EP2674384B1 - Procédé de surveillance de la sécurité d'une grue et grue - Google Patents
Procédé de surveillance de la sécurité d'une grue et grue Download PDFInfo
- Publication number
- EP2674384B1 EP2674384B1 EP13002979.6A EP13002979A EP2674384B1 EP 2674384 B1 EP2674384 B1 EP 2674384B1 EP 13002979 A EP13002979 A EP 13002979A EP 2674384 B1 EP2674384 B1 EP 2674384B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- crane
- load
- bearing load
- accordance
- admissible
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 67
- 238000012544 monitoring process Methods 0.000 title claims description 37
- 238000004364 calculation method Methods 0.000 claims description 25
- 230000001419 dependent effect Effects 0.000 claims description 23
- 238000012986 modification Methods 0.000 claims description 9
- 230000004048 modification Effects 0.000 claims description 9
- 230000000694 effects Effects 0.000 claims description 3
- 230000003247 decreasing effect Effects 0.000 claims 2
- 238000012795 verification Methods 0.000 claims 2
- 238000012360 testing method Methods 0.000 description 9
- 230000008859 change Effects 0.000 description 8
- 238000012806 monitoring device Methods 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 238000009826 distribution Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 231100000136 action limit Toxicity 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 230000002045 lasting effect Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
- B66C23/90—Devices for indicating or limiting lifting moment
- B66C23/905—Devices for indicating or limiting lifting moment electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
Definitions
- the invention relates to a method for monitoring the crane safety of a crane and a crane with a variable support base.
- the monitoring process is carried out automatically by an implemented crane control, in particular the load torque limitation of the crane. Monitoring events can indicate and possibly lead to intervention in the crane movement.
- load-bearing tables are calculated in advance for all the criteria mentioned, the table entries of which define the maximum permissible load-bearing capacities for specific crane configurations.
- the DE 10 2005 035 460 A1 suggests taking individual support points for certain crane states from the existing load capacity tables and using interpolation to determine the current maximum load capacity based on these support values.
- the certain permissible payload is subject to a certain inaccuracy, which may lead to a noticeable loss of the maximum payload.
- crane movements can only be carried out if they are within the permissible load range. However, if the crane has been driven into an inadmissible area, the load torque limiter interrupts the current crane movement and blocks all further crane movements.
- DE102005059768A1 discloses a method according to the preamble of claim 1 for operating a crane with a monitoring unit and a sensor system.
- the object of the present invention is to further develop a method known from the prior art for overload protection on cranes.
- a method for operating a crane with a monitoring unit is proposed, the monitoring unit calculating a permissible load which is dependent on one or more changeable parameters during crane operation.
- the method according to the invention does not require any or no complete payload table.
- the calculation is carried out during crane operation on the crane, preferably according to the method according to one of Claims 5 to 12.
- the current changeable parameter (s) are arbitrary.
- One or more parameters characterize, for example, the current crane configuration or executed crane movements or activities.
- the parameter can be a parameter relating to the position of the crane or a crane component.
- At least one parameter can be the boom length, the boom angle, the direct ballast radius and / or the angle of rotation the turntable act. As stated, these are examples; of course, other parameters are also conceivable.
- a sensor system that records the current changeable parameters during crane operation and makes them available to the monitoring unit. According to the invention it is provided that one or more sensor values are modified before the calculation of the permissible load. In this way it is possible to determine the permissible load for one or more future parameters.
- the method according to the invention consequently allows a predictive calculation of the possible permissible load for future crane movements.
- the crane's monitoring unit thus calculates in real time on the crane and at any time which permissible load capacities will occur in the near future if the current crane movements are continued.
- extensive prognoses can be made for the development of the future permissible load capacity depending on current and future crane activities. This procedure can be particularly necessary if there are no fixed limit values, i.e. load tables, for crane monitoring.
- the crane preferably always calculates, in parallel with the method according to one of claims 5 to 12, a forecast of how the permissible load will change if the current actual movement or currently possible crane movement is continued.
- the method according to the invention does not require a comprehensive expansion of an existing crane or a monitoring unit. Rather, minor modifications are sufficient to adapt existing systems for carrying out the method. Means for manipulating the recorded sensor values only need to be provided.
- the monitoring unit changes at least one parameter as a function of the calculated permissible load capacity during crane operation in order to control the permissible load capacity.
- the speed of the parameter change can be reduced or stopped continuously or in steps, before a parameter value is reached at which the permissible one Load corresponds to the actual load.
- the monitoring unit reacts as soon as the payload changes towards zero.
- a pending crane movement can be slowed down or stopped in good time in order to avoid exceeding the permissible load.
- an output or display of a possible overshoot or an approach to a possible overshoot to the crane operator can take place.
- the desired target movement of the crane is permitted, restricted or completely blocked.
- An essential feature here is the steepness of the change in the permissible load. This calculation is carried out using all relevant sensors.
- the reduction can take place continuously or in stages.
- the speed can be reduced, for example, in such a way that it is gradually reduced to zero when or before the correspondence between the permissible and actual payload is reached, from a value that is lower than the other rate of change, or that the value zero is reached by continuously reducing the speed.
- the speed of the parameter change from a difference between the actual and permissible payload, i.e. H. is reduced continuously or gradually over a certain remaining distance.
- This difference can assume a constant value or a value that depends on the actual and / or permissible load or the difference thereof or the ratio of this difference to the actual and / or permissible load.
- At least one sensor value is checked by targeted modification, which Parameter change or parameter changes lead to a decrease in the actual load capacity and / or an increase in the permissible load capacity if the crane is already in an impermissible operating range, ie the current load capacity exceeds or corresponds to a permissible load capacity.
- the method shows preferred crane movements that enable particularly fast and safe driving out of the prohibited area.
- any crane movement is stopped or limited as soon as the current payload exceeds or corresponds to the permissible payload.
- the crane operator is then given one or more possible parameter changes, i. H. Crane movements made available for selection in order to be able to safely and reliably move the crane out of the prohibited area.
- the crane preferably comprises a variable support base.
- the support base is determined from the extended or unfolded state of the support device.
- the monitoring unit monitors several safety criteria during crane operation to ensure crane safety.
- the individual safety criteria can relate, for example, to component strength, component loading and the stability of the crane.
- this includes tilting the crane in the load direction, tilting the crane in the counter-load direction, breaking the hoist rope, component strength of the boom system, wind speed, load limits of the undercarriage, strength of the load hook, slewing ring load, luffing cylinder strength, Strength of the mechanical connections as well as the intended angle of rotation of the superstructure with boom to be used during crane operation.
- Specified calculation examples for the monitoring of individual criteria are, for example, the small test load, the large test load, load breakdown, tilt angle, tilting backwards without a load and a total of far more than 30 criteria.
- Individual criteria can be specified in the corresponding DIN standard, for example.
- a criterion is dependent on at least one parameter relating to the crane configuration and / or crane movement during crane operation as soon as the actual crane configuration at the place of use or during crane operation has an influence on compliance with the criterion.
- this also includes every crane movement that has an influence on a corresponding criterion. For example the current boom positions, the support base, the uppercarriage rotation angle, etc.
- At least one specific limit value represents the permissible specific load capacity up to which a corresponding criterion is complied with and crane safety is not endangered.
- the individual specific limit values or permissible specific load capacities can be monitored separately during crane operation and compared with the actual crane condition values. Alternatively or additionally, it can be advantageous to determine a common permissible load from the individual permissible specific limit values or loads. In this case a common maximum permissible load is determined for each crane condition or crane configuration.
- the maximum possible load capacity results in every situation, which results from the criteria for the current situation.
- the criteria that are no longer precalculated are calculated on the crane during runtime, that is, during crane operation.
- the execution of the method according to the invention now leads to a method or a monitoring device that can use any support base, d. H. allows any position of the support bars and is monitored at the same time. So far, any position was mechanically possible, but this was not safeguarded by the monitoring device for every case.
- the individual criteria are divided into at least two different types of criteria for the calculation of the joint permissible load.
- the individual criteria are divided into linearly dependent and linearly independent types of criteria.
- Linearly dependent preferably means that such a criterion depends on at least one further criterion.
- at least one linearly dependent criterion can be dependent on at least one calculated specific limit value / load capacity of at least one further linearly dependent and / or linearly independent criterion.
- a particularly advantageous embodiment of the method results from the fact that in a first step the permissible specific load is calculated for each linearly independent criterion. From the amount of specific loads for the linearly independent criteria, the minimum of these loads is then determined. The permissible load of the linearly dependent criteria is determined by iteration. It is conceivable that the iteration with the minimum of the permissible Loads of the linearly independent criteria begins and a minimum of the loads of the linearly dependent criteria is determined, which at the same time corresponds to the common permissible load for the crane.
- the stored load capacity tables are, however, exclusively those which are not dependent on a parameter relating to the crane configuration and / or crane movement during crane operation.
- all criteria that are dependent on at least one parameter relating to the crane configuration during crane operation are excluded. Consequently, mainly strength-relevant load capacity restrictions are stored on the crane as precalculated load capacity tables. These contain limit values, compliance with which avoids lasting damage to the crane through mechanical overload, for example through load acceptance.
- an integrated crane operation planner is used for diverse crane monitoring during crane operation.
- the crane planner preferably uses stored limit curves or envelope curves for at least some of the crane parameters. Accordingly, there are two independent crane monitoring methods, on the one hand to ensure the redundancy of the monitoring and on the other hand to check the functionality of the overall system in each case by the two monitoring methods provided independently of one another checking the functionality of the other monitoring method. In this context, the DE 10 2008 021 627 taken.
- the invention also relates to a crane with a monitoring unit and a sensor system.
- the crane carries out the above-described method according to the invention or an advantageous embodiment of the method according to the invention.
- the advantages and properties of the crane obviously correspond to those of the method according to the invention, which is why a renewed description is dispensed with at this point.
- the invention also relates to a crane monitoring unit, in particular a load torque limiter, for the aforementioned crane for carrying out the method according to the invention or an advantageous embodiment of the Procedure.
- Another aspect of the invention relates to a data carrier with stored software for execution on the aforementioned crane monitoring unit, comprising commands that cause the aforementioned crane to carry out the method steps according to the invention.
- the advantages and properties of the crane monitoring unit or the data carrier obviously correspond to those of the method according to the invention, which is why a repetitive description is dispensed with here too.
- the Figures 1 to 8 show the distribution of the permissible load capacity of a crane as a function of its radius or the slewing angle of the superstructure.
- the crane sketched in the center comprises an undercarriage, an uppercarriage rotatably mounted on the undercarriage and a variable support.
- the variable support comprises a total of four sliding bars that can be extended into different support positions.
- a luffing crane boom that can be telescoped is arranged on the superstructure can be designed.
- the current load depends on the rotation angle of the superstructure and the load radius, ie the luffing angle of the boom.
- a monitoring device on the crane monitors compliance with the permissible load capacity during crane operation.
- any desired position of the support bars is not only permitted by the method according to the invention but also monitored by the monitoring device at the same time.
- the criteria are divided into different, ie at least two different types of calculation.
- a linearly independent calculation type applies to the calculation of the large test load.
- the tipping load represents the load at which the crane tilts.
- Hdyn characterizes the dynamic lifting load coefficient.
- W introduces the wind influence into the calculation, which is calculated taking the load into account.
- the small test load is therefore dependent on the calculated load capacity of at least one criterion, which is referred to as linearly dependent. It is also conceivable that the calculation is recursive. For the calculation of the wind influence, for example, 1.2 m 2 of wind attack area per 1 t of load is assumed.
- the algorithm for the calculation divides the criteria into linearly dependent and linearly independent criteria.
- the permissible load is determined for each linearly independent criterion.
- the minimum of these TL criteriaA of these payloads is determined and recorded.
- a second method step an iteration of the permissible load capacity is carried out with the previously determined minimum TL CriteriaA as the starting value.
- the linearly dependent criterion is checked for admissibility in each step. If the criterion is admissible, the next criterion is used. As soon as a criterion is no longer permissible, the next iteration step in jumped to the relevant criterion without carrying out a further check of the other criteria.
- the second step is started again with this new load TL. This continues until the second step provides a permissible load TL CriteriaB for all criteria. This becomes the permissible maximum load TL.
- the method according to the invention is intended to provide the largest possible value for the permissible load TL.
- the determination of the load TL can also be carried out with the help of the continued bisection.
- the scale on the right edge of the image assigns the corresponding load values to the gray values.
- the crane configurations of the Figures 1 and 5 , 2 and 6 , 3 and 7th such as 4th and 8th are identical in each case and are used for comparison.
- three telescopic sections of the boom system are 46% extended.
- the sliding bars of the support are in the crane configuration according to Figures 1 and 5 fully extended and allow a maximum support base.
- the configuration of the Figures 2 and 6 provides, on the other hand, to operate the crane without support and to leave the sliding bars fully retracted.
- the crane according to the Figures 3 and 7th works with limited support, whereby two sliding bars on one side of the crane are fully extended and the opposite bars are fully retracted.
- the crane configuration of the Figures 4 and 8th provides a crane operation with three fully extended and one retracted sliding beam.
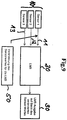
- the illustrated system of Figure 9 shows a load moment limiter 20 which monitors all crane movements with regard to their safety during crane operation and, if necessary, triggers a safety shutdown or restriction of the permissible crane movement.
- This system can according to the embodiment described above Figures 5 to 8 be carried out and carry out the presented method according to the invention.
- the following method represents an extension of this method. However, this is not a mandatory requirement for the execution of the following method steps, which are independent of the method according to the Figures 5 to 8 are executable.
- the load torque limiter 20 receives measured values from a large number of sensors 10 during crane operation, which values characterize individual parameters during crane operation. It should be noted that Figure 9 shows a number of three sensors merely by way of example. In a realistic environment, however, the system is based on a large number of sensors, the number of which is not limited.
- the individual measured values of the sensors 10 characterize, for example, the angle of rotation, luffing angle or also cylinder pressure of the luffing cylinder of the crane;
- the load moment limiter calculates the permissible load for the current crane condition.
- the permissible range is characterized by the fact that the current load capacity of the crane is lower than the permissible load capacity in the current operating state. If the current load exceeds the permissible value, the crane is working in the non-permissible range.
- the aim of the method according to the invention is to ensure that the load torque limitation triggers an early braking of the crane movement before entering a non-permissible work area.
- a restricted crane movement in the non-permissible range is to be made possible under certain circumstances and the safety of the crane is nevertheless to be monitored by means of the load moment limitation.
- the sensor values 11, 12, 13 for the calculation of the forecast of the permissible payload are specifically changed in suitably selected steps.
- the sensor value 11 of the sensor 1 is manipulated in order to be able to calculate the permissible load for this future parameter, ie the future actual value of the sensor 1.
- the load moment limiter 20 calculates the permissibility of the crane movement for the changed sensor values and can therefore estimate when the crane will be steered into a non-permissible range while maintaining the current crane movement.
- Each existing system of sensors 10 and load torque limiter 20 can be expanded by integrating the means 50 in order to be able to carry out a targeted manipulation of at least one sensor value 11.
- the load moment limiter 20 thus calculates in real time on the crane and at any time which permissible loads will occur in the near future if the current crane movement is continued. With the help of the forecast development of the payload, the load torque limiter can recognize at an early stage whether the permissible payload converges to the value zero. In this case, the crane movement can be slowed down or stopped completely in good time. It is also possible to issue a corresponding warning to the crane operator.
- the method according to the invention enables a restricted crane movement in the non-permissible range, which simultaneously from the load torque limiter 20 is monitored.
- the load torque limiter 20 has the task of stopping a crane movement well before actual malfunctions or an accident occur. Operation in the non-permissible range does not mean an acute dangerous situation, but merely the exceeding of a specially defined limit value.
- the flow chart of the Figure 10 shows the method according to the invention for checking permissible crane movements in the non-permissible range.
- the state 200 characterizes the regular crane operation, the crane movement is carried out unhindered in method step 110 and continuously monitored by the load torque limiter 20 in block 120 for compliance with the permissible load.
- the crane movement can be slowed down or stopped completely in good time. If such an emergency stop has taken place, the load torque limiter 20 goes to method step 200.
- the load torque limiter 20 goes to method step 200.
- it is determined with which crane movements or movements the crane can safely be driven out of the non-permissible area again.
- a possible selection is also displayed to the operator. The crane operator can therefore choose the most favorable variant depending on the situation.
- step 300 the release of the selected crane movement is checked. This ensures that only the crane movements released by the load torque limiter and displayed in step 200 are carried out and other crane movements are blocked.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Jib Cranes (AREA)
- Control And Safety Of Cranes (AREA)
Claims (16)
- Procédé de fonctionnement d'une grue avec une unité de surveillance, qui calcule, pendant le fonctionnement de la grue, une capacité de charge admissible dépendante d'un ou de plusieurs paramètres modifiables, et un système de capteurs, qui détecte, pendant le fonctionnement de la grue, les paramètres modifiables actuels et les met à disposition de l'unité de surveillance, caractérisé en ce qu'une ou plusieurs valeurs de capteur (11, 12, 13) sont modifiées avant le calcul de la capacité de charge admissible, pour déterminer la capacité de charge admissible pour un ou plusieurs paramètres futurs, et une vérification est effectuée, dès que la capacité de charge réelle correspond à la capacité de charge admissible ou la dépasse et que l'unité de surveillance a arrêté ou limité le mouvement de la grue, dans lequel, lors de la vérification, on vérifie par la modification ciblée de l'au moins une valeur de capteur, quelle modification ou quelles modifications de paramètre entraînent une diminution de la capacité de charge réelle et/ou une augmentation de la capacité de charge admissible et au moins une ou plusieurs modifications possibles de paramètres ou un ou plusieurs mouvements de grue possibles sont indiqués et/ou autorisés.
- Procédé selon la revendication 1, caractérisé en ce que l'unité de surveillance modifie le ou les paramètres de telle sorte que la capacité de charge réelle ne peut pas dépasser la capacité de charge admissible calculée, la modification d'au moins un des paramètres étant de préférence effectuée de telle manière que la vitesse de la modification de paramètre est diminuée en continu ou par paliers ou arrêtée avant qu'une valeur de paramètre ne soit atteinte pour laquelle la capacité de charge admissible correspond à la capacité de charge réelle.
- Procédé selon l'une des revendications précédentes, caractérisé en ce qu'au moins un des paramètres est un paramètre concernant la position de la grue ou d'un élément structural de grue et/ou au moins un autre paramètre est un paramètre concernant la longueur de la flèche, l'angle d'inclinaison de la flèche, le rayon de contrepoids de derrick et/ou l'angle de rotation de la plateforme tournante.
- Procédé selon l'une des revendications précédentes, caractérisé en ce que la vitesse de la modification de paramètre est diminuée en continu ou par paliers à partir du passage sous une différence entre la capacité de charge réelle et la capacité de charge admissible.
- Procédé selon l'une des revendications précédentes, caractérisé en ce que la grue comprend une base d'appui variable et l'unité de surveillance surveille, pour la surveillance de la sécurité de grue, plusieurs critères de sécurité pendant le fonctionnement de la grue, une valeur limite spécifique admissible étant calculée et son respect surveillé pendant le fonctionnement de la grue pour chaque critère qui dépend d'au moins un paramètre concernant la configuration de la grue et/ou le mouvement de la grue pendant le fonctionnement de la grue.
- Procédé selon la revendication 5, caractérisé en ce que l'au moins un paramètre concernant la configuration de la grue et/ou le mouvement de la grue pendant le fonctionnement de la grue concerne la base d'appui variable et/ou l'angle de rotation de la partie tournante.
- Procédé selon l'une des revendications précédentes 5 ou 6, caractérisé en ce qu'au moins une valeur limite spécifique est la capacité de charge spécifique admissible.
- Procédé selon l'une des revendications précédentes 5 à 7, caractérisé en ce que la capacité de charge totale admissible est calculée à partir des différentes valeurs limites spécifiques ou capacités de charge spécifiques admissibles des différents critères.
- Procédé selon la revendication 8, caractérisé en ce que, pour le calcul de la capacité de charge totale admissible, les critères sont partagés en au moins deux modes de calcul différents, en particulier en modes de calcul linéairement dépendants et linéairement indépendants.
- Procédé selon la revendication 9, caractérisé en ce que, dans une première étape, la capacité de charge admissible est calculée pour chaque critère linéairement indépendant, puis le minimum de ces capacités de charge est déterminé, et dans une seconde étape, une capacité de charge admissible pour les critères linéairement dépendants est déterminée par itération, l'itération commençant de préférence par le minimum de la capacité de charge des critères linéairement indépendants.
- Procédé selon la revendication 10, caractérisé en ce que la détermination de la capacité de charge est effectuée selon la méthode de dichotomie.
- Procédé selon l'une des revendications précédentes 8 à 11, caractérisé en ce qu'un ou plusieurs tableaux de capacités de charge préalablement calculés sont enregistrés sur la grue de manière à pouvoir être consultés, les tableaux contenant des valeurs limites significatives pour la résistance.
- Procédé selon l'une des revendications précédentes, caractérisé en ce qu'un planificateur d'utilisation de grue intégré est utilisé pour une surveillance de la grue à redondance hétérogène.
- Grue comprenant une unité de surveillance, un système de capteurs et de préférence une base d'appui variable pour exécuter le procédé selon l'une des revendications 1 à 13.
- Unité de surveillance de grue, en particulier limiteur de couple de charge (20) pour une grue selon la revendication 14 pour exécuter le procédé selon l'une des revendications 1 à 13.
- Support de données comprenant un logiciel enregistré destiné à être exécuté sur une unité de surveillance de grue selon la revendication 15, comprenant des instructions qui ont pour effet que la grue selon la revendication 14 exécute les étapes de procédé selon l'une des revendications 1 à 13.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102012011871.6A DE102012011871B4 (de) | 2012-06-13 | 2012-06-13 | Verfahren zur Überwachung der Kransicherheit sowie Kran |
| DE102012011726.4A DE102012011726C5 (de) | 2012-06-13 | 2012-06-13 | Verfahren zum Betreiben eines Krans mit Überwachungseinheit sowie Kran |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2674384A1 EP2674384A1 (fr) | 2013-12-18 |
| EP2674384B1 true EP2674384B1 (fr) | 2021-01-27 |
Family
ID=48670320
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13002979.6A Active EP2674384B1 (fr) | 2012-06-13 | 2013-06-11 | Procédé de surveillance de la sécurité d'une grue et grue |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9446935B2 (fr) |
| EP (1) | EP2674384B1 (fr) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014031223A (ja) * | 2012-08-01 | 2014-02-20 | Tadano Ltd | 作業範囲図および作業範囲図表示装置 |
| DE102014000652A1 (de) * | 2014-01-17 | 2015-07-23 | Senvion Se | Vorrichtung mit einer Windenergieanlage und einem Kran |
| DE102014105618A1 (de) | 2014-04-22 | 2015-10-22 | Terex Cranes Germany Gmbh | Verfahren und Vorrichtung zum Betreiben eines Mobilkrans sowie Mobilkran |
| DE102015006992B4 (de) * | 2014-06-10 | 2021-04-15 | Liebherr-Werk Ehingen Gmbh | Verfahren und System zur Berechnung von Daten für den Betrieb eines Krans |
| CN104192714B (zh) * | 2014-07-30 | 2016-04-27 | 徐州重型机械有限公司 | 用于起重机人机交互吊装智能化操作的方法和力矩限制器 |
| EP3191398B1 (fr) * | 2014-09-11 | 2020-02-26 | Jacques Tranchero | Grue pour lever et transporter des charges comportant un système de protection contre le basculement |
| DE102015112194B4 (de) | 2015-07-27 | 2019-01-03 | Manitowoc Crane Group France Sas | Verfahren zur Planung oder Überwachung der Bewegung eines Kranes sowie Kran |
| DK3362399T4 (da) * | 2015-10-16 | 2024-04-15 | Palfinger Ag | Arrangement af en styring og et mobilt styringsmodul |
| DE102016104358B4 (de) * | 2016-03-10 | 2019-11-07 | Manitowoc Crane Group France Sas | Verfahren zum Ermitteln der Tragfähigkeit eines Krans sowie Kran |
| DE102017120613B4 (de) * | 2017-09-07 | 2024-03-14 | Liebherr-Werk Ehingen Gmbh | Verfahren zum Bewegen einer Last mit einem Kran |
| KR102180150B1 (ko) * | 2018-12-27 | 2020-11-17 | (주)아이티공간 | 크레인 안전 관리 시스템 |
| CN109761147B (zh) * | 2019-03-04 | 2021-04-20 | 大连理工大学 | 一种履带起重机地基承载刚度在线检测方法 |
| CN113003419A (zh) * | 2021-03-09 | 2021-06-22 | 浙江三一装备有限公司 | 作业机械结构动态模拟显示方法及系统 |
| FR3123908B1 (fr) * | 2021-06-14 | 2023-10-27 | Manitowoc Crane Group France | Procédé de sécurisation d’une grue à la survenue d’un évènement exceptionnel |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5217126A (en) | 1991-10-24 | 1993-06-08 | Kabushiki Kaisha Kobe Seiko Sho | Safety apparatus for construction equipment |
| EP0675069A1 (fr) * | 1994-02-28 | 1995-10-04 | Franz Plasser Bahnbaumaschinen-Industriegesellschaft m.b.H. | Machine pour voie ferroviaire avec grue pivotante |
| EP0779238A1 (fr) | 1995-12-14 | 1997-06-18 | Liebherr-Werk Ehingen GmbH | Grue montée sur un véhicule |
| US6744372B1 (en) | 1997-02-27 | 2004-06-01 | Jack B. Shaw | Crane safety devices and methods |
| DE102005059768A1 (de) | 2005-07-22 | 2007-01-25 | Liebherr-Werk Ehingen Gmbh | Kran, vorzugsweise Raupen- oder Fahrzeugkran |
| DE102005035460A1 (de) | 2005-07-28 | 2007-02-01 | Liebherr-Werk Ehingen Gmbh | Verfahren zur Traglastermittlung bei Kranen |
| DE102005035729A1 (de) | 2005-07-29 | 2007-02-01 | Liebherr-Werk Ehingen Gmbh | Verfahren zum Betreiben eines Krans |
| DE102006040782A1 (de) | 2006-08-31 | 2008-03-20 | Liebherr-Werk Nenzing Gmbh, Nenzing | Sicherungs- und Steuerungsverfahren für Krane |
| DE202006017730U1 (de) | 2006-11-21 | 2008-04-03 | Liebherr-Werk Ehingen Gmbh | Mobilkran |
| CN101348216A (zh) | 2008-09-05 | 2009-01-21 | 湖南三一起重机械有限公司 | 一种起重机安全保护系统及其起重机 |
| DE102008021627A1 (de) | 2008-04-30 | 2009-11-12 | Liebherr-Werk Ehingen Gmbh | Mobilkran und Verfahren zum Betreiben eines Mobilkranes |
| DE102011115240A1 (de) * | 2010-10-14 | 2012-04-19 | Liebherr-Werk Ehingen Gmbh | Kran, insbesondere Raupen- oder Mobilkran |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5730305A (en) * | 1988-12-27 | 1998-03-24 | Kato Works Co., Ltd. | Crane safety apparatus |
| WO1996027548A1 (fr) * | 1995-03-03 | 1996-09-12 | Komatsu Ltd. | Dispositif destine a indiquer la plage de mobilite d'un vehicule a grue mobile |
| DE19731089A1 (de) * | 1997-07-19 | 1999-01-21 | Bosch Gmbh Robert | Einrichtung zur Gewichtsbestimmung von angelenkten Lasten |
-
2013
- 2013-06-11 US US13/915,114 patent/US9446935B2/en active Active
- 2013-06-11 EP EP13002979.6A patent/EP2674384B1/fr active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5217126A (en) | 1991-10-24 | 1993-06-08 | Kabushiki Kaisha Kobe Seiko Sho | Safety apparatus for construction equipment |
| EP0675069A1 (fr) * | 1994-02-28 | 1995-10-04 | Franz Plasser Bahnbaumaschinen-Industriegesellschaft m.b.H. | Machine pour voie ferroviaire avec grue pivotante |
| EP0779238A1 (fr) | 1995-12-14 | 1997-06-18 | Liebherr-Werk Ehingen GmbH | Grue montée sur un véhicule |
| US6744372B1 (en) | 1997-02-27 | 2004-06-01 | Jack B. Shaw | Crane safety devices and methods |
| DE102005059768A1 (de) | 2005-07-22 | 2007-01-25 | Liebherr-Werk Ehingen Gmbh | Kran, vorzugsweise Raupen- oder Fahrzeugkran |
| DE102005035460A1 (de) | 2005-07-28 | 2007-02-01 | Liebherr-Werk Ehingen Gmbh | Verfahren zur Traglastermittlung bei Kranen |
| DE102005035729A1 (de) | 2005-07-29 | 2007-02-01 | Liebherr-Werk Ehingen Gmbh | Verfahren zum Betreiben eines Krans |
| DE102006040782A1 (de) | 2006-08-31 | 2008-03-20 | Liebherr-Werk Nenzing Gmbh, Nenzing | Sicherungs- und Steuerungsverfahren für Krane |
| DE202006017730U1 (de) | 2006-11-21 | 2008-04-03 | Liebherr-Werk Ehingen Gmbh | Mobilkran |
| DE102008021627A1 (de) | 2008-04-30 | 2009-11-12 | Liebherr-Werk Ehingen Gmbh | Mobilkran und Verfahren zum Betreiben eines Mobilkranes |
| CN101348216A (zh) | 2008-09-05 | 2009-01-21 | 湖南三一起重机械有限公司 | 一种起重机安全保护系统及其起重机 |
| DE102011115240A1 (de) * | 2010-10-14 | 2012-04-19 | Liebherr-Werk Ehingen Gmbh | Kran, insbesondere Raupen- oder Mobilkran |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130345938A1 (en) | 2013-12-26 |
| EP2674384A1 (fr) | 2013-12-18 |
| US9446935B2 (en) | 2016-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2674384B1 (fr) | Procédé de surveillance de la sécurité d'une grue et grue | |
| EP1894882B1 (fr) | Procédé de protection et de commande pour grue | |
| DE102011107754B4 (de) | Winkelbezogenes Verfahren zur Überwachung der Kransicherheit während des Rüstvorgangs, sowie Kran und Kransteuerung | |
| EP3219662B1 (fr) | Procédé de détermination de la capacité de charge d'une grue et grue | |
| DE102012011871B4 (de) | Verfahren zur Überwachung der Kransicherheit sowie Kran | |
| DE102010020016B4 (de) | Kran und Verfahren zum Aufrichten des Krans | |
| EP3856673B1 (fr) | Grue et procédé pour surveiller le fonctionnement d'une telle grue | |
| EP2719652B1 (fr) | Dispositif de transport de personnes au moyen d'une grue, et grue dotée d'un dispositif de transport de personnes | |
| DE102008021627A1 (de) | Mobilkran und Verfahren zum Betreiben eines Mobilkranes | |
| DE102012011726C5 (de) | Verfahren zum Betreiben eines Krans mit Überwachungseinheit sowie Kran | |
| EP1748021B2 (fr) | Procédé de mésure de charge pour grue | |
| EP1313664A1 (fr) | Systeme de securite redondant d'un vehicule | |
| EP1925586B1 (fr) | Grue mobile | |
| DE10115312A1 (de) | Verfahren zur Steuerung von Kranbewegungen sowie Kran | |
| EP2733268B1 (fr) | Machine dotée d'une installation de chargement | |
| DE102013000463A1 (de) | Mobiles Arbeitsgerät, insbesondere Mobilkran | |
| EP2733110A1 (fr) | Machine mobile avec un dispositif de chargement, la machine peut fonctionner dans deux modes de commande d'urgence | |
| EP4053065B1 (fr) | Dispositif et procédé de commande d'un mécanisme rotatif de grue, ainsi que grue | |
| DE102017113386A1 (de) | Hebezeug, insbesondere ein Mobilkran oder ein Seilbagger, mit einer Vorrichtung zur Überwachung des Aufricht- und Ablegevorganges eines Auslegersystems und entsprechendes Verfahren | |
| DE202013003782U1 (de) | Sensorbasierte Überwachung von Windrichtung und Wärmeeinstrahlung für ein mobiles Arbeitsgerät | |
| DE102021128317A1 (de) | Verfahren und System zur Planung eines Einsatzes zum Heben einer Last mit einem Kran | |
| DE20206677U1 (de) | Sicherheitsvorrichtung für Krane | |
| DE3337445A1 (de) | Belastungswaechter mit momentkapazitaetsbegrenzer zur verwendung in einem hydraulikkreis | |
| WO2014161636A1 (fr) | Grue | |
| WO2004016540A1 (fr) | Procede de commande du fonctionnement d'un treuil roulant |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20140604 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20170127 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20200819 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1358200 Country of ref document: AT Kind code of ref document: T Effective date: 20210215 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502013015465 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20210127 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210428 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210427 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210427 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502013015465 Country of ref document: DE |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| 26 | Opposition filed |
Opponent name: MANITOWOC CRANE GROUP GERMANY GMBH Effective date: 20211013 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20210611 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210611 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210630 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210611 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210611 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210630 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1358200 Country of ref document: AT Kind code of ref document: T Effective date: 20210611 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210611 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R100 Ref document number: 502013015465 Country of ref document: DE |
|
| PLCK | Communication despatched that opposition was rejected |
Free format text: ORIGINAL CODE: EPIDOSNREJ1 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20130611 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230607 |
|
| PLBN | Opposition rejected |
Free format text: ORIGINAL CODE: 0009273 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: OPPOSITION REJECTED |
|
| 27O | Opposition rejected |
Effective date: 20230323 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240627 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240626 Year of fee payment: 12 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20240627 Year of fee payment: 12 |