EP3130809A1 - Optimized efficiency actuating unit of the articulated lever type - Google Patents
Optimized efficiency actuating unit of the articulated lever type Download PDFInfo
- Publication number
- EP3130809A1 EP3130809A1 EP16182930.4A EP16182930A EP3130809A1 EP 3130809 A1 EP3130809 A1 EP 3130809A1 EP 16182930 A EP16182930 A EP 16182930A EP 3130809 A1 EP3130809 A1 EP 3130809A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- equal
- rod
- comprised
- clamping
- length
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000000052 comparative effect Effects 0.000 description 13
- 238000005265 energy consumption Methods 0.000 description 7
- 238000004519 manufacturing process Methods 0.000 description 7
- 238000005457 optimization Methods 0.000 description 5
- 230000021715 photosynthesis, light harvesting Effects 0.000 description 4
- 239000002184 metal Substances 0.000 description 3
- 239000012530 fluid Substances 0.000 description 2
- 238000010297 mechanical methods and process Methods 0.000 description 2
- 230000005226 mechanical processes and functions Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 1
- 238000002788 crimping Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 238000004513 sizing Methods 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images

Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B15/00—Fluid-actuated devices for displacing a member from one position to another; Gearing associated therewith
- F15B15/02—Mechanical layout characterised by the means for converting the movement of the fluid-actuated element into movement of the finally-operated member
- F15B15/06—Mechanical layout characterised by the means for converting the movement of the fluid-actuated element into movement of the finally-operated member for mechanically converting rectilinear movement into non- rectilinear movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B5/00—Clamps
- B25B5/06—Arrangements for positively actuating jaws
- B25B5/12—Arrangements for positively actuating jaws using toggle links
- B25B5/122—Arrangements for positively actuating jaws using toggle links with fluid drive
Definitions
- the present invention relates to an articulated lever actuation unit with optimized efficiency.
- the present invention relates to an actuation unit of the above optimized efficiency type in terms of energy consumption and overall dimensions.
- Articulated lever actuation units such as locking unit and pivot units, are typically used for handling and/or clamping elements during sheet metal processing.
- clamping units for keeping the metal sheets into position during mechanical processes (such as welding, crimping or other technique for joining metal sheets).
- clamping units comprise a closing device able to cause the rotation of a clamping arm, connected to such a closing device, up to an exact operating angular position of closure and, once achieved, keep it in such a position, triggering an irreversibility mechanism able to guarantee the position even in the absence of control (for example, in the absence of air in the case of pneumatic control).
- the stroke of the closing device which generally corresponds to a rotation of 135° of the clamping arm, is usually controlled through a pneumatic or electrical actuation, depending on the specific embodiment.
- the closing device comprises a piston which acts on a toggle mechanism to which the clamping arm is in turn constrained.
- the toggle mechanism consists of a connecting rod and a crank rod, where the connecting rod is pivoted at the ends thereof to the piston rod and to the crank rod, respectively, and the crank rod sets the clamping arm in rotation.
- the connecting rod and the crank rod are typically made of multiple parts or as a single part, for example by means of a fork.
- pneumatic actuation of the piston feeding of pressurized fluid, usually compressed air, is required for generating the thrust force required.
- pressurized fluid usually compressed air
- the generation of compressed air has a very low yield, typically less than 3%.
- pneumatic actuations are generally characterized by high losses which lead to an increase in the consumption of compressed air, in addition to that strictly necessary for control. This source of energy is therefore particularly inefficient and expensive.
- Actuation units designed to optimize air consumption are known in the art. They use complex pneumatic circuits that allow a partial air recovery. In this way, keeping the other features of the actuation unit unchanged, the pneumatic cylinder is able to operate and produce the same thrust force on the piston through a reduced supply of compressed air.
- An example of a clamping unit that uses such a solution is described in patent EP 2016290 .
- the problem underlying the present invention therefore is to devise an articulated lever actuation unit able to operate with a reduced energy supply while offering the same clamping moment, as well as having substantially identical overall dimensions.
- the object of the present invention is to devise an articulated lever actuation unit operable both with a pneumatic actuation and with an electric actuation, achieving a remarkable energy saving.
- the invention therefore relates to an articulated lever actuation unit comprising a body, inside which a control piston is slidably associated to the body along a sliding axis, the control piston being connected or coupled to actuation means able to exert a thrust force P on the control piston, where
- actuation units available on the market are made according to predetermined and by the industrial standards specifically defined "models" in terms of both clamping moment and actuation, which in the specific case of pneumatic actuation translates into "sizes" of the actuation cylinders.
- a known model of clamping unit currently widespread on the market is actuated by means of a ⁇ 50 mm pneumatic cylinder, offering a clamping moment of a value comprised between 180 N m and 230 N m.
- a further widespread model of clamping unit is actuated by means of a ⁇ 63 mm pneumatic cylinder, offering a clamping moment of a value comprised between 375 N m and 425 N m.
- Such pneumatic cylinders when supplied at a pressure of 5 bar, generate a thrust force equal to 981.75 N and 1558.62 N, respectively, consuming a volume of compressed air at each cycle substantially proportional to the respective thrust force.
- the Applicant has therefore identified a need to operate the articulated lever actuation unit through a lower thrust force, while keeping the clamping moment and the overall dimensions substantially unchanged in order to satisfy the industrial standards of the field.
- k is calculated with respect to a position of the pivotable arm other than the closed position and has to be considered invariable with respect to the plurality of physical characteristics which determine the geometry of the actuating unit defined by the industrial standards since, in turn, these physical characteristics are considered to be predefined by the standards.
- Such factor k has furthermore to be considered substantially invariable also with respect to the first rod length BA (also known as connecting rod) which just negligibly contributes to the generation of clamping moment at the output, by substantially working along the horizontal.
- the Applicant has first noted that, in order to keep the clamping moment unchanged while reducing the thrust force P exerted on the piston by the (either pneumatic or electric) actuator to achieve energy saving, the length of the second rod needs to be increased.
- the Applicant has, in fact, found that, near to such condition, such a proportionality factor is strongly influenced by the energy typically dissipated by the system, releasing the thrust force exerted on the articulated lever mechanism on contrast elements.
- the contrast elements for example are the walls of the body against which the articulated lever mechanism rests during the movement caused by the translation of the piston rod, rather than the rods (connecting rod and crank) themselves. These elements are able, by deforming, to absorb part of the thrust force exerted on the same.
- the Applicant has found that, advantageously, the dissipation incurred by the system is considerably lower in proportion for lower thrust forces, thereby allowing a same clamping moment to be obtained with crank lengths well lower than those theoretically calculated. This at the same time allows a considerable energy saving to be obtained while keeping the current overall dimensions unchanged.
- the Applicant has unexpectedly found that the proportionality factor k that binds the clamping moment to the product between thrust force and length of the second lever is comprised between 6.8 and 10.0 for clamping moments comprised between 180 N m and 230 N m, allowing energy saving to be obtained while keeping the length of the second rod AO equal to or less than 32 mm and therefore not changing the current overall dimensions of the corresponding clamping units known to date, able to offer the same clamping moments.
- the Applicant has surprisingly found that the proportionality factor k that binds the clamping moment to the product between thrust force and length of the second lever is comprised between 8.0 and 12.2 for a clamping moment comprised between 375 N m and 425 N m, allowing energy saving to be obtained while keeping the length of the second rod AO equal to or less than 35.5 mm and therefore not changing the current overall dimensions of the corresponding clamping units known to date, able to offer the same clamping moments.
- the Applicant has surprisingly found that the proportionality factor k that binds the clamping moment to the product between thrust force and length of the second lever is comprised between 6.8 and 11.4 for a clamping moment comprised between 830 N m and 880 N m, allowing energy saving to be obtained while keeping the length of the second rod AO equal to or less than 56.5 mm and therefore not changing the current overall dimensions of the corresponding clamping units known to date, able to offer the same clamping moments.
- the Applicant has surprisingly found that the proportionality factor k that binds the clamping moment to the product between thrust force and length of the second lever is comprised between 8.0 and 13.8 for a clamping moment comprised between 115 N m and 145 N m, allowing energy saving to be obtained while keeping the length of the second rod AO equal to or less than 30.5 mm and therefore not changing the current overall dimensions of the corresponding clamping units known to date, able to offer the same clamping moments.
- the Applicant has surprisingly succeeded in obtaining articulated lever actuation units able to provide, for equal overall dimensions, same clamping moments with an optimization of the energy saving of up to about 46%.
- the optimization of the geometry of the articulated lever mechanism of the actuation unit with reference to the thrust force applied allows energy saving to be obtained also in the presence of an electric or combined pneumatic-manual or electric-manual actuation, it being possible to significantly reduce the thrust force required to generate the desired clamping moment without it being necessary to modify the current overall dimensions.
- the present invention may have at least one of the following preferred features; the latter may in particular be combined with each other as desired to meet specific application requirements.
- the length of the second rod ( AO ) is
- the piston stroke is increased proportionally to the increase in the length of the second rod.
- the actuation means are of the pneumatic type, comprising a pneumatic cylinder, the thrust force exerted by the pneumatic cylinder depending on the cylinder section and on the piston stroke.
- the pneumatic cylinder is of the standard size type having section 0 equal to 40 mm and the second rod has a length AO equal to about 32 mm.
- the piston stroke is equal to about 84.8 mm and the pneumatic cylinder is operated at about 5 bar.
- the clamping moment M is comprised between 185 N m and 190 N m, even more preferably substantially equal to 186 N m.
- the pneumatic cylinder is of the standard size type having section 0 equal to 50 mm and the second rod has a length AO equal to about 35 mm.
- the piston stroke is equal to about 91.77 mm and the pneumatic cylinder is operated at about 5 bar.
- the clamping moment M is comprised between 380 N m and 400 N m, even more preferably substantially equal to 390 N m.
- the pneumatic cylinder is of the standard size type having section 0 equal to 63 mm and the second rod has a length AO equal to about 55 mm.
- the piston stroke is equal to about 144.7 mm and the pneumatic cylinder is operated at about 5 bar.
- the clamping moment M is comprised between 845 N m and 855 N m, even more preferably substantially equal to 850 N m.
- the pneumatic cylinder is of the standard size type having section 0 equal to 32 mm and the second rod has a length AO equal to about 29 mm.
- the piston stroke is equal to about 77 mm and the pneumatic cylinder is operated at about 5 bar.
- the clamping moment M is comprised between 125 N m and 135 N m, even more preferably substantially equal to 130 N m.
- the articulated lever actuation unit is a clamping unit.
- the articulated lever actuation unit is a pivot unit.
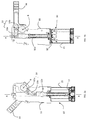
- an articulated lever actuation unit is shown according to the present invention, indicated overall with reference numeral 10, in particular a clamping unit.
- the clamping unit 10 comprises a body 11 within which a control piston 12 is arranged, comprising a rod 12a which can slide within body 11 along a sliding axis A.
- Rod 12a of piston 12 is connected to an articulated lever mechanism 13, specifically comprising a toggle mechanism consisting of a pair of rods 13a, 13b.
- a first rod 13a also called connecting rod, is pivoted at the ends thereof to the piston rod 12a and to the second rod 13b, called crank rod 13b, respectively.
- the crank rod 13b is rotatably connected to body 11 and, at the axis of revolution B thereof, it sets a clamping arm 14 in rotation.
- the control piston 12 is coupled to a pneumatic cylinder 15 able to exert a thrust force P on the control piston when supplied with compressed air.
- Figure 2 schematically shows the articulated lever mechanism 13 in a different configuration compared to the irreversibility condition shown in figure 1b .
- rod AO corresponds to the crank rod 13b
- rod AB corresponds to the connecting rod 13a
- the third rod schematizes rod 12a of piston 12.
- a known clamping unit was considered, characterized by the following parameters:
- a clamping unit was implemented characterized by the following parameters:
- the energy consumption of the clamping unit according to the embodiment of the present example in line with the invention therefore was 213.13 cm 3 , i.e. more than 30% lower than the consumption of the clamping unit of the prior art described in the comparative Example 1.
- such an increase in length is not compatible with the requirement of keeping the overall dimensions of the starting clamping unit unchanged.
- a clamping unit was implemented characterized by the following parameters:
- the energy consumption of the clamping unit according to the embodiment of the present example in line with the invention therefore was 360.39 cm 3 i.e. more than 32% lower than the consumption of the clamping unit of the prior art described in the comparative Example 2.
- crank rod it was sufficient to extend the crank rod by only 3.5 mm, obtaining the same torque equal to 390 N m with a pneumatic actuation carried out with a cylinder having section 0 equal to 50 mm.
- such an increase in length is not compatible with the requirement of keeping the overall dimensions of the starting clamping unit unchanged.
- a clamping unit was implemented characterized by the following parameters:
- the energy consumption of the clamping unit according to the embodiment of the present example in line with the invention therefore was 123.85 cm 3 , i.e. more than 30% lower than the consumption of the clamping unit of the prior art described in the comparative Example 3.
- such an increase in length is not compatible with the requirement of keeping the overall dimensions of the starting clamping unit unchanged.
- a clamping unit was implemented characterized by the following parameters:
- the energy consumption of the clamping unit according to the embodiment of the present example in line with the invention therefore was 902.13 cm 3 , i.e. more than 33% lower than the consumption of the clamping unit of the prior art described in the comparative Example 4.
- the Applicant has also found that, in clamping units according to the industrial standards that provide an output clamping moment comprised between 375 N m and 425 N m, the length of the crank rod, amounting today to 31.5 mm, can be incremented by nevertheless remaining under or equal to 35.5 mm so as to keep the current overall dimensions unchanged.
- the Applicant has also found that, in clamping units according to the industrial standards that provide an output clamping moment comprised between 115 N m and 145 N m, the length of the crank rod, amounting today to 26 mm, can be incremented by nevertheless remaining under or equal to 30.5 mm so as to keep the current overall dimensions unchanged.
- the Applicant has also found that, in clamping units according to the industrial standards that provide an output clamping moment comprised between 830 N m and 880 N m, the length of the crank rod, amounting today to 50 mm, can be incremented by nevertheless remaining under or equal to 56.5 mm so as to keep the current overall dimensions unchanged.
Abstract
Description
- The present invention relates to an articulated lever actuation unit with optimized efficiency. In particular, the present invention relates to an actuation unit of the above optimized efficiency type in terms of energy consumption and overall dimensions.
- Articulated lever actuation units, such as locking unit and pivot units, are typically used for handling and/or clamping elements during sheet metal processing. For example, within the scope of making motor vehicle bodies, it is known to use clamping units for keeping the metal sheets into position during mechanical processes (such as welding, crimping or other technique for joining metal sheets).
- Such mechanical processes require extremely accurate positioning of the elements to be machined and that such a positioning is kept over time. To this end, clamping units comprise a closing device able to cause the rotation of a clamping arm, connected to such a closing device, up to an exact operating angular position of closure and, once achieved, keep it in such a position, triggering an irreversibility mechanism able to guarantee the position even in the absence of control (for example, in the absence of air in the case of pneumatic control).
- The stroke of the closing device, which generally corresponds to a rotation of 135° of the clamping arm, is usually controlled through a pneumatic or electrical actuation, depending on the specific embodiment. In both cases, the closing device comprises a piston which acts on a toggle mechanism to which the clamping arm is in turn constrained. In particular, the toggle mechanism consists of a connecting rod and a crank rod, where the connecting rod is pivoted at the ends thereof to the piston rod and to the crank rod, respectively, and the crank rod sets the clamping arm in rotation. The connecting rod and the crank rod are typically made of multiple parts or as a single part, for example by means of a fork.
- In case of pneumatic actuation of the piston, feeding of pressurized fluid, usually compressed air, is required for generating the thrust force required. The generation of compressed air has a very low yield, typically less than 3%. Moreover, pneumatic actuations are generally characterized by high losses which lead to an increase in the consumption of compressed air, in addition to that strictly necessary for control. This source of energy is therefore particularly inefficient and expensive.
- Considering that normally, 3500 to 4000 clamping units plus about 60-80 pneumatic control pivot units are used in production lines of motor vehicle bodies, it goes without saying that in the field of articulated lever actuation units for use in such production lines there is a high interest in an optimization of the efficiency in terms of energy consumption, for example to reduce the amount of compressed air required for the actuation. Clearly, the optimization of energy consumption must be subject to the conditions dictated by the already existing production lines which require other operating parameters, such as the overall dimensions of the actuation units and the output clamping moment provided by the same, to be kept unchanged. Furthermore, these physical characteristics are determined by industrial standards and cannot be varied.
- Actuation units designed to optimize air consumption are known in the art. They use complex pneumatic circuits that allow a partial air recovery. In this way, keeping the other features of the actuation unit unchanged, the pneumatic cylinder is able to operate and produce the same thrust force on the piston through a reduced supply of compressed air. An example of a clamping unit that uses such a solution is described in patent
EP 2016290 . - The solutions that use additional pneumatic circuits, in addition to having an increased structural complexity and a consequent increase of construction costs, offer an advantage in terms of energy saving solely with respect to a pneumatic actuation, as they are not applicable in combination with an electric actuation.
- In the light of the above, the problem underlying the present invention therefore is to devise an articulated lever actuation unit able to operate with a reduced energy supply while offering the same clamping moment, as well as having substantially identical overall dimensions.
- In particular, the object of the present invention is to devise an articulated lever actuation unit operable both with a pneumatic actuation and with an electric actuation, achieving a remarkable energy saving.
- According to a first aspect thereof, the invention therefore relates to an articulated lever actuation unit comprising a body, inside which a control piston is slidably associated to the body along a sliding axis, the control piston being connected or coupled to actuation means able to exert a thrust force P on the control piston, where
- the control piston is operatively coupled to a pivotable arm with the interposition of an articulated lever mechanism in order to induce a rotational movement to the pivotable arm about an axis of rotation perpendicular to the sliding axis following a sliding motion of the control piston, the pivotable arm being moved between an open or non-operating position and a closed or operating position,
- the articulated lever mechanism comprises a first and a second rod, the first rod being pivoted to a rod of the control piston and to the second rod, respectively, and the second rod being pivoted to the body and setting the pivotable arm in rotation,
- for each position of the pivotable arm other than the closed position, the thrust force P exerted by the control piston determines a clamping moment M at the axis of rotation which is variable according to law M = k * P *
AO , whereAO is the length of the second rod and k is a proportionality factor, characterized in that- the length of the second rod
AO is less than or equal to 32.8 mm and the proportionality factor k is comprised between 6.8 and 10.0 for a clamping moment comprised between 180 N m and 230 N m; or - the length of the second rod
AO is less than or equal to 35.5 mm and the proportionality factor is comprised between 8.0 and 12.2 for a clamping moment comprised between 375 N m and 425 N m; or - the length of the second rod
AO is less than or equal to 30.5 mm and the proportionality factor is comprised between 8.0 and 13.8 for a clamping moment comprised between 115 N m and 145 N m; or - the length of the second rod
AO is less than or equal to 56.5 mm and the proportionality factor is comprised between 6.8 and 11.4 for a clamping moment comprised between 830 N m and 880 N m.
- the length of the second rod
- The Applicant started from the observation that, to date, the actuation units available on the market are made according to predetermined and by the industrial standards specifically defined "models" in terms of both clamping moment and actuation, which in the specific case of pneumatic actuation translates into "sizes" of the actuation cylinders. For example, a known model of clamping unit currently widespread on the market is actuated by means of a Ø 50 mm pneumatic cylinder, offering a clamping moment of a value comprised between 180 N m and 230 N m. Likewise, a further widespread model of clamping unit is actuated by means of a Ø 63 mm pneumatic cylinder, offering a clamping moment of a value comprised between 375 N m and 425 N m. Such pneumatic cylinders, when supplied at a pressure of 5 bar, generate a thrust force equal to 981.75 N and 1558.62 N, respectively, consuming a volume of compressed air at each cycle substantially proportional to the respective thrust force.
- Analogously, another known model of clamping unit currently widespread on the market is actuated by means of a Ø 40 mm pneumatic cylinder, offering a clamping moment of a value comprised between 115 N m and 145 N m. Not least, a still further widespread model of clamping unit is actuated by means of a Ø 80 mm pneumatic cylinder, offering a clamping moment of a value comprised between 830 N m and 880 N m. Such pneumatic cylinders, when supplied at a pressure of 5 bar, generate a thrust force equal to 628,32 N and 2513,27 N, respectively, consuming a volume of compressed air at each cycle substantially proportional to the respective thrust force.
- In the present description and in the following claims, where reference is made to a pneumatic cylinder with "standardized size" it is meant a cylinder having features according to what defined in the international standard ISO 15552 - Pneumatic fluid power - Cylinders with detachable mountings as regards each specific size.
- In order to obtain energy saving, the Applicant has therefore identified a need to operate the articulated lever actuation unit through a lower thrust force, while keeping the clamping moment and the overall dimensions substantially unchanged in order to satisfy the industrial standards of the field.
- In the field of the articulated lever actuating units, such as clamping and pivot units for use in the automotive sector, there are indeed industrial standards which define the physical characteristics of such units based on the cylinder sizes. In detail, such industrial standards define the dimensions of the units in terms of volumes and position of the unit axis (which coincides with the axis along which the rod translates inside the unit) with respect to the rotating axis given at the output of the unit.
- In theoretical terms, torque M is defined by a relationship of direct proportionality with both the thrust force P and with the length of the second rod
AO (also known as crank) according to the following variability law (with respect to a configuration of the articulated lever system other than the closed position in which the system has reached the condition of irreversibility):
BA (also known as connecting rod) which just negligibly contributes to the generation of clamping moment at the output, by substantially working along the horizontal. - Starting from this theoretical law, the Applicant has first noted that, in order to keep the clamping moment unchanged while reducing the thrust force P exerted on the piston by the (either pneumatic or electric) actuator to achieve energy saving, the length of the second rod needs to be increased.
- Applying this theoretical law, the Applicant has noted that in order to reduce the size of the pneumatic cylinders currently used in the known articulated lever actuation units to obtain a significant reduction of the thrust force exerted on the piston and a consequent energy saving, it is necessary to increase the crank length not compatible with the need of keeping the current overall dimensions substantially unchanged.
- Still according to the theoretical law of variability, the Applicant has also noted that reductions in the volume of the cylinder such as to result in an increase of the crank length compatible with keeping the overall dimensions unchanged would lead to a negligible energy saving, in particular well below 10%.
- The Applicant has surprisingly found that, contrary to what the theoretical laws lead to conclude, the relation between torque, thrust force and length of the second rod is not bound by a constant proportionality factor but conversely, such a proportionality factor varies as a function of the thrust force exerted. Such different relation between torque, thrust force and length of the second rod particularly applies when the articulated lever system is approaching or has substantially reached its irreversibility condition.
- The Applicant has, in fact, found that, near to such condition, such a proportionality factor is strongly influenced by the energy typically dissipated by the system, releasing the thrust force exerted on the articulated lever mechanism on contrast elements. The contrast elements for example are the walls of the body against which the articulated lever mechanism rests during the movement caused by the translation of the piston rod, rather than the rods (connecting rod and crank) themselves. These elements are able, by deforming, to absorb part of the thrust force exerted on the same.
- The Applicant has found that, advantageously, the dissipation incurred by the system is considerably lower in proportion for lower thrust forces, thereby allowing a same clamping moment to be obtained with crank lengths well lower than those theoretically calculated. This at the same time allows a considerable energy saving to be obtained while keeping the current overall dimensions unchanged.
- Specifically, the Applicant has unexpectedly found that the proportionality factor k that binds the clamping moment to the product between thrust force and length of the second lever is comprised between 6.8 and 10.0 for clamping moments comprised between 180 N m and 230 N m, allowing energy saving to be obtained while keeping the length of the second rod
AO equal to or less than 32 mm and therefore not changing the current overall dimensions of the corresponding clamping units known to date, able to offer the same clamping moments. - Likewise, the Applicant has surprisingly found that the proportionality factor k that binds the clamping moment to the product between thrust force and length of the second lever is comprised between 8.0 and 12.2 for a clamping moment comprised between 375 N m and 425 N m, allowing energy saving to be obtained while keeping the length of the second rod
AO equal to or less than 35.5 mm and therefore not changing the current overall dimensions of the corresponding clamping units known to date, able to offer the same clamping moments. - Similarly, the Applicant has surprisingly found that the proportionality factor k that binds the clamping moment to the product between thrust force and length of the second lever is comprised between 6.8 and 11.4 for a clamping moment comprised between 830 N m and 880 N m, allowing energy saving to be obtained while keeping the length of the second rod
AO equal to or less than 56.5 mm and therefore not changing the current overall dimensions of the corresponding clamping units known to date, able to offer the same clamping moments. - Again, the Applicant has surprisingly found that the proportionality factor k that binds the clamping moment to the product between thrust force and length of the second lever is comprised between 8.0 and 13.8 for a clamping moment comprised between 115 N m and 145 N m, allowing energy saving to be obtained while keeping the length of the second rod
AO equal to or less than 30.5 mm and therefore not changing the current overall dimensions of the corresponding clamping units known to date, able to offer the same clamping moments. - By selecting the crank length and the thrust force according to the above parameters, the Applicant has surprisingly succeeded in obtaining articulated lever actuation units able to provide, for equal overall dimensions, same clamping moments with an optimization of the energy saving of up to about 46%.
- Moreover, the optimization of the geometry of the articulated lever mechanism of the actuation unit with reference to the thrust force applied, in accordance with the parameters defined above, allows energy saving to be obtained also in the presence of an electric or combined pneumatic-manual or electric-manual actuation, it being possible to significantly reduce the thrust force required to generate the desired clamping moment without it being necessary to modify the current overall dimensions.
- Last but not least, in case of pneumatic actuation, the possibility of using cylinders of a smaller size also positively affects the sizing of the valves and of the fittings of the pneumatic circuit, allowing an additional cost saving to be obtained.
- The present invention may have at least one of the following preferred features; the latter may in particular be combined with each other as desired to meet specific application requirements.
- Preferably, the length of the second rod (
AO ) is - greater than 28 mm for clamping moments comprised between 180 N m and 230 N m; or
- greater than 31.5 mm for clamping moments comprised between 375 N m and 425 N m; or
- greater than 26 mm for clamping moments comprised between 115 N m and 145 N m; or
- greater than 50 mm for clamping moments comprised between 830 N m and 880 N m.
- Preferably, the piston stroke is increased proportionally to the increase in the length of the second rod.
- More preferably, the piston stroke is increased according to the following proportionality law Δstroke = Δ
AO * (1 + sin 45°). - Preferably, the actuation means are of the pneumatic type, comprising a pneumatic cylinder, the thrust force exerted by the pneumatic cylinder depending on the cylinder section and on the piston stroke.
- More preferably, for clamping moments comprised between 180 N m and 230 N m, the pneumatic cylinder is of the standard size type having section 0 equal to 40 mm and the second rod has a length
AO equal to about 32 mm. - Even more preferably, the piston stroke is equal to about 84.8 mm and the pneumatic cylinder is operated at about 5 bar.
- More preferably, the clamping moment M is comprised between 185 N m and 190 N m, even more preferably substantially equal to 186 N m.
- Alternatively, for a clamping moment comprised between 375 N m and 425 N m, the pneumatic cylinder is of the standard size type having section 0 equal to 50 mm and the second rod has a length
AO equal to about 35 mm. - Even more preferably, the piston stroke is equal to about 91.77 mm and the pneumatic cylinder is operated at about 5 bar.
- More preferably, the clamping moment M is comprised between 380 N m and 400 N m, even more preferably substantially equal to 390 N m.
- Alternatively, for a clamping moment comprised between 830 N m and 880 N m, the pneumatic cylinder is of the standard size type having section 0 equal to 63 mm and the second rod has a length
AO equal to about 55 mm. - More preferably, the piston stroke is equal to about 144.7 mm and the pneumatic cylinder is operated at about 5 bar.
- More preferably, the clamping moment M is comprised between 845 N m and 855 N m, even more preferably substantially equal to 850 N m.
- Alternatively, for a clamping moment comprised between 115 N m and 145 N m, the pneumatic cylinder is of the standard size type having section 0 equal to 32 mm and the second rod has a length
AO equal to about 29 mm. - More preferably, the piston stroke is equal to about 77 mm and the pneumatic cylinder is operated at about 5 bar.
- More preferably, the clamping moment M is comprised between 125 N m and 135 N m, even more preferably substantially equal to 130 N m.
- Preferably, the articulated lever actuation unit is a clamping unit.
- Alternatively, the articulated lever actuation unit is a pivot unit.
- Further features and advantages of the present invention will appear more clearly from the following detailed description of some preferred embodiments thereof, made with reference to the accompanying drawings.
- The different features in the single configurations may be combined with one another as desired according to the description above, to make use of the advantages resulting in a specific way from a particular combination.
- In such drawings,
-
figures 1a and 1b are schematic side sectional views of a clamping unit according to the prior art, in the non-operating open position and in the operating closed position, respectively. -
figure 2 is a schematic representation of an articulated lever mechanism included in an actuation unit according to the present invention in a configuration other than the irreversibility condition. - With reference to
figures 1a and 1b , an articulated lever actuation unit is shown according to the present invention, indicated overall withreference numeral 10, in particular a clamping unit. - The clamping
unit 10 comprises abody 11 within which acontrol piston 12 is arranged, comprising arod 12a which can slide withinbody 11 along a sliding axis A. -
Rod 12a ofpiston 12 is connected to an articulatedlever mechanism 13, specifically comprising a toggle mechanism consisting of a pair ofrods first rod 13a, also called connecting rod, is pivoted at the ends thereof to thepiston rod 12a and to thesecond rod 13b, called crankrod 13b, respectively. Thecrank rod 13b is rotatably connected tobody 11 and, at the axis of revolution B thereof, it sets a clampingarm 14 in rotation. - The
control piston 12 is coupled to apneumatic cylinder 15 able to exert a thrust force P on the control piston when supplied with compressed air. -
Figure 2 schematically shows the articulatedlever mechanism 13 in a different configuration compared to the irreversibility condition shown infigure 1b . In particular, rod AO corresponds to the crankrod 13b, rod AB corresponds to the connectingrod 13a and the third rod schematizesrod 12a ofpiston 12. - In such a configuration, the clamping moment M measurable at the output (i.e. at the axis of rotation B coincident at point O in
figure 2 ) is obtainable through the equilibrium equations of the kinematics shown infigure 2 , leading to the following equation:
- It is therefore possible to deduce a substantial proportionality between torque M and the product of the thrust force P with the length of the crank rod
AO according to the following variability law:
- The following is a comparative example to illustrate the present invention. The scope of protection defined by the appended claims, however, is not to be considered limited only to the specific example.
- A known clamping unit was considered, characterized by the following parameters:
- length of the crank arm equal to 28 mm;
- piston stroke equal to 78 mm;
- size of the pneumatic cylinder equal to 0 50 mm operated at 5 bar; and
- output clamping moment equal to 186 N m.
- It was measured that such a clamping unit requires an air consumption equal to about 306.31 cm3 for each cycle defined as a forward and backward stroke of the cylinder.
- In particular, the cylinder having section 0 equal to 50 mm, when operated with compressed air at 5 bar, generates a thrust force P equal to about 981.75 N. From the proportionality relation discussed above it is therefore inferred that the proportionality constant of such a clamping unit is about k = 6.77.
- Theoretically, this means that, in order to scale the size of the cylinder, using one having section 0 equal to 40 mm, therefore able to develop a thrust force at 5 bar equal to about P = 628.32 N, it would be necessary to bring the length of the crank rod to about AO = 44 mm. However, such an increase in length is not compatible with the requirement of keeping the overall dimensions of the starting clamping unit unchanged.
- EXAMPLE 1:
- According to the present invention, a clamping unit was implemented characterized by the following parameters:
- length of the crank arm equal to 32 mm;
- piston stroke equal to 84.8 mm;
- size of the pneumatic cylinder equal to 0 40 mm operated at 5 bar,
- In particular, the increase in the piston stroke was selected based on the fact that it is proportional to the increase in the length of the crank rod according to the following law Δcorsa = Δ
AO * (1 + sin 45°), applicable in the operating range of the device suitable for ensuring an opening angle equal to 135° (opening angle characteristic of the applications on production lines of motor vehicle bodies). - The energy consumption of the clamping unit according to the embodiment of the present example in line with the invention therefore was 213.13 cm3, i.e. more than 30% lower than the consumption of the clamping unit of the prior art described in the comparative Example 1.
- In practice, it was sufficient to extend the crank rod by only 4 mm, obtaining the same torque equal to 186 N m with a pneumatic actuation carried out with a cylinder having section 0 equal to 40 mm.
- Such a configuration led to a reduced energy dissipation and therefore to an increase in the proportionality constant. Specifically, in the configuration described, the proportionality constant surprisingly reached a value of about k = 9.25.
- With a known clamping unit, characterized by the following parameters:
- length of the crank arm equal to 31.5 mm;
- piston stroke equal to 85.8 mm;
- size of the pneumatic cylinder equal to 0 63 mm operated at 5 bar; and
- output clamping moment equal to 390 N m.
- It was measured that such a clamping unit requires an air consumption equal to about 534.92 cm3 for each cycle defined as a forward and backward stroke of the cylinder.
- In particular, the cylinder having section 0 equal to 63 mm, when operated with compressed air at 5 bar, generates a thrust force P equal to about 1558.62 N. From the proportionality relation discussed above it is therefore inferred that the proportionality constant of such a clamping unit is about k = 7.94.
- Theoretically, this for example means that, in order to scale the size of the cylinder, using one having section 0 equal to 50 mm, therefore able to develop a thrust force at 5 bar equal to about P = 981.75 N, it would be necessary to bring the length of the crank rod to about AO = 50 mm. However, such an increase in length is not compatible with the requirement of keeping the overall dimensions of the starting clamping unit unchanged.
- According to the present invention, a clamping unit was implemented characterized by the following parameters:
- length of the crank arm equal to 35 mm;
- piston stroke equal to 91.77 mm;
- size of the pneumatic cylinder equal to 0 50 mm operated at 5 bar,
- In particular, the increase in the piston stroke was selected based on the fact that it is proportional to the increase in the length of the crank rod according to the following law Δcorsa = Δ
AO * (1 + sin 45°), applicable in the operating range of the device suitable for ensuring an opening angle equal to 135° (opening angle characteristic of the applications on production lines of motor vehicle bodies). - The energy consumption of the clamping unit according to the embodiment of the present example in line with the invention therefore was 360.39 cm3 i.e. more than 32% lower than the consumption of the clamping unit of the prior art described in the comparative Example 2.
- In practice, it was sufficient to extend the crank rod by only 3.5 mm, obtaining the same torque equal to 390 N m with a pneumatic actuation carried out with a cylinder having section 0 equal to 50 mm.
- Such a configuration led to a reduced energy dissipation and therefore to an increase in the proportionality constant. Specifically, in the configuration described, the proportionality constant surprisingly reached a value of about k = 11.28.
- With a known clamping unit, characterized by the following parameters:
- length of the crank arm equal to 26 mm;
- piston stroke equal to 71.22 mm;
- size of the pneumatic cylinder equal to 0 40 mm operated at 5 bar; and
- output clamping moment equal to 130 N m.
- It was measured that such a clamping unit requires an air consumption equal to about 178.99 cm3 for each cycle defined as a forward and backward stroke of the cylinder.
- In particular, the cylinder having section 0 equal to 40 mm, when operated with compressed air at 5 bar, generates a thrust force P equal to about 628.32 N. From the proportionality relation discussed above it is therefore inferred that the proportionality constant of such a clamping unit is about k = 7.95.
- Theoretically, this for example means that, in order to scale the size of the cylinder, using one having section 0 equal to 32 mm, therefore able to develop a thrust force at 5 bar equal to about P = 402.12 N, it would be necessary to bring the length of the crank rod to about AO = 40 mm. However, such an increase in length is not compatible with the requirement of keeping the overall dimensions of the starting clamping unit unchanged.
- According to the present invention, a clamping unit was implemented characterized by the following parameters:
- length of the crank arm equal to 29 mm;
- piston stroke equal to 77 mm;
- size of the pneumatic cylinder equal to 0 32 mm operated at 5 bar,
- In particular, the increase in the piston stroke was selected based on the fact that it is proportional to the increase in the length of the crank rod according to the following law Δcorsa = Δ
AO * (1 + sin 45°), applicable in the operating range of the device suitable for ensuring an opening angle equal to 135° (opening angle characteristic of the applications on production lines of motor vehicle bodies). - The energy consumption of the clamping unit according to the embodiment of the present example in line with the invention therefore was 123.85 cm3, i.e. more than 30% lower than the consumption of the clamping unit of the prior art described in the comparative Example 3.
- In practice, it was sufficient to extend the crank rod by only 3 mm, obtaining the same torque equal to 130 N m with a pneumatic actuation carried out with a cylinder having section 0 equal to 32 mm.
- Such a configuration led to a reduced energy dissipation and therefore to an increase in the proportionality constant. Specifically, in the configuration described, the proportionality constant surprisingly reached a value of about k = 11.15.
- With a known clamping unit, characterized by the following parameters:
- length of the crank arm equal to 50 mm;
- piston stroke equal to 135.2 mm;
- size of the pneumatic cylinder equal to 0 80 mm operated at 5 bar; and
- output clamping moment equal to 850 N m.
- It was measured that such a clamping unit requires an air consumption equal to about 1359.17 cm3 for each cycle defined as a forward and backward stroke of the cylinder.
- In particular, the cylinder having section 0 equal to 80 mm, when operated with compressed air at 5 bar, generates a thrust force P equal to about 2513.27 N. From the proportionality relation discussed above it is therefore inferred that the proportionality constant of such a clamping unit is about k = 6.76.
- Theoretically, this for example means that, in order to scale the size of the cylinder, using one having section 0 equal to 63 mm, therefore able to develop a thrust force at 5 bar equal to about P = 1558.62 N, it would be necessary to bring the length of the crank rod to about AO = 80 mm. However, such an increase in length is not compatible with the requirement of keeping the overall dimensions of the starting clamping unit unchanged.
- According to the present invention, a clamping unit was implemented characterized by the following parameters:
- length of the crank arm equal to 55 mm;
- piston stroke equal to 144.7 mm;
- size of the pneumatic cylinder equal to 0 63 mm operated at 5 bar,
- In particular, the increase in the piston stroke was selected based on the fact that it is proportional to the increase in the length of the crank rod according to the following law Δcorsa = Δ
AO * (1 + sin 45°), applicable in the operating range of the device suitable for ensuring an opening angle equal to 135° (opening angle characteristic of the applications on production lines of motor vehicle bodies). - The energy consumption of the clamping unit according to the embodiment of the present example in line with the invention therefore was 902.13 cm3, i.e. more than 33% lower than the consumption of the clamping unit of the prior art described in the comparative Example 4.
- In practice, it was sufficient to extend the crank rod by only 5 mm, obtaining the same torque equal to 850 N m with a pneumatic actuation carried out with a cylinder having section 0 equal to 63 mm.
- Such a configuration led to a reduced energy dissipation and therefore to an increase in the proportionality constant. Specifically, in the configuration described, the proportionality constant surprisingly reached a value of about k = 9.92.
- The choice of so-called standard cylinder sizes in the presentation of the invention is not to be considered binding for the definition of the invention, as it is solely based on a simpler repeatability of such pneumatic cylinders. On the contrary, the invention carries out its advantageous effects with any type of actuation, also not necessarily pneumatic.
- The Applicant has in fact found that, in clamping units according to the industrial standards that provide an output clamping moment comprised between 180 N m and 230 N m, the length of the crank rod, amounting today to 28 mm, can be incremented by nevertheless remaining under or equal to 32.8 mm so as to keep unchanged the current overall dimensions deriving from the standards.
- Likewise, the Applicant has also found that, in clamping units according to the industrial standards that provide an output clamping moment comprised between 375 N m and 425 N m, the length of the crank rod, amounting today to 31.5 mm, can be incremented by nevertheless remaining under or equal to 35.5 mm so as to keep the current overall dimensions unchanged.
- Similarly, the Applicant has also found that, in clamping units according to the industrial standards that provide an output clamping moment comprised between 115 N m and 145 N m, the length of the crank rod, amounting today to 26 mm, can be incremented by nevertheless remaining under or equal to 30.5 mm so as to keep the current overall dimensions unchanged.
- Not least, the Applicant has also found that, in clamping units according to the industrial standards that provide an output clamping moment comprised between 830 N m and 880 N m, the length of the crank rod, amounting today to 50 mm, can be incremented by nevertheless remaining under or equal to 56.5 mm so as to keep the current overall dimensions unchanged.
- The configuration of maximum optimization of the energy saving is carried at said crank lengths identified by the Applicant as the maximum allowable.
- Accordingly, in case of clamping units with a clamping moment comprised between 180 N m and 230 N m, it is possible to bring the energy saving up to 36.2%, while in case of clamping units with a clamping moment comprised between 375 N m and 425 N m, it is possible to bring the energy saving of up to 37.3%.
- Furthermore, in case of clamping units with a clamping moment comprised between 115 N m and 145 N m, it is possible to bring the energy saving up to 45.7%, while in case of clamping units with a clamping moment comprised between 830 N m and 880 N m, it is possible to bring the energy saving of up to 43.3%.
- The features of the articulated lever actuation unit object of the present invention as well as the relevant advantages are clear from the above description.
- Additional variations of the embodiments described above are possible without departing from the teaching of the invention.
- Finally, it is clear that several changes and variations may be made to the articulated lever actuation unit thus conceived, all falling within the invention; moreover, all details can be replaced with technically equivalent elements. In the practice, the materials used as well as the sizes, can be whatever, according to the technical requirements.
Claims (15)
- An articulated lever actuation unit (10) comprising a body (11), inside which a control piston (12) is slidably associated to the body (11) along a sliding axis (A), the control piston (12) being connected or coupled to actuation means (15) able to exert a thrust force (P) on the control piston (12), where- the control piston (12) is operatively coupled to a pivotable arm (14) with the interposition of an articulated lever mechanism (13) in order to induce a rotational movement to the pivotable arm (14) about an axis of rotation (B) perpendicular to the sliding axis (A) following a sliding motion of the control piston (12), the pivotable arm (14) being moved between an open or non-operating position and a closed or operating position,- the articulated lever mechanism (13) comprises a first (13a) and a second (13b) rod, the first rod (13a) being pivoted to a rod (12a) of the control piston (12) and to the second rod (13b), respectively, and the second rod (13b) being pivoted to the body (11) and setting the pivotable arm (14) in rotation,- for each position of the pivotable arm other than the closed position, the thrust force (P) exerted by the control piston (12) determines a clamping moment (M) at the axis of rotation (B) which is variable according to law M = k * P *
AO , whereAO is the length of the second rod and k is a proportionality factor,
characterized in that- the length of the second rod (AO ) is less than or equal to 32.8 mm and the proportionality factor (k) is comprised between 6.8 and 10.0 for a clamping moment of between 180 N m and 230 N m; or- the length of the second rod (AO ) is less than or equal to 35.5 mm and the proportionality factor is comprised between 8.0 and 12.2 for a clamping moment of between 375 N m and 425 N m; or- the length of the second rod (AO ) is less than or equal to 30.5 mm and the proportionality factor (k) is comprised between 8.0 and 13.8 for a clamping moment of between 115 N m and 145 N m; or- the length of the second rod (AO ) is less than or equal to 56.5 mm and the proportionality factor is comprised between 6.8 and 11.4 for a clamping moment of between 830 N m and 880 N m. - Actuation unit (10) according to claim 1, wherein the length of the second rod (
AO ) is- greater than 28 mm for clamping moments comprised between 180 N m and 230 N m; or- greater than 31.5 mm for clamping moments comprised between 375 N m and 425 N m; or- greater than 26 mm for clamping moments comprised between 115 N m and 145 N m; or- greater than 50 mm for clamping moments comprised between 830 N m and 880 N m. - Actuation unit (10) according to claim 1 or 2, wherein the stroke of the control piston (12) is increased proportionally to the increase in the length of the second rod (
AO ). - Actuation unit (10) according to claim 3, wherein the stroke of the control piston (12) is increased according to the following proportionality law

- Actuation unit (10) according to any one of the preceding claims, wherein the actuation means are of the pneumatic type, comprising a pneumatic cylinder (15).
- Actuation unit (10) according to claim 5, wherein for clamping moments (M) comprised between 180 N m and 230 N m, the pneumatic cylinder is of the standard size type having section 0 equal to 40 mm operated at about 5 bar, the second rod has a length (
AO ) equal to about 32 mm and the piston stroke is equal to about 84.8 mm. - Actuation unit (10) according to claim 6, wherein the clamping moment (M) is comprised between 185 N m and 190 N m, preferably substantially equal to 186 N m.
- Actuation unit (10) according to claim 5, wherein for clamping moments (M) comprised between 375 N m and 425 N m, the pneumatic cylinder is of the standard size type having section 0 equal to 50 mm operated at about 5 bar, the second rod has a length (
AO ) equal to about 35 mm and the piston stroke is equal to about 91.77 mm. - Actuation unit (10) according to claim 8, wherein the clamping moment (M) is comprised between 380 N m and 400 N m, preferably substantially equal to 390 N m.
- Actuation unit (10) according to claim 5, wherein for clamping moments (M) comprised between 830 N m and 880 N m, the pneumatic cylinder is of the standard size type having section 0 equal to 63 mm operated at about 5 bar, the second rod has a length (
AO ) equal to about 55 mm and the piston stroke is equal to about 144.7 mm. - Actuation unit (10) according to claim 10, wherein the clamping moment (M) is comprised between 845 N m and 855 N m, preferably substantially equal to 850 N m.
- Actuation unit (10) according to claim 5, wherein for clamping moments (M) comprised between 115 N m and 145 N m, the pneumatic cylinder is of the standard size type having section 0 equal to 32 mm operated at about 5 bar, the second rod has a length (
AO ) equal to about 29 mm and the piston stroke is equal to about 77 mm. - Actuation unit (10) according to claim 12, wherein the clamping moment (M) is comprised between 125 N m and 132 N m, preferably substantially equal to 130 N m.
- Actuation unit (10) according to any of the preceding claims, wherein the actuation unit (10) is a clamping unit.
- Actuation unit (10) according to any of claims 1 to 5, wherein the actuation unit (10) is a pivot unit.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITUB2015A003120A ITUB20153120A1 (en) | 2015-08-13 | 2015-08-13 | ACTUATION TYPE ACTUATED UNIT WITH OPTIMIZED EFFICIENCY |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3130809A1 true EP3130809A1 (en) | 2017-02-15 |
| EP3130809B1 EP3130809B1 (en) | 2023-08-02 |
Family
ID=54477183
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP16182930.4A Active EP3130809B1 (en) | 2015-08-13 | 2016-08-05 | Optimized efficiency actuating unit of the articulated lever type |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3130809B1 (en) |
| IT (1) | ITUB20153120A1 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108857966A (en) * | 2017-05-15 | 2018-11-23 | 奥拉夫和安德烈德珂斯协会 | For using the curved lever clamping device in the body structure of automotive industry |
| IT202000003805A1 (en) * | 2020-02-24 | 2021-08-24 | Pneumax S P A | ACTUATION UNIT OF THE TYPE WITH ARTICULATED LEVER OR ELECTRICALLY OPERATED CAM |
| IT202000003784A1 (en) * | 2020-02-24 | 2021-08-24 | Pneumax S P A | ACTUATION UNIT OF THE TYPE WITH ARTICULATED LEVER OR ELECTRICALLY OPERATED CAM |
Citations (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0341155A1 (en) | 1988-05-06 | 1989-11-08 | Genus International | Device for clamping plates or sectional steels against each other |
| DE29811331U1 (en) | 1997-10-08 | 1998-10-08 | Genus Technologies | Device for holding, positioning and tensioning |
| EP0894573A2 (en) * | 1997-07-29 | 1999-02-03 | Benteler Ag | Workpiece clamp |
| EP0993932A2 (en) | 1998-10-12 | 2000-04-19 | STRIP's d.o.o. Podjetje za svetovanje trzenje in proizvodnjo | Press with toggle drive |
| EP1088623A2 (en) | 1999-10-01 | 2001-04-04 | SMC Kabushiki Kaisha | Electric clamp apparatus |
| EP1149665A2 (en) | 2000-04-28 | 2001-10-31 | SMC Kabushiki Kaisha | Electric clamp apparatus |
| EP1179394A2 (en) | 2000-08-03 | 2002-02-13 | Norgren Automotive Inc. | Over-center power clamp toggle mechanism |
| US6416045B1 (en) | 2000-07-25 | 2002-07-09 | Norgren Automotive, Inc. | Rotary clamp having predetermined adjustable clamping angles |
| DE10136057C1 (en) | 2001-07-25 | 2002-10-02 | Tuenkers Maschinenbau Gmbh | Knee-lever clamping, especially for use in body structure of motor vehicles, has clamping head and a drive which is axially connected to it |
| EP1262285A2 (en) | 2001-04-30 | 2002-12-04 | Btm Corporation | Adjustable stroke clamp |
| EP1310332A2 (en) * | 2001-11-05 | 2003-05-14 | Luciano Migliori | Electrically operated clamping device |
| DE102004007346B3 (en) | 2003-11-04 | 2005-04-21 | Tünkers Maschinenbau Gmbh | Road vehicle bodywork manufacturing tool with knee joint clamping system and point welding tool has cylinder with working piston and braking piston with piston rod fitting in bore in working piston rod |
| EP1849559A1 (en) | 2006-04-27 | 2007-10-31 | UNIVER S.p.A. | Positioning and/or clamping apparatus, with adjustable opening position of the working arm |
| EP2016290A1 (en) | 2006-05-10 | 2009-01-21 | TÜNKERS MASCHINENBAU GmbH | Procedure for the loading of a working cylinder, control module for it, working cylinder and utilization of the same |
| EP1878539B1 (en) | 2006-06-26 | 2009-04-15 | UNIVER S.p.A. | Clamping and/or centering device for work pieces, with manually settable operative positions |
| EP2055430B1 (en) | 2007-10-29 | 2009-06-10 | UNIVER S.p.A. | Toggle joint clamping device |
| EP2177320A1 (en) * | 2008-10-15 | 2010-04-21 | UNIVER S.p.A. | Irreversible-type toggle-lever drive device |
| DE202015004786U1 (en) | 2014-10-06 | 2015-08-14 | Olaf Und André Tünkers Gbr (Vertretungsberechtigter Gesellschafter: Dipl.-Ing. Olaf Tünkers, 40885 Ratingen) | Toggle clamping device, in particular for use in the bodywork of the automotive industry |
-
2015
- 2015-08-13 IT ITUB2015A003120A patent/ITUB20153120A1/en unknown
-
2016
- 2016-08-05 EP EP16182930.4A patent/EP3130809B1/en active Active
Patent Citations (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0341155A1 (en) | 1988-05-06 | 1989-11-08 | Genus International | Device for clamping plates or sectional steels against each other |
| EP0894573A2 (en) * | 1997-07-29 | 1999-02-03 | Benteler Ag | Workpiece clamp |
| DE29811331U1 (en) | 1997-10-08 | 1998-10-08 | Genus Technologies | Device for holding, positioning and tensioning |
| EP0993932A2 (en) | 1998-10-12 | 2000-04-19 | STRIP's d.o.o. Podjetje za svetovanje trzenje in proizvodnjo | Press with toggle drive |
| EP1088623A2 (en) | 1999-10-01 | 2001-04-04 | SMC Kabushiki Kaisha | Electric clamp apparatus |
| EP1149665A2 (en) | 2000-04-28 | 2001-10-31 | SMC Kabushiki Kaisha | Electric clamp apparatus |
| US6416045B1 (en) | 2000-07-25 | 2002-07-09 | Norgren Automotive, Inc. | Rotary clamp having predetermined adjustable clamping angles |
| EP1179394A2 (en) | 2000-08-03 | 2002-02-13 | Norgren Automotive Inc. | Over-center power clamp toggle mechanism |
| EP1262285A2 (en) | 2001-04-30 | 2002-12-04 | Btm Corporation | Adjustable stroke clamp |
| DE10136057C1 (en) | 2001-07-25 | 2002-10-02 | Tuenkers Maschinenbau Gmbh | Knee-lever clamping, especially for use in body structure of motor vehicles, has clamping head and a drive which is axially connected to it |
| EP1310332A2 (en) * | 2001-11-05 | 2003-05-14 | Luciano Migliori | Electrically operated clamping device |
| DE102004007346B3 (en) | 2003-11-04 | 2005-04-21 | Tünkers Maschinenbau Gmbh | Road vehicle bodywork manufacturing tool with knee joint clamping system and point welding tool has cylinder with working piston and braking piston with piston rod fitting in bore in working piston rod |
| EP1849559A1 (en) | 2006-04-27 | 2007-10-31 | UNIVER S.p.A. | Positioning and/or clamping apparatus, with adjustable opening position of the working arm |
| EP2016290A1 (en) | 2006-05-10 | 2009-01-21 | TÜNKERS MASCHINENBAU GmbH | Procedure for the loading of a working cylinder, control module for it, working cylinder and utilization of the same |
| EP1878539B1 (en) | 2006-06-26 | 2009-04-15 | UNIVER S.p.A. | Clamping and/or centering device for work pieces, with manually settable operative positions |
| EP2055430B1 (en) | 2007-10-29 | 2009-06-10 | UNIVER S.p.A. | Toggle joint clamping device |
| EP2177320A1 (en) * | 2008-10-15 | 2010-04-21 | UNIVER S.p.A. | Irreversible-type toggle-lever drive device |
| DE202015004786U1 (en) | 2014-10-06 | 2015-08-14 | Olaf Und André Tünkers Gbr (Vertretungsberechtigter Gesellschafter: Dipl.-Ing. Olaf Tünkers, 40885 Ratingen) | Toggle clamping device, in particular for use in the bodywork of the automotive industry |
| DE102014014857B3 (en) | 2014-10-06 | 2015-11-12 | Olaf Und André Tünkers Gbr (Vertretungsberechtigter Gesellschafter: Dipl.-Ing. Olaf Tünkers, 40885 Ratingen) | Toggle clamping device, in particular for use in the bodywork of the automotive industry |
| WO2016055138A1 (en) | 2014-10-06 | 2016-04-14 | Olaf Und Andre Tünkers Gbr | Toggle clamp device, in particular for use in vehicle body manufacturing in the automotive industry |
Non-Patent Citations (4)
| Title |
|---|
| ANONYMOUS: "Catalogue General", GENUSTECH BROCHURE, 1 June 2000 (2000-06-01), pages 109pp, XP055961341 |
| ANONYMOUS: "Dispositifs de serrage", UNIVER BROCHURE, 28 June 2011 (2011-06-28), pages 14pp, XP055961468 |
| ANONYMOUS: "Serrages Pneumatiques CNOMO, Serie CP-01", GENUSTECH BROCHURE, 1 July 2006 (2006-07-01), pages 1 - 20, XP055961338 |
| TUNKERS®: "Universalspanner U/U2 63, 80 BR5 A40", DATENBLATT, 26 June 2020 (2020-06-26), XP055961325 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108857966A (en) * | 2017-05-15 | 2018-11-23 | 奥拉夫和安德烈德珂斯协会 | For using the curved lever clamping device in the body structure of automotive industry |
| CN108857966B (en) * | 2017-05-15 | 2021-04-30 | 奥拉夫和安德烈德珂斯协会 | Bent lever clamping device for use in a body structure of the motor vehicle industry |
| IT202000003805A1 (en) * | 2020-02-24 | 2021-08-24 | Pneumax S P A | ACTUATION UNIT OF THE TYPE WITH ARTICULATED LEVER OR ELECTRICALLY OPERATED CAM |
| IT202000003784A1 (en) * | 2020-02-24 | 2021-08-24 | Pneumax S P A | ACTUATION UNIT OF THE TYPE WITH ARTICULATED LEVER OR ELECTRICALLY OPERATED CAM |
| WO2021171189A1 (en) * | 2020-02-24 | 2021-09-02 | Pneumax S.P.A. | Electrically operated actuating unit of the articulated lever or cam type |
Also Published As
| Publication number | Publication date |
|---|---|
| ITUB20153120A1 (en) | 2017-02-13 |
| EP3130809B1 (en) | 2023-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3130809B1 (en) | Optimized efficiency actuating unit of the articulated lever type | |
| DE102006041707B4 (en) | Piston-cylinder unit (working cylinder) for clamping, and / or pressing, and / or joining, and / or punching, and / or embossing, and / or punching and / or welding, for example, with the interposition of a toggle joint arrangement | |
| US10933487B2 (en) | Spot welding apparatus | |
| US5819574A (en) | Hydraulic device for bending work and a bending device with the hydraulic device mounted thereon | |
| US8678304B2 (en) | Method of activating a mountable hydraulic appliance, and such mountable hydraulic appliance, in particular for demolition, comminution or recycling | |
| US20150336250A1 (en) | Tool device for the connection of a plastic pipe or of a composite metal/plastic pipe to a fitting by way of a sliding sleeve or compression sleeve | |
| DE102009040126A1 (en) | Electromotive hydraulic drive and method for providing a defined hydraulic pressure and / or volume | |
| CN202239110U (en) | U-shaped beam bender | |
| CN105782154B (en) | The control method of hydraulic pressure processing machine and its hydraulic system and the hydraulic system | |
| CN106180243B (en) | Variable extrusion die device | |
| US5349151A (en) | Low impact flow control device | |
| CN105269337B (en) | A kind of microscope carrier mechanism of the universal translation of energy | |
| CN106989073B (en) | Electrohydraulic controlling mechanism | |
| US20140251166A1 (en) | Manually operated press | |
| CN105937592B (en) | Double-cam crank mechanism | |
| ITUA20164496A1 (en) | METHOD OF LINEAR DRAWING OF WOVEN METALLIC THREAD WITH THE USE OF SATELLITE ROLLER SCREWS OR SPIRAL BALL RECIRCULATION APPLIED TO A LINEAR DETACHING MACHINE | |
| CN109649482A (en) | Vehicle hydraulic steering system | |
| CN109915424A (en) | A kind of arm of force adjustable lever formula electromagnetism valve-controlled cylinder hydraulic transformer | |
| US20200331121A1 (en) | Toggle clamp device, in particular for use in vehicle body manufacturing in the automotive industry | |
| US3125000A (en) | Airfoil controlling actuator | |
| US11454258B2 (en) | Fluid-driven drive | |
| Gharat et al. | Design and Fabrication of Pneumatic Punching and Bending Machine | |
| EP1818493A3 (en) | A mechanism for opening a closure | |
| US20050082333A1 (en) | Machine for automatically applying buttons or other metal fittings on a support such as a support fabric, including a mechanism for controlling the overpressure due to the presence of enlarged thickness portions | |
| CN203611180U (en) | Wrench for machine vice |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20170630 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20191001 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20230412 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230329 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602016081533 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20230802 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1595054 Country of ref document: AT Kind code of ref document: T Effective date: 20230802 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231202 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230802 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230802 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231204 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231102 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230802 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230802 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230802 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231202 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230802 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231103 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230802 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230802 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20231002 Year of fee payment: 8 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 602016081533 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230802 |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PLAB | Opposition data, opponent's data or that of the opponent's representative modified |
Free format text: ORIGINAL CODE: 0009299OPPO |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| 26 | Opposition filed |
Opponent name: OLAF UND ANDRE TUENKERS GBR Effective date: 20240226 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230805 |
|
| R26 | Opposition filed (corrected) |
Opponent name: OLAF UND ANDRE TUENKERS GBR Effective date: 20240226 |