EP2514706A1 - Hebezeug und Verfahren zum Betreiben des Hebezeugs - Google Patents
Hebezeug und Verfahren zum Betreiben des Hebezeugs Download PDFInfo
- Publication number
- EP2514706A1 EP2514706A1 EP12164604A EP12164604A EP2514706A1 EP 2514706 A1 EP2514706 A1 EP 2514706A1 EP 12164604 A EP12164604 A EP 12164604A EP 12164604 A EP12164604 A EP 12164604A EP 2514706 A1 EP2514706 A1 EP 2514706A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- hoist
- movement
- load
- force
- weight
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/22—Control systems or devices for electric drives
- B66C13/23—Circuits for controlling the lowering of the load
- B66C13/26—Circuits for controlling the lowering of the load by ac motors
- B66C13/28—Circuits for controlling the lowering of the load by ac motors utilising regenerative braking for controlling descent of heavy loads and having means for preventing rotation of motor in the hoisting direction when load is released
Definitions
- the present invention relates to a hoist and to a method of operating the hoist which converts and provides the kinetic energy released by movement of an element of the hoist to electrical energy.
- Mass savings to reduce wheel loads, cost savings in crane rail dimensioning or increasing the load capacity with constant wheel loads are reasons for the use of replacement systems that store energy in another way or make available in a converted form the process again.
- the invention is therefore an object of the invention to provide a hoist and a method for operating the hoist with which in a simple, cost-effective, reliable and efficient manner in the operation of the hoist kinetic energy is converted into electrical energy and available adjustable.
- the hoist according to the invention is designed as a transmission such that at least one gear member on the hoist due to at least a portion of the dead weight and the weight of the load performs a movement, wherein the hoist has a device for energy recuperation, with which the kinetic energy in the movement in electrical energy is convertible.
- the device comprises for energy recuperation a generator and a rope winch with rope, which is attached to a moving gear member, the generator is mechanically coupled to the winch such that rotational energy generated by the running of the winch rope on the winch, From the generator into electrical energy is convertible.
- the recuperation is understood to mean an energy recirculation or conversion.
- the pro rata weight of the hoist is, depending on the design of the gear designed as hoist, the weight of the moving gear member to which the load depends, and / or of which are connected to the moving gear member and also moving gear members. Due to the geometry of the gear members, the hoist according to the invention takes on a specific movement, at least theoretically, automatically, and thus without supply of energy, into a different position when the load is attached. In reality, however, to realize sufficient acceleration of the gear members and the load, at least some energy is required to move the gear members.
- the hoist Due to the fact that the hoist automatically carries out a movement with the load attached due to the self-weight force and the weight of the load, and the rope is connected to a moving gear member, the rope is unrolled from the winch.
- the winch drives the generator, which converts the rotational energy of the winch into electrical energy.
- the kinetic energy of the movement of the hoist or at least one of its transmission members can be converted into electrical energy and made available.
- the hoist comprises a braking device for fixing the gear members in a position prior to execution of the automatic movement, wherein this automatic movement is made possible by an opening of the brake.
- the advantage of the invention lies in particular in the increase of the efficiency during operation of the hoist by the utilization or conversion of the kinetic energy. There are thus in contrast to the conventional systems that are equipped for recuperation, no heavy moving masses as energy storage necessary.
- the available electrical energy can be used in many ways, for example when operating other units of the hoist or fed into the network.
- the hoist according to the invention is a crane and in particular a double jib crane, but also single-jaw cranes should not be excluded from the invention.
- the gear underlying the hoist is a rocker arm with four hinges, comprising a so-called pressure arm, a boom and a pull rod, which are relatively movable to a stand.
- the self-weight force is thus determined by the structural design of the moving gear members of the rocker arm.
- the hoist is designed as a crane and in particular as a double articulated crane, it is preferably provided that the movement carried out on the basis of the dead load force and the weight force of the load is a movement of a plurality of gear members of the double articulated crane which results in a change in the outreach. Under the unloading here is the distance between the load and the stand of the crane to understand.
- the movement taking place for example, after the brakes have been opened may result in an increase or a reduction in the radius of the projection, so that the hoist throws or tilts.
- This property of the hoist to move in a particular direction depends primarily on the geometry of the rocker arm and also on the magnitude of the dead weight of the gear members and the load attached.
- the hoist has a torque generating device which is mechanically coupled to the winch such that on the winch a torque can be generated, with which on the rope a force which from the weight of the gear members of the hoist and / or the appended load results, at least partially compensated.
- the torque-generating device should preferably be a motor connected to the winch.
- the torque generating device generates on the winch a torque which is converted by the winch in a tensile force in the rope.
- This tensile force in the cable causes by its point of application to a gear member a moment with which a moment that results from the weight of the gear members of the hoist and / or the suspended load in connection with the respective projection, at least partially compensated.
- the generator for producing the electrical energy can be used at the same time in reversing its function as a motor for torque generation.
- the hoist according to the invention is equipped with a path-measuring device with which the respective projection can be determined.
- Reference values, which determine which torque is to be generated by the torque generating device on the cable winch, in a data storage device likewise encompassed by the hoist, can be used to determine the required holding torque for compensating the force, which can be determined from the own weight, depending on the respective load and the respective projection the gear members of the hoist and / or the attached load, provide. It can be generated while a torque with which the force is fully compensated.
- the advantage of the embodiment according to the invention is that a further drive unit for moving the gear members opposite to the movement that would take place on the hoist due to the dead weight and the weight of the load, with less power and less material / manufacturing effort is feasible because with this drive unit not the force resulting from the self-weight force of the gear members and the load must be absorbed.
- a method of operating a hoist wherein upon movement of at least one transmission member of the hoist, which load on the hoist executes a movement due to at least a portion of the dead weight and the weight of the load, for energy recuperation during movement resulting kinetic energy is converted into electrical energy, wherein the hoist is a crane, and the movement carried out due to at least a portion of the dead weight and the weight of the load is a movement of several gear members of the crane, which results in a change of the discharge.
- a device for energy recuperation rotational energy, which is generated by a running of a winch and connected to a moving gear member rope on the winch, converted by a generator into electrical energy.
- the inventive method is adapted to operate a hoist according to the invention.
- the advantage of the method according to the invention lies in the increase of the efficiency by utilizing the kinetic energy of the gear member or the gear members as well as the avoidance of the use of position memory large mass.
- the crane may in particular be a double-articulated crane.
- the movement performed due to the self-weight force and the weight of the load is a movement of a plurality of gear members of the double-jointed crane, resulting in a change in the overhang.
- This change in the overhang can, as mentioned above, be an increase or a decrease in the overhang.
- the movement can be triggered by opening of brakes.
- the kinetic energy of the moving gear member is first transmitted via the rope also kinetic energy of the winch and this kinetic energy or rotational energy is in turn converted into electrical energy and made available.
- the generated electrical energy can be fed into a network and / or made available to at least one electromotive drive unit of the hoist.
- the advantage of this embodiment is in particular that no storage of the energy generated is made, whereby the Wrkungsgrad of the hoist and the method for operating the hoist improves.
- the generated electrical energy can be used universally. Alternatively or additionally, it is possible to store the generated electrical energy at least partially or to use it to operate other units, such as for controlling or cooling the hoist.
- the torque-generating device is operated during the change of the discharge of the hoist in a torque control.
- This means that the torque is automatically set, which is specified by stored torque curves. From these torque curves the torque to be set in accordance with the degree of the respective projection and the associated center of gravity displacement is given and the load to adjust the torque on the winch in any position of the load by means of the torque generating device, with which from the own weight and The load resulting force can be absorbed. In this way, the net mass of the linkage system, which also includes the mass of the attached load, can be compensated at each operating point.
- the torque generating device which should preferably be a motor, be operated in the so-called speed control, with only a certain speed is set, such as a gear member such as the pull or the push arm, in a mounting position about a hinge to be able to swing up.
- the method for operating the hoist is advantageously designed when a force for generating a movement of a gear member, which is carried out against the movement, which is due to at least a proportion of the dead weight and the weight of the load, is applied by means of a translationally acting drive.
- a rack-and-pinion drive can be used.
- the movement that takes place due to at least a portion of the dead weight force and the weight force of the load can, for example, be a movement that results in an increase in the overhang.
- the opposite movement is thus a movement that results in a reduction of the projection.
- multi-motor boom pullers can be provided, that is, a plurality of rack and pinion drives or a plurality of translationally acting drives.
- the method for operating a hoist is then designed in a favorable manner when the force for generating a movement of a gear member for changing the discharge and the force for generating the torque to compensate for the self-weight of the gear members of the hoist and / or the attached load Force is detected in a monitoring and / or control unit, and the monitoring and / or control unit controls the method for operating the hoist such that opposite effects of the forces are excluded.
- the monitoring and / or control unit detects force for generating the torque to compensate for the self-weight of the gear members of the hoist and / or the attached load, which is applied to the winch becomes.
- the monitoring and / or regulating unit regulates the method such that the forces do not act against each other, so that, for example, when the translatory drive is extended for the purpose of extracting from the cable winch, no moment is applied which would cause a rocking action.
- the detected force values can be detected in a data memory and, if appropriate as a function of the respective projection and the lever arm realized therewith, be compared with one another by the monitoring and / or regulating unit.
- the force for generating a movement of a transmission member for changing the discharge by the common monitoring and / or control unit according to the power requirement is further minimized by overcompensation or undercompensation of the own weight of the gear members of the hoist and / or attached load resulting force.
- the advantage lies in the improvement of the energy balance by minimizing or avoiding motor power requirements. At the same time, if necessary, a controllable overcompensation or undercompensation of the torque generating device is made possible.
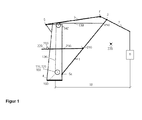
- This hoist comprises a push rod 1, a boom 2, a pull rod 3 and a stand 4.
- the push rod 1 is articulated on the stand 4 below.
- the pull rod 3 is articulated at the top of the stand 4.
- the push rod 1 is pivotally connected to the pull rod 3 via the boom 2.
- the boom 2 protrudes beyond the coupling point with the pressure arm 1 addition.
- the load 6 is arranged hanging.
- the connections between the pressure arm 1 and the stator 4, between the pressure arm 1 and the boom 2, between the boom 2 and the pull rod 3 and between the tension arm 3 and the stator 4 are designed as hinges 5. As a result, a rocker arm with four hinges is formed.
- This energy recuperation device 100 comprises a winch 120 on which the rope 130 is rolled up with a section.
- Mechanically coupled to the cable winch 120 is a generator 110 which, for reasons of clarity, is not shown separately.
- a rack engagement point 210 engages on the push rod 1 a rack and pinion 200.
- a rack drive 220 mounted on the stand 4 acts on a toothed rack 230 of the rack and pinion drive 200, which in turn exerts a tensile or compressive force on the pressure control arm 1. That is, by operating the rack and pinion drive 200, the angle of the push arm 1 can be varied so that the projection 10 between the upright 4 and the suspended load 6 can be varied.
- the boom 2 moves at an attached load 6, at least theoretically without supply of additional energy either in a direction in which the projection 10 is reduced or in a direction in which the projection 10 increases. This movement can be triggered, for example, by the solution of braking devices.
- the pressure arm 1 pivots winkelver mecanicrnd around the base point 5a, so that the cable 130 runs from the winch 120.
- the rotational energy of the winch 120 is thereby converted by the generator not shown in electrical energy.
- This electrical energy can be fed into a network and / or drive units of the hoist or secondary equipment can be provided.
- the toothed rack drive 220 used as a translatory drive is actuated, which acts on the toothed rack 230, so that it pivots the pressure arm 1 angle-reducing around the foot point 5a by introducing a tensile force.
- a force which is composed of the proportionate dead weight of the Drucklenkers1, the boom 2 and the trailing arm 3 and the suspended load 6 is compensated by the device for energy recuperation 100 by a winch on the winch 120 torque generating device 160th is arranged, which adjusts such a torque that the said force is compensated.
- the force is dependent on the size of the respective weight forces as well as the size of the mass value of the suspended load 6.
- the resulting center of gravity 300 is approximately the point at which the resulting weight forces are applied.
- the position of the resulting center of gravity 300 also changes. This also changes a moment caused by the force which is to be compensated.
- the hoist advantageously comprises a data memory in which data storage sets, if necessary in the form of torque curves are deposited, depending on the respectively attached load 6 and the respective projection 10 a specific value for the torque to be set on the winch 120 pretend.
- the torque generating device need not necessarily be arranged next to the generator for generating the electrical energy, but the generator and the torque generating device 160 may be formed by an aggregate, which allows in its function the generator operation as well as the engine operation.
- the device for energy recuperation has the advantage that with her or individual units, the weight of the movable gear members and the attached load 6 is compensated, so that with a translational drive, such as a rack and pinion 200, only such a force or a such torque must be applied, which serves to change the projection 10 and thus to transport the load 6 in a substantially horizontal direction. In the opposite direction of the transport of the load 6 runs almost automatically and using the released kinetic energy.
Abstract
Description
- Die vorliegende Erfindung betrifft ein Hebezeug sowie ein Verfahren zum Betreiben des Hebezeuges, mit denen die kinetische Energie, die bei der Bewegung eines Elementes des Hebezeuges freigesetzt wird, in elektrische Energie umgewandelt und zur Verfügung gestellt wird.
- Bei Kränen und insbesondere bei Hafendrehkränen sind Ausgleichssysteme zur Kompensation der Eigenmasse des so genannten Lenkersystems des Krans hinlänglich bekannt. Diese Ausgleichssysteme bewirken eine verbesserte Kraftverteilung sowie eine höhere Energieeffizienz beim Betreiben des Krans. Insbesondere Speicher für potentielle Energien werden in unterschiedlichsten Ausführungsformen seit langer Zeit verwendet. Wenn vergleichsweise hohe Masse des Gesamtsystems für den Einsatzfall tolerierbar sind, haben diese Speicher weiterhin ihre Berechtigung.
- Masseeinsparung zur Verringerung von Radlasten, Kosteneinsparung bei der Kranbahndimensionierung oder Erhöhung der Traglast bei gleichbleibenden Radlasten sind Gründe für den Einsatz von Ersatzsystemen, die Energie auf andere Art speichern oder in gewandelter Form dem Prozess wieder zur Verfügung stellen.
- Demzufolge wurden weitere Energiespeicher, wie zum Beispiel Druckgasspeicher, Ladungsspeicher oder Einrichtungen zur Speicherung kinetischer Energie in Form von Schwungmassen, entwickelt.
- Aus der
DE 10 2006 022 010 A1 ist eine Einrichtung zum Eigenmasseausgleich des Auslegersystems von Drehkränen bekannt, bei dem die Kraft der Eigenmasse des Auslegersystems durch eine Kraft, die von einem Hydraulikspeicher generiert wird, teilweise ausgeglichen wird. Zwar lässt sich das Auslegersystem bzw. der Kran ohne schwergewichtige Ausgleichmassen ausführen jedoch ist der konstruktive Aufwand sowie der Wartungsaufwand relativ groß. Zudem kann die gespeicherte Energie lediglich zur Unterstützung der Bewegung dieses Getriebegliedes des Krans verwendet werden. Außerdem ist aufgrund der Umwandlung der kinetischen Energie in Druckenergie der Gesamtwirkungsgrad relativ gering. - Der Erfindung liegt somit die Aufgabe zugrunde, ein Hebezeug sowie ein Verfahren zum Betreiben des Hebezeuges zur Verfügung zu stellen, mit denen in einfacher, kostengünstiger, zuverlässiger und effizienter Weise beim Betrieb des Hebezeugs kinetische Energie in elektrische Energie umwandelbar und zur Verfügung stellbar ist.
- Diese Aufgabe wird durch das erfindungsgemäße Hebezeug nach Anspruch 1 sowie durch das erfindungsgemäße Verfahren zum Betreiben eines Hebezeuges nach Anspruch 6 gelöst. Vorteilhafte Ausgestaltungen des erfindungsgemäßen Hebezeuges sind in den Unteransprüchen 2 bis 5 angegeben. Vorteilhafte Ausgestaltungen des Verfahrens zum Betreiben eines Hebezeuges sind in den Unteransprüchen 7 bis 13 angegeben.
- Das erfindungsgemäße Hebezeug ist als ein Getriebe derart eingerichtet, dass wenigstens ein Getriebeglied am Hebezeug aufgrund zumindest eines Anteils der Eigengewichtskraft und der Gewichtskraft der Last eine Bewegung ausführt, wobei das Hebezeug eine Einrichtung zur Energierekuperation aufweist, mit der die bei der Bewegung anfallende kinetische Energie in elektrische Energie umwandelbar ist. Die Einrichtung umfasst zur Energierekuperation einen Generator sowie eine Seilwinde mit Seil, welches an einem sich bewegenden Getriebeglied befestigt ist, wobei der Generator mit der Seilwinde mechanisch derart gekoppelt ist, dass Rotationsenergie, die von dem von der Seilwinde ablaufenden Seil an der Seilwinde erzeugt wird, vom Generator in elektrische Energie umwandelbar ist.
- Unter der Rekuperation wird eine Energierückführung bzw. -umwandlung verstanden. Das anteilige Eigengewicht des Hebezeuges ist, je nach Ausführung des als Getriebe ausgebildeten Hebezeuges, die Gewichtskraft des sich bewegenden Getriebegliedes, an dem die Last hängt, und/oder der von denen sich am bewegenden Getriebeglied angeschlossenen und sich ebenfalls bewegenden Getriebeglieder. Das erfindungsgemäße Hebezeug nimmt bei anhängender Last in einer bestimmten Position auf Grund der Geometrie der Getriebeglieder zumindest theoretisch selbsttätig und somit ohne Zuführung von Energie eine bestimmte Bewegung in eine andere Position vor. In der Realität ist jedoch zur Realisierung einer ausreichenden Beschleunigung der Getriebeglieder und der Last wenigstens geringfügig Energie zur Bewegung der Getriebeglieder aufzubringen.
- Aufgrund dessen, dass das Hebezeug bei anhängender Last aufgrund der Eigengewichtskraft und der Gewichtskraft der Last selbsttätig eine Bewegung ausführt, und das Seil an einem sich bewegenden Getriebeglied angeschlossen ist, wird das Seil von der Seilwinde abgerollt. Die Seilwinde treibt dabei den Generator an, der die Rotationsenergie der Seilwinde in elektrische Energie umwandelt. Dadurch lässt sich die kinetische Energie der Bewegung des Hebezeuges bzw. wenigstens eines seiner Getriebeglieder in elektrische Energie umwandeln und zur Verfügung stellen.
- Vorzugsweise umfasst das Hebezeug eine Bremseinrichtung zur Fixierung der Getriebeglieder in einer Position vor Ausführung der selbsttätigen Bewegung, wobei diese selbsttätige Bewegung durch eine Öffnung der Bremse ermöglicht wird.
- Der Vorteil der Erfindung liegt insbesondere in der Erhöhung des Wirkungsgrades bei Betrieb des Hebezeuges durch die Ausnutzung bzw. Umwandlung der kinetischen Energie. Es sind somit im Gegensatz zu den herkömmlichen Anlagen, die zur Rekuperation ausgerüstet sind, keine schweren bewegten Massen als Energiespeicher notwendig. Die zur Verfügung gestellte elektrische Energie kann in vielfältiger Weise, zum Beispiel beim Betrieb anderer Aggregate des Hebezeuges genutzt oder ins Netz eingespeist werden.
- Vorzugsweise ist vorgesehen, dass das erfindungsgemäße Hebezeug ein Kran und insbesondere ein Doppellenkerkran ist, wobei jedoch auch Einlenkerkräne nicht von der Erfindung ausgeschlossen sein sollen. Beim Doppellenkerkran ist das dem Hebezeug zugrunde liegende Getriebe eine Kurbelschwinge mit vier Drehgelenken, umfassend einen so genannten Drucklenker, einen Ausleger sowie einen Zuglenker, die zu einem Ständer relativ beweglich sind. Die Eigengewichtskraft wird somit durch die konstruktive Ausbildung der sich bewegenden Getriebeglieder der Kurbelschwinge bestimmt.
- Bei Ausführung des Hebezeuges als Kran und insbesondere als Doppellenkerkran ist vorzugweise vorgesehen, dass die aufgrund der Eigengewichtskraft und der Gewichtskraft der Last ausgeführte Bewegung eine Bewegung mehrerer Getriebeglieder des Doppellenkerkrans ist, die eine Änderung der Ausladung zur Folge hat. Unter der Ausladung ist hierbei der Abstand zwischen der Last und dem Ständer des Kranes zu verstehen.
- Dabei kann die zum Beispiel nach Öffnen der Bremsen erfolgende Bewegung eine Vergrößerung oder eine Verringerung der Ausladung zur Folge haben, so dass das Hebezeug auswippt oder einwippt. Diese Eigenschaft des Hebezeuges, in eine bestimmte Richtung eine Bewegung auszuführen, ist in erster Linie von der Geometrie der Kurbelschwinge abhängig und außerdem von der Größe der Eigengewichtskraft der Getriebeglieder sowie der anhängenden Last.
- In einer weiteren vorteilhaften Ausgestaltung ist vorgesehen, dass das Hebezeug eine Drehmomenterzeugungseinrichtung aufweist, die mechanisch mit der Seilwinde derart gekoppelt ist, dass an der Seilwinde ein Drehmoment erzeugbar ist, mit welchem über das Seil eine Kraft, welche aus dem Eigengewicht der Getriebeglieder des Hebezeuges und/oder der anhängenden Last resultiert, zumindest anteilig kompensierbar ist. Damit kann in jedem Arbeitspunkt, also bei unterschiedlicher Ausladung, die Kraft, welche eine Funktion der anhängenden Last und der Eigengewichte der Getriebeglieder ist, vollständig kompensiert werden. Die Drehmomenterzeugungseinrichtung sollte vorzugsweise ein Motor sein, der an die Seilwinde angeschlossen ist.
- Die Drehmomenterzeugungseinrichtung erzeugt an der Seilwinde ein Drehmoment, welches durch die Seilwinde in eine Zugkraft im Seil umgesetzt wird. Diese Zugkraft im Seil bewirkt durch seinen Angriffspunkt an einem Getriebeglied ein Moment, mit welchem ein Moment, das aus dem Eigengewicht der Getriebeglieder des Hebezeuges und/oder der anhängenden Last in Zusammenhang mit der jeweiligen Ausladung resultiert, zumindest teilweise kompensiert wird.
- Vorteilhafterweise kann der Generator zur Herstellung der elektrischen Energie gleichzeitig bei Umkehrung seiner Funktion als Motor zur Drehmomenterzeugung eingesetzt werden.
- In vorteilhafter Weise ist das erfindungsgemäße Hebezeug mit einer Weg-Mess-Einrichtung ausgerüstet, mit der die jeweilige Ausladung bestimmbar ist. In einem ebenfalls vom Hebezeug umfassten Datenspeicher können Referenzwerte hinterlegt sein, die bestimmen, welches Drehmoment durch die Drehmomenterzeugungseinrichtung an der Seilwinde zu erzeugen ist, um in Abhängigkeit von der jeweiligen Last und der jeweiligen Ausladung das erforderliche Haltemoment zur Kompensation der Kraft, welche aus dem Eigengewicht der Getriebeglieder des Hebezeuges und/oder der anhängenden Last resultiert, bereitzustellen. Es kann dabei ein Drehmoment erzeugt werden, mit dem die Kraft vollständig kompensierbar ist. In einer alternativen Ausführungsform ist es auch möglich, bei Anordnung weiterer Halte- bzw. Antriebseinrichtungen nur eine teilweise Kompensation mittels der Drehmomenterzeugungseinrichtung vorzunehmen.
- Der Vorteil der erfindungsgemäßen Ausgestaltung liegt darin, dass eine weitere Antriebseinheit zur Bewegung der Getriebeglieder entgegengesetzt zu der Bewegung, die am Hebezeug aufgrund der Eigengewichtskraft und der Gewichtskraft der Last erfolgen würde, mit geringerer Leistung und geringerem Material/Herstellungsaufwand ausführbar ist, da mit dieser Antriebseinheit nicht die Kraft, welche aus der Eigengewichtskraft der Getriebeglieder und der Last resultiert, aufgenommen werden muss.
- Erfindungsgemäß wird außerdem ein Verfahren zum Betreiben eines Hebezeuges zur Verfügung gestellt, bei dem bei der Bewegung wenigstens eines Getriebegliedes des Hebezeuges, welches am Hebezeug anhängender Last aufgrund zumindest eines Anteils der Eigengewichtskraft und der Gewichtskraft der Last eine Bewegung ausführt, zur Energierekuperation die bei der Bewegung anfallende kinetische Energie in elektrische Energie umgewandelt wird, wobei das Hebezeug ein Kran ist, und die aufgrund zumindest eines Anteils der Eigengewichtskraft und der Gewichtskraft der Last ausgeführte Bewegung eine Bewegung mehrerer Getriebeglieder des Krans ist, die eine Änderung der Ausladung zur Folge hat. Mittels einer Einrichtung zur Energierekuperation wird Rotationsenergie, die von einem von einer Seilwinde ablaufendem und an einem bewegten Getriebeglied angeschlossenen Seil an der Seilwinde erzeugt wird, von einem Generator in elektrische Energie umgewandelt.
- Demzufolge ist das erfindungsgemäße Verfahren dazu eingerichtet, ein erfindungsgemäßes Hebezeug zu betreiben. Der Vorteil des erfindungsgemäßen Verfahrens liegt in der Erhöhung des Wirkungsgrades durch Ausnutzung der kinetischen Energie des Getriebegliedes bzw. der Getriebeglieder sowie der Vermeidung des Einsatzes von Lagespeichern großer Masse.
- Der Kran kann insbesondere ein Doppellenkerkran sein. Die aufgrund der Eigengewichtskraft und der Gewichtskraft der Last ausgeführte Bewegung ist eine Bewegung mehrerer Getriebeglieder des Doppellenkerkrans, die eine Änderung der Ausladung zur Folge hat. Diese Änderung der Ausladung kann, wie oben bereits erwähnt, eine Vergrößerung oder eine Verringerung der Ausladung sein. Dabei kann die Bewegung durch Öffnung von Bremsen ausgelöst werden.
- Die kinetische Energie des bewegten Getriebegliedes wird zunächst über das Seil ebenfalls kinetische Energie der Seilwinde übertragen und diese kinetische Energie bzw. Rotationsenergie wird wiederum in elektrische Energie umgewandelt und zur Verfügung gestellt.
- Die erzeugte elektrische Energie kann in ein Netz eingespeist werden und/oder wenigstens einer elektromotorischen Antriebseinheit des Hebezeuges zur Verfügung gestellt werden. Der Vorteil dieser Ausgestaltung liegt insbesondere darin, dass keine Speicherung der erzeugten Energie vorgenommen wird, wodurch sich der Wrkungsgrad des Hebezeuges sowie des Verfahrens zum Betreiben des Hebezeuges verbessert. Die erzeugte elektrische Energie ist universell einsetzbar. Alternativ oder hinzukommend ist es möglich, die erzeugte elektrische Energie zumindest anteilig zu speichern oder zum Betrieb anderer Aggregate, wie zum Beispiel zur Steuerung oder Kühlung des Hebezeuges zu nutzen.
- Zur Kompensation des Eigengewichtes der Getriebeglieder des Hebezeuges und/oder der anhängenden Last ist vorgesehen, dass mittels einer mechanisch mit der Seilwinde gekoppelten Drehmomenterzeugungseinrichtung an der Seilwinde ein Drehmoment erzeugt wird, welches der vom Eigengewicht der Getriebeglieder und/oder der Last bewirkten Kraft entgegenwirkt.
- Es ist dabei vorzugsweise vorgesehen, dass die Drehmomenterzeugungseinrichtung während der Änderung der Ausladung des Hebezeuges in einer Momentenregelung betrieben wird. Das heißt, dass automatisch das Drehmoment eingestellt wird, welches durch gespeicherte Momentenkurven vorgegeben wird. Aus diesen Momentenkurven ist das einzustellende Drehmoment in Abhängigkeit von dem Maß der jeweiligen Ausladung und der damit verbundenen Schwerpunktsverschiebung vorgegeben sowie der Last, um in jeder Position der Last mittels der Drehmomenterzeugungseinrichtung das Moment an der Seilwinde einstellen zu können, mit dem die aus dem Eigengewicht sowie der Last resultierende Kraft aufgenommen werden kann. Derart kann die Eigenmasse des Lenkersystems, in dem ebenfalls die Masse der anhängenden Last enthalten ist, in jedem Arbeitspunkt kompensiert werden.
- Zu Montagezwecken kann die Drehmomenterzeugungseinrichtung, die vorzugsweise ein Motor sein sollte, in der so genannten Regelungsart Drehzahlenregelung betrieben werden, wobei lediglich eine bestimmte Drehzahl eingestellt wird, etwa um ein Getriebeglied, wie beispielsweise den Zug- oder den Drucklenker, in eine Montageposition um ein Gelenk hochschwenken zu können.
- Das Verfahren zum Betreiben des Hebezeuges ist dann vorteilhaft ausgestaltet, wenn eine Kraft zur Erzeugung einer Bewegung eines Getriebegliedes, die entgegen der Bewegung ausgeführt wird, die aufgrund zumindest eines Anteils der Eigengewichtskraft und der Gewichtskraft der Last erfolgt, mittels eines translatorisch wirkenden Antriebs aufgebracht wird. Insbesondere kann dabei ein Zahnstangentrieb Verwendung finden Die Bewegung, die aufgrund zumindest eines Anteils der Eigengewichtskraft und der Gewichtskraft der Last erfolgt, kann zum Beispiel eine Bewegung sein, die eine Vergrößerung der Ausladung zur Folge hat. Die entgegengesetzte Bewegung ist somit eine Bewegung, die eine Verringerung der Ausladung zur Folge hat. Zur Realisierung dieser Bewegung muss dem Getriebe Energie zugeführt werden, wozu der Zahnstangentrieb dient. Gegebenenfalls können auch Mehrmotorenauslegereinziehwerke vorgesehen sein, das heißt, mehrere Zahnstangentriebe bzw. mehrere translatorisch wirkende Antriebe.
- Das Verfahren zum Betreiben eines Hebezeuges ist dann in günstiger Weise ausgestaltet, wenn die Kraft zur Erzeugung einer Bewegung eines Getriebegliedes zur Änderung der Ausladung sowie die Kraft zur Erzeugung des Drehmomentes zur Kompensation der aus dem Eigengewicht der Getriebeglieder des Hebezeuges und/ oder der anhängenden Last resultierenden Kraft in einer Überwachungs- und/oder Regeleinheit erfasst wird, und die Überwachungs- und/oder Regeleinheit das Verfahren zum Betreiben des Hebezeuges derart steuert, dass entgegengesetzte Wirkungen der Kräfte ausgeschlossen sind.
- Das heißt, dass durch die vom Hebezeug umfassten Überwachungs- und/oder Regeleinheit die durch den translatorischen Antrieb aufgebrachte Kraft erfasst wird, welche selbst bei theoretisch selbsttätig ablaufenden Bewegungen notwendig ist, um eine ausreichende Beschleunigung zu realisieren.
- Außerdem erfasst die Überwachungs- und/oder Regeleinheit Kraft zur Erzeugung des Drehmomentes zur Kompensation der aus dem Eigengewicht der Getriebeglieder des Hebezeuges und/oder der anhängenden Last, welche an der Seilwinde aufgebracht wird. Die Überwachungs- und/oder Regeleinheit regelt das Verfahren derart, dass die Kräfte nicht gegeneinander wirken, so dass zum Beispiel bei einem Ausfahren des translatorischen Antriebs zwecks Auswippen an der Seilwinde kein Moment aufgebracht wird, welches ein Einwippen bewirken würde. Dabei können die erfassten Kraftwerte in einem Datenspeicher erfasst werden und, gegebenenfalls in Abhängigkeit von der jeweiligen Ausladung und des damit realisierten Hebelarmes, durch die Überwachungs- und/oder Regeleinheit miteinander verglichen werden.
- Insbesondere kann vorgesehen sein, dass die Kraft zur Erzeugung einer Bewegung eines Getriebegliedes zur Änderung der Ausladung durch die gemeinsame Überwachungs- und/oder Regeleinheit entsprechend der Leistungsanforderung weiter minimiert wird durch Über- oder Unterkompensation der aus dem Eigengewicht der Getriebeglieder des Hebezeuges und/ oder der anhängenden Last resultierenden Kraft.
- Der Vorteil liegt in der Verbesserung der Energiebilanz durch Minimierung beziehungsweise Vermeidung von motorischem Leistungsbedarf. Gleichzeitig wird dadurch im Bedarfsfall eine regelbare Über- oder Unterkompensation der Drehmomenterzeugungseinrichtung ermöglicht.
- Die Erfindung wird im Folgenden anhand der beiliegenden Zeichnung erläutert.
- Es zeigt die einzige Figur in schematischer Ansicht ein erfindungsgemäßes Hebezeug in Ansicht von der Seite.
- Dieses Hebezeug umfasst einen Drucklenker 1, einen Ausleger 2, einen Zuglenker 3 sowie einen Ständer 4. Der Drucklenker 1 ist am Ständer 4 unten gelenkig angeordnet. Der Zuglenker 3 ist oben am Ständer 4 gelenkig angeordnet. Der Drucklenker 1 ist mit dem Zuglenker 3 über den Ausleger 2 gelenkig verbunden. Der Ausleger 2 ragt dabei jedoch über die Koppelstelle mit dem Drucklenker 1 hinaus. Am Ende des Auslegers 2 ist hängend die Last 6 angeordnet. Die Verbindungen zwischen dem Drucklenker 1 und dem Ständer 4, zwischen dem Drucklenker 1 und dem Ausleger 2, zwischen dem Ausleger 2 und dem Zuglenker 3 sowie zwischen dem Zuglenker 3 und dem Ständer 4 sind als Drehgelenke 5 ausgestaltet. Dadurch wird eine Kurbelschwinge mit vier Drehgelenken ausgebildet. Am Drucklenker 1 greift in einem Seil-Angriffspunkt 150 ein Seil 130 an, welches über eine Umlenkrolle 140 zur Einrichtung zur Energierekuperation 100 verläuft. Diese Einrichtung zur Energierekuperation 100 umfasst eine Seilwinde 120, auf der das Seil 130 mit einem Abschnitt aufgerollt ist. Mit der Seilwinde 120 mechanisch gekoppelt ist ein Generator 110, der aus Gründen der Übersichtlichkeit nicht extra dargestellt ist.
- In einem Zahnstangen-Angriffspunkt 210 greift am Drucklenker 1 ein Zahnstangentrieb 200 an. Ein am Ständer 4 befestigter Zahnstangenantrieb 220 wirkt auf eine Zahnstange 230 des Zahnstangentriebes 200, die wiederum eine Zug- oder Druckkraft auf den Drucklenker 1 ausübt. Das heißt, dass durch Betätigung des Zahnstangentriebes 200 der Winkel des Drucklenkers 1 variiert werden kann, so dass die Ausladung 10 zwischen dem Ständer 4 und der anhängenden Last 6, variiert werden kann.
- Je nach Abmaßen der einzelnen Getriebeglieder (Drucklenker 1, Ausleger 2, Zuglenker 3 und Ständer 4) bewegt sich der Ausleger 2 bei anhängender Last 6 zumindest theoretisch ohne Zuführung von weiterer Energie selbsttätig entweder in eine Richtung, bei der sich die Ausladung 10 verringert oder in eine Richtung, bei der sich die Ausladung 10 vergrößert. Diese Bewegung kann zum Beispiel durch Lösung von Bremseinrichtungen ausgelöst werden.
- Zur Erläuterung der Erfindung wird im Folgenden auf die Situation eingegangen, bei der sich die Ausladung 10 selbsttätig vergrößert.
- Bei Vergrößerung der Ausladung 10 schwenkt der Drucklenker 1 winkelvergrößernd um den Fußpunkt 5a, so dass das Seil 130 von der Seilwinde 120 abläuft. Die Rotationsenergie der Seilwinde 120 wird dabei von dem nicht extra dargestellten Generator in elektrische Energie umgewandelt.
- Das heißt, dass die kinetische Energie der Bewegung der Getriebeglieder Drucklenker 1, Ausleger 2 und Zuglenker 3 sowie der daran anhängenden Last 6 in Rotationsenergie der Seilwinde 120 und dort mittels des Generators 110 in elektrische Energie umgewandelt wird. Diese elektrische Energie kann in ein Netz eingespeist werden und/oder Antriebseinheiten des Hebezeuges oder Sekundäreinrichtungen zur Verfügung gestellt werden.
- Ist eine Verringerung der Ausladung 10 erforderlich, wird der als translatorisch wirkende Antrieb eingesetzte Zahnstangenantrieb 220 betätigt, der auf die Zahnstange 230 wirkt, so dass diese unter Einleitung einer Zugkraft den Drucklenker 1 winkelverringernd um den Fußpunkt 5a schwenkt.
- Zur effizienten Kräfteverteilung ist vorgesehen, dass eine Kraft, welche sich aus der anteiligen Eigengewichtskraft des Drucklenkers1, des Auslegers 2 sowie des Zuglenkers 3 und der anhängenden Last 6 zusammensetzt, durch die Einrichtung zur Energierekuperation 100 kompensiert wird, indem an der Seilwinde 120 eine Drehmomenterzeugungseinrichtung 160 angeordnet ist, die ein derartiges Drehmoment einstellt, dass die erwähnte Kraft kompensiert wird. Es ist ersichtlich, dass die Kraft aus der Größe der jeweiligen Gewichtskräfte sowie der Größe des Massenwertes der anhängenden Last 6 abhängig ist. In der beiliegenden Figur ist mit dem resultierenden Schwerpunkt 300 in etwa der Punkt gezeigt, in dem die resultierenden Gewichtskräfte angreifen. Je nach Änderung der Ausladung 10 ändert sich selbstverständlich auch die Position des resultierenden Schwerpunktes 300. Dadurch ändert sich auch ein durch die Kraft bewirktes Moment, welche zu kompensieren ist. Um eine zuverlässige Kompensation zu erreichen, umfasst das Hebezeug vorteilhafterweise einen Datenspeicher, in dem Datenspeichersätze, gegebenenfalls in Form von Momentenkurven hinterlegt sind, die in Abhängigkeit von der jeweils anhängenden Last 6 sowie der jeweiligen Ausladung 10 einen bestimmten Wert für das einzustellende Drehmoment an der Seilwinde 120 vorgeben.
- Die Drehmomenterzeugungseinrichtung muss dabei nicht unbedingt neben dem Generator zur Erzeugung der elektrischen Energie angeordnet sein, sondern der Generator und die Drehmomenterzeugungseinrichtung 160 können durch ein Aggregat ausgebildet sein, welches in seiner Funktion den Generatorbetrieb sowie auch den Motorbetrieb ermöglicht.
- Mit dem erfindungsgemäßen Hebezeug sowie dem erfindungsgemäßen Verfahren zum Betreiben des Hebezeuges lässt sich somit in einfacher Weise kinetische Energie eines nach Öffnen der Bremsen ablaufenden Bewegungsverlaufes mittels einer Einrichtung zur Energierekuperation in elektrische Energie umwandeln und die erzeugte elektrische Energie wiederum kann zum Betrieb des Hebezeuges und/oder für andere Aggregate oder Funktionen zur Verfügung gestellt werden. Es entfällt somit eine verlustbehaftete Speicherung der Energie sowie die Notwendigkeit, das Hebezeug mit zusätzlichen großen Massen zu versehen. Dabei hat die Einrichtung zur Energierekuperation den Vorteil, dass mit ihr bzw. einzelnen Aggregaten das Eigengewicht der bewegbaren Getriebeglieder sowie der anhängenden Last 6 kompensierbar ist, so dass mit einem translatorischen Antrieb, wie zum Beispiel ein Zahnstangentrieb 200, lediglich eine solche Kraft bzw. ein solches Moment aufgebracht werden muss, welches der Veränderung der Ausladung 10 und somit zum Transport der Last 6 in einer im Wesentlichen waagerechten Richtung dient. In die entgegengesetzte Richtung verläuft der Transport der Last 6 nahezu selbsttätig und unter Nutzung der freigesetzten kinetischen Energie.
-
- 1
- Drucklenker
- 2
- Ausleger
- 3
- Zuglenker
- 4
- Ständer
- 5
- Drehgelenk
- 5a
- Fußpunkt
- 6
- Last
- 10
- Ausladung
- 100
- Einrichtung zur Energierekuperation
- 110
- Generator
- 120
- Seilwinde
- 130
- Seil
- 140
- Umlenkrolle
- 150
- Seil-Angriffspunkt
- 160
- Drehmomenterzeugungseinrichtung
- 200
- Zahnstangentrieb
- 210
- Zahnstangen-Angriffspunkt
- 220
- Zahnstangenantrieb
- 230
- Zahnstange
- 300
- resultierender Schwerpunkt
Claims (13)
- Hebezeug, welches als ein Getriebe derart eingerichtet ist, dass wenigstens ein Getriebeglied bei am Hebezeug anhängender Last aufgrund zumindest eines Anteils der Eigengewichtskraft und der Gewichtskraft der Last eine Bewegung ausführt, wobei das Hebezeug eine Einrichtung zur Energierekuperation aufweist, mit der die bei der Bewegung anfallende kinetische Energie in elektrische Energie umwandelbar ist,
dadurch gekennzeichnet, dass die Einrichtung zur Energierekuperation einen Generator sowie eine Seilwinde mit Seil umfasst, welches an einem sich bewegenden Getriebeglied befestigt ist, wobei der Generator mit der Seilwinde mechanisch derart gekoppelt ist, dass Rotationsenergie, die von dem von der Seilwinde ablaufenden Seil an der Seilwinde erzeugt wird, vom Generator in elektrische Energie umwandelbar ist. - Hebezeug nach Anspruch 1, dadurch gekennzeichnet, dass es ein Kran ist.
- Hebezeug nach Anspruch 2, dadurch gekennzeichnet, dass die aufgrund der Eigengewichtskraft und der Gewichtskraft der Last ausgeführte Bewegung eine Bewegung mehrerer Getriebeglieder des Krans ist, die eine Änderung der Ausladung zur Folge hat.
- Hebezeug nach Anspruch 3, dadurch gekennzeichnet, dass die Bewegungi) eine Vergrößerung der Ausladung zur Folge hat, oderii) eine Verringerung der Ausladung zur Folge hat.
- Hebezeug nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass das Hebezeug weiterhin eine Drehmomenterzeugungseinrichtung aufweist, die mechanisch mit der Seilwinde derart gekoppelt ist, dass an der Seilwinde ein Drehmoment erzeugbar ist, mit welchem über das Seil eine Kraft, welche aus dem Eigengewicht der Getriebeglieder des Hebezeuges und/oder der anhängenden Last resultiert, zumindest anteilig kompensierbar ist.
- Verfahren zum Betreiben eines Hebezeuges, bei dem bei Bewegung wenigstens eines Getriebegliedes des Hebezeuges, welches bei am Hebezeug anhängender Last auf Grund zumindest eines Anteils der Eigengewichtskraft und der Gewichtskraft der Last eine Bewegung ausführt, zur Energierekuperation die bei der Bewegung anfallende kinetische Energie in elektrische Energie umgewandelt wird,
wobei das Hebezeug ein Kran ist, und die aufgrund zumindest eines Anteils der Eigengewichtskraft und der Gewichtskraft der Last ausgeführte Bewegung eine Bewegung mehrerer Getriebeglieder des Krans ist, die eine Änderung der Ausladung zur Folge hat,
dadurch gekennzeichnet, dass mittels einer Einrichtung zur Energierekuperation Rotationsenergie, die von einem von einer Seilwinde ablaufendem und an einem bewegten Getriebeglied angeschlossenen Seil an der Seilwinde erzeugt wird, von einem Generator in elektrische Energie umgewandelt wird. - Verfahren zum Betreiben eines Hebezeuges nach Anspruch 6, dadurch gekennzeichnet, dass die Bewegungi) eine Vergrößerung der Ausladung zur Folge hat, oderii) eine Verringerung der Ausladung zur Folge hat.
- Verfahren zum Betreiben eines Hebezeuges nach einem der Ansprüche 6 und 7, dadurch gekennzeichnet, dass die erzeugte elektrische Energie in ein Netz eingespeist wird und/oder wenigstens einer elektromotorischen Antriebseinheit des Hebezeuges zur Verfügung gestellt wird.
- Verfahren zum Betreiben eines Hebezeuges nach einem der Ansprüche 6 bis 8, dadurch gekennzeichnet, dass mittels einer mechanisch mit der Seilwinde gekoppelten Drehmomenterzeugungseinrichtung an der Seilwinde ein Drehmoment erzeugt wird, mit dem über das Seil eine Kraft, welche aus dem Eigengewicht der Getriebeglieder des Hebezeuges und/oder der anhängenden Last resultiert, kompensiert wird.
- Verfahren zum Betreiben eines Hebezeuges nach Anspruch 9, dadurch gekennzeichnet, dass die Drehmomenterzeugungseinrichtung während der Änderung der Ausladung in einer Momentenregelung betrieben wird.
- Verfahren zum Betreiben eines Hebezeuges nach einem der Ansprüche 6 bis 10, dadurch gekennzeichnet, dass eine Kraft zur Erzeugung einer Bewegung eines Getriebegliedes, die entgegen der Bewegung durchgeführt wird, die aufgrund zumindest eines Anteils der Eigengewichtskraft und der Gewichtskraft der Last erfolgt, mittels wenigstens eines translatorisch wirkenden Antriebes aufgebracht wird.
- Verfahren zum Betreiben eines Hebezeuges nach einem der Ansprüche 6 bis 11, dadurch gekennzeichnet, dass die Kraft zur Erzeugung einer Bewegung eines Getriebegliedes zur Änderung der Ausladung
sowie die Kraft zur Erzeugung des Drehmomentes zur Kompensation der aus dem Eigengewicht der Getriebeglieder des Hebezeuges und/oder der anhängenden Last resultierenden Kraft in einer Überwachungs- und/oder Regeleinheit erfasst wird, und die Überwachungs- und/oder Regeleinheit das Verfahren zum Betreiben des Hebezeuges derart steuert, dass entgegengesetzte Wirkungen der Kräfte ausgeschlossen sind. - Verfahren zum Betreiben eines Hebezeuges nach Anspruch 12, dadurch gekennzeichnet, dass die Kraft zur Erzeugung einer Bewegung eines Getriebegliedes zur Änderung der Ausladung durch die gemeinsame Überwachungs- und/oder Regeleinheit entsprechend der Leistungsanforderung weiter minimiert wird durch Über- oder Unterkompensation der aus dem Eigengewicht der Getriebeglieder des Hebezeuges und/ oder der anhängenden Last resultierenden Kraft.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL12164604T PL2514706T3 (pl) | 2011-04-19 | 2012-04-18 | Urządzenie dźwignicowe i sposób pracy urządzenia dźwignicowego |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102011007663A DE102011007663A1 (de) | 2011-04-19 | 2011-04-19 | Hebezeug und Verfahren zum Betreiben des Hebezeuges |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2514706A1 true EP2514706A1 (de) | 2012-10-24 |
| EP2514706B1 EP2514706B1 (de) | 2014-02-26 |
Family
ID=45977291
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12164604.6A Not-in-force EP2514706B1 (de) | 2011-04-19 | 2012-04-18 | Hebezeug und Verfahren zum Betreiben des Hebezeugs |
Country Status (8)
| Country | Link |
|---|---|
| EP (1) | EP2514706B1 (de) |
| DE (1) | DE102011007663A1 (de) |
| DK (1) | DK2514706T3 (de) |
| EA (1) | EA026439B1 (de) |
| ES (1) | ES2464390T3 (de) |
| PL (1) | PL2514706T3 (de) |
| PT (1) | PT2514706E (de) |
| UA (1) | UA115218C2 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3633109A1 (de) | 2018-10-05 | 2020-04-08 | Geax Srl | Bohrmaschine für gründungspfähle mit einer elektrischen energierückgewinnungswinde |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07213094A (ja) * | 1994-01-13 | 1995-08-11 | Hitachi Ltd | クレーン装置 |
| JPH1179655A (ja) * | 1997-09-11 | 1999-03-23 | Toshiba Eng Co Ltd | タイヤ走行式クレーン装置及びタイヤ走行式車両 |
| JP2001206673A (ja) * | 2000-01-31 | 2001-07-31 | Sumitomo Constr Mach Co Ltd | 電動移動式クレーン |
| JP2001341987A (ja) * | 2000-05-31 | 2001-12-11 | Matsushita Electric Works Ltd | 昇降装置およびその昇降装置の回生電力処理方法 |
| DE102006022010A1 (de) | 2006-05-10 | 2007-11-22 | Kirow Leipzig Ke Kranbau Eberswalde Ag | Verfahren und Einrichtung zum Eigenmasseausgleich des Auslegersystems von Drehkranen |
| WO2008059884A1 (fr) * | 2006-11-17 | 2008-05-22 | Tsuji Heavy Industries Co., Ltd. | Dispositif de commande |
| EP2065331A2 (de) * | 2007-12-01 | 2009-06-03 | Airmax Group Plc. | Verfahren und Vorrichtung zum Betreiben eines Krans und Verbesserungen an oder in Bezug auf die Stromerzeugung |
| SK287413B6 (sk) * | 2007-06-08 | 2010-09-07 | Technická Univerzita Vo Zvolene | Termoelektrické rekuperačné lanové zariadenie |
| JP2012062024A (ja) * | 2010-09-17 | 2012-03-29 | Mitsubishi Heavy Ind Ltd | 蓄電システム及び船舶 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU533546A1 (ru) * | 1971-07-09 | 1976-10-30 | Всесоюзный научно-исследовательский институт строительного и дорожного машиностроения | Гидравлический привод стрелового самоходного крана |
| RU2059565C1 (ru) * | 1993-04-13 | 1996-05-10 | Сергей Андреевич Козлов | Приводное устройство |
| DE102004010988A1 (de) * | 2004-03-03 | 2005-09-29 | Noell Mobile Systems & Cranes Gmbh | Hybridantriebssystem für einen Portalhubstapler |
| SK286944B6 (sk) * | 2006-03-22 | 2009-08-06 | Technická Univerzita Vo Zvolene | Rekuperačné lanové zariadenie na ťažbu dreva |
-
2011
- 2011-04-19 DE DE102011007663A patent/DE102011007663A1/de not_active Ceased
-
2012
- 2012-04-18 ES ES12164604.6T patent/ES2464390T3/es active Active
- 2012-04-18 EA EA201200504A patent/EA026439B1/ru not_active IP Right Cessation
- 2012-04-18 DK DK12164604.6T patent/DK2514706T3/da active
- 2012-04-18 EP EP12164604.6A patent/EP2514706B1/de not_active Not-in-force
- 2012-04-18 PL PL12164604T patent/PL2514706T3/pl unknown
- 2012-04-18 PT PT121646046T patent/PT2514706E/pt unknown
- 2012-04-18 UA UAA201204882A patent/UA115218C2/uk unknown
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07213094A (ja) * | 1994-01-13 | 1995-08-11 | Hitachi Ltd | クレーン装置 |
| JPH1179655A (ja) * | 1997-09-11 | 1999-03-23 | Toshiba Eng Co Ltd | タイヤ走行式クレーン装置及びタイヤ走行式車両 |
| JP2001206673A (ja) * | 2000-01-31 | 2001-07-31 | Sumitomo Constr Mach Co Ltd | 電動移動式クレーン |
| JP2001341987A (ja) * | 2000-05-31 | 2001-12-11 | Matsushita Electric Works Ltd | 昇降装置およびその昇降装置の回生電力処理方法 |
| DE102006022010A1 (de) | 2006-05-10 | 2007-11-22 | Kirow Leipzig Ke Kranbau Eberswalde Ag | Verfahren und Einrichtung zum Eigenmasseausgleich des Auslegersystems von Drehkranen |
| WO2008059884A1 (fr) * | 2006-11-17 | 2008-05-22 | Tsuji Heavy Industries Co., Ltd. | Dispositif de commande |
| SK287413B6 (sk) * | 2007-06-08 | 2010-09-07 | Technická Univerzita Vo Zvolene | Termoelektrické rekuperačné lanové zariadenie |
| EP2065331A2 (de) * | 2007-12-01 | 2009-06-03 | Airmax Group Plc. | Verfahren und Vorrichtung zum Betreiben eines Krans und Verbesserungen an oder in Bezug auf die Stromerzeugung |
| JP2012062024A (ja) * | 2010-09-17 | 2012-03-29 | Mitsubishi Heavy Ind Ltd | 蓄電システム及び船舶 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3633109A1 (de) | 2018-10-05 | 2020-04-08 | Geax Srl | Bohrmaschine für gründungspfähle mit einer elektrischen energierückgewinnungswinde |
| US11773651B2 (en) | 2018-10-05 | 2023-10-03 | Geax Srl | Drilling machine for foundation piles comprising an electric energy recovery winch |
Also Published As
| Publication number | Publication date |
|---|---|
| EA026439B1 (ru) | 2017-04-28 |
| PL2514706T3 (pl) | 2014-09-30 |
| EA201200504A2 (ru) | 2012-10-30 |
| EA201200504A3 (ru) | 2013-01-30 |
| DK2514706T3 (da) | 2014-06-02 |
| UA115218C2 (uk) | 2017-10-10 |
| EP2514706B1 (de) | 2014-02-26 |
| ES2464390T3 (es) | 2014-06-02 |
| PT2514706E (pt) | 2014-06-05 |
| DE102011007663A1 (de) | 2012-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2591228B1 (de) | Windenergieanlage und verfahren zur verstellung der rotordrehachse | |
| DE102009056245B4 (de) | Windenergieanlage mit Hebevorrichtung | |
| EP2764237B1 (de) | Verfahren und vorrichtung zum montieren eines rotors einer windenergieanlage | |
| EP1934129A1 (de) | Modularer gegengewichtswagen für krane, insbesondere für grosskrane | |
| EP3313770B1 (de) | Kran sowie verfahren zu dessen steuerung | |
| EP1641703B1 (de) | Mobilkranausleger mit daran angeordnetem autarken hydraulikaggregat | |
| DE112022000099T5 (de) | neuer verstellbarer Mehrzweck-Hubbalken und dessen Hubverfahren | |
| WO2018162350A1 (de) | Montagesystem zur durchführung eines installationsvorgangs in einem aufzugschacht einer aufzuganlage | |
| EP3350111B1 (de) | Elektrisch angetriebene arbeitsmaschine mit rückleistungsspeicherung sowie verfahren | |
| CH707887A1 (de) | Antriebssystem. | |
| EP2514706B1 (de) | Hebezeug und Verfahren zum Betreiben des Hebezeugs | |
| DE102019133048A1 (de) | Vorrichtung zur Notversorgung eines Hochvoltbordnetzes | |
| DE202011001850U1 (de) | Kran | |
| DE102008013688A1 (de) | Verfahren zum Anheben schwerer Lasten in einem Maschinenhaus einer Windenergieanlage | |
| WO2020089149A1 (de) | Hafenmobilkran mit einem verbesserten energieversorungssystem | |
| DE102011119655A1 (de) | Kran | |
| DE102017204291A1 (de) | Elektrohydraulischer Antrieb, Antriebsanordnung, Strömungsmaschine und Verfahren | |
| WO2020089151A1 (de) | Hafenkran mit einem verbesserten antriebssystem | |
| EP1582495A2 (de) | Lastaufnahmevorrichtung | |
| DE102019102285A1 (de) | Klemm- und Hubvorrichtung | |
| WO2014040716A1 (de) | Flugwindkraftanlage mit mehreren seilen im yoyo-betrieb | |
| DE102013113574A1 (de) | Hubgerüst mit hydraulikfreiem Hubantrieb | |
| WO2023161220A1 (de) | Windkraftanlage und verfahren zum speichern von windenergie in form von lageenergie in einer windkraftanlage | |
| DE102007042182A1 (de) | Windenergieanlage sowie Verfahren zum Betreiben einer Windenergieanlage | |
| DE102013002415A1 (de) | Verfahren zum Aufrichten eines langen Auslegers und Kran |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20130423 |
|
| 17Q | First examination report despatched |
Effective date: 20130527 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20131106 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 653471 Country of ref document: AT Kind code of ref document: T Effective date: 20140315 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502012000385 Country of ref document: DE Effective date: 20140417 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: PATENTANWAELTE SCHAAD, BALASS, MENZL AND PARTN, CH |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2464390 Country of ref document: ES Kind code of ref document: T3 Effective date: 20140602 Ref country code: DK Ref legal event code: T3 Effective date: 20140526 |
|
| REG | Reference to a national code |
Ref country code: PT Ref legal event code: SC4A Free format text: AVAILABILITY OF NATIONAL TRANSLATION Effective date: 20140509 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: T2 Effective date: 20140226 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140626 |
|
| REG | Reference to a national code |
Ref country code: GR Ref legal event code: EP Ref document number: 20140400992 Country of ref document: GR Effective date: 20140625 |
|
| REG | Reference to a national code |
Ref country code: EE Ref legal event code: FG4A Ref document number: E009290 Country of ref document: EE Effective date: 20140519 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 |
|
| REG | Reference to a national code |
Ref country code: PL Ref legal event code: T3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502012000385 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140418 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| 26N | No opposition filed |
Effective date: 20141127 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502012000385 Country of ref document: DE Effective date: 20141127 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140418 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150505 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20120418 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PT Payment date: 20160414 Year of fee payment: 5 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171018 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140226 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20190208 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20190418 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DK Payment date: 20190425 Year of fee payment: 8 Ref country code: FI Payment date: 20190416 Year of fee payment: 8 Ref country code: ES Payment date: 20190520 Year of fee payment: 8 Ref country code: LT Payment date: 20190405 Year of fee payment: 8 Ref country code: DE Payment date: 20190426 Year of fee payment: 8 Ref country code: NO Payment date: 20190423 Year of fee payment: 8 Ref country code: IT Payment date: 20190419 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20190423 Year of fee payment: 8 Ref country code: GR Payment date: 20190423 Year of fee payment: 8 Ref country code: LV Payment date: 20190423 Year of fee payment: 8 Ref country code: SE Payment date: 20190425 Year of fee payment: 8 Ref country code: TR Payment date: 20190408 Year of fee payment: 8 Ref country code: EE Payment date: 20190418 Year of fee payment: 8 Ref country code: BE Payment date: 20190418 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20190424 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20190416 Year of fee payment: 8 Ref country code: GB Payment date: 20190424 Year of fee payment: 8 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502012000385 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: EE Ref legal event code: MM4A Ref document number: E009290 Country of ref document: EE Effective date: 20200430 |
|
| REG | Reference to a national code |
Ref country code: FI Ref legal event code: MAE |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EBP Effective date: 20200430 Ref country code: NO Ref legal event code: MMEP |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MM Effective date: 20200501 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 653471 Country of ref document: AT Kind code of ref document: T Effective date: 20200418 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MM4D Effective date: 20200418 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200419 Ref country code: FI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200418 Ref country code: GR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201109 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200430 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201103 Ref country code: EE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200430 Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200418 Ref country code: LT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200418 Ref country code: NO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200430 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200430 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200430 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20200430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200430 Ref country code: LV Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200418 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20200418 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200501 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200430 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200418 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20210903 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200418 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200419 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200418 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200418 |