EP2469231A1 - Procédé et agencement associé à la navigation - Google Patents
Procédé et agencement associé à la navigation Download PDFInfo
- Publication number
- EP2469231A1 EP2469231A1 EP10196550A EP10196550A EP2469231A1 EP 2469231 A1 EP2469231 A1 EP 2469231A1 EP 10196550 A EP10196550 A EP 10196550A EP 10196550 A EP10196550 A EP 10196550A EP 2469231 A1 EP2469231 A1 EP 2469231A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- user
- data
- navigation
- parameter
- route
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3605—Destination input or retrieval
- G01C21/3617—Destination input or retrieval using user history, behaviour, conditions or preferences, e.g. predicted or inferred from previous use or current movement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3484—Personalized, e.g. from learned user behaviour or user-defined profiles
Definitions
- the present invention relates to a navigation arrangement in general and a navigation arrangement with enhanced functionality in particular.
- Navigation applications allow a user to map routes. Furthermore, the incorporation of GPS units and navigation applications provide users turn by turn directions from such applications, e.g. when operating a moving vehicle or walking. Furthermore, navigation applications have evolved to provide rudimentary information to users, such as traffic situation, weather conditions, tourist info etc.
- Navigation devices that include GPS (Global Positioning System) signal reception and processing functionality are well known and are widely employed as in-car or other vehicle navigation systems.
- a modern navigation device comprises a processor, memory, and map data stored within the memory.
- the processor and memory cooperate to provide an execution environment in which a software operating system may be established, and additionally it is commonplace for one or more additional software programs to be provided to enable the functionality of the device to be controlled, and to provide various other functions.
- Car navigation algorithms use a variety of different optimization methods. For example, when calculating the "optimum" way to travel from point A to point B, the "cost" for the different routs is calculated and added, and a decision is made upon their value.
- cost could be the distance (shortest route), another type would be the distance divided by the speed limits of the roads (fastest route), and yet another one uses the actual speed of the vehicles on that very road at a certain clock time.
- This data may be sent to a server that helps optimize the route based on different parameters, such as traffic congestion data, etc.
- the proposed invention enhances the overall navigation proposition by adding at least one new parameter based on the driver behavior.
- the driver behavior is detected by measuring at least one of a physiological or biometric value.
- the proposed method uses user related parameters, such as heart rate, heart sound, pulse, blood pressure, glucose levels, electromyogram signal levels (EMG), etc., or eye-blink rate, pupillary size, or any other parameter giving a measure on how tense the driver is, as one of the main parameters when determining routes.
- user related parameters such as heart rate, heart sound, pulse, blood pressure, glucose levels, electromyogram signal levels (EMG), etc., or eye-blink rate, pupillary size, or any other parameter giving a measure on how tense the driver is, as one of the main parameters when determining routes.
- a navigation system comprising a navigation device and a data providing device.
- the data providing device is configured to monitor a user and provided the navigation device with physiological and/or biometric data of the user.
- the physiological and/or biometrical data is at least one of heart rate, heart sound, pulse, blood pressure, glucose levels, electromyogram signal level (EMG), eye-blink rate, pupillary size, or a parameter giving a measure on the user's stress level.
- the system further comprises a sensor for detecting one or several of heart rate, heart sound, pulse, blood pressure, glucose levels, electromyogram signal level (EMG).
- EMG electromyogram signal level
- the system further comprise a sensor for detecting user eye related parameters.
- the invention also relates to a navigation device comprising: a processor configured to access digital map data and calculate a route to a destination.
- the route comprises one or more manoeuvres.
- the navigation device further comprises: a store for user related parameter data, which data indicates a the position of a specific parameter related to a user in the digital map, a data interrogator that is configured to access the user related parameter data store to determine whether there is a specific user parameter in the vicinity of a the manoeuvre, and a navigation instruction generator operable in the event that the data interrogator determines that a the parameter is located in the vicinity of the manoeuvre to generate for that manoeuvre an enhanced navigation instruction that refers to the parameter for provision to a user of the navigation device.
- the user related parameter data is physiological and/or biometrical data at least one of heart rate, heart sound, pulse, blood pressure, glucose levels, electromyogram signal level (EMG), eye-blink rate, pupillary size, or a parameter giving a measure on the user's stress level.
- the device may further comprising an interface for communication with a sensor for detecting one or several of heart rate, heart sound, pulse, blood pressure, glucose levels, electromyogram signal level (EMG).
- EMG electromyogram signal level
- the device may further comprise an interface for communication with a sensor for detecting user eye related parameters.
- the device may further comprise a communication interface, a user input/output interface portion, and a positioning unit.
- the device is a part of a mobile terminal.
- the invention also relates to a method in a navigation system.
- the method comprise: obtaining a route enquiry, processing a number of parameters, wherein at least one of the parameters is related to a user biometric or physiologic value, and determining a route based on the processed parameters.
- the biometric or physiologic value is one or several of heart rate, heart sound, pulse, blood pressure, glucose levels, electromyogram signal level (EMG), eye-blink rate, pupillary size, or a parameter giving a measure on the user's stress level.
- EMG electromyogram signal level
- eye-blink rate eye-blink rate
- pupillary size or a parameter giving a measure on the user's stress level.
- the value is added to other navigations parameters. In one embodiment the value is used to automatically alert and navigate the user to a nearby care center.
- Fig. 1 illustrates schematically a navigation system 100, comprising a navigation device 10, at least one sensor device 20', 20" and a server 30.
- the navigation device 10 comprises a controller 11, such as a micro-processor, a memory 12, a communication interface 13, a display 14 (or a user input/output interface portion) and a positioning or GPS unit 15.
- the memory 12 may at least be one of volatile and non-volatile, and commonly both, and within the memory map data may be stored.
- the controller 11 and memory 12 cooperate to provide an execution environment in which a software operating system may be established, and additionally it is commonplace for one or more additional software programs to be provided to enable the functionality of the navigation device to be controlled, and to provide various other functions.
- the controller 11 controls varying functions of the navigation device 10 based on the executed instructions set.
- the memory unit may comprise instructions set executed by the controller and other data used for providing navigation instructions.
- the device comprises one or more input interfaces 14 that allow a user to interact with and control the device, and one or more output interfaces (14) by means of which information may be relayed to the user.
- output interfaces include a visual display and a speaker for audible output.
- input interfaces include one or more physical buttons to control on/off operation or other features of the device (which buttons need not necessarily be on the device itself but could be on a steering wheel if the device is built into a vehicle), and a microphone for detecting user speech.
- the output interface display may be configured as a touch sensitive display (by means of a touch sensitive overlay or otherwise) to additionally provide an input interface by means of which a user can operate the device by touch.
- the navigation device may also include one or more physical connector interfaces by means of which power and optionally data signals can be transmitted to and received from the device, and optionally one or more wireless transmitters/receivers to allow communication over cellular telecommunications and other signal and data networks.
- the navigation device of this type also include a GPS antenna 16 by means of which satellite-broadcast signals, including location data, can be received and subsequently processed to determine a current location of the device.
- the positioning may also include cellular network positioning, triangulation etc.
- the device may also include electronic gyroscopes and accelerometers (not shown) which produce signals that can be processed to determine the current angular and linear acceleration, and in turn, and in conjunction with location information derived from the GPS signal, velocity and relative displacement of the device and thus the vehicle or user.
- electronic gyroscopes and accelerometers not shown
- Such features are most commonly provided in in-vehicle navigation systems, but may also be provided in navigation devices if it is expedient to do so.
- the utility of such devices is their ability to determine a route between two points, typically a start or current location position, and a second point, i.e. the destination.
- These locations can be input by a user of the device, by any of a wide variety of different methods, for example by postcode, street name and house number, previously stored "well known” destinations (such as famous locations, municipal locations (such as sports grounds or swimming baths) or other points of interest), and favourite or recently visited destinations.
- the navigation device may be enabled by software for computing a "best” or “optimum” route between the start and destination address locations from the map data.
- a “best” or “optimum” route is determined on the basis of predetermined criteria and need not necessarily be the fastest or shortest route, as will be described below.
- the selection of the route along which to guide the driver can be very sophisticated, and the selected route may take into account existing, predicted and dynamically and/or wirelessly received traffic and road information, historical information about road speeds, and the driver's own preferences for the factors determining road choice (for example the driver may specify that the route should not include motorways or toll roads) and also driver or user specific parameters.
- the device may continually monitor road, traffic and driver/use conditions, and offer to or choose to change the route due to changed conditions.
- the navigation system of the present invention uses additional parameters related to the driver/use to determine a route.
- the additional parameters are physiological and/or biometrical measurements and may be at least one of heart rate (sound, pulse, blood pressure, glucose levels, electromyogram signal levels (EMG), etc., or eye-blink rate pupillary size, or any other parameter giving a measure on how tense the driver is.
- heart rate sound, pulse, blood pressure, glucose levels, electromyogram signal levels (EMG), etc.
- EMG electromyogram signal levels
- eye-blink rate pupillary size or any other parameter giving a measure on how tense the driver is.
- the system comprises a measurement accessory for gathering and providing data to the navigation device.
- a measuring device 20' in form of a Personal Hands Free (PHF), such as a wristwatch or a Bluetooth headset enabled to measure heart rate using sound, pulse or blood pressure sensors and communicating a signal corresponding to the heart beat of the driver/user to the navigator device may be used.
- PHF Personal Hands Free
- Other measurement devices may include glucose meter, EMG meter for measure of the electric activity in a muscle, high-performance liquid chromatography for adrenalin measurement, etc.
- an optical device 20" such as a camera may be employed.
- the measurement accessory and the navigation device may communicate through wire, radio frequency (especially Bluetooth) or optically.
- the data gathered by the measurement accessory will be collected by the navigation device and may be processed onboard or transmitted to a server 30.
- the server may maintain all the collected data and build a physiological and/or biometric cost for a given part of a road.
- the physiological and/or biometric data may include heart rate, pulse level, blood pressure level, glucose levels, EMG levels, pupillary size, eye-blink rate, sound level, and stress levels, adrenalin level, etc.
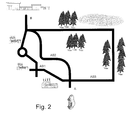
- Fig. 2 illustrates in an exemplary way how a route determination according to the present invention may proceed.
- the driver of a vehicle 30 plans to travel from point A to point B. According to the drawing there are three routs available: AB1, AB2 and AB3.
- AB1 is appears to be the shortest route, but it extends through an industrial zone with complicated turns, crossings, traffic circles, and stressful traffic during rush hours. Moreover, the environment is ugly, which causes mental stress.
- AB2 is also short but with hazardous high speed bends, which causes mental stress.
- AB3 is a longer route but it runs through an environment giving conception of natural beauty, which distresses the driver and calms him down.
- the less stressful environment influences the driver in a positive way with lower heart beat rate and eye-blink rate.
- the present invention uses these facts to provide a novel parameter when determining a route.
- a new parameter is added into the route cost computation: a low stress cost including at least one physiological or biometric cost.
- the physiological or biometric values are detected as mentioned earlier.
- the heart rate of a number of users are monitored and processed.
- a heart rate value e.g. 90 bpm (beats per minute) is calculated from values obtained from, e.g. 50 users and constitute a mean value for the drivers heart rate when drivers use AB1.
- the second route, AB2 may have the value 85 bpm as calculated mean value.
- the third route, AB3, may have the value 82 bpm as calculated mean value.
- AB1 is a "stressing" route to use based the augmented "heart rate cost” than AB2 and AB3.
- the system will use the heart rate as accost added to other parameters, such as route length, traffic situation, etc. used for calculating an effective route.
- this may be an option on the navigator device, allowing the user to use the option for a less stressful driving.
- eye-blink rate or a combination thereof same principles may be applied.
- An onboard system may operate in a similar way.
- the calculations and processing data is based only on the user(s) of the same device.
- the "heart rate cost” or "eye-blink cost” of different roads on a map may be calculated over different time periods of the day.
- the biometric data may be used to automatically alert and navigate the user to a nearby hospital or care center if the input data indicate a physical disorder.
- Fig. 3 illustrates the steps of a simplified method of the invention.
- a route enquiry is obtained
- the navigation device processes 2 a number of parameters, wherein at least one of the parameters is related to the user's biometric or physiologic value, and a route is determined 3 based on the processed parameters.
- the invention may be implemented in a mobile communication terminal, such as a mobile phone, which includes all features needed for navigation and data collection, and which wirelessly can communicate with a central unit.
- a “device” as the term is used herein, is to be broadly interpreted to include a radiotelephone having ability for GPS or network positioning, an organizer, a digital camera (e.g., video and/or still image camera), a personal communications system (PCS) terminal that may combine a cellular radiotelephone with data processing; a personal digital assistant (PDA) that can include a radiotelephone or wireless communication system and GPS; a laptop; and any other computation or communication device capable of positioning and transceiving, such as a personal computer, etc.
- a radiotelephone having ability for GPS or network positioning
- an organizer a digital camera (e.g., video and/or still image camera), a personal communications system (PCS) terminal that may combine a cellular radiotelephone with data processing
- PCS personal communications system
- PDA personal digital assistant
- any other computation or communication device capable of positioning and transceiving, such as a personal computer, etc.
- a computer-readable medium may include removable and non-removable storage devices including, but not limited to, Read Only Memory (ROM), Random Access Memory (RAM), compact discs (CDs), digital versatile discs (DVD), etc.
- program modules may include routines, programs, objects, components, data structures, etc. that perform particular tasks or implement particular abstract data types.
- Computer-executable instructions, associated data structures, and program modules represent examples of program code for executing steps of the methods disclosed herein. The particular sequence of such executable instructions or associated data structures represents examples of corresponding acts for implementing the functions described in such steps or processes.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP10196550A EP2469231A1 (fr) | 2010-12-22 | 2010-12-22 | Procédé et agencement associé à la navigation |
| US13/316,685 US20120150429A1 (en) | 2010-12-12 | 2011-12-12 | Method and arrangement relating to navigation |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP10196550A EP2469231A1 (fr) | 2010-12-22 | 2010-12-22 | Procédé et agencement associé à la navigation |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP2469231A1 true EP2469231A1 (fr) | 2012-06-27 |
Family
ID=43901524
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP10196550A Withdrawn EP2469231A1 (fr) | 2010-12-12 | 2010-12-22 | Procédé et agencement associé à la navigation |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20120150429A1 (fr) |
| EP (1) | EP2469231A1 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3059551A1 (fr) * | 2015-02-20 | 2016-08-24 | Volkswagen Aktiengesellschaft | Procédé et dispositif de planification d'un itinéraire pour un véhicule |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9202353B1 (en) | 2013-03-14 | 2015-12-01 | Toyota Jidosha Kabushiki Kaisha | Vibration modality switching system for providing navigation guidance |
| KR102043637B1 (ko) * | 2013-04-12 | 2019-11-12 | 한국전자통신연구원 | 감성 기반 경로 안내 장치 및 방법 |
| US9091561B1 (en) | 2013-10-28 | 2015-07-28 | Toyota Jidosha Kabushiki Kaisha | Navigation system for estimating routes for users |
| JP6325234B2 (ja) * | 2013-11-08 | 2018-05-16 | 公立大学法人広島市立大学 | 減速タイミング通知装置 |
| US10692370B2 (en) * | 2014-03-03 | 2020-06-23 | Inrix, Inc. | Traffic obstruction detection |
| US20150260531A1 (en) * | 2014-03-12 | 2015-09-17 | Logawi Data Analytics, LLC | Route planning system and methodology which account for safety factors |
| KR101589427B1 (ko) * | 2014-04-04 | 2016-01-27 | 현대자동차 주식회사 | 운전자 피로도 기반 차량운행 제어장치 및 방법 |
| US9618359B2 (en) * | 2014-09-25 | 2017-04-11 | Intel Corporation | Wearable sensor data to improve map and navigation data |
| WO2016114918A1 (fr) | 2015-01-15 | 2016-07-21 | Pcms Holdings, Inc. | Systèmes et procédés pour fournir des instructions de navigation sur la base d'émotions et d'activités |
| US9613505B2 (en) | 2015-03-13 | 2017-04-04 | Toyota Jidosha Kabushiki Kaisha | Object detection and localized extremity guidance |
| US10328852B2 (en) | 2015-05-12 | 2019-06-25 | University Of North Dakota | Systems and methods to provide feedback to pilot/operator by utilizing integration of navigation and physiological monitoring |
| ITUB20155156A1 (it) * | 2015-10-27 | 2017-04-27 | Univ Politecnica Delle Marche | Metodo e sistema di navigazione |
| WO2017093440A1 (fr) * | 2015-12-02 | 2017-06-08 | Koninklijke Philips N.V. | Sélection d'itinéraire pour diminuer le stress pour des conducteurs |
| CN106931984A (zh) * | 2015-12-30 | 2017-07-07 | 大众汽车(中国)投资有限公司 | 一种用于引导路线生成的方法和装置 |
| US10269075B2 (en) * | 2016-02-02 | 2019-04-23 | Allstate Insurance Company | Subjective route risk mapping and mitigation |
| WO2019132770A1 (fr) * | 2017-12-30 | 2019-07-04 | Kaha Pte. Ltd. | Procédé et système de rendu d'un itinéraire de navigation sûr |
| US10775178B2 (en) * | 2018-08-14 | 2020-09-15 | International Business Machines Corporation | Spatio-temporal re-routing of navigation |
| BR112022005168A2 (pt) * | 2019-09-19 | 2022-06-14 | Ericsson Telefon Ab L M | Método realizado por um dispositivo terminal, dispositivo terminal, e, produto de programa de computador |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10253379A (ja) * | 1997-03-13 | 1998-09-25 | Nissan Motor Co Ltd | 経路誘導装置 |
| EP1291226A2 (fr) * | 2001-08-28 | 2003-03-12 | Pioneer Corporation | Méthode et système pour fournir des informations |
| EP1304250A2 (fr) * | 2001-10-12 | 2003-04-23 | Pioneer Corporation | Appareil de mesure de condition biologique et procédé, unité de système de navigation mobile et procédé, appareil de bibliothèque de données et logiciel d'ordinateur |
| JP2004243948A (ja) * | 2003-02-14 | 2004-09-02 | Mazda Motor Corp | 自動車用健康管理システム、自動車用健康管理方法、及び、自動車用健康管理プログラム |
| DE102004056868A1 (de) * | 2004-11-25 | 2006-06-01 | Hella Kgaa Hueck & Co. | Anordnung zur Erkennung von Lichtbögen und/oder Kurzschlüssen in einem Stromkreis |
| DE102004056686B3 (de) * | 2004-11-24 | 2006-07-13 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren und Vorrichtung zur Automatisierten Individuellen Navigation eines Kraftfahrzeugs |
| JP2007205765A (ja) * | 2006-01-31 | 2007-08-16 | Equos Research Co Ltd | 経路探索装置 |
| JP2007322249A (ja) * | 2006-05-31 | 2007-12-13 | Equos Research Co Ltd | 経路探索装置 |
| JP2008015561A (ja) * | 2006-06-30 | 2008-01-24 | Equos Research Co Ltd | 情報提供車両及び運転支援装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2002255568B8 (en) * | 2001-02-20 | 2014-01-09 | Adidas Ag | Modular personal network systems and methods |
| WO2011011454A1 (fr) * | 2009-07-21 | 2011-01-27 | Zoll Medical Corporation | Systèmes et procédés de collecte, dorganisation et daffichage d'informations d'assistance médicale d'urgence |
| US20110118969A1 (en) * | 2009-11-17 | 2011-05-19 | Honeywell Intellectual Inc. | Cognitive and/or physiological based navigation |
-
2010
- 2010-12-22 EP EP10196550A patent/EP2469231A1/fr not_active Withdrawn
-
2011
- 2011-12-12 US US13/316,685 patent/US20120150429A1/en not_active Abandoned
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10253379A (ja) * | 1997-03-13 | 1998-09-25 | Nissan Motor Co Ltd | 経路誘導装置 |
| EP1291226A2 (fr) * | 2001-08-28 | 2003-03-12 | Pioneer Corporation | Méthode et système pour fournir des informations |
| EP1304250A2 (fr) * | 2001-10-12 | 2003-04-23 | Pioneer Corporation | Appareil de mesure de condition biologique et procédé, unité de système de navigation mobile et procédé, appareil de bibliothèque de données et logiciel d'ordinateur |
| JP2004243948A (ja) * | 2003-02-14 | 2004-09-02 | Mazda Motor Corp | 自動車用健康管理システム、自動車用健康管理方法、及び、自動車用健康管理プログラム |
| DE102004056686B3 (de) * | 2004-11-24 | 2006-07-13 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren und Vorrichtung zur Automatisierten Individuellen Navigation eines Kraftfahrzeugs |
| DE102004056868A1 (de) * | 2004-11-25 | 2006-06-01 | Hella Kgaa Hueck & Co. | Anordnung zur Erkennung von Lichtbögen und/oder Kurzschlüssen in einem Stromkreis |
| JP2007205765A (ja) * | 2006-01-31 | 2007-08-16 | Equos Research Co Ltd | 経路探索装置 |
| JP2007322249A (ja) * | 2006-05-31 | 2007-12-13 | Equos Research Co Ltd | 経路探索装置 |
| JP2008015561A (ja) * | 2006-06-30 | 2008-01-24 | Equos Research Co Ltd | 情報提供車両及び運転支援装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3059551A1 (fr) * | 2015-02-20 | 2016-08-24 | Volkswagen Aktiengesellschaft | Procédé et dispositif de planification d'un itinéraire pour un véhicule |
| EP3940340A1 (fr) * | 2015-02-20 | 2022-01-19 | Volkswagen Aktiengesellschaft | Procédé de détermination d'un itinéraire pour un véhicule |
Also Published As
| Publication number | Publication date |
|---|---|
| US20120150429A1 (en) | 2012-06-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2469231A1 (fr) | Procédé et agencement associé à la navigation | |
| US10288436B2 (en) | Method and apparatus for recommending a route | |
| EP2556339B1 (fr) | Procédé et dispositif de génération d'une fonction de coût | |
| EP2867619B1 (fr) | Procédés et systèmes de production de données de charge de travail pour conducteur | |
| JP5648447B2 (ja) | 周遊ルート生成装置、周遊ルート生成方法、及びプログラム | |
| EP3133371A1 (fr) | Appareil et procédé de recherche d'itinéraire | |
| KR20150143822A (ko) | 이동 정보를 제공하기 위한 방법 및 장치 | |
| CA3036151A1 (fr) | Procede, systeme et logiciel de navigation dans des environnements non couverts par le systeme mondial de localisation (gps) | |
| KR20140089516A (ko) | 루트 평탄화 | |
| JP4381466B2 (ja) | 情報提供装置、情報提供方法、及び情報提供プログラム | |
| TW201017123A (en) | Data enrichment apparatus and method of determining temporal access information | |
| JP2015191256A (ja) | 危険度合い判定装置、危険度合い判定方法および危険度合い判定プログラム | |
| JP2018181386A (ja) | 危険度合い判定装置、危険度合い判定方法および危険度合い判定プログラム | |
| KR20150050837A (ko) | 운전자 성향에 따라 도착예정시간을 산출하는 시스템 및 그 운용방법 | |
| US11808591B2 (en) | Affective-cognitive load based navigation | |
| Borokhov et al. | An adaptive routing system for location-aware mobile devices on the road network | |
| JP6757230B2 (ja) | 車載装置および覚醒システム | |
| US10648821B2 (en) | Systems and methodologies for route planning | |
| JP6841665B2 (ja) | 表示システム、サーバ、電子装置および地図表示方法 | |
| JP7259930B2 (ja) | 情報処理装置、ナビゲーションシステム、経路設定方法及びプログラム | |
| JP2019002789A (ja) | 情報処理装置、情報処理方法、およびプログラム | |
| JP2019101191A (ja) | 走行データ評価システム、情報処理システム、情報処理サーバ | |
| JP7462022B1 (ja) | 情報処理装置、情報処理方法及び情報処理プログラム | |
| KR20230079197A (ko) | 경로를 결정하기 위한 방법 및 장치 | |
| WO2023047773A1 (fr) | Dispositif de traitement d'informations, procédé de réglage d'itinéraire et support d'enregistrement |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20121227 |
|
| 17Q | First examination report despatched |
Effective date: 20130415 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20130827 |