EP2572829B1 - Device and method for processing the surface of workpieces - Google Patents
Device and method for processing the surface of workpieces Download PDFInfo
- Publication number
- EP2572829B1 EP2572829B1 EP12005929.0A EP12005929A EP2572829B1 EP 2572829 B1 EP2572829 B1 EP 2572829B1 EP 12005929 A EP12005929 A EP 12005929A EP 2572829 B1 EP2572829 B1 EP 2572829B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- workpiece
- grinding
- sensor
- container
- bed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B31/00—Machines or devices designed for polishing or abrading surfaces on work by means of tumbling apparatus or other apparatus in which the work and/or the abrasive material is loose; Accessories therefor
- B24B31/003—Machines or devices designed for polishing or abrading surfaces on work by means of tumbling apparatus or other apparatus in which the work and/or the abrasive material is loose; Accessories therefor whereby the workpieces are mounted on a holder and are immersed in the abrasive material
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B31/00—Machines or devices designed for polishing or abrading surfaces on work by means of tumbling apparatus or other apparatus in which the work and/or the abrasive material is loose; Accessories therefor
- B24B31/02—Machines or devices designed for polishing or abrading surfaces on work by means of tumbling apparatus or other apparatus in which the work and/or the abrasive material is loose; Accessories therefor involving rotary barrels
- B24B31/0224—Machines or devices designed for polishing or abrading surfaces on work by means of tumbling apparatus or other apparatus in which the work and/or the abrasive material is loose; Accessories therefor involving rotary barrels the workpieces being fitted on a support
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B49/00—Measuring or gauging equipment for controlling the feed movement of the grinding tool or work; Arrangements of indicating or measuring equipment, e.g. for indicating the start of the grinding operation
Definitions
- the invention relates to a method for the surface treatment of workpieces by the workpiece is immersed in a container located in a bed of a grinding and / or polishing granules and moved in the bed of the grinding and / or polishing granules relative thereto.
- the invention further relates to a device suitable for carrying out such a method for the surface treatment of workpieces by immersing the workpiece in a bed of a grinding and / or polishing granules with relative movement of the same with respect to the workpiece, with a container for receiving the Grinding and / or polishing granules and with one or more workpiece holder (s) to which / which the workpieces to be machined are releasably fixable, wherein the / the workpiece holder is movable relative to the container / are (see, eg FR 2511628 ).
- Drag finishing machines represent a special form of vibratory finishing machines, wherein the workpieces to be machined are, for example, individually detachably fixed to one or more workpiece holders on the occasion of their surface treatment.
- Towing machines often include a generally rotating support member substantially in the form of, for example, a motor driven by a suitable gear rotationally driven plate on the periphery of a plurality of receptacles are arranged to clamp the workpiece holder. If this supporting part - the so-called plate or rotor - of the drag finishing machine is rotated, then the workpiece holders defined here describe a trajectory.
- the workpieces releasably secured to the workpiece holders are immersed in the working container, which is filled with the bed of the particulate abrasive or polishing granules, optionally with the addition of liquid media, such as water, surfactants, etc. Due to the relative movement of the workpieces with respect to the processing medium whose surface processing takes place in the form of a vibratory finishing.
- Such drag finishing machines are for example from the DE 102 04 267 C1 and DE 200 05 361 U1 known.
- the container receiving the processing medium can be moved relative to the likewise moving workpieces which are rotated, for example at least about their own axis, or else at rest, such as, for example, about its own axis and / or along one of its axes Trajectory, eg in the form of a circular path. If only the container is moved and the workpieces themselves do not perform a translatory movement, then this is also referred to as "dip grinding” or “dip polishing” as a special form of drag finish.
- the grinding or polishing granules can in principle, depending on the treated workpieces of different nature and eg natural origin (eg organic material such as walnut or coconut shells, wood, cherry stone, etc.), mineral origin (eg of silicates, oxides, etc.) and / or of synthetic origin (eg of plastics).
- natural origin eg organic material such as walnut or coconut shells, wood, cherry stone, etc.
- mineral origin eg of silicates, oxides, etc.
- synthetic origin eg of plastics.
- additives such as surfactants.
- the relative speed between the workpiece and the granulate particles plays the processing time, which also As a rule, can be preset, as well as the immersion depth of the workpiece in the bed of abrasive and / or polishing granules a role, said due to the increasing pressure of the granules on the workpiece with increasing immersion depth of the same in the granular fill the abrasive effect of the granules on the workpiece increasing immersion depth increases.
- the bed of granules has an uneven surface contour in the container due to centrifugal force or inertia. Consequently, the aforementioned process parameters interact with each other in a significant way.
- the DE 10 2009 021 824 A1 describes a generic method for surface treatment of metallic components in a granular abrasive medium, wherein the effect of the grinding medium of the immersion depth of the component in the abrasive medium and the pressure thereby changed can be changed.
- a controlled by the grinding parameters abrasive, grinding speed, grinding time, workpiece movement, immersion depth, wet or dry grinding and reproducible edge contour of the machined components but remains open as to take place.
- the invention is therefore the object of a method and an apparatus for surface treatment of workpieces of the type mentioned in a simple and cost-effective way to the effect to provide a more uniform and reproducible especially surface treatment of the workpieces to be machined, in particular, such workpieces a Surface treatment should be made possible, which must meet very small tolerances and / or make very high demands on a well-defined surface finish.
- this object is achieved in a method for surface treatment of workpieces of the type mentioned in that the immersion depth of the workpiece in the bed of abrasive and / or polishing granules on the occasion of the surface treatment by subtracting the sensory determined distance between one above the container arranged sensor and the level of the grinding and / or polishing granules in the container is determined by a known distance between the sensor and the workpiece.
- the invention provides for solving this problem in a suitable in particular for carrying out such a method device for surface treatment of workpieces of the type mentioned above, that the device further comprises at least one arranged above the container sensor, which for determining the distance between the Sensor and the level of the grinding and / or polishing granules is designed to determine by subtracting this distance from a known distance between the sensor and the workpiece - or between the sensor and the workpiece holder supporting the workpiece - the immersion depth thereof in the container located in the bed of abrasive and / or polishing granules ,
- the embodiment according to the invention therefore provides for determining the immersion depth thereof, which is decisive for the degree of abrasive grinding and / or polishing action of the granulate particles on the workpiece, in the granulate bed with the aid of a sensor so that on the one hand it is possible to ensure reproducible process conditions and / or on the other hand adapt other process parameters to this.
- the determination of the actual depth of immersion of the workpiece into the granulate bed provided with the aid of the sensor can be effected either at the beginning of the surface machining operation, for example before the workpiece holder of a drag finishing machine is set in motion, or in particular also during the surface processing, eg also more or less continuously or in regular time intervals in real time, done so that the accumulated by any surface contours of the granules in the container, which accumulates for example by damming on the immersed in Schüttun, moving relative to the bed workpiece (holder) above the workpiece, dependent immersion depth with greater accuracy can be detected.
- the immersion depth of the workpiece in the bed of abrasive and / or polishing granules is inventively determined by the distance between the arranged above the container sensor and the level level or the surface of the grinding and / or polishing granules determined in the container above the workpiece and subtracted from a known distance between the sensor and the workpiece.
- sensor disposed above the vessel in the context of the present disclosure is not necessarily meant a sensor located above the upper vessel rim, but it will be apparent to those skilled in the art that the sensor is above that in the vessel Of course, it must be arranged at least during the surface treatment depending on the filling level of the container, of course, also in the interior of the container above the bottom thereof and / or may protrude from above into the container located grinding and / or polishing granules.
- the method according to the invention lends itself, albeit not exclusively, to a variant of the method in which at least the container is rotated about a substantially vertical axis during surface machining of the workpiece, the workpiece merely immersed in the container ("dip finishing") or in turn is additionally moved translationally and / or rotationally.
- the method makes it possible to determine the depth of immersion of the workpiece dependent on the rotational speed of the container, which leads to a speed-dependent accumulation of the granulate particles in the edge region of the container as a result of centrifugal forces in the rotationally moving granular bed.
- a corresponding device is therefore characterized by the fact that the container is associated with a rotary drive to enable it to rotate.
- the workpiece holder is arranged on a relative to the container for receiving the grinding and / or polishing granules movable, in particular rotatable, part, as it is known as such in generic towing machines.
- the distance between the sensor and the filling level of the grinding and / or polishing granules is determined by means of non-contact displacement and / or proximity sensors or by means of mechanical tactile sensors, which e.g. can be arranged above the workpiece.
- a device preferably has a sensor which is provided by a non-contact displacement and / or proximity sensor, in particular from the group of inductive, capacitive, magnetic, optical and electromagnetic displacement and / or proximity sensors, or by a mechanical sensor, in particular a tactile sensor is formed.
- a non-contact displacement and / or proximity sensor in particular from the group of inductive, capacitive, magnetic, optical and electromagnetic displacement and / or proximity sensors, or by a mechanical sensor, in particular a tactile sensor is formed.
- sensors in the form of light barriers, ultrasound, laser, infrared sensors, pendulum buttons, etc. may preferably be used here.
- ultrasonic and laser distance sensors or so-called laser scanner have proven, in particular 2D laser scanner can be used, which are able to detect the contour of objects (here: the grinding and / or polishing granules) on a plane digitally.
- 2D laser scanners are laser-optical distance sensors, which are of the laser triangulation method Make use, ie a laser light source of the sensor projects a laser spot on the granule surface, after which the light reflected there, depending on the distance at a certain angle incident on a receiver of the sensor.
- the senor can be expediently arranged above or at the level of the workpiece holder in order to determine the distance between the sensor and the fill level of the grinding and / or polishing granules in the container above the workpiece and a known distance between the sensor and to be able to subtract the workpiece or between the sensor and the workpiece holder carrying the workpiece.
- the method according to the invention offers, in particular, the possibility of self-regulation in that the actual depth of immersion of the workpiece determined with the aid of the sensor is always compared with a desired immersion depth and the latter is readjusted, and / or others determined by means of the sensor Immersion depth dependent process parameters are adapted to the determined actual immersion depth.
- the determined actual depth of immersion of the workpiece is used in the bed of abrasive and / or polishing granules to raise or lower the workpiece according to the desired immersion depth in the bed of grinding and / or polishing granules.
- the determined actual immersion depth is used to at least one parameter from the group relative speed of the workpiece with respect to the bed of abrasive and / or polishing granules (ie with increasing immersion depth of the workpiece in the granular bed, the relative speed can be reduced, while the latter can be increased with decreasing depth of immersion of the workpiece in the granule) and processing time (ie, with increasing depth of immersion of the workpiece in the granules, the processing time can be reduced, while the latter with decreasing immersion depth of the workpiece in the granule can be extended) in response to change.
- the group relative speed of the workpiece with respect to the bed of abrasive and / or polishing granules ie with increasing immersion depth of the workpiece in the granular bed, the relative speed can be reduced, while the latter can be increased with decreasing depth of immersion of the workpiece in the granule
- processing time ie, with increasing depth of immersion of the workpiece in the granules, the processing time can
- a preferred embodiment therefore provides that the sensor is operatively connected to a control device, which is further operatively connected to a lifting device associated with the workpiece holder to the workpiece depending on the determined using the sensor actual immersion depth in the bed of grinding and / or polishing granules according to the desired immersion depth in the bed of grinding and / or polishing granules to raise or lower.
- the bed of grinding and / or polishing granules in many cases it is desirable for the bed of grinding and / or polishing granules to be admixed with a liquid processing medium, such as water, which may optionally be admixed with additives, such as surfactants, etc.
- a liquid processing medium is added, wherein the amount of added processing medium is controlled. If a circulation of the liquid processing medium, optionally with the interposition of a cleaning stage, is desired and the container further comprises a drain for the liquid processing medium for this purpose, can of course also be controlled from the container discharged amount of liquid processing medium.
- the container of a corresponding device preferably has an inlet provided with a controllable metering pump in order to add a controllable amount of a liquid processing medium to the grinding and / or polishing granules contained in the container.
- a controllable metering pump in order to add a controllable amount of a liquid processing medium to the grinding and / or polishing granules contained in the container.
- the same can apply to an optionally provided outlet from the container.
- the dosing pumps can likewise be connected to a, in particular central, control device.
- FIG. 1 an embodiment of a device according to the invention in the form of a drag finishing machine 1a is shown.
- the towing machine 1 a is equipped with a workpiece holder 2, which by means of a clamping connection 3 on a moving - here: rotatable - supporting part 4 of the drag finishing machine 1 a, the so-called plate or Rotor, releasably fixed.
- the workpiece holder 2 is eccentrically clamped with respect to the axis of rotation 4a of the support member 4 at the latter, so that it describes a trajectory during rotation of the support member 4.
- the workpiece holder 2 can in turn be fixed about an axis 2a, such as about its longitudinal axis, rotatable on the support member 4, which can be done for example by means disposed in the support member 4 planetary gear, which upon rotation of the support member 4 about its axis of rotation 4a a rotation of the workpiece holder 2 is induced about its axis of rotation 2a.
- axis 2a such as about its longitudinal axis
- planetary gear which upon rotation of the support member 4 about its axis of rotation 4a a rotation of the workpiece holder 2 is induced about its axis of rotation 2a.
- further workpiece holder (not shown), which can also be tensioned on the underside of the support member 4 in eccentric position to the axis of rotation 4a.
- the workpiece holder 2 can be designed, for example, to receive a plurality of workpieces (not shown) that are essentially vertically tensionable and, for this purpose, face away from the clamping connection 3 with the carrying part 4 at its clamping part 3 Fig. 1 lower side a plurality - in the present case three - workpiece carrier 6 for releasably clamping each of a workpiece or a workpiece holder for clamping each one or more workpieces (each not shown).
- the workpiece carriers 6 are distributed around the circumference of the workpiece holder 2, ie arranged eccentrically with respect to its axis of rotation 2 a.
- the workpiece carrier 6 In order to apply to the workpiece carrier 6 in addition to the translational movement as a result of rotation of the support member 4 and the workpiece holder 2 with a rotational movement about their respective longitudinal axis 6a, the workpiece carrier 6 in turn rotatably mounted on the workpiece holder 2 and for example in turn by means of a arranged in the workpiece holder 2 planetary gear (not shown) to be set in rotation.
- the workpieces that can be fixed to the workpiece carriers 6 of the workpiece holder 2 dip into a working container 8 which is filled with a powdered or particulate abrasive and / or polishing granulate, optionally with the addition of liquid processing aids, such as water, surfactants and the like, is filled.
- a powdered or particulate abrasive and / or polishing granulate optionally with the addition of liquid processing aids, such as water, surfactants and the like, is filled.
- the support part 4 of the towing machine 1a is set in rotation by means of the motor / gear arrangement 5, so that the workpiece holder 2 moves in a certain path of movement - here a circular path - through the working container 8 or dragged by the processing medium contained herein.
- the planetary gear housed in the support part 4 or in the workpiece holder 2 ensure a self-rotation of both the workpiece holder 2 and the workpiece carrier 6 or the workpieces fixed thereto about a substantially vertical axis here, which, however, also by a finite angle in Can be arranged inclined relative to the vertical. Due to the relative movement between the workpieces and the bed of abrasive and / or polishing granules of the processing medium, this leads to a surface treatment of the workpieces.
- controllable rotary drive in conjunction which similar to the in Fig. 2 shown embodiment (see below) may comprise a provided with a driving shaft support plate, the former engages from below in a complementary thereto receiving profile on the underside of the container 8 to provide a rotationally fixed connection with the container 8.
- the towing machine 1 a further comprises one or more sensors 9, which is / are designed to determine the distance between the sensor 9 and the filling level 10 of the grinding and / or polishing granules, by subtracting this distance from a known distance between the Sensor 9 and the workpiece the immersion depth of the same in the container 8 located in the bed of abrasive and / or polishing granules to determine.
- the surface contour of the grinding and / or polishing granules is in Fig. 1 schematically indicated by the dashed line 10 when the container 8 rotates.
- the sensors 9 may be, in particular, non-contact displacement or proximity sensors, such as ultrasound, laser or infrared sensors.
- the distance between the sensor 9 as a reference point and the respective workpiece or the workpiece carrier 6 of the workpiece holder 2, to which the Workpieces are releasably fixed, known it can be determined by simple subtraction, the immersion depth of the workpieces in the granular bed, in particular in real time during the surface treatment.
- the device 1a moreover comprises, in particular, a control device, not shown, in particular in the form of a data processing unit which is in operative connection with the sensors 9 and which is further connected to a lifting device, e.g. in the form of a connected to a control drive 11 threaded spindle 12, is operatively connected to at least raise the plate 4, optionally together with its drive 5, and the workpiece holders 2 fixed thereto with respect to the container 8 or lower, depending on whether the with Help detected by the sensor 9 actual immersion depth exceeds a desired immersion depth or below.
- the control device is furthermore equipped with an input device and a display device (likewise not shown) in order to determine the desired process parameters, such as, in particular, the desired nominal immersion depth, but also e.g. To enter the distance between the sensor 9 and a respective workpiece (or the respective workpiece holder 2 or more precisely: the respective workpiece carrier 6).
- the control device is also expediently equipped with a memory device in order to store various motion programs of the individually desired surface treatment.
- the control device can expediently also with the rotary drive (see. Fig. 2 ) of the container 8 and with the drive 5 of the plate 4 are operatively connected to the processing time of the workpieces and / or the relative speed of the workpiece holders 2 releasably fixed Workpieces with respect to the found in the container 8 bed of abrasive and / or polishing granules depending on the detected by means of the sensor 9 immersion depth of the workpiece holders 2 releasably fixed workpieces in the bed of grinding and / or polishing granules to change.
- the surface treatment can be carried out in a self-regulating manner as a function of the depth of immersion of the workpieces determined by the sensor into the granulate bed.
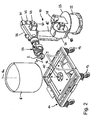
- Fig. 2 an embodiment of a device according to the invention in the form of a dip-finishing machine 1b is shown, wherein the same or equivalent components with the same reference numerals as in Fig. 1 are provided.
- the dip-finishing machine 1b in turn comprises a container 8 for receiving a grinding and / or polishing granules (not shown), which is rotatable about a vertical axis 8a.
- the container 8 is arranged on a carriage 14 which can be moved by means of rollers 13, in order to ensure a simple and rapid exchange of the granulate, in that a container 8 can be exchanged for another container 8.
- the carriage 14 includes, for example, arranged on its underside, motorized rotary drive (in Fig.
- a equipped with a cam shaft 15 support plate 16 includes, on which the container 8 rotatably and self-centering can be placed.
- the device 1b further comprises in the present case a manipulator in the form of a robot 20, which carries one or more workpiece holder 2 for releasably fixing a workpiece to be machined (not shown).
- the robot 20 is, for example, a multi-axis industrial robot which has a frame 22 on which a carousel 23 is pivotably mounted about a vertical axis.
- a boom 26 is mounted on a horizontal, parallel to the pivot axis of the bracket 24 axis.
- the boom 26 is equipped at its end with a three-axis robot hand 27 which carries the workpiece holder 2. While the carousel 23 is driven by a control motor 28 relative to the stationary frame 22, a control motor 29 for driving the rocker 25 and a control motor 30 for driving the boom 26.
- the three-axis robot hand 27 is of three other control motors 31, 32, 33rd driven, which are mounted, for example, on the robot hand 17 facing away from the end of the boom 26.
- the three-axis robot hand 27 with the workpiece holder 2 consequently allows the latter to pivot under any orientation in three-dimensional space, in order to align a workpiece fastened to the workpiece holder 2 in the desired position with respect to the granulate bed located in the container 8, as well as to move the workpiece holder 2 translationally in any spatial directions.
- the three-axis robot hand 27 can rotate the workpiece holder 2 at least about its longitudinal axis 2a, provided a rotation of the workpiece is desired in addition to a pure immersion grinding process.
- a sensor 9 is mounted, which for determining the distance between the sensor 9 and the level level 10 (FIG. Fig. 1 ) of the grinding and / or polishing granules is formed in order to determine by subtracting this distance from a known distance between the sensor 9 and the workpiece, the immersion depth thereof in the container 8 located in the bed of grinding and / or polishing granules.
- the sensor 9 can according to the according Fig. 1 be educated.
- Both the robot 20 with its control motors 28-33 and arranged on the workpiece holder 2 sensor 9 and the rotational drive of the container 8 are in turn operatively connected to a common control device (not shown), which in turn with an input, a display and a Memory device is connected to various motion programs both the workpiece holder 2 with respect to the rotating container 8 and movement programs of the container 8 itself (here: rotation) to enter, display, process and store.
- a common control device not shown
- a display and a Memory device is connected to various motion programs both the workpiece holder 2 with respect to the rotating container 8 and movement programs of the container 8 itself (here: rotation) to enter, display, process and store.
- control device is detachably fixed to the workpiece holder 2 as a function of the immersion depth detected with the aid of the sensor 9
- Workpiece in the granule bed located in the container 8 controls the robot 20 such that the workpiece holder 2 is raised or lowered with respect to the container 8, provided that the detected by means of the sensor 9 actual immersion depth over a desired target immersion depth or falls below.
- the control device may conveniently be in operative connection with the rotary drive of the container 8 to the processing time of the workpieces and / or the speed of the container 8 in response to the detected by means of the sensor 9 immersion depth of the workpiece holder 2 fixed workpiece in the bed from grinding and / or polishing granules to change.
- any movements of the robot 20 such as with regard to an increase / decrease in the speed of the robot hand 27 with the workpiece holder 2 about the axis 2a.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Finish Polishing, Edge Sharpening, And Grinding By Specific Grinding Devices (AREA)
Abstract
Description
Die Erfindung betrifft ein Verfahren zur Oberflächenbearbeitung von Werkstücken, indem das Werkstück in eine in einem Behälter befindliche Schüttung aus einem Schleif- und/oder Poliergranulat eingetaucht und in der Schüttung aus dem Schleif- und/oder Poliergranulat relativ zu diesem bewegt wird. Die Erfindung bezieht sich ferner auf eine insbesondere zur Durchführung eines solchen Verfahrens geeignete Vorrichtung zur Oberflächenbearbeitung von Werkstücken durch Eintauchen des Werkstückes in eine Schüttung aus einem Schleif- und/oder Poliergranulat unter relativer Bewegung derselben in Bezug auf das Werkstück, mit einem Behälter zur Aufnahme des Schleif und/oder Poliergranulates und mit einem oder mehreren Werkstückhalter(n), an welchem/welchen die zu bearbeitenden Werkstücke lösbar festlegbar sind, wobei der/die Werkstückhalter relativ zu dem Behälter bewegbar ist/sind (siehe z.B.
Derartige Vorrichtungen zur Oberflächenbearbeitung von Werkstücken sind beispielsweise in Form von sogenannten Schlepp- oder Tauchfinishmaschinen bekannt. Ihre Wirkungsweise beruht darauf, das zu bearbeitende Werkstück in eine in einem Behälter befindliche Schüttung aus einem Schleif- und/oder Poliergranulat zu tauchen und das Werkstück relativ zu dem Granulat zu bewegen, wodurch die Oberfläche des Werkstückes je nach Granulatart geschliffen und/oder poliert wird. Schleppfinishmaschinen stellen eine spezielle Form von Gleitschleifmaschinen dar, wobei die zu bearbeitenden Werkstücke anlässlich ihrer Oberflächenbearbeitung z.B. einzeln an einem oder mehreren Werkstückhaltern lösbar festgelegt werden. Schleppfinishmaschinen umfassen häufig ein in der Regel rotierendes Tragteil im Wesentlichen in Form eines z.B. motorisch über ein geeignetes Getriebe drehangetriebenen Tellers, an dessen Umfang mehrere Aufnahmen angeordnet sind, um die Werkstückhalter einzuspannen. Wird dieses Tragteil - der sogenannte Teller oder Rotor - der Schleppfinishmaschine rotiert, so beschreiben die hieran festgelegte Werkstückhalter eine Bahnkurve. Die an den Werkstückhaltern lösbar befestigten Werkstücke werden dabei in den Arbeitsbehälter eingetaucht, welcher mit der Schüttung aus dem partikelförmigen Schleif- oder Poliergranulat, gegebenenfalls unter Zusatz flüssiger Medien, wie Wasser, Tenside etc., befüllt ist. Aufgrund der Relativbewegung der Werkstücke in Bezug auf das Bearbeitungsmedium erfolgt deren Oberflächenbearbeitung in Form einer Gleitschleifbearbeitung. Derartige Schleppfinishmaschinen sind beispielsweise aus der
Alternativ oder zusätzlich kann der das Bearbeitungsmedium aufnehmende Behälter relativ zu den ebenfalls bewegten, beispielsweise zumindest um ihre eigene Achse rotierten, oder auch ruhenden Werkstücken bewegt werden, wie beispielsweise um seine eigene Achse und/oder entlang einer Bahnkurve, z.B. in Form einer Kreisbahn. Sofern nur der Behälter bewegt ist und die Werkstücke selbst keine translatorische Bewegung durchführen, so bezeichnet man dies auch als "Tauchschleifen" bzw. "Tauchpolieren" als spezielle Form des Schleppfinish.Alternatively or additionally, the container receiving the processing medium can be moved relative to the likewise moving workpieces which are rotated, for example at least about their own axis, or else at rest, such as, for example, about its own axis and / or along one of its axes Trajectory, eg in the form of a circular path. If only the container is moved and the workpieces themselves do not perform a translatory movement, then this is also referred to as "dip grinding" or "dip polishing" as a special form of drag finish.
Das Schleif- oder Poliergranulat kann grundsätzlich je nach zu behandelnden Werkstücken unterschiedlichster Natur und z.B. natürlichen Ursprungs (z.B. aus organischem Material, wie Walnuss- oder Kokosnussschalen, Holz, Kirschkern etc.), mineralischen Ursprungs (z.B. aus Silikaten, Oxiden etc.) und/oder synthetischen Ursprungs (z.B. aus Kunststoffen) sein. Darüber hinaus ist es - wie bereits angedeutet - möglich, die Gleitschleifbearbeitung trocken oder - unter Zusatz eines flüssigen Bearbeitungsmediums, wie beispielsweise Wasser, welches mit Additiven, wie z.B. Tensiden, versetzt sein kann - in Form einer Nassbearbeitung durchzuführen (
Der Einsatzbereich solcher Schlepp- und/oder Tauchfinishmaschinen umfasst neben der Oberflächenbearbeitung von Massenartikeln zunehmend die Bearbeitung von Präzisionsteilen mit relativ komplexer Geometrie, an deren Oberflächenbeschaffenheit sehr hohe Anforderungen gestellt werden und welche insbesondere sehr geringen Toleranzen genügen müssen. Lediglich exemplarisch seien in diesem Zusammenhang medizinische Prothesen, optische Linsen oder mechanische Präzisionsbauteile für die Maschinenbauindustrie erwähnt. Dies erfordert die Einhaltung sehr enger Verfahrensparameter bei der Schlepp- oder Tauchfinishbearbeitung sowie insbesondere eine sehr hohe Reproduzierbarkeit, um sicherzustellen, dass die Werkstücke in mehr oder identischer Weise mit der individuell gewünschten Oberflächenbeschaffenheit versehen werden. Neben der Auswahl des geeigneten Schleif- und/oder Poliergranulates (s.o.) spielen in diesem Zusammenhang insbesondere die Relativgeschwindigkeit zwischen dem Werkstück und den Granulatpartikeln, welche in der Regel mittels geeigneter Steuerantriebe des Behälters und/oder des Werkstückhalters einstellbar ist, die Bearbeitungszeit, welche ebenfalls in der Regel voreinstellbar ist, sowie die Eintauchtiefe des Werkstückes in die Schüttung aus Schleif- und/oder Poliergranulat eine Rolle, wobei aufgrund des zunehmenden Andruckes der Granulatpartikel auf das Werkstück mit zunehmender Eintauchtiefe desselben in die Granulatschüttung die abrasive Wirkung der Granulatpartikel auf das Werkstück mit zunehmender Eintauchtiefe zunimmt. Hinzu kommt insbesondere dann, wenn der das Schleif- und/oder Poliergranulat aufnehmende Behälter rotiert oder in andersartiger Weise translatorisch bewegt wird, dass die Schüttung aus den Granulatpartikeln infolge Zentrifugalkraft oder Massenträgheit eine unebene Oberflächenkontur in dem Behälter aufweist. Folglich stehen die vorgenannten Verfahrensparameter in einer nicht unerheblichen Weise miteinander in Wechselwirkung.The field of application of such drag and / or dip finishing machines, in addition to the surface treatment of mass-produced articles, increasingly involves the machining of precision parts with relatively complex geometry, very high demands are placed on the surface finish and which in particular must meet very small tolerances. By way of example only medical prostheses, optical lenses or mechanical precision components for the engineering industry may be mentioned in this context. This requires adherence to very tight process parameters in drag or dip finish machining and, in particular, very high reproducibility to ensure that the workpieces are more or more identical to the individually desired surface finish be provided. In addition to the selection of suitable grinding and / or polishing granules (see above), the relative speed between the workpiece and the granulate particles, which is usually adjustable by means of suitable control drives of the container and / or the workpiece holder, plays the processing time, which also As a rule, can be preset, as well as the immersion depth of the workpiece in the bed of abrasive and / or polishing granules a role, said due to the increasing pressure of the granules on the workpiece with increasing immersion depth of the same in the granular fill the abrasive effect of the granules on the workpiece increasing immersion depth increases. In addition, in particular when the container receiving the grinding and / or polishing granules is rotated or moved in a different manner in a translatory manner, the bed of granules has an uneven surface contour in the container due to centrifugal force or inertia. Consequently, the aforementioned process parameters interact with each other in a significant way.
Die
Der Erfindung liegt daher die Aufgabe zugrunde, ein Verfahren und eine Vorrichtung zur Oberflächenbearbeitung von Werkstücken der eingangs genannten Art auf einfache und kostengünstige Weise dahingehend weiterzubilden, um für eine einheitlichere und insbesondere reproduzierbarere Oberflächenbearbeitung der zu bearbeitenden Werkstücke zu sorgen, wobei insbesondere auch solchen Werkstücken eine Oberflächenbearbeitung ermöglicht werden sollte, welche sehr kleinen Toleranzen genügen müssen und/oder sehr hohe Anforderungen an eine genau definierte Oberflächenbeschaffenheit stellen.The invention is therefore the object of a method and an apparatus for surface treatment of workpieces of the type mentioned in a simple and cost-effective way to the effect to provide a more uniform and reproducible especially surface treatment of the workpieces to be machined, in particular, such workpieces a Surface treatment should be made possible, which must meet very small tolerances and / or make very high demands on a well-defined surface finish.
In verfahrenstechnischer Hinsicht wird diese Aufgabe erfindungsgemäß bei einem Verfahren zur Oberflächenbearbeitung von Werkstücken der eingangs genannten Art dadurch gelöst, dass die Eintauchtiefe des Werkstückes in die Schüttung aus Schleif- und/oder Poliergranulat anlässlich der Oberflächenbearbeitung durch Subtraktion des sensorisch ermittelten Abstandes zwischen einem oberhalb des Behälters angeordneten Sensor und dem Füllstandsniveau des Schleif- und/oder Poliergranulates in dem Behälter von einem bekannten Abstand zwischen dem Sensor und dem Werkstück ermittelt wird.In procedural terms, this object is achieved in a method for surface treatment of workpieces of the type mentioned in that the immersion depth of the workpiece in the bed of abrasive and / or polishing granules on the occasion of the surface treatment by subtracting the sensory determined distance between one above the container arranged sensor and the level of the grinding and / or polishing granules in the container is determined by a known distance between the sensor and the workpiece.
In vorrichtungstechnischer Hinsicht sieht die Erfindung zur Lösung dieser Aufgabe bei einer insbesondere zur Durchführung eines derartigen Verfahrens geeigneten Vorrichtung zur Oberflächenbearbeitung von Werkstücken der eingangs genannten Art vor, dass die Vorrichtung ferner wenigstens einen oberhalb des Behälters angeordneten Sensor aufweist, welcher zur Ermittlung des Abstandes zwischen dem Sensor und dem Füllstandsniveau des Schleif- und/oder Poliergranulates ausgebildet ist, um durch Subtraktion dieses Abstandes von einem bekannten Abstand zwischen dem Sensor und dem Werkstück - bzw. zwischen dem Sensor und dem das Werkstück tragenden Werkstückhalter - die Eintauchtiefe desselben in die in dem Behälter befindliche Schüttung aus Schleif- und/oder Poliergranulat zu ermitteln.In device-technical terms, the invention provides for solving this problem in a suitable in particular for carrying out such a method device for surface treatment of workpieces of the type mentioned above, that the device further comprises at least one arranged above the container sensor, which for determining the distance between the Sensor and the level of the grinding and / or polishing granules is designed to determine by subtracting this distance from a known distance between the sensor and the workpiece - or between the sensor and the workpiece holder supporting the workpiece - the immersion depth thereof in the container located in the bed of abrasive and / or polishing granules ,
Die erfindungsgemäße Ausgestaltung sieht demnach vor, die für den Grad der abrasiven Schleif- und/oder Polierwirkung der Granulatpartikel auf das Werkstück maßgebliche Eintauchtiefe desselben in die Granulatschüttung mit Hilfe eines Sensors zu ermitteln, so dass es einerseits möglich wird, insoweit für reproduzierbare Verfahrensbedingungen zu sorgen und/oder andererseits andere Verfahrensparameter hieran anzupassen. Die mit Hilfe des Sensors vorgesehene Ermittlung der tatsächlichen Eintauchtiefe des Werkstückes in die Granulatschüttung kann hierbei entweder zu Beginn des Oberflächenbearbeitungsvorgangs, beispielsweise bevor der Werkstückhalter einer Schleppfinishmaschine translatorisch in Bewegung versetzt wird, oder insbesondere auch während der Oberflächenbearbeitung, z.B. auch mehr oder minder kontinuierlich oder in regelmäßigen Zeitabständen in Echtzeit, erfolgen, so dass die von etwaigen Oberflächenkonturen der in dem Behälter aufgenommenen Granulatschüttung, welche sich z.B. durch Anstauen an dem in die Schüttun eingetauchten, relativ zu der Schüttung bewegten Werkstück(halter) oberhalb des Werkstückes akkumuliert, abhängige Eintauchtiefe mit noch größerer Exaktheit erfasst werden können. Die Eintauchtiefe des Werkstückes in die Schüttung aus Schleif- und/oder Poliergranulat wird erfindungsgemäß dadurch ermittelt, indem der Abstand zwischen dem oberhalb des Behälters angeordneten Sensor und dem Füllstandsniveau bzw. der Oberfläche des Schleif- und/oder Poliergranulates in dem Behälter oberhalb des Werkstückes ermittelt und von einem bekannten Abstand zwischen dem Sensor und dem Werkstück subtrahiert wird.The embodiment according to the invention therefore provides for determining the immersion depth thereof, which is decisive for the degree of abrasive grinding and / or polishing action of the granulate particles on the workpiece, in the granulate bed with the aid of a sensor so that on the one hand it is possible to ensure reproducible process conditions and / or on the other hand adapt other process parameters to this. The determination of the actual depth of immersion of the workpiece into the granulate bed provided with the aid of the sensor can be effected either at the beginning of the surface machining operation, for example before the workpiece holder of a drag finishing machine is set in motion, or in particular also during the surface processing, eg also more or less continuously or in regular time intervals in real time, done so that the accumulated by any surface contours of the granules in the container, which accumulates for example by damming on the immersed in Schüttun, moving relative to the bed workpiece (holder) above the workpiece, dependent immersion depth with greater accuracy can be detected. The immersion depth of the workpiece in the bed of abrasive and / or polishing granules is inventively determined by the distance between the arranged above the container sensor and the level level or the surface of the grinding and / or polishing granules determined in the container above the workpiece and subtracted from a known distance between the sensor and the workpiece.
Es sei an dieser Stelle darauf hingewiesen, dass mit "oberhalb des Behälters" angeordnetem Sensor im Rahmen der vorliegenden Offenbarung nicht notwendigerweise ein oberhalb des oberen Behälterrandes angeordneter Sensor gemeint ist, sondern ist es dem Fachmann vielmehr offensichtlich, dass der Sensor oberhalb der in dem Behälter befindlichen Schleif- und/oder Poliergranulatschüttung angeordnet sein muss, wobei er zumindest während der Oberflächenbearbeitung je nach Füllniveau des Behälters selbstverständlich auch im Innern des Behälters oberhalb dessen Bodens angeordnet sein und/oder von oben in den Behälter hineinragen kann.It should be noted at this point that with "sensor disposed above the vessel" in the context of the present disclosure is not necessarily meant a sensor located above the upper vessel rim, but it will be apparent to those skilled in the art that the sensor is above that in the vessel Of course, it must be arranged at least during the surface treatment depending on the filling level of the container, of course, also in the interior of the container above the bottom thereof and / or may protrude from above into the container located grinding and / or polishing granules.
Das erfindungsgemäße Verfahren bietet sich insbesondere, wenn auch nicht ausschließlich, für eine Verfahrensvariante an, bei welcher zumindest der Behälter während der Oberflächenbearbeitung des Werkstückes um eine im Wesentlichen senkrechte Achse rotiert wird, wobei das Werkstück lediglich in den Behälter eingetaucht ("Tauchfinishing") oder seinerseits zusätzlich translatorisch und/oder rotatorisch bewegt wird. In diesem Fall ermöglicht das Verfahren die Ermittlung der von der Drehgeschwindigkeit des Behälters, welche infolge Zentrifugalkräften zu einer geschwindigkeitsabhängigen Akkumulation der Granulatpartikel im Randbereich des Behälters führt, abhängigen Eintauchtiefe des Werkstückes in die rotatorisch bewegte Granulatschüttung.The method according to the invention lends itself, albeit not exclusively, to a variant of the method in which at least the container is rotated about a substantially vertical axis during surface machining of the workpiece, the workpiece merely immersed in the container ("dip finishing") or in turn is additionally moved translationally and / or rotationally. In this case, the method makes it possible to determine the depth of immersion of the workpiece dependent on the rotational speed of the container, which leads to a speed-dependent accumulation of the granulate particles in the edge region of the container as a result of centrifugal forces in the rotationally moving granular bed.
Eine entsprechende Vorrichtung zeichnet sich folglich dadurch aus, dass dem Behälter ein Rotationsantrieb zugeordnet ist, um ihn in Rotation zu versetzen. Indes kann alternativ oder zusätzlich selbstverständlich auch vorgesehen, dass der Werkstückhalter an einem relativ zu dem Behälter zur Aufnahme des Schleif- und/oder Poliergranulates bewegbaren, insbesondere rotierbaren, Teil angeordnet ist, wie es als solches bei gattungsgemäßen Schleppfinishmaschinen bekannt ist.A corresponding device is therefore characterized by the fact that the container is associated with a rotary drive to enable it to rotate. However, alternatively or additionally, of course, also provided that the workpiece holder is arranged on a relative to the container for receiving the grinding and / or polishing granules movable, in particular rotatable, part, as it is known as such in generic towing machines.
In vorteilhafter Ausgestaltung kann vorgesehen sein, dass der Abstand zwischen dem Sensor und dem Füllstandsniveau des Schleif- und/oder Poliergranulates mittels berührungsfreier Weg- und/oder Näherungssensoren oder mittels mechanischer Tastsensoren ermittelt wird, welche z.B. oberhalb des Werkstückes angeordnet werden können.In an advantageous embodiment it can be provided that the distance between the sensor and the filling level of the grinding and / or polishing granules is determined by means of non-contact displacement and / or proximity sensors or by means of mechanical tactile sensors, which e.g. can be arranged above the workpiece.
Eine erfindungsgemäße Vorrichtung weist zu diesem Zweck vorzugsweise einen Sensor auf, welcher von einem berührungsfreien Weg- und/oder Näherungssensor, insbesondere aus der Gruppe der induktiven, kapazitiven, magnetischen, optischen und elektromagnetischen Weg- und/oder Näherungssensoren, oder von einem mechanischen Sensor, insbesondere einem Tastsensor, gebildet ist.For this purpose, a device according to the invention preferably has a sensor which is provided by a non-contact displacement and / or proximity sensor, in particular from the group of inductive, capacitive, magnetic, optical and electromagnetic displacement and / or proximity sensors, or by a mechanical sensor, in particular a tactile sensor is formed.
Aus Gründen einer einfachen und kostengünstigen Ausgestaltung können hierbei bevorzugt Sensoren in Form von Lichtschranken, Ultraschall-, Laser-, Infrarotsensoren, Pendeltastern etc. zum Einsatz kommen. In diesem Zusammenhang haben sich beispielsweise Ultraschall- und Laserdistanzsensoren oder auch sogenannte Laserscanner bewährt, wobei insbesondere 2D-Laserscanner eingesetzt werden können, welche die Kontur von Gegenständen (hier: der Schleif- und/oder Poliergranulatschüttung) auf einer Ebene digital zu erfassen vermögen. Bei solchen 2D-Laserscannern handelt es sich um laseroptische Distanzsensoren, welche von dem Laser-Triangulationsverfahren Gebrauch machen, d.h. eine Laserlichtquelle des Sensors projiziert einen Laserpunkt auf die Granulatoberfläche, wonach das dort reflektierte Licht in Abhängigkeit von der Entfernung unter einem bestimmten Winkel auf einen Empfänger des Sensors auftrifft. Durch die Position des Lichtpunktes auf dem Empfänger und aus der Distanz der Laserlichtquelle zu dem Empfänger wird dann der Abstand zu der Granulatoberfläche in dem Sensor elektronisch berechnet. Darüber hinaus haben sich auch mechanische Tastsensoren in Form von sogenannten Pendeltastern bewährt, welche am freien Ende ihres Pendels einen auf der Granulatoberfläche aufliegenden "Schwimmer" umfassen und in Abhängigkeit der Auslenkung des Pendels aus dem Auslenkwinkel das Füllstandsniveau des Granulates bestimmen können.For reasons of a simple and cost-effective configuration, sensors in the form of light barriers, ultrasound, laser, infrared sensors, pendulum buttons, etc. may preferably be used here. In this context, for example, ultrasonic and laser distance sensors or so-called laser scanner have proven, in particular 2D laser scanner can be used, which are able to detect the contour of objects (here: the grinding and / or polishing granules) on a plane digitally. Such 2D laser scanners are laser-optical distance sensors, which are of the laser triangulation method Make use, ie a laser light source of the sensor projects a laser spot on the granule surface, after which the light reflected there, depending on the distance at a certain angle incident on a receiver of the sensor. The position of the light spot on the receiver and the distance of the laser light source to the receiver then electronically calculates the distance to the granule surface in the sensor. In addition, mechanical touch sensors in the form of so-called pendulum push-buttons, which at the free end of their pendulum comprise a "float" resting on the granule surface and can determine the fill level of the granulate as a function of the deflection of the pendulum from the deflection angle.
Wie bereits angedeutet, kann der Sensor hierbei zweckmäßig oberhalb oder auf dem Niveau des Werkstückhalters angeordnet sein, um den Abstand zwischen dem Sensor und dem Füllstandsniveau des Schleif- und/oder Poliergranulates in dem Behälter oberhalb des Werkstückes ermitteln und von einem bekannten Abstand zwischen dem Sensor und dem Werkstück bzw. zwischen dem Sensor und dem das Werkstück tragenden Werkstückhalter subtrahieren zu können.As already indicated, the sensor can be expediently arranged above or at the level of the workpiece holder in order to determine the distance between the sensor and the fill level of the grinding and / or polishing granules in the container above the workpiece and a known distance between the sensor and to be able to subtract the workpiece or between the sensor and the workpiece holder carrying the workpiece.
Wie bereits erwähnt, bietet das erfindungsgemäße Verfahren insbesondere die Möglichkeit einer Selbstregulierung dahingehend, dass die mit Hilfe des Sensors ermittelte tatsächliche Eintauchtiefe des Werkstückes stets mit einer gewünschten Eintauchtiefe verglichen wird und letztere nachjustiert wird, und/oder andere, von der mit Hilfe des Sensors ermittelten Eintauchtiefe abhängigen Verfahrensparameter werden an die ermittelte tatsächliche Eintauchtiefe angepasst. In diesem Zusammenhang kann gemäß einer vorteilhaften Ausgestaltung des Verfahrens vorgesehen sein, dass die ermittelte tatsächliche Eintauchtiefe des Werkstückes in die Schüttung aus Schleif- und/oder Poliergranulat verwendet wird, um das Werkstück entsprechend der gewünschten Eintauchtiefe in die Schüttung aus Schleif- und/oder Poliergranulat anzuheben oder abzusenken.As already mentioned, the method according to the invention offers, in particular, the possibility of self-regulation in that the actual depth of immersion of the workpiece determined with the aid of the sensor is always compared with a desired immersion depth and the latter is readjusted, and / or others determined by means of the sensor Immersion depth dependent process parameters are adapted to the determined actual immersion depth. In this connection, according to an advantageous Design of the method may be provided that the determined actual depth of immersion of the workpiece is used in the bed of abrasive and / or polishing granules to raise or lower the workpiece according to the desired immersion depth in the bed of grinding and / or polishing granules.
Gemäß einer alternativen oder zusätzlichen vorteilhaften Ausgestaltung kann diesbezüglich vorgesehen sein, dass die ermittelte tatsächliche Eintauchtiefe verwendet wird, um wenigstens einen Parameter aus der Gruppe Relativgeschwindigkeit des Werkstückes in Bezug auf die Schüttung aus Schleif- und/oder Poliergranulat (d.h. mit zunehmender Eintauchtiefe des Werkstückes in die Granulatschüttung kann die Relativgeschwindigkeit vermindert werden, während letztere bei abnehmender Eintauchtiefe des Werkstückes in die Granulatschüttung erhöht werden kann) und Bearbeitungszeit (d.h. mit zunehmender Eintauchtiefe des Werkstückes in die Granulatschüttung kann die Bearbeitungszeit vermindert werden, während letztere bei abnehmender Eintauchtiefe des Werkstückes in die Granulatschüttung verlängert werden kann) in Abhängigkeit hiervon zu verändern.According to an alternative or additional advantageous embodiment can be provided in this regard that the determined actual immersion depth is used to at least one parameter from the group relative speed of the workpiece with respect to the bed of abrasive and / or polishing granules (ie with increasing immersion depth of the workpiece in the granular bed, the relative speed can be reduced, while the latter can be increased with decreasing depth of immersion of the workpiece in the granule) and processing time (ie, with increasing depth of immersion of the workpiece in the granules, the processing time can be reduced, while the latter with decreasing immersion depth of the workpiece in the granule can be extended) in response to change.
In vorrichtungstechnischer Hinsicht sieht eine bevorzugte Ausführungsform demnach vor, dass der Sensor mit einer Steuereinrichtung wirkverbunden ist, welche ferner mit einer dem Werkstückhalter zugeordneten Hubeinrichtung wirkverbunden ist, um das Werkstück in Abhängigkeit der mit Hilfe des Sensors ermittelten tatsächlichen Eintauchtiefe in die Schüttung aus Schleif- und/oder Poliergranulat entsprechend der gewünschten Eintauchtiefe in die Schüttung aus Schleif- und/oder Poliergranulat anzuheben oder abzusenken.In terms of device technology, a preferred embodiment therefore provides that the sensor is operatively connected to a control device, which is further operatively connected to a lifting device associated with the workpiece holder to the workpiece depending on the determined using the sensor actual immersion depth in the bed of grinding and / or polishing granules according to the desired immersion depth in the bed of grinding and / or polishing granules to raise or lower.
Alternativ oder zusätzlich kann vorzugsweise vorgesehen sein, dass der Sensor mit einer, z.B. mit derselben, Steuereinrichtung wirkverbunden ist, welche ferner mit einem Antrieb des Behälters und/oder des Werkstückhalters wirkverbunden ist, um
- die Relativgeschwindigkeit des an dem Werkstückhalter lösbar festgelegten Werkstückes in Bezug auf die in dem Behälter befindliche Schüttung aus Schleif- und/oder Poliergranulat in Abhängigkeit der mit Hilfe des Sensors ermittelten Eintauchtiefe des an dem Werkstückhalter lösbar festgelegten Werkstückes in die Schüttung aus Schleif- und/oder Poliergranulat zu verändern; und/oder
- die Bearbeitungszeit des Werkstückes in Abhängigkeit der mit Hilfe des Sensors ermittelten Eintauchtiefe des an dem Werkstückhalter lösbar festgelegten Werkstückes in die Schüttung aus Schleif- und/oder Poliergranulat zu verändern.
- the relative speed of the workpiece releasably fixed to the workpiece holder with respect to the in-container bed of grinding and / or polishing granules depending on the detected by means of the sensor immersion depth of the workpiece holder releasably fixed workpiece in the bed of grinding and / or To change polishing granules; and or
- to change the machining time of the workpiece as a function of the depth of immersion of the work piece releasably fixed to the workpiece holder in the bed of abrasive and / or polishing granules.
Wie eingangs angesprochen, ist es in vielen Fällen erwünscht, dass der Schüttung aus Schleif- und/oder Poliergranulat ein flüssiges Bearbeitungsmedium, wie Wasser, welches gegebenenfalls mit Additiven, wie Tensiden etc., versetzt sein kann, zugesetzt wird. Um auch insoweit für möglichst reproduzierbare Bearbeitungsparameter zu sorgen, kann gemäß einer Weiterbildung des erfindungsgemäßen Verfahrens vorgesehen sein, dass dem Schleif- und/oder Poliergranulat ein flüssiges Bearbeitungsmedium zugesetzt wird, wobei die Menge an zugesetztem Bearbeitungsmedium gesteuert wird. Sofern eine Zirkulation des flüssigen Bearbeitungsmediums, gegebenenfalls unter Zwischenschaltung einer Reinigungsstufe, erwünscht ist und der Behälter hierzu ferner einen Ablauf für das flüssige Bearbeitungsmedium umfasst, kann selbstverständlich auch die aus dem Behälter abgeführte Menge an flüssigem Bearbeitungsmedium gesteuert werden.As mentioned at the outset, in many cases it is desirable for the bed of grinding and / or polishing granules to be admixed with a liquid processing medium, such as water, which may optionally be admixed with additives, such as surfactants, etc. In order to ensure as far as possible reproducible processing parameters, can be provided according to a development of the method according to the invention that the grinding and / or polishing granules, a liquid processing medium is added, wherein the amount of added processing medium is controlled. If a circulation of the liquid processing medium, optionally with the interposition of a cleaning stage, is desired and the container further comprises a drain for the liquid processing medium for this purpose, can of course also be controlled from the container discharged amount of liquid processing medium.
Der Behälter einer entsprechenden Vorrichtung weist vorzugsweise einen mit einer steuerbaren Dosierpumpe versehenen Einlass auf, um dem in dem Behälter befindlichen Schleif- und/oder Poliergranulat eine steuerbare Menge eines flüssigen Bearbeitungsmediums zuzusetzen. Entsprechendes kann für einen gegebenenfalls vorgesehenen Auslass aus dem Behälter gelten. Die Dosierpumpen können hierbei gleichfalls an eine, insbesondere zentrale, Steuereinrichtung angeschlossen sein.The container of a corresponding device preferably has an inlet provided with a controllable metering pump in order to add a controllable amount of a liquid processing medium to the grinding and / or polishing granules contained in the container. The same can apply to an optionally provided outlet from the container. The dosing pumps can likewise be connected to a, in particular central, control device.
Weitere Merkmale und Vorteile der Erfindung ergeben sich aus der nachfolgenden Beschreibung von Ausführungsbeispielen unter Bezugnahme auf die Zeichnungen. Dabei zeigen:
- Fig. 1
- eine schematische Schnittansicht eines Ausführungsbeispiels einer Vorrichtung zur Oberflächenbearbeitung von Werkstücken in Form einer Schleppfinishmaschine; und
- Fig. 2
- eine schematische perspektivische Explosionsdarstellung eines Ausführungsbeispiels einer Vorrichtung zur Oberflächenbearbeitung von Werkstücken in Form eines Tauchfinishmaschine.
- Fig. 1
- a schematic sectional view of an embodiment of an apparatus for the surface treatment of workpieces in the form of a drag finishing machine; and
- Fig. 2
- a schematic perspective exploded view of an embodiment of an apparatus for the surface treatment of workpieces in the form of a dip-finishing machine.
In
Der Werkstückhalter 2 kann beispielsweise zur Aufnahme mehrerer, im Wesentlichen vertikal spannbarer Werkstücke (nicht dargestellt) ausgebildet sein und hierzu an seiner der Spannverbindung 3 mit dem Tragteil 4 abgewandten, in
Beim Betrieb der Schleppfinishmaschine 1a tauchen zumindest die an den Werkstückträgern 6 des Werkstückhalters 2 festlegbaren Werkstücke in einen Arbeitsbehälter 8 ein, welcher mit einem pulver- oder partikelförmigen Schleif- und/oder Poliergranulat, gegebenenfalls unter Zusatz flüssiger Bearbeitungshilfsstoffen, wie Wasser, Tensiden und dergleichen, befüllt ist. Zur Oberflächenbearbeitung von an den Werkstückträgern 6 festgespannten Werkstücken (nicht gezeigt) wird das Tragteil 4 der Schleppfinishmaschine 1a mittels der Motor-/Getriebeanordnung 5 in Rotation versetzt, so dass der Werkstückhalter 2 auf einer bestimmten Bewegungsbahn - hier einer Kreisbahn - translatorisch durch den Arbeitsbehälter 8 bzw. durch das hierin enthaltene Bearbeitungsmedium geschleppt wird. Darüber hinaus sorgen die in dem Tragteil 4 bzw. in dem Werkstückhalter 2 aufgenommenen Planetengetriebe für eine Eigenrotation sowohl des Werkstückhalters 2 als auch der Werkstückträger 6 bzw. der hieran festgelegten Werkstücke um eine hier im Wesentlichen vertikale Achse, welche jedoch auch um einen endlichen Winkel in Bezug auf die Vertikale geneigt angeordnet sein kann. Aufgrund der Relativbewegung zwischen den Werkstücken und der Schüttung aus Schleif- und/oder Poliergranulat des Bearbeitungsmediums kommt es hierbei zu einer Oberflächenbearbeitung der Werkstücke.During operation of the
Eine solche Relativbewegung ist bei dem vorliegenden Ausführungsbeispiel durch eine zusätzliche Bewegbarkeit des Arbeitsbehälters 8 unterstützt, wie insbesondere durch eine Drehung desselben um dessen Mittelachse 8a. Der Behälter 8 steht zu diesem Zweck mit einem in
Die Schleppfinishmaschine 1a umfasst ferner einen oder mehrere Sensoren 9, welche(r) zur Ermittlung des Abstandes zwischen dem Sensor 9 und dem Füllstandsniveau 10 des Schleif- und/oder Poliergranulates ausgebildet ist/sind, um durch Subtraktion dieses Abstandes von einem bekannten Abstand zwischen dem Sensor 9 und dem Werkstück die Eintauchtiefe desselben in die in dem Behälter 8 befindliche Schüttung aus Schleif- und/oder Poliergranulat zu ermitteln. Die Oberflächenkontur des Schleif- und/oder Poliergranulates ist in
Die Vorrichtung 1a umfasst darüber hinaus insbesondere eine nicht dargestellte Steuereinrichtung, wie insbesondere in Form einer Datenverarbeitungseinheit, welche mit den Sensoren 9 in Wirkverbindung steht und welche ferner mit einer Hubeinrichtung, z.B. in Form einer mit einem Steuerantrieb 11 verbundenen Gewindespindel 12, in Wirkverbindung steht, um zumindest den Teller 4, gegebenenfalls mitsamt seinem Antrieb 5, und den hieran festgelegten Werkstückhaltern 2 in Bezug auf den Behälter 8 anzuheben oder abzusenken, je nach dem, ob die mit Hilfe des Sensors 9 erfasste tatsächliche Eintauchtiefe eine gewünschte Eintauchtiefe über- oder unterschreitet. Die Steuereinrichtung ist hierzu ferner mit einer Eingabe- und einer Anzeigeeinrichtung (ebenfalls nicht gezeigt) ausgestattet, um die gewünschten Verfahrensparameter, wie insbesondere die gewünschte Soll-Eintauchtiefe, aber auch z.B. den Abstand zwischen dem Sensor 9 und einem jeweiligen Werkstück (bzw. dem jeweiligen Werkstückhalter 2 oder genauer: dessen jeweiligem Werkstückträger 6) eingeben zu können. Die Steuereinrichtung ist überdies zweckmäßig mit einer Speichereinrichtung ausgestattet, um verschiedene Bewegungsprogramme der individuell gewünschten Oberflächenbearbeitung zu speichern.The
Die Steuereinrichtung kann zweckmäßigerweise darüber hinaus mit dem Drehantrieb (vgl.
In
Während zur Halterung eines zu bearbeitenden Werkstückes grundsätzlich auch ein mehr oder minder stationärer, d.h. lediglich höhenverstellbarer Werkstückhalter vorgesehen sein kann (nicht gezeigt), um die zu bearbeitenden Werkstücke in die in dem Behälter 8 befindliche Granulatschüttung einzutauchen, umfasst die Vorrichtung 1b im vorliegenden Fall ferner einen Manipulator in Form eines Roboters 20, welcher einen oder mehrere Werkstückhalter 2 zum lösbaren Festlegen eines zu bearbeitenden Werkstückes (nicht gezeigt) trägt. Bei dem Roboter 20 handelt es sich beispielsweise um einen mehrachsigen Industrieroboter, welcher ein Gestell 22 aufweist, auf welchem ein Karussell 23 um eine vertikale Achse schwenkbar gelagert ist. Auf dem Karussell 23 sitzt eine Konsole 24 mit einem horizontalen Lager für eine Schwinge 25, an deren der Konsole 24 abgewandtem (oberen) Ende wiederum ein Ausleger 26 an einer horizontalen, parallel zur Schwenkachse der Konsole 24 angeordneten Achse gelagert ist. Der Ausleger 26 ist an seinem Ende mit einer dreiachsigen Roboterhand 27 ausgestattet, welche den Werkstückhalter 2 trägt. Während das Karussell 23 über einen Steuermotor 28 gegenüber dem stationären Gestell 22 angetrieben ist, dient ein Steuermotor 29 zum Antrieb der Schwinge 25 und ein Steuermotor 30 für den Antrieb des Auslegers 26. Die dreiachsige Roboterhand 27 ist von drei weiteren Steuermotoren 31, 32, 33 angetrieben, welche z.B. an dem der Roboterhand 17 abgewandten Ende des Auslegers 26 montiert sind. Die dreiachsige Roboterhand 27 mit dem Werkstückhalter 2 vermag letzteren folglich sowohl unter einer beliebigen Ausrichtung im dreidimensionalen Raum zu verschwenken, um ein an dem Werkstückhalter 2 befestigtes Werkstück in der gewünschten Position in Bezug auf die in dem Behälter 8 befindliche Granulatschüttung auszurichten, als auch den Werkstückhalter 2 translatorisch in beliebige Raumrichtungen zu verfahren. Darüber hinaus vermag die dreiachsige Roboterhand 27 den Werkstückhalter 2 zumindest um seine Längsachse 2a zu rotieren, sofern neben einem reinen Tauchschleifvorgang eine Rotation des Werkstückes erwünscht ist.While for holding a workpiece to be machined in principle a more or less stationary, ie only height adjustable workpiece holder can be provided (not shown) to immerse the workpieces to be processed in the granules located in the container 8, the device 1b further comprises in the present case a manipulator in the form of a
An dem Werkstückhalter 2 ist wiederum ein Sensor 9 montiert, welcher zur Ermittlung des Abstandes zwischen dem Sensor 9 und dem Füllstandsniveau 10 (
Sowohl der Roboter 20 mit seinen Steuermotoren 28-33 und dem an dem Werkstückhalter 2 angeordneten Sensor 9 als auch der Rotationsantrieb des Behälters 8 sind wiederum mit einer gemeinsamen Steuereinrichtung (nicht dargestellt) wirkverbunden, welche ihrerseits mit einer Eingabe-, einer Anzeige- und einer Speichereinrichtung verbunden ist, um verschiedene Bewegungsprogramme sowohl des Werkstückhalters 2 in Bezug auf den rotierenden Behälter 8 als auch Bewegungsprogramme des Behälters 8 selbst (hier: Rotation) einzugeben, anzuzeigen, abzuarbeiten und zu speichern. Hierbei ist insbesondere vorgesehen, dass die Steuereinrichtung in Abhängigkeit der mit Hilfe des Sensors 9 erfassten Eintauchtiefe eines an dem Werkstückhalter 2 lösbar festgelegten Werkstückes in die in dem Behälter 8 befindliche Granulatschüttung den Roboter 20 derart ansteuert, dass der Werkstückhalter 2 in Bezug auf den Behälter 8 angehoben bzw. abgesenkt wird, sofern die der mit Hilfe des Sensors 9 erfasste tatsächliche Eintauchtiefe eine gewünschte Soll-Eintauchtiefe über- bzw. unterschreitet. Die Steuereinrichtung kann zweckmäßigerweise überdies mit dem Drehantrieb des Behälters 8 in Wirkverbindung stehen, um die Bearbeitungszeit der Werkstücke und/oder die Drehzahl des Behälters 8 in Abhängigkeit von der der mit Hilfe des Sensors 9 ermittelten Eintauchtiefe des an dem Werkstückhalter 2 befestigten Werkstückes in die Schüttung aus Schleif- und/oder Poliergranulat zu verändern. Entsprechendes gilt freilich auch für etwaige Bewegungen des Roboters 20, wie beispielsweise im Hinblick auf eine Erhöhung/Verminderung der Drehzahl der Roboterhand 27 mit dem Werkstückhalter 2 um die Achse 2a.Both the
Folglich ist auch hier eine in höchstem Maße reproduzierbare Oberflächenbearbeitung von praktisch beliebigen Werkstücken unter exakt vorgegebenen Verfahrensparametern möglich, wobei insbesondere auch Werkstücke bearbeitet werden können, an deren Oberflächenbeschaffenheit sehr hohe Anforderungen gestellt werden und welche sehr geringen Toleranzen genügen müssen. Ferner kann die Oberflächenbearbeitung selbstregulierend in Abhängigkeit der sensorisch ermittelten Eintauchtiefe der Werkstücke in die Granulatschüttung erfolgen.Consequently, a highly reproducible surface processing of virtually any workpieces under exactly predetermined process parameters is possible here, in particular, workpieces can be edited on the surface very high demands are made and which must meet very small tolerances. Furthermore, the surface treatment can be self-regulating depending on the sensory depth of immersion of the workpieces in the granule bed.
Claims (15)
- Method for processing the surface of workpieces by immersing the workpiece in a bed of grinding and/or polishing granules located in a container (8) and moving it in the bed of grinding and/or polishing granules in relation thereto, characterized in that the depth of immersion of the workpiece into the bed of grinding and/or polishing granules is determined on the occasion of the surface processing by subtraction of the sensorily determined distance between a sensor (9) arranged above the container (8) and the filling level (10) of the grinding and/or polishing granules in the container (8) from a known distance between the sensor (9) and the workpiece.
- Method according to Claim 1, characterized in that at least the container (8) is rotated about a substantially perpendicular axis (8a) during the surface processing of the workpiece.
- Method according to Claim 1 or 2, characterized in that the distance between the sensor (9) and the filling level (10) of the grinding and/or polishing granules is determined by means of contactless displacement and/or proximity sensors (9) or mechanical feeling sensors.
- Method according to one of Claims 1 to 3, characterized in that the determined actual depth of immersion of the workpiece into the bed of grinding and/or polishing granules is used to raise or lower the workpiece in accordance with the desired depth of immersion into the bed of grinding and/or polishing granules.
- Method according to one of Claims 1 to 4, characterized in that the determined actual depth of immersion is used to change at least one parameter from the group comprising the relative speed of the workpiece with respect to the bed of grinding and/or polishing granules and the machining time in dependence thereon.
- Method according to one of Claims 1 to 5, characterized in that a liquid processing medium is added to the grinding and/or polishing granules, the amount of added processing medium being controlled.
- Device (1a, 1b) for processing the surface of workpieces by immersing the workpiece in a bed of grinding and/or polishing granules while the same undergoes relative movement with respect to the workpiece, in particular for carrying out a method according to one of the preceding claims, comprising a container (8) for receiving the grinding and/or polishing granules and comprising one or more workpiece holder(s) (2), on which the workpieces to be processed can be releasably fixed, the workpiece holder(s) (2) being movable in relation to the container (8), characterized in that the device (1a, 1b) also has at least one sensor (9), which is arranged above the container (8) and is designed for determining the distance between the sensor (9) and the filling level (10) of the grinding and/or polishing granules in order to determine by subtraction of this distance from a known distance between the sensor (9) and the workpiece the depth of immersion of the same into the bed of grinding and/or polishing granules located in the container (8).
- Device according to Claim 7, characterized in that the container (8) is assigned a rotary drive in order to set it in rotation.
- Device according to Claim 7 or 8, characterized in that the workpiece holder (2) is arranged on a part (4, 27) that is movable, in particular rotatable, in relation to the container (8) for receiving the grinding and/or polishing granules.
- Device according to one of Claims 7 to 9, characterized in that the sensor (9) is formed by a contactless displacement and/or proximity sensor, in particular from the group comprising inductive, capacitive, magnetic, optical and electromagnetic displacement and/or proximity sensors, or by a mechanical sensor, in particular a feeling sensor.
- Device according to Claim 10, characterized in that the sensor (9) is a light barrier, an ultrasonic, laser or infrared sensor or a pendulum sensor.
- Device according to one of Claims 7 to 11, characterized in that the sensor (9) is arranged above or at the level of the workpiece holder (2).
- Device according to one of Claims 7 to 12, characterized in that the sensor (9) is operatively connected to a controlling unit, which is also operatively connected to a lifting unit (11, 12; 20) assigned to the workpiece holder (2), in order to raise or lower the workpiece in dependence on the actual depth of immersion, determined with the aid of the sensor (9), into the bed of grinding and/or polishing granules in accordance with the desired depth of immersion into the bed of grinding and/or polishing granules.
- Device according to one of Claims 7 to 13, characterized in that the sensor (9) is operatively connected to a controlling unit, which is also operatively connected to a drive of the container (8) and/or of the workpiece holder (2), in order to- change the relative speed of the workpiece releasably fixed on the workpiece holder (2) with respect to the bed of grinding and/or polishing granules located in the container (8) in dependence on the depth of immersion, determined with the aid of the sensor (9), of the workpiece releasably fixed on the workpiece holder (2) into the bed of grinding and/or polishing granules;
and/or- change the processing time of the workpiece in dependence on the depth of immersion, determined with the aid of the sensor (9), of the workpiece releasably fixed on the workpiece holder (2) into the bed of grinding and/or polishing granules. - Device according to one of Claims 7 to 14, characterized in that the container (8) has an inlet provided with a controllable metering pump, in order to add a controllable amount of a liquid processing medium to the grinding and/or polishing granules located in the container (8).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102011113167A DE102011113167A1 (en) | 2011-09-14 | 2011-09-14 | Method and device for the surface treatment of workpieces |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2572829A1 EP2572829A1 (en) | 2013-03-27 |
| EP2572829B1 true EP2572829B1 (en) | 2013-11-20 |
Family
ID=46796239
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12005929.0A Not-in-force EP2572829B1 (en) | 2011-09-14 | 2012-08-17 | Device and method for processing the surface of workpieces |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP2572829B1 (en) |
| CN (1) | CN102990501B (en) |
| DE (1) | DE102011113167A1 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016104148A1 (en) | 2016-03-08 | 2017-09-14 | Andreas Boigner | Device and method for surface treatment of components |
| CN110774158A (en) * | 2019-11-13 | 2020-02-11 | 罗厚镇 | Passivation device for cutting tool of numerical control machine tool |
| DE102019008802A1 (en) * | 2019-12-18 | 2021-06-24 | OTEC Präzisonsfinish GmbH | Method and device for the surface treatment of workpieces |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102012216724A1 (en) * | 2012-09-19 | 2014-03-20 | Carl Zeiss Vision International Gmbh | Method for polishing molds for manufacturing eyeglass lens, involves generating probabilistic relative movement between eyeglass lens and polishing main portion, so that main portion surface is in abrasive interact with lens surface |
| ES2634901T3 (en) | 2013-04-09 | 2017-09-29 | Otec Präzisionsfinish GmbH | Procedure and device for machining workpiece surfaces |
| CN104416636B (en) * | 2013-08-27 | 2017-08-29 | 中集集团集装箱控股有限公司 | Remove the blue or green method and apparatus of thick bamboo tube surface bamboo |
| CN104044052B (en) * | 2014-06-19 | 2017-01-11 | 丹阳市鑫烨光学仪器有限公司 | Machining device for manufacturing total-type particles with shot particles |
| CN104556660B (en) * | 2015-01-29 | 2017-03-15 | 合肥京东方光电科技有限公司 | The arrangement for adjusting height of support column |
| DE102016103156A1 (en) | 2016-02-23 | 2017-08-24 | db-matik GmbH | Process for the surface treatment of workpieces |
| CN106002587B (en) * | 2016-05-20 | 2018-02-23 | 五邑大学 | Workpiece surface treatment equipment based on translation circular-rotation |
| CN106670949B (en) * | 2016-12-26 | 2018-10-02 | 广东迪生力汽配股份有限公司 | A kind of wheel hub burnishing device and method |
| CN107234546A (en) * | 2017-07-28 | 2017-10-10 | 津上精密机床(浙江)有限公司 | A kind of feeding grinder control system |
| TWI647038B (en) * | 2018-04-25 | 2019-01-11 | 郭錫池 | Multi-axis grinding equipment |
| CN110405351B (en) * | 2019-06-29 | 2021-04-27 | 东莞泰升玻璃有限公司 | Glass surface laser engraving method |
| CN112428088A (en) * | 2020-11-20 | 2021-03-02 | 中车唐山机车车辆有限公司 | Wire drawing equipment, workpiece wire drawing processing method, control device and storage medium |
| DE102021101245A1 (en) | 2021-01-21 | 2022-07-21 | Rösler Holding Gmbh | PROCEDURE FOR MONITORING A TUBE FINISHING PROCESS |
| CN115555979A (en) * | 2022-09-19 | 2023-01-03 | 大连瑞谷科技有限公司 | Holder auxiliary finishing device |
| CN115741444B (en) * | 2022-11-21 | 2023-08-01 | 滁州市成业机械制造股份有限公司 | Processing machine tool for multistage centrifugal pump impeller |
| CN116276606B (en) * | 2023-05-04 | 2024-07-02 | 浙江湖磨抛光磨具制造有限公司 | Crankshaft finishing machine |
| CN116871898B (en) * | 2023-08-11 | 2024-01-26 | 青岛鼎正智能科技有限公司 | Intelligent rough milling device for injection mold machining |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2511628B1 (en) * | 1981-08-20 | 1985-10-31 | Parker Ste Continentale | DEVICE FOR THE MAINTENANCE OF A TRIBOFINITION SYSTEM, IN PARTICULAR ITS BED OF ABRASIVE ELEMENTS |
| EP1433569B1 (en) * | 1997-12-10 | 2006-09-13 | Shuji Kawasaki | Barrel-polishing apparatus |
| WO2000029171A1 (en) * | 1998-11-14 | 2000-05-25 | MTU MOTOREN- UND TURBINEN-UNION MüNCHEN GMBH | System for the precision machining of rotationally symmetrical components |
| DE20005361U1 (en) | 2000-03-23 | 2000-06-15 | OTEC Präzisionsfinish GmbH, 75334 Straubenhardt | Workpiece holder for drag finishing machines |
| DE10204267C1 (en) | 2002-02-02 | 2003-04-24 | Otec Praezisionsfinish Gmbh | Workpiece holder for pullthrough finishing grinders uses adapter faces on clamp top and bottom surface parts to close together as work-holder and clamp join together |
| KR100717702B1 (en) * | 2002-11-29 | 2007-05-11 | 신토 브레이터 가부시키가이샤 | Barrel polishing method, and barrel polishing device |
| DE102009004916B4 (en) | 2009-01-16 | 2014-05-22 | Otec Präzisionsfinish GmbH | Process for the surface treatment of workpieces using an aggregate-loaded, liquid processing medium and processing medium with such additives |
| DE102009021824A1 (en) * | 2009-05-18 | 2010-11-25 | Rolls-Royce Deutschland Ltd & Co Kg | Method for edge chamfering and rounding metal components, particularly compressor and turbine disks, involves exchanging components into grinding medium |
| CN201632923U (en) * | 2009-09-18 | 2010-11-17 | 廊坊市北方天宇机电技术有限公司 | Rotating spindle type finishing machine |
| CN102107377A (en) * | 2009-12-23 | 2011-06-29 | 沈阳黎明航空发动机(集团)有限责任公司 | Double-driving shaft composite automatic finishing method for blisk |
-
2011
- 2011-09-14 DE DE102011113167A patent/DE102011113167A1/en not_active Withdrawn
-
2012
- 2012-08-17 EP EP12005929.0A patent/EP2572829B1/en not_active Not-in-force
- 2012-09-12 CN CN201210336803.5A patent/CN102990501B/en not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016104148A1 (en) | 2016-03-08 | 2017-09-14 | Andreas Boigner | Device and method for surface treatment of components |
| CN110774158A (en) * | 2019-11-13 | 2020-02-11 | 罗厚镇 | Passivation device for cutting tool of numerical control machine tool |
| DE102019008802A1 (en) * | 2019-12-18 | 2021-06-24 | OTEC Präzisonsfinish GmbH | Method and device for the surface treatment of workpieces |
| WO2021122736A1 (en) | 2019-12-18 | 2021-06-24 | Otec Präzisionsfinish GmbH | Method and device for treating the surface of workpieces |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102990501A (en) | 2013-03-27 |
| CN102990501B (en) | 2016-11-23 |
| DE102011113167A1 (en) | 2013-03-14 |
| EP2572829A1 (en) | 2013-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2572829B1 (en) | Device and method for processing the surface of workpieces | |
| EP2983864B1 (en) | Method and device for the surface treatment of workpieces | |
| EP2161092B1 (en) | Gear grinder and method for dressing a grinding tool | |
| DE102012006502A1 (en) | Method for multistage grinding of workpieces, as well as vacuum table, storage container, stripping device and system for carrying out the method | |
| DE3010964C2 (en) | Method and device for emptying workpieces having cavities | |
| WO2012069169A2 (en) | Device for processing the surface of workpieces, in particular a drag-finishing machine | |
| DE102011015750A1 (en) | Method for processing e.g. sharpening and polishing, of surface of workpiece, involves pivoting workpiece around two axes during surface treatment to change incident angle of granules and to provide desired effect to surface of workpiece | |
| DE19804885C5 (en) | Superfinishing device | |
| DE112015002319T5 (en) | Planarization processing method and planarization processing apparatus | |
| DE102012025233B4 (en) | Towing and / or dip finishing machine for surface treatment of workpieces by means of grinding and / or polishing granules in the presence of a liquid processing medium | |
| DE216197T1 (en) | MILLING OR GRINDING MACHINE FOR FINISHING FLAT SURFACES MADE OF STONE, CONCRETE OR SIMILAR HARD MATERIAL. | |
| DE202012011789U1 (en) | Device for the surface treatment of workpieces | |
| DE102013006010A1 (en) | Method and device for the surface treatment of workpieces | |
| DE102010049919B4 (en) | Method and device for surface treatment of through holes having workpieces | |
| EP0054214B1 (en) | Method of dressing grinding wheels and device therefor | |
| CH671912A5 (en) | ||
| DE3719980A1 (en) | Repairing of hydraulic cylinders for support shields | |
| EP2986415B1 (en) | Device and method for processing, in particular grinding, an optical workpiece | |
| CN112428033A (en) | Bearing grinding machine capable of automatically detecting deformation degree of grinding wheel | |
| DE102021107857A1 (en) | Process and device for local surface treatment of workpieces | |
| WO2016058575A1 (en) | Centerless grinding machine and method for the use of a centerless grinding machine | |
| DE4423376A1 (en) | Motorised vehicle for spraying of plane, curved and structured surfaces | |
| EP0131141B1 (en) | Finishing with a dragging movement, and device for carrying it out | |
| DE2805429A1 (en) | Ceramic material layer removal machine - has ultrasonic tool with return mechanism on guide parallel to that for work holder | |
| DE2829788A1 (en) | GRINDING MACHINE |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20130522 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20130813 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 641307 Country of ref document: AT Kind code of ref document: T Effective date: 20131215 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502012000213 Country of ref document: DE Effective date: 20140116 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20131120 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140320 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140220 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140320 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502012000213 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 |
|
| 26N | No opposition filed |
Effective date: 20140821 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502012000213 Country of ref document: DE Effective date: 20140821 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140817 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140817 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150831 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140221 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20120817 Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140831 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20160817 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160817 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 641307 Country of ref document: AT Kind code of ref document: T Effective date: 20170817 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131120 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170817 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20190830 Year of fee payment: 8 Ref country code: TR Payment date: 20190805 Year of fee payment: 8 Ref country code: IT Payment date: 20190821 Year of fee payment: 8 Ref country code: DE Payment date: 20190821 Year of fee payment: 8 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502012000213 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200831 Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200817 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200817 |