EP2998480A1 - Elektromechanisches Zugangskontrollsystem und Verfahren - Google Patents
Elektromechanisches Zugangskontrollsystem und Verfahren Download PDFInfo
- Publication number
- EP2998480A1 EP2998480A1 EP14185845.6A EP14185845A EP2998480A1 EP 2998480 A1 EP2998480 A1 EP 2998480A1 EP 14185845 A EP14185845 A EP 14185845A EP 2998480 A1 EP2998480 A1 EP 2998480A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- coupling element
- sensor
- drive
- control unit
- coupling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 108
- 238000010168 coupling process Methods 0.000 claims abstract description 379
- 238000005859 coupling reaction Methods 0.000 claims abstract description 372
- 230000008878 coupling Effects 0.000 claims abstract description 303
- 230000013011 mating Effects 0.000 claims description 10
- 230000001105 regulatory effect Effects 0.000 claims description 7
- 230000002829 reductive effect Effects 0.000 claims description 6
- 230000001276 controlling effect Effects 0.000 claims description 5
- 230000004044 response Effects 0.000 claims description 3
- 230000005540 biological transmission Effects 0.000 description 35
- 230000004888 barrier function Effects 0.000 description 23
- 230000008569 process Effects 0.000 description 18
- 238000004146 energy storage Methods 0.000 description 6
- 238000003780 insertion Methods 0.000 description 6
- 230000037431 insertion Effects 0.000 description 6
- 230000009471 action Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 230000009467 reduction Effects 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 238000013475 authorization Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000018109 developmental process Effects 0.000 description 2
- 210000003746 feather Anatomy 0.000 description 2
- WVHNUGRFECMVLQ-UHFFFAOYSA-N 1,3-dichloro-2-(2,4-dichlorophenyl)benzene Chemical compound ClC1=CC(Cl)=CC=C1C1=C(Cl)C=CC=C1Cl WVHNUGRFECMVLQ-UHFFFAOYSA-N 0.000 description 1
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 238000005253 cladding Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000006837 decompression Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 229910052744 lithium Inorganic materials 0.000 description 1
- 229910001172 neodymium magnet Inorganic materials 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 239000003223 protective agent Substances 0.000 description 1
- 230000001846 repelling effect Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images






















Classifications
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B47/06—Controlling mechanically-operated bolts by electro-magnetically-operated detents
- E05B47/0676—Controlling mechanically-operated bolts by electro-magnetically-operated detents by disconnecting the handle
- E05B47/068—Controlling mechanically-operated bolts by electro-magnetically-operated detents by disconnecting the handle axially, i.e. with an axially disengaging coupling element
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B47/06—Controlling mechanically-operated bolts by electro-magnetically-operated detents
- E05B47/0611—Cylinder locks with electromagnetic control
- E05B47/0638—Cylinder locks with electromagnetic control by disconnecting the rotor
- E05B47/0642—Cylinder locks with electromagnetic control by disconnecting the rotor axially, i.e. with an axially disengaging coupling element
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B15/00—Other details of locks; Parts for engagement by bolts of fastening devices
- E05B15/0033—Spindles for handles, e.g. square spindles
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B15/00—Other details of locks; Parts for engagement by bolts of fastening devices
- E05B15/02—Striking-plates; Keepers; Bolt staples; Escutcheons
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B17/00—Accessories in connection with locks
- E05B17/10—Illuminating devices on or for locks or keys; Transparent or translucent lock parts; Indicator lights
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B47/0001—Operating or controlling locks or other fastening devices by electric or magnetic means with electric actuators; Constructional features thereof
- E05B2047/0014—Constructional features of actuators or power transmissions therefor
- E05B2047/0018—Details of actuator transmissions
- E05B2047/0023—Nuts or nut-like elements moving along a driven threaded axle
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B2047/0048—Circuits, feeding, monitoring
- E05B2047/0057—Feeding
- E05B2047/0058—Feeding by batteries
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B2047/0048—Circuits, feeding, monitoring
- E05B2047/0065—Saving energy
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B2047/0048—Circuits, feeding, monitoring
- E05B2047/0067—Monitoring
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B2047/0084—Key or electric means; Emergency release
- E05B2047/0086—Emergency release, e.g. key or electromagnet
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B2047/0094—Mechanical aspects of remotely controlled locks
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B2047/0097—Operating or controlling locks or other fastening devices by electric or magnetic means including means for monitoring voltage, e.g. for indicating low battery state
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B3/00—Fastening knobs or handles to lock or latch parts
- E05B3/06—Fastening knobs or handles to lock or latch parts by means arranged in or on the rose or escutcheon
- E05B3/065—Fastening knobs or handles to lock or latch parts by means arranged in or on the rose or escutcheon with spring biasing means for moving the handle over a substantial distance, e.g. to its horizontal position
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B47/0001—Operating or controlling locks or other fastening devices by electric or magnetic means with electric actuators; Constructional features thereof
- E05B47/0012—Operating or controlling locks or other fastening devices by electric or magnetic means with electric actuators; Constructional features thereof with rotary electromotors
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B63/00—Locks or fastenings with special structural characteristics
- E05B63/04—Locks or fastenings with special structural characteristics for alternative use on the right-hand or left-hand side of wings
Definitions
- the invention relates to an electromechanical access control system for a building door.
- the access control system has a coupling element and a counter-coupling element.
- the coupling element is in an engaged position in operative connection with the counter-coupling element and in a disengaged position out of operative connection with the counter-coupling element.
- the access control system has a drive, in particular an electric motor, which moves the coupling element between the engaged position and the disengaged position, according to the preamble of claim 1.
- the invention relates to a method according to independent claim 5.
- Access control systems with a coupling element which, moved by a motor, can be brought into operative connection with a counter-coupling element are known.
- z. B. an operative connection to a lock can be made.
- the coupling element assumes an intermediate position lying between the engaged and disengaged positions.
- a spring element is acted upon. The spring element can move the coupling element in the engaged position upon a change of the geometric position, which allows a movement in the engaged position.
- the invention has for its object to provide an electromechanical access control system and a method for controlling and / or regulating a drive available, which at least partially eliminate the aforementioned disadvantage, in particular access control system and a method to provide energy-saving work.
- the access control system has at least one sensor for identifying at least one position of the coupling element and a control unit which controls and / or regulates the drive as a function of a signal of the sensor transmitted to the control unit.
- a position of the coupling element can be detected.
- the sensor transmits a signal to the control unit, which is indicative of the position of the coupling element.
- the control unit uses the position information obtained from the sensor the coupling element to control and / or regulate the drive. Because such cooperation exists between the sensor and the control unit in the access control system according to the invention, the control unit can decide on the basis of the position of the coupling element how to control and / or regulate the motor.
- a certain intelligence has been created, which makes it possible to control whether a coupling or disengaging has led to the position to be reached of the coupling element and to tune the further control and / or regulation of the drive on it.
- it can be dispensed with a spring element. As a result, electrical energy can be saved.
- an energy store in particular a battery or a rechargeable battery, can provide electrical power for the drive.
- the drive can be configured as an electric motor, in particular as a bell armature motor.
- the engaged and / or the disengaged position can be marked.
- both the engaged and disengaged positions are identified by the sensor.
- the sensor transmits different signals to the control unit, in particular for the engaged and disengaged positions.
- the coupling element may act on the sensor in the disengaged position. Accordingly, the coupling element does not act or not enough on the sensor in the engaged position.
- the sensor in the disengaged position, transmits a signal indicative of an action of the coupling member to the control unit, while in the engaged position the sensor transmits a signal indicative of a missing or insufficient action of the coupling member to the control unit.
- the action may occur in the engaged position but not in the disengaged position and corresponding signals may be transmitted.
- the drive moves the coupling element linearly.
- the coupling element is moved away from the drive and / or moved toward the drive during a disengaging process.
- a drive arrangement by means of which the coupling element is moved, can have a spindle or a worm next to the drive.
- the coupling element In the engaged position, the coupling element is in operative connection with the counter-coupling element.
- This is understood in particular the positions in which the coupling element is positively and / or non-positively connected to the counter-coupling element or the coupling element positively and / or non-positively by an operation of the access control system by a user with the counter-coupling element is connectable.
- operative connection in particular a force or a torque can be transmitted from the coupling element to the counter-coupling element.
- the access control system can serve to cause an effect on the building door by a user's operation. If, on the other hand, the coupling element is in the disengaged position, an actuation of a user does not have any effect on a building door.
- the access control system can be operated directly or indirectly by the user.
- the access control system can be designed as a fitting, as a fitting body, as a rotary knob or as a lock cylinder.
- the action for the building door may be in a movement of a latch and / or a bolt, which is made possible by the engaged position.
- the user an actuating element, for. B. a handle, in particular a door handle, a fitting, a knob or a key operated.
- the torque generated thereby is transferable to the coupling element. If the coupling element is in the engaged position, the torque is transmitted to the counter-coupling element.
- the counter-coupling element serves to establish an operative connection with the latch and / or the latch, so that the torque generated by the user can be transferred to the latch and / or the latch.
- the coupling element is in the disengaged position, the torque is not transmitted to the counter-coupling element, so that the latch and / or the latch can not be moved.
- the actuator may be part of the access control system or connectable to the access control system.
- the case and / or the latch may be part of the access control system or at least indirectly connectable to the access control system.
- the counter-coupling element and the transmission element can be with each other, for. B. positive and / or non-positively connected, that the transmission element rotates with the counter-coupling element.
- the coupling element is moved only after authentication of an authorized user in the engaged position.
- an authentication code is received in particular wirelessly with the aid of a transmitting and / or receiving unit.
- the access control system can be designed as a fitting body.
- the fitting body can be used to arrange, in particular system, to a building door.
- the fitting body can be arranged outside a lock case of a lock, which has the bolt and / or the latch.
- the fitting body can be designed in particular as a door plate or as a rosette.
- the fitting body can be connected to the handle.
- the fitting body can serve for the storage of the handle.
- the fitting body can be connectable to a transmission element.
- the transmission element serves to transmit a torque from the handle to a lock.
- the transmission element protrude from the back of the fitting body.
- the transmission element can, for. B. in the Lock, especially in a nut of the castle, be plugged.
- the fitting body may have at least one receptacle for receiving a fastening element which serves for fastening to the building door.
- the access control system can be designed as a fitting.
- the fitting has the handle next to the fitting body.
- the fitting may have the transmission element or be connectable to the transmission element.
- the access control system can be designed as a rotary knob.
- the knob is connected to a cylinder adapter or connectable, whereby a door closure is realized.
- the knob can transmit a torque to the cylinder adapter, whereby a building door can be locked or unlocked or a case can be operated.
- the coupling element and mating coupling element are present, so that the rotary knob can be brought into a coupled state or in a disengaged state, so that an access control is made possible by only the authorized accession of the rotary knob is brought into a coupled state, so that only for the authorized access the building door can be unlocked.
- the rotary knob has in particular a cylindrical base body which can be fastened by means of the raster shaft in a cylinder adapter of the building door.
- the raster shaft preferably has a flange which covers an end face of the cylindrical base body.
- a clutch shaft is guided out of the rotary knob within the hollow grid shaft and operatively connected to the cylinder adapter.
- the main body To engage the rotary knob, the main body must be operatively connected to the coupling shaft.
- the coupling element is advantageously attached to the main body of the rotary knob, so that a rotation of the rotary knob via coupling element and counter-coupling element, that is, coupling shaft, is transferable to the cylinder adapter. This means that in a disengaged state, the entire rotary knob with the exception of the clutch shaft is freely rotatable while in the engaged state, the entire rotary knob incl.
- the clutch shaft is rotatable.
- the rotary knob particularly preferably has a counter-coupling element which has the shape of a coupling shaft.
- the coupling shaft in particular has a flange, wherein the flange has at least one coupling nose.
- the flange of the coupling shaft and the coupling nose are applied to the flange of the raster shaft.
- the coupling nose serves as a counter element for the coupling element by the coupling element can be brought into operative connection with the coupling nose.
- the position indication "behind" means that the flange of the raster shaft is disposed closer to the building door.
- the flange of the raster shaft has a recess into which the coupling element engages.
- the coupling element projects rearwardly of the coupling nose, that is, toward the building door.
- the recess that the coupling element collides with the flange of the raster shaft.
- the access control system may be configured to actuate the actuator both when the coupling member is in the disengaged position and when the coupling member is in the engaged position.
- first sensor and a second sensor are present in the access control system.
- the first sensor and the second sensor each transmit a signal to the control unit for the engaged position and for the disengaged position.
- the first sensor and the second sensor may thus each provide a signal indicative of whether the coupling element is in the engaged or disengaged position.
- the signal of the first sensor for the engaged position may differ from the signal of the second sensor for the engaged position.
- the signal of the first sensor for the disengaged position may be different from the signal of the second sensor for the disengaged position.
- the coupling element in the disengaged position on the first sensor but not or insufficiently act on the second sensor.
- the coupling element in the engaged position may act on the second sensor, but not or insufficiently on the first sensor.
- the first sensor transmits a signal indicative of an action of the coupling element to the control unit.
- the second sensor transmits in the disengaged position, however, a signal that signals a missing or insufficient effect of the coupling element to the control unit. Conversely, it is in the engaged position.
- the first and the second sensor transmit signals to the control unit, which differ from the combination of the signals of the first and the second sensor for the engaged and for the disengaged position.
- the intermediate position is understood to mean a position which lies between the engaged and disengaged positions.
- a stop in the intermediate position exists when the coupling element during a Einkupplungsvorgangs is prevented by a faulty geometric position from reaching the engaged position.
- the coupling element can act both on the first and on the second sensor, so that the first and the second sensor transmit a corresponding signal to the control unit.
- the coupling element can act on neither the first nor the second sensor sufficiently, so that the sensors each transmit a corresponding signal to the control unit.
- the at least one sensor in particular the first and the second sensor, can be designed as a light sensor.
- the access control system can have at least one light source as a transmitter whose light can be received by the sensor.
- a light source is provided for each sensor.
- the sensor and the light source can each form a light barrier, in particular a transmission light barrier. If it is a transmission barrier, then the coupling element acts on the sensor by the coupling element interrupts the light beam provided for the sensor. If it is a reflection barrier, then the coupling element acts on the sensor by the coupling element reflects the light beam.
- the at least one sensor in particular the first and the second sensor, can be arranged on a printed circuit board.
- the control unit is arranged on the same printed circuit board.
- the entire light barrier preferably the light barriers of the first and the second sensor, is arranged on the one printed circuit board.
- a light barrier may be arranged on each side of the printed circuit board.
- the printed circuit board acts as a light sheath between the light barriers.
- the printed circuit board can have a bulge for arranging the light barrier around the coupling element.
- the light barrier is arranged around the bulge, so that the coupling element can interrupt the light beam when moving in the bulge.
- the bulge preferably tapers from an edge of the printed circuit board into the interior of the printed circuit board. As a result, the circuit board can be easily arranged around the coupling element.
- the coupling element may have a transmissive region for transmitting a light to the sensor. As a result, the coupling element can be made spatially compact.
- the coupling element in particular of the rotary knob, may in particular be a coupling slide.
- the coupling slide has an additional web, wherein this web is usable for determining the position of the coupling slide.
- the web breaks through in a disengaged position of the coupling element, a first photocell, while the web breaks through a second photocell in an engaged position of the coupling element.
- the web can be arranged in an intermediate position, in which neither the first nor the second light barrier are broken.
- the coupling element can be rotatable with the actuating element, in particular with the handle or the rotary knob, both in the engaged position and in the disengaged position.
- the sensor transmits preferably for the engaged and / or for the disengaged position of the coupling element, regardless of the position of the actuating element, the same signal to the control unit.
- the sensor can always generate the same signal. Accordingly, the sensor can always generate the same signal regardless of the position of the actuator in the engaged position. As a result, an independent of the position of the actuating element signal can be generated.
- the coupling element may be spatially configured such that a different arrangement of the coupling element to the sensor has no effect on the signal of the sensor.
- the translucent area be dimensioned such that light can pass through the translucent area at any possible position of the actuating element.
- a collimator may be provided which directs the light into the translucent area.
- the senor rotates with the actuating element.
- the control unit can decide on the basis of the position of the coupling element how the drive is to be controlled and / or regulated.
- a certain intelligence has been created, which makes it possible to control whether a coupling or disengaging has led to the position to be reached of the coupling element and to tune the further control and / or regulation of the drive on it.
- the method is described for a sensor. Instead of the one sensor, it is also possible to use a plurality of sensors, in particular the described first and second sensor.
- the control unit may preferably record a time and control and / or regulate the drive as a function of time.
- the control unit controls the drive as a function of time, without the signal of the sensor being taken into account.
- the control unit controls and / or regulates the drive in dependence on the signal of the sensor, without taking into account a detected time.
- the control unit controls and / or regulates the drive as a function of the detected time and in dependence on the signal of the sensor.
- control unit controls and / or regulates both the engagement process and the disengagement process based on the sensor signal.
- control unit starts and / or stops the drive as a function of the transmitted signal from the sensor.
- control unit starts and / or stops the drive only in response to the transmitted signal from the sensor.
- the access control system may in particular have a receiving and / or transmitting unit.
- the receiving and / or transmitting unit is used for the wireless reception of an authentication code.
- the authentication transmitter can be passive, ie without its own power supply, or active, ie with its own power supply, be designed.
- the authentication encoder can be designed as a passive or as an active transponder.
- an RFID transponder is conceivable.
- the received authentication code is checked with a stored in the access control system and / or also by an authorized body also received comparison code or with a stored in the access control system and / or also by an authorized body also received default. If the check is positive, ie if, for example, the authentication code and the comparison code match, the authorized user is authenticated and the connection process can be started.
- Another condition for starting a decoupling operation may be that a predetermined dwell time has elapsed since reaching the engaged position. Thus, an unauthorized user arriving after the authorized user can not act on the lock.
- control unit can stop the drive if the control unit determines from the signal from the sensor that the position of the coupling element to be reached has been reached.
- the control unit checks the signals of the sensor during a coupling process with a fixed frequency. If the control unit determines on the basis of the signal that the position to be reached, ie the engaged or disengaged position, has been reached, the control unit immediately stops the drive. The stopping of the drive takes place in particular independently of a specified time interval for reaching the position to be reached.
- the coupling element In the disengaged position, the coupling element can be arranged at a distance from a component arranged in front of a path for the coupling-in operation.
- the component may in particular be the drive.
- the coupling element in the engaged position, can be arranged at a distance from a component arranged behind the path. As a result, a jamming of the coupling element can be avoided.
- the engaged and / or the disengaged Position which is spaced from a front or behind the path arranged component, are met.
- the control unit preferably stops the drive if, after a defined time interval, the control unit determines from the signal from the sensor that the position of the coupling element to be reached has not been reached.
- the time interval can be stored in the control unit. If the coupling element z. B. in the intermediate position, the control unit can stop the drive and thus save energy and prevent damage.
- control unit restarts the drive after a predetermined pause interval.
- the pause interval can be stored in the control unit.
- the drive is restarted to reach the position to be reached.
- the position to be reached may be the engaged position. This ensures that despite a stop in the intermediate position, the engaged position can still be achieved.
- z. B. by actuation of the actuating element by the user, the coupling element does not reach the engaged position.
- the user can release the actuator of the fitting in the pause interval and return the actuator by a spring in a rest position, so that the required for the engagement position of the coupling and the counter-coupling element is achieved achieved during the pause interval.
- the necessary for the engagement position of the coupling and the counter-coupling element can be achieved in a rotary knob by a further rotation of the user during the pause interval.
- the position to be reached may be the disengaged position. As a result, an interruption of the active connection is sought.
- the drive can also be restarted to reach a position other than the position to be reached. For example, after several unsuccessful engagement operations, the clutch member may be moved to the disengaged position.
- At least a predetermined number of re-starts of the drive can be stored in the control unit in order to reach the position to be reached of the coupling element after a pause interval.
- the pause interval may vary or remain constant depending on the re-starts already performed. There may also be several numbers of reboots in the control unit to vary the pause interval.
- an error signal in particular an optical error signal, can be output.
- the control unit varies the electric power for the drive during a coupling operation. It is particularly conceivable that the access control system is designed such that during a movement of the coupling element from the disengaged position to the engaged position and / or a movement from the engaged position to the disengaged, the electric power of the drive is reduced.
- the electrical power of the drive can be selected particularly high.
- the initially selected electrical power contributes to the speed of the engagement and / or disengagement process.
- an active engine braking can be used with particular preference.
- the control unit may select the electric power of the drive at the start of the drive, when the coupling element is in the intermediate position, lower than the electric power of the drive at start of the drive when the coupling element is in the engaged and / or disengaged position. Due to the fact that the coupling element is already closer to the position to be reached in the intermediate position, the reduced electrical power may be sufficient to quickly move the coupling element to the desired position and to stop it quickly enough.
- the time interval for a clutch engagement operation from the disengaged position may be selected to be greater than the time interval for a clutch engagement operation from the intermediate position and / or as the time interval for a decoupling operation.
- the pause interval when disengaging may be longer than the pause interval when engaging.
- the time interval for a coupling operation from the engaged position may be between 0.1 s and 2 s
- the time interval for a coupling operation from the intermediate position may be between 0.05 s and 1 s
- the time interval for a disengaging operation may be between 0.1 s and 1
- the pause interval for a clutch-in operation may be between 0.1 s and 1 s
- the pause interval for a clutch-off operation may be between 1 s and 10 min by way of example.
- an amount of charge of the energy storage required to move the coupling member from the disengaged position to the engaged position without stopping in the intermediate position for example, in a range of 50mA to 200mA, preferably in one range from 50 mAs to 150 mAs, more preferably in a range from 55 mAs to 100 mAs.
- An amount of charge of energy storage required to move the coupling element from the engaged position to the disengaged position Position may range from 10 mAs to 70 mAs, more preferably from 10 mAs to 50 mAs.
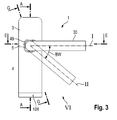
- the access control system 1 is designed as a fitting 1 and in the Figures 1 and 2 shown.
- the fitting 1 has a fitting body 2 according to the invention, a handle 30 as an actuating element, a transmission element 26 and fastening elements 60.
- the handle 30 is designed as a door handle.
- the transmission element 26 serves to be inserted into a nut of a lock and to transmit a torque of the handle 30 to the lock and thus to actuate a latch and / or a bolt.
- the fasteners 60 are used to attach the fitting 1 to a building door.
- the handle 30 can take various positions.
- the handle 30 In a ready-assembled state of the fitting 1, the handle 30 can only between a rest position I, as in FIG. 3 shown in a solid line, and an operating position II, as in FIG. 3 shown by a dashed line, to be moved.
- the positions of the handle 30 which can be received in the assembled operational state are referred to as operating positions.
- An operating angle BW is defined as the angle between the rest position of the handle and the operating position of the handle.
- FIG. 4 Parts of an inventive fitting body 2 are shown in an exploded view.
- the fitting body 2 is formed with a front side 101, a back side 102 and side surfaces 103, 104, 105, 106, such as in the Figures 1 and 2 shown.
- the fitting body 2 has a carrier 10, such as FIG. 4 shows.
- the carrier 10 is provided with a front side 111, one in FIG. 4 concealed rear 112 and sides 113, 114, 115, 116 are formed.
- the carrier 10 is monolithically formed from a metal.
- the carrier 10 has a carrier body 19 and a bearing element 11.
- the bearing element 11 protrudes forward from the carrier body 19.
- the bearing element 11 serves to support the handle 30.
- the bearing element is received in the handle 30.
- a bearing sleeve 33 is provided, which serves for the haptic pleasant operation of the handle 30 and to reduce the wear of the handle 30 and the bearing element 11.
- the aperture 9 is composed of aperture elements 3, 4, 5 and another in the FIGS. 1 and 3 shown aperture element 49, which is used in the aperture element 5, together.
- On the rear side 112 close to the carrier cover elements 6, 7 at.
- the diaphragm elements 3, 4, 5, 49 and the cover elements 6, 7 are each formed separately from each other.
- diaphragm element 3, 4 As in FIGS. 1 and 2 illustrated, form the diaphragm element 3, 4 a flat, projection-free surface. Only around the handle 30 around the aperture 9 may have a slight elevation.
- the fitting 1 is designed as an electromechanical fitting 1.
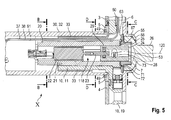
- the fitting 1 a drive 22 which is designed as an electric motor, on. Via a spindle 23, the drive 22 moves a coupling element 24, which is guided in a mounting element 20.
- the coupling element 24 can be in an engaged position X, the in FIG. 5 is shown to be moved.
- the coupling element 24 engages in an opening 73 of the counter-coupling element 25 of the fitting body 2.
- the counter-coupling element 25 circumferentially surrounds the coupling element 24, as in FIG. 10 shown.
- the mounting element 20 and the handle 30 are non-rotatably connected to each other, in particular by a splined shaft.
- Coupling element 24 is guided in the mounting member 20, the coupling member 24 moves with a rotation of the handle 30 from a rest position I in an operating position II with the handle 30 with.
- a torque from the handle 30 transmits to the coupling element 24.
- the coupling element 24 engages in the counter-coupling element 25, the torque can be transmitted to the counter-coupling element 25 and to the non-rotatably connected to the counter-coupling element 25 transmission element 26.
- the torque may act on the lock.
- a clearance between the coupling element 24 and the counter-coupling element 25 is provided. Therefore, it may be that the user first has to move the handle 30 before, in the engaged position X, the coupling element 24 transmits a torque to the counter-coupling element 25.
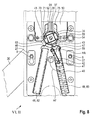
- a disengaged position XI which in FIG. 6 is shown, the coupling element 24 is disengaged from the counter-coupling element 25. Even in the disengaged position XI, the handle 30 can be actuated. The coupling element 24 also rotates with the handle 30 in the disengaged position XI. However, a torque in the disengaged position XI can not be transmitted to the counter-coupling element 25. Thus, a movement of the handle 30 has no effect on the lock.
- an intermediate position XII of the coupling element 24 is shown in dashed lines, in which the coupling element 24 is located when the drive 22 tries to move the coupling element 24 in the engaged position X, but not due to an already made rotation of the coupling element 24 in the counter-coupling element 25th can engage, but abuts the counter-coupling element 25.
- FIG. 9 an upper part of the interior of the fitting 1, wherein, inter alia, the handle 30, the carrier 10, the aperture 9, the Covering elements 6, 7 and the transmission element 26 are not shown.
- the battery compartment 34 serves to receive at least one energy storage 57, in particular a battery or accumulator, with the aid of the drive 22 electrical power can be supplied.
- the coupling element 24 is at least partially in the handle 30, as in FIG FIG. 6 shown.
- the handle 30 is designed to be hollow.
- the coupling element 24, the counter-coupling element 25, the transmission element 26 and the handle 30 are located on a common axis 120.
- the drive 22, a motor pocket 21 for the drive 22 and the coupling element 24 are received in the mounting element 20.
- the mounting element 20 is rotatably mounted in the hollow bearing element 11. In this case, the mounting element 20 projects beyond the bearing element 11 to the front, so that the mounting element 20 via in FIG. 4 shown positive engagement means 96 can form a positive connection with the handle 30. In this case, an inner side of the hollow handle 30 has a corresponding positive locking means 58.
- the mounting member 20 is also partially disposed in the hollow handle 30 here.
- the fitting 1 has a transmitting and receiving unit with which an authentication code can be received wirelessly.
- the transmitting and receiving unit can be a in FIG. 9 have antenna 51 shown schematically.
- the antenna 51 is arranged on a circuit board 68.
- the authentication code can be transmitted from an external portable authentication transmitter to the transmitting and receiving unit.
- a control unit 56 which is arranged on a printed circuit board 50, checks the authentication code and compares it with a comparison code or a default.
- the control unit 56 is in FIG. 9 covered by the board 68 and therefore shown only dashed. If the review is positive and vote z.
- the control unit 56 starts a lock-in procedure according to FIG FIG. 11 ,
- the board 68 is disposed with the antenna 51 within the carrier 10. In this way, a particularly flat fitting 1 can also be achieved.
- the first diaphragm element 3 and the first cover element 6 cover the antenna 51.
- the first diaphragm element 3 and the first cover element 6 are made of a plastic.
- the carrier 10 is formed in the region of the antenna 51 as a passage opening.
- the through-hole serves as an electronic receptacle 13 for the circuit board 50 and the circuit board 68 connected to the circuit board 50.
- the support 10 has a gap 84 through which an electrically conductive connection around the antenna 51 is interrupted, as in FIG FIG. 4 shown.
- the board 68 on an unillustrated antenna element for receiving a comparison code or the default. Signals are received at a higher frequency than the antenna 51 via the antenna element.
- the fitting 1 has a first sensor 53 and a second sensor 54.
- a first light source 44 is provided, whose light beam can be received by the first sensor 53.
- a second light source 45 is provided, whose light beam can be received by the second sensor 54.
- the first sensor 53 and the first light source 44 together form a first light barrier, which in the FIGS. 4 and 9 is shown.
- the second sensor 54 and the second light source 45 together form a second light barrier, which in the FIGS. 7 and 8th is shown.
- the first and the second photoelectric sensors 53, 54, 44, 45 are arranged on the printed circuit board 50.
- the first light barrier 53, 44 and the second light barrier 54, 45 are formed on different sides of the printed circuit board 50.
- the printed circuit board 50 acts as a light sheath between the light barriers 53, 54, 44, 45.
- the printed circuit board 50 has a bulge 75 for the arrangement of the light barriers 53, 54 44, 45 to the coupling element 24.
- the sensors 53, 54 indicate the engaged and disengaged positions X, XI. As in FIG. 5 shown, in the engaged position X, the first sensor 53 can receive a light beam of the light source 44.
- the first sensor 53 transmits a signal, which interprets the control unit as "1", to the control unit 56.
- the second sensor 54 can not receive a light beam from the light source 45, since the coupling element 24 interrupts the light beam.
- the second sensor 54 transmits a signal which the control unit interprets as "0" to the control unit 56.
- the first sensor 53 can receive no light beam from the light source 44, since the coupling element 24 interrupts the light beam. In this case, the first sensor 53 transmits a signal that the control unit interprets as "0" to the control unit 56.
- the second sensor 54 can receive a light beam from the light source 45. The second sensor 54 transmits a signal
- the control unit 56 can detect in which of the two positions X, XI the coupling element 24 is located.
- the coupling element 24 has a light-permeable region 28 which is formed as a passage opening, as in FIGS FIGS. 4 . 5 and 6 shown.
- the mounting member 20 has a light passage 70, as in Figs FIGS. 4 . 6 . 7 and 8th shown.
- the light passage 70 results from the fact that a guide member 71 of the mounting member 20 is interrupted as in the FIGS. 7 and 8th shown.
- the guide part 71 serves to engage in a circumferential groove of the counter-coupling element 25, as in FIG. 5 shown. hereby the mating coupling element 25 is aligned with the mounting element 20.
- a collimator 55 is inserted, as in the FIGS. 4 . 7 and 8th shown.
- FIGS. 7 and 8th rear views of the fitting 1 are shown.
- the transmission element 26, the counter-coupling element 25 and the cover 7 are not shown in each case.
- FIG. 7 shows a view in the rest position I and FIG. 8 the same view in the operating position II.
- the collimator 55 both in the rest position I and in the actuation position II directs the light beam through the light passage 70.
- the collimator 55 directs the light beam in the remaining operating positions through the light passage 70.
- the collimator 55 passes the light beam through the translucent area 28 in the engaged position X for all operating positions.
- the signal that the sensors 53, 54 transmit to the control unit 56 is independent of the operating position of the handle 30.
- the coupling element 24 In the engaged position X of the coupling element 24, the coupling element 24 is arranged at a distance from the transmission element 26 located behind the coupling element 24. In the disengaged position XI, the coupling element 24 is spaced apart from the drive 22 located in front of the coupling element 24. As a result, a locking of the coupling element 24 can be avoided.
- the counter-coupling element 25 is designed to be open, so that the coupling element 24 can engage deeply in the counter-coupling element 25 without the counter-coupling element 25 abuts against the counter-coupling element 25 in the direction of movement.
- a toothing of the counter-coupling element 25 with the transmission element 26 is formed radially.
- the toothing of the counter-coupling element 25 is formed around the circumference of the counter-coupling element, which engages in a recess of the transmission element 26. This allows a distance of the coupling element 24 engaged in the Position X are formed to the underlying transmission element 26 large.
- the control unit 56 stops the coupling element 24 as soon as the sensors 53, 54 transmit the signals indicative of the position X, XI to be reached. As a result, the coupling element 24 spaced from the transmission element 26 and the drive 22 to move.
- the counter-coupling element 25 can have a clearance relative to the coupling element 24, as in FIG FIG. 10 shown. This makes it possible that the coupling element 24 engages over a rotation angle range in the counter-coupling element 25. Thus, even if the user already starts to operate the handle 30, the engaged position X can still be achieved.
- the opening 73 is made curved, as in FIG. 10 shown.
- the coupling element 24 is in the disengaged position XI with a distance KG from the counter-coupling element 25, as in FIG. 6 shown.
- the distance KG is used as a measuring path of the second light barrier 54, 45. In this case, a light beam of the second light source 45 in the disengaged position XI reach the second sensor 54.
- the guide means 71 and the groove 72 the counter-coupling element 25 is guided directly on the mounting element 20, so that alignment of the mounting element 20 and the counter-coupling element 25 is achieved to each other.
- the drive 22 and the spindle 23 move the coupling element 24 via a driver 29, as in the Figures 5 and 6 shown.
- the driver 29 has an internal thread for engagement in the spindle 23.
- the Spindle 23 and the coupling element 24 have a game to each other.
- the driver 29 is movably mounted in the coupling element 24 transversely to the direction of movement of the coupling element 24.
- the counter-coupling element 25 and the transmission element 26 are designed separately from one another.
- the counter-coupling element 25 is axially fixed between the carrier 10 and the cover 7, as in the Figures 5 and 6 shown.
- the carrier 10 has a receptacle 63, as in the FIGS. 5 to 8 shown.
- the counter-coupling element 25 is rotatably mounted in the receptacle 63.
- the transmission element 26 and the counter-coupling element 25 have a mutual play, as in FIG. 10 shown.
- the transmission element 26 is mounted axially and radially in the second cover element 7, as in FIG FIG. 5 shown.
- the transmission element 26 it is possible for the transmission element 26 to adapt to the position of a lock without the counter-coupling element 25 varying in alignment with the coupling element 24.
- an end of the transmission element 26 facing away from the counter-coupling element 25 is movable in several spatial directions.
- the second cover 7 has a collar 87, 88, in which the transmission element 26 is mounted like a ball joint.
- the counter-coupling element 25 and the transmission element are connected to each other via a curved toothing, as in FIG. 10 shown. Therefore, the transmission element 26 and the counter-coupling element 25 are in a torque transmission despite the game flat against each other.
- the second cover 7 has an in FIG. 4 shown collar 86, in which the transmission element 26 is mounted ball joint-like.
- the fitting body 2 a spring 40.
- the spring 40 serves to move the handle 30 in the rest position I.
- the spring 40 is connected via a lever 42 indirectly with the handle 30.
- the spring 40 is designed as a compression spring.
- the lever 42 is connected via an extension with the handle 30.
- the extension corresponds to a stop element 43.
- the stop element 43 is part of the monolithic formed mounting element 20, as in FIG. 4 represented, and thus rotatably and reversibly releasably connected to the handle 30.
- the carrier has a first stop 46 and a second stop 47.
- the stops 46, 47 serve to limit a movement of the handle 30 in the mounted state.
- the stop element 43 is in the rest position I on the first stop 46 and in the actuation position on the stop 47.
- the lever 42 is inserted in the stop element 43 and rotatably supported. Another end of the lever 42 is connected via a spring carriage 41 with the spring 40. The lever 42 is in this case rotatably mounted in the spring carriage 41.
- the spring retainer 83 surrounds the spring 40. The spring retainer 83 further acts to guide the spring carriage 41. During compression or decompression of the spring, the lever 42 is guided over the spring carriage 41 on the spring retainer 83, wherein the spring carriage 41 on the spring retainer 83 slides. As a result, a movement of the lever 42 is predetermined.
- the lever 41 is connected to the spring 40 and the stopper member 43 such that during movement from the operating position II to the rest position I, an angle FH between the spring 40 and the lever 41 and an angle HA between the lever 41 and the stopper member 43rd reduce so that the force acting on the handle 30 by the spring 40, the lever 41 and the stopper torque in the rest position I is greater than in the operating position II. In this way, the handle 30 can be particularly effectively held in rest position I. Further, this is overcompensated during the movement of the handle 30 from the operating position II in the rest position I decreasing spring force of the spring 40.
- an inventive coupling method 200 is shown as it is stored in the control unit 56.
- the engagement method is started after an authentication of an authorized user.
- the signals X, XI of the coupling element 24 are continuously indicative of a given frequency Sensors 53, 54 queried.
- the signal of the first sensor 53 is interrogated alternately with the signal of the second sensor 54.
- the frequency may be, for example, between 100 Hz and 10 kHz.
- the time is measured.
- the control unit 56 determines time periods, in particular a time interval, a reduction time and a pause interval.
- a first step 201 it is checked whether the coupling element 24 is in the engaged position X by checking whether the corresponding signals of the sensors 53, 54 are present. If the coupling element 24 is already in the engaged position X, the method 200 is terminated in a method step 202.
- the drive 22 is started in a method step 203, so that the coupling element 24 moves in the direction of the engaged position X. While the drive 22 is running, it is checked continuously in a method step 204 whether the coupling element 24 has reached the engaged position X. If the engaged position X has been reached, the drive 22 is immediately stopped in a method step 205. Subsequent to method step 205, method step 202 takes place in each case.
- a method step 206 it is determined that a time interval ZI has elapsed, wherein the coupling element 24 has not reached the engaged position X.
- the drive 22 is stopped according to method step 207.
- a count i indicating how many times the process step 207 has already been performed in the coupling process 200 is incremented by one.
- a method step 208 it is checked whether the count value i falls below the number AE of engagement processes per clutching method 200 defined in the control unit 56. If this is the case, in a method step 209 a pause interval PI is waited for long. On the other hand has the Count i already reached the number AE, in a method step 210, a disengaging method 300 according to FIG. 12 initiated.
- a method step 211 it is checked in a method step 211 whether the coupling element 24 has already reached the engaged position X. If this is the case, then method step 202 is performed. If this is not the case, then in a method step 212, the drive 22 is again started such that the coupling element 24 moves in the direction of the engaged position X, but directly with a reduced electrical power.
- a method step 214 it is determined that the time interval ZI has elapsed, wherein the coupling element 24 has not reached the engaged position X. In this case, the method step 207 is changed.
- an inventive Auskuppelmaschine 300 is shown as it is stored in the control unit 56.
- the decoupling method 300 is started after a holding period has elapsed.
- the signals X, XI of the coupling element 24 characterizing signals of the sensors 53, 54 are continuously queried with a predetermined frequency.
- the signal of the first sensor 53 is interrogated alternately with the signal of the second sensor 54.
- the frequency may be, for example, between 100 Hz and 10 kHz.
- the time is measured.
- the control unit 56 determines time periods, in particular a time interval ZI, a reduction time RZ and a pause interval PI.
- a first step 301 it is checked whether the coupling element 24 is in the disengaged position XI by checking whether the corresponding signals of the sensors 53, 54 are present. Is the coupling element 24 already in the disengaged position XI, the method 300 is terminated in a method step 302.
- the drive 22 is started in a method step 303 such that the coupling element 24 moves in the direction of the disengaged position XI. While the drive 22 is running, it is checked continuously in a method step 304 whether the coupling element 24 has reached the disengaged position XI. If the disengaged position XI has been reached, the drive 22 is immediately stopped in a method step 305. Subsequent to method step 305, method step 302 takes place.
- a method step 306 it is determined that a time interval ZI has elapsed, wherein the coupling element 24 has not reached the disengaged position XI. In this case, the drive 22 is stopped according to method step 307. A count i indicating how many times the process step 307 has already been performed in the coupling process 300 is incremented by one.
- a method step 308 it is checked whether the count value i falls below a first number AV1 of disengaging processes per disconnection method 300 defined in the control unit 56. If this is the case, a pause interval PI is waited for in a method step 309. If, on the other hand, the count value i has already reached the number AV1, it is checked in a method step 310 whether the count value i falls below a second number AV2 of declutching processes per disconnection method 300 defined in the control unit 56. If this is the case, a pause interval PI is waited for in a method step 311. The pause interval in method step 311 differs from the pause interval in method step 309 and is in particular longer. Subsequent to the method step 309 or 311, a change is made to method step 301.
- the disengaging method 300 is aborted and, in a method step 313, an error is optically signaled. Thereafter, in a method step 314, the disengaging method 300 is ended.
- the time intervals ZI in the method steps 206, 214 and 306 and the pause intervals PI in the method steps 209, 309 and 311 can be chosen to be of different lengths.
- the pause interval PI in the method step 209 is smaller than the pause interval in the method step 309.
- the pause interval PI in the method step 309 may be smaller than the pause interval in the method step 311.
- the time interval ZI in the method step 206 may be greater than in the method steps 309 and 311.
- further fixed numbers may be provided in order to be able to further vary the pause intervals.
- the access control system according to the invention is designed as a lock cylinder 2002 and as an exploded view in Fig. 13 shown.
- the combination of the individual structural components to the lock cylinder 2002 according to the invention is described in the following figures.
- the lock cylinder 2002 comprises three components: a rotary knob 2001, a cylinder adapter 2003 and an inner knob 2004.
- the cylinder adapter 2003 can be actuated both via the rotary knob 2001 and via the inner knob 2004, so that in particular a door equipped with the lock cylinder 2002 can be released. It is inventively provided that the cylinder adapter 2003 via the inner knob 2004 is always controlled, while the knob 2001 is uncoupled from a dome unit 2065 of the cylinder adapter 2003, so that the knob 2001 is freely rotatable.
- the structure of the dome unit 2065 is in Fig. 14 shown.
- Fig. 14 shows an exploded view of the dome unit 2065.
- the dome unit 2065 includes a drive pocket 2014, in which a drive 2015 is added.
- the 2015 drive is with a threaded spindle 2017 connected, so that the threaded spindle 2017 of the drive 2015 is rotatable.
- a driver 2018 is arranged, so that by a rotation of the threaded spindle 2017 by the drive 2015, the driver 2018 is axially displaced on the threaded spindle 2017, when the driver 2018 is held rotationally fixed.
- For rotationally fixed holding the driver 2018 is arranged in a first coupling slide recess 2027 of a coupling slide 2016.
- the coupling slide 2016 is again, as in Fig.
- the coupling slider 2016 is movable by the drive 2015, in that a rotation of the drive 2015 causes a rotation of the threaded spindle 2017, whereby the driver 2018 is displaced on the threaded spindle 2017, due to the arrangement of the driver 2018 in the first coupling slide recess 2027 affects the coupling slide 2016.
- the coupling slide 2016 is parallel to a shaft of the drive 2015 and thus movable parallel to the threaded spindle 2017.
- the coupling slide 2016 has an engagement element 2029.
- the function of the engagement member 2029 will be described with reference to Fig. 21 described.
- the coupling slide 2016 may advantageously have a second coupling slide recess 2028, whereby the coupling slide 2016 has a very low weight.
- the coupling slide 2016 is easy and quick to accelerate, so short shift times are guaranteed.
- the drive 2015 is arranged inside the drive bag 2014. It is also provided that a cable for supplying the drive 2015 with electrical energy in a cable channel (not shown) of the motor bag 2014 is performed.
- the cable of the drive 2015 is threaded under the drive 2015 or laterally of the drive pocket 2014 and terminates in a drive connector 2019.
- the motor pocket 2014 has a drive connector holder 2026.
- Drive connector holder 2026 the drive connector 2019 is arranged, in particular inserted from below, wherein the drive connector 2019 is formed as a drive connector and connected to the cable.
- the drive 2015 via the drive connector 2019 is electrically contacted and thus controlled.
- the drive connector 2019 is seated with play within the drive connector holder 2026 of the motor pocket 2014.
- the electrical contacting of the drive connector 2019 is in the Fig. 17 and 18 shown.
- Fig. 15 shows the drive 2015 with the threaded spindle 2017.
- the drive 2015 is preferably a DC motor and advantageously has a diameter of 6 mm.
- the threaded spindle 2017 is mounted on a shaft of the drive 2015, wherein a distance 2200 between a housing of the drive 2015 and the threaded spindle 2017 is advantageously 0.3 mm to 0.5 mm.
- the threaded spindle 2017 is in particular an M2 threaded spindle.
- the dome unit 2065 can be inserted into the main body 2005 of the rotary knob 2001.
- the main body 2005 which is preferably made of metal, has a first holder 2021 and a second holder 2022.
- the first holder 2021 serves to receive the drive pocket 2014
- the second holder 2022 serves to receive the coupling slide 2016.
- the drive pocket 2014 also has a drive stop 2025, which rests on the base body 2005 after the insertion of the drive pocket 2014 into the first holder 2021.
- clip lugs 2024 of the drive pocket 2014 surround the first holder 2021 in this position, so that a positive connection between the first holder 2021 of the main body 2005 and the drive pocket 2014 of the dome unit 2065 is present.
- the dome unit 2065 is firmly and securely locked in the body 2005.
- the coupling slider 2016 is disposed within the second bracket 2022.
- the coupling slider 2016 longitudinally displaceable, ie parallel to a longitudinal axis 2100 of the base body 2005.
- the longitudinal axis 2100 is arranged parallel to the shaft of the drive 2015.
- Other movements of the coupling slide 2016, in particular a rotation of the coupling slide 2016, are prevented by the second holder 2022.
- the main body 2005 has in particular a diameter of 40 mm.
- the main body 2005 is advantageously formed as a hollow cylinder, wherein the cylindrical base body 2005 has a lateral surface 2020.
- the second holder 2022 is mounted, wherein the first holder 2021 is arranged radially inwardly relative to the second holder 2022.
- the main body 2005 also has a battery recess 2023, which is formed by a first jacket opening 2054.
- the functionality of the battery recess 2023 will be described with reference to FIG Fig. 25 explained.
- the first holder 2021 and / or the second holder 2022 may be formed as an axial passage opening of the main body 2005.
- both the first holder 2021 and the second holder 2022 are not passage openings.
- the first holder 2021 and the second holder 2022 are axially accessible only from one side. From the axially opposite side reaching the first holder 2021 and / or the second holder 2022 is thus not possible. It is provided in particular that this page is the side facing away from the cylinder adapter 2003. Thus, a manipulation of the dome unit 2065 and thus of the knob 2001 can be prevented.
- the Fig. 17 and 18 show a board 2010, which is arranged within the knob 2001. It is provided that a first board part 2057 of a first end face 2051 of the base body 2005 (see. Fig. 19 ) to the Main body 2005 is fixed, while a second board part 2061 of a second end face 2052 (see. Fig. 7 ) of the base body 2005 is attached to the main body 2005. Between the first board part 2057 and the second board part 2061, a connecting part 2066 is arranged.
- the connecting part 2066 is used for the mechanical and electrical connection of the first board part 2057 with the second board part 2061.
- the connecting part 2066 is formed completely flexible in this embodiment. Alternatively, the connecting part 2066 may alternatively have a rigid portion.
- the first board part 2057 and / or the second board part 2061 are preferably rigid.
- the first board part 2057 comprises a drive and / or a regulation of the drive 2015. Therefore, the first board part 2057 has a drive mating connector 2056, which is designed as a contact socket and is electrically connectable to the drive connector 2019. If the first board part 2057 is fastened to the main body 2005, it is provided that a contacting of the drive connector 2019 and the counter drive connector 2056 inevitably takes place. To achieve this, the first board part 2057 has a recess 2058 and a central bore 2067. The recess 2058 is used to pass the first holder 2021 and the second holder 2022 of the base body 2005 through the first board part 2057. At the same time, the first board part 2057 is held rotationally fixed within the base body 2005.
- the central bore 2067 By means of the central bore 2067, it is ensured that the first board part 2057 is arranged centrally in the main body 2005 by a positioning dome 2068 of the main body 2005 (cf. Fig. 19 ) is guided through the central bore 2067 of the first board part 2057.
- the first board part 2057 has a battery mating connector 2041 which can be contacted by a battery compartment 2008 (cf. Fig. 25 ).
- the first board part 2057 comprises all electrical components that are necessary for operating and activating the drive 2015.
- the second board part 2061 has all the electrical components that are needed for wireless data transmission.
- the second board part 2061 can wirelessly communicate with code cards, which indicate whether or not there is an authorization to operate the cylinder adapter 2003.
- the receipt of such authorization by the second board part 2061 can be transmitted to the first board part 2057, so that the first board part 2057 controls the coupling unit 2065, in particular the drive 2015, in such a way that the rotary knob 2001 is coupled to the cylinder adapter 2003 , This is done by moving the coupling slide 2016.
- the first board part 2057 also has a first sensor 2069 and a second sensor 2070, wherein the first sensor 2069 and the second sensor 2070 are arranged on different sides of the first board part 2057.
- the first sensor 2069 and / or the second sensor 2070 are a light barrier.
- the light barrier can be interrupted by a web 2071 of the coupling slide 2016, wherein, depending on the position of the coupling slide 2016, the light barrier of the first sensor 2069 or the light barrier of the second sensor 2070 is interrupted.
- it can be determined where the web 2071 and thus the coupling slide 2016 is located.
- it can be distinguished in this way, whether the coupling slide 2016 is in a coupled position or in a disengaged position. A difference between the coupled position and the disengaged position will be explained with reference to FIGS Fig. 20 and 21 explained.
- Fig. 7 shows the main body 2005 of the rotary knob 2001 with inserted board 2010.
- the connecting part 2066 is guided in a recess 2064 of the base body 2005.
- the first board part 2057 is held in the base body 2005 via a retaining ring 2013.
- the attachment of the retaining ring 2013 with reference to Fig. 21 explained.
- two fastening means 2072 are provided, which engage through openings of the second board part 2061.
- the fastening means 2072 are in particular screws, preferably M2x4 pan head screws.
- the Fig. 12 to 23 describe the connection of the body 2005 with a raster shaft 2011.
- Fig. 20 shows the raster shaft 2011 and a coupling shaft 2012.
- the raster shaft 2011 includes a sleeve-shaped portion having on its outer side a plurality of circumferential grooves 2053. About the circumferential grooves 2053, the raster shaft 2011 within the cylinder adapter 2003 can be fastened. The interior of the sleeve-shaped portion forms a recess 2059 for the coupling shaft 2012.
- the coupling shaft 2012 is disposed within the raster shaft 2011.
- the coupling shaft 2012 is on one side by the Positionierdom 2068 of the base body 2005 (see. Fig. 19 ) and axially fixed on the other side by a stop 2084 which bears against a flange 2034 of the raster shaft 2011.
- the flange 2034 also has magnet recesses 2073 in which magnets 2060, in particular neodymium magnets, can be used, in particular adhesively bonded.
- the magnets 2060 are preferably flush with the flange 2034.
- magnets 2060 are arranged on the coupling shaft 2012, in particular on a flange of the coupling shaft 2012, in particular in Flanschausappelungen the coupling shaft 2012.
- the magnets 2060 are glued into the coupling shaft 2012. It can be prevented with the magnets that the driver 2018, in particular the engagement element 2029, collides with the coupling shaft 2012.
- the coupling shaft 2012 has at least one coupling nose 2074.
- a coupling shaft 2012 with two coupling lugs 2074 is shown.
- the coupling shaft 2012 can be coupled to a rotation of the base body 2005 or separated from a rotation of the base body 2005. If the coupling slide 2016 is in a coupled-in position, ie in a position in which the driver 2018 on the threaded spindle 2017 has a maximum distance from the drive 2015, torque is transmitted from the main body 2005 via the coupling slide 2016 to the coupling nose 2074 and thus transferable to the coupling shaft 2012.
- the magnets 2060 prevent the coupling slider 2016, in particular the engagement member 2029, from colliding with the coupling tabs 2074 by preventing the coupling shaft 2012 from remaining in a position where the coupling tabs 2012 are prevented from repelling the magnets 2060 of the coupling shaft 2012 and the raster shaft 2011 2074 are arranged immediately in front of the coupling slide 2016. Thus, said collision between coupling slider 2016 and coupling lugs 2074 is avoidable.
- the magnets 2060 are advantageously disc magnets with a dimension of 4x1 mm or 3x1.5 mm.
- the coupling shaft 2012 is also hollow in particular and has an inner profile with which an adapter shaft 2046 (see. Fig. 29 ) of the cylinder adapter 2003 is movable. To cover the coupling shaft 2012 toward the rotary knob 2001, it is provided that a wave washer 2075 is pressed into the hollow coupling shaft 2012. In particular, the positioning mandrel 2068 abuts the wave washer 2075 to axially fix the coupling shaft 2012.
- Fig. 21 shows a combination Fig. 19 and Fig. 20 , Thus shows Fig. 21 how the raster shaft 2011 and the coupling shaft 2012 with the body 2005 are connectable.
- the flange 2034 of the raster shaft 2011 has an alignment recess 2033, while the base body 2005 has an alignment nose 2032. If the raster shaft 2011 is connected to the main body 2005, then the alignment nose 2032 engages in the alignment recess 2033. Thus, only one alignment of the base body 2005 to the raster shaft 2011 is possible for connecting the raster shaft 2011 and base body 2005.
- the Ausrichtnase 2032 also serves to align the coupling shaft 2012, in particular the recess 2079 and the magnets 2060 of the coupling shaft 2012. Out Fig. 21 It can also be seen that the flange 2034 of the raster shaft 2011 covers the first end face 2051 of the main body 2005.
- Fig. 22 shows the base body 2005 with inserted raster shaft 2011.
- the raster shaft 2011, in particular the flange 2034 of the raster shaft 2011, is positively connected to the base body 2005.
- a flange 2076 is provided, via which the flange 2034 of the raster shaft 2011 is held on the base body 2005.
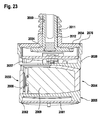
- Fig. 23 shows a sectional view of Fig. 22 , It can be seen that the flange 2034 of the raster shaft 2011 is applied directly to the retaining ring 2013. Thus, a holder of the first board member 2057, in particular in the axial direction, guaranteed. The flange 2034 in turn is held by the flange 2076 on the base body 2005.
- the second board part 2061 is arranged in a shoulder 2062 of the main body 2005. This allows the second board portion 2061, as well as the first board portion 2057, to be populated from both sides of the board surface. Thus, a maximum surface is available for equipping with electrical components.
- Fig. 24 shows a retractable battery compartment 2008 for the knob 2001.
- a battery 2009 in particular a Tekcell CR2 lithium battery
- the battery 2009 of battery 2039 contacts the battery compartment 2008 is contacted.
- a cable of the battery compartment 2008 is soldered directly to the battery 2009.
- a contact of the battery 2009 takes place exclusively on the battery compartment 2008.
- the battery compartment 2008 in turn has a battery connector 2040, which is arranged on the battery compartment 2008, in particular with play, and projects through a lateral opening of the battery recess 2023 when the battery compartment 2008 is inserted into the battery recess 2023.
- the battery connector 2040 is connected to the battery contacts 2039 or to the cable soldered to the battery 2009, so that electrical connection of the board 2010 via the battery connector 2040 takes place. How about the Fig. 17 and 18 has been described, the first board portion 2057 a battery mating connector 2041 which contacts the battery connector 2040 when the battery case 2008 is inserted into the body 2005 of the rotary knob 2001.
- the battery mating connector 2041 is particularly arranged directly on the first board part 2057.
- the battery connector 2040 is formed as a contact socket, wherein the battery mating connector 2041 is formed as a plug.
- the battery connector 2040 is a plug and the battery mating connector 2041 is a contact socket.
- the base body 2005 has the battery recess 2023 extending from a first shell opening 2054 to a second shell opening 2055 (cf. Fig. 23 ) and rotationally asymmetric.
- the battery recess 2023 is oriented perpendicular to the first shell opening 2054 and the second shell opening 2055. This allows the insertion of the battery compartment 2008 through the first shell opening 2054 into the battery recess 2023, as in FIG Fig. 25 shown.
- the alignment of the battery compartment 2008 in the battery recess 2023 in the insertion direction is predetermined by the rotationally asymmetrical configuration of the battery recess 2023.
- the insertion of the battery compartment 2008 into the battery recess 2023 is simplified.
- a force can be applied to the battery compartment 2008 through the second casing opening 2055 so that the battery compartment 2008 can be removed from the battery recess 2023 through the first casing opening 2054.
- the second shell opening 2055 may be replaced by a spring-loaded latching mechanism.
- the lateral surface 2020 of the base body 2005 has only the first shell opening 2054, through which the battery compartment 2008 can be inserted into the battery recess 2023. Subsequently, the battery compartment 2008 is spring-loaded latched within the battery recess 2023, so that by releasing the latch, the spring load can be used to remove the battery compartment 2008 from the battery recess 2023 again.
- the insertion of the battery compartment 2008 into the battery recess 2023 is limited by a battery stop 2042.
- the battery stop 2042 abuts against a base body stop 2043 when the battery compartment 2008 is fully inserted in the battery recess 2023.
- the battery connector 2040 is contacted by the battery mating connector 2041.
- Fig. 25 It is shown that the base body 2005 is surrounded by a cover element 2006.
- the cover element 2006 together with the base body 2005 is also in Fig. 26 shown.
- the covering element 2006 surrounds the lateral surface 2020 of the base body 2005, wherein at least one circumferential opening 2030 of the covering element 2006 allows access to the first shell opening 2054 and / or to the second shell opening 2055 of the base body 2005.
- the covering element 2006 is in particular designed such that the first shell opening 2054 and / or the second shell opening 2055 of the base body 2005 are covered by the covering element 2006 by rotation of the covering element 2006 relative to the base body 2005, ie the peripheral openings 2030 of the covering element 2006 and the first jacket opening 2054 and / or the second shell opening 2055 of the base body 2005 are no longer aligned.
- the cover member 2006 further serves to cover the flange 2076, so that the connection between the screen shaft 2011 and the base body 2005 is completely covered by the cover member 2006.
- the raster shaft 2011 is guided through an end opening 2031 of the cover element 2006.
- the cover member 2006 may have a rib in the axial direction, which engages in a corresponding recess, in particular groove. In this way, a radial fixation is realized.
- the battery compartment 2008 arranged in the battery recess 2023 can be concealed in a particularly advantageous manner by a knob cap 2007, as shown in FIG Fig. 27 is shown.
- the battery recess 2023 is always released by the end openings 2030 of the cover member 2006 and is covered only by the knob cap 2007.
- the knob cap 2007 has a connecting element 2038, which is designed in particular as a latching lug. With the connecting element 2038, the knob cap 2007 on the body 2005 can be fastened.
- the locking element formed as a connecting element 2038 engages in the battery recess 2023 and the knob cap 2007 thus form-fitting manner with the body 2005 connects.
- the knob cap 2007 is disposed below the cover member 2006, that is arranged closer to the lateral surface 2020 of the base body 2005 than the cover member 2006. About a peripheral seal 2035, the peripheral openings 2030 of the cover 2006 are closed. Overall, therefore, the cover 2006 and the knob cap 2007 together allow a complete and secure coverage of the lateral surface 2020 of the body 2005.
- the knob cap 2007 also has a light ring 2036, which is arranged in a cover 2077.
- the light ring 2036 is glued into the knob cap 2007.
- the luminous ring 2036 can be clipped into the knob cap 2007.
- the cover 2077 covers the second Face 2052 of the body 2005 from.
- the cover 2077 can be used in particular in an end-side opening of the knob cap 207.
- a logo aperture 2078 is adhered.
- the log diaphragm 2078 therefore gives the knob cap 2007 and thus the rotary knob 2001 a visually high-quality impression, whereby the light ring 2036 around the logo panel 2078 is still visible.
- the light ring can be controlled in particular by the second board part 2061.
- an RFID antenna is arranged, which is electrically connected to the second board part 2061.
- a radio antenna in particular an 868 MHz antenna, is also arranged. This is used for communication with other components, in particular for the configuration of the rotary knob 2001.
- Fig. 28 shows the knob 2001 with the Fig. 27 Knob cap 2007 shown above.
- the mounting elements 2037 are advantageously threaded pins with pins, which can be guided by the cover element 2006 and the knob cap 2007 and can be screwed inside the base body 2005.
- Fig. 29 shows the cylinder adapter 2003 in an exploded view.
- the cylinder adapter 2003 comprises a closing element 2045 with which a closing mechanism, for example a door, can be actuated.
- the cylinder adapter 2003 further has adapter shafts 2046 which are connected to the closing element 2045. If one of the adapter shafts 2046 is rotated, the closing element 2045 is also rotated, so that the closing mechanism of the door can be actuated by a rotation of the adapter shafts 2046.
- a double cylinder is shown, ie the cylinder adapter 2003 can be actuated from two sides. According to the invention, it is also possible to use a half cylinder, in which case the inner knob 2004 shown in FIG. 2018 is not required.
- the adapter shaft 2046 is secured by a shaft lock 2049 within the cylinder adapter 2003.
- the adapter shaft 2046 has an outer profile that matches the inner profile of the coupling shaft 2012.
- torque from the clutch shaft 2012 is transferable to the adapter shaft 2046.
- said profiles are hexagonal profiles.
- the knob 2001 is stored and held within the cylinder adapter 2003.
- locking elements 2047 are particularly provided.
- the locking elements 2047 are arranged in clip sleeves 2050 and are spring-loaded by a spring 2048 in the circumferential grooves 2053 of the raster shaft 2011 pressed.
- the circumferential grooves 2053 of the raster shaft 2011 have chamfers, so that a sawtooth profile is present on the outside of the raster shaft 2011. In this way, the rotary knob 2001 can be easily inserted into the cylinder adapter 2003.
- the locking element 2047 has to be pulled out of the circumferential groove 2053, which causes a partial removal of the cylinder adapter 2003 from the door leaf.
- a manipulation of the lock cylinder 2002 according to the invention is excluded or at least difficult.
- the rotary knob 2001 is telescopic, i. H. the rotary knob 2001 can be used for cylinder adapter 2003 with different lengths. Due to the adjustability of the rotary knob 2001, the knob can be adapted to different door thicknesses.
- the lock cylinder 2002 additionally has an inner knob 2004, which in Fig. 30 is shown.
- the inner knob 2004 has an inner knob body 2080, which via a shaft-hub connection 2081, in particular by a Scheibfeder für, with an inner shaft 2082 is connected.
- the inner shaft 2082 has, analogous to the coupling shaft 2012, an inner profile, which coincides with the outer profile of the adapter shafts 2046.
- the inner shaft 2082 analogous to the raster shaft 2011, circumferential grooves on the outer surface.
- the inner knob 2004 in the same way to the cylinder adapter 2003 can be attached as the knob 2001.
- the inner knob 2004 always allows the actuation of the cylinder adapter 2003, ie the rotation of the closing element 2045th
- Fig. 31 shows the final composition of the lock cylinder 2002.
- a rotary knob 2001 and an inner knob 2004 are used for the operation of the cylinder adapter 2003.
- the invention also provides that for operating the cylinder adapter 2003 two rotary knob 2001 can be used.
- a spacer 2083 is provided in order to maintain a distance between the knob 2001 and the cylinder adapter 2003. The attachment of the raster shaft 2011 of the rotary knob 2001 within the cylinder adapter 2003 is then as described with reference to FIG. 297.
Landscapes
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Lock And Its Accessories (AREA)
Abstract
Description
- Die Erfindung betrifft ein elektromechanisches Zugangskontrollsystem für eine Gebäudetür. Das Zugangskontrollsystem weist ein Kupplungselement und ein Gegenkupplungselement auf. Das Kupplungselement befindet sich in einer eingekuppelten Position in Wirkverbindung mit dem Gegenkupplungselement und in einer ausgekuppelten Position außer Wirkverbindung mit dem Gegenkupplungselement. Das Zugangskontrollsystem weist einen Antrieb, insbesondere eine elektrischen Motor auf, der das Kupplungselement zwischen der eingekuppelten Position und der ausgekuppelten Position bewegt, gemäß dem Oberbegriff des Patentanspruchs 1. Ferner betrifft die Erfindung ein Verfahren gemäß dem unabhängigen Patentanspruch 5.
- Zugangskontrollsysteme mit einem Kupplungselement, das, durch einen Motor bewegt, in Wirkverbindung mit einem Gegenkupplungselement gebracht werden kann, sind bekannt. Hierdurch kann z. B. eine Wirkverbindung zu einem Schloss hergestellt werden. Bei einem Einkupplungsvorgang, bei dem versucht wird, das Kupplungselement in die eingekuppelte Position zu bewegen, kann es zu einer fehlerhaften geometrischen Lage, bei der das Kupplungselement nicht in das Gegenkupplungselement eingreifen kann, kommen. In diesem Fall nimmt das Kupplungselement eine Zwischenposition, die zwischen der eingekuppelten und der ausgekuppelten Position liegt, ein. Um dennoch in die eingekuppelte Position zu gelangen, wird ein Federelement beaufschlagt. Das Federelement kann das Kupplungselement bei einer Änderung der geometrischen Lage, die eine Bewegung in die eingekuppelte Position ermöglicht, in die eingekuppelte Position bewegen.
- Ferner sind Zugangskontrollsysteme bekannt, bei denen der Motor beim Einkuppeln das Kupplungselement jedes Mal gegen ein Federelement bewegt. Nachteilig ist, dass der Motor gegen das Federelement arbeiten muss. Hierbei wird viel elektrische Energie verbraucht.
- Der Erfindung liegt die Aufgabe zugrunde, ein elektromechanisches Zugangskontrollsystem und ein Verfahren zur Steuerung und/oder Regelung eines Antriebs zur Verfügung zu stellen, die den vorgenannte Nachteil zumindest teilweise beseitigen, insbesondere Zugangskontrollsystem und ein Verfahren bereitzustellen, die energiesparend arbeiten.
- Die Aufgabe wird gelöst durch den unabhängigen Anspruch 1. Vorteilhafte Weiterbildungen des Zugangskontrollsystems sind in den abhängigen Vorrichtungsansprüchen, der Beschreibung und in den Figuren angegeben. Die Aufgabe wird weiterhin durch ein Verfahren gemäß dem unabhängigen Anspruch 5 gelöst. Vorteilhafte Weiterbildungen des Verfahrens sind in den abhängigen Verfahrensansprüchen, der Beschreibung und in den Figuren angegeben. Merkmale und Details, die in Zusammenhang mit dem erfindungsgemäßen Zugangskontrollsystem beschrieben sind, gelten dabei auch in Zusammenhang mit dem erfindungsgemäßen Verfahren und umgekehrt. Dabei können die in der Beschreibung und in den Ansprüchen erwähnten Merkmale jeweils einzeln für sich oder in Kombination erfindungswesentlich sein. Insbesondere ist ein Verfahren, das mit einem Zugangskontrollsystem nach einem der Ansprüche 1 bis 4 durchführbar ist, und ein Zugangskontrollsystem, auf dem ein Verfahren nach einem der Ansprüche 5 bis 15 durchführbar ist, unter Schutz gestellt.
- Erfindungsgemäß ist vorgesehen, dass das Zugangskontrollsystem zumindest einen Sensor zur Kennzeichnung zumindest einer Position des Kupplungselementes und eine Kontrolleinheit aufweist, die den Antrieb in Abhängigkeit von einem an die Kontrolleinheit übermittelten Signal des Sensors steuert und/oder regelt.
- Durch den zumindest einen Sensor kann eine Position des Kupplungselementes erfasst werden. Hierzu übermittelt der Sensor ein Signal an die Kontrolleinheit, das für die Position des Kupplungselementes kennzeichnend ist. Die Kontrolleinheit nutzt die von dem Sensor erhaltene Information über die Position des Kupplungselementes, um den Antrieb zu steuern und/oder zu regeln. Dadurch, dass in dem erfindungsgemäßen Zugangskontrollsystem eine derartige Kooperation zwischen dem Sensor und der Kontrolleinheit vorhanden ist, kann die Kontrolleinheit anhand der Position des Kupplungselementes entscheiden, wie der Motor zu steuern und/oder zu regeln ist. Damit ist eine gewisse Intelligenz geschaffen worden, die es ermöglicht, zu kontrollieren, ob ein Ein- oder Auskupplungsvorgang zu der zu erreichenden Position des Kupplungselementes geführt hat und die weitere Steuerung und/oder Regelung des Antriebs darauf abzustimmen. Somit kann auf ein Federelement verzichtet werden. Hierdurch kann elektrische Energie gespart werden.
- Insbesondere kann ein Energiesspeicher, insbesondere eine Batterie oder einen Akkumulator, elektrische Leistung für den Antrieb zur Verfügung stellen. Durch den Verzicht auf ein Federelement können die Energiespeicherstandzeiten erhöht werden. Der Antrieb kann als ein Elektromotor, insbesondere als ein Glockenankermotor, ausgestaltet sein.
- Durch den Sensor kann die eingekuppelte und/oder die ausgekuppelte Position gekennzeichnet sein. Bevorzugt werden sowohl die eingekuppelte als auch die ausgekuppelte Position durch den Sensor gekennzeichnet. Der Sensor übermittelt insbesondere für die eingekuppelten und die ausgekuppelte Position unterschiedliche Signale an die Kontrolleinheit. Beispielsweise kann das Kupplungselement in der ausgekuppelten Position auf den Sensor wirken. Entsprechend wirkt das Kupplungselement in der eingekuppelten Position nicht oder nicht genügend auf den Sensor. Somit übermittelt in der ausgekuppelten Position der Sensor ein Signal, das eine Wirkung des Kupplungselements signalisiert, an die Kontrolleinheit, während in der eingekuppelten Position der Sensor ein Signal, das eine fehlende oder ungenügende Wirkung des Kupplungselements signalisiert, an die Kontrolleinheit übermittelt. Alternativ kann die Wirkung in der eingekuppelten Position, nicht jedoch in der ausgekuppelten Position eintreten und entsprechende Signale übermittelt werden.
- Ein Versuch, das Kupplungselement in die eingekuppelte Position zu bewegen, wird im Folgenden als Einkupplungsvorgang bezeichnet. Ein Versuch, das Kupplungselement in die ausgekuppelte Position zu bewegen, wird im Folgenden als Auskupplungsvorgang bezeichnet. Einkupplungsvorgang und Auskupplungsvorgang werden zusammen als Kupplungsvorgang bezeichnet.
- Die Begriffe "vor", "hinter", "oberhalb" etc. werden derart gebraucht, wie es einem eingebauten Zustand aus Sicht eines Betrachters entspricht.
- Bevorzugt bewegt der Antrieb das Kupplungselement linear. Insbesondere wird bei dem Einkupplungsvorgang das Kupplungselement von dem Antrieb wegbewegt und/oder bei einem Auskupplungsvorgang auf den Antrieb zubewegt. Eine Antriebsanordnung, durch die das Kupplungselement bewegt wird, kann neben dem Antrieb eine Spindel oder eine Schnecke aufweisen.
- In der eingekuppelten Position befindet sich das Kupplungselement in Wirkverbindung mit dem Gegenkupplungselement. Hierunter werden insbesondere die Positionen verstanden, in denen das Kupplungselement form- und/oder kraftschlüssig mit dem Gegenkupplungselement verbunden ist oder das Kupplungselement form- und/oder kraftschlüssig durch eine Betätigung des Zugangskontrollsystems durch einen Benutzer mit dem Gegenkupplungselement verbindbar ist. In Wirkverbindung ist insbesondere eine Kraft oder ein Drehmoment von dem Kupplungselement auf das Gegenkupplungselement übertragbar.
- Befindet sich das Kupplungselement in der eingekuppelten Position, so kann das Zugangskontrollsystem dazu dienen, durch eine Betätigung eines Benutzers eine Wirkung für die Gebäudetür zu verursachen. Befindet sich hingegen das Kupplungselement in der ausgekuppelten Position, so entfacht eine Betätigung eines Benutzers keine Wirkung für eine Gebäudetür. Das Zugangskontrollsystem kann unmittelbar oder mittelbar durch den Benutzer betätigt werden.
- Beispielsweise kann das Zugangskontrollsystem als ein Beschlag, als ein Beschlagskörper, als ein Drehknauf oder als ein Schließzylinder ausgestaltet sein. Die Wirkung für die Gebäudetür kann in einer Bewegung einer Falle und/oder eines Riegels, die durch die eingekuppelte Position ermöglicht wird, liegen.
- Insbesondere kann vorgesehen sein, dass der Benutzer ein Betätigungselement, z. B. eine Handhabe, insbesondere einen Türdrücker, eines Beschlags, einen Drehknauf oder einen Schlüssel betätigt. Das hierdurch erzeugte Drehmoment ist auf das Kupplungselement übertragbar. Befindet sich das Kupplungselement in der eingekuppelten Position, so wird das Drehmoment auf das Gegenkupplungselement übertragen. Das Gegenkupplungselement dient dazu, eine Wirkverbindung mit der Falle und/oder dem Riegel herzustellen, so dass das durch den Benutzer erzeugte Drehmoment auf die Falle und/oder den Riegel übertragbar ist. Befindet sich das Kupplungselement dagegen in der ausgekuppelten Position, so wird das Drehmoment nicht auf Gegenkupplungselement übertragen, so dass die Falle und/oder der Riegel nicht bewegbar sind. Das Betätigungselement kann Teil des Zugangskontrollsystems oder mit dem Zugangskontrollsystem verbindbar sein. Ebenso kann die Falle und/oder der Riegel Teil des Zugangskontrollsystems oder mit dem Zugangskontrollsystem zumindest mittelbar verbindbar sein. Das Gegenkupplungselement und das Übertragungselement können derart miteinander, z. B. form- und/oder kraftschlüssig, verbunden sein, dass sich das Übertragungselement mit dem Gegenkupplungselement mitdreht.
- Insbesondere wird das Kupplungselement nur nach einer Authentifizierung eines berechtigten Benutzers in die eingekuppelte Position bewegt. Hierbei wird ein Authentifzierungs-Code insbesondere kabellos mit Hilfe einer Sende- und/oder Empfangseinheit empfangen.
- Beispielsweise kann das Zugangskontrollsystem als ein Beschlagskörper ausgeführt sein. Der Beschlagskörper kann zur Anordnung, insbesondere Anlage, an eine Gebäudetür dienen. Der Beschlagskörper ist außerhalb einer Schlosskastens eines Schlosses, das den Riegel und/oder die Falle aufweist, anordbar. Der Beschlagskörper kann insbesondere als Türschild oder als Rosette ausgebildet sein. Der Beschlagskörper kann mit der Handhabe verbindbar sein. Der Beschlagskörper kann zur Lagerung der Handhabe dienen. Der Beschlagskörper kann mit einem Übertragungselement verbindbar sein. Das Übertragungselement dient dazu, ein Drehmoment von der Handhabe auf ein Schloss zu übertragen. Hierzu kann das Übertragungselement von der Rückseite des Beschlagskörpers hervorragen. Das Übertragungselement kann z. B. in das Schloss, insbesondere in eine Nuss des Schlosses, einsteckbar sein. Zusätzlich oder alternativ kann der Beschlagskörper mindestens eine Aufnahme zur Aufnahme eines Befestigungselementes, das zur Befestigung an der Gebäudetür dient, aufweisen.
- Das Zugangskontrollsystem kann als ein Beschlag ausgebildet sein. Der Beschlag weist neben dem Beschlagskörper die Handhabe auf. Der Beschlag kann das Übertragungselement aufweisen oder mit dem Übertragungselement verbindbar sein.
- Alternativ kann das Zugangskontrollsystem als Drehknauf ausgebildet sein. Der Drehknauf ist mit einem Zylinderadapter verbunden oder verbindbar, wodurch ein Türschluss realisiert ist. Ebenso wie der Beschlag kann der Drehknauf ein Drehmoment auf den Zylinderadapter übertragen, wodurch eine Gebäudetür verriegelt oder entriegelt oder eine Falle betätigt werden kann. Wiederum sind Kupplungselement und Gegenkupplungselement vorhanden, so dass der Drehknauf in einen eingekuppelten Zustand oder in einen ausgekuppelten Zustand gebracht werden kann, so dass eine Zugangskontrolle ermöglicht wird, indem nur beim Zugangsberechtigten der Drehknauf in einem eingekoppelten Zustand überführt wird, so dass nur für den Zugangsberechtigten die Gebäudetür entriegelbar ist.
- Der Drehknauf weist insbesondere einen zylinderförmigen Grundkörper auf, das mittels der Rasterwelle in einem Zylinderadapter der Gebäudetür befestigbar ist. Die Rasterwelle weist bevorzugt einen Flansch auf, der eine Stirnfläche des zylinderförmigen Grundkörpers überdeckt. Eine Kupplungswelle ist dabei innerhalb der hohlen Rasterwelle aus dem Drehknauf herausgeführt und mit dem Zylinderadapter wirkverbunden. Um den Drehknauf einzukuppeln, muss der Grundkörper mit der Kupplungswelle wirkverbunden werden. Somit ist das Kupplungselement vorteilhafterweise an dem Grundkörper des Drehknaufs befestigt, so dass eine Rotation des Drehknaufs über Kupplungselement und Gegenkupplungselement, d.h. Kupplungswelle, auf den Zylinderadapter übertragbar ist. Dies bedeutet, dass in einem ausgekuppelten Zustand der gesamte Drehknauf mit Ausnahme der Kupplungswelle frei rotierbar ist, während im eingekuppelten Zustand der gesamte Drehknauf incl. der Kupplungswelle rotierbar ist.
- Der Drehknauf weist besonders bevorzugt ein Gegenkupplungselement auf, das die Form einer Kupplungswelle hat. Die Kupplungswelle hat insbesondere einen Flansch, wobei der Flansch zumindest eine Kupplungsnase aufweist. Der Flansch der Kupplungswelle sowie die Kupplungsnase liegen dabei an dem Flansch der Rasterwelle an. Die Kupplungsnase dient als Gegenelement für das Kupplungselement, indem das Kupplungselement in Wirkverbindung mit der Kupplungsnase gebracht werden kann. Somit befindet sich hinter der Kupplungsnase der Flansch der Rasterwelle, wobei die Positionsangabe "hinter" bedeutet, dass der Flansch der Rasterwelle näher an der Gebäudetür angeordnet ist. Um zu verhindern, dass das Kupplungselement mit dem Flansch der Rasterwelle kollidiert und um gleichzeitig zu ermöglichen, dass eine sichere Wirkverbindung zwischen Kupplungselement und Kupplungsnase vorhanden ist, weist der Flansch der Rasterwelle eine Ausnehmung auf, in die das Kupplungselement eingreift. Somit überragt das Kupplungselement in der eingekuppelten Position die Kupplungsnase nach hinten, d.h., in Richtung der Gebäudetür. Gleichzeitig wird durch die Ausnehmung verhindert, dass das Kupplungselement mit dem Flansch der Rasterwelle kollidiert. Auf diese Weise ist eine sichere und zuverlässige Wirkverbindung zwischen Kupplungselement und Gegenkupplungselement, insbesondere Kupplungsnase, sichergestellt.
- Ein Einkuppeln erfolgt dadurch, dass der Kupplungsschieber mit dem Eingriffselement axial in Richtung der Kupplungswelle verschoben wird. Ein eingekuppelter Zustand liegt demnach vor, wenn das Eingriffselement des Kupplungsschiebers radial oberhalb des Flansches der Kupplungswelle liegt. In diesem Fall sind der Drehknauf und damit auch das Eingriffselement soweit frei rotierbar, bis das Eingriffselement an der Kupplungsnase der Kupplungswelle anliegt. In dieser Situation ist eine Wirkverbindung zwischen Kupplungselement, d.h., dem Eingriffselement, und dem Gegenkupplungselement, d.h., der Kupplungsnase, hergestellt. Wird der Drehknauf weiter rotiert, so wird über das Eingriffselement und die Kupplungsnase auch die Kupplungswelle rotiert, wodurch die Gebäudetür freigebbar bzw. entriegelbar ist.
- Das Zugangskontrollsystem kann dazu ausgebildet sein, dass das Betätigungselement sowohl, wenn sich das Kupplungselement in der ausgekuppelten Position, als auch, wenn sich das Kupplungselement in der eingekuppelten Position befindet, betätigbar ist.
- Es ist denkbar, dass mindestens ein erster Sensor und ein zweiter Sensor in dem Zugangskontrollsystem vorhanden sind. Der erste Sensor und der zweite Sensor übermitteln für die eingekuppelte Position und für die ausgekuppelte Position jeweils ein Signal an die Kontrolleinheit. Der erste Sensor und der zweite Sensor können somit jeder ein Signal bereitstellen, das kennzeichnet, ob sich das Kupplungselement in der eingekuppelten oder in der ausgekuppelten Position befindet. Somit wird eine höhere Fehlersicherheit erreicht.
- Insbesondere kann sich das Signal des ersten Sensors für die eingekuppelte Position von dem Signal des zweiten Sensors für die eingekuppelte Position unterscheiden. Zusätzlich oder alternativ kann sich das Signal des ersten Sensors für die ausgekuppelte Position von dem Signal des zweiten Sensors für die ausgekuppelte Position unterscheiden. Beispielsweise kann das Kupplungselement in der ausgekuppelten Position auf den ersten Sensor, jedoch nicht oder ungenügend auf den zweiten Sensor wirken. Entsprechend kann das Kupplungselement in der eingekuppelten Position auf den zweiten Sensor, nicht oder ungenügend jedoch auf den ersten Sensor wirken. Somit übermittelt in der ausgekuppelten Position der erste Sensor ein Signal, das eine Wirkung des Kupplungselements signalisiert, an die Kontrolleinheit. Der zweite Sensor übermittelt in der ausgekuppelten Position hingegen ein Signal, das eine fehlende oder ungenügende Wirkung des Kupplungselements signalisiert, an die Kontrolleinheit. Entsprechend umgekehrt ist es in der eingekuppelten Position.
- Optional kann vorgesehen sein, dass in einer Zwischenposition der erste und der zweite Sensor Signale an die Kontrolleinheit übermitteln, die sich von der Kombination der Signale des ersten und des zweiten Sensors für die eingekuppelte und für die ausgekuppelte Position unterscheiden. Unter der Zwischenposition wird eine Position verstanden, die zwischen der eingekuppelten und der ausgekuppelten Position liegt. Ein Halt in der Zwischenposition liegt dann vor, wenn das Kupplungselement während eines Einkupplungsvorgangs durch eine fehlerhafte geometrische Lage daran gehindert ist, die eingekuppelte Position zu erreichen. Beispielsweise kann in einer Zwischenposition das Kupplungselement sowohl auf den ersten als auch auf den zweiten Sensor wirken, so dass der erste und der zweite Sensor ein entsprechendes Signal an die Kontrolleinheit übermitteln. Alternativ kann beispielsweise in der Zwischenposition das Kupplungseelement weder auf den ersten noch den zweiten Sensor genügend wirken, so dass die Sensoren jeweils ein entsprechendes Signal an die Kontrolleinheit übermitteln.
- Der mindestens eine Sensor, insbesondere der erste und der zweite Sensor, kann als ein Lichtsensor ausgebildet sein. Hierbei kann insbesondere das Zugangskontrollsystem mindestens eine Lichtquelle als einen Sender aufweisen, dessen Licht der Sensor empfangen kann. Insbesondere ist für jeden Sensor jeweils eine Lichtquelle vorgesehen. Der Sensor und die Lichtquelle können jeweils eine Lichtschranke, insbesondere eine Transmissionslichtschranke, bilden. Handelt es sich um eine Transmissionsschranke, so wirkt das Kupplungselement auf den Sensor, indem das Kupplungselement den für den Sensor vorgesehenen Lichtstrahl unterbricht. Handelt es sich um eine Reflexionsschranke, so wirkt das Kupplungselement auf den Sensor, indem das Kupplungselement den Lichtstrahl reflektiert.
- Der mindestens eine Sensor, insbesondere der erste und der zweite Sensor, können auf einer Leiterkarte angeordnet sein. Bevorzugt ist die Kontrolleinheit auf derselben Leiterkarte angeordnet. Insbesondere ist die ganze Lichtschranke, bevorzugt die Lichtschranken des ersten und des zweiten Sensors, auf der einen Leiterkarte angeordnet. Insbesondere kann auf jeder Seite der Leiterkarte jeweils eine Lichtschranke angeordnet sein. Die Leiterkarte wirkt hierbei als eine Lichtscheide zwischen den Lichtschranken.
- Die Leiterkarte kann eine Ausbuchtung zur Anordnung der Lichtschranke um das Kupplungselement aufweisen. Hierbei ist die Lichtschranke um die Ausbuchtung angeordnet, so dass das Kupplungselement bei einer Bewegung in der Ausbuchtung den Lichtstrahl unterbrechen kann. Die Ausbuchtung verjüngt sich bevorzugt ausgehend von einer Kante der Leiterkarte ins Innere der Leiterkarte. Hierdurch kann die Leiterkarte einfach um das Kupplungselement angeordnet werden.
- Das Kupplungselement kann einen lichtdurchlässigen Bereich zum Durchlassen eines Lichts für den Sensor aufweisen. Hierdurch kann das Kupplungselement räumlich kompakt ausgestaltet sein.
- Das Kupplungselement, insbesondere des Drehknauf, kann insbesondere ein Kupplungsschieber sein. Der Kupplungsschieber weist einen zusätzlichen Steg auf, wobei dieser Steg zur Positionsbestimmung des Kupplungsschiebers verwendbar ist. Dazu durchbricht der Steg in einer ausgekuppelten Position des Kupplungselements eine erste Lichtschranke, während der Steg in einer eingekuppelten Position des Kupplungselements eine zweite Lichtschranke durchbricht. Ebenso kann der Steg in einer Zwischenposition angeordnet sein, in der weder die erste noch die zweite Lichtschranke durchbrochen sind. Durch die Verwendung des Steges ist vorteilhafterweise möglich, dass die Sensoren der Lichtschranken entfernt von dem eigentlichen Kupplungselement angeordnet werden können.
- Das Kupplungselement kann sowohl in der eingekuppelten Position als auch in der ausgekuppelten Position mit dem Betätigungselement, insbesondere mit der Handhabe oder dem Drehknauf, mitdrehbar sein. Hierbei übermittelt der Sensor bevorzugt für die eingekuppelte und/oder für die ausgekuppelte Position des Kupplungselementes unabhängig von der Position des Betätigungselementes dasselbe Signal an die Kontrolleinheit. Anders ausgedrückt, kann der Sensor unabhängig von der Position des Betätigungselementes in der ausgekuppelten Position stets dasselbe Signal erzeugen. Entsprechend kann der Sensor unabhängig von der Position des Betätigungselementes in der eingekuppelten Position stets dasselbe Signal erzeugen. Hierdurch kann ein von der Position des Betätigungselementes unabhängiges Signal erzeugt werden.
- Hierbei kann es sein, dass der Sensor sich nicht mit dem Betätigungselement dreht. In diesem Fall kann das Kupplungselement räumlich derart ausgestaltet sein, dass eine unterschiedliche Anordnung des Kupplungselementes zum Sensor keinen Effekt auf das Signal des Sensors hat. Beispielsweise kann der lichtdurchlässige Bereich derart dimensioniert sein, dass Licht bei jeder möglichen Position des Betätigungselementes den lichtdurchlässigen Bereich passieren kann. Ebenfalls kann ein Kollimator vorgesehen sein, der das Licht in den lichtdurchlässigen Bereich lenkt.
- Alternativ ist es möglich, dass der Sensor sich mit dem Betätigungselement mitdreht.
- Die Aufgabe der Erfindung wird auch durch ein Verfahren zur Steuerung und/oder Regelung eines Antriebs, insbesondere eines elektrischen Motors, eines elektromechanischen Zugangkontrollsystems für eine Gebäudetür gelöst. Hierbei dient der Antrieb dazu, ein Kupplungselement zwischen einer eingekuppelten Position, in der das Kupplungselement sich in Wirkverbindung mit einem Gegenkupplungselement befindet, und einer ausgekuppelten Position, in der sich das Kupplungselement außer Wirkverbindung mit dem Gegenkupplungselement befindet, zu bewegen. Das erfindungsgemäße Verfahren weist die folgenden Schritte auf:
- a. Erzeugen eines Signals, das zumindest eine Position des Kupplungselementes kennzeichnet, durch zumindest einen Sensor,
- b. Übermitteln des Signals des Sensors an eine Kontrolleinheit,
- c. Steuern und/Regeln des Antriebs durch die Kontrolleinheit in Abhängigkeit von dem Signal des Sensors.
- Dadurch, dass das erfindungsgemäße Verfahren eine Kooperation zwischen dem Sensor und der Kontrolleinheit vorsieht, kann die Kontrolleinheit anhand der Position des Kupplungselementes entscheiden, wie der Antrieb zu steuern und/oder zu regeln ist. Damit ist eine gewisse Intelligenz geschaffen worden, die es ermöglicht, zu kontrollieren, ob ein Ein- oder Auskupplungsvorgang zu der zu erreichenden Position des Kupplungselementes geführt hat und die weitere Steuerung und/oder Regelung des Antriebs darauf abzustimmen. Somit kann auf ein Federelement verzichtet und elektrische Energie gespart werden.
- Das Verfahren ist für einen Sensor beschrieben. Anstelle des einen Sensors können auch mehrere Sensoren, insbesondere der beschriebene erste und zweite Sensor, verwendet werden.
- Bevorzugt kann die Kontrolleinheit eine Zeit erfasst und den Antrieb in Abhängigkeit von der Zeit steuern und/oder regeln. So kann es zumindest einen Verfahrensschritt geben, bei dem die Kontrolleinheit den Antrieb in Abhängigkeit von der Zeit steuert, ohne dass das Signal des Sensors berücksichtigt wird. Zusätzlich oder alternativ kann es zumindest einen Verfahrensschritt geben, bei der die Kontrolleinheit den Antrieb in Abhängigkeit von dem Signal des Sensors steuert und/oder regelt, ohne eine erfasste Zeit zu berücksichtigen. Ebenfalls kann es mindestens einen Verfahrensschritt geben, bei dem die Kontrolleinheit in Abhängigkeit von der erfassten Zeit und in Abhängigkeit von dem Signal des Sensors den Antrieb steuert und/oder regelt.
- Es kann sein, dass die Kontrolleinheit sowohl den Einkupplungsvorgang als auch den Auskupplungsvorgang anhand des Signals des Sensors steuert und/oder regelt.
- Es ist denkbar, dass die Kontrolleinheit den Antrieb in Abhängigkeit von dem übermittelten Signal des Sensors startet und/oder anhält. Insbesondere startet und/oder hält die Kontrolleinheit den Antrieb nur in Abhängigkeit von dem übermittelten Signal des Sensors an. Durch eine Überprüfung der Position des Sensors vor dem Start kann ermittelt werden, ob der Kupplungsvorgang überhaupt eingeleitet werden muss.
- Eine weitere Bedingung für den Start eines Einkupplungsvorgangs kann sein, dass ein Benutzer als berechtigt authentifiziert worden ist. Hierzu kann das Zugangskontrollsystem insbesondere eine Empfangs- und/oder Sendeeinheit aufweisen. Die Empfangs- und/oder Sendeeinheit dient zum kabellosen Empfang eines Authentifizierungscodes. Der Authentifizierungs-Geber kann passiv, d. h. ohne eigene Energieversorgung, oder aktiv, d. h. mit einer eigenen Energieversorgung, ausgestaltet sein. So kann der Authentifizierungs-Geber als ein passiver oder als ein aktiver Transponder ausgebildet sein. Beispielsweise ist ein RFID-Transponder denkbar. Nach der Übertragung des Authentifizierungscodes kann die Authentifizierung eines Benutzers überprüft werden. Hierzu wird der empfangene Authentifizierungs-Code mit einem in dem Zugangskontrollsystem gespeicherten und/oder von einer authorisierten Stelle ebenfalls empfangenen Vergleichscode oder mit einer in dem Zugangskontrollsystem gespeicherten und/oder von einer authorisierten Stelle ebenfalls empfangenen Vorgabe überprüft. Verläuft die Überprüfung positiv, d. h. stimmen beispielsweise der Authentifizierungs- und der Vergleichscode überein, so ist der berechtigte Benutzer authentifiziert und der Einkupplungsvorgang kann gestartet werden.
- Eine weitere Bedingung für den Start eines Auskupplungsvorgangs kann sein, dass eine vorgegebene Haltezeit seit dem Erreichen der eingekuppelten Position abgelaufen ist. Somit kann ein nach dem berechtigten Benutzer ankommende unberechtigte Benutzer nicht auf das Schloss wirken.
- Insbesondere kann die Kontrolleinheit den Antrieb anhalten, wenn die Kontrolleinheit anhand des Signals des Sensors feststellt, dass die zu erreichende Position des Kupplungselementes erreicht worden ist.
- Die Kontrolleinheit überprüft während eines Kupplungsvorgangs mit einer festgelegten Frequenz die Signale des Sensors. Stellt die Kontrolleinheit anhand des Signals fest, dass die zu erreichende Position, also die eingekuppelte oder die ausgekuppelte Position, erreicht worden ist, so hält die Kontrolleinheit unmittelbar den Antrieb an. Das Anhalten des Antriebs erfolgt insbesondere unabhängig von einem festgelegten Zeitintervall zum Erreichen der zu erreichenden Position.
- In der ausgekuppelten Position kann das Kupplungselement beabstandet von einem vor einer Wegstrecke für den Einkupplungsvorgang angeordneten Bauteil angeordnet ist. Bei dem Bauteil kann es sich insbesondere um den Antrieb handeln. Zusätzlich oder alternativ kann in der eingekuppelten Position das Kupplungselement beabstandet von einem hinter der Wegstrecke angeordneten Bauteil angeordnet sein. Hierdurch kann ein Festfahren des Kupplungselements vermieden werden. Durch das unmittelbare Anhalten bei Erreichen der zu erreichenden Position kann die eingekuppelte und/oder die ausgekuppelte Position, die beabstandet von einem vor bzw. hinter der Wegstrecke angeordneten Bauteil ist, eingehalten werden.
- Vorzugsweise hält die Kontrolleinheit den Antrieb an, wenn nach einem festgelegten Zeitintervall die Kontrolleinheit anhand des Signals des Sensors feststellt, dass die zu erreichende Position des Kupplungselementes nicht erreicht wurde. Das Zeitintervall kann in der Kontrolleinheit hinterlegt sein. Sollte das Kupplungselement z. B. in der Zwischenposition verharren, so kann die Kontrolleinheit den Antrieb anhalten und somit Energie sparen als auch eine Beschädigung verhindern.
- Es ist denkbar, dass, nachdem die Kontrolleinheit den Antrieb aufgrund des Nicht Erreichens der zu erreichenden Position des Kupplungselementes angehalten hat, die Kontrolleinheit den Antrieb nach einem festgelegten Pausenintervalls erneut startet. Das Pausenintervall kann in der Kontrolleinheit hinterlegt sein.
- Bevorzugt wird der Antrieb erneut gestartet, um die zu erreichende Position zu erreichen. Die zu erreichende Position kann die eingekuppelte Position sein. Hierdurch wird erreicht, dass trotz einem Halt in der Zwischenposition die eingekuppelte Position doch noch erreicht werden kann. Beispielsweise kann zunächst z. B. durch eine Betätigung des Betätigungselementes durch den Benutzer das Kupplungselement die eingekuppelte Position nicht erreichen. Verbessert sich die geometrische Stellung des Kupplungselements und des Gegenkupplungselements zueinander, so dass ein Erreichen der eingekuppelten Position ermöglicht wird, so kann durch den erneuten Start des Antriebs die eingekuppelte Position erreicht werden, ohne dass der Benutzer sich erneut authentifizieren muss. Z. B. kann der Benutzer in dem Pausenintervall das Betätigungselement des Beschlags loslassen und das Betätigungselement durch eine Feder in eine Ruheposition zurückkehren, so dass die für das Einkuppeln notwendige Stellung des Kupplungs- und des Gegenkupplungselement erreicht während des Pausenintervalls erreicht wird. Ebenfalls kann die für das Einkuppeln notwendige Stellung des Kupplungs- und des Gegenkupplungselement bei einem Drehknauf durch eine weitere Drehung des Benutzers während des Pausenintervalls erreicht werden.
- Alternativ oder zusätzlich kann die zu erreichende Position die ausgekuppelte Position sein. Hierdurch wird ein Unterbrechen der Wirkverbindung angestrebt.
- Der Antrieb kann auch neu gestartet werden, um eine andere Position als die zu erreichende Position zu erreichen. Beispielsweise kann nach mehreren erfolglosen Einkuppelvorgängen das Kupplungselement in die ausgekuppelte Position bewegt werden.
- Insbesondere kann in der Kontrolleinheit zumindest eine festgelegte Anzahl von erneuten Starts des Antriebs hinterlegt sein, um nach einem Pausenintervall die zu erreichende Position des Kupplungselementes zu erreichen. Das Pausenintervall kann in Abhängigkeit der bereits durchgeführten erneuten Starts variieren oder konstant bleiben. Es können auch mehrere Anzahlen von erneuten Starts in der Kontrolleinheit hinterlegt sein, um das Pausenintervall zu variieren.
- Ist nach der festgelegten Anzahl der erneuten Starts die zu erreichende Position nicht erreicht worden, so ist es denkbar, dass im Falle der eingekuppelten Position als zu erreichende Position ein Auskuppelvorgang eingeleitet wird. Im Falle der ausgekuppelten Position als zu erreichende Position kann ein Fehlersignal, insbesondere ein optisches Fehlersignal, ausgegeben werden.
- Es ist möglich, dass die Kontrolleinheit die elektrische Leistung für den Antrieb während eines Kupplungsvorgangs variiert. Es ist insbesondere denkbar, dass das Zugangskontrollsystem derart ausgebildet ist, dass während einer Bewegung des Kupplungselementes von der ausgekuppelten Position in die eingekuppelte Position und/oder von einer Bewegung von der eingekuppelten Position in die ausgekuppelte die elektrische Leistung des Antriebs reduziert wird. Zunächst kann die elektrische Leistung des Antriebs besonders hoch gewählt werden. Somit trägt die zunächst gewählte elektrische Leistung zur Schnelligkeit des Einkuppel- und/oder Auskuppelvorgangs bei. Durch die Schnelligkeit des Einkuppelvorgangs wird darauf hingewirkt, dass das Kupplungselement die eingekuppelte Position ohne Halt in der Zwischenposition zu erreichen. Damit trotz des schnellen Einkupplungsvorgangs das Kupplungselement in der eingekuppelten Position anhält, kann besonders bevorzugt eine aktive Motorbremsung eingesetzt werden.
- Die Kontrolleinheit kann die elektrische Leistung des Antriebs bei Start des Antriebs, wenn sich das Kupplungselement in der Zwischenposition befindet, geringer wählen als die elektrische Leistung des Antriebs bei Start des Antriebs, wenn sich das Kupplungselement in der eingekuppelten und/oder ausgekuppelten Position befindet. Dadurch, dass sich das Kupplungselement in der Zwischenposition bereits näher an der zu erreichenden Position befindet, kann die reduzierte elektrische Leistung ausreichend sein, um schnell das Kupplungselement in die gewünschte Position zu bewegen und schnell genug anzuhalten.
- Das Zeitintervall für einen Einkupplungsvorgang aus der ausgekuppelten Position kann größer gewählt sein als das Zeitintervall für einen Einkupplungsvorgang aus der Zwischenposition und/oder als das Zeitintervall für einen Auskupplungsvorgang. Das Pausenintervall beim Auskuppeln kann länger gewählt sein als das Pausenintervall beim Einkuppeln.
- Das Zeitintervall für einen Einkupplungsvorgang aus der eingekuppelten Position kann beispielhaft zwischen 0,1 s und 2s, das Zeitintervall für einen Einkupplungsvorgang aus der Zwischenposition kann beispielhaft zwischen 0,05s und 1s, das Zeitintervall für einen Auskuppelvorgang kann beispielhaft zwischen 0,1 s und 1 s, das Pausenintervall für einen Einkupplungsvorgang kann beispielhaft zwischen 0,1 s und 1 s, das Pausenintervall für einen Auskuppelvorgang kann beispielhaft zwischen 1 s und 10 min betragen. Es sind erneute Starts mit einer Anzahl zwischen 2 und 100 denkbar.
- Durch das erfindungsgemäße Zugangskontrollsystem kann beispielsweise eine Ladungsmenge des Energiespeichers, die benötigt wird, um das Kupplungselement von der ausgekuppelten Position in die eingekuppelte Position ohne einen Halt in der Zwischenposition zu bewegen, beispielsweise in einem Bereich von 50 mAs bis 200 mAs, bevorzugt in einem Bereich von 50 mAs bis 150 mAs, besonders bevorzugt in einem Bereich von 55 mAs bis 100 mAs liegen. Eine Ladungsmenge des Energiespeichers, die benötigt wird, um das Kupplungselement von der eingekuppelten Position in die ausgekuppelte Position zu bewegen, kann in einem Bereich von 10 mAs bis 70 mAs, besonders bevorzugt in einem Bereich von 10 mAs bis 50 mAs liegen.
- Weitere die Erfindung verbessernde Maßnahmen ergeben sich aus der nachfolgenden Beschreibung zu Ausführungsbeispielen der Erfindung, welche in den Figuren schematisch dargestellt sind. Sämtliche aus den Ansprüchen, der Beschreibung oder den Zeichnungen hervorgehenden Merkmalen und/oder Vorteilen, einschließlich konstruktiver Einzelheiten, räumlicher Anordnung oder Verfahrensschritte, können sowohl für sich als auch in den verschiedensten Kombinationen erfindungswesentlich sein. Es zeigen:
- Figur 1
- eine perspektivische Vorderansicht eines erfindungsgemäßen Beschlags mit einem erfindungsgemäßen Beschlagskörper,
- Figur 2
- eine perspektivische Rückansicht des Beschlags aus
Figur 1 , - Figur 3
- eine Vorderansicht des Beschlags aus
Figur 1 - Figur 4
- eine Explosionsansicht von Teilen eines Beschlagskörpers des Beschlags aus
Figur 1 , - Figur 5
- Ein Längsschnitt entlang A-A durch einen Teil des Beschlags aus
Figur 3 mit einem Kupplungselement in einer eingekuppelten Position, - Figur 6
- Der Ausschnitt aus
Figur 5 mit dem Kupplungselement in einer ausgekuppelten Position, - Figur 7
- Eine Rückansicht des teilweise geöffneten Beschlags aus
Figur 1 in einer Ruheposition, - Figur 8
- Die Ansicht aus
Fig. 6 in einer Betätigungsposition, - Figur 9
- die Ansicht aus
Figur 1 , bei der ein Inneres des Beschlags 1 teilweise dargestellt ist, - Figur 10
- einen Querschnitt durch ein Kupplungselement, ein Gegenkupplungselement und ein Übertragungselement des Beschlags aus
Figur 1 , wobei die Lage des Schnitts ausFigur 5 gemäß C-C ersichtlich ist, - Figur 11
- ein erfindungsgemäßes Verfahren für ein Einkuppeln und
- Figur 12
- ein erfindungsgemäßes Verfahren für ein Auskuppeln.
- Fig. 13
- eine schematische Explosionsdarstellung des Schließzylinders gemäß einem Ausführungsbeispiel der Erfindung,
- Fig. 14
- eine schematische Darstellung einer Kuppeleinheit des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 15
- eine schematische Darstellung eines Teilbereichs der Kuppeleinheit des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 16
- eine schematische Darstellung eines Teilbereichs des Drehknaufs des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 17
- eine schematische Darstellung eines weiteren Teilbereichs des Drehknaufs des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 18
- eine andere schematische Darstellung des weiteren Teilbereichs des Drehknaufs des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 19
- einen weiteren anderen Teilbereich des Drehknaufs des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 20
- eine schematische Darstellung eines Verbindungsbereichs des Drehknaufs des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 21
- eine schematische Explosionsdarstellung der Teilbereiche des Drehknaufs aus
Fig. 19 undFig. 20 , - Fig. 22
- eine schematische Darstellung der Teilbereiche des Drehknaufs aus
Fig. 19 undFig. 20 , - Fig. 23
- eine schematische Schnittdarstellung aus
Fig. 22 , - Fig. 24
- eine schematische Darstellung der Stromversorgung des Drehknaufs des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 25
- eine schematische Darstellung des Drehknaufs des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung zusammen mit der Stromversorgung aus
Fig. 24 , - Fig. 26
- eine schematische Darstellung einer Verkleidung des Drehknaufs des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 27
- eine schematische Darstellung einer weiteren Verkleidung des Drehknaufs des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 28
- eine Kombination der
Fig. 26 und27 , - Fig. 29
- eine schematische Darstellung des Zylinderadapters des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 30
- eine schematische Darstellung eines Innenknaufs des Schließzylinders gemäß dem Ausführungsbeispiel der Erfindung,
- Fig. 31
- eine Explosionsdarstellung des Schließzylinders gemäß einem Ausführungsbeispiel der Erfindung.
- In einem Ausführungsbeispiel der Erfindung ist das erfindungsgemäße Zugangskontrollsystem 1 als ein Beschlag 1 ausgeführt und in den
Figuren 1 und 2 dargestellt. Der Beschlag 1 weist einen erfindungsgemäßen Beschlagskörper 2, eine Handhabe 30 als ein Betätigungselement, ein Übertragungselement 26 und Befestigungselemente 60 auf. Die Handhabe 30 ist als ein Türdrücker ausgestaltet. Das Übertragungselement 26 dient dazu, in eine Nuss eines Schlosses eingeführt zu werden und ein Drehmoment der Handhabe 30 auf das Schloss zu übertragen und damit eine Falle und/oder einen Riegel zu betätigen. Die Befestigungselemente 60 dienen zur Befestigung des Beschlags 1 an einer Gebäudetür. - Wie in
Figur 3 dargestellt, kann die Handhabe 30 verschiedene Positionen einnehmen. In einem montierten betriebsfertigen Zustand des Beschlags 1 kann die Handhabe 30 nur zwischen einer Ruheposition I, wie inFigur 3 in einer durchgezogenen Linie dargestellt, und einer Betätigungsposition II, wie inFigur 3 durch eine gestrichelte Linie dargestellt, bewegt werden. Die im montierten betriebsfertigen Zustand einnehmbaren Positionen der Handhabe 30 werden als Betriebspositionen bezeichnet. Ein Betriebswinkel BW ist als der Winkel zwischen der Ruheposition der Handhabe und der Betätigungsposition der Handhabe definiert. - In
Figur 4 sind Teile eines erfindungsgemäßer Beschlagskörper 2 in einer Explosionsansicht dargestellt. Der Beschlagskörper 2 ist mit einer Vorderseite 101, einer Rückseite 102 und Seitenflächen 103, 104, 105, 106 ausgebildet, wie in denFiguren 1 und 2 dargestellt. Der Beschlagskörper 2 weist einen Träger 10 auf, wieFigur 4 zeigt. Der Träger 10 ist mit einer Frontseite 111, einer inFigur 4 verdeckten Hinterseite 112 und Seiten 113, 114, 115, 116 ausgebildet. Der Träger 10 ist monolithisch aus einem Metall ausgebildet. Der Träger 10 weist einen Trägerkörper 19 und ein Lagerelement 11 auf. Das Lagerelement 11 ragt nach vorne von dem Trägerkörper 19 ab. Das Lagerelement 11 dient zur Lagerung der Handhabe 30. Hierbei ist das Lagerelement in der Handhabe 30 aufgenommen. Zwischen dem Lagerelement 11 und der Handhabe 30 ist eine Lagerhülse 33 vorgesehen, die zur haptisch angenehmen Betätigung der Handhabe 30 und zur Verschleißreduzierung der Handhabe 30 und des Lagerelementes 11 dient. - Auf der Frontseite 111 ist der Trägerkörper 19 von einer Blende 9 abgedeckt. Die Blende 9 setzt sich aus Blendenelementen 3, 4, 5 und einem weiteren in den
Figuren 1 und3 dargestellten Blendenelement 49, das im Blendenelement 5 eingesetzt ist, zusammen. Auf der Hinterseite 112 schließen sich an den Träger Abdeckelemente 6, 7 an. Die Blendenelemente 3, 4, 5, 49 und die Abdeckelemente 6, 7 sind jeweils separat voneinander ausgebildet. - Wie in
Figur 1 und 2 dargestellt, bilden die Blendenelement 3, 4 eine ebene, vorsprungsfreie Oberfläche. Nur um die Handhabe 30 herum kann die Blende 9 eine leichte Erhebung aufweisen. - Der Beschlag 1 ist als ein elektromechanischer Beschlag 1 ausgeführt. Hierzu weist der Beschlag 1 einen Antrieb 22, der als ein elektrischer Motor ausgebildet ist, auf. Über eine Spindel 23 bewegt der Antrieb 22 ein Kupplungselement 24, das in einem Einbauelement 20 geführt ist. Das Kupplungselement 24 kann in eine eingekuppelten Position X, die in
Figur 5 dargestellt ist, bewegt werden. In der eingekuppelten Position X greift das Kupplungselement 24 in eine Öffnung 73 des Gegenkupplungselements 25 des Beschlagskörpers 2 ein. Hierbei umgibt das Gegenkupplungselement 25 umfänglich das Kupplungselement 24, wie inFigur 10 dargestellt. - Das Einbauelement 20 und die Handhabe 30 sind drehfest miteinander, insbesondere durch eine Keilwellenverzahnung, verbunden. Dadurch dass das Kupplungselement 24 in dem Einbauelement 20 geführt ist, bewegt sich das Kupplungselement 24 bei einer Drehung der Handhabe 30 von einer Ruheposition I in eine Betätigungsposition II mit der Handhabe 30 mit. Somit überträgt sich ein Drehmoment von der Handhabe 30 auf das Kupplungselement 24. Greift das Kupplungselement 24 in das Gegenkupplungselement 25 ein, so kann das Drehmoment auf das Gegenkupplungselement 25 und auf das mit dem Gegenkupplungselement 25 drehfest verbundenen Übertragungselement 26 übertragen werden. Somit kann bei einer Betätigung der Handhabe 30 das Drehmoment auf das Schloss wirken.
- Wie in
Figur 10 dargestellt, ist ein Spiel zwischen dem Kupplungselement 24 und dem Gegenkupplungselement 25 vorgesehen. Daher kann es sein, dass der Benutzer zunächst die Handhabe 30 bewegen muss, bevor in der eingekuppelten Position X das Kupplungselement 24 ein Drehmoment auf das Gegenkupplungselement 25 überträgt. - In einer ausgekuppelten Position XI, die in
Figur 6 dargestellt ist, befindet sich das Kupplungselement 24 außer Eingriff mit dem Gegenkupplungselement 25. Auch in der ausgekuppelten Position XI kann die Handhabe 30 betätigt werden. Das Kupplungselement 24 dreht sich auch in der ausgekuppelten Position XI mit der Handhabe 30 mit. Allerdings kann ein Drehmoment in der ausgekuppelten Position XI nicht auf das Gegenkupplungselement 25 übertragen werden. Somit bleibt eine Bewegung der Handhabe 30 wirkungslos auf das Schloss. - In der
Figur 6 gestrichelt ist eine Zwischenposition XII des Kupplungselements 24 dargestellt, in der sich das Kupplungselement 24 befindet, wenn der Antrieb 22 versucht, das Kupplungselement 24 in die eingekuppelte Position X zu bewegen, jedoch auf aufgrund einer bereits erfolgten Drehung des Kupplungselementes 24 nicht in das Gegenkupplungselement 25 eingreifen kann, sondern an das Gegenkupplungselement 25 stößt. - Damit der Beschlagskörper 2 möglichst flach ausgeführt ist, sind der Antrieb 22 und ein in
Figur 9 dargestelltes Batteriefach 34 in der Handhabe 30 aufgenommen. Hierbei ist inFigur 9 ein oberer Teil des Inneren des Beschlags 1 dargestellt, wobei u. a. die Handhabe 30, der Träger 10, die Blende 9, die Abdeckelemente 6, 7 und das Übertragungselement 26 nicht dargestellt sind. Das Batteriefach 34 dient zur Aufnahme zumindest eines Energiespeichers 57, insbesondere eine Batterie oder Akkumulator, mit dessen Hilfe dem Antrieb 22 elektrische Leistung zugeführt werden kann. Ebenfalls befindet sich das Kupplungselement 24 in der ausgekuppelten Position XI zumindest teilweise in der Handhabe 30, wie inFigur 6 dargestellt. Die Handhabe 30 ist hierzu hohl ausgeführt. Insbesondere befinden sich das Kupplungselement 24, das Gegenkupplungselement 25, das Übertragungselement 26 und die Handhabe 30 auf einer gemeinsamen Achse 120. - Der Antrieb 22, eine Motortasche 21 für den Antrieb 22 und das Kupplungselement 24 sind in dem Einbauelement 20 aufgenommen. Das Einbauelement 20 ist in dem hohlen Lagerelement 11 drehbar gelagert. Hierbei überragt das Einbauelement 20 das Lagerelement 11 nach vorne, so dass das Einbauelement 20 über in
Figur 4 dargestellten Formschlussmittel 96 einen Formschluss mit der Handhabe 30 eingehen kann. Hierbei weist eine Innenseite der hohlen Handhabe 30 ein entsprechendes Formschlussmittel 58 auf. Das Einbauelement 20 ist hierbei ebenfalls teilweise in der hohlen Handhabe 30 angeordnet. - Damit der Antrieb 22 das Kupplungselement 24 in die eingekuppelte Position X bewegt, muss zuvor ein berechtigter Benutzer authentifiziert worden sein. Hierzu weist der Beschlag 1 eine Sende- und Empfangseinheit auf, mit der ein Authentifizierungscode kabellos empfangen werden kann. Die Sende- und Empfangseinheit kann eine in
Figur 9 schematisch dargestellte Antenne 51 aufweisen. Die Antenne 51 ist auf einer Platine 68 angeordnet. Der Authentifizierungscode kann von einem externen tragbaren Authentifizierungs-Geber an die Sende- und Empfangseinheit übertragen werden. Eine Kontrolleinheit 56, die auf einer Leiterkarte 50 angeordnet ist, überprüft den Authentifizierungs-Code und vergleicht diesen mit einem Vergleichscode oder einer Vorgabe. Die Kontrolleinheit 56 ist inFigur 9 von der Platine 68 verdeckt und daher nur gestrichelt dargestellt. Verläuft die Überprüfung positiv und stimmen z. B. der Authentifizierungs-Code und der Vergleichscode überein, so startet die Kontrolleinheit 56 ein Einkuppelverfahren gemäßFigur 11 . Die Platine 68 ist mit der Antenne 51 innerhalb des Trägers 10 angeordnet. Hierdurch kann ebenfalls ein besonders flacher Beschlag 1 erreicht werden. - Das erste Blendenelement 3 und das erste Abdeckelement 6 überdecken die Antenne 51. Damit Signale die Antenne 51 gut erreichen können, sind das erste Blendenelement 3 und das erste Abdeckelement 6 aus einem Kunststoff hergestellt. Der Träger 10 ist im Bereich der Antenne 51 als eine Durchgangsöffnung ausgebildet. Die Durchgangsöffnung dient als Elektronikaufnahme 13 für die Leiterkarte 50 und der mit der Leiterkarte 50 verbundenen Platine 68. Zudem weist der Träger 10 einen Spalt 84 auf, durch den eine elektrische leitende Verbindung um die Antenne 51 unterbrochen ist, wie in
Figur 4 dargestellt. - Neben der Antenne 51 zum Empfang des Authentifizierungs-Codes weist die Platine 68 ein nicht dargestelltes Antennenelement zum Empfang eines Vergleichcodes oder der Vorgabe auf. Über das Antennenelement werden Signale mit einer höheren Frequenz als mit der Antenne 51 empfangen.
- Wie in den
Figuren 5 und6 dargestellt wirkt der Antrieb 22 ohne einen Energiezwischenspeicher auf das Kupplungselement 24, wodurch elektrische Energie gespart wird. Hierdurch können hohe Standzeiten für den Energiespeicher 57 erreicht werden. Damit kontrollierbar ist, ob ein Ein- oder Auskupplungsvorgang zu der zu erreichenden Position des Kupplungselementes geführt hat, weist der Beschlag 1 einen ersten Sensor 53 und einen zweiten Sensor 54 auf. Für den ersten Sensor 53 ist eine erste Lichtquelle 44 vorgesehen, deren Lichtstrahl für den ersten Sensor 53 empfangbar ist. Für den zweiten Sensor 54 ist eine zweite Lichtquelle 45 vorgesehen, deren Lichtstrahl für den zweiten Sensor 54 empfangbar ist. Der erste Sensor 53 und die erste Lichtquelle 44 bilden zusammen eine erste Lichtschranke, die in denFiguren 4 und9 dargestellt ist. Der zweite Sensor 54 und die zweite Lichtquelle 45 bilden zusammen eine zweite Lichtschranke, die in denFiguren 7 und8 dargestellt ist. - Die erste und die zweite Lichtschranke 53, 54, 44, 45 sind auf der Leiterkarte 50 angeordnet. Die erste Lichtschranke 53, 44 und die zweite Lichtschranke 54, 45 sind auf verschiedenen Seite der Leiterkarte 50 ausgebildet. Die Leiterkarte 50 wirkt hierbei als eine Lichtscheide zwischen den Lichtschranken 53, 54, 44, 45. Die Leiterkarte 50 weist eine Ausbuchtung 75 auf zur Anordnung der Lichtschranken 53, 54 44, 45 um das Kupplungselement 24 auf.
- Die Sensoren 53, 54 kennzeichnen die eingekuppelte und die ausgekuppelte Position X, XI. Wie in
Figur 5 dargestellt, kann in der eingekuppelten Position X der erste Sensor 53 einen Lichtstrahl der Lichtquelle 44 empfangen. - In diesem Fall übermittelt der erste Sensor 53 ein Signal, das die Kontrolleinheit als "1" interpretiert, an die Kontrolleinheit 56. In der eingekuppelten Position X kann der zweite Sensor 54 keinen Lichtstrahl der Lichtquelle 45 empfangen, da das Kupplungselement 24 den Lichtstrahl unterbricht. Der zweite Sensor 54 übermittelt ein Signal, das die Kontrolleinheit als "0" interpretiert, an die Kontrolleinheit 56.
- Wie in
Figur 6 dargestellt, kann in der ausgekuppelten Position XI der erste Sensor 53 keinen Lichtstrahl der Lichtquelle 44 empfangen, da das Kupplungselement 24 den Lichtstrahl unterbricht. In diesem Fall übermittelt der erste Sensor 53 ein Signal, das die Kontrolleinheit als "0" interpretiert, an die Kontrolleinheit 56. In der ausgekuppelten Position XI kann der zweite Sensor 54 einen Lichtstrahl der Lichtquelle 45 empfangen, Der zweite Sensor 54 übermittelt ein Signal das die Kontrolleinheit als "1" interpretiert, an die Kontrolleinheit 56. Anhand der unterschiedlichen Signale des ersten und des zweiten Sensors 53, 54 für die beiden Position X, XI kann die Kontrolleinheit 56 erfassen, in welcher der beiden Positionen X, XI sich das Kupplungselement 24 befindet. - Damit in der eingekuppelten Position X der Lichtstrahl der ersten Lichtquelle 44 das Kupplungselement 24 passiert, weist das Kupplungselement 24 einen lichtdurchlässigen Bereich 28 auf, der als Durchgangsöffnung ausgebildet ist, wie in den
Figuren 4 ,5 und6 dargestellt. Ebenfalls weist das Einbauelement 20 einen Lichtdurchlass 70 auf, wie in denFiguren 4 ,6 ,7 und8 dargestellt. Der Lichtdurchlass 70 ergibt sich daraus, dass ein Führungsteil 71 des Einbauelementes 20 unterbrochen ist wie in denFiguren 7 und8 dargestellt. Der Führungsteil 71 dient dazu in eine rundumlaufende Nut des Gegenkupplungselements 25 einzugreifen, wie inFigur 5 dargestellt. Hierdurch wird das Gegenkupplungselement 25 zu dem Einbauelement 20 ausgerichtet. In den Lichtdurchlass 70 ist ein Kollimator 55 eingesetzt, wie in denFiguren 4 ,7 und8 dargestellt. - In den
Figuren 7 und8 sind Rückansichten des Beschlags 1 dargestellt. Hierbei sind jeweils das Übertragungselement 26, das Gegenkupplungselement 25 und das Abdeckelement 7 nicht dargestellt.Figur 7 zeigt dabei eine Ansicht in der Ruheposition I undFigur 8 dieselbe Ansicht in der Betätigungsposition II. Wie in denFiguren 7 und8 dargestellt ist, leitet der Kollimator 55 sowohl in der Ruheposition I als auch in der Betätigungsposition II den Lichtstrahl durch den Lichtdurchlass 70. Ebenfalls leitet der Kollimator 55 den Lichtstrahl auch in den übrigen Betriebspositionen durch den Lichtdurchlass 70. Der Kollimator 55 leitet den Lichtstrahl durch den lichtdurchlässigen Bereich 28 in der eingekuppelten Position X für alle Betriebspositionen. Somit ist das Signal, das die Sensoren 53, 54 an die Kontrolleinheit 56 übermitteln, unabhängig von der Betriebsposition der Handhabe 30. - In der eingekuppelten Position X des Kupplungselementes 24 ist das Kupplungselement 24 beabstandet von dem hinter dem Kupplungselement 24 liegenden Übertragungselement 26 angeordnet. In der ausgekuppelten Position XI ist das Kupplungselement 24 beanstandet von dem vor dem Kupplungselement 24 liegenden Antrieb 22 angeordnet. Hierdurch kann ein Festfahren des Kupplungselementes 24 vermieden werden.
- Das Gegenkupplungselement 25 ist hierzu offen ausgeführt, so dass das Kupplungselement 24 tief in das Gegenkupplungselement 25 eingreifen kann, ohne dass das Gegenkupplungselement 25 in Bewegungsrichtung gegen das Gegenkupplungselement 25 stößt.
- Ferner ist eine Verzahnung des Gegenkupplungselements 25 mit dem Übertragungselement 26 radial ausgebildet. Die Verzahnung des Gegenkupplungselementes 25 ist um den Umfang des Gegenkupplungselements ausgebildet, welche in eine Vertiefung des Übertragungselementes 26 eingreift. Hierdurch kann ein Abstand des Kupplungselements 24 in der eingekuppelten Position X zu dem dahinterliegenden Übertragungselement 26 groß ausgebildet werden.
- Die Kontrolleinheit 56 hält das Kupplungselement 24 an, sobald die Sensoren 53, 54 die für die zu erreichende Position X, XI kennzeichnenden Signale übermitteln. Hierdurch kann das Kupplungselement 24 sich beabstandet von dem Übertragungselement 26 und dem Antrieb 22 bewegen.
- Damit das Kupplungselement 24 die eingekuppelte Position X ohne Halt in der Zwischenposition XII erreicht, kann das Gegenkupplungselement 25 gegenüber dem Kupplungselement 24 ein Spiel aufweisen, wie in
Figur 10 dargestellt. Hierdurch ist es möglich, dass das Kupplungselement 24 über einen Drehwinkelbereich in das Gegenkupplungselement 25 eingreift. Somit kann auch, wenn der Benutzer bereits beginnt, die Handhabe 30 zu betätigen, die eingekuppelte Position X noch erreicht werden. Zur flächigen Anlage des Kupplungselements 24 an das Gegenkupplungselement 25 ist die Öffnung 73 geschwungen ausgeführt, wie inFigur 10 dargestellt. - Das Kupplungselement 24 ist in der ausgekuppelten Position XI mit einem Abstand KG von dem Gegenkupplungselement 25 entfernt, wie in
Figur 6 dargestellt. Der Abstand KG wird als Messstrecke der zweiten Lichtschranke 54, 45 verwendet. Hierbei kann ein Lichtstrahl der zweiten Lichtquelle 45 in der ausgekuppelten Position XI den zweiten Sensor 54 erreichen. - Ferner sind weitere bauliche Maßnahmen zum Erreichen der eingekuppelten Position X ohne Halt in der Zwischenposition XII vorgesehen.
- So ist durch das Führungsmittel 71 und die Nut 72 das Gegenkupplungselement 25 unmittelbar an dem Einbauelement 20 geführt, so dass eine Ausrichtung des Einbauelements 20 und des Gegenkupplungselements 25 zueinander erreicht wird.
- Ferner bewegen der Antrieb 22 und die Spindel 23 das Kupplungselement 24 über einen Mitnehmer 29, wie in den
Figuren 5 und6 dargestellt. Hierbei weist nur der Mitnehmer 29 ein Innengewinde zum Eingriff in die Spindel 23 auf. Die Spindel 23 und das Kupplungselement 24 weisen zueinander ein Spiel auf. Ebenso ist der Mitnehmer 29 in dem Kupplungselement 24 quer zur Bewegungsrichtung des Kupplungselements 24 beweglich gelagert. - Das Gegenkupplungselement 25 und das Übertragungselement 26 sind separat zueinander ausgeführt. Das Gegenkupplungselement 25 ist zwischen dem Träger 10 und dem Abdeckelement 7 axial befestigt, wie in den
Figuren 5 und6 dargestellt. Hierzu weist der Träger 10 eine Aufnahme 63 auf, wie in denFiguren 5 bis 8 dargestellt. Das Gegenkupplungselement 25 ist in der Aufnahme 63 drehbar gelagert. - Das Übertragungselement 26 und das Gegenkupplungselement 25 weisen ein Spiel zueinander auf, wie in
Figur 10 dargestellt. Das Übertragungselement 26 ist axial und radial in dem zweiten Abdeckelement 7 gelagert, wie inFigur 5 dargestellt. Somit ist es für das Übertragungselement 26 möglich, sich der Lage eines Schlosses anzupassen, ohne dass das Gegenkupplungselement 25 in der Ausrichtung zum Kupplungselement 24 variiert. Hierbei ist ein dem Gegenkupplungselement 25 abgewandtes Ende des Übertragungselement 26 in mehrere Raumrichtungen beweglich. Insbesondere weist das zweite Abdeckelement 7 einen Kragen 87, 88 auf, in dem das Übertragungselement 26 kugelgelenkartig gelagert ist. Das Gegenkupplungselement 25 und das Übertragungselement sind über eine geschwungene Verzahnung miteinander verbunden, wie inFigur 10 dargestellt. Daher liegen das Übertragungselement 26 und das Gegenkupplungselement 25 bei einer Drehmomentübertragung trotz des Spiels flächig aneinander an. - Insbesondere weist das zweite Abdeckelement 7 einen in
Figur 4 dargestellten Kragen 86 auf, in der das Übertragungselement 26 kugelgelenkartig gelagert ist. - Wie in den
Figuren 7 und8 dargestellt, weist der Beschlagskörper 2 eine Feder 40 auf. Die Feder 40 dient dazu, die Handhabe 30 in die Ruheposition I zu bewegen. Die Feder 40 ist über einen Hebel 42 mittelbar mit der Handhabe 30 verbunden. Die Feder 40 ist als Druckfeder ausgestaltet. Der Hebel 42 ist über einen Fortsatz mit der Handhabe 30 verbunden. Hierbei entspricht der Fortsatz einem Anschlagelement 43. Das Anschlagelement 43 ist Teil des monolithisch ausgebildeten Einbauelements 20, wie inFigur 4 dargestellt, und somit drehfest und reversibel lösbar mit der Handhabe 30 verbunden. - Der Träger weist einen ersten Anschlag 46 und einen zweiten Anschlag 47 auf. Die Anschläge 46, 47 dienen zur Begrenzung einer Bewegung der Handhabe 30 im montierten Zustand. Hierbei liegt das Anschlagelement 43 in der Ruheposition I an dem ersten Anschlag 46 und in der Betätigungsposition an dem Anschlag 47 an.
- Der Hebel 42 ist in dem Anschlagelement 43 eingelegt und drehbar gelagert. Ein anderes Ende des Hebels 42 ist über einen Federschlitten 41 mit der Feder 40 verbunden. Der Hebel 42 ist hierbei in dem Federschlitten 41 drehbar gelagert. Die Federaufnahme 83 umgibt die Feder 40. Die Federaufnahme 83 wirkt des Weiteren zur Führung des Federschlittens 41. Während einer Kompression oder einer Dekompression der Feder wird der Hebel 42 über den Federschlitten 41 an der Federaufnahme 83 geführt, wobei der Federschlitten 41 an der Federaufnahme 83 entlanggleitet. Hierdurch wird eine Bewegung des Hebels 42 vorgegeben.
- Der Hebel 41 ist derart mit der Feder 40 und dem Anschlagelement 43 verbunden, dass während einer Bewegung von der Betätigungsposition II in die Ruheposition I ein Winkel FH zwischen der Feder 40 und dem Hebel 41 und ein Winkel HA zwischen dem Hebel 41 und dem Anschlagelement 43 sich derart verringern, dass das durch die Feder 40, den Hebel 41 und das Anschlagelement 43 auf die Handhabe 30 wirkende Drehmoment in der Ruheposition I größer ist als in der Betätigungsposition II. Hierdurch kann die Handhabe 30 besonders wirkungsvoll in Ruheposition I gehalten sein. Ferner wird hierdurch die während der Bewegung der Handhabe 30 von der Betätigungsposition II in die Ruheposition I sich verringernde Federkraft der Feder 40 überkompensiert.
- In
Figur 11 ist ein erfindungsgemäßes Einkuppelverfahren 200 dargestellt, so wie es in der Kontrolleinheit 56 hinterlegt ist. Hierbei wird das Einkuppelverfahren nach einer Authentifzierung eines berechtigten Benutzers gestartet. Während des Verfahrens werden fortlaufend mit einer vorgegebenen Frequenz die die Positionen X, XI des Kupplungselement 24 kennzeichnenden Signale der Sensoren 53, 54 abgefragt. Hierbei wird das Signal des ersten Sensors 53 abwechselnd mit dem Signal des zweiten Sensors 54 abgefragt. Die Frequenz kann beispielsweise zwischen 100 Hz und 10 kHz betragen. Ferner wird zumindest ab dem Start des Antriebs 22 die Zeit gemessen. Die Kontrolleinheit 56 ermittelt Zeitspannen, insbesondere ein Zeitintervall, eine Reduktionszeit und ein Pausenintervall. - In einem ersten Schritt 201 wird geprüft, ob das Kupplungselement 24 sich in der eingekuppelten Position X befindet, indem geprüft wird, ob die entsprechenden Signale der Sensoren 53, 54 vorliegen. Befindet sich das Kupplungselement 24 bereits in der eingekuppelten Position X, so wird das Verfahren 200 in einem Verfahrensschritt 202 beendet.
- Befindet sich das Kupplungselement 24 nicht in der eingekuppelten Position X, so wird der Antrieb 22 in einem Verfahrensschritt 203 gestartet, so dass sich das Kupplungselement 24 in Richtung der eingekuppelten Position X bewegt. Während der Antrieb 22 läuft, wird fortlaufend in einem Verfahrensschritt 204 überprüft, ob das Kupplungselement 24 die eingekuppelte Position X erreicht hat. Ist die eingekuppelte Position X erreicht worden, so wird in einem Verfahrensschritt 205 der Antrieb 22 unmittelbar angehalten. Anschließend an den Verfahrensschritt 205 findet jeweils der Verfahrensschritt 202 statt.
- Nach einer Reduktionszeit RZ wird die elektrische Leistung des Antriebs 22 reduziert.
- In einem Verfahrensschritt 206 wird festgestellt, dass ein Zeitintervall ZI abgelaufen ist, wobei das Kupplungselement 24 die eingekuppelte Position X nicht erreicht hat. In diesem Fall wird der Antrieb 22 gemäß Verfahrensschritt 207 angehalten. Ein Zählwert i, der angibt, wie oft der Verfahrensschritt 207 in dem Kupplungsverfahren 200 bereits durchgeführt wurde, wird um eins hochgesetzt.
- In einem Verfahrensschritt 208 wird überprüft, ob der Zählwert i die in der Kontrolleinheit 56 festgelegte Anzahl AE an Einkuppelvorgängen pro Einkupplungsverfahren 200 unterschreitet. Ist dieses der Fall, wird in einem Verfahrensschritt 209 ein Pausenintervall PI lang gewartet. Hat andererseits der Zählwert i die Anzahl AE bereits erreicht, wird in einem Verfahrensschritt 210 ein Auskupplungsverfahren 300 gemäß
Figur 12 eingeleitet. - Anschließend an den Verfahrensschritt 209 wird in einem Verfahrensschritt 211 überprüft, ob das Kupplungselement 24 die eingekuppelte Position X bereits erreicht hat. Ist dieses der Fall, so wird Verfahrensschritt 202 durchgeführt. Ist dieses nicht der Fall, so wird in einem Verfahrensschritt 212 der Antrieb 22 erneut derart gestartet, dass sich das Kupplungselement 24 in Richtung der eingekuppelte Position X bewegt, jedoch direkt mit einer reduzierten elektrischen Leistung.
- Während der Antrieb 22 läuft, wird fortlaufend in einem Verfahrensschritt 213 überprüft, ob das Kupplungselement 24 die eingekuppelte Position X erreicht hat. Ist die eingekuppelte Position X erreicht worden, so wird zum Verfahrensschritt 205 gewechselt.
- In einem Verfahrensschritt 214 wird festgestellt, dass das Zeitintervall ZI abgelaufen ist, wobei das Kupplungselement 24 die eingekuppelte Position X nicht erreicht hat. In diesem Fall wird zum Verfahrensschritt 207 gewechselt.
- In
Figur 12 ist ein erfindungsgemäßes Auskuppelverfahren 300 dargestellt, so wie es in der Kontrolleinheit 56 hinterlegt ist. Hierbei wird das Auskuppelverfahren 300 nach Ablauf einer Haltedauer gestartet. Während des Verfahrens werden fortlaufend mit einer vorgegebenen Frequenz die die Positionen X, XI des Kupplungselement 24 kennzeichnenden Signale der Sensoren 53, 54 abgefragt. Hierbei wird das Signal des ersten Sensors 53 abwechselnd mit dem Signal des zweiten Sensors 54 abgefragt. Die Frequenz kann beispielsweise zwischen 100 Hz und 10 kHz betragen. Ferner wird zumindest ab dem Start des Antriebs 22 die Zeit gemessen. Die Kontrolleinheit 56 ermittelt Zeitspannen, insbesondere ein Zeitintervall ZI, eine Reduktionszeit RZ und ein Pausenintervall PI. - In einem ersten Schritt 301 wird geprüft, ob das Kupplungselement 24 sich in der ausgekuppelten Position XI befindet, indem geprüft wird, ob die entsprechenden Signale der Sensoren 53, 54 vorliegen. Befindet sich das Kupplungselement 24 bereits in der ausgekuppelten Position XI, so wird das Verfahren 300 in einem Verfahrensschritt 302 beendet.
- Befindet sich das Kupplungselement 24 nicht in der ausgekuppelten Position XI, so wird der Antrieb 22 in einem Verfahrensschritt 303 derart gestartet, dass sich das Kupplungselement 24 in Richtung der ausgekuppelten Position XI bewegt. Während der Antrieb 22 läuft, wird fortlaufend in einem Verfahrensschritt 304 überprüft, ob das Kupplungselement 24 die ausgekuppelte Position XI erreicht hat. Ist die ausgekuppelte Position XI erreicht worden, so wird in einem Verfahrensschritt 305 der Antrieb 22 unmittelbar angehalten. Anschließend an den Verfahrensschritt 305 findet der Verfahrensschritt 302 statt.
- Nach einer Reduktionszeit RZ wird die elektrische Leistung des Antriebs 22 reduziert.
- In einem Verfahrensschritt 306 wird festgestellt, dass ein Zeitintervall ZI abgelaufen ist, wobei das Kupplungselement 24 die ausgekuppelte Position XI nicht erreicht hat. In diesem Fall wird der Antrieb 22 gemäß Verfahrensschritt 307 angehalten. Ein Zählwert i, der angibt, wie oft der Verfahrensschritt 307 in dem Kupplungsverfahren 300 bereits durchgeführt wurde, wird um eins hochgesetzt.
- In einem Verfahrensschritt 308 wird überprüft, ob der Zählwert i eine in der Kontrolleinheit 56 festgelegten ersten Anzahl AV1 an Auskuppelvorgängen pro Auskupplungsverfahren 300 unterschreitet. Ist dieses der Fall, wird in einem Verfahrensschritt 309 ein Pausenintervall PI lang gewartet. Hat andererseits der Zählwert i die Anzahl AV1 bereits erreicht, wird in einem Verfahrensschritt 310 überprüft, ob der Zählwert i eine in der Kontrolleinheit 56 festgelegte zweite Anzahl AV2 an Auskuppelvorgängen pro Auskupplungsverfahren 300 unterschreitet. Ist dieses der Fall, wird in einem Verfahrensschritt 311 ein Pausenintervall PI lang gewartet. Das Pausenintervall in Verfahrensschritt 311 unterscheidet sich von dem Pausenintervall in Verfahrensschritt 309 und ist insbesondere länger. Anschließend an den Verfahrensschritt 309 oder 311 wird zu Verfahrensschritt 301 gewechselt.
- Hat andererseits der Zählwert i die Anzahl AV2 bereits erreicht, wird in einem Verfahrensschritt 312 das Auskupplungsverfahren 300 abgebrochen und in einem Verfahrensschritt 313 ein Fehler optisch signalisiert. Danach wird in einem Verfahrensschritt 314 das Auskuppelverfahren 300 beendet.
- Die Zeitintervalle ZI in den Verfahrensschritten 206, 214 und 306 und die Pausenintervalle PI in den Verfahrensschritten 209, 309 und 311 können unterschiedlich lang gewählt sein. Insbesondere ist das Pausenintervall PI in dem Verfahrensschritt 209 kleiner als das Pausenintervall in dem Verfahrensschritt 309. Das Pausenintervall PI in dem Verfahrensschritt 309 kann kleiner als das Pausenintervall in dem Verfahrensschritt 311 sein. Ebenfalls kann das Zeitintervall ZI in dem Verfahrensschritt 206 größer als in den Verfahrensschritten 309 und 311 sein. Ebenso können neben den festgelegten Anzahlen AE, AV1 und AV2 weitere festgelegte Anzahlen vorgesehen, sein, um die Pausenintervalle weiter variieren zu können.
- In einem weiteren Ausführungsbeispiel der Erfindung ist das erfindungsgemäße Zugangskontrollsystem als Schließzylinder 2002 ausgeführt und als Explosionsdarstellung in
Fig. 13 gezeigt. Die Zusammenführung der einzelnen Baukomponenten zu dem erfindungsgemäßen Schließzylinder 2002 wird in den nachfolgenden Figuren beschrieben. - Der Schließzylinder 2002 umfasst drei Komponenten: einen Drehknauf 2001, einen Zylinderadapter 2003 und einen Innenknauf 2004. Sowohl über den Drehknauf 2001 als auch über den Innenknauf 2004 ist der Zylinderadapter 2003 betätigbar, sodass insbesondere eine mit dem Schließzylinder 2002 ausgestattete Tür freigebbar ist. Dabei ist erfindungsgemäß vorgesehen, dass der Zylinderadapter 2003 über den Innenknauf 2004 stets ansteuerbar ist, während der Drehknauf 2001 von einer Kuppeleinheit 2065 von dem Zylinderadapter 2003 entkoppelbar ist, sodass der Drehknauf 2001 frei rotierbar ist. Der Aufbau der Kuppeleinheit 2065 ist in
Fig. 14 gezeigt. -
Fig. 14 zeigt eine Explosionsdarstellung der Kuppeleinheit 2065. Die Kuppeleinheit 2065 umfasst eine Antriebstasche 2014, in der ein Antrieb 2015 aufgenommen ist. Der Antrieb 2015 ist mit einer Gewindespindel 2017 verbunden, sodass die Gewindespindel 2017 von dem Antrieb 2015 rotierbar ist. Auf der Gewindespindel 2017 ist ein Mitnehmer 2018 angeordnet, sodass durch eine Rotation der Gewindespindel 2017 durch den Antrieb 2015 der Mitnehmer 2018 axial auf der Gewindespindel 2017 verschoben wird, wenn der Mitnehmer 2018 rotationsfest gehalten wird. Zum rotationsfesten Halten ist der Mitnehmer 2018 in einer ersten Kupplungsschieberausnehmung 2027 eines Kupplungsschiebers 2016 angeordnet. Der Kupplungsschieber 2016 ist wiederum, wie inFig. 16 gezeigt ist, an einem Grundkörper 2005 des Drehknaufs 2001 gelagert, sodass lediglich eine axiale Verschiebung des Kupplungsschiebers 2016 und damit des Mitnehmers 2018 ermöglicht ist. Insbesondere eine Rotation des Kupplungsschiebers 2016 und damit des Mitnehmers 2018 ist somit verhindert. Auf diese Weise ist der Kupplungsschieber 2016 durch den Antrieb 2015 bewegbar, indem eine Rotation des Antriebs 2015 eine Rotation der Gewindespindel 2017 bewirkt, wodurch der Mitnehmer 2018 auf der Gewindespindel 2017 verschoben wird, was sich aufgrund der Anordnung des Mitnehmers 2018 in der ersten Kupplungsschieberausnehmung 2027 auf den Kupplungsschieber 2016 auswirkt. Somit ist der Kupplungsschieber 2016 parallel zu einer Welle des Antriebs 2015 und damit parallel zu der Gewindespindel 2017 bewegbar. - Der Kupplungsschieber 2016 weist ein Eingriffselement 2029 auf. Die Funktion des Eingriffselements 2029 wird mit Bezug auf
Fig. 21 beschrieben. Weiterhin kann der Kupplungsschieber 2016 vorteilhafterweise eine zweite Kupplungsschieberausnehmung 2028 aufweisen, wodurch der Kupplungsschieber 2016 ein sehr geringes Gewicht aufweist. Somit ist der Kupplungsschieber 2016 einfach und schnell beschleunigbar, sodass kurze Verschiebzeiten gewährleistet sind. - Der Antrieb 2015 ist innerhalb der Antriebstasche 2014 angeordnet. Dabei ist außerdem vorgesehen, dass ein Kabel zur Versorgung des Antriebs 2015 mit elektrischer Energie in einem Kabelkanal (nicht gezeigt) der Motortasche 2014 geführt ist. Das Kabel des Antriebs 2015 wird unter dem Antrieb 2015 oder seitlich der Antriebstasche 2014 eingefädelt und endet in einem Antriebssteckverbinder 2019. Zum Kontaktieren des Antriebs 15 weist die Motortasche 2014 einen Antriebssteckverbinderhalter 2026 auf. In dem Antriebssteckverbinderhalter 2026 ist der Antriebssteckverbinder 2019 angeordnet, insbesondere von unten eingesetzt, wobei der Antriebssteckverbinder 2019 als ein Antriebstecker ausgebildet und mit dem Kabel verbunden ist. Somit ist der Antrieb 2015 über den Antriebssteckverbinder 2019 elektrisch kontaktierbar und damit ansteuerbar. Zum Kontaktieren des Antriebssteckverbinders 2019 ist außerdem bevorzugt vorgesehen, dass der Antriebssteckverbinder 2019 spielbehaftet innerhalb des Antriebssteckverbinderhalters 2026 der Motortasche 2014 angeordnet ist. Das elektrische Kontaktieren des Antriebssteckverbinders 2019 ist in den
Fig. 17 und18 gezeigt. -
Fig. 15 zeigt den Antrieb 2015 mit der Gewindespindel 2017. Der Antrieb 2015 ist bevorzugt ein Gleichstrommotor und weist vorteilhafterweise einen Durchmesser von 6 mm auf. Die Gewindespindel 2017 ist auf einer Welle des Antriebs 2015 angebracht, wobei ein Abstand 2200 zwischen einem Gehäuse des Antriebs 2015 und der Gewindespindel 2017 vorteilhafterweise 0,3 mm bis 0,5 mm beträgt. Die Gewindespindel 2017 ist insbesondere eine M2-Gewindespindel. - Die Kuppeleinheit 2065 ist in den Grundkörper 2005 des Drehknaufs 2001 einschiebbar. Dazu weist der Grundkörper 2005, welcher insebesondere bevorzugt aus Metall ausgebildet ist, eine erste Halterung 2021 sowie eine zweite Halterung 2022 auf. Die erste Halterung 2021 dient zur Aufnahme der Antriebstasche 2014, während die zweite Halterung 2022 zur Aufnahme des Kupplungsschiebers 2016 dient. Zum Fixieren der Kuppeleinheit 2065 innerhalb des Grundkörpers 2005 weist die Antriebstasche 2014 außerdem einen Antriebsanschlag 2025 auf, der nach dem Einschieben der Antriebstasche 2014 in die erste Halterung 2021 an dem Grundkörper 2005 anliegt. Außerdem ist vorgesehen, dass in dieser Position Clipsnasen 2024 der Antriebstasche 2014 die erste Halterung 2021 umgreifen, sodass eine formschlüssige Verbindung zwischen der ersten Halterung 2021 des Grundkörpers 2005 und der Antriebstasche 2014 der Kuppeleinheit 2065 vorhanden ist. Somit ist die Kuppeleinheit 2065 fest und sicher in dem Grundkörper 2005 arretiert.
- Der Kupplungsschieber 2016 ist innerhalb der zweiten Halterung 2022 angeordnet. Innerhalb der zweiten Halterung 2022 ist der Kupplungsschieber 2016 longitudinal verschiebbar, d. h. parallel zu einer Längsachse 2100 des Grundkörpers 2005. Insbesondere ist vorgesehen, dass die Längsachse 2100 parallel zu der Welle des Antriebs 2015 angeordnet ist. Andere Bewegungen des Kupplungsschiebers 2016, insbesondere eine Rotation des Kupplungsschiebers 2016, sind durch die zweite Halterung 2022 verhindert.
- Der Grundkörper 2005 weist insbesondere einen Durchmesser von 40 mm auf. Dabei ist der Grundkörper 2005 vorteilhafterweise hohlzylinderförmig ausgebildet, wobei der zylinderförmige Grundkörper 2005 eine Mantelfläche 2020 aufweist. An einer Innenseite der Mantelfläche 2020 ist die zweite Halterung 2022 angebracht, wobei die erste Halterung 2021 relativ zu der zweiten Halterung 2022 radial innerhalb angeordnet ist. Durch die Anbringung der zweiten Halterung 2022 unmittelbar an der Mantelfläche 2020 ist ein größtmöglicher radialer Abstand zwischen dem Eingriffselement 2029 und der Längsachse 2100 erreicht. Somit muss das Eingriffselement 2029 geringe Kräfte übertragen, was mit Bezug auf
Fig. 21 erklärt wird. - Der Grundkörper 2005 weist außerdem eine Batterieausnehmung 2023 auf, die durch eine erste Mantelöffnung 2054 gebildet ist. Die Funktionalität der Batterieausnehmung 2023 wird mit Bezug auf
Fig. 25 erklärt. - Die erste Halterung 2021 und/oder die zweite Halterung 2022 können als axiale Durchgangsöffnung des Grundkörpers 2005 ausgebildet sein. Vorteilhafterweise ist jedoch vorgesehen, dass sowohl die erste Halterung 2021 als auch die zweite Halterung 2022 keine Durchgangsöffnungen sind. Auf diese Weise sind die erste Halterung 2021 und die zweite Halterung 2022 lediglich von einer Seite axial erreichbar. Von der axial gegenüberliegenden Seite ist ein Erreichen der ersten Halterung 2021 und/oder der zweiten Halterung 2022 somit nicht möglich. Dabei ist insbesondere vorgesehen, dass diese Seite diejenige Seite ist, die von dem Zylinderadapter 2003 weg weist. Somit ist eine Manipulation der Kuppeleinheit 2065 und damit des Drehknaufs 2001 verhinderbar.
- Die
Fig. 17 und18 zeigen eine Platine 2010, die innerhalb des Drehknaufs 2001 angeordnet ist. Dabei ist vorgesehen, dass ein erstes Platinenteil 2057 von einer ersten Stirnfläche 2051 des Grundkörpers 2005 (vgl.Fig. 19 ) an dem Grundkörper 2005 befestigt wird, während ein zweites Platinenteil 2061 von einer zweiten Stirnfläche 2052 (vgl.Fig. 7 ) des Grundkörpers 2005 an dem Grundkörper 2005 befestigt wird. Zwischen dem ersten Platinenteil 2057 und dem zweiten Platinenteil 2061 ist ein Verbindungsteil 2066 angeordnet. Das Verbindungsteil 2066 dient zum mechanischen und elektrischen Verbinden des ersten Platinenteils 2057 mit dem zweiten Platinenteil 2061. Das Verbindungsteil 2066 ist in diesem Ausführungsbeispiel vollständig flexibel ausgebildet. Alternativ kann das Verbindungsteil 2066 alternativ auch einen starren Anteil aufweisen. Das erste Platinenteil 2057 und/oder das zweite Platinenteil 2061 sind bevorzugt starr ausgebildet. - Das erste Platinenteil 2057 umfasst insbesondere eine Ansteuerung und/oder eine Regelung des Antriebs 2015. Daher weist das erste Platinenteil 2057 einen Antriebsgegensteckverbinder 2056 auf, der als eine Kontaktbuchse ausgebildet und mit dem Antriebssteckverbinder 2019 elektrisch verbindbar ist. Wird das erste Platinenteil 2057 an dem Grundkörper 2005 befestigt, so ist vorgesehen, dass eine Kontaktierung von Antriebssteckverbinder 2019 und Antriebsgegensteckverbinder 2056 zwangsläufig stattfindet. Um dies zu erreichen weist das erste Platinenteil 2057 eine Ausnehmung 2058 und eine Mittelbohrung 2067 auf. Die Ausnehmung 2058 dient zum Durchführen der ersten Halterung 2021 sowie der zweiten Halterung 2022 des Grundkörpers 2005 durch das erste Platinenteil 2057. Gleichzeitig ist das erste Platinenteil 2057 rotationsfest innerhalb des Grundkörpers 2005 gehalten. Durch die Mittelbohrung 2067 ist sichergestellt, dass das erste Platinenteil 2057 mittig in dem Grundkörper 2005 angeordnet ist, indem ein Positionierdom 2068 des Grundkörpers 2005 (vgl.
Fig. 19 ) durch die Mittelbohrung 2067 des ersten Platinenteils 2057 geführt ist. - Weiterhin weist das erste Platinenteil 2057 einen Batteriegegensteckverbinder 2041 auf, die von einem Batteriefach 2008 kontaktierbar ist (vgl.
Fig. 25 ). Somit ist insbesondere vorgesehen, dass das erste Platinenteil 2057 sämtliche elektrischen Komponenten umfasst, die zum Betreiben und Ansteuern des Antriebs 2015 notwendig sind. Dahingegen weist das zweite Platinenteil 2061 sämtliche elektrischen Komponenten auf, die für eine kabellose Datenübertragung benötigt werden. So ist insbesondere vorgesehen, dass das zweite Platinenteil 2061 kabellos mit Codekarten kommunizieren kann, welche anzeigen, ob eine Berechtigung zum Betätigen des Zylinderadapters 2003 vorliegt oder nicht. Über das Verbindungsteil 2066 kann das Empfangen einer derartigen Berechtigung durch das zweiten Platinenteil 2061 an das erste Platinenteil 2057 übertragen werden, sodass das erste Platinenteil 2057 die Kuppeleinheit 2065, insbesondere den Antrieb 2015, derart ansteuert, dass der Drehknauf 2001 an den Zylinderadapter 2003 angekoppelt ist. Dies wird durch ein Verschieben des Kupplungsschiebers 2016 bewirkt. - Um festzustellen, in welcher Position sich der Kupplungsschieber 2016 befindet, weist das erste Platinenteil 2057 außerdem einen ersten Sensor 2069 sowie einen zweiten Sensor 2070 auf, wobei der erste Sensor 2069 und der zweite Sensor 2070 auf unterschiedlichen Seiten des ersten Platinenteils 2057 angeordnet sind. Insbesondere sind der erste Sensor 2069 und/oder der zweite Sensor 2070 eine Lichtschranke. Die Lichtschranke ist von einem Steg 2071 des Kupplungsschiebers 2016 unterbrechbar, wobei je nach Position des Kupplungsschiebers 2016 die Lichtschranke des ersten Sensors 2069 oder die Lichtschranke des zweiten Sensors 2070 unterbrochen ist. Somit ist feststellbar, wo sich der Steg 2071 und damit der Kupplungsschieber 2016 befindet. Insbesondere ist auf diese Weise unterscheidbar, ob sich der Kupplungsschieber 2016 in einer eingekoppelten Position oder in einer ausgekoppelten Position befindet. Ein Unterschied zwischen der eingekoppelten Position und der ausgekoppelten Position wird mit Bezug auf die
Fig. 20 und21 erklärt. -
Fig. 7 zeigt den Grundkörper 2005 des Drehknaufs 2001 mit eingesetzter Platine 2010. Das Verbindungsteil 2066 ist dabei in einer Ausnehmung 2064 des Grundkörpers 2005 geführt. - Das erste Platinenteil 2057 wird über einen Haltering 2013 innerhalb des Grundkörpers 2005 gehalten. Die Befestigung des Halterings 2013 wird mit Bezug auf
Fig. 21 erklärt. Zum Fixieren des zweiten Platinenteils 2061 an der zweiten Stirnfläche 2052 des Grundkörpers 2005 sind zwei Befestigungsmittel 2072 vorgesehen, die durch Öffnungen des zweiten Platinenteils 2061 greifen. Die Befestigungsmittel 2072 sind insbesondere Schrauben, bevorzugt M2x4 Linsenkopfschrauben. - Die
Fig. 12 bis 23 beschreiben die Verbindung des Grundkörpers 2005 mit einer Rasterwelle 2011.Fig. 20 zeigt die Rasterwelle 2011 sowie eine Kupplungswelle 2012. Die Rasterwelle 2011 umfasst einen hülsenförmigen Bereich, der an seiner Außenseite eine Vielzahl von umlaufenden Nuten 2053 aufweist. Über die umlaufenden Nuten 2053 ist die Rasterwelle 2011 innerhalb des Zylinderadapters 2003 befestigbar. Das Innere des hülsenförmigen Bereichs bildet eine Aussparung 2059 für die Kupplungswelle 2012. Somit ist die Kupplungswelle 2012 innerhalb der Rasterwelle 2011 angeordnet. Ferner ist die Kupplungswelle 2012 auf einer Seite durch den Positionierdom 2068 des Grundkörpers 2005 (vgl.Fig. 19 ) und auf der anderen Seite durch einen Anschlag 2084, welcher an einem Flansch 2034 der Rasterwelle 2011 anliegt, axial fixiert. - Weiterhin ist die Rasterwelle 2011 über den Flansch 2034 die Rasterwelle 2011 mit dem Grundkörper 2005 verbindbar. Der Flansch 2034 weist außerdem Magnetausnehmungen 2073 auf, in denen Magnete 2060, insbesondere Neodym-Magnete, einsetzbar, insbesondere einklebbar, sind. Die Magnete 2060 sind bevorzugt bündig mit dem Flansch 2034. Ebenso sind an der Kupplungswelle 2012, insbesondere an einem Flansch der Kupplungswelle 2012, insbesondere in Flanschausnehmungen der Kupplungswelle 2012, Magnete 2060 angeordnet. Bevorzugt sind die Magnete 2060 in die Kupplungswelle 2012 eingeklebt. Mit den Magneten ist verhinderbar, dass der Mitnehmer 2018, insbesondere das Eingriffselement 2029, mit der Kupplungswelle 2012 kollidiert.
- Zum Einkuppeln weist die Kupplungswelle 2012 mindestens eine Kupplungsnase 2074 auf. In
Fig. 20 ist eine Kupplungswelle 2012 mit zwei Kupplungsnasen 2074 gezeigt. Über das Eingriffselement 2029 des Kupplungsschiebers 2016 ist die Kupplungswelle 2012 an eine Rotation des Grundkörpers 2005 ankoppelbar oder von einer Rotation des Grundkörpers 2005 trennbar. Befindet sich der Kupplungsschieber 2016 in einer eingekoppelten Position, d. h. in einer Position in der der Mitnehmer 2018 auf der Gewindespindel 2017 einen maximalen Abstand zu dem Antrieb 2015 aufweist, so ist ein Drehmoment von dem Grundkörper 2005 über den Kupplungsschieber 2016 auf die Kupplungsnase 2074 und somit auf die Kupplungswelle 2012 übertragbar. In dieser Position stellt eine Vertiefung 2079 der Rasterwelle 2011, insbesondere des Flansches 2034 der Rasterwelle 2011, sicher, dass der Kupplungsschieber 2016, insbesondere das Eingriffselement 2029, nicht mit dem Flansch 2034 der Rasterwelle 2011 kollidiert. Durch die Vertiefung 2079 ist somit stets ein Abstand zwischen Flansch 2034 und Eingriffselement 2029 sichergestellt, selbst wenn sich der Kupplungsschieber 2016 in der eingekuppelten Position befindet. Befindet sich der Kupplungsschieber 2016 jedoch in einer ausgekuppelten Position, d. h. in einer Position in der der Mitnehmer 2018 einen minimalen Abstand zu dem Antrieb 2015 aufweist, so ist kein Drehmoment von dem Grundkörper 2005 auf die Kupplungswelle 2012 übertragbar. - Die Magnete 2060 verhindern ein Kollidieren des Kupplungsschiebers 2016, insbesondere des Eingriffselements 2029 mit den Kupplungsnasen 2074, indem durch eine abstoßende Wirkung der Magnete 2060 der Kupplungswelle 2012 und der Rasterwelle 2011 verhindert wird, dass die Kupplungswelle 2012 in einer Position verharrt, bei der die Kupplungsnasen 2074 unmittelbar vor dem Kupplungsschieber 2016 angeordnet sind. Somit ist besagte Kollision zwischen Kupplungsschieber 2016 und Kupplungsnasen 2074 vermeidbar. Die Magnete 2060 sind vorteilhafterweise Scheibenmagnete mit einer Abmessung von 4x1 mm oder 3x1,5 mm.
- Die Kupplungswelle 2012 ist insbesondere ebenfalls hohl ausgebildet und weist ein Innenprofil auf, mit dem eine Adapterwelle 2046 (vgl.
Fig. 29 ) des Zylinderadapters 2003 bewegbar ist. Zur Abdeckung der Kupplungswelle 2012 zu dem Drehknauf 2001 hin ist vorgesehen, dass eine Wellenscheibe 2075 in die hohle Kupplungswelle 2012 eingepresst ist. Insbesondere liegt der Positionierdom 2068 an der Wellenscheibe 2075 an, um die Kupplungswelle 2012 axial zu fixieren. -
Fig. 21 zeigt eine Kombination ausFig. 19 undFig. 20 . Somit zeigtFig. 21 , wie die Rasterwelle 2011 und die Kupplungswelle 2012 mit dem Grundkörper 2005 verbindbar sind. - Zum Ausrichten der Rasterwelle 2011 bezüglich des Grundkörpers 2005 weist der Flansch 2034 der Rasterwelle 2011 eine Ausrichtausnehmung 2033 auf, während der Grundkörper 2005 eine Ausrichtnase 2032 aufweist. Wird die Rasterwelle 2011 mit dem Grundkörper 2005 verbunden, so greift die Ausrichtnase 2032 in die Ausrichtausnehmung 2033 ein. Somit ist zum Verbinden von Rasterwelle 2011 und Grundkörper 2005 nur eine einzige Ausrichtung von Grundkörper 2005 zur Rasterwelle 2011 möglich. Die Ausrichtnase 2032 dient auch dazu, die Kupplungswelle 2012, insbesondere die Vertiefung 2079 und die Magnete 2060 der Kupplungswelle 2012 auszurichten. Aus
Fig. 21 ist außerdem ersichtlich, dass der Flansch 2034 der Rasterwelle 2011 die erste Stirnfläche 2051 des Grundkörpers 2005 abdeckt. -
Fig. 22 zeigt den Grundkörper 2005 mit eingesetzter Rasterwelle 2011. Die Rasterwelle 2011, insbesondere der Flansch 2034 der Rasterwelle 2011, ist formschlüssig mit dem Grundkörper 2005 verbunden. Dazu ist insbesondere eine Bördelung 2076 vorgesehen, über die der Flansch 2034 der Rasterwelle 2011 an dem Grundkörper 2005 gehalten ist. -
Fig. 23 zeigt eine Schnittansicht vonFig. 22 . Hieraus ist ersichtlich, dass der Flansch 2034 der Rasterwelle 2011 unmittelbar an dem Haltering 2013 anliegt. Somit ist eine Halterung des ersten Platinenteils 2057, insbesondere in axialer Richtung, gewährleistet. Der Flansch 2034 wiederum wird durch die Bördelung 2076 an dem Grundkörper 2005 gehalten. - Auf der dem Zylinderadapter 2003 abgewandten Seite ist das zweite Platinenteil 2061 in einem Absatz 2062 des Grundkörpers 2005 angeordnet. Dies ermöglicht es, das zweite Platinenteil 2061, ebenso wie das erste Platinenteil 2057, von beiden Seiten der Platinenoberfläche zu bestücken. Somit steht eine maximale Fläche zur Bestückung mit elektrischen Komponenten zur Verfügung.
-
Fig. 24 zeigt ein einschiebbares Batteriefach 2008 für den Drehknauf 2001. In das Batteriefach 2008 ist eine Batterie 2009, insbesondere eine Tekcell CR2 Lithiumbatterie, einsetzbar, wobei die Batterie 2009 von Batteriekontanten 2039 des Batteriefachs 2008 kontaktiert ist. Alternativ zu den Batteriekontakten 2039 ist vorgesehen, dass ein Kabel des Batteriefachs 2008 unmittelbar an die Batterie 2009 angelötet ist. In jedem Fall findet eine Kontaktierung der Batterie 2009 ausschließlich über das Batteriefach 2008 statt. Das Batteriefach 2008 wiederum weist einen Batteriesteckverbinder 2040 auf, der an dem Batteriefach 2008, insbesondere spielbehaftet, angeordnet ist und durch einen seitlichen Durchbruch der Batterieausnehmung 2023 ragt, wenn das Batteriefach 2008 in die Batterieausnehmung 2023 eingeschoben ist. Der Batteriesteckverbinder 2040 ist mit den Batteriekontakten 2039 oder mit dem an die Batterie 2009 angelöteten Kabel verbunden, sodass eine elektrische Kontaktierung der Platine 2010 über den Batteriesteckverbinder 2040 erfolgt. Wie mit Bezug auf dieFig. 17 und18 beschrieben wurde, weist das erste Platinenteil 2057 einen Batteriegegensteckverbinder 2041 auf, die den Batteriesteckverbinder 2040 kontaktiert, wenn das Batteriefach 2008 in den Grundkörper 2005 des Drehknaufs 2001 eingeschoben ist. Der Batteriegegensteckverbinder 2041 ist insbesondere direkt auf dem ersten Platinenteil 2057 angeordnet. Hierbei ist der Batteriesteckverbinder 2040 als eine Kontaktbuchse ausgebildet, wobei der Batteriegegensteckverbinder 2041 als ein Stecker ausgebildet ist. Allerdings ist ebenso vorstellbar, dass der Batteriesteckverbinder 2040 ein Stecker und der Batteriegegensteckverbinder 2041 eine Kontaktbuchse ist. - Das Einschieben des Batteriefachs 2008 in den Grundkörper 2005 ist in
Fig. 25 gezeigt. Der Grundkörper 2005 weist, wie schon oben erwähnt, die Batterieausnehmung 2023 auf, die sich von einer ersten Mantelöffnung 2054 zu einer zweiten Mantelöffnung 2055 (vgl.Fig. 23 ) erstreckt und rotationsasymmetrisch ausgebildet ist. Dabei ist die Batterieausnehmung 2023 senkrecht zu der ersten Mantelöffnung 2054 und der zweiten Mantelöffnung 2055 orientiert. Dies erlaubt das Einschieben des Batteriefachs 2008 durch die erste Mantelöffnung 2054 in die Batterieausnehmung 2023, wie inFig. 25 gezeigt. Ferner ist durch die rotationsasymmetrische Ausgestaltung der Batterieausnehmung 2023 die Ausrichtung des Batteriefachs 2008 in der Batterieausnehmung 2023 in Einschieberichtung vorgegeben. Dadurch ist das Einschieben des Batteriefachs 2008 in die Batterieausnehmung 2023 vereinfacht. Zum Entfernen des Batteriefachs 2008 aus der Batterieausnehmung 2023 ist durch die zweite Mantelöffnung 2055 eine Kraft auf das Batteriefach 2008 aufbringbar, sodass das Batteriefach 2008 durch die erste Mantelöffnung 2054 aus der Batterieausnehmung 2023 entnommen werden kann. - Alternativ zu dem Entfernen des Batteriefachs 2008 durch Aufbringen einer Kraft durch die zweite Mantelöffnung 2055, kann die zweite Mantelöffnung 2055 durch einen federbelasteten Verrastmechanismus ersetzt werden. In diesem Fall weist die Mantelfläche 2020 des Grundkörpers 2005 lediglich die erste Mantelöffnung 2054 auf, durch die das Batteriefach 2008 in die Batterieausnehmung 2023 einschiebbar ist. Anschließend wird das Batteriefach 2008 federbelastet innerhalb der Batterieausnehmung 2023 verrastet, sodass durch ein Lösen der Verrastung die Federbelastung dazu verwendet werden kann, das Batteriefach 2008 aus der Batterieausnehmung 2023 wieder zu entfernen.
- Das Einschieben des Batteriefachs 2008 in die Batterieausnehmung 2023 ist durch einen Batterieanschlag 2042 begrenzt. Der Batterieanschlag 2042 liegt an einem Grundkörperanschlag 2043 an, wenn das Batteriefach 2008 vollständig in der Batterieausnehmung 2023 eingeschoben ist. Gleichzeitig wird in diesem Fall der Batteriesteckverbinder 2040 von dem Batteriegegensteckverbinder 2041 kontaktiert. Somit ist eine selbsttätige Kontaktierung vorhanden, sodass ein Monteur das Batteriefach 2008 lediglich in den Grundkörper 2005 einzuschieben braucht, um sowohl eine mechanische als auch eine elektrische Verbindung zwischen Batteriefach 2008 und Grundkörper 2005 herzustellen.
- Um die erste Mantelöffnung 2054 und/oder die zweite Mantelöffnung 2055 und damit die Batterieausnehmung 2023 des Grundkörpers 2005 abzudecken, sind unterschiedliche Möglichkeiten vorhanden. In
Fig. 25 ist gezeigt, dass der Grundkörper 2005 von einem Abdeckelement 2006 umgeben ist. Das Abdeckelement 2006 ist zusammen mit dem Grundkörper 2005 außerdem inFig. 26 gezeigt. Das Abdeckelement 2006 umgibt die Mantelfläche 2020 des Grundkörpers 2005, wobei zumindest eine Umfangsöffnung 2030 des Abdeckelements 2006 Zugriff auf die erste Mantelöffnung 2054 und/oder auf die zweite Mantelöffnung 2055 des Grundkörpers 2005 erlaubt. Dabei ist das Abdeckelement 2006 insbesondere derart ausgestaltet, dass durch eine Rotation des Abdeckelements 2006 relativ zu dem Grundkörper 2005 die erste Mantelöffnung 2054 und/oder die zweite Mantelöffnung 2055 des Grundkörpers 2005 von dem Abdeckelement 2006 verdeckt werden, d. h. die Umfangsöffnungen 2030 des Abdeckelement 2006 und die erste Mantelöffnung 2054 und/oder die zweite Mantelöffnung 2055 des Grundkörpers 2005 nicht mehr fluchtend angeordnet sind. - Das Abdeckelement 2006 dient ferner zusätzlich zum Abdecken der Bördelung 2076, sodass die Verbindung zwischen Rasterwelle 2011 und Grundkörper 2005 von dem Abdeckelement 2006 vollständig abgedeckt ist. Die Rasterwelle 2011 ist dabei durch eine Stirnöffnung 2031 des Abdeckelements 2006 geführt.
- Das Abdeckelement 2006 kann eine Rippe in axialer Richtung aufweisen, die in eine korrespondierende Ausnehmung, insbesondere Nut, eingreift. Auf diese Weise ist eine radiale Fixierung realisiert.
- Das in der Batterieausnehmung 2023 angeordnete Batteriefach 2008 ist besonders vorteilhaft durch eine Knaufkappe 2007 verdeckbar, wie sie in
Fig. 27 gezeigt ist. In diesem Fall ist die Batterieausnehmung 2023 durch die Stirnöffnungen 2030 des Abdeckelements 2006 stets freigegeben und wird lediglich durch die Knaufkappe 2007 abgedeckt. Dabei ist vorgesehen, dass die Knaufkappe 2007 ein Verbindungselement 2038 aufweist, das insbesondere als Rastnase ausgebildet ist. Mit dem Verbindungselement 2038 ist die Knaufkappe 2007 an dem Grundkörper 2005 befestigbar. Insbesondere ist vorgesehen, dass das als Rastnase ausgebildete Verbindungselement 2038 in die Batterieausnehmung 2023 eingreift und die Knaufkappe 2007 somit formschlüssig mit dem Grundkörper 2005 verbindet. Weiterhin ist vorgesehen, dass die Knaufkappe 2007 unter dem Abdeckelement 2006 angeordnet ist, d. h. näher an der Mantelfläche 2020 des Grundkörpers 2005 angeordnet ist als das Abdeckelement 2006. Über eine umlaufende Dichtung 2035 sind die Umfangsöffnungen 2030 des Abdeckelements 2006 verschließbar. Insgesamt ermöglichen somit das Abdeckelement 2006 und die Knaufkappe 2007 zusammen eine vollständige und sichere Abdeckung der Mantelfläche 2020 des Grundkörpers 2005. - Die Knaufkappe 2007 weist außerdem einen Leuchtring 2036 auf, der in einer Abdeckscheibe 2077 angeordnet ist. Der Leuchtring 2036 ist in die Knaufkappe 2007 eingeklebt. Alternativ oder zusätzlich kann der Leuchtring 2036 in die Knaufkappe 2007 eingeclipst sein. Die Abdeckscheibe 2077 deckt die zweite Stirnfläche 2052 des Grundkörpers 2005 ab. Dazu ist die Abdeckscheibe 2077 insbesondere in eine stirnseitige Öffnung der Knaufkappe 207 einsetzbar. Zur Ausgestaltung eines optisch hochwertigen Eindrucks ist außerdem vorgesehen, dass auf die Abdeckscheibe 2077 eine Logoblende 2078 aufklebbar ist. Die Logoblende 2078 verleiht daher der Knaufkappe 2007 und somit dem Drehknauf 2001 einen optisch hochwertigen Eindruck, wobei der Leuchtring 2036 rund um die Logoblende 2078 weiterhin sichtbar ist. Der Leuchtring ist insbesondere von dem zweiten Platinenteil 2061 ansteuerbar. Innerhalb der Abdeckscheibe ist insbesondere eine RFID-Antenne angeordnet, die mit dem zweiten Platinenteil 2061 elektrisch verbunden ist. Somit ist ein Auslesen von Codekarten ermöglicht. Auf dem zweiten Platinenteil 2061 ist außerdem eine Funkantenne, insbesondere eine 868 MHz-Antenne, angeordnet. Diese dient zur Kommunikation mit weiteren Komponenten, insbesondere zur Konfiguration des Drehknaufs 2001.
-
Fig. 28 zeigt den Drehknauf 2001 mit der ausFig. 27 gezeigten Knaufkappe 2007. Über Montageelemente 2037 ist sowohl das Abdeckelement 2006 als auch die Knaufkappe 2007 mit dem Grundkörper 2005 verbindbar. Dabei handelt es sich bei den Montageelementen 2037 vorteilhafterweise um Gewindestifte mit Zapfen, die durch das Abdeckelement 2006 und die Knaufkappe 2007 führbar und innerhalb des Grundkörpers 2005 verschraubbar sind. -
Fig. 29 zeigt den Zylinderadapter 2003 in einer Explosionsansicht. Der Zylinderadapter 2003 umfasst ein Schließelement 2045, mit dem ein Schließmechanismus, beispielsweise einer Tür, betätigbar ist. Der Zylinderadapter 2003 weist weiterhin Adapterwellen 2046 auf, die mit dem Schließelement 2045 verbunden sind. Wird eine der Adapterwellen 2046 rotiert, so wird auch das Schließelement 2045 rotiert, sodass durch eine Rotation der Adapterwellen 2046 der Schließmechanismus der Tür betätigbar ist. - In
Fig. 29 ist ein Doppelzylinder gezeigt, d. h. der Zylinderadapter 2003 ist von zwei Seiten betätigbar. Erfindungsgemäß ist ebenso möglich, einen Halbzylinder zu verwenden, wobei dann der in Fig. 2018 gezeigte Innenknauf 2004 nicht benötigt wird. - Die Adapterwelle 2046 ist durch eine Wellensicherung 2049 innerhalb des Zylinderadapters 2003 befestigt. Außerdem weist die Adapterwelle 2046 ein Außenprofil auf, das mit dem Innenprofil der Kupplungswelle 2012 übereinstimmt. Somit ist ein Drehmoment von der Kupplungswelle 2012 auf die Adapterwelle 2046 übertragbar. Insbesondere sind besagte Profile Sechskantprofile.
- Über die Rasterwelle 2011 ist der Drehknauf 2001 innerhalb des Zylinderadapters 2003 gelagert und gehalten. Zum Halten des Drehknaufs 2001 sind insbesondere Rastelemente 2047 vorgesehen. Die Rastelemente 2047 sind in Clipshülsen 2050 angeordnet und werden federbelastet durch eine Feder 2048 in die umlaufenden Nuten 2053 der Rasterwelle 2011 gepresst. Zum Einführen des Drehknaufs 2001 in den Zylinderadapter 2003 ist bevorzugt vorgesehen, dass die umlaufenden Nuten 2053 der Rasterwelle 2011 Abschrägungen aufweisen, sodass ein Sägezahnprofil auf der Außenseite der Rasterwelle 2011 vorhanden ist. Auf diese Weise ist der Drehknauf 2001 einfach in den Zylinderadapter 2003 einschiebbar. Zum Entfernen des Drehknaufs 2001 muss das Rastelement 2047 aus der umlaufenden Nut 2053 herausgezogen werden, was ein teilweises Entfernen des Zylinderadapters 2003 aus dem Türblatt bedingt. Somit ist eine Manipulation des erfindungsgemäßen Schließzylinders 2002 ausgeschlossen oder zumindest erschwert. Zum Entfernen werden die Rastelemente 2047 mit einem Spezialwerkzeug, insbesondere von unterhalb des Zylinderadapters 2003, gegriffen und um 90°gedreht.
- Durch das Vorsehen einer großen Anzahl von umlaufenden Nuten 2053 innerhalb der Rasterwelle 2011 ist der Drehknauf 2001 teleskopierbar, d. h. der Drehknauf 2001 kann für Zylinderadapter 2003 mit unterschiedlichen Längen verwendet werden. Durch die Einstellbarkeit des Drehknaufs 2001 kann der Drehknauf an unterschiedliche Türstärken angepasst werden.
- Der Zugang durch eine Tür muss üblicherweise lediglich von einer Seite geregelt werden, da ein Verlassen des zugangsgesicherten Bereichs meist jederzeit und jedermann möglich sein soll. Daher weist der erfindungsgemäße Schließzylinder 2002 zusätzlich einen Innenknauf 2004 auf, der in
Fig. 30 gezeigt ist. Der Innenknauf 2004 weist einen Innenknaufkörper 2080 auf, der über eine Welle-Nabe-Verbindung 2081, insbesondere durch eine Scheibfederverbindung, mit einer Innenwelle 2082 verbunden ist. Die Innenwelle 2082 weist, analog zu der Kupplungswelle 2012, ein Innenprofil auf, das mit dem Außenprofil der Adapterwellen 2046 übereinstimmt. Außerdem weist die Innenwelle 2082, analog zu der Rasterwelle 2011, umlaufende Nuten an der Außenfläche auf. Somit ist der Innenknauf 2004 auf dieselbe Art an den Zylinderadapter 2003 befestigbar wie der Drehknauf 2001. Jedoch erlaubt der Innenknauf 2004 stets das Betätigen des Zylinderadapters 2003, d. h. das Rotieren des Schließelements 2045. -
Fig. 31 zeigt die Finalzusammensetzung des Schließzylinders 2002. In dem inFig. 31 gezeigten Beispiel wird für die Betätigung des Zylinderadapters 2003 ein Drehknauf 2001 und ein Innenknauf 2004 verwendet. Alternativ ist erfindungsgemäß ebenso vorgesehen, dass zur Betätigung des Zylinderadapters 2003 zwei Drehknaufe 2001 verwendet werden können. Um einen Abstand zwischen dem Drehknauf 2001 und dem Zylinderadapter 2003 einzuhalten ist schließlich eine Distanzscheibe 2083 vorgesehen. Die Befestigung der Rasterwelle 2011 des Drehknaufs 2001 innerhalb des Zylinderadapters 2003 erfolgt dann wie in Bezug auf Fig. 297 beschrieben wurde. -
- 1
- Beschlag
- 2
- Beschlagskörper
- 3
- erstes (oberes) Blendenelement
- 4
- zweites (unteres) Blendenelement
- 5
- drittes Blendenelement, insbesondere Lichtleiter
- 6
- erstes (oberes) Abdeckelement
- 7
- zweites (unteres) Abdeckelement, insbesondere Lagerschild
- 8
- Form- und Kraftschlussmittel
- 9
- Blende
- 10
- Träger
- 11
- Lagerelement
- 12
- Schließzylinderaufnahme
- 13
- Elektronikaufnahme
- 14
- erste Türbefestigungsaufnahme, Langloch
- 15
- zweite Türbefestigungsaufnahme
- 16
- dritte Türbefestigungsaufnahme
- 17
- Mantelfläche von 11
- 18
- Verbindungselement von 11
- 19
- Trägerkörper
- 20
- Einbauelement
- 21
- Motortasche
- 22
- elektrischer Motor
- 23
- Spindel
- 24
- Kupplungselement
- 25
- Gegenkupplungselement
- 26
- Übertragungselement, insbesondere Mehrkant
- 27
- Federscheibe
- 28
- lichtdurchlässiger Bereich von 24, Durchgangsöffnung
- 29
- Mitnehmer
- 30
- Handhabe, insbesondere Türdrücker
- 31
- Griffstück
- 32
- Verbindungsstück
- 33
- Lagerhülse
- 34
- Batteriefach
- 35
- Deckel
- 36
- Metallstreifen
- 37
- erste Kabel
- 38
- zweite Kabel
- 39
- Verbindungselement von 30
- 40
- Feder
- 41
- Federschlitten
- 42
- Hebel
- 43
- Anschlagselement
- 44
- erste Lichtquelle
- 45
- zweite Lichtquelle
- 46
- erster Anschlag von 10
- 47
- zweiter Anschlag von 10
- 48
- Teil von 82, 83 in 10
- 49
- viertes Blendenelement
- 50
- Leiterkarte
- 51
- Antenne
- 52
- Leuchtmittel, LED
- 53
- erster Sensor
- 54
- zweiter Sensor
- 55
- Kollimator
- 56
- Kontrolleinheit
- 57
- Energiespeicher
- 58
- Formschlussmittel von 30
- 59
- Federelement
- 60
- Befestigungselement
- 61
- Befestigungsmittel
- 62
- Kragenelement
- 63
- Gegenkupplungselementaufnahme
- 64
- erste Lagerstelle von 43
- 65
- zweite Lagerstelle von 43
- 66
- Anschlag von 11
- 67
- Anschlag von 30
- 68
- Platine
- 70
- Lichtdurchlass von 20
- 71
- Führungsteil von 20
- 72
- Nut von 25
- 73
- Öffnung von 25
- 74
- Schutzmittel von 3
- 75
- Ausbuchtung von 50
- 76
- Türbefestigungsaufnahme
- 77
- Isolationselemente
- 78
- Öffnungen
- 79
- Schlitz von 39
- 80
- erstes Ende von 30
- 81
- Innenseite von 30
- 82
- erste Federaufnahme
- 83
- zweite Federaufnahme
- 84
- (erster) Spalt
- 85
- zweiter Spalt
- 86
- Kragen von 7
- 87
- Bereich von 86
- 88
- Bereich von 86
- 89
- Ende von 26
- 90
- Ende von 26
- 91
- elektrische Leiter
- 92
- elektrische Leiter
- 93
- Führung
- 94
- Durchlass in 11
- 95
- Begrenzungsbereich
- 96
- Formschlussmittel von 20
- 97
- Aufnahme für Form- und Kraftschlussmittel von 3 in 10
- 98
- Öffnung für einen Schließzylinder in 4
- 99
- Aufnahme in 10 für 4
- 101
- Vorderseite von 2
- 102
- Rückseite von 2
- 103
- erste, obere Seitenfläche von 2
- 104
- zweite, seitliche Seitenfläche von 2
- 105
- dritte, seitliche Seitenfläche von 2
- 106
- vierte, untere Seitenfläche von 2
- 111
- Frontseite von 10
- 112
- Hinterseite von 10
- 113
- Seite von 10
- 114
- Seite von 10
- 115
- Seite von 10
- 116
- Seite von 10
- 118
- Durchgangsöffnung in 20
- 120
- Achse
- I
- Betriebsposition, Ruheposition
- II
- Betriebsposition, Betätigungsposition
- III
- Montageposition
- V
- linksgerichtete Ausrichtung von 30
- VI
- rechtsgerichtete Ausrichtung von 30
- X
- eingekuppelte Position von 24
- XI
- ausgekuppelte Position von 24
- XII
- Zwischenposition von 24
- AW
- Winkel den Positionen von 43 bei Anliegen an 46 und 47
- BW
- Winkel zwischen der Ruheposition und der Betätigungsposition
- KG
- Abstand zwischen dem Kupplungselement und dem Gegenkupplungselement
- HF
- Winkel Feder und Hebel
- HA
- Winkel zwischen Feder und Anschlagelement
- LW
- Auslenkwinkel von 26
- LE
- Längsebene
- ZW
- Verzahnungswinkel
- ÜZ
- Verzahnungswinkel
- ZI
- Zeitintervall
- RZ
- Reduktionszeit
- PI
- Pausenintervall
- AE
- Anzahl an Einkupplungsvorgängen
- AV1
- Anzahl an Auskupplungsvorgängen
- AV2
- Anzahl an Auskupplungsvorgängen
- 2001
- Drehknauf
- 2002
- Schließzylinder
- 2003
- Zylinderadapter
- 2004
- Innenknauf
- 2005
- Grundkörper
- 2006
- Abdeckelement
- 2007
- Knaufkappe
- 2008
- Batteriefach
- 2009
- Batterie
- 2010
- Platine
- 2011
- Rasterwelle
- 2012
- Kupplungswelle
- 2013
- Haltering
- 2014
- Antriebstasche
- 2015
- Antrieb
- 2016
- Kupplungsschieber
- 2017
- Gewindespindel
- 2018
- Mitnehmer
- 2019
- Antriebssteckverbinder
- 2020
- Mantelfläche (Grundkörper)
- 2021
- erste Halterung (für Antriebstasche)
- 2022
- zweite Halterung (für Kupplungsschieber)
- 2023
- Batterieausnehmung
- 2024
- Clipsnase
- 2025
- Antriebstaschenanschlag
- 2026
- Antriebssteckverbinderhalter
- 2027
- erste Kupplungschieberausnehmung
- 2028
- zweite Kupplungschieberausnehmung
- 2029
- Eingriffselement (Kupplungsschieber)
- 2030
- Umfangsöffnung (Abdeckelement)
- 2031
- Stirnöffnung (Abdeckelement)
- 2032
- Ausrichtnase
- 2033
- Ausrichtausnehmung
- 2034
- Flansch
- 2035
- Dichtung
- 2036
- Leuchtring
- 2037
- Montageelement (für Abdeckelement und Knaufkappe)
- 2038
- Verbindungselement (Rastnase) (bei Knaufkappe)
- 2039
- Batteriekontakte
- 2040
- Batteriesteckverbinder
- 2041
- Batteriegegensteckverbinder (für Batteriesteckverbinder)
- 2042
- Batteriefachanschlag
- 2043
- Grundkörperanschlag
- 2044
- Schließzylindergehäuse
- 2045
- Schließelement
- 2046
- Adapterwelle
- 2047
- Rastelement
- 2048
- Feder
- 2049
- Wellensicherung
- 2050
- Clipshülse
- 2051
- erste Stirnfläche (Grundkörper)
- 2052
- zweite Stirnfläche (Grundkörper)
- 2053
- umlaufende Nut (Rasterwelle)
- 2054
- erste Mantelöffnung (Grundkörper)
- 2055
- zweite Mantelöffnung (Grundkörper)
- 2056
- Antriebsgegensteckverbinder (auf Platine/ 1. Platinenteil)
- 2057
- erstes Platinenteil
- 2058
- Ausnehmung (1. Platinenteil)
- 2059
- Aussparung (Rasterwelle)
- 2060
- Magnet
- 2061
- zweites Platinenteil
- 2062
- Absatz (Grundkörper)
- 2063
- zweites Verbindungselement
- 2064
- Ausnehmung (Grundkörper)
- 2065
- Kuppeleinheit
- 2066
- Verbindungsteil
- 2067
- Mittelbohrung
- 2068
- Positionierdom
- 2069
- erster Sensor
- 2070
- zweiter Sensor
- 2071
- Steg
- 2072
- Befestigungsmittel
- 2073
- Magnetausnehmung
- 2074
- Kupplungsnase
- 2075
- Wellenscheibe
- 2076
- Bördelung
- 2077
- Abdeckscheibe
- 2078
- Logoblende
- 2079
- Vertiefung
- 2080
- Innenknaufkörper
- 2081
- Welle-Nabe-Verbindung
- 2082
- Innenwelle
- 2083
- Scheibe
- 2084
- Anschlag (Kupplungswelle)
- 2100
- Längsachse (Grundkörper)
- 2200
- Abstand
Claims (15)
- Elektromechanisches Zugangskontrollsystem (1) für eine Gebäudetür, mit einem Kupplungselement (24),
mit einem Gegenkupplungselement (25),
wobei das Kupplungselement (24) sich in einer eingekuppelten Position (X) in Wirkverbindung mit dem Gegenkupplungselement (25) und in einer ausgekuppelten Position (XI) außer Wirkverbindung mit dem Gegenkupplungselement (25) befindet,
und mit einem Antrieb (22), insbesondere einen elektrischen Motor, der das Kupplungselement (24) zwischen der eingekuppelten Position (X) und der ausgekuppelten Position (XI) bewegt,
dadurch gekennzeichnet,
dass das Zugangskontrollsystem (1) zumindest einen Sensor (53, 54) zur Kennzeichnung zumindest einer Position des Kupplungselementes (24) und eine Kontrolleinheit (56) aufweist, die den Antrieb (22) in Abhängigkeit von einem an die Kontrolleinheit (56) übermittelten Signal des Sensors (53, 54) steuert und/oder regelt. - Zugangskontrollsystem (1) nach Anspruch 1,
dadurch gekennzeichnet, dass mindestens ein erster Sensor (53) und ein zweiter Sensor (54) vorhanden sind, die für die eingekuppelte Position (X) und für die ausgekuppelte Position (XI) jeweils ein Signal an die Kontrolleinheit übermitteln, wobei insbesondere sich das Signal des ersten Sensors (53) für die eingekuppelte Position (X) von dem Signal des zweiten Sensors (54) für die eingekuppelte Position (X) und/oder sich das Signal des ersten Sensors (53) für die ausgekuppelte Position (XI) von dem Signal des zweiten Sensors (54) für die ausgekuppelte Position (XI) unterscheidet. - Zugangskontrollsystem (1) nach Anspruch 1 oder 2,
dadurch gekennzeichnet, dass der mindestens eine Sensor (53, 54), insbesondere der erste und der zweite Sensor (53, 54), als ein Lichtsensor ausgebildet sind, wobei insbesondere das Kupplungselement (24) einen lichtdurchlässigen Bereich (28) zum Durchlassen eines Lichts für den Sensor (53, 54) aufweist. - Zugangskontrollsystem (1) nach einem der vorhergehenden Ansprüche,
dadurch gekennzeichnet, dass das Kupplungselement (24) sowohl in der eingekuppelten Position (X) als auch in der ausgekuppelten Position (XI) mit einem Betätigungselement, insbesondere einer Handhabe (30), mitdrehbar ist, wobei der Sensor (53, 54) in der eingekuppelten und/oder im ausgekuppelten Position (X, XI) unabhängig von der Position (I, II) des Betätigungselementes dasselbe Signal an die Kontrolleinheit (56) übermittelt. - Verfahren zur Steuerung und/oder Regelung eines Antriebs (22), insbesondere eines elektrischen Motors, eines elektromechanischen Zugangkontrollsystems (1) für eine Gebäudetür,
wobei der Antrieb (22) dazu dient, ein Kupplungselement (24) zwischen einer eingekuppelten Position (X), in der das Kupplungselement sich in Wirkverbindung mit einem Gegenkupplungselement (25) befindet, und einer ausgekuppelten Position (XI), in der sich das Kupplungselement (24) außer Wirkverbindung mit dem Gegenkupplungselement (25) befindet, zu bewegen,
aufweisend die folgenden Schritte:d. Erzeugen eines Signals, das zumindest eine Position des Kupplungselementes (24) kennzeichnet, durch zumindest einen Sensor (53, 54),e. Übermitteln des Signals des Sensors (53, 54) an eine Kontrolleinheit (56),f. Steuern und/Regeln des Antriebs (22) durch die Kontrolleinheit (56) in Abhängigkeit von dem Signal des Sensors (53, 54). - Verfahren nach Anspruch 5,
dadurch gekennzeichnet, dass die Kontrolleinheit (56) eine Zeit erfasst und den Antrieb (22) in Abhängigkeit von der Zeit steuert und/oder regelt. - Verfahren nach Anspruch 5 oder 6,
dadurch gekennzeichnet, dass die Kontrolleinheit (56) sowohl einen Einkupplungsvorgang, bei dem versucht wird, das Kupplungselement (24) in die eingekuppelte Position (X) zu bewegen, als auch einen Auskupplungsvorgang, bei dem versucht wird, das Kupplungselement (24) aus der eingekuppelten Position (X) zu bewegen, anhand des Signals des Sensors (53, 54) steuert und/oder regelt. - Verfahren nach einem der Ansprüche 5 bis 7,
dadurch gekennzeichnet, dass die Kontrolleinheit (56) den Antrieb (22) in Abhängigkeit von dem übermittelten Signal des Sensors (53, 54) startet und/oder anhält. - Verfahren nach einem der Ansprüche 5 bis 8,
dadurch gekennzeichnet, dass die Kontrolleinheit (56) den Antrieb (22) anhält, wenn die Kontrolleinheit (56) anhand des Signals des Sensors (53, 54) feststellt, dass die zu erreichende Position (X, XI) des Kupplungselementes (24) erreicht worden ist, insbesondere unabhängig von einem festgelegten Zeitintervall zum Erreichen der zu erreichenden Position (X, XI). - Verfahren nach einem der Ansprüche 5 bis 9,
dadurch gekennzeichnet, dass die Kontrolleinheit (56) den Antrieb (22) anhält, wenn nach einem festgelegten Zeitintervall die Kontrolleinheit (56) anhand des Signals des Sensors (53, 54) feststellt, dass die zu erreichende Position (X, XI) des Kupplungselementes (24) nicht erreicht wurde. - Verfahren nach Anspruch 10,
dadurch gekennzeichnet, dass, nachdem die Kontrolleinheit (56) den Antrieb (22) aufgrund des Nicht Erreichens der zu erreichenden Position (X, XI) des Kupplungselementes (24) angehalten hat, die Kontrolleinheit (56) den Antrieb (22) nach einem festgelegten Pausenintervalls erneut startet, insbesondere um die zu erreichende Position (X, XI) zu erreichen. - Verfahren nach Anspruch 11,
dadurch gekennzeichnet, dass in der Kontrolleinheit (56) zumindest eine festgelegte Anzahl von erneuten Starts des Antriebs (22) hinterlegt ist, um nach einem Pausenintervall die zu erreichende Position (X, XI) des Kupplungselementes (24) zu erreichen. - Verfahren nach einem der Ansprüche 5 bis 12,
dadurch gekennzeichnet, dass die Kontrolleinheit (56) die elektrische Leistung für den Antrieb (22) während eines Kupplungsvorgangs variiert, insbesondere reduziert. - Verfahren nach einem der Ansprüche 5 bis 13,
dadurch gekennzeichnet, dass die Kontrolleinheit (56) die elektrische Leistung des Antriebs (22) bei Start des Antriebs (22), wenn sich das Kupplungselement (24) in einer Zwischenposition (XII) befindet, geringer wählt als die elektrische Leistung des Antriebs (22) bei Start des Antriebs (22), wenn sich das Kupplungselement (24) in der eingekuppelten und/oder ausgekuppelten Position (X, XI) befindet. - Verfahren nach einem der Ansprüche 5 bis 14,
dadurch gekennzeichnet, dass das Zeitintervall für einen Einkupplungsvorgang aus der ausgekuppelten Position (XI) größer gewählt ist als das Zeitintervall für einen Einkupplungsvorgang aus der Zwischenposition (XII) und/oder als das Zeitintervall für einen Auskupplungsvorgang.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14185845.6A EP2998480B1 (de) | 2014-09-22 | 2014-09-22 | Elektromechanisches Zugangskontrollsystem und Verfahren |
| DE102015109914.4A DE102015109914A1 (de) | 2014-09-22 | 2015-06-19 | Elektromechanisches Zugangskontrollsystem und Verfahren |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14185845.6A EP2998480B1 (de) | 2014-09-22 | 2014-09-22 | Elektromechanisches Zugangskontrollsystem und Verfahren |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2998480A1 true EP2998480A1 (de) | 2016-03-23 |
| EP2998480B1 EP2998480B1 (de) | 2019-05-15 |
Family
ID=51589154
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14185845.6A Active EP2998480B1 (de) | 2014-09-22 | 2014-09-22 | Elektromechanisches Zugangskontrollsystem und Verfahren |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2998480B1 (de) |
| DE (1) | DE102015109914A1 (de) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106050001A (zh) * | 2016-06-03 | 2016-10-26 | 珠海优特电力科技股份有限公司 | 一种磁控锁、解锁装置及锁芯 |
| CN106869608A (zh) * | 2017-02-24 | 2017-06-20 | 成都熠州科技有限公司 | 隔离型电子锁驱动结构 |
| CN113833365A (zh) * | 2021-09-23 | 2021-12-24 | 江苏安威士智能安防有限公司 | 一种机电智能门执手 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1996041486A1 (en) * | 1995-06-07 | 1996-12-19 | Master Lock Company | Remotely-operated self-contained electronic lock security system assembly |
| WO2005001224A1 (de) * | 2003-06-23 | 2005-01-06 | Buga Technologies Gmbh | Elektromechanischer schliesszylinder |
| FR2900774A3 (fr) * | 2006-05-02 | 2007-11-09 | Wfe Technology Corp | Element moteur pour serrure electrique |
| US20100012454A1 (en) * | 2008-07-15 | 2010-01-21 | Imedio Ocana Juan | Clutch mechanism applicable to electromechanical cylinders for locks |
| DE102012020451A1 (de) * | 2012-10-17 | 2014-04-17 | Dorma Gmbh + Co. Kg | System mit Türbetätigungsteil und Schließzylinder |
| EP2754794A2 (de) * | 2013-01-11 | 2014-07-16 | Carl Fuhr GmbH & Co. KG | Kupplungsvorrichtung |
-
2014
- 2014-09-22 EP EP14185845.6A patent/EP2998480B1/de active Active
-
2015
- 2015-06-19 DE DE102015109914.4A patent/DE102015109914A1/de not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1996041486A1 (en) * | 1995-06-07 | 1996-12-19 | Master Lock Company | Remotely-operated self-contained electronic lock security system assembly |
| WO2005001224A1 (de) * | 2003-06-23 | 2005-01-06 | Buga Technologies Gmbh | Elektromechanischer schliesszylinder |
| FR2900774A3 (fr) * | 2006-05-02 | 2007-11-09 | Wfe Technology Corp | Element moteur pour serrure electrique |
| US20100012454A1 (en) * | 2008-07-15 | 2010-01-21 | Imedio Ocana Juan | Clutch mechanism applicable to electromechanical cylinders for locks |
| DE102012020451A1 (de) * | 2012-10-17 | 2014-04-17 | Dorma Gmbh + Co. Kg | System mit Türbetätigungsteil und Schließzylinder |
| EP2754794A2 (de) * | 2013-01-11 | 2014-07-16 | Carl Fuhr GmbH & Co. KG | Kupplungsvorrichtung |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106050001A (zh) * | 2016-06-03 | 2016-10-26 | 珠海优特电力科技股份有限公司 | 一种磁控锁、解锁装置及锁芯 |
| CN106050001B (zh) * | 2016-06-03 | 2018-03-16 | 珠海优特物联科技有限公司 | 一种磁控锁、解锁装置及锁芯 |
| CN106869608A (zh) * | 2017-02-24 | 2017-06-20 | 成都熠州科技有限公司 | 隔离型电子锁驱动结构 |
| CN113833365A (zh) * | 2021-09-23 | 2021-12-24 | 江苏安威士智能安防有限公司 | 一种机电智能门执手 |
| CN113833365B (zh) * | 2021-09-23 | 2024-01-26 | 江苏安威士智能安防有限公司 | 一种机电智能门执手 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2998480B1 (de) | 2019-05-15 |
| DE102015109914A1 (de) | 2016-03-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2668062B1 (de) | Verriegelungsvorrichtung, insbesondere für einen stecker | |
| DE10029007B4 (de) | Sperrvorrichtung und Sperrsystem | |
| DE10029008C2 (de) | Verriegelungsvorrichtung | |
| EP2998484B1 (de) | Beschlag für eine gebäudetür | |
| DE102010018243B4 (de) | Schließzylinderanordnung | |
| EP2998483A1 (de) | Drehknauf zum Betätigen eines Zylinderadapters eines Schließzylinders | |
| EP2998480B1 (de) | Elektromechanisches Zugangskontrollsystem und Verfahren | |
| DE102008018906A1 (de) | Schließzylinderanordnung | |
| EP2998485A1 (de) | Drehknauf zum betätigen eines zylinderadapters eines schliesszylinders | |
| EP2998470B1 (de) | Beschlag für eine gebäudetür | |
| EP2998481B1 (de) | Elektromechanisches Zugangskontrollsystem | |
| WO2020064774A1 (de) | Zutrittsystem | |
| EP2998466B1 (de) | Beschlag für eine Gebäudetür | |
| EP2998463B1 (de) | Beschlag für eine gebäudetür und verfahren | |
| EP2998465B1 (de) | Beschlag für eine gebäudetür und ein verfahren hierfür | |
| DE102010014207A1 (de) | Schlüsselvorrichtung | |
| EP2998479B1 (de) | Beschlag für eine Gebäudetür mit einer Handhabe | |
| EP2998486A1 (de) | Drehknauf zum betätigen eines zylinderadapters eines schliesszylinders | |
| EP2998469B1 (de) | Beschlag für eine gebäudetür | |
| EP2998464B1 (de) | Beschlag für eine Gebäudetür | |
| DE102018123060A1 (de) | Verschlusselement und Rohrtresor mit einem solchen Verschlusselement | |
| EP2998482A1 (de) | Drehknauf zum Betätigen eines Zylinderadapters eines Schließzylinders | |
| EP2998468B1 (de) | Beschlagskörper für einen Beschlag und Verfahren | |
| DE102015111943A1 (de) | Drehknauf zum Betätigen eines Zylinderadapters eines Schließzylinders | |
| EP1387784A1 (de) | Schlüssellose motorstartberechtigungskontrolleinrichtung für kraftfahrzeuge |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20160922 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: DORMAKABA DEUTSCHLAND GMBH |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20180917 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E05B 47/06 20060101AFI20190123BHEP Ipc: E05B 47/00 20060101ALN20190123BHEP Ipc: E05B 15/00 20060101ALN20190123BHEP Ipc: E05B 3/06 20060101ALN20190123BHEP Ipc: E05B 17/10 20060101ALN20190123BHEP Ipc: E05B 15/02 20060101ALN20190123BHEP Ipc: E05B 63/04 20060101ALN20190123BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20190208 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502014011708 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20190515 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190915 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190815 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190816 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190815 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502014011708 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 |
|
| 26N | No opposition filed |
Effective date: 20200218 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190922 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190922 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20190922 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190922 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1133617 Country of ref document: AT Kind code of ref document: T Effective date: 20190922 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190922 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190915 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140922 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190515 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240918 Year of fee payment: 11 |