EP2672585B1 - Solarverbinder-Montagewerkzeug - Google Patents
Solarverbinder-Montagewerkzeug Download PDFInfo
- Publication number
- EP2672585B1 EP2672585B1 EP20130170519 EP13170519A EP2672585B1 EP 2672585 B1 EP2672585 B1 EP 2672585B1 EP 20130170519 EP20130170519 EP 20130170519 EP 13170519 A EP13170519 A EP 13170519A EP 2672585 B1 EP2672585 B1 EP 2672585B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- der
- holding
- housing
- solar
- die
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
Images


























Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R43/00—Apparatus or processes specially adapted for manufacturing, assembling, maintaining, or repairing of line connectors or current collectors or for joining electric conductors
- H01R43/20—Apparatus or processes specially adapted for manufacturing, assembling, maintaining, or repairing of line connectors or current collectors or for joining electric conductors for assembling or disassembling contact members with insulating base, case or sleeve
- H01R43/22—Hand tools
Definitions
- the invention relates to a solar connector mounting tool, which is used for mounting a solar connector.
- a connector housing is moved by means of a relative movement on an assembly and pressed by means of this movement.
- the assembly is in this case formed with a cable, which is preferably pressed with a plug and on which a seal is arranged.
- This coupling head is coupled with a pull and reset rod which extends to and beyond a second end face of the solar connector mounting tool opposite the first end face of the housing such that the pull and reset rod projects out of the solar connector mounting tool.
- the pull and reset rod can be moved out in several stages with pivoting opening and closing movements of the hand lever from the housing more and more.
- the mandrel is then pulled with a plug and cable through the connector housing until the connector and cable have reached their destination in the connector housing. During this pulling through the mandrel and the connector with cable through the connector housing, the connector housing does not move. Finally, the cable with plug and connector housing is removed from the solar connector mounting tool.
- the operating instructions recommend a subsequent check of the proper fit of the plug housing on the cable and the plug.
- US 2010/0180436 A1 discloses a tool which is intended to press a workpiece in the form of an end connector with two possible different lengths on a cable.
- the tool has a hand-held housing, against which a single hand lever is pivotally mounted.
- the hand lever drives a guide carriage via a toggle mechanism.
- the kinematics of the toggle mechanism can be switched between a first kinematics with a shorter mounting stroke of the guide carriage and a second kinematics with a longer assembly stroke of the guide carriage by the effective length of a toggle lever of the toggle mechanism can be changed.
- the change in the effective length of the toggle mechanism is effected in that the toggle lever in the end region facing away from the guide carriage has two holes which merge into one another, the centers of which are offset in the longitudinal direction of the toggle lever and which have different diameters.
- a bearing pin which is mounted in this end region of the toggle lever relative to the hand lever, has two axial sections with different diameters, which correspond to the different diameters of the bores of the toggle lever.
- the tool is thus adapted to the respective connector by selecting the effective bore.
- the connector is attached to the guide carriage, which then a Montagehub can be generated with the length corresponding to the length of the connector by pivoting the hand lever.
- FR 2 731 301 A1 discloses a device for inserting a cable with terminal disposed thereon into a connector housing.
- the terminal is clamped and guided by means of a scissor-type clamping mechanism.
- a pivoting of legs which form the "scissor handles" of the clamping mechanism, takes place about the pivot axis.
- the closing of the clamping mechanism via basically operable independently of the clamping mechanism hand lever, which are also pivotable about the aforementioned pivot axis.
- the hand levers carry actuating pins.
- the actuating pin can be pressed against each other with the operation of the hand lever against the outer sides of the legs, thus closing the scissor-type clamping mechanism and pinching the terminal between the jaws takes place against the action of the spring.
- the two hand levers After mounting the cable / terminal with the connector housing, the two hand levers must be manually acted against the joining direction to release the clamping connection. In view of the still existing clamping connection between the clamping jaws and the terminal, this leads to a test force also being applied to the connection established between the terminal and plug housing, the test force corresponding to the force applied manually to the hand lever.
- the invention has for its object to improve a solar connector mounting tool in terms of handling and process reliability in the assembly of a solar connector with the solar connector assembly tool.
- the cable after mounting the solar connector, the cable must be manually applied to the connector housing with a test force to check whether the connection between the connector, cable and seal formed assembly and the connector housing has been made properly.
- This test force may be performed by the user after the solar connector has been removed from the solar connector mounting tool and by the user holding the connector housing with one hand while the user pulls on the cable with the other hand.
- FR 2 731 301 A1 A test force is manually applied by the user when the assembled solar connector is still in the solar connector assembly tool by the user manually applied the two hand lever against the joining direction with the test force.
- the solar connector assembly tool has a first holding device for the assembly formed with the cable and a second holding device for a connector housing.
- a basically arbitrarily designed drive mechanism is coupled with (at least) one of the holding devices in such a way that it can be moved relative to the other holding device and acted upon by a pressing force which can ultimately be used for mounting the solar connector.
- the drive mechanism In this case, it is designed in such a way that the holding devices can be moved relative to one another, namely towards each other, via the latter for press-fitting of the plug housing onto the assembly.
- a loading of a spring element which may be, for example, a structurally and in terms of the material of any desired spring or multiple springs in series or parallel connection.
- the pressing stroke whereby the assembly of the assembly is terminated with the connector housing, and the pressing force of the drive mechanism is partially or completely eliminated, the spring element acted upon during the Presshubs the holding devices apart. Since the assembly is still held in the first holding device and the plug housing is still held in the second holding device, thus also the assembly and the plug housing are pushed apart by the spring element. Thus, with the solar connector assembly tool by the spring element a test force generated.
- the invention also includes a solar connector mounting tool which is actuated by auxiliary power, such as an electric or hydraulic drive.
- the completion of the pressing stroke and the elimination of the pressing force of the drive mechanism can be done in any way. For example, this can be done manually by the user. Also possible is an automatic detection of the termination of the pressing stroke and an automatic elimination of the pressing force. In a particular embodiment of the invention, this is motion-controlled, for example, when the pressing stroke is completed. Alternatively or additionally, a force control can take place by the termination of the pressing stroke is given when a predetermined target value of the pressing force is reached or exceeded.
- the force relationships between the holding devices and thus between the module and the connector housing alone or primarily determined by the spring element whereby the amount of test load by the spring element predetermined or at least codetermined.
- the test force may vary depending on the characteristic of the spring element. Under certain circumstances, it may be desired that further requirements exist with regard to the application of the test force.
- a damping element in which it is, for example, to a Oil or gas spring can act.
- This damping element preferably acts between the holding devices, which may be connected in parallel, for example, the spring element.
- the damping element can have any desired damping characteristic, in particular speed-proportional damping.
- the process reliability can be further increased for a development of the solar connector assembly tool, if there is a measuring device in which detects the relative displacement of the two holding devices as a result of the application of the spring element upon application of the plug housing and the assembly with the test force.
- a measuring device in which detects the relative displacement of the two holding devices as a result of the application of the spring element upon application of the plug housing and the assembly with the test force.
- different setting behavior or different elasticities of different solar connectors that have been mounted with the solar connector assembly tool can be detected via the measuring devices.
- a small relative displacement detected by the measuring device results, while for the other improperly mounted solar connector having a settling behavior, a larger relative displacement results. which can be detected by means of the measuring device.
- it can also be detected via the measuring device whether components of the solar connector have been used outside the tolerance range, components are mounted in wrong orientation with respect to one another or incorrect components are mounted together.
- the measuring device can basically be designed as desired.
- the measuring device is designed as a user-optically readable measuring device.
- the measuring device has a mark, for example an arrow, which is attached to the holding device, which is moved as a result of the spring element with completion of the press stroke relative to a housing of the solar connector assembly tool.
- the measuring device has a marking, for example a counter-arrow, a marked area or a reading scale, which is attached to the housing. The user can then visually read on the basis of the relative position or spacing of the markers at the end of application of the test force, which relative displacement has resulted between the two holding devices.
- the invention proposes in a further embodiment, that the drive mechanism is formed with a toggle.
- the use of a toggle lever has been found to be advantageous for the assembly of solar connectors, since by means of the toggle lever with relatively small actuating forces large pressing forces can be brought about.
- the translation of the user applied force to the pressing force acting on the plug housing and assembly can be continuously increased, thus causing the hand levers to move at the beginning of the press stroke with small required pressing forces a relatively large relative movement of the holding devices and thus the plug housing and the assembly brought about, while towards the end of the pressing stroke finely dosed the same movement of the hand lever leads to large pressing forces and a relatively small relative movement between the holding devices.
- a further spring element is present, via which the drive mechanism is traceable after passing through the press stroke in its initial position.
- a further increase in process reliability can be achieved if (in addition to the aforementioned holding devices) a testing and / or holding device is present.
- a testing and / or holding device By means of the test and / or holding device can be checked whether an assembly is inserted with the correct orientation in the solar connector assembly tool.
- the module can be held in the correct orientation in the solar connector assembly tool via the testing and / or holding device.
- the holding devices of the solar connector mounting tool are individualized for a design of a plug housing and / or a design of a module. But it is also possible that the holding devices are suitable for different designs.
- the holding device for the plug housing has a holding body which has two different operating positions: In a first operating position, the holding body can hold a plug housing with a first geometry. By contrast, the holding body in the second operating position hold a plug housing with a second geometry.
- a further increase in process safety can be ensured when using the solar connector mounting tool when the drive mechanism has a Zwangsgesperre.
- a Zwangsgesperre a mechanism is understood, which ensures a once reached relative position of the holding devices during the pressing stroke, but allows further approach of the holding devices to each other with continuation of the pressing stroke. Only with completion of the pressing stroke allows the forced restraint, that the holding devices are moved away from each other again.
- the Zwangsgesperres can be avoided that the pressing stroke is only incomplete, which would also be an incomplete assembly.
- the solar connector mounting tool is a holding device, preferably the holding device for the assembly, arranged on a outside of a housing of the solar connector mounting tool actuator from a holding position, in particular a clamping position, in a released position and / or by a dissolved Position transferable to a holding position.
- the holding device is in this case formed with spring-loaded clamping jaws which, depending on the embodiment, can be acted upon by the spring in the direction of the released position or in the direction of the holding position.
- Fig. 1 shows exemplary and highly schematic of a solar connector 1.
- a seal 5 is arranged at a defined distance 3 from a front side 4.
- the seal 5 adjacent end portion of the cable 2 is stripped and crimped over a crimping tool with a plug 6.
- a connector housing 9 is moved, pushed or pressed by means of a solar connector assembly tool 8.
- a locking lug 10 behind the plug 6.
- the seal 5 is compressed radially between the outer surface of the cable 2 and the stepped inner surface 99 of the plug housing 9. This is to ensure a seal of the solar connector 1.
- via the compression of the seal 5 between the connector housing 9 and cable 2 is a recording of acting on the cable 2 during operation forces, whereby a "strain relief" can be done.
- Fig. 2 to 20 show a first embodiment of the solar connector mounting tool 8:
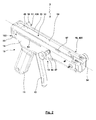
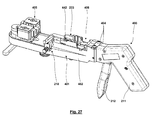
- Fig. 2 shows the solar connector mounting tool 8 in a three-dimensional view.
- the solar connector mounting tool 8 has a "gun-shaped” design, wherein the solid “pistol grip” forms a housing-fixed lever 11, while the “trigger” is extended according to the length of the hand lever 11 and forms a pivotable hand lever 12.
- the “barrel” is an assembly axis 34 with a mounting direction 97, along which in the solar connector assembly tool 8 moving, here pushing the plug housing 9 takes place on the assembly 7.
- a housing 13 of the solar connector mounting tool 8 is formed with two half shells 14, 15, which form a dividing plane in a longitudinal center plane of the solar connector mounting tool 8.
- the solar connector mounting tool 8 has a drive mechanism 16, a moving unit 17, a checking device 18, and a fixing unit 19.
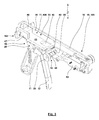
- the drive mechanism 16 is formed with the pivoted hand lever 12, which is rigidly connected within the housing 13 with a drive crank 20 ( Fig. 3 ).
- the hand lever 12 in the end portion connected to the drive crank 20 has a flattening, in the area of which the hand lever 12 via a connecting pin 21 and a pivot pin 22 driveably arranged with two sides of the flattened plate-shaped Drive crank plates 23, 24 are connected, which together form the drive crank 20.
- the pivot pin 22 is pivotally mounted in the projecting from the drive crank plates 23, 24 end portions in the half-shells 14, 15 of the housing 13, so that the hand lever 12 with the drive crank 20 is pivotable about a predetermined by the pivot pin 22 pivot axis.
- the other spring base of the tension spring 26 is supported under prestress on a bolt 27 which is mounted endwise in the half shells 14, 15 of the housing 13.
- the spring bias of the tension spring 26 causes the hand lever 12 in Fig. 5 is applied with a torque counterclockwise, so that the hand lever 12 is acted upon by the hand lever 11 away.
- Hand lever 12 and drive crank 20 together form a lever, wherein hand lever 12 on the one hand and drive crank 20 are arranged on opposite sides of the pivot pin 22 formed with the pivot bearing.
- the drive crank 20 is held by the drive crank plates 23, 24, a pivot pin 28.
- a toothed plunger 29 is pivotally mounted between the drive crank plates 23, 24.
- the pivot axis of the toothed ram 29 is in this case oriented parallel to the predetermined by the pivot pin 22 pivot axis.
- the toothed ram 29 extends from the pivot pin 28 to the front, wherein the toothed ram 29 is acted upon by a spring element, here a via a housing-fixed pin 30 supported spiral leg spring 31 upwards.
- the toothed ram 29 has a toothed segment 32 in its end region facing away from the pivot pin 28.
- the toothed segment 32 interacts with a guide slide 33, which is displaceably guided in the direction of the mounting axis 34 with respect to the housing 13.
- the guide carriage 33 has on its underside a rack-like toothing 34, whose longitudinal extension in the direction of the mounting axis 34 corresponds at least to the desired assembly stroke of the solar connector assembly tool 8.
- the toothed segment 32 engages as a result of the loading by the spiral leg spring 31 in the toothing 35 a.
- the tooth contours of the toothed segment 32 and the toothing 35 are selected such that the guide carriage 33 manually in Fig.
- a pawl 37 via a pivot pin 38 is pivotally mounted relative to the housing 13.
- spring element here a spiral leg spring 39
- the pawl 37 with a toothed segment 40 of the same against the teeth 35 is applied.
- the toothed ram 29 and the pawl 37 are in this case offset in the direction of the mounting axis 34, but arranged with a certain overlap, while these are offset transversely to the mounting axis and transversely to the longitudinal center plane.
- the pawl 37 has an actuating pin 31, which passes through a guide slot 42 in the half shell 15 of the housing 13.
- the pawl 37 in the in Fig. 5 shown upper end position, in which caused by the spiral leg spring 39, the toothed segment 40 can enter into operative connection with the toothing 35 in order to secure the once reached axial position of the guide carriage 33. If, however, the actuating pin 41 is pressed manually outside the housing 13 down, the toothed segment 40 of the pawl 37 is disengaged from the teeth 35, whereby the securing effect of Zwangsgesperres 36 can be canceled.
- the toothed plunger 49 is also driven downwards by the pawl 37 when the actuating pin 41 is manually actuated downwards, so that the toothed segment 32 of the toothed plunger 29 is also disengaged from the toothing 35.
- a spring element 44 acts, which pulls the guide carriage 33 against the mounting direction 97 to the rear, when both the toothed segment 32 and the toothed segment 40 is out of engagement with the toothing 35.
- the movement unit 17, which can also be designed as a holding, drive and / or guide unit, is formed with the guide carriage 33.
- the guide carriage 33 has in the mounting direction in the rear end region 97 has a U-shaped cross section, the base leg of a base plate 45 and the side legs of two parallel side plates 46, 47 are formed. While the side plate 46 is formed continuously over the entire length of the guide carriage 33, the side plate 47 ends approximately centrally, so that in the front end region of the guide carriage 33 has only an L-shaped cross-section.
- the base plate 45 is equipped with a suitable contour 48, which is adapted to the outer contour of the plug housing 9.
- Fig. 6 shows a side view of the guide slide 33 shown here transparent with a holding body 49 disposed therein.
- the holding body 49 is rotatably connected to a transversely extending to the mounting axis 34 pivot pin 50 which by aligned through holes 51, 52 of the side plates 46, 47 and parallel to the mounting axis 34 oriented guide slots 53, 54 passes through the housing 13 and in the end regions rotatably connected with wing nuts 55, 56 is connected ( Fig. 7 ).
- Fig. 2 and 14 is the holding body 49 in a first operating position, in which the holding body 49 can hold a plug housing 9 with a first geometry.
- This holding can consist in that the plug housing 9 rests against an end face 57 of the holding body 49 and is supported.
- the end face 57 is suitably contoured to allow the holding of the plug housing 9, has a recess into which the plug housing 9 enters or the holding body 49 is "encompassed" by a sleeve-like plug housing 9.
- the pivot pin 50 is eccentrically arranged in the holding body 49 such that the distance 59 of the end face 57 of the pivot axis of the pivot pin 50 is greater than the distance 60 of the pivot axis of the pivot pin 50 from the end face 58.
- the difference of the distances 59, 60 correspond to the length of the extension 61, by which the male connector housing 9 is longer than the female connector housing 9. It is possible that the holding body 49 with its underside in the two operating positions on the base plate 45th is supported. Under certain circumstances, an additional backup of the operating positions of the holding body 49, for example by a locking or locking device. For this purpose, transversely to the mounting axis 34 in the holding body 49 (or in a side plate 46, 47), a locking element elastically supported, which engages in the operating positions in a corresponding recess of the side plate 46, 47 (or the holding body 49).
- the change in the operating position of the holding body 49 can be caused by a rotation of the wing nuts 55, 56.
- the pivot pin 50 has, together with the holding body 49 and the guide carriage 33 in the direction of the mounting axis 34 and by the guide slots 53, 54 predetermined (further) degree of freedom.
- a manual loading of the wing nuts 55, 56 in the mounting direction 97 causes as a unit of the guide carriage 33 with holding body 49 and supported on the holding body 49 plug housing 9 are pushed forward in mounting direction 97, wherein the tooth segments 40, 32 ratchet along the teeth 35 move.
- the fixing unit 19 is arranged in the front end region of the "run" of the solar connector assembly tool 8 and serves to position and hold the pre-assembled assembly 7.
- the fixing unit 19 is shown in different disassembly stages in particular in the Fig. 10 to 13 and 15, 16 and 20.
- the fixing unit 19 is formed with a drive body 62, which is here plate-shaped, has only one degree of freedom parallel to the mounting axis 34 and is guided relative to a guide carriage 93. Via a spring element 63 of the guide carriage 93 is biased against the assembly direction 97 to the rear under bias against a stop 64 of the housing 13.
- the groove body 68 has on its underside pointing to the drive body 62 a slot or a long groove 69, whose or its longitudinal axis both relative to the mounting axis 34 and with respect to the actuation direction of the actuating member 65 is inclined.
- a sliding block or pin 70 engages a sliding block or pin 70, which extends from the drive body 62 upwards.
- a drive connection stage 71 is formed, by means of which, in view of the inclined orientation of the slot 69, a movement of the groove body 68, caused by the actuation of the actuator 65, is converted transversely to the mounting axis 34 in a movement of the drive body 62 coaxial to the mounting axis 34.
- the drive body 62 has two V-shaped elongated holes 72, 73, which extend symmetrically on both sides of the mounting axis 34.
- the longitudinal axis of the elongated holes 72, 73 is both inclined relative to the mounting axis 34 and to the actuating direction of the actuator. Transverse to the mounting axis 34 are compared to the guide carriage two jaws 74, 75 out, which in particular in Fig. 11 can be seen.
- the jaws 74, 75 each have V-shaped clamping surfaces 76, 77, which are arranged parallelogram in cross-section and clamp a arranged in the jaws 74, 75 cable 2 over the circumference, wherein the size of the parallelogram is dependent on the distance of the jaws 74, 75 from each other and thus of the diameter of the cable 2.
- the jaws 74, 75 are offset in the direction of the mounting axis 34 to each other, so that they are guided past each other laterally.
- the jaws 74, 75 each have on the bottom downwardly extending sliding blocks or pins 78, 79, with which they engage in the slots 72, 73 of the drive body 62.
- a further drive connection stage 80 is formed, which is a movement of the drive body 62 in the direction of the mounting axis 34, which is caused by an actuation of the actuator 65 using the drive connection stage 71 converts into a movement of the jaws 74, 75 transversely to the mounting axis 34, namely a movement of the jaws 74, 75 toward or away from each other.
- the jaws 74, 75 acted upon by springs 81, 82 which are supported on the housing 13 to each other.
- opening of the clamping jaws 74, 75 can take place such that a cable 2 is inserted into the fixing unit 19 from above.
- the elimination of the operating force 67 causes the Operating position of the fixing unit 19 of Fig. 15 in Fig. 16 changed, which as a result of the springs 81, 82 and possibly another spring 83 which acts on the groove body 68 or the actuator 65, the jaws 74, 75 are closed until the clamping surfaces 76, 77 to the outer surface of the cable 2 to the plant come and pinch this and fix it.
- the axial position of the assembly formed with the cable 2 7 is selected such that the seal 5 is in a predetermined axial position, which in particular rests against an end face of the guide carriage 93.
- This inserted into the solar connector assembly tool 8 state of the assembly 7 is, for example, in Fig. 17 shown. In this position, the plug housing 9 on the one hand and the assembly 7 on the other hand are arranged coaxially with each other.
- the checking device 18 is arranged between the moving unit 17 and the fixing unit 19.
- the test device 18 is formed with a test specimen 84.
- the test body 84 has an actuating button 85 and a hereby rigidly connected actuating plunger 86, which extends through a leading bore 87 of the half-shell 14 of the housing 13 therethrough.
- a spring 88 which extends for the illustrated embodiment outside of the housing 13 around the actuating plunger 86 around and is caught and biased between the housing 13 and the operating knob, the test piece 84 is applied without manual application of the actuating knob 85 to the outside. Manually, the test piece 84 can be pressed transversely to the mounting axis 34 inwardly into the housing 13.
- the test body 84 is not rotated about its actuating axis.
- the test device 18 is in the in Fig. 8 and Fig. 17 shown rest position.
- the actuating tappet 86 is formed in a rough approximation in the form of a horizontal U, so that it forms an open-edged recess 89, which is bounded by webs 90, 91.
- the plug 6 is formed out of round, namely flattened, in particular as a result of the crimping process in the axial region where it interacts with the test body 84.
- the plug 6 can enter the open-edged recess 89 as a result of its flattening, thus achieving a test position.
- the plug 6 can not enter the open-edged recess 89, but rather collides with the recess 89 limiting webs 90, 91 of the actuating plunger 86.
- the described fixing unit 19 is fixed in the direction of the mounting axis 34.
- the fixing unit is formed with a guide carriage 93, on which in the direction of the mounting axis 34 slidably the drive body 62 is mounted and the other explained components of the fixing unit are supported.
- the guide carriage 93 is pressed counter to the mounting direction 97 of the movement unit 17 by the prestressed spring element 63 against the stop 64. If a force is applied to the guide carriage 93 in the mounting direction 97, which is greater than the biasing force of the spring element 63, the guide carriage 93 can be released from the stop 64, so that the guide carriage 93 (and herewith the other components of the fixing unit 19) in Mounting direction 97 can move.
- a coupling rod 94 passes between the actuator 65 and groove member 68 through a slot 95 of the half shell 15 of the housing 13, wherein the length of the elongated hole 95 at least the permissible movement of the guide carriage 93 corresponds.
- the mounting movement may consist in that the plug housing 9 held by the movement unit 17 is pushed onto the assembly 7 held in the fixing unit 19. It is within the scope of the invention but quite possible that a fixing unit holds the connector housing 9, while a moving unit einschiebt the assembly held thereon 7 in the connector housing 9. Accordingly possible is the use of a drive mechanism by means of which a mounting or retraction takes place. For example, for a pulling movement instead of a pressure-loaded actuating tappet 86, an actuating tension element with associated drive mechanism can be used. Preferably, however, no pulling takes place through the plug housing 9, as is the case for the initially described prior art.
- the wing nuts 55, 56 represent an embodiment for the formation of an actuating member 102, by means of which both the idle stroke of the guide carriage 33 can be generated as well as the rotation of the holding body 49th
- a spring element is formed with a plurality of partial spring elements.
- the biasing force for the guide carriage 93 of the fixing unit 19 for the illustrated embodiments is generated with a plurality of parallel-acting part spring elements.
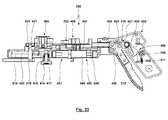
- FIGS. 21 to 32nd show a second embodiment of a solar connector mounting tool 208.
- FIGS. 21 to 33 are the first embodiment according to Fig. 2 to 20 corresponding components provided with reference numerals, the reference numerals in Fig. 2 to 20 increased by the number 200 correspond (for example, the solar connector mounting tool 8 according to FIG Fig. 2 to 20 in FIGS. 21 to 33 designated by reference numeral 208).
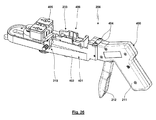
- Fig. 21 shows the solar connector mounting tool 208 in a three-dimensional view.
- the solar connector mounting tool 208 has a "gun-shaped” design, with the solid “pistol grip” forming a housing-mounted hand lever 211, while the “trigger” is elongated according to the length of the hand lever 211 and forming a pivotable hand lever 212.
- the "barrel” is an assembly axis 234 with a mounting direction 279, along which during the pressing stroke (and possibly a Leerhubs) in the solar connector mounting tool 208 a movement here a sliding of the connector housing 9 on the assembly 7, takes place. Deviating from the embodiment according to Fig.
- the solar connector mounting tool 208 is formed with a driving part 400 and a mounting, holding and guiding part 401.
- the drive part 400 is here formed with two half shells 214, 215 made of plastic, while the mounting, holding and guiding part 401 is formed with a solid support body 402, which is preferably a milled part made of metal, in particular aluminum.
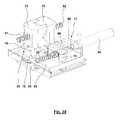
- the drive part 400 and the support body 402 are, as in Fig. 28 can be seen, connected via a tongue and groove or dovetail connection 403 with each other, with an additional fuse is made by fastening screws 404.
- a first holding device 405 and a second holding device 406 are displaceably guided along the mounting axis 234.
- the assembly 7 is held, which takes place here by clamping the cable 2 between two jaws 274, 275.
- the second holding device 406 has an upwardly open recess 407, which is delimited at the edge by a wall 358 which is essentially circumferential.
- the wall 408 has an opening 409 through which the assembly can enter the second holding device 406.
- the contour of the recess 407 corresponds to the outer contour of the plug housing 9 such that it can be inserted from above into the recess 407 such that the longitudinal axis of the plug housing is arranged coaxially to the mounting axis 234.
- the wall 408 has two lateral, mutually opposite openings 410, 411.
- a testing and / or holding device 218 is held on the carrier body 402.
- the first holding device 405 has a housing or support plate 412, which in the direction of the mounting axis 234 between a first operating position according to Fig. 21 and a second operating position according to Fig. 24 is guided relative to the support body 402.
- the housing or support plate 412 via spring-loaded detent balls 413, which in Fig. 24 can be seen and engage in detent recesses on the underside of the housing or support plate 412, rests, said first operating position can be relied upon application of sufficiently large forces by the user, overcoming the locking action.
- the second operating position is secured by a spring-loaded bolt 414, which engages positively in the second operating position in a vertical bore 415 of the housing or support plate 412.
- the second operating position can only be left, when against the action of a spring 416 by manual operation of a Actuating button 417 of the bolt 414 is brought out of engagement with the bore 415 (see. Fig. 32 ).
- the first holding device 405 can be transferred via an actuating member 265 from a holding position to a released position and vice versa.
- the actuator 265 is here designed as a lever 418, of which an end portion is a in Fig. 21 supporting in a vertical direction bearing shaft 419 which defines a vertical pivot axis for the lever 418.
- the bearing shaft 419 is passed through a slot 420 of the support body 402, so that the lever 418 is movable with the bearing shaft 419 together with the holding device 405 between the operating positions thereof.
- the bearing shaft 419 is rotatably received in a corresponding bore 421 of the housing or support plate 412, wherein the bearing shaft 419 is rotatably connected in a protruding from the housing or support plate 412 end portion with a cam 422 ,
- the lever 418 and the cam 422 thus pivot together in parallel horizontal planes.
- On the lateral surface of the cam plate 422 is due to an application by a spring, a drive part 423 (see. Fig. 30 ).
- the drive part 423 is guided via guide housing parts 424, 425 held on the housing or support plate 412 such that it has only one degree of freedom in the direction of the mounting axis 234.
- the drive part 423 is moved in the direction of the mounting axis 234 in view of the cam drive formed.
- the drive part 223 has wedge surfaces 426, 427 (FIG. Fig. 30 ). On the wedge surfaces 426, 427 abut against wedge surfaces 428, 429, which are each formed by a clamping jaw 274, 275.
- the jaws 274, 275 are acted upon for this embodiment by a compression spring 430 apart in a direction transverse to the mounting axis 234, which ultimately takes place, the loading of the drive member 423 against the lateral surface of the cam 422.
- the clamping jaws 274, 275 are supported on one side in the direction of the second holding device 406 on a support body 431, which is held rigidly on the housing or support plate 412.
- the contact between cam 422 and drive member 423 forms a first drive connection stage 271, via which a rotational movement of cam 422 about a vertical axis is converted into a translational movement of drive member 43 along assembly axis 234.
- Another drive connection stage 280 is formed with the contact of wedge surfaces 426 427 of the drive part 423 with the counter-wedge surfaces 428, 429 of the jaws 274, 275.
- a force flow thus takes place by the user via the hand lever 418, the bearing shaft 419 and the cam 422 with a first translation corresponding to the configuration of the cam drive to the drive part 423 and then with a further translation corresponding to the wedge angles to the jaws 274, 275th
- the checking and / or holding device 218 has a guide rod 432, which here has a circular cross-section with a flanged end region 433.
- the guide rod 432 is slidably guided in a guide bore 434 of the support body 402 transversely to the mounting axis 234, wherein a degree of twisting freedom is blocked or restricted.
- About two spring-loaded, guided against the guide rod 432 locking balls can Guide rod 432 are locked in two positions, in which the detent balls engage in a corresponding detent recess of the support body 402 (FIG. Fig. 31 ).
- an L-shaped holding body 436 is held via a connecting pin 435.
- the leg of the L-shaped holding body 436 which is not connected to the guide rod 432 in this case extends in a horizontal plane into the intermediate space between the holding devices 405, 406.
- the end region of this leg forms a test or holding jaw 437.
- a further test or holding jaw 439 is mounted on the leg via a bearing shaft 438, which is oriented parallel to the mounting axis 234, which is pressed due to the application of a spring, not shown here against the test or holding jaw 437, while the test or holding jaw 439 can be moved away from the test or holding jaw 437 via the manual actuation of an end region 440, counter to the action of the spring.
- the test and / or holding device 218 is not effective because the test or holding jaws are arranged laterally spaced from the mounting axis 234. If, by inserting the guide rod 432, the test and / or holding device is brought into effect, a component of the module 7, in particular a flattening of the plug 6, can be accommodated between the test or holding jaws 437, 439, whereby on the one hand a test function can be exercised like this one for Fig. 2 to 20 has been described. Alternatively or additionally, it is possible that in this way the plug 6 and thus the assembly 7 is held in the correct orientation with respect to a rotation angle about the mounting axis 234.
- the second holding device 406 is guided in a guide recess 441 of the supporting body 402 in the direction of the mounting axis 234 slidably.
- a spring element 442 which is formed here with two adjacent in a horizontal plane compression springs 443, 444, in the starting position.
- the holding device 406 in Fig. 31 . 32 be moved to the left and in the direction of the holding device 405 by the movement of the plunger 445 of the drive member 423, wherein with movement of the holding device 406, the application of the spring element 442 is greater.
- the movement of the holding device 406 is via a coupling element 446, which passes through a slot 447 of the support body 402 down, coupled to a damping cylinder 448, in which a damping piston 449, which is supported on the support body 402 or the drive member 400, is guided.
- the damping cylinder 448 and the damping piston 449 form a damping element 450, which is acted upon by movement of the holding device 406 and thus brings about a damping of this movement. It is entirely possible that in the damping element 450, a spring is integrated, which then supports the action of the spring element 442.
- the operation of the plunger 445 via a drive mechanism 216 which is formed with a toggle mechanism 451.
- the toggle mechanism 451 has a first toggle lever 452 and a second toggle lever 453, which are connected to one another via a knee joint 454.
- the knee lever 453 is rotatably mounted on the housing of the drive part 400 in the end region remote from the knee joint 454.
- the knee joint 454 facing away from the end portion of the toggle lever 452 is rotatably mounted on the plunger 445, so that this end portion is pivotable on the one hand and on the other hand guided along the mounting axis 234 with the plunger 445 slidably.
- the knee lever 452 is rigidly connected to the hand lever 212, wherein the knee joint 454 on the one hand and the joint between toggle 452 and plunger 445 on the other hand are arranged on different sides of the longitudinal axis of the hand lever 212. If the hand lever 212 is pivoted in the direction of the rigid hand lever 211, this has the consequence that the toggle mechanism 451 moves in the direction of its extended position, whereby the plunger 445 is pressed out of the drive part 400 (see Fig. 32 to Fig. 33 ). About a spring, which is designed here as a spiral spring 455, the hand lever 211, 212 acted upon apart.
- the toggle lever 453 is extended beyond the articulation on the housing of the drive part 400 addition, which takes place here for reasons of space with a crank.
- the extension 456 In the end region of this extension 456 facing away from the knee joint 454, the extension 456 has a part-cylindrical lateral surface formed concentrically to the pivot axis of the toggle lever 453, which is provided with a locking toothing 457.
- the ratchet 457 enters into operative connection with a locking member 458, which prevents movement of the toggle mechanism 451 from the extended position before complete passage of the pressing stroke.
- the locking member 458 is acted upon by a locking spring 459 in the reverse direction.
- the locking member 458 has completely passed through the locking teeth 457, whereby the locking member 458 can be deflected so that it disengages with the locking teeth 457, thus opening the toggle mechanism 451 is possible due to the coil spring 455, wherein the locking member 458 ratchet-like without blocking effect along the locking teeth 457 moves.
- the holding device 405 to which the cable 2 is clamped is formed by the fixing unit 19, while the holding device 406 for the assembly 7 is formed by the moving unit 17 in this case.
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Manufacturing Of Electrical Connectors (AREA)
- Connector Housings Or Holding Contact Members (AREA)
Description
- Die Erfindung betrifft ein Solarverbinder-Montagewerkzeug, welches zur Montage eines Solarverbinders verwendet wird. Bei einem derartigen Solarverbinder wird mittels einer Relativbewegung ein Steckergehäuse auf eine Baugruppe bewegt und mittels dieser Bewegung aufgepresst. Die Baugruppe ist hierbei mit einem Kabel gebildet, welches vorzugsweise mit einem Stecker verpresst ist und auf dem eine Dichtung angeordnet ist.
- Bekannt ist eine " Betriebsanleitung Solarkit Universal MC" (Rev. 2011-08-01) des Unternehmens Rennsteig Werkzeuge, in welcher ein Solarverbinder-Aufziehwerkzeug für Solarverbinder eines Typs MC3 dargestellt und hinsichtlich seiner Benutzung beschrieben ist. Bei diesem Solarverbinder-Aufziehwerkzeug wird ein konischer Aufweitdorn in eine durchgängige Ausnehmung eines Steckergehäuses lose eingesetzt. Das Steckergehäuse mit dem darin angeordneten Aufweitdorn wird dann von einer ersten Stirnseite in ein Gehäuse des Solarverbinder-Aufziehwerkzeug eingeführt. Der Aufweitdorn verfügt über einen Kupplungskopf. Dieser Kupplungskopf wird gekuppelt mit einer Zug- und Rückstellstange, welche sich bis zu einer der ersten Stirnseite des Gehäuses gegenüberliegenden zweiten Stirnseite des Solarverbinder-Aufziehwerkzeugs und über diese hinaus erstreckt, so dass die Zug- und Rückstellstange aus dem Solarverbinder-Aufziehwerkzeug auskragt. Über eine manuelle Betätigung eines gegenüber dem Gehäuse des Solarverbinder-Aufziehwerkzeugs verschwenkbaren Handhebels, in welchen ein Magazin für einen Aufweitdorn integriert ist, kann die Zug- und Rückstellstange in mehreren Betätigungsstufen mit verschwenkenden Öffnungs- und Schließbewegungen des Handhebels aus dem Gehäuse immer weiter herausbewegt werden. Angesichts der Kupplung der Zug- und Rückstellstange über den Kupplungskopf mit dem Aufweitdorn wird mit dieser Bewegung der Zug- und Rückstellstange auch der Aufweitdorn in Richtung des Steckergehäuses gezogen, bis dieser mit seinem Aufweitkonus zur Anlage an das Steckergehäuse kommt. Nun wird ein Kabel mit aufgecrimpten Stecker entsprechend dem Einführpfad des Aufweitdorns in das Gehäuse des Solarverbinder-Aufziehwerkzeugs eingeführt, bis der Stecker einen Anschlag des Aufweitdorns erreicht. Hieran anschließend wird eine gegenüber dem Gehäuse geführte Kabelklemmung auf das Kabel geklemmt und bis zu dem Anschlag in Richtung des Steckergehäuses geschoben. Durch wiederholtes stufenweise Verschwenken des Handhebels wird dann der Aufweitdorn mit Stecker und Kabel durch das Steckergehäuse gezogen, bis Stecker und Kabel ihren Zielort in dem Steckergehäuse erreicht haben. Während dieses Durchziehens des Aufweitdorns sowie des Steckers mit Kabel durch das Steckergehäuse bewegt sich das Steckergehäuse nicht. Schließlich wird das Kabel mit Stecker und Steckergehäuse aus dem Solarverbinder-Aufziehwerkzeug herausgenommen. In der Betriebsanleitung wird eine anschließende Kontrolle des ordnungsgemäßen Sitzes des Steckergehäuses auf dem Kabel und dem Stecker empfohlen.
-
US 2010/0180436 A1 offenbart ein Werkzeug, welches es ermöglichen soll, ein Werkstück in Form eines Endverbinders mit zwei möglichen unterschiedlichen Längen auf ein Kabel aufzupressen. Das Werkzeug besitzt ein in der Hand gehaltenes Gehäuse, gegenüber welchem ein einziger Handhebel verschwenkbar gelagert ist. Der Handhebel treibt über einen Kniehebelmechanismus einen Führungsschlitten an. Die Kinematik des Kniehebelmechanismus kann zwischen einer ersten Kinematik mit einem kürzeren Montagehub des Führungsschlittens und einer zweiten Kinematik mit einem längeren Montagehub des Führungsschlittens umgeschaltet werden, indem die wirksame Länge eines Kniehebels des Kniehebelmechanismus verändert werden kann. Die Veränderung der wirksamen Länge des Kniehebelmechanismus erfolgt dadurch, dass der Kniehebel in dem dem Führungsschlitten abgewandten Endbereich zwei ineinander übergehende Bohrungen besitzt, deren Mittelpunkte in Längsrichtung des Kniehebels versetzt sind und welche unterschiedliche Durchmesser aufweisen. Ein Lagerbolzen, über welchen in diesem Endbereich der Kniehebel gegenüber dem Handhebel gelagert ist, besitzt zwei Axialabschnitte mit unterschiedlichen Durchmessern, welche mit den unterschiedlichen Durchmessern der Bohrungen des Kniehebels korrespondieren. Durch Verschiebung des Lagerbolzens quer zu der Bewegungsachse des Führungsschlittens sowie quer zu der Bewegungsebene des Kniehebels und Handhebels kann wahlweise die Lagerung des Lagerbolzens in der ersten Bohrung oder zweiten Bohrung erfolgen, womit sich eine Veränderung der wirksamen Länge des Kniehebels ergibt. Je nach zu verarbeitendem Endverbinder wird somit durch Wahl der wirksamen Bohrung das Werkzeug an den jeweiligen Verbinder angepasst. Nach derartiger Anpassung wird der Verbinder auf den Führungsschlitten aufgesteckt, womit dann ein Montagehub mit der mit der Länge des Verbinders korrespondierenden Länge durch Verschwenkung des Handhebels erzeugt werden kann. -
FR 2 731 301 A1 FR 2 731 301 A1 - Weiterer Stand der Technik ist aus
US 2006/0230608 A1 undUS 5,038,461 bekannt. - Der Erfindung liegt die Aufgabe zugrunde, ein Solarverbinder-Montagewerkzeug hinsichtlich der Handhabung und der Prozesssicherheit bei der Montage eines Solarverbinders mit dem Solarverbinder-Montagewerkzeug zu verbessern.
- Die Aufgabe der Erfindung wird erfindungsgemäß mit den Merkmalen des unabhängigen Patentanspruchs gelöst. Weitere bevorzugte erfindungsgemäße Ausgestaltungen sind den abhängigen Patentansprüchen zu entnehmen.
- Gemäß dem Stand der Technik muss nach der Montage des Solarverbinders das Kabel manuell gegenüber dem Steckergehäuse mit einer Prüfkraft beaufschlagt werden, um zu prüfen, ob die Verbindung zwischen der mit Stecker, Kabel und Dichtung gebildeten Baugruppe und dem Steckergehäuse ordnungsgemäß hergestellt worden ist. Diese Prüfkraft kann durch den Benutzer erfolgen, nachdem der Solarverbinder aus dem Solarverbinder-Montagewerkzeug entfernt worden ist und indem der Benutzer das Steckergehäuse mit einer Hand hält, während der Benutzer mit der anderen Hand an dem Kabel zieht. Gemäß
FR 2 731 301 A1 - Das erfindungsgemäße Solarverbinder-Montagewerkzeug verfügt über eine erste Haltevorrichtung für die mit dem Kabel gebildete Baugruppe sowie eine zweite Haltevorrichtung für ein Steckergehäuse. Ein grundsätzlich beliebig ausgebildeter Antriebsmechanismus ist mit (mindestens) einer der Haltevorrichtungen derart gekoppelt, dass diese relativ zu der anderen Haltevorrichtung bewegt werden kann und mit einer Presskraft, welche letztendlich für die Montage des Solarverbinders genutzt werden kann, beaufschlagt wird. Der Antriebsmechanismus ist dabei derart ausgebildet, dass über diesen für ein Aufpressen des Steckergehäuses auf die Baugruppe die Haltevorrichtungen relativ zueinander, nämlich aufeinander zu, bewegbar sind. Erfindungsgemäß erfolgt während dieser Bewegung eine Beaufschlagung eines Federelements, bei welchem es sich bspw. um eine konstruktiv und hinsichtlich des Materials beliebig ausgebildete Feder oder mehrere Federn in Reihenschaltung oder Parallelschaltung handeln kann.
- Ist für das erfindungsgemäße Solarverbinder-Montagewerkzeug der Presshub beendet, womit auch die Montage der Baugruppe mit dem Steckergehäuse beendet ist, und wird die Presskraft des Antriebsmechanismus teilweise oder vollständig beseitigt, drückt das während des Presshubs beaufschlagte Federelement die Haltevorrichtungen auseinander. Da in der ersten Haltevorrichtung immer noch die Baugruppe gehalten ist und in der zweiten Haltevorrichtung immer noch das Steckergehäuse gehalten ist, werden somit auch die Baugruppe und das Steckergehäuse durch das Federelement auseinandergedrückt. Somit ist mit dem Solarverbinder-Montagewerkzeug durch das Federelement eine Prüfkraft erzeugbar.
- Die erfindungsgemäße Ausgestaltung kann zu den folgenden alternativen oder kumulativen Vorteile führen, ohne dass die genannten Vorteile zwingend auftreten müssen:
- Gemäß dem Stand der Technik muss die Prüfkraft nach Beendigung des Presshubs manuell erzeugt werden, so dass der Benutzer zunächst während des Presshubs die Kraft für die Betätigung des Antriebsmechanismus aufbringen muss und nach Beendigung des Presshubs die Kraft für die Erzeugung der Prüfkraft. Hierbei entspricht die vom Benutzer applizierte Kraft unmittelbar der Prüfkraft. Hingegen kann erfindungsgemäß während des Presshubs in dem Federelement bereits eine Art Kraftspeicher für die Prüfkraft geschaffen werden, indem über den Antriebsmechanismus während des Presshubs das Federelement mit der Prüfkraft gespannt wird. Darüber hinaus wirkt zwischen dem Benutzer und dem Federelement der Antriebsmechanismus, so dass je nach Ausgestaltung des Antriebsmechanismus auch eine Übersetzung oder Untersetzung der von dem Benutzer aufzubringenden Kraft zu der Prüfkraft in dem Federelement erfolgen kann.
- Über das während des Presshubs beaufschlagte Federelement kann eine zusätzliche Beeinflussungsmöglichkeit der Betätigungskinematik, insbesondere des Betätigungskraftverlaufs, des Solarverbinder-Montagewerkzeugs geschaffen sein.
- Für den Stand der Technik hängt der Betrag der Prüfkraft und die Verlaufskurve für die Aufbringung der Prüfkraft von der manuellen Krafterzeugung durch den Benutzer ab. Hingegen wird erfindungsgemäß die Prüfkraft hinsichtlich des Betrags und/oder des Verlaufs vorgegeben durch das Federelement, wodurch die Aufbringung einer zu kleinen oder zu großen Prüfkraft zuverlässig vermieden werden kann und somit die Prozesssicherheit erhöht werden kann.
- Erfindungsgemäß kann eine Erhöhung des Automatisierungsgrads der Handhabung des Solarverbinder-Montagewerkzeugs erfolgen, da für die Applikation der Prüfkraft nicht die Entnahme des Solarverbinders aus dem Solarverbinder-Montagewerkzeug erforderlich ist oder zusätzliche Betätigungsschritte des Solarverbinder-Montagewerkzeugs erforderlich sind, um die Prüfkraft zu erzeugen.
- Während zuvor auch eine Betätigung des Antriebsmechanismus von Hand durch den Benutzer des Solarverbinder-Montagewerkzeugs beschrieben worden ist, umfasst die Erfindung auch ein Solarverbinder-Montagewerkzeug, welches mittels Hilfsenergie, beispielsweise einem elektrischen oder hydraulischen Antrieb, betätigt wird.
- Die Beendigung des Presshubs und die Beseitigung der Presskraft des Antriebsmechanismus kann auf beliebige Weise erfolgen. Beispielsweise kann dieses manuell durch den Benutzer herbeigeführt werden. Ebenfalls möglich ist eine automatische Erkennung der Beendigung des Presshubs sowie eine automatische Beseitigung der Presskraft. In einer besonderen Ausgestaltung der Erfindung erfolgt dieses bewegungsgesteuert, beispielsweise dann, wenn der Presshub vollständig durchlaufen ist. Alternativ oder zusätzlich kann eine Kraftsteuerung erfolgen, indem die Beendigung des Presshubs gegeben ist, wenn ein vorgegebener Zielwert der Presskraft erreicht oder überschritten wird.
- Wird die Presskraft zumindest teilweise beseitigt, werden die Kraftverhältnisse zwischen den Haltevorrichtungen und damit zwischen der Baugruppe und dem Steckergehäuse alleine oder vorrangig bestimmt durch das Federelement, womit der Betrag der Prüfkraft durch das Federelement vorgegeben oder zumindest mitbestimmt ist. Mit einer durch die Prüfkraft verursachten Relativbewegung zwischen Baugruppe und Steckergehäuse, beispielsweise wegen eines Setzens der Verbindung und elastischer Verformungen, kann sich die Prüfkraft je nach der Kennlinie des Federelements verändern. Unter Umständen kann gewünscht sein, dass weitere Anforderungen hinsichtlich der Applikation der Prüfkraft bestehen. Insbesondere für den Fall, dass eine "stoßartige" Applikation der Prüfkraft mit einer hohen Aufbringungsgeschwindigkeit derselben vermieden werden soll, schlägt eine weitere Ausgestaltung der Erfindung vor, dass in dem Solarverbinder-Montagewerkzeug ein Dämpfungselement vorhanden ist, bei welchem es sich bspw., um einen Öl- oder Gasdruckdämpfer handeln kann. Dieses Dämpfungselement wirkt vorzugsweise zwischen den Haltevorrichtungen, wobei dieses beispielsweise dem Federelement parallel geschaltet sein kann. Über das Dämpfungselement kann die zwischen Steckergehäuse und Baugruppe wirkende Prüfkraft beeinflusst werden. Hierbei kann das Dämpfungselement eine beliebige Dämpfungscharakteristik, insbesondere eine geschwindigkeitsproportionale Dämpfung, besitzen. Durch den Einsatz des Dämpfungselements kann der Verlauf der Prüfkraft auch zumindest teilweise unabhängig gemacht werden von dem Verlauf der Beseitigung der Presskraft des Antriebsmechanismus mit der Beendigung des Presshubs, wodurch sich definierte Bedingungen für die Applikation der Prüfkraft ergeben.
- Die Prozesssicherheit kann für eine Weiterbildung des Solarverbinder-Montagewerkzeugs noch weiter erhöht werden, wenn in dieser eine Messeinrichtung vorhanden ist, welche die relative Verschiebung der beiden Haltevorrichtungen infolge der Beaufschlagung durch das Federelement bei Beaufschlagung des Steckergehäuses und der Baugruppe mit der Prüfkraft erfasst. Über die Messeinrichtungen können beispielsweise unterschiedliche Setzverhalten oder unterschiedliche Elastizitäten von verschiedenen Solarverbindern, die mit dem Solarverbinder-Montagewerkzeug montiert worden sind, erfasst werden. Um lediglich ein einfaches, nicht beschränkendes Beispiel zu nennen, ergibt sich ohne ein Setzverhalten für einen ordnungsgemäß montierten Solarverbinder eine geringe, von der Messeinrichtung erfasste relative Verschiebung, während sich für den anderen, nicht ordnungsgemäß montierten Solarverbinder mit einem Setzverhalten eine größere relative Verschiebung ergibt, die mittels der Messeinrichtung erkannt werden kann. Unter Umständen kann über die Messeinrichtung auch erkannt werden, ob Bauelemente des Solarverbinders außerhalb des Toleranzbereichs verwendet worden sind, Bauelemente in falsche Orientierung zueinander miteinander montiert sind oder falsche Bauelemente miteinander montiert sind.
- Die Messeinrichtung kann grundsätzlich beliebig ausgebildet sein. Für eine besonders einfache erfindungsgemäße Ausgestaltung ist die Messeinrichtung als vom Benutzer optisch ablesbare Messeinrichtung ausgebildet. Für diese Ausgestaltung besitzt die Messeinrichtung eine Markierung, beispielsweise einen Pfeil, welche bzw. welcher an der Haltevorrichtung angebracht ist, die infolge des Federelements mit Beendigung des Presshubs gegenüber einem Gehäuse des Solarverbinder-Montagewerkzeug bewegt wird. Des Weiteren verfügt die Messeinrichtung über eine Markierung, beispielsweise einen Gegen-Pfeil, einen markierten Bereich oder eine Ableseskala, welche an dem Gehäuse angebracht ist. Von dem Benutzer kann dann optisch auf Grundlage der relativen Position oder des Abstands der Markierungen zueinander am Ende der Applikation der Prüfkraft abgelesen werden, welche relative Verschiebung sich zwischen den beiden Haltevorrichtungen ergeben hat.
- Grundsätzlich möglich ist, dass der Antriebsmechanismus
- die Haltevorrichtung bewegt, welche die Baugruppe hält,
- die Haltevorrichtung bewegt, welche das Steckergehäuse hält, oder
- beide Haltevorrichtungen
- Während grundsätzlich eine beliebige Kinematik für den Antriebsmechanismus genutzt werden kann, schlägt die Erfindung in weiterer Ausgestaltung vor, dass der Antriebsmechanismus mit einem Kniehebel gebildet ist. Der Einsatz eines Kniehebels hat sich für die Montage von Solarverbindern als vorteilhaft herausgestellt, da mittels des Kniehebels auch mit verhältnismäßig kleinen Betätigungskräften große Presskräfte herbeigeführt werden können. Nähert sich der Kniehebel mit dem Ende des Presshubs seiner Strecklage an, kann die Übersetzung der von dem Benutzer aufgebrachten Kraft zu der Presskraft, welche auf Steckergehäuse und Baugruppe wirkt, kontinuierlich vergrößert werden, womit zum Beginn des Presshubs mit kleinen erforderlichen Presskräften eine Bewegung der Handhebel eine verhältnismäßig große Relativbewegung der Haltevorrichtungen und damit des Steckergehäuses und der Baugruppe herbeiführt, während gegen Ende des Presshubs fein dosierbar dieselbe Bewegung der Handhebel zu großen Presskräften und einer verhältnismäßig kleinen Relativbewegung zwischen den Haltevorrichtungen führt.
- In weiterer Ausgestaltung der Erfindung ist ein weiteres Federelement vorhanden, über welches der Antriebsmechanismus nach dem Durchlaufen des Presshubs in seine Ausgangsstellung rückführbar ist.
- Eine weitere Erhöhung der Prozesssicherheit kann erzielt werden, wenn (zusätzlich zu den genannten Haltevorrichtungen) eine Prüf- und/oder Halteeinrichtung vorhanden ist. Mittels der Prüf- und/oder Halteeinrichtung kann geprüft werden, ob eine Baugruppe mit richtiger Orientierung in das Solarverbinder-Montagewerkzeug eingelegt ist. Alternativ oder zusätzlich kann über die Prüf- und/oder Halteeinrichtung die Baugruppe in der richtigen Orientierung in dem Solarverbinder-Montagewerkzeug gehalten werden.
- Grundsätzlich möglich ist, dass die Haltevorrichtungen des Solarverbinder-Montagewerkzeugs individualisiert sind für eine Bauform eines Steckergehäuses und/oder eine Bauform einer Baugruppe. Ebenfalls möglich ist aber, dass die Haltevorrichtungen für unterschiedliche Bauformen geeignet sind. Für einen besonderen erfindungsgemäßen Vorschlag besitzt die Haltevorrichtung für das Steckergehäuse einen Haltekörper, der zwei unterschiedliche Betriebsstellungen besitzt: In einer ersten Betriebsstellung kann der Haltekörper ein Steckergehäuse mit einer ersten Geometrie halten. Hingegen kann der Haltekörper in der zweiten Betriebsstellung ein Steckergehäuse mit einer zweiten Geometrie halten. Somit erfordert die Nutzung des Solarverbinder-Montagewerkzeugs für unterschiedliche Bauformen des Solarverbinders lediglich die Veränderung der Betriebsstellung des Haltekörpers.
- Eine weitere Erhöhung der Prozesssicherheit kann bei der Benutzung des Solarverbinder-Montagewerkzeugs gewährleistet werden, wenn der Antriebsmechanismus ein Zwangsgesperre aufweist. Unter einem Zwangsgesperre wird ein Mechanismus verstanden, welcher während des Presshubs eine einmal erreichte Relativstellung der Haltevorrichtungen sichert, aber mit Fortsetzung des Presshubs eine weitere Annäherung der Haltevorrichtungen aneinander ermöglicht. Erst mit Beendigung des Presshubs ermöglicht das Zwangsgesperre, dass die Haltevorrichtungen wieder voneinander weg bewegt werden. Durch Einsatz des Zwangsgesperres kann vermieden werden, dass der Presshub lediglich unvollständig durchlaufen wird, womit auch eine nicht vollständige Montage erfolgen würde.
- Für eine bevorzugte Weiterbildung des erfindungsgemäßen Solarverbinder-Montagewerkzeugs ist eine Haltevorrichtung, vorzugsweise die Haltevorrichtung für die Baugruppe, über ein sich außerhalb eines Gehäuses des Solarverbinder-Montagewerkzeugs angeordnetes Betätigungsorgan von einer Haltestellung, insbesondere einer Klemmstellung, in eine gelöste Stellung und/oder von einer gelösten Stellung in eine Haltestellung überführbar. Die Haltevorrichtung ist hierbei mit federbeaufschlagten Klemmbacken gebildet, die je nach Ausgestaltung durch die Feder in Richtung der gelösten Stellung oder in Richtung der Haltestellung beaufschlagt sein können.
- Vorteilhafte Weiterbildungen der Erfindung ergeben sich aus den Patentansprüchen, der Beschreibung und den Zeichnungen. Die in der Beschreibung genannten Vorteile von Merkmalen und von Kombinationen mehrerer Merkmale sind lediglich beispielhaft und können alternativ oder kumulativ zur Wirkung kommen, ohne dass die Vorteile zwingend von erfindungsgemäßen Ausführungsformen erzielt werden müssen. Ohne dass hierdurch der Gegenstand der beigefügten Patentansprüche verändert wird, gilt hinsichtlich des Offenbarungsgehalts der ursprünglichen Anmeldungsunterlagen und des Patents Folgendes: weitere Merkmale sind den Zeichnungen - insbesondere den dargestellten Geometrien und den relativen Abmessungen mehrerer Bauteile zueinander sowie deren relativer Anordnung und Wirkverbindung - zu entnehmen. Die Kombination von Merkmalen unterschiedlicher Ausführungsformen der Erfindung oder von Merkmalen unterschiedlicher Patentansprüche ist ebenfalls abweichend von den gewählten Rückbeziehungen der Patentansprüche möglich und wird hiermit angeregt. Dies betrifft auch solche Merkmale, die in separaten Zeichnungen dargestellt sind oder bei deren Beschreibung genannt werden. Diese Merkmale können auch mit Merkmalen unterschiedlicher Patentansprüche kombiniert werden. Ebenso können in den Patentansprüchen aufgeführte Merkmale für weitere Ausführungsformen der Erfindung entfallen.
- Die in den Patentansprüchen und der Beschreibung genannten Merkmale sind bezüglich ihrer Anzahl so zu verstehen, dass genau diese Anzahl oder eine größere Anzahl als die genannte Anzahl vorhanden ist, ohne dass es einer expliziten Verwendung des Adverbs "mindestens" bedarf. Wenn also beispielsweise von einem Element die Rede ist, ist dies so zu verstehen, dass genau ein Element, zwei Elemente oder mehr Elemente vorhanden sind. Diese Merkmale können durch andere Merkmale ergänzt werden oder die einzigen Merkmale sein, aus denen das jeweilige Erzeugnis besteht.
- Die in den Patentansprüchen enthaltenen Bezugszeichen stellen keine Beschränkung des Umfangs der durch die Patentansprüche geschützten Gegenstände dar. Sie dienen lediglich dem Zweck, die Patentansprüche leichter verständlich zu machen.
- Im Folgenden wird die Erfindung anhand in den Figuren dargestellter bevorzugter Ausführungsbeispiele weiter erläutert und beschrieben. Hierbei ist in den
Fig. 2 bis 20 eine erste Ausführungsform eines Solarverbinder-Montagewerkzeugs dargestellt, während in denFig. 21 bis 33 eine zweite Ausführungsform eines Solarverbinder-Montagewerkzeugs dargestellt ist. - Fig. 1
- zeigt grob schematisiert einen Solarverbinder, der mit einem Kabel, einem Stecker, einer Dichtung und einem Steckergehäuse gebildet ist.
- Fig. 2
- zeigt in einer räumlichen Darstellung ein Solarverbinder-Montagewerkzeug in einer ersten Ausführungsform ohne eingelegte Bauelemente eines Solarverbinders.
- Fig. 3
- zeigt das Solarverbinder-Montagewerkzeug gemäß
Fig. 2 in räumlicher Darstellung in teildemontiertem Zustand. - Fig. 4
- zeigt das Solarverbinder-Montagewerkzeug gemäß
Fig. 2 und3 in räumlicher Darstellung in weiter teildemontiertem Zustand. - Fig. 5
- zeigt in einem Längsmittelschnitt das Solarverbinder-Montagewerkzeug gemäß
Fig. 1-4 . - Fig. 6
- zeigt in einer Seitenansicht Bestandteile einer in dem Solarverbinder-Montagewerkzeug gemäß
Fig. 1-4 eingesetzten Bewegungseinheit. - Fig. 7
- zeigt in einem Teilquerschnitt VII-VII das Solarverbinder-Montagewerkzeug gemäß
Fig. 1-5 . - Fig. 8
- zeigt in einem Querschnitt VIII-VIII das Solarverbinder-Montagewerkzeug gemäß
Fig. 1-5 . - Fig. 9
- zeigt in einem Querschnitt IX-IX das Solarverbinder-Montagewerkzeug gemäß
Fig. 1-5 . - Fig. 10
- zeigt im Detail eine Fixiereinheit des Solarverbinder-Montagewerkzeugs gemäß
Fig. 1-5 in räumlicher Darstellung mit teildemontiertem Gehäuse. - Fig. 11
- zeigt die Fixiereinheit gemäß
Fig. 10 in räumlicher Darstellung in weiter demontiertem Zustand. - Fig. 12
- zeigt die Fixiereinheit gemäß
Fig. 11 in räumlicher Darstellung in weiter demontiertem Zustand. - Fig. 13
- zeigt die Fixiereinheit gemäß
Fig. 12 in räumlicher Darstellung in weiter demontiertem Zustand. - Fig. 14
- zeigt das Solarverbinder-Montagewerkzeug in teildemontiertem Zustand in einer räumlichen Ansicht, wobei in dieses eine Baugruppe mit einem Kabel, einer Dichtung und einem Stecker eingelegt ist.
- Fig. 15
- zeigt Bauelemente einer Fixiereinheit eines Solarverbinder-Montagewerkzeugs von unten, wobei die Fixiereinheit manuell in die gelösten Stellung betätigt ist.
- Fig. 16
- zeigt Bauelemente der Fixiereinheit gemäß
Fig. 15 , wobei sich die Fixiereinheit in der Fixierstellung befindet. - Fig. 17
- zeigt das Solarverbinder-Montagewerkzeug in teildemontiertem Zustand in räumlicher Darstellung, wobei in dieses eine Baugruppe sowie ein Steckergehäuse eingelegt sind und noch keine Montage des Steckergehäuses mit der Baugruppe erfolgt ist.
- Fig. 18
- zeigt eine
Fig. 17 entsprechende Darstellung, hier aber nach Beendigung der Montage des Steckergehäuses mit der Baugruppe durch Aufschieben des Steckergehäuses auf die Baugruppe. - Fig. 19
- zeigt das Solarverbinder-Montagewerkzeug gemäß
Fig. 17 und18 mit Überschreiten der Vorspannkraft des Federelements, über welches die Fixiereinheit abgestützt ist. - Fig. 20
- zeigt Bauelemente der Fixiereinheit in einer räumlichen Ansicht.
- Fig. 21 bis 27
- zeigen eine zweite Ausführungsform eines Solarverbinder-Montagewerkzeugs in räumlichen Ansichten in unterschiedlichen Betriebsstellungen des Solarverbinder-Montagewerkzeug.
- Fig. 28 und 29
- zeigen das Solarverbinder-Montagewerkzeug gemäß
Fig. 21 bis 27 in unterschiedlichen Betriebsstellungen in einer Ansicht von unten. - Fig. 30 und 31
- zeigen unterschiedliche Horizontalschnitte durch das Solarverbinder-Montagewerkzeug gemäß
Fig. 21 bis 29 . - Fig. 32 und 33
- zeigen unterschiedliche Vertikalschnitte durch das Solarverbinder-Montagewerkzeug gemäß
Fig. 21 bis 31 in unterschiedlichen Betriebsstellungen. -
Fig. 1 zeigt exemplarisch und stark schematisiert einen Solarverbinder 1. Auf einem Kabel 2 ist in einem definierten Abstand 3 von einer Stirnseite 4 eine Dichtung 5 angeordnet. Der der Dichtung 5 benachbarte Endbereich des Kabels 2 ist abisoliert und über ein Crimpwerkzeug mit einem Stecker 6 vercrimpt. Auf eine derart gebildete, vormontierte Baugruppe 7 wird mittels eines Solarverbinder-Montagewerkzeugs 8 ein Steckergehäuse 9 bewegt, aufgeschoben oder aufgepresst. In der inFig. 1 dargestellten fertig montierten Stellung des Solarverbinders 1 verrastet eine Rastnase 10 hinter den Stecker 6. Die Dichtung 5 ist radial zwischen der Mantelfläche des Kabels 2 und der abgestuften Innenfläche 99 des Steckergehäuses 9 verpresst. Hierdurch soll eine Abdichtung des Solarverbinders 1 gewährleistet sein. Darüber hinaus erfolgt über die Verpressung der Dichtung 5 zwischen Steckergehäuse 9 und Kabel 2 eine Aufnahme von auf das Kabel 2 im Betrieb wirkenden Kräften, wodurch auch eine "Zugentlastung" erfolgen kann. -
Fig. 2 bis 20 zeigen eine erste Ausführungsform des Solarverbinder-Montagewerkzeugs 8: -
Fig. 2 zeigt das Solarverbinder-Montagewerkzeug 8 in einer räumlichen Darstellung. Das Solarverbinder-Montagewerkzeug 8 besitzt ein "pistolenförmiges" Design, wobei der feste "Pistolengriff" einen gehäusefesten Handhebel 11 bildet, während der "Abzug" entsprechend der Länge des Handhebels 11 verlängert ist und einen verschwenkbaren Handhebel 12 bildet. Der "Lauf" gibt eine Montageachse 34 mit einer Montagerichtung 97 vor, entlang welcher in dem Solarverbinder-Montagewerkzeug 8 ein Bewegen, hier Aufschieben des Steckergehäuses 9 auf die Baugruppe 7 erfolgt. Ein Gehäuse 13 des Solarverbinder-Montagewerkzeugs 8 ist mit zwei Halbschalen 14, 15 gebildet, welche eine Teilungsebene in einer Längsmittelebene des Solarverbinder-Montagewerkzeugs 8 bilden. Das Solarverbinder-Montagewerkzeug 8 verfügt über einen Antriebsmechanismus 16, eine Bewegungseinheit 17, eine Prüfeinrichtung 18 und eine Fixiereinheit 19. - Der Antriebsmechanismus 16 ist gebildet mit dem verschwenkten Handhebel 12, welcher innerhalb des Gehäuses 13 starr mit einer Antriebskurbel 20 verbunden ist (
Fig. 3 ). Wie insbesondere inFig. 4 zu erkennen ist, besitzt für das dargestellte Ausführungsbeispiel der Handhebel 12 in dem mit der Antriebskurbel 20 verbundenen Endbereich eine Abflachung, im Bereich welcher der Handhebel 12 über einen Verbindungsbolzen 21 sowie einen Schwenkbolzen 22 antriebsfest mit zwei beidseits der Abflachung angeordneten plattenförmigen Antriebskurbelplatten 23, 24 verbunden, welche gemeinsam die Antriebskurbel 20 bilden. Der Schwenkbolzen 22 ist in den aus den Antriebskurbelplatten 23, 24 auskragenden Endbereichen verschwenkbar in den Halbschalen 14, 15 des Gehäuses 13 gelagert, so dass der Handhebel 12 mit der Antriebskurbel 20 um eine durch den Schwenkbolzen 22 vorgegebene Schwenkachse verschwenkbar ist. Die Antriebskurbel 20, hier die Antriebskurbelplatten 23, 24, besitzt/besitzen abseits des Schwenkbolzens 22 einen Fortsatz 25 (Fig. 5 ), an welchem ein Federfußpunkt einer Zugfeder 26 angelenkt ist. Der andere Federfußpunkt der Zugfeder 26 ist unter Vorspannung an einem Bolzen 27 abgestützt, welcher in den Halbschalen 14, 15 des Gehäuses 13 endseitig gelagert ist. Die Federvorspannung der Zugfeder 26 bewirkt, dass der Handhebel 12 inFig. 5 mit einem Drehmoment gegen den Uhrzeigersinn beaufschlagt ist, so dass der Handhebel 12 von dem Handhebel 11 weg beaufschlagt wird. Handhebel 12 und Antriebskurbel 20 bilden gemeinsam einen Hebel, wobei Handhebel 12 einerseits und Antriebskurbel 20 auf gegenüberliegenden Seiten des mit dem Schwenkbolzen 22 gebildeten Schwenklagers angeordnet sind. InFig. 4 und5 ist zu erkennen, dass in dem dem Schwenkbolzen 22 abgewandten Endbereich der Antriebskurbel 20 von den Antriebskurbelplatten 23, 24 ein Schwenkbolzen 28 gehalten ist. Auf dem Schwenkbolzen 28 ist zwischen den Antriebskurbelplatten 23, 24 ein Zahnstößel 29 verschwenkbar gelagert. Die Schwenkachse des Zahnstößels 29 ist hierbei parallel zu der durch den Schwenkbolzen 22 vorgegebenen Schwenkachse orientiert. Der Zahnstößel 29 erstreckt sich von dem Schwenkbolzen 28 nach vorne, wobei der Zahnstößel 29 durch ein Federelement, hier eine über einen gehäusefesten Bolzen 30 abgestützten Spiralschenkelfeder 31, nach oben beaufschlagt ist. Der Zahnstößel 29 besitzt in seinem dem Schwenkbolzen 28 abgewandten Endbereich ein Zahnsegment 32. Das Zahnsegment 32 tritt in Wechselwirkung mit einem Führungsschlitten 33, welcher verschieblich in Richtung der Montageachse 34 gegenüber dem Gehäuse 13 geführt ist. Der Führungsschlitten 33 verfügt auf seiner Unterseite über eine zahnstangenartige Verzahnung 34, deren Längserstreckung in Richtung der Montageachse 34 zumindest dem gewünschten Montagehub des Solarverbinder-Montagewerkzeugs 8 entspricht. Das Zahnsegment 32 greift infolge der Beaufschlagung durch die Spiralschenkelfeder 31 in die Verzahnung 35 ein. Die Zahnkonturen des Zahnsegments 32 und der Verzahnung 35 sind derart gewählt, dass der Führungsschlitten 33 manuell inFig. 5 nach rechts in Richtung der Montageachse 34 verschoben werden kann, wobei dabei das Zahnsegment 32 ratschenartig entlang der Verzahnung 35 gleitet und wiederholt der Zahnstößel 39 unter Beaufschlagung der Spiralschenkelfeder 31 nach unten gedrückt wird, so dass das Zahnsegment 32 sukzessive Gegen-Zahnsegmente der Verzahnung 35 überwinden kann. Hingegen sperrt die Wechselwirkung zwischen Zahnsegment 32 und Verzahnung 35 eine manuelle Bewegung des Führungsschlittens 33 inFig. 5 entgegen der Montagerichtung 97 nach links, wenn nicht durch ergänzende, im Folgenden näher beschriebene Maßnahmen der Zahnstößel 39 aus der Verzahnung 35 manuell ausgehoben wird. Eine zusätzliche Sicherung einer einmal erreichten Stellung des Führungsschlittens 33 erfolgt über ein Zwangsgesperre 36. Hierzu ist eine Sperrklinke 37 über eine Schwenkbolzen 38 verschwenkbar gegenüber dem Gehäuse 13 gelagert. Über ein ebenfalls an dem Gehäuse 13 abgestütztes Federelement, hier eine Spiralschenkelfeder 39, wird auch die Sperrklinke 37 mit einem Zahnsegment 40 derselben gegen die Verzahnung 35 beaufschlagt. Der Zahnstößel 29 und die Sperrklinke 37 sind hierbei in Richtung der Montageachse 34 versetzt, aber mit einer gewissen Überlappung angeordnet, während diese quer zur Montageachse und quer zur Längsmittelebene versetzt sind. In dem dem Schwenkbolzen 38 gegenüberliegenden Endbereich verfügt die Sperrklinke 37 über einen Betätigungsbolzen 31, welcher einen Führungsschlitz 42 in der Halbschale 15 des Gehäuses 13 durchsetzt. Infolge der Beaufschlagung durch die Spiralschenkelfeder 39 befindet sich ohne Aufbringung manueller Kräfte auf den Betätigungsbolzen 41 die Sperrklinke 37 in der inFig. 5 dargestellten oberen Endlage, in welcher veranlasst durch die Spiralschenkelfeder 39 das Zahnsegment 40 in Wirkverbindung mit der Verzahnung 35 treten kann, um die einmal erreichte axiale Position des Führungsschlittens 33 zu sichern. Wird hingegen der Betätigungsbolzen 41 manuell außerhalb des Gehäuses 13 nach unten gedrückt, kommt das Zahnsegment 40 der Sperrklinke 37 außer Eingriff mit der Verzahnung 35, womit die Sicherungswirkung des Zwangsgesperres 36 aufgehoben werden kann. Über einen Mitnehmerbolzen 43 wird bei manueller Betätigung des Betätigungsbolzens 41 nach unten von der Sperrklinke 37 auch der Zahnstößel 49 nach unten mitgenommen, so dass auch das Zahnsegment 32 des Zahnstößels 29 außer Eingriff mit der Verzahnung 35 kommt. Zwischen Führungsschlitten 33 und dem Gehäuse 13 wirkt ein Federelement 44, welches den Führungsschlitten 33 entgegen der Montagerichtung 97 nach hinten zieht, wenn sowohl das Zahnsegment 32 als auch das Zahnsegment 40 außer Eingriff mit der Verzahnung 35 ist. - Die Bewegungseinheit 17, welche auch als Halte-, Antriebs und/oder Führungseinheit ausgebildet sein kann, ist mit dem Führungsschlitten 33 gebildet. Der Führungsschlitten 33 besitzt in dem in Montagerichtung 97 rückwärtigen Endbereich einen U-förmigen Querschnitt, dessen Grundschenkel von einer Grundplatte 45 und dessen Seitenschenkel von zwei parallelen Seitenplatten 46, 47 ausgebildet sind. Während die Seitenplatte 46 über die gesamte Länge des Führungsschlittens 33 durchgehend ausgebildet ist, endet die Seitenplatte 47 ungefähr mittig, sodass im vorderen Endbereich der Führungsschlitten 33 lediglich einen L-förmigen Querschnitt besitzt. Die Grundplatte 45 ist mit einer geeigneten Konturierung 48 ausgestattet, welche an die Außenkontur des Steckergehäuses 9 angepasst ist.
Fig. 6 zeigt eine Seitenansicht des hier transparent dargestellten Führungsschlittens 33 mit einem darin angeordneten Haltekörper 49. Der Haltekörper 49 ist drehfest mit einem sich quer zur Montageachse 34 erstreckenden Schwenkbolzen 50 verbunden, der durch fluchtende Durchgangsbohrungen 51, 52 der Seitenplatten 46, 47 sowie durch parallel zur Montageachse 34 orientierte Führungsschlitze 53, 54 des Gehäuses 13 hindurch tritt und in den Endbereichen drehfest mit Flügelmuttern 55, 56 verbunden ist (Fig. 7 ). InFig. 2 und14 befindet sich der Haltekörper 49 in einer ersten Betriebsstellung, in welcher der Haltekörper 49 ein Steckergehäuse 9 mit einer ersten Geometrie halten kann. Dieses Halten kann darin bestehen, dass das Steckergehäuse 9 an einer Stirnseite 57 des Haltekörpers 49 anliegt und abgestützt ist. Ebenfalls möglich ist, dass die Stirnseite 57 geeignet konturiert ist, um das Halten des Steckergehäuses 9 zu ermöglichen, eine Ausnehmung besitzt, in welche das Steckergehäuse 9 eintritt oder der Haltekörper 49 von einem hülsenartigen Steckergehäuse 9 "umgriffen" wird. Mit einer Verdrehung mindestens einer Flügelmutter 55 kann der Haltekörper 49 um eine durch den Schwenkbolzen 50 vorgegebene Schwenkachse inFig. 6 gegen den Uhrzeigersinn um 180° in eine zweite Betriebsstellung verschwenkt werden, in welcher der Haltekörper 49 ein Steckergehäuse 9 mit einer von der ersten Geometrie abweichenden zweiten Geometrie halten kann. In dieser zweiten Betriebsstellung ist dem Steckergehäuse 9 dann die der Stirnseite 57 gegenüberliegende Stirnseite 58 zugewandt. Auch hier kann das Halten des Steckergehäuses lediglich in einer Abstützung an der Stirnseite 58, der Wechselwirkung durch entsprechende Konturierung der Stirnseite 58 und des Steckergehäuses 9, Eintritt des Steckergehäuses 9 in eine Ausnehmung der Stirnseite 58 oder Umgreifen des Haltekörpers 49 durch das Steckergehäuse 9 bestehen. Für das dargestellte Ausführungsbeispiel ist der Schwenkbolzen 50 exzentrisch in dem Haltekörper 49 derart angeordnet, dass der Abstand 59 der Stirnseite 57 von der Schwenkachse des Schwenkbolzens 50 größer ist als der Abstand 60 der Schwenkachse des Schwenkbolzens 50 von der Stirnseite 58. Dies hat zur Folge, dass je nach Betriebsstellung des Haltekörpers die Abstützung eines Steckergehäuses 9 an unterschiedlichen Orten entlang der Montageachse 34 erfolgt, womit unterschiedlichen Längserstreckungen unterschiedlicher Steckergehäuse 9, insbesondere infolge eines männlichen und eines weiblichen Steckergehäuses, Rechnung getragen werden kann. Beispielsweise zeigtFig. 17 ein männliches Steckergehäuse 9, welches einen Fortsatz 61 besitzt, im Bereich dessen das Steckergehäuse 9 an der Stirnseite 58 abgestützt ist. Findet hingegen ein entsprechendes weibliches Steckergehäuse Einsatz, welches nicht über den Fortsatz 61 verfügt, wird die Betriebsstellung des Haltekörpers 49 derart verändert, dass dieses Steckergehäuse 9 an der Stirnseite 57 abgestützt wird. In diesem Fall kann die Differenz der Abstände 59, 60 der Länge des Fortsatzes 61 entsprechen, um welchen das männliche Steckergehäuse 9 länger ist als das weibliche Steckergehäuse 9. Möglich ist, dass der Haltekörper 49 mit seiner Unterseite in den beiden Betriebsstellungen an der Grundplatte 45 abgestützt ist. Unter Umständen erfolgt eine zusätzliche Sicherung der Betriebsstellungen des Haltekörpers 49, beispielsweise durch eine Rast- oder Verriegelungseinrichtung. Hierzu kann quer zur Montageachse 34 in dem Haltekörper 49 (oder in einer Seitenplatte 46, 47) ein Rastelement elastisch abgestützt sein, welches in den Betriebsstellungen in eine korrespondierende Ausnehmung der Seitenplatte 46, 47 (oder des Haltekörpers 49) einrastet. - Wie erläutert kann über eine Verdrehung der Flügelmuttern 55, 56 die Veränderung der Betriebsstellung des Haltekörpers 49 verursacht werden. Der Schwenkbolzen 50 besitzt gemeinsam mit dem Haltekörper 49 sowie dem Führungsschlitten 33 einen in Richtung der Montageachse 34 und durch die Führungsschlitze 53, 54 vorgegebenen (weiteren) Freiheitsgrad. Eine manuelle Beaufschlagung der Flügelmuttern 55, 56 in Montagerichtung 97 führt dazu, dass als eine Einheit der Führungsschlitten 33 mit Haltekörper 49 und dem an dem Haltekörper 49 abgestützten Steckergehäuse 9 in Montagerichtung 97 nach vorne geschoben werden, wobei sich die Zahnsegmente 40, 32 ratschenartig entlang der Verzahnung 35 bewegen.
- Die Fixiereinheit 19 ist im vorderen Endbereich des "Laufs" des Solarverbinder-Montagewerkzeugs 8 angeordnet und dient dem Positionieren und Halten der vormontierten Baugruppe 7. Die Fixiereinheit 19 ist in unterschiedlichen Demontagestufen insbesondere dargestellt in den
Fig. 10 bis 13 sowie 15, 16 und 20. Die Fixiereinheit 19 ist mit einem Antriebskörper 62 gebildet, welcher hier plattenförmig ausgebildet ist, ausschließlich einen Freiheitsgrad parallel zur Montageachse 34 besitzt und gegenüber einem Führungsschlitten 93 geführt ist. Über ein Federelement 63 ist der Führungsschlitten 93 entgegen der Montagerichtung 97 nach hinten unter Vorspannung gegen einen Anschlag 64 des Gehäuses 13 vorgespannt. Wird auf den Führungsschlitten 93 eine Kraft in Montagerichtung 97 ausgeübt, welche größer ist als die Vorspannung des Federelements 63, kann sich der Führungsschlitten 93 von dem Anschlag 64 des Gehäuses 13 lösen, sodass eine Bewegung des Führungsschlitten 93 in Montagerichtung 97 erfolgt. Ein Betätigungsorgan 65, hier ein Betätigungsrad 66, kann quer zur Montageachse 34 durch Aufbringung einer Betätigungskraft 67 in Richtung der inFig. 15 dargestellten gelösten Stellung betätigt werden, während das Betätigungsorgan 65 infolge einer Feder ohne Aufbringung der Betätigungskraft 67 in die inFig. 16 dargestellte Fixierstellung zurückkehrt. Mit der Bewegung des Betätigungsorgans 65 zwischen den beiden genannten Stellungen bewegt wird ein Nutkörper 68. Der Nutkörper 68 besitzt auf seiner zu dem Antriebskörper 62 weisenden Unterseite ein Langloch oder eine Langnut 69, dessen oder deren Längsachse sowohl gegenüber der Montageachse 34 als auch gegenüber der Betätigungsrichtung des Betätigungsorgans 65 geneigt ist. In das Langloch oder die Langnut 69 greift ein Gleitstein oder Stift 70 ein, welcher sich von dem Antriebskörper 62 nach oben erstreckt. Mit dem Langloch 69 und dem Stift 70 ist eine Antriebsverbindungsstufe 71 gebildet, mittels welcher angesichts der geneigten Orientierung des Langlochs 69 eine Bewegung des Nutkörpers 68, veranlasst durch die Betätigung des Betätigungsorgans 65, quer zur Montageachse 34 umgewandelt wird in eine Bewegung des Antriebskörpers 62 koaxial zur Montageachse 34. Der Antriebskörper 62 besitzt zwei V-förmig angeordnete Langlöcher 72, 73, welche sich symmetrisch auf beiden Seiten der Montageachse 34 erstrecken. Die Längsachse der Langlöcher 72, 73 ist sowohl geneigt gegenüber der Montageachse 34 als auch zu der Betätigungsrichtung des Betätigungsorgans. Quer zur Montageachse 34 sind gegenüber dem Führungsschlitten zwei Klemmbacken 74, 75 geführt, die insbesondere inFig. 11 zu erkennen sind. Die Klemmbacken 74, 75 besitzen jeweils V-förmige Klemmflächen 76, 77, welche zusammen im Querschnitt parallelogrammartig angeordnet sind und ein in den Klemmbacken 74, 75 angeordnetes Kabel 2 über den Umfang klemmen, wobei die Größe des Parallelogramms abhängig ist von dem Abstand der Klemmbacken 74, 75 voneinander und damit von dem Durchmesser des Kabels 2. Die Klemmbacken 74, 75 sind in Richtung der Montageachse 34 versetzt zueinander angeordnet, so dass diese seitlich aneinander vorbeigeführt sind. Die Klemmbacken 74, 75 besitzen jeweils auf der Unterseite sich nach unten erstreckende Gleitsteine oder Stifte 78, 79, mit welchen diese eingreifen in die Langlöcher 72, 73 des Antriebskörpers 62. Auf diese Weise ist eine weitere Antriebsverbindungsstufe 80 gebildet, welche eine Bewegung des Antriebskörpers 62 in Richtung der Montageachse 34, die durch eine Betätigung des Betätigungsorgans 65 unter Nutzung der Antriebsverbindungsstufe 71 verursacht ist, umwandelt in eine Bewegung der Klemmbacken 74, 75 quer zur Montageachse 34, nämliche eine Bewegung der Klemmbacken 74, 75 aufeinander zu oder voneinander weg. Wie ebenfalls inFig. 15 zu erkennen ist, sind die Klemmbacken 74, 75 durch Federn 81, 82, welche am Gehäuse 13 abgestützt sind, aufeinander zu beaufschlagt. Letztendlich kann durch Betätigung des Betätigungsorgans 65 eine Öffnung der Klemmbacken 74, 75 derart erfolgen, dass von oben ein Kabel 2 in die Fixiereinheit 19 eingelegt wird. Die Beseitigung der Betätigungskraft 67 führt dazu, dass sich die Betriebsstellung der Fixiereinheit 19 vonFig. 15 inFig. 16 verändert, womit infolge der Federn 81, 82 und ggf. einer weiteren Feder 83, welche auf den Nutkörper 68 oder das Betätigungsorgan 65 wirkt, die Klemmbacken 74, 75 geschlossen werden, bis die Klemmflächen 76, 77 an die Mantelfläche des Kabels 2 zur Anlage kommen und dieses einklemmen und fixieren. Hierbei wird die axiale Position der mit dem Kabel 2 gebildeten Baugruppe 7 derart gewählt, dass sich die Dichtung 5 in einer vorbestimmten Axialstellung befindet, wobei diese insbesondere an einer Stirnseite des Führungsschlittens 93 anliegt. Dieser in das Solarverbinder-Montagewerkzeug 8 eingelegte Zustand der Baugruppe 7 ist beispielsweise inFig. 17 dargestellt. In dieser Stellung sind das Steckergehäuse 9 einerseits und die Baugruppe 7 andererseits koaxial zueinander angeordnet. - Die Prüfeinrichtung 18 ist zwischen der Bewegungseinheit 17 und der Fixiereinheit 19 angeordnet. Für das dargestellte Ausführungsbeispiel ist die Prüfeinrichtung 18 mit einem Prüfkörper 84 gebildet. Der Prüfkörper 84 besitzt einen Betätigungsknopf 85 und einen hiermit starr verbundenen Betätigungsstößel 86, welcher sich durch eine führende Bohrung 87 der Halbschale 14 des Gehäuses 13 hindurch erstreckt. Mittels einer Feder 88, welche sich für das dargestellte Ausführungsbeispiel außerhalb des Gehäuses 13 um den Betätigungsstößel 86 herum erstreckt und zwischen Gehäuse 13 und Betätigungsknopf gefangen und vorgespannt ist, wird der Prüfkörper 84 ohne manuelle Beaufschlagung des Betätigungsknopfes 85 nach außen beaufschlagt. Manuell kann der Prüfkörper 84 quer zur Montageachse 34 nach innen in das Gehäuse 13 gedrückt werden. Über entsprechende (nicht dargestellte) Führungselemente ist gewährleistet, dass der Prüfkörper 84 nicht um seine Betätigungsachse verdrehbar ist. Ohne manuelle Betätigung des Prüfkörpers 84 befindet sich die Prüfeinrichtung 18 in der in
Fig. 8 undFig. 17 dargestellten Ruhestellung. In dem in dem Gehäuse 13 liegenden Endbereich ist der Betätigungsstößel 86 in grober Näherung in Form eines liegenden U ausgebildet, sodass dieser eine randoffenen Ausnehmung 89 bildet, welche mit Stegen 90, 91 begrenzt ist. Der Stecker 6 ist insbesondere infolge des Crimpvorgangs im Axialbereich, wo dieser in Wechselwirkung tritt mit dem Prüfkörper 84, unrund ausgebildet, nämlich abgeflacht. Befindet sich der Stecker 6 in der richtigen Orientierung, d. h. ist dieser mit dem richtigen Drehwinkel um die Montageachse 34 in das Solarverbinder-Montagewerkzeug 8 eingelegt, kann der Stecker 6 infolge seiner Abflachung in die randoffene Ausnehmung 89 eintreten, womit eine Prüfstellung erreicht wird. Ist hingegen der Stecker 6 gegenüber dieser richtigen Orientierung um die Montageachse 34 verdreht, kann der Stecker 6 nicht in die randoffene Ausnehmung 89 eintreten, sondern kollidiert vielmehr mit den die Ausnehmung 89 begrenzenden Stegen 90, 91 des Betätigungsstößels 86. Für das dargestellte Ausführungsbeispiel sind die Stege 90, 91 multifunktional ausgebildet, indem diese nicht nur die Ausnehmung 89 begrenzen, sondern auch an den Endbereichen Absätze 92 ausbilden, über welche der Prüfkörper 84 in der Bohrung 87 verrastet werden kann und vermieden ist, dass der Prüfkörper 84 infolge der Vorspannung der Feder 88 vollständig aus dem Gehäuse 13 herausgedrückt wird. Möglich ist auch, dass für den Fall, dass die Fixiereinheit 19 manuell gelöst wird und die Prüfeinrichtung 18 betätigt wird, die Stege 90, 91 des Prüfkörpers 84 die Baugruppe 7 in die richtige Orientierung drehen. - Grundsätzlich möglich ist, dass die beschriebene Fixiereinheit 19 in Richtung der Montageachse 34 fixiert ist. Für das dargestellte Ausführungsbeispiel ist aber die Fixiereinheit mit einem Führungsschlitten 93 ausgebildet, an welchem in Richtung der Montageachse 34 verschieblich der Antriebskörper 62 gelagert ist sowie die anderen erläuterten Bauelemente der Fixiereinheit abgestützt sind. Der Führungsschlitten 93 wird entgegen der Montagerichtung 97 der Bewegungseinheit 17 durch das vorgespannte Federelement 63 gegen den Anschlag 64 gepresst. Wird auf den Führungsschlitten 93 eine Kraft in Montagerichtung 97 aufgebracht, die größer ist als die Vorspannkraft des Federelements 63, kann sich der Führungsschlitten 93 von dem Anschlag 64 lösen, so dass sich der Führungsschlitten 93 (und hiermit die weiteren Bauelemente der Fixiereinheit 19) in Montagerichtung 97 bewegen können. Um diesen Freiheitsgrad des Führungsschlittens 93 mit den zugeordneten Bauelementen der Fixiereinheit 19 zu gewährleisten, tritt eine Koppelstange 94 zwischen Betätigungsorgan 65 und Nutkörper 68 durch ein Langloch 95 der Halbschale 15 des Gehäuses 13 hindurch, wobei die Länge des Langloches 95 zumindest der zulässigen Bewegung des Führungsschlittens 93 entspricht.
- Die Funktion des Solarverbinder-Montagewerkzeugs 8 ist wie folgt:
- a) Zunächst wird das Betätigungsorgan 65 mit einer Betätigungskraft 67 manuell betätigt, um die Klemmbacken 74, 75 zu öffnen. In diesem geöffneten Zustand der Klemmbacken 74, 75 wird von oben in das Solarverbinder-Montagewerkzeug 8 die vormontierte Baugruppe 7 eingelegt. Hierbei erfolgt die axiale Ausrichtung der Baugruppe 7 derart, dass die Dichtung 5 mit der dem Stecker 6 abgewandten Stirnseite an dem Führungsschlitten 93 anliegt. Durch Beseitigung der auf das Betätigungsorgan 65 wirkenden Betätigungskraft 67 wird ein Einklemmen und fixieren des Kabels durch die Klemmbacken 74, 75 zwischen den Klemmflächen 76, 77 herbeigeführt.
- b) Je nachdem, welcher Typ eines Steckergehäuses 9 mit der Baugruppe 7 montiert werden soll, wird durch Verdrehen einer Flügelmutter 55, 56 der Haltekörper 49 in die richtige Betriebsstellung gebracht. Dann wird das Steckergehäuse 9 des der Betriebsstellung zugeordneten Typs von oben in das Solarverbinder-Montagewerkzeug 8 eingelegt, wobei die Stirnseite 98 des Steckergehäuses 9 zur Anlage an die wirksame Stirnseite 57, 58 des Haltekörpers 49 kommt und das Steckergehäuse 9 auf der Grundplatte 45 und der Konturierung 48 aufliegt.
- c) Jetzt oder unter Umständen auch vor der Durchführung des Verfahrensschritts b) wird durch Betätigung der Prüfeinrichtung 18 überprüft, ob für die eingelegte Baugruppe 7 der Stecker 6 richtig orientiert ist, also die randoffene Ausnehmung 89 über den Stecker 6 geschoben werden kann. Ist dies nicht der Fall, muss die Baugruppe 7 gemäß a) nochmals neu in das Solarverbinder-Montagewerkzeug 8 eingelegt werden.
- d) Zu diesem Zeitpunkt hat eine Stirnseite 100 des Steckergehäuses 9 von der Dichtung 5 noch einen Abstand, welcher einen Leerhub 101 erfordert, der ausgeführt werden muss, bevor die eigentliche Montage erfolgt. Müsste dieser Leerhub 101 bereits durch Betätigung des Antriebsmechanismus 16 mit der sukzessiven wiederholten Verschwenkung des Handhebels 12 überwunden werden, wären hierzu mehrere Betätigungsstufen des Handhebels 12 erforderlich, was einen unnötigen Aufwand darstellen würde. Um diesen Aufwand zu vermeiden, kann durch axiale Betätigung der Flügelmuttern 55, 56 entlang der Führungsschlitze 53, 54 in Montagerichtung 97 eine Verschiebung des Führungsschlittens 33 mit dem Haltekörper 46 und darauf gehaltenen Steckergehäuse 9 erfolgen, bis die Innenfläche 99 des Steckergehäuses 9 mit der Mantelfläche der Dichtung 5 in Wirkverbindung tritt. Zu diesem Zeitpunkt ist bereits der Stecker 6 mit dem der Dichtung 5 vorgelagerten Endbereich des Kabels 2 in das Innere des Steckergehäuses 9 eingetreten. Spürt der Benutzer, dass sich zu diesem Zeitpunkt ein erhöhter Widerstand gegen die Bewegung ergibt, erkennt der Benutzer, dass der Leerhub beendet ist.
- e) Nun beginnt der eigentliche Montage- oder Presshub, für welchen der Benutzer den Handhebel 12 in Richtung des festen Handhebels 11 verschwenkt, womit der Zahnstößel 29 um einen Teilmontagehub nach vorne bewegt wird, womit auch eine Bewegung der Verzahnung 35 und damit auch des Führungsschlittens 33 mit Haltekörper 49 und Steckergehäuse 9 einhergeht. Nach diesem Teilmontagehub und Schließung der Handhebel 11, 12 schwenkt die Feder 26 nach Beseitigung der Handkraft den Handhebel 12 wieder weg von dem festen Handhebel 11, was zur Folge hat, dass der Zahnstößel 29 zurückbewegt wird, womit das Zahnsegment 32 ratschenartig entlang der Verzahnung 35 bewegt wird. Die Position des Führungsschlittens 33 wird hierbei über das Zwangsgesperre 36 gesichert, so dass sich der Führungsschlitten 33 trotz der Beaufschlagung durch das Federelement 44 nicht zurückbewegen kann.
Nun kann der Benutzer durch erneutes und wiederholtes Verschwenken des Handhebels 12 in Richtung des Handhebels 11 weitere Teilmontagehübe erzeugen, womit letztendlich das Steckergehäuse 9 immer weiter auf die Baugruppe 7 aufgeschoben wird. Während des Montagehubs ist insbesondere die Dichtung 5 und/oder das Steckergehäuse 9 stirnseitig an der Fixiereinheit 19 abgestützt. Diese Abstützung nimmt die von der Rastnase 10 sowie dem Reibkontakt zwischen Dichtung 5 und Steckergehäuse 9 hervorgerufen Montagekraft auf. - f) Während des Aufschiebens des Steckergehäuses 9 auf die Baugruppe 7 ist die ausgeübte Montagekraft zunächst kleiner als die Vorspannung, mittels welcher das Federelement 63 den Führungsschlitten 93 gegen den Anschlag 64 presst. Hierbei hängt die Montagekraft maßgeblich von der Reibkraft zwischen Dichtung 5 und der Innenfläche 99 des Steckergehäuses 9 sowie der Wechselwirkung zwischen der Rastnase 10 und der Baugruppe 7 ab. Befindet sich hingegen das Steckergehäuse 9 in der fertig montierten Stellung gemäß
Fig. 1 , führt eine weitere Erhöhung der Montagekraft dazu, dass sich die eine Stirnseite der Dichtung 5 an einem Absatz 96 des Steckergehäuses 9 zusätzlich abstützt, womit es zu einem weiteren Anstieg der Montagekraft kommt. Überschreitet diese Montagekraft die Vorspannung, mittels welcher das Federelement 63 den Führungsschlitten 93 gegen den Anschlag 64 presst, beginnt der Führungsschlitten 93 sich zu bewegen, womit dem Benutzer sichtbar gemacht wird, dass die Montage und das Aufschieben beendet sind und eine definierte Montagekraft überschritten ist. Ein Vergleich derFig. 18 und19 zeigt die Bewegung des Führungsschlittens 93 mit Überschreiten der Vorspannkraft, vgl. den sich verringernden Spalt 103. - g) Nun kann der Betätigungsbolzen 41 in dem Führungsschlitz 42 manuell nach unten gedrückt werden, womit die Zahnsegmente 32, 40 außer Eingriff mit der Verzahnung 35 kommen und der Führungsschlitten 33 mit Haltekörper 49 über das Federelement 44 zurückgezogen werden, während das Steckergehäuse 9 in seiner montierten Position auf der Baugruppe 7 verbleibt. Das Federelement 44 beaufschlagt den Führungsschlitten 33 und den Haltekörper 49 mit einer Prüfkraft. Diese Prüfkraft wirkt zwischen dem in der Fixiereinheit 19 gehaltenen Kabel 2 und damit der Baugruppe 7 einerseits und dem in der Bewegungseinheit 17 gehaltenen Steckergehäuse 9, womit automatisch getestet werden kann, ob die Montage ordnungsgemäß erfolgt ist.
- h) Anschließend wird die Fixiereinheit 19 in ihre gelöste Stellung überführt, so dass die Klemmkräfte zwischen den Klemmbacken 74, 75 und dem Kabel 2 beseitigt werden. Wird nun an dem Kabel 2 in Montagerichtung 97 mit einer Prüfkraft gezogen, stützt sich eine Stirnseite der Dichtung 5 oder die Stirnseite 100 des Steckergehäuses 9 an dem Führungsschlitten 93 bzw. anderen Bauelementen der Fixiereinheit 19 ab. Überschreitet die Prüfkraft die Vorspannung, mit welcher das Federelement 63 den Führungsschlitten 93 gegen den Anschlag 64 vorspannt, kommt es zu einer für den Benutzer spürbaren und/oder sichtbaren Bewegung des Führungsschlittens 93. Somit kann eine Prüfung des fertig montierten Solarverbinders 1 mit einer durch die Vorspannung des Federelements 63 vorgegebenen definierten Prüfkraft noch in dem Solarverbinder-Montagewerkzeug 8 erfolgen.
- i) Für geöffnete Fixiereinheit 19 kann nun der Solarverbinder 1 aus dem Solarverbinder-Montagewerkzeug 8 entnommen werden.
- Wie in den dargestellten Ausführungsbeispielen kann die Montagebewegung darin bestehen, dass das von der Bewegungseinheit 17 gehaltene Steckergehäuse 9 auf die in der Fixiereinheit 19 gehaltene Baugruppe 7 aufgeschoben wird. Es ist im Rahmen der Erfindung aber durchaus auch möglich, dass eine Fixiereinheit das Steckergehäuse 9 hält, während eine Bewegungseinheit die daran gehaltene Baugruppe 7 in das Steckergehäuse 9 einschiebt. Entsprechend möglich ist auch die Nutzung eines Antriebsmechanismus, mittels welchem ein Auf- oder Einziehen erfolgt. Beispielsweise kann für eine ziehende Bewegung anstelle eines auf Druck beanspruchten Betätigungsstößels 86 ein betätigendes Zugelement mit zugeordnetem Antriebsmechanismus Einsatz finden. Vorzugsweise erfolgt aber kein Ziehen durch das Steckergehäuse 9 hindurch, wie dieses für den eingangs erläuterten Stand der Technik der Fall ist.
- Die Flügelmuttern 55, 56 stellen ein Ausführungsbeispiel für die Ausbildung eines Betätigungsorgans 102 dar, mittels dessen sowohl der Leerhub des Führungsschlittens 33 erzeugt werden kann als auch die Verdrehung des Haltekörpers 49.
- Durchaus möglich ist, dass ein Federelement mit mehreren Teilfederelementen ausgebildet ist. So wird beispielsweise die Vorspannkraft für den Führungsschlitten 93 der Fixiereinheit 19 für die dargestellten Ausführungsbeispiele mit mehreren parallel wirkenden Teilfederelementen erzeugt.
-
Fig. 21 bis 32 zeigen eine zweite Ausführungsform eines Solarverbinder-Montagewerkzeugs 208. In denFig. 21 bis 33 sind der ersten Ausführungsform gemäßFig. 2 bis 20 entsprechende Bauelemente mit Bezugsziffern versehen, die den Bezugsziffern inFig. 2 bis 20 , erhöht um die Zahl 200, entsprechen (bspw. ist das Solarverbinder-Montagewerkzeug 8 gemäßFig. 2 bis 20 inFig. 21 bis 33 mit dem Bezugszeichen 208 gekennzeichnet). -
Fig. 21 zeigt das Solarverbinder-Montagewerkzeug 208 in einer räumlichen Darstellung. Das Solarverbinder-Montagewerkzeug 208 besitzt ein "pistolenförmiges" Design, wobei der feste "Pistolengriff" einen gehäusefesten Handhebel 211 bildet, während der "Abzug" entsprechend der Länge des Handhebels 211 verlängert ist und einen verschwenkbaren Handhebel 212 bildet. Der "Lauf" gibt eine Montageachse 234 mit einer Montagerichtung 279 vor, entlang welcher während des Presshubs (und ggf. eines Leerhubs) in dem Solarverbinder-Montagewerkzeug 208 eine Bewegung hier ein Aufschieben des Steckergehäuses 9 auf die Baugruppe 7, erfolgt. Abweichend zu dem Ausführungsbeispiel gemäßFig. 2 bis 20 ist das Solarverbinder-Montagewerkzeug 208 mit einem Antriebsteil 400 und einem Montage-, Halte-und Führungsteil 401 gebildet. Nur das Antriebsteil 400 ist hier mit zwei Halbschalen 214, 215 aus Kunststoff gebildet, während das Montage-, Halte- und Führungsteil 401 mit einem massiven Tragkörper 402, bei welchem es sich vorzugsweise um ein Frästeil aus Metall, insbesondere Aluminium handelt, gebildet ist. Das Antriebsteil 400 und der Tragkörper 402 sind, wie beispielsweise inFig. 28 zu erkennen ist, über eine Nut-Feder oder Schwalbenschwanz-Verbindung 403 miteinander verbunden, wobei eine zusätzliche Sicherung durch Befestigungsschrauben 404 erfolgt. - Gegenüber dem Tragkörper 402 sind verschieblich entlang der Montageachse 234 eine erste Haltevorrichtung 405 sowie eine zweite Haltevorrichtung 406 geführt. In der ersten Haltevorrichtung 405 wird, ähnlich zu der Fixiereinheit 19, die Baugruppe 7 gehalten, was hier durch Einklemmen des Kabels 2 zwischen zwei Klemmbacken 274, 275 erfolgt. Hingegen dient die zweite Haltevorrichtung 406 der Aufnahme des Steckergehäuses 9. Hierzu besitzt die zweite Haltevorrichtung 406 eine nach oben offene Ausnehmung 407, welche randseitig durch eine grundsätzlich umlaufende Wandung 408 begrenzt ist. Auf der der ersten Haltevorrichtung 405 zugewandten Seite besitzt die Wandung 408 allerdings eine Durchbrechung 409, durch welche die Baugruppe in die zweite Haltevorrichtung 406 eintreten kann. Die Kontur der Ausnehmung 407 entspricht der Außenkontur des Steckergehäuses 9 derart, dass dieses derart von oben in die Ausnehmung 407 eingelegt werden kann, dass die Längsachse des Steckergehäuses koaxial zur Montageachse 234 angeordnet ist. Um auch in in die Ausnehmung 407 eingelegtem Zustand das Steckergehäuse 9 mit zwei Fingern greifen zu können, besitzt die Wandung 408 zwei seitliche, einander gegenüberliegende Durchbrechungen 410, 411.
- An dem Tragkörper 402 ist des Weiteren eine Prüf- und/oder Halteeinrichtung 218 gehalten.
- Die erste Haltevorrichtung 405 verfügt über eine Gehäuse- oder Tragplatte 412, welche in Richtung der Montageachse 234 zwischen einer ersten Betriebsstellung gemäß
Fig. 21 und einer zweiten Betriebsstellung gemäßFig. 24 gegenüber dem Tragkörper 402 geführt ist. In der ersten Betriebsstellung ist die Gehäuse- oder Tragplatte 412 über federbeaufschlagte Rastkugeln 413, die inFig. 24 zu erkennen sind und in Rastvertiefungen auf der Unterseite der Gehäuse- oder Tragplatte 412 eingreifen, rastiert, wobei diese erste Betriebsstellung bei Aufbringung hinreichend großer Kräfte durch den Benutzer unter Überwindung der Rastwirkung verlassen werden kann. Die zweite Betriebsstellung ist gesichert durch einen federbeaufschlagten Bolzen 414, welcher in der zweiten Betriebsstellung formschlüssig eingreift in eine vertikale Bohrung 415 der Gehäuse- oder Tragplatte 412. Die zweite Betriebsstellung kann lediglich verlassen werden, wenn entgegen der Beaufschlagung durch eine Feder 416 durch manuelle Betätigung eines Betätigungsknopfs 417 der Bolzen 414 außer Eingriff mit der Bohrung 415 gebracht wird (vgl.Fig. 32 ). - Die erste Haltevorrichtung 405 kann über ein Betätigungsorgan 265 von einer Haltestellung in eine gelöste Stellung und umgekehrt überführt werden. Das Betätigungsorgan 265 ist hier als Hebel 418 ausgebildet, von dem ein Endbereich eine sich in
Fig. 21 in vertikaler Richtung erstreckende Lagerwelle 419 trägt, welche eine vertikale Schwenkachse für den Hebel 418 vorgibt. Die Lagerwelle 419 ist durch ein Langloch 420 des Tragkörpers 402 hindurchgeführt, so dass der Hebel 418 mit der Lagerwelle 419 gemeinsam mit der Haltevorrichtung 405 zwischen den Betriebsstellungen derselben bewegbar ist. Auf der dem Hebel 418 abgewandten Seite des Tragkörpers 402 ist die Lagerwelle 419 verdrehbar in einer entsprechenden Bohrung 421 der Gehäuse- oder Tragplatte 412 aufgenommen, wobei die Lagerwelle 419 in einem aus der Gehäuse- oder Tragplatte 412 auskragenden Endbereich drehfest mit einer Nockenscheibe 422 verbunden ist. Der Hebel 418 und die Nockenscheibe 422 verschwenken somit gemeinsam in parallelen Horizontalebenen. An der Mantelfläche der Nockenscheibe 422 liegt infolge einer Beaufschlagung durch eine Feder ein Antriebsteil 423 an (vgl.Fig. 30 ). Das Antriebsteil 423 ist über an der Gehäuse- oder Tragplatte 412 gehaltene Führungsgehäuseteile 424, 425 derart geführt, dass dieses lediglich einen Freiheitsgrad in Richtung der Montageachse 234 besitzt. Je nach Verschwenkung des Hebels 418 und des Langlochs 420 wird angesichts des gebildeten Nockentriebs das Antriebsteil 423 in Richtung der Montageachse 234 bewegt. Das Antriebsteil 223 besitzt Keilflächen 426, 427 (Fig. 30 ). An den Keilflächen 426, 427 liegen Gegen-Keilflächen 428, 429 an, die jeweils von einer Klemmbacke 274, 275 ausgebildet sind. Die Klemmbacken 274, 275 sind für dieses Ausführungsbeispiel durch eine Druckfeder 430 auseinander beaufschlagt in eine Richtung quer zur Montageachse 234, womit letztendlich auch die Beaufschlagung des Antriebsteils 423 gegen die Mantelfläche der Nockenscheibe 422 erfolgt. Die Klemmbacken 274, 275 sind in Richtung der zweiten Haltevorrichtung 406 einseitig abgestützt an einem Abstützkörper 431, welcher starr an der Gehäuse- oder Tragplatte 412 gehalten ist. Der Kontakt zwischen Nockenscheibe 422 und Antriebsteil 423 bildet eine erste Antriebsverbindungsstufe 271, über welche eine Drehbewegung der Nockenscheibe 422 um eine Vertikalachse umgewandelt wird in eine translatorische Bewegung des Antriebsteils 43 entlang der Montageachse 234. Eine weitere Antriebsverbindungsstufe 280 ist gebildet mit dem Kontakt der Keilflächen 426, 427 des Antriebsteils 423 mit den Gegen-Keilflächen 428, 429 der Klemmbacken 274, 275. Ein Kraftfluss erfolgt somit von dem Benutzer über den Handhebel 418, die Lagerwelle 419 und die Nockenscheibe 422 mit einer ersten Übersetzung entsprechend der Ausgestaltung des Nockentriebs zu dem Antriebsteil 423 und dann mit einer weiteren Übersetzung entsprechend den Keilwinkeln zu den Klemmbacken 274, 275. - Die Prüf- und/oder Halteeinrichtung 218 verfügt über eine Führungsstange 432, die hier einen kreisförmigen Querschnitt mit einem gebördelten Endbereich 433 verfügt. Die Führungsstange 432 ist in einer Führungsbohrung 434 des Tragkörpers 402 quer zur Montageachse 234 verschieblich geführt, wobei ein Verdreh-Freiheitsgrad blockiert oder eingeschränkt ist. Über zwei federbeaufschlagte, gegenüber der Führungsstange 432 geführte Rastkugeln kann die Führungsstange 432 in zwei Positionen rastiert werden, in welchen die Rastkugeln eingreifen in eine entsprechende Rast-Vertiefung des Tragkörpers 402 (
Fig. 31 ). An der Führungsstange 432 ist über einen Verbindungsstift 435 ein L-förmiger Haltekörper 436 gehalten. Der nicht mit der Führungsstange 432 verbundene Schenkel des L-förmigen Haltekörpers 436 erstreckt sich hierbei in einer Horizontalebene in den Zwischenraum zwischen den Haltevorrichtungen 405, 406. Der Endbereich dieses Schenkels bildet eine Prüf- oder Haltebacke 437 aus. Weiterhin ist an dem Schenkel über eine Lagerwelle 438, welche parallel zur Montageachse 234 orientiert ist, eine weitere Prüf- oder Haltebacke 439 gelagert, welche infolge der Beaufschlagung durch eine hier nicht dargestellte Feder gegen die Prüf- oder Haltebacke 437 gepresst wird, während die Prüf- oder Haltebacke 439 über die manuelle Betätigung eines Endbereichs 440 von der Prüf- oder Haltebacke 437 weg bewegt werden kann entgegen der Beaufschlagung durch die Feder. In der nach außen verschobenen Stellung der Führungsstange 432 ist die Prüf- und/oder Halteeinrichtung 218 nicht wirksam, da die Prüf- oder Haltebacken seitlich beabstandet von der Montageachse 234 angeordnet sind. Wird hingegen durch Einschieben der Führungsstange 432 die Prüf- und/oder Halteeinrichtung zur Wirkung gebracht, kann zwischen den Prüf- oder Haltebacken 437, 439 ein Bauelement der Baugruppe 7, insbesondere eine Abflachung des Steckers 6 aufgenommen werden, womit einerseits eine Prüffunktion ausgeübt werden kann, wie diese fürFig. 2 bis 20 beschrieben worden ist. Alternativ oder zusätzlich möglich ist, dass auf diese Weise der Stecker 6 und damit die Baugruppe 7 in der richtigen Orientierung hinsichtlich eines Drehwinkels um die Montageachse 234 gehalten wird. - Wie insbesondere in
Fig. 31 und32 zu erkennen ist, ist die zweite Haltevorrichtung 406 in einer Führungsausnehmung 441 des Tragkörpers 402 in Richtung der Montageachse 234 verschieblich geführt. Zu Beginn des Presshubs befindet sich infolge der Beaufschlagung durch ein Federelement 442, welches hier mit zwei in einer Horizontalebene nebeneinanderliegenden Druckfedern 443, 444 gebildet ist, in der Ausgangsstellung. Aus dieser kann die Haltevorrichtung 406 inFig. 31 ,32 nach links und in Richtung der Haltevorrichtung 405 verlagert werden durch die Bewegung des Stößels 445 des Antriebsteils 423, wobei mit Bewegung der Haltevorrichtung 406 die Beaufschlagung des Federelements 442 größer wird. Die Bewegung der Haltevorrichtung 406 ist über ein Koppelelement 446, welches ein Langloch 447 des Tragkörpers 402 nach unten durchsetzt, gekoppelt mit einem Dämpfungszylinder 448, in welchem ein Dämpfungskolben 449, welcher an dem Tragkörper 402 oder dem Antriebsteil 400 abgestützt ist, geführt ist. Der Dämpfungszylinder 448 und der Dämpfungskolben 449 bilden ein Dämpfungselement 450, welches mit Bewegung der Haltevorrichtung 406 beaufschlagt wird und somit eine Dämpfung dieser Bewegung herbeiführt. Durchaus möglich ist, dass in das Dämpfungselement 450 auch eine Feder integriert ist, welche dann die Wirkung des Federelements 442 unterstützt. - In dem Antriebsteil 400 erfolgt die Betätigung des Stößels 445 über einen Antriebsmechanismus 216, der mit einem Kniehebelmechanismus 451 gebildet ist. Der Kniehebelmechanismus 451 verfügt über einen ersten Kniehebel 452 sowie einen zweiten Kniehebel 453, die über ein Kniegelenk 454 miteinander verbunden sind. Der Kniehebel 453 ist in dem dem Kniegelenk 454 abgewandten Endbereich verdrehbar an dem Gehäuse des Antriebsteils 400 gelagert. Der dem Kniegelenk 454 abgewandte Endbereich des Kniehebels 452 ist verdrehbar an dem Stößel 445 gelagert, so dass dieser Endbereich einerseits verschwenkbar ist und andererseits entlang der Montageachse 234 geführt mit dem Stößel 445 verschiebbar ist. Der Kniehebel 452 ist starr verbunden mit dem Handhebel 212, wobei das Kniegelenk 454 einerseits und das Gelenk zwischen Kniehebel 452 und Stößel 445 andererseits auf unterschiedlichen Seiten der Längsachse des Handhebels 212 angeordnet sind. Wird der Handhebel 212 in Richtung des starren Handhebels 211 verschwenkt, hat dies zur Folge, dass sich der Kniehebelmechanismus 451 in Richtung seiner Strecklage bewegt, womit der Stößel 445 aus dem Antriebsteil 400 herausgepresst wird (vgl. Übergang von
Fig. 32 zuFig. 33 ). Über eine Feder, die hier als Spiralfeder 455 ausgebildet ist, werden die Handhebel 211, 212 auseinander beaufschlagt. Für das dargestellte Ausführungsbeispiel ist auch der Kniehebel 453 über die Anlenkung an dem Gehäuse des Antriebsteils 400 hinaus verlängert, was hier aus Bauraumgründen mit einer Kröpfung erfolgt. In dem dem Kniegelenk 454 abgewandten Endbereich dieser Verlängerung 456 verfügt die Verlängerung 456 über eine konzentrisch zur Schwenkachse des Kniehebels 453 ausgebildete teilzylindrische Mantelfläche, welche mit einer Sperrverzahnung 457 ausgestattet ist. Mit einsetzendem Presshub tritt die Sperrverzahnung 457 in Wirkverbindung mit einem Sperrglied 458, welches vor dem vollständigen Durchlaufen des Presshubs eine Bewegung des Kniehebelmechanismus 451 von der Strecklage weg unterbindet. Das Sperrglied 458 wird hierbei durch eine Sperrfeder 459 in Sperrrichtung beaufschlagt. Am Ende des Presshubs hat das Sperrglied 458 die Sperrverzahnung 457 vollständig durchlaufen, womit das Sperrglied 458 derart umgelenkt werden kann, dass dieses außer Eingriffs kommt mit der Sperrverzahnung 457, womit infolge der Spiralfeder 455 ein Öffnen des Kniehebelmechanismus 451 ermöglicht ist, wobei sich das Sperrglied 458 ratschenartig ohne sperrende Wirkung entlang der Sperrverzahnung 457 bewegt. - Das Solarverbinder-Montagewerkzeug 208 kann wie folgt benutzt werden:
- a) Ausgehend von der Betriebsstellung gemäß
Fig. 21 wird zunächst ein Steckergehäuse 9 in die Ausnehmung 407 eingelegt. Hierbei ist die Innenkontur der Ausnehmung 407 derart gestaltet, dass das Steckergehäuse 9 nur bei richtiger Ausrichtung und koaxial zur Montageachse 234 in die Haltevorrichtung 406 eingelegt werden kann. Darüber hinaus kann durch Gestaltung der Innenkontur der Ausnehmung 407 gewährleistet werden, dass nur ein vorbestimmter Typ eines Steckergehäuses 9 mit der richtigen Außengeometrie in die Haltevorrichtung 406 eingelegt werden kann. - b) Für geöffneten Zustand der Klemmbacken 274, 275 der Haltevorrichtung 405 wird die Baugruppe 7 in die Haltevorrichtung 405 derart eingelegt, dass sich das Kabel 2 im Bereich der Klemmbacken 274, 275 befindet, während die Dichtung 5 und der Stecker 6 in dem Zwischenraum zwischen den Haltevorrichtungen 405, 406 angeordnet sind. Hierbei liegt die Dichtung 5 an der der Haltevorrichtung 406 zugewandten Stirnfläche des Abstützkörpers 431 an.
- c) Ausgehend von der Stellung des Hebels 418 gemäß
Fig. 21 wird dieser dann in die Betriebsstellung gemäßFig. 23 verschwenkt, womit die Nockenscheibe 422 verdreht wird, das Antriebsteil 423 entlang der Montageachse 234 nach hinten gedrückt wird und die Klemmbacken 274, 275 gegen die Mantelfläche des Kabels 2 nach innen gepresst werden, womit die Baugruppe 7 axial fixiert wird. - d) In dem Betriebszustand gemäß
Fig. 23 ist die von der Haltevorrichtung 405 gehaltene Baugruppe 7 noch beabstandet von dem in der Haltevorrichtung 406 gehaltenen Steckergehäuse 9 angeordnet. Durch Aufbringung manueller Kräfte auf die Gehäuse-oder Tragplatte 412 kann die Rastierung infolge der Rastkugeln 413 überwunden werden und eine Verschiebung der Haltevorrichtung 405 entlang des Langloches 420 nach hinten entlang der Montageachse 234 erfolgen, bis die inFig. 24 dargestellte Betriebsstellung erreicht ist. In dieser Betriebsstellung wird die Haltevorrichtung 405 durch den infolge der Beaufschlagung durch die Feder 416 in die Bohrung 415 eintretenden Bolzen 414 fixiert.
Die Bewegung von der Betriebsstellung gemäßFig. 23 in die Betriebsstellung gemäßFig. 24 wird auch als "Leerhub" bezeichnet, da hier noch keine Presskräfte zwischen Baugruppe 7 und Steckergehäuse 9 wirken. Mittels dieses Leerhubs erfolgt eine möglichst weite Annäherung der Baugruppe 7 an das Steckergehäuse 9, wobei auch möglich ist, dass die Baugruppe 7 zumindest teilweise, aber ohne Erzeugung relevanter Presskräfte, in das Steckergehäuse 9 eintritt. - e) Optional kann vor der Betätigung des Hebels 418 und damit dem Klemmen des Kabels 2 die Baugruppe 7, insbesondere im Bereich einer Abflachung des Steckers 6, von der Prüf- und/oder Halteeinrichtung 218 gegriffen werden, wobei die Abflachung des Steckers 6 zwischen den Prüf- oder Haltebacken 437, 439 in der richtigen Orientierung ausgerichtet und gehalten werden kann. Um die Halte- und/oder Prüfeinrichtung 218 zur Wirkung zu bringen, wird diese in der Führungsbohrung 437 so nach innen gedrückt, dass sich die Prüf- oder Haltebacken 437, 439 in den Bereich der Montageachse 234 befinden. Während der Betätigung des Hebels 418 gewährleistet dann die Prüf-und/oder Halteeinrichtung 218, dass die richtige Orientierung der Baugruppe 7 beibehalten wird. Ist die Fixierung der Baugruppe 7 in der Haltevorrichtung 405 erfolgt, können durch Betätigung des Endbereichs 440 entgegen der Beaufschlagung durch die Feder die Prüf- oder Haltebacken 437, 439 auseinander bewegt werden und die Prüf-und/oder Halteeinrichtung 218 kann entlang der Führungsbohrung 434 nach außen bewegt werden, womit die Wechselwirkung der Prüf- und/oder Halteeinrichtung 218 mit der Baugruppe 7 beseitigt wird.
- f) Durch Betätigung der Handhebel 211, 212 kann nun der eigentliche Presshub bewerkstelligt werden. Während durchaus möglich ist, dass das Verpressen auch in mehreren Arbeitsschritten mit mehrmaligem Durchlaufen des maximalen Schwenkwinkels der Handhebel 211, 212 erfolgt, erfolgt gemäß dem in den Fig. dargestellten Ausführungsbeispiel das Verpressen während des Presshubs in einem einzigen Arbeitsschritt mit einmaligem Durchlaufen des maximalen Schwenkwinkels der Handhebel 211, 212. Infolge des Einsatzes des mit der Sperrverzahnung 457 und dem Sperrglied 458 gebildeten Zwangsgesperres 460 ist es aber durchaus möglich, dass der Presshub unterbrochen wird, bevor der maximale Schwenkwinkel erreicht ist, wobei eine einmal erreichte Relativlage der Haltevorrichtungen 405, 406 durch das Zwangsgesperre 460 gesichert ist und hiervon ausgehend in einer nachfolgenden Pressstufe der Schwenkwinkel der Handhebel weiter vergrößert werden kann.
Ist der Presshub durch Herbeiführung des maximalen Schwenkwinkels der Handhebel 211, 212 durchlaufen, hat auch das Sperrglied 458 vollständig die Sperrverzahnung 457 passiert. Hiermit ist der Presshub beendet. Mit Beendigung des Presshubs ist das vollständige Aufschieben des Steckergehäuses 9 auf die Baugruppe 7 erfolgt und die Haltevorrichtungen 405, 406 sind maximal entlang der Montageachse 234 aneinander angenähert. - g) Da nach dem Durchlaufen des Sperrglieds 457 entlang der Sperrverzahnung 457 die sperrende Wirkung des Zwangsgesperres 460 aufgehoben ist, führen die Beseitigung der Handkräfte auf die Handhebel 211, 212 und die Spiralfeder 455 dazu, dass die Handhebel 211, 212 wieder automatisch auseinander bewegt werden, wobei sich der Kniewinkel des Kniehebelmechanismus 451 wieder vergrößert und der Stößel 445 aus der ausgefahrenen Betriebsstellung gemäß
Fig. 33 wieder zurückbewegt in die Betriebsstellung gemäßFig. 32 . Während das Kabel 2 weiterhin in der Haltevorrichtung 405 gehalten wird, wird ein Führungsschlitten 233 der Haltevorrichtung 406 durch das während des Presshubs vorgespannte Federelement 442 von der Haltevorrichtung 406 weg beaufschlagt, womit das in der Haltevorrichtung 406 gehaltene Steckergehäuse 9 mit einer durch das Federelement 442 vorgegebenen Prüfkraft gegenüber dem in der Haltevorrichtung 405 gehaltenen Kabel 2 beaufschlagt wird. Infolge der Elastizitäten des Kabels 2 und der Baugruppe 7 und eines etwaigen Setzverhaltens kommt es zu einer gewissen Prüfverschiebung der Haltevorrichtung 406 von der Haltevorrichtung 405 weg. Für einer ordnungsgemäße Montage folgt aber der Führungsschlitten 233 nicht vollständig der Rückbewegung des Stößels 445, bis der Führungsschlitten 233 wieder in die Ausgangslage mit Anlage an das Gehäuse des Antriebsteils 400 erfolgt, wie dies fürFig. 32 der Fall ist. Vielmehr verbleibt hier ein Abstand, welcher bspw. von den Toleranzen des Solarverbinders 1, der ordnungsgemäßen Montage, den Elastizitäten und einem Setzverhalten abhängig ist. Dieser Abstand kann erfasst werden durch eine Messeinrichtung 461, welche gemäßFig. 21 mit einem Pfeil 462 der Haltevorrichtung 406 oder des Führungsschlittens 233 ausgebildet ist sowie einem markierten Bereich 463 des Halte-, Montage- und Führungsteils 401 benachbart der Haltevorrichtung 406. Befindet sich nach der erläuterten Rückbewegung des Führungsschlittens 233 infolge der Wirkung des Federelements 442 der Pfeil 462 in dem Bereich 463, ist der Solarverbinder 1 ordnungsgemäß montiert - erfolgt die Rückbewegung derart, dass sich der Pfeil 462 aus dem Bereich 463 herausbewegt, kann auf einfache Weise optisch durch den Benutzer erkannt werden, dass der Solarverbinder 1 nicht ordnungsgemäß montiert ist (und/oder nicht ordnungsgemäße Bauelemente verwendet worden sind). Der Pfeil 462 einerseits und der Bereich 463 stellen Beispiele für Markierungen 464, 465 der Messeinrichtung 461 dar. Es versteht sich, dass abweichende Markierungen eingesetzt werden können, beispielsweise anstelle des Bereichs 463 eine Messskala, so dass je nach Position des Pfeils 462 die exakte Position abgelesen werden kann. - h) Nun kann durch Verschwenken des Hebels 418 die Klemmwirkung der Haltevorrichtung 405 beseitigt werden. Dies hat zur Folge, dass nun das Federelement 442 die Haltevorrichtung 406 vollständig in die Ausgangslage zurückbewegen kann, was mit einer Relativbewegung des Kabels 2 gegenüber der Haltevorrichtung 405 einhergeht. Hieran anschließend kann der Solarverbinder 1 aus den Haltevorrichtungen 405, 406 des Solarverbinder-Montagewerkzeugs 208 entnommen werden, woran sich ein neuer Montagevorgang für einen weiteren Solarverbinder 1 anschließen kann.
- i) Um die Haltevorrichtung 405 wieder in die Ausgangslage
Fig. 21 zu überführen, muss die Verriegelung über den Bolzen 414 beseitigt werden, indem manuell der Betätigungsknopf 417 betätigt wird und dann die Haltevorrichtung 405 entlang der Montageachse 234 von der Haltevorrichtung 406 manuell weggeschoben wird. - Für das Ausführungsbeispiel gemäß
Fig. 2 bis 20 ist die Haltevorrichtung 405, an welcher das Kabel 2 geklemmt wird, von der Fixiereinheit 19 gebildet, während die Haltevorrichtung 406 für die Baugruppe 7 in diesem Fall von der Bewegungseinheit 17 gebildet ist. Allerdings wird in dem Ausführungsbeispiel gemäßFig. 2 bis 20 der Leerhub durch Bewegung der Haltevorrichtung 406, also der Bewegungseinheit 17 herbeigeführt, während der Leerhub für das Ausführungsbeispiel gemäßFig. 21 bis 33 durch Bewegung der Haltevorrichtung 405 herbeigeführt wird. -
- 1
- Solarverbinder
- 2
- Kabel
- 3
- Abstand
- 4
- Stirnseite
- 5
- Dichtung
- 6
- Stecker
- 7
- Baugruppe
- 8
- Solarverbinder-Montagewerkzeug
- 9
- Steckergehäuse
- 10
- Rastnase
- 11
- Handhebel
- 12
- Handhebel
- 13
- Gehäuse
- 14
- Halbschale
- 15
- Halbschale
- 16
- Antriebsmechanismus
- 17
- Bewegungseinheit
- 18
- Prüfeinrichtung
- 19
- Fixiereinheit
- 20
- Antriebskurbel
- 21
- Verbindungsbolzen
- 22
- Schwenkbolzen
- 23
- Antriebskurbelplatte
- 24
- Antriebskurbelplatte
- 25
- Fortsatz
- 26
- Zugfeder
- 27
- Bolzen
- 28
- Schwenkbolzen
- 29
- Zahnstößel
- 30
- Bolzen
- 31
- Spiralschenkelfeder
- 32
- Zahnsegment
- 33
- Führungsschlitten
- 34
- Montageachse
- 35
- Verzahnung
- 36
- Zwangsgesperre
- 37
- Sperrklinke
- 38
- Schwenkbolzen
- 39
- Spiralschenkelfeder
- 40
- Zahnsegment
- 41
- Betätigungsbolzen
- 42
- Führungsschlitz
- 43
- Mitnehmerbolzen
- 44
- Federelement
- 45
- Grundplatte
- 46
- Seitenplatte
- 47
- Seitenplatte
- 48
- Konturierung
- 49
- Haltekörper
- 50
- Schwenkbolzen
- 51
- Durchgangsbohrung
- 52
- Durchgangsbohrung
- 53
- Führungsschlitz
- 54
- Führungsschlitz
- 55
- Flügelmutter
- 56
- Flügelmutter
- 57
- Stirnseite
- 58
- Stirnseite
- 59
- Abstand
- 60
- Abstand
- 61
- Fortsatz
- 62
- Antriebskörper
- 63
- Federelement
- 64
- Anschlag
- 65
- Betätigungsorgan
- 66
- Betätigungsrad
- 67
- Betätigungskraft
- 68
- Nutkörper
- 69
- Langloch oder Langnut
- 70
- Stift
- 71
- Antriebsverbindungsstufe
- 72
- Langloch
- 73
- Langloch
- 74
- Klemmbacke
- 75
- Klemmbacke
- 76
- Klemmfläche
- 77
- Klemmfläche
- 78
- Stift
- 79
- Stift
- 80
- Antriebsverbindungsstufe
- 81
- Feder
- 82
- Feder
- 83
- Feder
- 84
- Prüfkörper
- 85
- Betätigungsknopf
- 86
- Betätigungsstößel
- 87
- Bohrung
- 88
- Feder
- 89
- Ausnehmung
- 90
- Steg
- 91
- Steg
- 92
- Absatz
- 93
- Führungsschlitten
- 94
- Koppelstange
- 95
- Langloch
- 96
- Absatz
- 97
- Montagerichtung
- 98
- Stirnseite
- 99
- Innenfläche
- 100
- Stirnseite
- 101
- Leerhub
- 102
- Betätigungsorgan
- 103
- Spalt
- 208
- Solarverbinder-Montagewerkzeug
- 211
- Handhebel
- 212
- Handhebel
- 213
- Gehäuse
- 214
- Halbschale
- 215
- Halbschale
- 216
- Antriebsmechanismus
- 218
- Prüf- und/oder Halteeinrichtung
- 233
- Führungsschlitten
- 234
- Montageachse
- 265
- Betätigungsorgan
- 271
- Antriebsverbindungsstufe
- 274
- Klemmbacke
- 275
- Klemmbacke
- 280
- Antriebsverbindungsstufe
- 297
- Montagerichtung
- 400
- Antriebsteil
- 401
- Montage-, Halte- und Führungsteil
- 402
- Tragkörper
- 403
- Schwalbenschwanz-Verbindung
- 404
- Befestigungsschraube
- 405
- Haltevorrichtung
- 406
- Haltevorrichtung
- 407
- Ausnehmung
- 408
- Wandung
- 409
- Durchbrechung
- 410
- Durchbrechung
- 411
- Durchbrechung
- 412
- Gehäuse- oder Tragplatte
- 413
- Rastkugel
- 414
- Bolzen
- 415
- Bohrung
- 416
- Feder
- 417
- Betätigungsknopf
- 418
- Hebel
- 419
- Lagerwelle
- 420
- Langloch
- 421
- Bohrung
- 422
- Nockenscheibe
- 423
- Antriebsteil
- 424
- Führungsgehäuseteil
- 425
- Führungsgehäuseteil
- 426
- Keilfläche
- 427
- Keilfläche
- 428
- Gegen-Keilfläche
- 429
- Gegen-Keilfläche
- 430
- Druckfeder
- 431
- Abstützkörper
- 432
- Führungsstange
- 433
- Endbereich
- 434
- Führungsbohrung
- 435
- Verbindungsstift
- 436
- Haltekörper
- 437
- Prüf- oder Haltebacke
- 438
- Lagerwelle
- 439
- Prüf- oder Haltebacke
- 440
- Endbereich
- 441
- Führungsausnehmung
- 442
- Federelement
- 443
- Druckfeder
- 444
- Druckfeder
- 445
- Stößel
- 446
- Koppelelement
- 447
- Langloch
- 448
- Dämpfungszylinder
- 449
- Dämpfungskolben
- 450
- Dämpfungselement
- 451
- Kniehebelmechanismus
- 452
- Kniehebel
- 453
- Kniehebel
- 454
- Kniegelenk
- 455
- Spiralfeder
- 456
- Verlängerung
- 457
- Sperrverzahnung
- 458
- Sperrglied
- 459
- Sperrfeder
- 460
- Zwangsgesperre
- 461
- Messeinrichtung
- 462
- Pfeil
- 463
- Bereich
- 464
- Markierung
- 465
- Markierung
Claims (12)
- Solarverbinder-Montagewerkzeug (8; 208) mita) einer ersten Haltevorrichtung (405) für eine Baugruppe (7),b) einer zweiten Haltevorrichtung (406) für ein Steckergehäuse (9),c) einem Antriebsmechanismus (16; 216),ca) der mit einer der Haltevorrichtungen (405; 406) gekoppelt ist,cb) über welchen für ein Aufpressen des Steckergehäuses (9) auf die Baugruppe (7) die Haltevorrichtungen (405; 406) unter Beaufschlagung eines Federelements (44; 442) relativ zueinander aufeinander zu bewegbar sind,dadurch gekennzeichnet, dassd) mit Beendigung des Presshubs und Beseitigung der Presskraft des Antriebsmechanismus (216) das während des Presshubs beaufschlagte Federelement (44; 442) die Haltevorrichtungen (405; 406) auseinanderdrückt, womit eine zwischen Steckergehäuse (9) und Baugruppe (7) wirkende Prüfkraft erzeugbar ist.
- Solarverbinder-Montagewerkzeug (8; 208) nach Anspruch 1, dadurch gekennzeichnet, dass die Beendigung des Presshubs und die Beseitigung der Presskraft automatisch bewegungsgesteuert oder kraftgesteuert erfolgt.
- Solarverbinder-Montagewerkzeug (208) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass ein Dämpfungselement (450), insbesondere ein Öl- oder Gasdruckdämpfer, vorhanden ist, wobei das Dämpfungselement (450) die zwischen Steckergehäuse (9) und Baugruppe (7) wirkende Prüfkraft beeinflusst.
- Solarverbinder-Montagewerkzeug (208) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass eine Messeinrichtung (461) vorhanden ist, mittels welcher die relative Verschiebung der beiden Haltevorrichtungen (405; 406) infolge der Beaufschlagung durch das Federelement (442) bei Beaufschlagung des Steckergehäuses (9) und der Baugruppe (7) mit der Prüfkraft erfasst werden kann.
- Solarverbinder-Montagewerkzeug (208) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Messeinrichtung (461) mit einer Markierung (464) einer infolge des Federelements (442) gegenüber einem Gehäuse bewegten Haltevorrichtung (406) sowie einer Markierung (465) des Gehäuses gebildet ist.
- Solarverbinder-Montagewerkzeug (8; 208) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass eine Haltevorrichtung (406) während des Presshubs von dem Antriebsmechanismus (216) bewegbar ist und diese oder die andere Haltevorrichtung (405; 406) während eines Leerhubs unabhängig von dem Antriebsmechanismus (216) bewegbar ist.
- Solarverbinder-Montagewerkzeug (208) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der Antriebsmechanismus (216) mit einem Kniehebelmechanismus (451) gebildet ist, welcher über Handhebel (211, 212) betätigbar ist.
- Solarverbinder-Montagewerkzeug (208) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass ein Federelement (Spiralfeder 455) vorhanden ist, über welches der Antriebsmechanismus (216) nach dem Durchlaufen des Presshubs und Beseitigung der auf Handhebel (11, 12; 211, 212) aufgebrachten Handkräfte in seine Ausgangsstellung rückführbar ist.
- Solarverbinder-Montagewerkzeug (208) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass eine Prüf- und/oder Halteeinrichtung (18; 218) vorhanden ist, mittels welchera) geprüft werden kann, ob eine Baugruppe (7) mit der richtigen Orientierung in das Solarverbinder-Montagewerkzeug (8; 218) eingelegt ist, und/oderb) die Baugruppe (7) in dem Solarverbinder-Montagewerkzeug (8; 218) gehalten werden kann.
- Solarverbinder-Montagewerkzeug (8) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Haltevorrichtung (406) für das Steckergehäuse (9) einen Haltekörper (49) besitzt, dera) eine erste Betriebsstellung besitzt, in der der Haltekörper (49) ein Steckergehäuse (9) mit einer ersten Geometrie halten kann, undb) eine zweite Betriebsstellung besitzt, in der der Haltekörper (49) ein Steckergehäuse (9) mit einer zweiten Geometrie halten kann.
- Solarverbinder-Montagewerkzeug (8, 208) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der Antriebsmechanismus (216) ein Zwangsgesperre (36; 460) aufweist, wobei das Federelement (44; 442) die Prüfkraft erst auf die Haltevorrichtungen (405; 406) aufbringt, wenn die Sperrwirkung des Zwangsgesperres mit Durchlaufen des Presshubs aufgehoben ist.
- Solarverbinder-Montagewerkzeug (208) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass eine Haltevorrichtung (405) über ein Betätigungsorgan (265) von einer Haltestellung in eine gelöste Stellung und/oder von einer gelösten Stellung in eine Haltestellung überführbar ist, wobei die Haltevorrichtung (405) mit federbeaufschlagten Klemmbacken (274, 275) gebildet ist.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP20130170519 EP2672585B1 (de) | 2012-06-05 | 2013-06-04 | Solarverbinder-Montagewerkzeug |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP12170886.1A EP2672584A1 (de) | 2012-06-05 | 2012-06-05 | Solarverbinder-Montagewerkzeug |
| EP20130170519 EP2672585B1 (de) | 2012-06-05 | 2013-06-04 | Solarverbinder-Montagewerkzeug |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2672585A2 EP2672585A2 (de) | 2013-12-11 |
| EP2672585A3 EP2672585A3 (de) | 2014-08-20 |
| EP2672585B1 true EP2672585B1 (de) | 2015-04-08 |
Family
ID=48520850
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12170886.1A Withdrawn EP2672584A1 (de) | 2012-06-05 | 2012-06-05 | Solarverbinder-Montagewerkzeug |
| EP20130170519 Not-in-force EP2672585B1 (de) | 2012-06-05 | 2013-06-04 | Solarverbinder-Montagewerkzeug |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12170886.1A Withdrawn EP2672584A1 (de) | 2012-06-05 | 2012-06-05 | Solarverbinder-Montagewerkzeug |
Country Status (1)
| Country | Link |
|---|---|
| EP (2) | EP2672584A1 (de) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2995424B1 (de) | 2014-09-11 | 2018-12-12 | Wezag GmbH Werkzeugfabrik | Handzange |
| DE202014011110U1 (de) | 2014-09-11 | 2017-11-29 | Wezag Gmbh Werkzeugfabrik | Handzange |
| CN109390836B (zh) * | 2018-11-23 | 2024-02-13 | 上海雷迪埃电子有限公司 | 弯式连接器的装配工装 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2651384B1 (fr) | 1989-08-31 | 1991-11-29 | Aerospatiale | Dispositif pour sertir des elements de connexion sur des conducteurs electriques et systeme de sertissage automatique comportant un tel dispositif. |
| DE4010349A1 (de) * | 1990-03-28 | 1991-10-02 | Siemens Ag | Steckmodul fuer eine kabelkonfektioniereinrichtung |
| FR2731301B1 (fr) * | 1995-03-03 | 1998-09-11 | Amp France | Machine pour inserer des bornes de conducteurs dans des boitiers de connecteurs |
| DE19832210C1 (de) * | 1998-07-17 | 2000-08-31 | Rolf Hugo | Montage- und Prüfeinrichtung für eine verrastbare Kabel-Stecker-Verbindung |
| JP2004214122A (ja) * | 2003-01-08 | 2004-07-29 | Yazaki Corp | 端子係止確認装置及び端子係止確認方法 |
| US7444744B2 (en) | 2005-04-14 | 2008-11-04 | Panduit Corp. | Tool for connectors assembly |
| US8001679B2 (en) | 2009-01-21 | 2011-08-23 | Pct International, Inc. | Compression tool with adjustable pushing length |
| EP2224557A1 (de) * | 2009-02-25 | 2010-09-01 | Research In Motion Limited | Kabelanschluss-Greifvorrichtung |
-
2012
- 2012-06-05 EP EP12170886.1A patent/EP2672584A1/de not_active Withdrawn
-
2013
- 2013-06-04 EP EP20130170519 patent/EP2672585B1/de not_active Not-in-force
Also Published As
| Publication number | Publication date |
|---|---|
| EP2672585A3 (de) | 2014-08-20 |
| EP2672585A2 (de) | 2013-12-11 |
| EP2672584A1 (de) | 2013-12-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3012923B1 (de) | Presszange | |
| EP2082837B1 (de) | Presszange | |
| EP2562891B1 (de) | Presszange | |
| EP3614507B1 (de) | Press- oder crimpzange | |
| DE102010021704A1 (de) | Schlosskappe für ein Gurtschloss und Verfahren zu ihrer Montage | |
| AT514078B1 (de) | Biegewerkzeug | |
| EP2596878A2 (de) | Mehrfachwerkzeug für eine Stanzvorrichtung | |
| EP2078591B1 (de) | Presswerkzeug | |
| EP2115829B1 (de) | Positionierungseinrichtung für crimpwerkzeuge | |
| EP3834989B1 (de) | Handzangenwerkzeug und verfahren zur montage desselben | |
| EP2672585B1 (de) | Solarverbinder-Montagewerkzeug | |
| DE102007005176B4 (de) | Positionierungseinrichtung für Crimpwerkzeuge | |
| EP3553899A1 (de) | Crimpwerkzeug | |
| EP2512704B1 (de) | Vorrichtung zum setzen von befestigungselementen | |
| EP2734316A1 (de) | Handgeführtes presswerkzeug | |
| EP2672582A1 (de) | Solarverbinder-Montagewerkzeug | |
| EP2672583A1 (de) | Solarverbinder-Montagewerkzeug | |
| EP2512705B1 (de) | Vorrichtung zum setzen von befestigungselementen | |
| DE102004018429B4 (de) | Vorrichtung zum Aufbringen einer axialen Preßkraft | |
| EP2385891B1 (de) | Zange zur herstellung einer schiebehülsenverbindung | |
| DE102018209498A1 (de) | Werkzeugsysteme zur Ausbildung abgedichteter Verbindungen | |
| EP3718695B1 (de) | Presswerkzeug für einen fitting mit presslasche | |
| DE202019001563U1 (de) | Presswerkzeug für einen Fitting mit Presslasche | |
| DE202008005082U1 (de) | Presswerkzeug |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: H01R 43/22 20060101AFI20140711BHEP |
|
| 17P | Request for examination filed |
Effective date: 20140918 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20141223 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 721186 Country of ref document: AT Kind code of ref document: T Effective date: 20150515 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502013000535 Country of ref document: DE Effective date: 20150521 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20150408 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150810 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150709 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150808 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502013000535 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: RO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150408 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150604 |
|
| 26N | No opposition filed |
Effective date: 20160111 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150604 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20160420 Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20160621 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160630 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20130604 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502013000535 Country of ref document: DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20170604 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20180228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170604 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170630 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150408 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 721186 Country of ref document: AT Kind code of ref document: T Effective date: 20180604 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180604 |