 1, in particular parts of the base support 2 are not shown for reasons of clarity.
- pivot movement, pivoting, pivot axis refer to the movement of the backrest support 5 and the seat support 4 about transverse to the chair longitudinal direction 8 extending axes of rotation 15, 16, 22, 23 at a pivoting of the backrest support 5.
- tilt movement, tilt "Tilting axis”, etc. refer to the movement of the second seat support member 7 and the second
- Backrest support member 11 extending in the chair longitudinal direction 8 axes of rotation 12, 33, 34, 35, 36 wherein the tilting movement may comprise a rotational and a translational component.
- tilting refers to the rotational part of the tilting movement.
- the chair longitudinal direction 8 extends from the front of the chair 26 in the direction of the chair back 27th
- the two seat support elements 6, 7 are arranged one above the other, in particular so that the second seat support member 7 is disposed on the first seat support member 6 and is disposed above the first seat support member 6 and is supported by the first seat support member 6.
- the transverse motion system according to the invention can be used without major structural adjustments with an already existing chair mechanism.
- a second seat support element 7 can be placed as an additional component on an existing mechanical component, wherein the seat support of the conventional mechanism forms the first seat support component 6 of the mechanism 1 according to the invention.
- the first seat support member 6 may be embodied as a mechanical component, which is hinged in a proven manner over transverse to the chair longitudinal direction 8 axes 22, 15 to the base support 2 and the backrest support 5.
- the first seat support member 6 may also be designed as a sliding in the chair longitudinal direction 8 seat slide; in this case, it may for example be suitable for seat depth adjustment.
- the second seat support member 7 is movable relative to the first seat support member 6 on a trajectory 28 which in a plane 29 is transverse to the chair longitudinal direction 8, wherein this plane 29 is preferably a vertical plane (see Fig. 1 ).
- the plane 29 may also be at an angle to the vertical.
- the seat carried by the second seat support element 7 in the chair longitudinal direction 8 tends to tilt laterally.
- the concrete embodiment of the seat is irrelevant to the invention.
- the tilting movement of the second seat support element 7 preferably comprises a translation and a rotation.
- a sideways movement ie a movement of the second seat support element 7 transversely to the chair longitudinal direction 8, combined with a tilting or tilting movement of the second seat support member 7 relative to the first seat support member 6.
- the second seat support member 7 is connected to the first seat support member 6 via at least one link assembly.
- the link assembly comprises two links 31, 32 (coupling elements), one of which is provided on each side of the vertical central longitudinal plane 25 of the chair.
- each link 31, 32 is pivotally connected both to a first axis of rotation 33, 35 rotatably mounted on the first seat support member 6 and about a second axis of rotation 34, 36 on the second seat support member 7, wherein all axes of rotation 33, 34, 35, 36 parallel to each other lie and in Chair longitudinal 8 run.
- all axes of rotation 33, 34, 35, 36 extend below the seat surface of the seat.
- connection of the two seat support elements 6, 7 takes place with the formation of a four-bar linkage, whereby for the second seat support element 7, a virtual pivot point 37 (instantaneous pole) results as the intersection of the two straight lines passing through the links 31, 32 (more precisely their articulation points). Due to the length of the links 31, 32 and / or the position of the articulation points or axes of rotation 33, 34, 35, 36 on the first and second seat support member 6, 7, the distance of the instantaneous pole 37 to the seat support 4 depending on the desired movement / inclination dynamics of the seat are defined.
- the links 31, 32 are designed in the illustrated example as a plate-shaped coupling elements, wherein the hinges for coupling to the first and second seat support member 6, 7 at the lower and upper side edge of the links 31, 32 are provided, so that the axes of rotation 33, 43 , 35, 36 extend parallel to the longitudinal direction of the links 31, 32.
- the number of links 31, 32 on each side of the central longitudinal plane 25 can also be greater. Thus, it is possible depending on the structural design, for example, that instead of a single link 31, 32 per side two or three links per page are provided.
- the instantaneous pole 37 is preferably located below the seat support 4, more precisely below the seat surface of the seat. At the in Fig. 18 illustrated variant, the instantaneous pole 37 is fixed as a real fulcrum in the seat support 4. There is no translation, only one tilting movement.
- the instantaneous pole 37 of the seat support 4 moves during a movement of the second Seat support member 7 transverse to the chair longitudinal direction 8 is always so far away from the seat support 4 that the translational components of the movement are greater than the rotational components.
- the instantaneous pole 37 is also preferably so far away from the seat support 4 that the translation component of the movement of the second seat support member 7 is greater than the rotation / inclination component of the movement.
- the second seat support member 7 does not move on any extremely curved or steep but rather on a rather flat trajectory. That benefits an increased seating comfort.
- the instantaneous pole 37 is close to the ground, ie in the vicinity of the chair support provided at the lower end of the chair column (not shown).
- the Momentanpol 37 moves, as in the Fig. 2 and 3 illustrated, with an inclination of the seat support 4 when using the handlebar assembly 31, 32 (four-bar mechanism) also on a trajectory 38 (see Fig. 3 ) and is not fixed. This is perceived as particularly pleasant for the dynamics of movement. In a pure tilting movement, as in Fig. 18 illustrated, the instantaneous pole 37 is fixed in place.
- the two links 31, 32 Defined by the position of the axes 33, 34, 35, 36 articulation points of the two links 31, 32 form (looking in chair longitudinal direction 8) in the non-deflected state a symmetrical, in particular isosceles trapezoid.
- the two links 31, 32 more precisely the connecting lines 41, 42 between the upper and lower articulation points (axial positions), the trapezoidal legs, the connecting line 43 between the upper articulation points, the upper trapezoid base side and the connecting line 44 between the lower articulation points, the lower trapezoidal base side ,
- the upper base side of the trapezoid is longer than the lower base side.
- spring elements which - acting at suitable locations - holds the second seat support element 7 in the non-inclined ground state in position relative to the first seat support element 6 and, in the inclined state, supports the return of the second seat support element 7 to its basic position . causes.
- spring elements are provided, which are connected on the one hand to the first seat support member 6 and the other on the second seat support member 7 or the handlebars 31, 32 to hold the second seat support member 7 in its not inclined to the right or left basic position.
- the second seat support member 7 is connected to the first seat support member 6 by the second seat support member 7 on a movement path of the second seat support member 7 defining surface 45 of the first seat support member 6 sliding ( Fig. 16 ) or rolling ( Fig. 17 ) rests, directly or indirectly, for example via ball bearings 46 or the like.
- the shape of the surface 45 defines the path of movement of the second Seat support member 7 transverse to the chair longitudinal direction 8. Even with the use of such a rolling or slideway a wandering instantaneous pole 37 can be achieved by the design of the surface 45 of the roll or slide.
- a convexly curved surface 45 of the first seat support element 6 acts in the direction of the second seat support element 7 with a concavely curved surface 47 of the second seat support element 7 in the direction of the first seat support element 6.
- first and second seat support members 6, 7 are two separate components which are mechanically interconnected, e.g. via the coupling elements described (handlebar 31, 32).
- at least one elastic coupling element may be arranged between the first and the second seat support element 6, 7 as a third component, for example in the form of a cuboid or cylindrical buffer element which ensures the required movability of the two seat support elements 6, 7 relative to one another.
- the buffer element is for example constructed so that between a base plate and a cover plate, a rubber-elastic material is arranged.
- Such or similar buffer elements can also be provided between the mutually movable mechanical components 6, 7, etc. as stop elements for limiting movement.
- the seat support elements 6, 7 (with or without buffer elements) is also a one-piece design of the two seat support members 6, 7 possible, preferably using suitable, flexible or elastic connecting material, the transverse movement and / or inclination of the second Seat support member 7 relative to the first seat support member 6 allowed.
- Such a variant is particularly advantageous to produce, for example using a multi-component injection molding process with various suitable plastics.
- the mechanical components are preferably constructed spring-back, that is to say in particular designed for returning the moved or deflected element to the basic position. The otherwise necessary spring elements for erecting the second seat support member 7 and for maintaining the state of equilibrium of the second seat support member 7 in the unoccupied state can then be eliminated.
- the movement of the second backrest support member 11 exclusively comprises a rotation.
- the required for the rotation of the backrest support member 11 central axis of rotation 12 (tilt axis) preferably extends below the seat surface of the seat.
- the axis of rotation 12 of the backrest support 5 extends in the chair longitudinal direction 8 and parallel to the axes of rotation 33, 34, 35, 36 of the link assembly 31, 32, and thus perpendicular to the axes of rotation 15, 16, 22, 23 of base support 2, seat support 4th and backrest support 5.
- the axis of rotation 12 in the vertical direction between the first axes of rotation 33, 35 of the links 31, 32 and the second axes of rotation 34, 36 of the links 31, 32 are arranged.
- the first and the second backrest support element 9, 11 are designed as two separate components, which are mechanically connected to each other, for example via a shock-side connection with rotational degree of freedom.
- a one-piece design of the two backrest support elements 9, 11 is possible, preferably using suitable, flexible or elastic Connecting material, which allows a rotation of the second backrest support member 11 about the rotation axis 12.
- the second backrest support element 11 is preferably designed as a central support arm, which extends centrally backwards away from the chair mechanism 1.
- the second backrest support element 11 is designed as part of a frame 50 for the backrest, for example as a central connecting element between the backrest support 5 and a lower transverse strut of the frame 50.
- the second backrest support member 11 is coupled to the second seat support member 7 such that movement of the second seat support member 7 relative to the first seat support member 6 moves the second back support member 11 relative to the first back support member 9, more specifically, tilting the second back support member 11 to the right left, causes (or vice versa).
- the seat tilts to the right or left
- the backrest A fixed backrest would be less comfortable with a reclining seat.
- the lateral inclination of the seat or the backrest (without a pivoting of the seat support 4 back through the backrest support 5) is in the Fig. 3 . 6 . 10 . 14 shown.
- the tilting movement of the backrest support 5, more precisely the tilting movement of the second backrest support element 11 and thus the backrest, is induced solely and exclusively by the articulation of the second backrest support element 11 to the second seat support element 7.
- the second seat support element 7 moves relative to the first seat support element 6 in the chair longitudinal direction 8
- a lateral inclination of the backrest carried by the second back support element 11 takes place.
- the concrete design of the backrest is irrelevant to the invention.
- the second backrest support member 11 is connected to the second seat support member 7 by a connecting arm 48 of the second backrest support member 11 engages with its free end 49 in a receiving opening 51 of the second seat support member 7 and rests in such a receiving opening 51.
- the initiation of the force or the transmission of the torque from the second seat support element 7 to the second backrest support element 11 takes place exclusively via the connecting arm 48.
- the connecting arm 48 is preferably not rotatably designed, i. the free end 49 is rotatably in the receiving opening 51 a.
- the free end 49 is both axial, i. in chair longitudinal direction 8, as well as vertically slidable in the receiving opening 51, so that the connecting arm 48 - according to the combined translation / rotational movement of the second seat support member 7 on the defined trajectory 28 relative to the first seat support member 6 - can move with limited degrees of freedom such in that it effects a (pure) rotational movement of the second backrest support element 11 about its axis of rotation 12 relative to the first backrest support element 9.
- This coupling is realized, for example, by a sliding block 52 or the like attached to the free end 49 of the connecting arm 48, which is in the manner of a groove formed in the scenery or receiving opening 51 of the second seat support member 7 (there fitting to the vertical side surfaces of the groove) rests.
- the movement of the gate and thus the movement of the second seat support elements 7 is transmitted to the positively driven sliding block 52, wherein the rotational degree of freedom is realized by a suitable rotational connection of the sliding block 52 with the connecting arm 48.
- the division of the backrest support 5 is carried out so that the first backrest support member 9 as seen in chair longitudinal direction 8 front part of the backrest support 5, the connection of the backrest to the base support 2 and the first seat support member 6 realized while the second backrest support member 11, which is in Guatemalalijnscardi 8 seen to the rear of the first backrest support member 9 connects, forms the transition to the backrest, but at the same time is coupled to the second seat support member 7.
- connection or coupling of the second seat support member 7 to the second backrest support member 11 via a number with the second seat support member 7 and the second backrest support member 11 articulated handlebar (not shown), which are preferably designed as the handlebar between the two seat support elements 6, 7 in the manner of a four-bar mechanism, or via other coupling elements.
- a variant has been found in which the inclination of the backrest or of the second backrest support element 11 is different from the inclination of the seat or of the second seat support element 7.
- the invention it is not only possible to realize only a tilting movement of the second seat support member 7 to the right or left, without this leading to a subsequent movement of the backrest support 5;
- only the coupling of the backrest support 5 to the second seat support element 7 must be omitted.
- the tilting movements of the elements involved can also differ from each other.
- the inclination of the second backrest support element 11 and thus the backrest corresponds to the inclination of the second seat support element 7 and thus of the seat.
- the backrest moves in a different relationship to the tilting seat, ie, the two tilt angles are unequal.
- An unequal inclination has been found to be particularly user-friendly, especially when an inclination of the second seat support member 7 by a certain inclination angle follows an inclination of the second seat back support member 11 by a larger inclination angle, as in the Fig. 6 . 10 and 14 shown.
- the position of the axis of rotation 12 of the backrest support 5 is below the connection point of the free end 49 of the connecting arm 48 with the seat support 4, ie below the point at which the sliding block 52 rests in the receiving opening 51.
- An opposing gift of the backrest can accordingly by a reverse arrangement of these two points to each other can be achieved.
- the desired tilt relationship between seat and backrest can be adjusted , In particular, by the structural arrangement of the position of the axes 33, 34, 35, 36, by the defined adjustment of the distances of the axes 33, 34, 35, 36 to each other and / or by the arrangement of the real and virtual pivot points 37 of the components involved Chair Mechanics 1.
- a variant of the invention in which the backrest support 5, more precisely the first backrest support member 9, with the seat support 4, more precisely with the first seat support member 6, coupled such that pivoting of the backrest support 5 in the chair longitudinal direction 8, a movement of the seat support 4 causes in the chair longitudinal direction 8 to a transverse to the chair longitudinal direction 8 pivot axis relative to the base support 2 ("synchronous mechanism").
- synchronous mechanism instead of such a classical synchronous mechanism, other types of mechanisms can be realized by the chair mechanism 1, which is provided with the invention, such as asynchronous mechanisms, luffing mechanisms or mixed types.
- the (tilting) movement of the second seat support element 7 relative to the first seat support element 6 is independent of any other movement of the seat support 4 in the chair longitudinal direction 8, in particular independent of the (5) caused by the backrest support (pivot) movement of the seat support 4. Achieved this constructive and functional independence of the movements by the separation of the seat support 4 in the two seat support members 6, 7. Both movements are independent of each other, that is not coupled to each other, possible, even superimposed on each other.
- the entire seat support 4 is carried along when pivoting the backrest support 5 to the rear and a tilting movement of the second seat support member 7 to the right and left can in pronounceverschwenkten state of the mechanism 1 or in addition to pivoting the backrest done.
- FIG. 4 to 15 This is illustrated by way of example in the Fig. 4 to 15 with reference to the first embodiment.
- Fig. 4 to 7 the mechanics in side view, namely in the starting position ( Fig. 4 ), pivoted backwards ( Fig. 5 ), with laterally inclined seat and backrest ( Fig. 6 ) as well as in an inclined as well as a pivoted position ( Fig. 7 ).
- Fig. 4 to 7 the mechanics in side view, namely in the starting position ( Fig. 4 ), pivoted backwards ( Fig. 5 ), with laterally inclined seat and backrest ( Fig. 6 ) as well as in an inclined as well as a pivoted position ( Fig. 7 ).
- the invention Compared to a conventional chair mechanism, the invention increases the number of degrees of freedom by providing more degrees of freedom for the seat support 4 and optionally also for the backrest support 5. It results over conventional solutions improved movement behavior of the chair to movements of the user. All in the description, the following claims and the drawings illustrated features may be essential to the invention both individually and in any combination.
Landscapes
- Health & Medical Sciences (AREA)
- Dentistry (AREA)
- General Health & Medical Sciences (AREA)
- Chairs Characterized By Structure (AREA)
- Chairs For Special Purposes, Such As Reclining Chairs (AREA)
Abstract
Description
- Die Erfindung betrifft eine Mechanik für einen Stuhl, insbesondere für einen Bürostuhl. Darüber hinaus betrifft die Erfindung einen Stuhl mit einer solchen Stuhlmechanik.
- Als Mechaniken für Bürostühle sind u. a. Synchronmechaniken, Asynchronmechaniken und Wippmechaniken bekannt.
- Unter der Bezeichnung Synchronmechanik werden dabei Baugruppen im Sitzunterbau eines Bürostuhles verstanden, die für eine miteinander gekoppelte, eine bestimmte Relativbewegung von Sitz-und Rückenlehne zueinander mit sich bringende Kinematik sorgen. Auf dem Sitzträger ist der in aller Regel mit einer gepolsterten Sitzfläche versehene Sitz des Bürostuhles montiert. Der Rückenlehnenträger, der sich in gängiger Weise von der eigentlichen Synchronmechanik nach hinten erstreckt, trägt an einem nach oben verlaufenden Ausleger die Rückenlehne des Bürostuhles. Sitzträger und Rückenlehnenträger sind üblicherweise derart gelenkig gekoppelt, daß eine Schwenkbewegung der Rückenlehne nach hinten - wie sie beispielsweise durch ein Anlehnen des Stuhlbenutzers an die Rückenlehne hervorgerufen werden kann - eine Absenkbewegung der Hinterkante des Sitzes nach unten induziert. Dadurch wird der sogenannte "Hemdauszieheffekt" verhindert und der Sitzkomfort erhöht.
- Unter der Bezeichnung Asynchronmechanik werden solche Baugruppen verstanden, bei denen eine Verschwenkung der Rückenlehne keine Bewegung des Sitzträgers hervorruft. Mit anderen Worten bewegt sich bei einem Verschwenken nach hinten ausschließlich die Rückenlehne. Der Sitzkomfort ist im Vergleich zu Synchronmechaniken vermindert. Insbesondere kann bei Asynchronmechaniken aufgrund eines "Auseinanderlaufens" der Bewegungen von Rückenlehne und Sitz der sogenannte "Hemdauszieheffekt" auftreten. Allerdings sind solche Baugruppen wegen ihres vergleichsweise einfachen Aufbaus deutlich preiswerter in der Herstellung als die zuvor beschriebenen Synchronmechaniken.
- Bei Wippmechaniken handelt es sich um vergleichsweise einfach aufgebaute Baugruppen im Sitzunterbau von Stühlen, bei denen der Rückenlehnenträger mehr oder weniger starr mit dem Sitzträger, dem Sitz oder dem Rahmen des Stuhles verbunden ist. Die so entstehende Sitzträger-Rückenlehnenträger-Kombination ist mittels der Wippmechanik um eine quer zu der Stuhllängsrichtung verlaufende Schwenkachse nach hinten verschwenkbar, wenn sich der Benutzer des Stuhls an die Rückenlehne anlehnt. Derartige Wippmechaniken werden oftmals anstelle von Synchronmechaniken in preiswerten Besucher- oder Konferenzstühlen verwendet, um dort eine einfache Wippfunktion zu realisieren. Wegen ihres vergleichsweise einfachen Aufbaus sind Wippmechaniken meist deutlich preiswerter in der Herstellung als die zuvor beschriebenen Mechaniken.
- All diesen Mechaniken ist es gemeinsam, daß eine Schwenkbewegung einzelner oder mehrerer Mechanikkomponenten in Stuhllängsrichtung, d.h. nach vorn oder hinten, möglich ist.
- Eine Aufgabe der vorliegenden Erfindung ist es, den Sitzkomfort von Stuhlmechaniken zu verbessern.
- Diese Aufgabe wird durch eine Mechanik nach Anspruch 1 bzw. durch einen Stuhl nach Anspruch 15 gelöst. Vorteilhafte Ausführungen der Erfindung sind in den Unteransprüchen angegeben.
- Die im Folgenden im Zusammenhang mit der Stuhlmechanik erläuterten Vorteile und Ausgestaltungen gelten sinngemäß auch für den erfindungsgemäßen Stuhl und umgekehrt.
- Die erfindungsgemäße Stuhlmechanik umfaßt einen auf einer Stuhlsäule plazierbaren Basisträger, einen auf dem Basisträger angeordneten Sitzträger sowie einen mit dem Sitzträger verbundenen Rückenlehnenträger und ist dadurch gekennzeichnet,
- daß der Sitzträger ein erstes Sitzträgerelement und ein zweites Sitzträgerelement umfaßt, wobei das zweite Sitzträgerelement relativ zu dem ersten Sitzträgerelement quer zur Stuhllängsrichtung bewegbar ist
- daß der Rückenlehnenträger ein erstes Rückenlehnenträgerelement und ein zweites Rückenlehnenträgerelement umfaßt, wobei das zweite Rückenlehnenträgerelement relativ zu dem ersten Rückenlehnenträgerelement um eine in Stuhllängsrichtung liegende Drehachse drehbar ist.
- Mit der Erfindung wird eine Stuhlmechanik mit einem verbesserten Sitzkomfort geschaffen.
- Eine Kernidee der Erfindung ist es, alternativ oder zusätzlich zu der oben beschriebenen Schwenkbewegung nach vorn und hinten eine Neigebewegung einzelner oder mehrerer Mechanikkomponenten nach rechts und links zu ermöglichen.
- In Ausführungsformen der Erfindung ist hierfür ein zweigeteilter Sitzträger vorgesehen. In anderen Ausführungsformen der Erfindung ist zusätzlich ein zweigeteilter Rückenlehnenträger vorgesehen und die gewünschte Querbewegung des Sitzträgers wird über geeignete Mittel auf den Rückenlehnenträger übertragen oder umgekehrt.
- Vorteilhafterweise sind die Bewegungen der einzelnen Mechanikkomponenten voneinander unabhängig ausführbar. Das bedeutet beispielsweise, daß eine Neigebewegung einer Sitzträgerkomponente in Stuhllängsrichtung gesehen nach rechts oder links unabhängig von einer Schwenkbewegung des Sitzträgers nach vorn oder hinten möglich ist. Dies wird dadurch erreicht, daß gegenüber einer herkömmlichen Stuhlmechanik die Anzahl der zur Verfügung stehenden Freiheitsgrade erhöht wird. Es ergibt sich gegenüber herkömmlichen Lösungen ein verbessertes Bewegungsverhalten des Stuhls auf Bewegungen des Benutzers.
- Ausführungsbeispiele der Erfindung werden nachfolgend anhand der Zeichnungen näher erläutert. Hierbei zeigen:
- Fig. 1-15
- Darstellungen eines ersten Ausführungsbeispiels,
- Fig. 16
- eine Darstellung eines zweiten Ausführungsbeispiels,
- Fig. 17
- eine Darstellung eines dritten Ausführungsbeispiels,
- Fig. 18
- eine Darstellung eines vierten Ausführungsbeispiels.
- Sämtliche Figuren zeigen die Erfindung nicht maßstabsgerecht, dabei lediglich schematisch und nur mit ihren wesentlichen Bestandteilen. Gleiche Bezugszeichen entsprechen dabei Elementen gleicher oder vergleichbarer Funktion.
-
Fig. 1 zeigt eine Mechanik 1 für einen Bürostuhl in Seitenansicht im unverschwenkten und nicht geneigten Zustand.Fig. 2 zeigt die Mechanik 1 ausFig. 1 in einem Querschnitt entlang der Linie II-II.Fig. 3 zeigt die Mechanik 1 ausFig. 2 mit einem seitlich geneigten Sitzträgerelement. - Die Mechanik 1 weist einen Basisträger 2 auf, der mittels einer Konusaufnahme 3 auf das obere Ende einer Stuhlsäule (nicht abgebildet) gesetzt ist. Die Mechanik 1 umfaßt einen Sitzträger 4, der auf dem Basisträger 2 angeordnet und relativ zu dem feststehenden Basisträger 2 in Stuhllängsrichtung 8 nach vorn und hinten bewegbar ist. Auf dem Sitzträger 4 ist der in aller Regel mit einer gepolsterten Sitzfläche versehen Sitz (nicht abgebildet) des Bürostuhls montiert.
- Der Sitzträger 4 umfaßt ein erstes Sitzträgerelement 6 und ein zweites Sitzträgerelement 7, wobei das zweite Sitzträgerelement 7 relativ zu dem ersten Sitzträgerelement 6 quer zur Stuhllängsrichtung 8, d.h. nach rechts und links, bewegbar ist. Bei dem ersten Sitzträgerelement 6 handelt es sich um die getrennt von dem eigentlichen Sitz angebrachte Sitzträgerbasis, ein Element des Sitzträgers 4, das mit dem Basisträger 2 zusammenwirkt. Bei dem zweiten Sitzträgerelement 7 handelt es sich um das Sitzmontageelement, welches entweder den Sitz mit Sitzfläche umfaßt oder aber - beispielsweise ausgeführt als Montageplatte - die für eine Sitzmontage notwendigen Voraussetzungen bietet.
- Die Mechanik 1 umfaßt außerdem einen Rückenlehnenträger 5, der mit dem Sitzträger 4 und dem Basisträger 2 verbunden ist. Mit dem Rückenlehnenträger 5 verbunden ist die in aller Regel mit einer gepolsterten Anlehnfläche versehene Rückenlehne (nicht abgebildet) des Bürostuhls.
- Der Rückenlehnenträger 5 umfaßt ein erstes Rückenlehnenträgerelement 9 und ein zweites Rückenlehnenträgerelement 11, wobei das zweite Rückenlehnenträgerelement 11 relativ zu dem ersten Rückenlehnenträgerelement 8 um eine in Stuhllängsrichtung 8 liegende Drehachse 12 (Neigeachse) drehbar (neigbar) ist. Bei dem ersten Rückenlehnenträgerelement 9 handelt es sich um die Rückenlehnenträgerbasis, ein Element des Rückenlehnenträgers 5, das mit dem Basisträger zusammenwirkt. Bei dem zweiten Rückenlehnenträgerelement 11 handelt es sich um das Rückenlehnenmontageelement, welches entweder die Rückenlehne mit Anlehnfläche umfaßt oder aber - beispielsweise ausgeführt als Montageadapter - die für eine Rückenlehnenmontage notwendigen Voraussetzungen bietet.
- Der Rückenlehnenträger 5 ist sowohl mit dem in Stuhllängsrichtung 8 gesehen hinteren Ende 13 des ersten Sitzträgerelements 6 als auch mit dem hinteren Ende 14 des Basisträgers 2 um quer zur Stuhllängsrichtung 8 verlaufende hintere Drehachsen 15, 16 schwenkbar verbunden, wobei der Verbindungsbereich des Rückenlehnenträgers 5 zwischen diesen beiden Drehachsen 15, 16 als hinteres Koppelelement 17 zwischen Basisträger 2 und Sitzträger 4 dient. Ein vorderes Koppelelement 18 ist sowohl mit dem in Stuhllängsrichtung 8 gesehen vorderen Ende 21 des Basisträgers 2 als auch mit dem vorderen Ende 19 des ersten Sitzträgerelements 6 um quer zur Sitzlängsrichtung 8 verlaufende vordere Drehachsen 22, 23 schwenkbar verbunden.
- Aufgrund der beschriebenen Verbindung des Rückenlehnenträgers 5 mit dem Sitzträger 4 hat ein Verschwenken des Rückenlehnenträgers 5 in Schwenkrichtung 24 nach hinten, d.h. von einer aufrechten Ausgangsposition (
Fig. 1, 2 ,4 ,8 ,12 ) in eine hintere Schwenkposition (Fig. 5 ,9 ,13 ) der Mechanik 1, eine Bewegung des gesamten Sitzträgers 4 relativ zu dem feststehenden Basisträger 2 zur Folge, wobei der Sitzträger 4 in dem hier beschriebenen Beispiel hinten abgesenkt und vorn angehoben wird. - Die Art und Weise der Ankopplung des verschwenkbaren Rückenlehnenträgers 5 an das erste Sitzträgerelement 6 und/oder den Basisträger 2 spielt für die vorliegende Erfindung keine Rolle. Es kann sich dabei um eine direkte oder eine indirekte Ankopplung handeln. Gleiches gilt für die Anlenkung des Rückenlehnenträgers 5 an den Basisträger 2 und den Sitzträger 4 und damit die konkrete Ausgestaltung der Synchronbewegung zwischen Rückenlehne und Sitz.
- Die Mechanik 1 ist bezüglich der Mittellängsebene 25 (siehe
Fig. 2 ), was die eigentliche Kinematik betrifft, spiegelsymmetrisch aufgebaut. Insoweit ist bei dieser Beschreibung immer von beiderseits paarweise vorhandenen Konstruktionselementen der Mechanik 1 auszugehen. In denFig. 2 und3 sind Teile der Mechanik 1, insbesondere Teile des Basisträgers 2 aus Gründen der Übersichtlichkeit nicht dargestellt. - Die Begriffe "Schwenkbewegung, verschwenken, Schwenkachse" usw. beziehen sich auf die Bewegung des Rückenlehnenträgers 5 und des Sitzträgers 4 um quer zur Stuhllängsrichtung 8 verlaufende Drehachsen 15, 16, 22, 23 bei einem Verschwenken des Rückenlehnenträgers 5. Die Begriffe "Neigebewegung, neigen, Neigeachse" usw. beziehen sich auf die Bewegung des zweiten Sitzträgerelements 7 bzw. des zweiten
- Rückenlehnenträgerelements 11 um in Stuhllängsrichtung 8 verlaufende Drehachsen 12, 33, 34, 35, 36 wobei die Neigebewegung einen rotatorischen und einen translatorischen Anteil umfassen kann. Der Begriff "Kippen" bezieht sich auf den rotatorischen Anteil der Neigebewegung. Die Stuhllängsrichtung 8 erstreckt sich von der Stuhlvorderseite 26 in Richtung der Stuhlhinterseite 27.
- Es ist von Vorteil, wenn die beiden Sitzträgerelemente 6, 7 übereinander angeordnet sind, insbesondere so, daß das zweite Sitzträgerelement 7 auf dem ersten Sitzträgerelement 6 angeordnet ist bzw. oberhalb des ersten Sitzträgerelements 6 angeordnet ist bzw. von dem ersten Sitzträgerelement 6 getragen wird. In diesen Fällen kann das erfindungsgemäße Querbewegungssystem ohne größere konstruktive Anpassungen mit einer bereits bestehenden Stuhlmechanik verwendet werden. Beispielsweise kann ein zweites Sitzträgerelement 7 als zusätzliches Bauteil auf eine bestehende Mechanikkomponente aufgesetzt werden, wobei der Sitzträger der herkömmlichen Mechanik die erste Sitzträgerkomponente 6 der erfindungsgemäßen Mechanik 1 bildet.
- Das erste Sitzträgerelement 6 kann als Mechanikkomponente ausgeführt sein, die in bewährter Weise über quer zur Stuhllängsrichtung 8 verlaufende Achsen 22, 15 an den Basisträger 2 bzw. den Rückenlehnenträger 5 angelenkt ist. Das erste Sitzträgerelement 6 kann aber auch als in Stuhllängsrichtung 8 verschiebbarer Sitzschlitten ausgeführt sein; in diesem Fall kann es beispielsweise geeignet zur Sitztiefenverstellung sein.
- Es hat sich als besonders vorteilhaft herausgestellt, daß das zweite Sitzträgerelement 7 relativ zu dem ersten Sitzträgerelement 6 auf einer Bahnkurve 28 bewegbar ist, die in einer Ebene 29 quer zur Stuhllängsrichtung 8 liegt, wobei es sich bei dieser Ebene 29 vorzugsweise um eine vertikale Ebene (siehe
Fig. 1 ) handelt. Die Ebene 29 kann aber auch schräg zur Vertikalen liegen. - Besonders vorteilhaft ist es darüber hinaus, wenn sich bei einer Bewegung des zweiten Sitzträgerelements 7 relativ zu dem ersten Sitzträgerelement 6 der von dem zweiten Sitzträgerelement 7 getragene Sitz in Stuhllängsrichtung 8 gesehen seitlich neigt. Die konkrete Ausführung des Sitzes ist dabei für die Erfindung unerheblich.
- Die Neigebewegung des zweiten Sitzträgerelements 7 umfaßt dabei vorzugsweise eine Translation und eine Rotation. Mit anderen Worten wird eine Seitwärtsbewegung, also eine Bewegung des zweiten Sitzträgerelements 7 quer zur Stuhllängsrichtung 8, mit einer Kipp- bzw. Neigebewegung des zweiten Sitzträgerelements 7 relativ zu dem ersten Sitzträgerelement 6 kombiniert. Alternativ, aber nicht vorzugsweise, erfolgt eine ausschließliche Rotation des zweiten Sitzträgerelements 7, d.h. eine reine Kippbewegung, siehe
Fig. 18 . - In der ersten Ausführungsform (
Fig. 1 bis 15 ) ist das zweite Sitzträgerelement 7 mit dem ersten Sitzträgerelement 6 über wenigstens eine Lenkeranordnung verbunden. Dabei umfaßt die Lenkeranordnung zwei Lenker 31, 32 (Koppelelemente), von denen jeweils einer auf jeder Seite der vertikalen Mittellängsebene 25 des Stuhls vorgesehen ist. Dabei ist jeder Lenker 31, 32 sowohl um eine erste Drehachse 33, 35 drehbar an dem ersten Sitzträgerelement 6 als auch um eine zweite Drehachse 34, 36 drehbar an dem zweiten Sitzträgerelement 7 angelenkt, wobei alle Drehachsen 33, 34, 35, 36 parallel zueinander liegen und in Stuhllängsrichtung 8 verlaufen. Zugleich verlaufen alle Drehachsen 33, 34, 35, 36 unterhalb der Sitzfläche des Sitzes. - Derart ausgeführt erfolgt die Verbindung der beiden Sitzträgerelemente 6, 7 miteinander unter Ausbildung einer Viergelenkmechanik, wobei sich für das zweite Sitzträgerelement 7 ein virtueller Drehpunkt 37 (Momentanpol) als Schnittpunkt der beiden durch die Lenker 31, 32 (genauer deren Anlenkpunkte) verlaufenden Geraden ergibt. Durch die Länge der Lenker 31, 32 und/oder die Lage der Anlenkpunkte bzw. Drehachsen 33, 34, 35, 36 an dem ersten und zweiten Sitzträgerelement 6, 7 kann der Abstand des Momentanpols 37 zum Sitzträger 4 je nach gewünschter Bewegungs-/Neigungsdynamik des Sitzes definiert werden.
- Die Lenker 31, 32 sind in dem illustrierten Beispiel als plattenförmige Koppelelemente ausgeführt, wobei die Drehgelenke zur Ankopplung an das erste und zweite Sitzträgerelement 6, 7 an der unteren und oberen Seitenkante der Lenker 31, 32 vorgesehen sind, so daß die Drehachsen 33, 43, 35, 36 parallel zu der Längsrichtung der Lenker 31, 32 verlaufen. Die Anzahl der Lenker 31, 32 auf jeder Seite der Mittellängsebene 25 kann auch größer sein. So ist es je nach konstruktiver Ausführung beispielsweise möglich, daß anstelle eines einzigen Lenkers 31, 32 pro Seite zwei oder drei Lenker pro Seite vorgesehen sind.
- Der Momentanpol 37 befindet sich vorzugsweise unterhalb des Sitzträgers 4, genauer unterhalb der Sitzfläche des Sitzes. Bei der in
Fig. 18 illustrierten Variante befindet sich der Momentanpol 37 als realer Drehpunkt feststehend im Sitzträger 4. Es findet keine Translation statt, nur eine Kippbewegung. - Es hat sich als besonders vorteilhaft erwiesen, wenn sich der Momentanpol 37 des Sitzträgers 4 bei einer Bewegung des zweiten Sitzträgerelements 7 quer zur Stuhllängsrichtung 8 stets so weit entfernt von dem Sitzträger 4 befindet, daß die Translationsanteile der Bewegung größer sind als die Rotationsanteile. Der Momentanpol 37 befindet sich außerdem vorzugsweise so weit weg von dem Sitzträger 4, daß die Translationskomponente der Bewegung des zweiten Sitzträgerelements 7 größer ist als die Rotations-/Neigungskomponente der Bewegung. Anders ausgedrückt bewegt sich das zweite Sitzträgerelement 7 auf keiner extrem gekrümmten bzw. steilen, sondern statt dessen auf eine eher flachen Bahnkurve. Das kommt einem erhöhter Sitzkomfort zugute. Vorzugsweise befindet sich der Momentanpol 37 in Bodennähe, also in der Nähe des am unteren Ende der Stuhlsäule vorgesehenen Stuhlträgers (nicht abgebildet).
- Der Momentanpol 37 bewegt sich, wie in den
Fig. 2 und3 illustriert, bei einer Neigung des Sitzträgers 4 bei Anwendung der Lenkeranordnung 31, 32 (Viergelenkmechanik) ebenfalls auf einer Bahnkurve 38 (sieheFig. 3 ) und ist nicht feststehend. Dies wird als besonders angenehm für die Bewegungsdynamik empfunden. Bei einer reinen Kippbewegung, wie inFig. 18 dargestellt, ist der Momentanpol 37 lagefest. - Die durch die Lage der Achsen 33, 34, 35, 36 definierten Anlenkpunkte der beiden Lenker 31, 32 bilden (mit Blick in Stuhllängsrichtung 8) im nicht ausgelenkten Zustand ein symmetrisches, insbesondere gleichschenkeliges Trapez. Dabei bilden die beiden Lenker 31, 32, genauer gesagt die Verbindungslinien 41, 42 zwischen den oberen und unteren Anlenkpunkten (Achslagen), die Trapezschenkel, die Verbindungslinie 43 zwischen den oberen Anlenkpunkten die obere Trapezgrundseite und die Verbindungslinie 44 zwischen den unteren Anlenkpunkten die untere Trapezgrundseite.
- Aufgrund der Lage der Lenker 31, 32 zum Erreichen eines unterhalb des Sitzträgers 4 angeordneten Momentanpols 37 ist die obere Grundseite des Trapezes länger ist als die untere Grundseite. Anders ausgedrückt ist der Abstand der unteren Achsen, also der Achsen 33, 35 der Gelenke der Verbindung der Lenker 31, 32 mit dem ersten (unteren) Sitzträgerelement 6, geringer als der Abstand der oberen Achsen, also der Achsen 34, 36 der Gelenke der Verbindung der Lenker 31, 32, mit dem zweiten (oberen) Sitzträgerelement 7. Aus diesem Grund handelt es sich um ein labiles System, das zum Kippen neigt. Es ist daher eine Anzahl Federelemente (nicht dargestellt) vorgesehen, die - an geeigneten Stellen angreifend - das zweite Sitzträgerelement 7 im nicht geneigten Grundzustand in Position zu dem ersten Sitzträgerelement 6 hält und im geneigten Zustand ein Rückführen des zweiten Sitzträgerelements 7 in dessen Grundstellung unterstützt bzw. bewirkt. Insbesondere sind Federelemente vorgesehen, die einerseits an dem ersten Sitzträgerelement 6 und andererseits an dem zweiten Sitzträgerelement 7 oder an den Lenkern 31, 32 angebunden sind, um das zweite Sitzträgerelement 7 in seiner nicht nach rechts oder links geneigten Grundstellung zu halten.
- In weiteren Ausführungsformen sind andere Arten der Verbindung der beiden Sitzträgerelemente 6, 7 vorgesehen. In einer zweiten und dritten Ausführungsform (
Fig. 16 und 17 ) ist das zweite Sitzträgerelement 7 mit dem ersten Sitzträgerelement 6 verbunden, indem das zweite Sitzträgerelement 7 auf einer die Bewegungsbahn des zweiten Sitzträgerelements 7 definierenden Oberfläche 45 des ersten Sitzträgerelements 6 gleitend (Fig. 16 ) oder rollend (Fig. 17 ) aufliegt, und zwar unmittelbar oder mittelbar, z.B. über Kugellager 46 oder dergleichen. Die Form der Oberfläche 45 definiert dabei die Bewegungsbahn des zweiten Sitzträgerelements 7 quer zur Stuhllängsrichtung 8. Auch bei Anwendung einer solchen Roll- oder Gleitbahn kann ein wandernder Momentanpol 37 durch die Gestaltung der Oberfläche 45 der Roll-oder Gleitbahn erreicht werden. Vorzugsweise wirkt dabei eine in Richtung des zweiten Sitzträgerelements 7 konvex gewölbte Oberfläche 45 des ersten Sitzträgerelements 6 mit einer in Richtung des ersten Sitzträgerelements 6 konkav gewölbte Oberfläche 47 des zweiten Sitzträgerelements 7 zusammen. - Es ist aber nicht nur möglich, das erste und das zweite Sitzträgerelement 6, 7 als zwei voneinander getrennte Bauteile auszuführen, die mechanisch miteinander verbunden sind, z.B. über die beschriebenen Koppelelemente (Lenker 31, 32). Alternativ dazu kann zwischen dem ersten und dem zweiten Sitzträgerelement 6, 7 als drittes Bauteil wenigstens ein elastisches Koppelelement (nicht abgebildet) angeordnet sein, beispielsweise in Form eines quader- oder zylinderförmigen Pufferelements, welches die benötigte Bewegbarkeit der beiden Sitzträgerelemente 6, 7 zueinander sicherstellt. Dabei ist das Pufferelement beispielsweise so aufgebaut, daß zwischen einer Grundplatte und einer Deckplatte ein gummielastischer Werkstoff angeordnet ist. Derartige oder ähnliche Pufferelemente können auch zwischen den zueinander bewegbaren Mechanikkomponenten 6, 7 usw. als Anschlagselemente zur Bewegungsbegrenzung vorgesehen sein.
- Alternativ zu einer mehrteiligen Gestaltung der Sitzträgerelemente 6, 7 (mit oder ohne Pufferelemente) ist auch eine einteilige Ausführung der beiden Sitzträgerelemente 6, 7 möglich, vorzugsweise unter Verwendung von geeignetem, flexiblen bzw. elastischen Verbindungsmaterial, das eine Querbewegung und/oder Neigung des zweiten Sitzträgerelements 7 relativ zu dem ersten Sitzträgerelement 6 erlaubt. Eine solche Variante ist besonders vorteilhaft herstellbar, beispielsweise unter Verwendung eines Mehrkomponenten-Spritzgußverfahrens mit verschiedenen geeigneten Kunststoffen. Die Mechanikkomponenten sind in diesem Fall vorzugsweise rückfedernd konstruiert, d.h. insbesondere zum Zurückführen des bewegten bzw. ausgelenkten Elements in die Grundposition ausgebildet. Die sonst notwendigen Federelemente zum Aufrichten des zweiten Sitzträgerelements 7 bzw. zum Halten des Gleichgewichtszustands des zweiten Sitzträgerelements 7 im unbesetzten Zustand können dann wegfallen.
- In der in den
Fig. 1 bis 15 illustrierten Variante umfaßt die Bewegung des zweiten Rückenlehnenträgerelements 11 ausschließlich eine Rotation. Die zur Drehung des Rückenlehnenträgerelements 11 erforderliche zentrale Drehachse 12 (Neigeachse) verläuft dabei vorzugsweise unterhalb der Sitzfläche des Sitzes. Im dargestellten Beispiel verläuft die Drehachse 12 des Rückenlehnenträgers 5 in Stuhllängsrichtung 8 und parallel zu den Drehachsen 33, 34, 35, 36 der Lenkeranordnung 31, 32, und somit senkrecht zu den Drehachsen 15, 16, 22, 23 von Basisträger 2, Sitzträger 4 und Rückenlehnenträger 5. Außerdem ist die Drehachse 12 in vertikaler Richtung zwischen den ersten Drehachsen 33, 35 der Lenker 31, 32 und den zweiten Drehachsen 34, 36 der Lenker 31, 32 angeordnet. - Vorzugsweise sind das erste und das zweite Rückenlehnenträgerelement 9, 11 als zwei voneinander getrennte Bauteile ausgeführt, die mechanisch miteinander verbunden sind, z.B. über eine stoßseitige Verbindung mit rotatorischem Freiheitsgrad. Alternativ ist jedoch auch eine einteilige Ausführung der beiden Rückenlehnenträgerelemente 9, 11 möglich, vorzugsweise unter Verwendung von geeignetem, flexiblen bzw. elastischen Verbindungsmaterial, das ein Verdrehen des zweiten Rückenlehnenträgerelements 11 um die Drehachse 12 erlaubt.
- Das zweite Rückenlehnenträgerelement 11 ist vorzugsweise als zentraler Tragarm ausgeführt, der sich mittig nach hinten von der Stuhlmechanik 1 weg erstreckt. Alternativ ist das zweite Rückenlehnenträgerelement 11 als Teil eines Rahmens 50 für die Rückenlehne ausgeführt, beispielsweise als zentrales Verbindungselement zwischen dem Rückenlehnenträger 5 und einer unteren Querstrebe des Rahmens 50.
- Vorzugsweise ist das zweite Rückenlehnenträgerelement 11 mit dem zweiten Sitzträgerelement 7 derart gekoppelt, daß eine Bewegung des zweiten Sitzträgerelements 7 relativ zu dem ersten Sitzträgerelement 6 eine Bewegung des zweiten Rückenlehnenträgerelements 11 relativ zu dem ersten Rückenlehnenträgerelement 9, genauer eine Neigung des zweiten Rückenlehnenträgerelements 11 nach rechts oder links, bewirkt (oder umgekehrt). Mit anderen Worten findet eine vorteilhafte Kombination der beiden Neigebewegungen statt. Nicht nur der Sitz neigt sich (nach rechts oder links), sondern auch die Rückenlehne. Eine feststehende Rückenlehne wäre bei einem sich neigenden Sitz weniger komfortabel. Die seitliche Neigung des Sitzes bzw. der Rückenlehne (ohne eine Verschwenkung des Sitzträgers 4 nach hinten durch den Rückenlehnenträger 5) ist in den
Fig. 3 ,6 ,10 ,14 dargestellt. - Die Neigebewegung des Rückenlehnenträgers 5, genauer gesagt die Neigebewegung des zweiten Rückenlehnenträgerelements 11 und damit der Rückenlehne, wird allein und ausschließlich durch die Anlenkung des zweiten Rückenlehnenträgerelements 11 an das zweite Sitzträgerelement 7 induziert.
- Vorzugsweise erfolgt bei einer Bewegung des zweiten Sitzträgerelements 7 relativ zu dem ersten Sitzträgerelement 6 in Stuhllängsrichtung 8 gesehen eine seitliche Neigung der von dem zweiten Rückenlehnenträgerelement 11 getragenen Rückenlehne. Die konkrete Ausführung der Rückenlehne ist dabei für die Erfindung unerheblich.
- Bei der in den
Fig. 1 bis 15 dargestellten Variante ist das zweite Rückenlehnenträgerelement 11 mit dem zweiten Sitzträgerelement 7 verbunden, indem ein Verbindungsarm 48 des zweiten Rückenlehnenträgerelements 11 mit seinem freien Ende 49 in eine Aufnahmeöffnung 51 des zweiten Sitzträgerelements 7 eingreift bzw. in einer solchen Aufnahmeöffnung 51 einliegt. Die Einleitung der Kraft bzw. die Übertragung des Drehmoments von dem zweiten Sitzträgerelement 7 auf das zweite Rückenlehnenträgerelement 11 erfolgt ausschließlich über den Verbindungsarm 48. - Der Verbindungsarm 48 ist dabei vorzugsweise nicht drehfest ausgeführt, d.h. das Freiende 49 liegt drehbar in der Aufnahmeöffnung 51 ein. Das Freiende 49 ist dabei sowohl axial, d.h. in Stuhllängsrichtung 8, als auch vertikal in der Aufnahmeöffnung 51 verschiebbar, so daß sich der Verbindungsarm 48 - entsprechend der kombinierten Translations-/Rotationsbewegung des zweiten Sitzträgerelements 7 auf der definierten Bahnkurve 28 relativ zu dem ersten Sitzträgerelement 6 - mit begrenzten Freiheitsgraden mitbewegen kann derart, daß er eine (reine) Drehbewegung des zweiten Rückenlehnenträgerelements 11 um dessen Drehachse 12 relativ zu dem ersten Rückenlehnenträgerelement 9 bewirkt.
- Realisiert wird diese Ankopplung z.B. durch einen am freien Ende 49 des Verbindungsarmes 48 angebrachten Kulissenstein 52 oder dergleichen, der in der nach Art einer Nut ausgebildeten Kulisse bzw. Aufnahmeöffnung 51 des zweiten Sitzträgerelements 7 (dort an den vertikalen Seitenflächen der Nut anliegend) einliegt. Dabei wird die Bewegung der Kulisse und damit die Bewegung des zweiten Sitzträgerelemente 7 auf den zwangsgeführten Kulissenstein 52 übertragen, wobei der rotatorische Freiheitsgrad durch eine geeignete Drehverbindung des Kulissensteins 52 mit dem Verbindungsarm 48 verwirklicht wird.
- Die Zweiteilung des Rückenlehnenträgers 5 erfolgt dabei so, daß das erste Rückenlehnenträgerelement 9 wie der in Stuhllängsrichtung 8 gesehen vordere Teil des Rückenlehnenträgers 5 die Anbindung der Rückenlehne an den Basisträger 2 und das erste Sitzträgerelement 6 realisiert, während das zweite Rückenlehnenträgerelement 11, welches sich in Stuhllängsrichtung 8 gesehen nach hinten an das erste Rückenlehnenträgerelement 9 anschließt, den Übergang zu der Rückenlehne bildet, zugleich jedoch an das zweite Sitzträgerelement 7 angekoppelt ist.
- Alternativ erfolgt die Verbindung bzw. Ankopplung des zweiten Sitzträgerelements 7 an das zweite Rückenlehnenträgerelement 11 über eine Anzahl mit dem zweiten Sitzträgerelement 7 und dem zweiten Rückenlehnenträgerelement 11 gelenkig verbundene Lenker (nicht abgebildet), die vorzugsweise so ausgeführt sind, wie die Lenker zwischen den beiden Sitzträgerelementen 6, 7 nach Art einer Viergelenkmechanik, oder aber über andere Koppelelemente. Alternativ erfolgt die Verbindung bzw. Ankopplung des zweiten Sitzträgerelements 7 an das zweite Rückenlehnenträgerelement 11 über eine einteilige Ausführung von Sitzträgerelement 7 und Rückenlehnenträgerelement 11 unter Verwendung eines geeigneten, flexiblen bzw. elastischen Materials.
- Als besonders vorteilhaft hat sich eine Variante herausgestellt, bei der die Neigung der Rückenlehne bzw. des zweiten Rückenlehnenträgerelements 11 von der Neigung des Sitzes bzw. des zweiten Sitzträgerelements 7 verschieden ist. Mit der Erfindung ist es also nicht nur möglich, ausschließlich eine Neigebewegung des zweiten Sitzträgerelements 7 nach rechts oder links zu verwirklichen, ohne daß dies zu einer Folgebewegung des Rückenlehnenträgers 5 führt; hierfür muß lediglich die Ankopplung des Rückenlehnenträgers 5 an das zweite Sitzträgerelement 7 entfallen. Die Neigebewegungen der beteiligten Elemente können auch voneinander abweichen. Im einfachsten Fall entspricht zwar die Neigung des zweiten Rückenlehnenträgerelements 11 und damit der Rückenlehne der Neigung des zweiten Sitzträgerelements 7 und damit des Sitzes. Vorzugsweise bewegt sich die Rückenlehne jedoch in einem abweichenden Verhältnis zu dem sich neigenden Sitz, d.h. die beiden Neigungswinkel sind ungleich. Ein ungleiches Neigungsmaß hat sich als besonders benutzerfreundlich herausgestellt, insbesondere dann, wenn einer Neigung des zweiten Sitzträgerelements 7 um einen bestimmten Neigungswinkel eine Neigung des zweiten Rückenlehnenträgerelements 11 um einen größeren Neigungswinkel folgt, wie in den
Fig. 6 ,10 und14 dargestellt. - Vorzugsweise befindet sich die Lage der Drehachse 12 des Rückenlehnenträgers 5 unterhalb des Verbindungspunktes des Freiendes 49 des Verbindungsarmes 48 mit dem Sitzträger 4, also unterhalb des Punktes, an dem der Kulissenstein 52 in der Aufnahmeöffnung 51 einliegt. Dadurch wird erreicht, daß sich die Rückenlehne in die gleiche Richtung neigt, wie der Sitz. Eine gegenläufige Verschenkung der Rückenlehne (Verschwenken in die entgegengesetzte Richtung) kann entsprechend durch eine umgekehrte Anordnung dieser beiden Punkte zueinander erreicht werden.
- Je weiter der Momentanpol 37 des zweiten Sitzträgerelements 7 von der ortsfesten Drehachse 12 des Rückenlehnenträgers 5 entfernt ist, desto größer ist die Abweichung der Neigungsbewegung des zweiten Rückenlehnenträgerelements 11 zu der des zweiten Sitzträgerelements 7. Es kann somit das gewünschte Neigungsverhältnis zwischen Sitz und Rückenlehne eingestellt werden, insbesondere durch die konstruktive Anordnung der Lage der Achsen 33, 34, 35, 36, durch die definierte Einstellung der Abstände der Achsen 33, 34, 35, 36 zueinander und/oder durch die Anordnung der realen und virtuellen Drehpunkte 37 der beteiligten Komponenten der Stuhlmechanik 1.
- Als besonders vorteilhaft gilt eine Variante der Erfindung, bei welcher der Rückenlehnenträger 5, genauer das erste Rückenlehnenträgerelement 9, mit dem Sitzträger 4, genauer mit dem ersten Sitzträgerelement 6, derart gekoppelt ist, daß ein Verschwenken des Rückenlehnenträgers 5 in Stuhllängsrichtung 8 eine Bewegung des Sitzträgers 4 in Stuhllängsrichtung 8 um eine quer zur Stuhllängsrichtung 8 verlaufende Schwenkachse relativ zu dem Basisträger 2 bewirkt ("Synchronmechanik"). Anstelle einer solchen klassischen Synchronmechanik können von der Stuhlmechanik 1, die mit der Erfindung versehen wird, aber auch andere Mechaniktypen verwirklicht sein, wie Asynchronmechaniken, Wippmechaniken oder Mischtypen.
- Dabei ist die (Neige-) Bewegung des zweiten Sitzträgerelements 7 relativ zu dem ersten Sitzträgerelement 6 unabhängig von einer sonstigen Bewegung des Sitzträgers 4 in Stuhllängsrichtung 8, insbesondere unabhängig von der von dem Rückenlehnenträger 5 bewirkten (Schwenk-)Bewegung des Sitzträgers 4. Erreicht wird diese konstruktive und funktionale Unabhängigkeit der Bewegungen durch die Trennung des Sitzträgers 4 in die zwei Sitzträgerelemente 6, 7. Beide Bewegungen sind unabhängig voneinander, d.h. nicht aneinander gekoppelt, möglich, auch einander überlagernd. Beispielsweise wird unabhängig von einer Neigebewegung des zweiten Sitzträgerelements 7 nach rechts oder links der gesamte Sitzträger 4 bei einem Verschwenken des Rückenlehnenträgers 5 nach hinten mitgenommen und eine Neigebewegung des zweiten Sitzträgerelements 7 nach rechts und links kann im nichtverschwenkten Zustand der Mechanik 1 oder aber auch zusätzlich zu einem Verschwenken der Rückenlehne erfolgen.
- Illustriert wird dies beispielhaft in den
Fig. 4 bis 15 anhand des ersten Ausführungsbeispiels. Darin zeigen dieFig. 4 bis 7 die Mechanik in Seitenansicht, nämlich in der Ausgangsstellung (Fig. 4 ), nach hinten verschwenkt (Fig. 5 ), mit seitlich geneigtem Sitz und Rückenlehne (Fig. 6 ) sowie in einer sowohl geneigten als auch verschwenkten Stellung (Fig. 7 ) . Es zeigen dieFig. 8 bis 11 die Mechanik von vorn, nämlich in der Ausgangsstellung (Fig. 8 ), nach hinten verschwenkt (Fig. 9 ), mit seitlich geneigtem Sitz und Rückenlehne (Fig. 10 ) sowie in einer sowohl geneigten als auch verschwenkten Stellung (Fig. 11 ). Es zeigen dieFig. 12 bis 15 die Mechanik von hinten, nämlich in der Ausgangsstellung (Fig. 12 ), nach hinten verschwenkt (Fig. 13 ), mit seitlich geneigtem Sitz und Rückenlehne (Fig. 14 ) sowie in einer sowohl geneigten als auch verschwenkten Stellung (Fig. 15 ) . - Gegenüber einer herkömmlichen Stuhlmechanik wird mit der Erfindung die Anzahl der Freiheitsgrade erhöht, indem für den Sitzträger 4 und optionale auch für den Rückenlehnenträger 5 weitere Freiheitsgrade vorgesehen werden. Es ergibt sich gegenüber herkömmlichen Lösungen ein verbessertes Bewegungsverhalten des Stuhls auf Bewegungen des Benutzers. Alle in der Beschreibung, den nachfolgenden Ansprüchen und der Zeichnung dargestellten Merkmale können sowohl einzeln als auch in beliebiger Kombination miteinander erfindungswesentlich sein.
-
- 1
- Mechanik
- 2
- Basisträger
- 3
- Konusaufnahme
- 4
- Sitzträger
- 5
- Rückenlehnenträger
- 6
- erstes Sitzträgerelement
- 7
- zweites Sitzträgerelement
- 8
- Stuhllängsrichtung
- 9
- erstes Rückenlehnenträgerelement
- 10
- (frei)
- 11
- zweites Rückenlehnenträgerelement
- 12
- Drehachse des Rückenlehnenträgers
- 13
- hinteres Ende des ersten Sitzträgerelements
- 14
- hinteres Ende des Basisträgers
- 15
- hintere Drehachse
- 16
- hintere Drehachse
- 17
- hinteres Koppelelement
- 18
- vorderes Koppelelement
- 19
- vorderes Ende des ersten Sitzträgerelements
- 20
- (frei)
- 21
- vorderes Ende des Basisträgers
- 22
- vordere Drehachse
- 23
- vordere Drehachse
- 24
- Schwenkrichtung
- 25
- Mittellängsebene
- 26
- Stuhlvorderseite
- 27
- Stuhlhinterseite
- 28
- Bahnkurve
- 29
- Ebene der Bahnkurve
- 30
- (frei)
- 31
- erster Lenker
- 32
- zweiter Lenker
- 33
- erste Drehachse des ersten Lenkers
- 34
- zweite Drehachse des ersten Lenkers
- 35
- erste Drehachse des zweiten Lenkers
- 36
- zweite Drehachse des zweiten Lenkers
- 37
- virtueller Drehpunkt, Momentanpol
- 38
- Bahnkurve des Momentanpols
- 39
- (frei)
- 40
- (frei)
- 41
- vertikale Verbindungslinie
- 42
- vertikale Verbindungslinie
- 43
- horizontale Verbindungslinie
- 44
- horizontale Verbindungslinie
- 45
- Oberfläche des ersten Sitzträgerelements, Roll-/Gleitbahn
- 46
- Kugellager
- 47
- Oberfläche des zweiten Sitzträgerelements
- 48
- Verbindungsarm
- 49
- Freiende
- 50
- Rahmen
- 51
- Aufnahmeöffnung
- 52
- Kulissenstein
Claims (14)
- Mechanik (1) für einen Stuhl, insbesondere für einen Bürostuhl,
mit einem auf einer Stuhlsäule plazierbaren Basisträger (2), mit einem auf dem Basisträger (2) angeordneten, relativ zu dem Basisträger (2) in Stuhllängsrichtung (8) bewegbaren Sitzträger (4),
und mit einem mit dem Sitzträger (4) verbundenen Rückenlehnenträger (5),
dadurch gekennzeichnet,daß der Sitzträger (4) ein erstes Sitzträgerelement (6) und ein zweites Sitzträgerelement (7) umfaßt, wobei das zweite Sitzträgerelement (7) relativ zu dem ersten Sitzträgerelement (6) quer zur Stuhllängsrichtung (8) bewegbar istund/oderdaß der Rückenlehnenträger (5) ein erstes Rückenlehnenträgerelement (9) und ein zweites Rückenlehnenträgerelement (11) umfaßt, wobei das zweite Rückenlehnenträgerelement (11) relativ zu dem ersten Rückenlehnenträgerelement (9) um eine in Stuhllängsrichtung (8) liegende Drehachse (12) drehbar ist. - Mechanik (1) nach Anspruch 1, wobei sich bei einer Bewegung des zweiten Sitzträgerelements (7) relativ zu dem ersten Sitzträgerelement (6) der von dem zweiten Sitzträgerelement (7) getragene Sitz in Stuhllängsrichtung (8) gesehen seitlich neigt.
- Mechanik (1) nach Anspruch 1 oder 2, wobei die Bewegung des zweiten Sitzträgerelements (7) eine Translation und eine Rotation umfaßt.
- Mechanik (1) nach einem der Ansprüche 1 bis 3, wobei das zweite Sitzträgerelement (7) mit dem ersten Sitzträgerelement (6) über wenigstens eine Lenkeranordnung (31, 32) verbunden ist.
- Mechanik (1) nach Anspruch 4, wobei die Lenkeranordnung zwei Lenker (31, 32) umfaßt, wobei jeder Lenker (31, 32) sowohl um eine erste Drehachse (33, 35) drehbar an dem ersten Sitzträgerelement (6) als auch um eine zweite Drehachse (34, 36) drehbar an dem zweiten Sitzträgerelement (7) angelenkt ist, wobei alle Drehachsen (33, 34, 35, 36) parallel zueinander liegen und in Stuhllängsrichtung (8) verlaufen.
- Mechanik (1) nach Anspruch 5, wobei sich der Momentanpol (37) des zweiten Sitzträgerelements (7) bei einer Bewegung des zweiten Sitzträgerelements (7) quer zur Stuhllängsrichtung (8) stets so weit entfernt von dem Sitzträger (4) befindet, daß die Translationsanteile der Bewegung größer sind als die Rotationsanteile.
- Mechanik (1) nach einem der Ansprüche 1 bis 3, wobei das zweite Sitzträgerelement (7) auf einer Oberfläche (45) des ersten Sitzträgerelements (6) aufliegt.
- Mechanik (1) nach einem der Ansprüche 1 bis 7, wobei das zweite Rückenlehnenträgerelement (11) mit dem zweiten Sitzträgerelement (7) gekoppelt ist derart, daß eine Bewegung des zweiten Sitzträgerelements (7) relativ zu dem ersten Sitzträgerelement (6) eine Bewegung des zweiten Rückenlehnenträgerelements (11) relativ zu dem ersten Rückenlehnenträgerelement (9) bewirkt.
- Mechanik (1) nach einem der Ansprüche 1 bis 8, wobei sich bei einer Bewegung des zweiten Sitzträgerelements (7) relativ zu dem ersten Sitzträgerelement (6) die von dem zweiten Rückenlehnenträgerelement (11) getragene Rückenlehne in Stuhllängsrichtung (8) gesehen seitlich neigt.
- Mechanik (1) nach einem der Ansprüche 1 bis 9, wobei die Neigung der Rückenlehne von der Neigung des Sitzes verschieden ist.
- Mechanik (1) nach einem der Ansprüche 1 bis 10, wobei das zweite Rückenlehnenträgerelement (11) mit dem zweiten Sitzträgerelement (7) verbunden ist, indem ein Verbindungsarm (48) des zweiten Rückenlehnenträgerelements (11) in eine Aufnahmeöffnung (51) des zweiten Sitzträgerelements (7) eingreift.
- Mechanik (1) nach einem der Ansprüche 1 bis 11, wobei der Rückenlehnenträger (5) mit dem Sitzträger (4) gekoppelt ist derart, daß ein Verschwenken des Rückenlehnenträgers (5) eine Bewegung des Sitzträgers (4) in Stuhllängsrichtung (8) relativ zu dem Basisträger (2) bewirkt.
- Mechanik (1) nach Anspruch 12, wobei die Bewegung des zweiten Sitzträgerelements (7) relativ zu dem ersten Sitzträgerelement (6) unabhängig von der von dem Rückenlehnenträger (5) bewirkten Bewegung des Sitzträgers (4) ist.
- Stuhl, insbesondere Bürostuhl, mit einer Mechanik (1) nach einem der Ansprüche 1 bis 13.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017100117 | 2017-01-04 | ||
| DE202017102909.3U DE202017102909U1 (de) | 2017-01-04 | 2017-05-15 | Stuhl mit einteiliger Sitzschale |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3345507A1 true EP3345507A1 (de) | 2018-07-11 |
| EP3345507B1 EP3345507B1 (de) | 2020-04-29 |
Family
ID=62026929
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18150177.6A Active EP3345508B1 (de) | 2017-01-04 | 2018-01-03 | Stuhl mit einteiliger sitzschale |
| EP18000037.4A Active EP3345507B1 (de) | 2017-01-04 | 2018-01-04 | Mechanik für einen stuhl |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18150177.6A Active EP3345508B1 (de) | 2017-01-04 | 2018-01-03 | Stuhl mit einteiliger sitzschale |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10499742B2 (de) |
| EP (2) | EP3345508B1 (de) |
| DE (1) | DE202017102909U1 (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10881208B2 (en) * | 2016-02-23 | 2021-01-05 | Kokuyo Co., Ltd. | Chair and seat support mechanism |
| DE102020124975A1 (de) | 2020-09-24 | 2022-03-24 | Bock 1 Gmbh & Co. Kg | Mechanik für einen Stuhl |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10702066B2 (en) * | 2018-11-19 | 2020-07-07 | Profim SP. ZO.O | Office chair |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202012012606U1 (de) * | 2011-05-04 | 2013-06-12 | Eckhard Hansen | Sitzmöbel |
| DE102012107778A1 (de) * | 2012-08-23 | 2014-06-26 | Haworth Gmbh | Stuhl, insbesondere Bürostuhl |
| DE202014101592U1 (de) * | 2014-04-04 | 2014-06-30 | Wilkhahn Wilkening + Hahne Gmbh + Co. | Stuhl |
| DE102014103780B3 (de) * | 2014-03-19 | 2015-06-18 | Wilkhahn Wilkening + Hahne Gmbh + Co. | Stuhl |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH666171A5 (de) * | 1984-10-03 | 1988-07-15 | Giroflex Entwicklungs Ag | Stuhl mit rueckwaerts neigbarem sitz- und rueckenlehnentraeger. |
| US5538326A (en) * | 1994-11-14 | 1996-07-23 | Milsco Manufacturing Company | Flexible unitary seat shell |
| MXPA01012487A (es) * | 1999-06-17 | 2002-06-04 | Steelcase Inc | Construccion de silla. |
| DE10106791A1 (de) | 2001-02-12 | 2002-08-14 | Sdm Hansen Gmbh St Margrethen | Sitzmöbel |
| ITMI20022194A1 (it) * | 2002-10-16 | 2004-04-17 | Icf Spa | Sedia avente sedile e schienale mobili. |
| MX2008012255A (es) * | 2006-03-24 | 2008-10-07 | Miller Herman Inc | Pieza de mobiliario. |
| DE102008011309B3 (de) * | 2008-02-27 | 2009-06-04 | Thonet Gmbh | Bürostuhl |
| NO328092B1 (no) * | 2008-03-10 | 2009-12-07 | Efg Europ Furniture Group Ab | Ryggestotteanordning |
| DE202012002288U1 (de) * | 2012-03-08 | 2012-05-11 | Walter Knoll Ag & Co. Kg | Funktionsstuhl |
| EP2910147B1 (de) * | 2012-10-18 | 2018-11-07 | Okamura Corporation | Stuhl |
| DE102014119612A1 (de) * | 2014-12-23 | 2016-06-23 | Recaro Aircraft Seating Gmbh & Co. Kg | Sitzvorrichtung mit längsgeteilter Sitzbodeneinheit |
-
2017
- 2017-05-15 DE DE202017102909.3U patent/DE202017102909U1/de not_active Expired - Lifetime
-
2018
- 2018-01-03 EP EP18150177.6A patent/EP3345508B1/de active Active
- 2018-01-04 EP EP18000037.4A patent/EP3345507B1/de active Active
- 2018-01-04 US US15/861,714 patent/US10499742B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202012012606U1 (de) * | 2011-05-04 | 2013-06-12 | Eckhard Hansen | Sitzmöbel |
| DE102012107778A1 (de) * | 2012-08-23 | 2014-06-26 | Haworth Gmbh | Stuhl, insbesondere Bürostuhl |
| DE102014103780B3 (de) * | 2014-03-19 | 2015-06-18 | Wilkhahn Wilkening + Hahne Gmbh + Co. | Stuhl |
| DE202014101592U1 (de) * | 2014-04-04 | 2014-06-30 | Wilkhahn Wilkening + Hahne Gmbh + Co. | Stuhl |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10881208B2 (en) * | 2016-02-23 | 2021-01-05 | Kokuyo Co., Ltd. | Chair and seat support mechanism |
| DE102020124975A1 (de) | 2020-09-24 | 2022-03-24 | Bock 1 Gmbh & Co. Kg | Mechanik für einen Stuhl |
| EP3973820A1 (de) | 2020-09-24 | 2022-03-30 | BOCK 1 GmbH & Co. KG | Mechanik für einen stuhl |
Also Published As
| Publication number | Publication date |
|---|---|
| DE202017102909U1 (de) | 2018-04-05 |
| EP3345508B1 (de) | 2020-06-17 |
| US10499742B2 (en) | 2019-12-10 |
| EP3345508A1 (de) | 2018-07-11 |
| US20180184809A1 (en) | 2018-07-05 |
| EP3345507B1 (de) | 2020-04-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE19646470B4 (de) | Kraftfahrzeugsitz mit einer Lehne und einem Sitz | |
| EP1060694B1 (de) | Stuhl, insbesondere Bürostuhl | |
| EP1946676A1 (de) | Stuhl | |
| DE102015101546B4 (de) | Synchronmechanik | |
| EP2801293B1 (de) | Sitzmöbelstück und Beschlag hierfür | |
| WO2011141107A1 (de) | Verstellmechanik zur einstellung einer auf eine rückenlehne eines stuhls einwirkende rückstellkraft und bürostuhl mit einer solchen verstellmechanik | |
| AT12867U1 (de) | Sitzmöbel | |
| EP3345507B1 (de) | Mechanik für einen stuhl | |
| EP1652505B1 (de) | Behandlungsstuhl, insbesondere dentalmedizinischer Behandlungsstuhl | |
| EP3120732B1 (de) | Mechanik für einen bürostuhl | |
| WO2006074763A1 (de) | Möbel, insbesondere sitzmöbel | |
| EP3387957A1 (de) | Synchronmechanik für einen bürostuhl | |
| WO2016124317A1 (de) | Synchronmechanik | |
| EP2943094B1 (de) | Sitzmöbelstück | |
| EP3973820A1 (de) | Mechanik für einen stuhl | |
| EP1992255A1 (de) | Sitzmöbel | |
| DE102019113582B4 (de) | Synchronmechanik | |
| EP3437519B1 (de) | Wippmechanik | |
| EP2477523B1 (de) | Wippmechanik für einen bürostuhl | |
| EP2994017B1 (de) | Synchronmechanik | |
| EP3253255B1 (de) | Synchronmechanik | |
| DE102019113581A1 (de) | Synchronmechanik | |
| WO2014177445A1 (de) | Stuhl mit sitzmechanik | |
| EP3528664A1 (de) | Synchronstuhlmechanik und stuhl mit einer solchen | |
| EP3253254B1 (de) | Synchronmechanik |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20181219 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20190301 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20191212 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502018001277 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1262029 Country of ref document: AT Kind code of ref document: T Effective date: 20200515 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20200429 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200730 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200831 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200829 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PK Free format text: BERICHTIGUNGEN |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 |
|
| RIN2 | Information on inventor provided after grant (corrected) |
Inventor name: BOCK, HERMANN Inventor name: BALLENDAT, MARTIN |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502018001277 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20210201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210104 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210131 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210104 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20180104 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20231128 Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1262029 Country of ref document: AT Kind code of ref document: T Effective date: 20230104 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230104 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230104 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240111 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20231205 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200429 |