EP1903201A2 - Strategie und Steuerung zur Ventilsteuerung - Google Patents
Strategie und Steuerung zur Ventilsteuerung Download PDFInfo
- Publication number
- EP1903201A2 EP1903201A2 EP07018287A EP07018287A EP1903201A2 EP 1903201 A2 EP1903201 A2 EP 1903201A2 EP 07018287 A EP07018287 A EP 07018287A EP 07018287 A EP07018287 A EP 07018287A EP 1903201 A2 EP1903201 A2 EP 1903201A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- voltage
- controller
- actuator
- battery
- supply means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000011217 control strategy Methods 0.000 title description 4
- 238000004891 communication Methods 0.000 claims abstract description 5
- 239000003990 capacitor Substances 0.000 claims description 33
- 230000004913 activation Effects 0.000 claims description 28
- 238000002347 injection Methods 0.000 claims description 18
- 239000007924 injection Substances 0.000 claims description 18
- 238000000034 method Methods 0.000 claims description 16
- 238000012360 testing method Methods 0.000 claims description 5
- 230000000977 initiatory effect Effects 0.000 claims description 2
- 230000009849 deactivation Effects 0.000 claims 2
- 239000000446 fuel Substances 0.000 description 18
- 238000005259 measurement Methods 0.000 description 9
- 238000004364 calculation method Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000001010 compromised effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000002405 diagnostic procedure Methods 0.000 description 1
- HDDSHPAODJUKPD-UHFFFAOYSA-N fenbendazole Chemical compound C1=C2NC(NC(=O)OC)=NC2=CC=C1SC1=CC=CC=C1 HDDSHPAODJUKPD-UHFFFAOYSA-N 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000007620 mathematical function Methods 0.000 description 1
- 230000003134 recirculating effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 230000007306 turnover Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images











Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/20—Output circuits, e.g. for controlling currents in command coils
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/20—Output circuits, e.g. for controlling currents in command coils
- F02D2041/2003—Output circuits, e.g. for controlling currents in command coils using means for creating a boost voltage, i.e. generation or use of a voltage higher than the battery voltage, e.g. to speed up injector opening
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/50—Input parameters for engine control said parameters being related to the vehicle or its components
- F02D2200/503—Battery correction, i.e. corrections as a function of the state of the battery, its output or its type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/2406—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using essentially read only memories
- F02D41/2409—Addressing techniques specially adapted therefor
- F02D41/2422—Selective use of one or more tables
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/06—Electromagnets; Actuators including electromagnets
- H01F7/08—Electromagnets; Actuators including electromagnets with armatures
- H01F7/18—Circuit arrangements for obtaining desired operating characteristics, e.g. for slow operation, for sequential energisation of windings, for high-speed energisation of windings
- H01F7/1844—Monitoring or fail-safe circuits
- H01F2007/1855—Monitoring or fail-safe circuits using a stored table to deduce one variable from another
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/06—Electromagnets; Actuators including electromagnets
- H01F7/08—Electromagnets; Actuators including electromagnets with armatures
- H01F7/18—Circuit arrangements for obtaining desired operating characteristics, e.g. for slow operation, for sequential energisation of windings, for high-speed energisation of windings
- H01F7/1805—Circuit arrangements for holding the operation of electromagnets or for holding the armature in attracted position with reduced energising current
- H01F7/1816—Circuit arrangements for holding the operation of electromagnets or for holding the armature in attracted position with reduced energising current making use of an energy accumulator
Definitions
- the present invention relates to a valve control strategy and controller. More particularly, the present invention relates to a method and a device for controlling a solenoid valve, particularly for injecting fuel into an internal combustion engine.
- actuator controlled valves e.g. solenoid valves
- solenoid valves are used to control the flow of fuel within the injector, and hence, timing, pressure and quantity of fuel injected into the engine cylinders.
- a single solenoid valve - known as the "Spill Valve” - is used to control the point at which fuel pressure within the injector volume begins to increase. If the valve is open, fuel will be allowed to "spill” to low pressure (the fuel tank). Alternatively, if the valve is closed, the mass of fuel within the injector will undergo pressurisation due to the advancing cam-driven plunger reducing the injector volume. Injection of fuel into the engine's cylinder occurs once the fuel pressure within the injector becomes greater than the spring pressure which holds the injector needle closed against its seat, resulting in "injector needle lift".
- EUIs Electronic Unit Injectors
- EUPs Electronic Unit Pumps
- NOP Nozzle Opening Pressure
- a secondary solenoid valve is used to regulate the control pressure applied to the back of the injector needle and, hence, NOP can exceed the needle spring pressure (i.e., variable NOP).
- This solenoid valve is known as the "Needle Control Valve”. It is a "three-way” valve, in that it exposes the port, the pressure of which is to be controlled, to either a high control pressure (when de-energised) or a drain pressure (when energised).
- This invention refers to the control of both single and twin valve injection systems.
- Valve movement is facilitated by means of an actuator which comprises an electromagnetic stator (a series of coil windings wound around a stator core), through which a current is passed to activate an armature.
- An electromagnetic stator a series of coil windings wound around a stator core
- a valve pin is directly attached to the armature, and subsequent movement of the armature/valve assembly is used to control flow of fuel within the injector.
- the valve pin is held in the open position by a return spring, therefore any electromagnetic force induced by the solenoid coil is working against the spring to close the valve.
- the control of the solenoid valve is divided into two general categories, a so called “pull-in” phase and a “hold phase”.
- the armature of the solenoid-controlled valve is caused to close by the application of a first current level through the solenoid coil.
- a second, lower current level is supplied to the solenoid coil to keep the valve closed.
- the driving current provided during the pull-in phase is supplied by a capacitor.
- the capacitor and associated circuitry provide a further voltage supply means (in addition to the battery) and are hereinafter collectively referred to as the "Boost circuit".
- the driving current provided during the hold phase is supplied by applying the standard battery voltage across the solenoid coil in order to provide the second current level.
- a so-called “chopping circuit” controls the application of the battery voltage so that the required drive current supplied to the actuator throughout the injection is between defined upper and lower hold thresholds.
- the chopping circuit may constantly apply the battery voltage to the solenoid coil during the entire hold phase of injection in order to maintain the driving current to the solenoid between the desired threshold levels.
- Boost voltage pulses additional voltage pulses
- the frequency of the additional Boost voltage pulses may be controlled by electronic hardware or alternatively by a software module running as part of the Boost circuitry.
- the activation of additional boost voltage pulses is determined with respect to the battery voltage as measured by the vehicle's engine control unit (ECU). In other words, once the battery voltage, as measured by the ECU, drops below a calibrated threshold value, additional boost pulses are activated.
- the solenoid coil resistance changes depending on the operating conditions of the engine. For example, when the engine is cold the solenoid coil resistance will be lower than when the engine is hot. During periods of low solenoid coil resistance, coil current levels will be higher at low voltages compared to periods of higher solenoid coil resistance. The requirement for an additional series of Boost voltage pulses will therefore reduce during such periods.
- the determining factor that governs whether the Boost circuitry is activated to provide additional voltage pulses is the voltage across the battery as measured by the ECU.
- existing systems do not take account of the operating conditions of the engine and the resistance of the solenoid coils when determining when to provide additional voltage pulses.
- battery voltage is often at its lowest when attempting to start the engine in very cold conditions, because, typically, the engine lubrication oil viscosity is much higher and the engine is therefore that much harder to turn over taking a greater drain on the battery. Additionally the battery may struggle to perform as well at the lower temperatures.
- a controller for controlling the operation of a valve in an engine system, the valve being in communication with a battery and a further voltage supply means and comprising an actuator, the controller comprising inputs for receiving data representing the voltage across the battery and further voltage supply means and the current through the actuator; a processor programmed to determine a control function for controlling the operation of the valve; and outputs for outputting the control function as determined by the processor to control the operation of the valve wherein the processor is arranged to determine the resistance of the actuator from the data representing the voltage across the further voltage supply means and the current through the actuator and to determine the control function for controlling the operation of the valve in dependence on the voltage across the battery and the resistance of the actuator.
- the present invention provides a controller for controlling valve operation in which a number of valve system parameters, e.g. voltage across the further voltage supply means that provides the Boost voltages and also the current through the actuator (i.e. the current through the solenoid coil), are measured and then used to determine a control function for controlling the valve operation.
- a number of valve system parameters e.g. voltage across the further voltage supply means that provides the Boost voltages and also the current through the actuator (i.e. the current through the solenoid coil)
- the processor can then determine a control function for controlling the voltages applied by the battery and further voltage supply means in accordance with the measured current and voltage values.
- the control function may control the valve operation either via a software based control system or via changes to a hardware control circuit.
- the control function comprises a voltage pulse logic structure that relates to the voltage levels to be applied across the actuator.
- the voltage pulse logic structure may comprise logic structures that relate to the operation of the further voltage supply means and logic structures that relate to the operation of the battery.
- the battery and further voltage supply means will be controlled by the switching of control switches (power switches) within the power circuit for the engine control.
- the control function comprises a control sequence for controlling the switching of the control switches within the engine's power circuit.
- the controller will sub-divide the operation of the valve into two phases, a so-called pull-in phase and a hold phase, and will determine the control function appropriately.
- a voltage pulse from the further voltage supply means is applied across the solenoid coil within the actuator in order to cause the valve to move from a first state (e.g. valve open) to a second state (e.g. valve closed).
- Boost voltage first voltage potential
- the valve Once the valve has been closed the valve enters the hold phase in which the battery voltage (second voltage potential) that is applied across the actuator (solenoid coil) is sufficient to hold the valve closed.
- the controller is preferably arranged to apply at least one further pulse from the further voltage supply means across the actuator.
- This further pulse is preferably at a voltage potential greater than the battery voltage and more preferably at the first voltage potential.
- the controller is preferably arranged to apply the second voltage potential (the battery voltage) across the actuator in between the further pulses. This has the advantage of reducing the power that is drawn from the boost capacitor.
- the drive circuit may comprise a high side switch to gate the battery voltage or the further voltage supply means and a boost switch to control the further pulses.
- the control function may in this case be arranged to send control pulses to the boost switch and to continuously drive the high side switch until the end of the hold phase.
- the controller further comprises (i) a two dimensional function map that relates the voltage across the further voltage supply means and the current flowing through the actuator to the resistance of the actuator and (ii) a one dimensional map that relates the resistance of the actuator to the battery voltage at which further voltage pulses from the further voltage supply means are required, i.e. an activation voltage.
- the controller uses the voltage across the further voltage supply means and actuator current measurements received at its inputs to determine the resistance of the actuator from the first function map. Once the resistance of the actuator has been determined the second function map can be used to derive the activation voltage that signals that further capacitor voltage pulses are required to control the valve operation. The battery voltage can then be monitored and as soon as this falls below the activation voltage one or more further pulses at the voltage of the further voltage supply means (Boost voltage pulses) can be applied to the actuator.
- Boost voltage pulses Boost voltage pulses
- the first and second function mode maps can be populated with data derived during one or more test phases, i.e. during manufacturing or testing / calibration of the engine system.
- the controller measures the voltage across the capacitor prior to initiation of the pull-in phase, i.e. when the capacitor is fully charged.
- the current flowing through the solenoid coil of the actuator can conveniently be measured during the pull-in phase so that the controller may initiate extra Boost pulses as needed during the hold phase.
- the controller preferably applies a hysteresis band about the activation voltage such that the battery voltage must rise above the activation voltage + the hysteresis band before the additional Boost pulses are discontinued.
- the current level through the coil of solenoid valves in fuel injection systems is often measured at around 60% of the interval between the start of the pull-in phase and pull-in peak current (typically 200-400 microseconds after the start of the pull-in phase) for diagnostic purposes (e.g. to determine if there are any short circuits).
- the current value measured at this time can be passed to the controller for use in determining the resistance of the solenoid coil within the actuator.
- control function is arranged to maintain the current through the actuator between upper and lower hold thresholds during the hold phase.
- the actuator comprises a solenoid coil and the first and second function maps relate to the resistance through the coil of the solenoid.
- the further voltage supply means comprises a capacitor.
- the invention extends to an engine control unit for a vehicle and a vehicle comprising a controller according to the first aspect of the present invention.
- Vehicle electrical systems that use solenoids to control fuel injection equipment often experience significant drops in the normal operating voltage of the battery during certain engine conditions, e.g. during engine starting wherein the nominal battery voltage can drop briefly by up to 50% of its normal value.
- Vehicle systems that comprise Boost circuitry as described above may exploit the systems ability to supply Boost pulses in order to allow the solenoid coils to be designed for operation at normal system voltage and to maintain the current at voltages lower than normal system voltage.
- Boost circuitry By using the Boost circuitry during periods of low battery voltage, the operating current of the injector solenoid can be reduced to about half that of existing systems.
- a vehicle injection system comprising a controller, at least one solenoid valve, the operation of the at least one valve being controlled by the controller, a battery having a normal operating voltage of V BAT and a further voltage supply means, wherein
- the controller is the controller according to the first aspect of the present invention.
- a method of controlling the operation of a valve in an engine system comprising: receiving data representing the voltage across the battery and the voltage across the further voltage supply means; receiving data representing the current through the actuator; determining a control function for controlling the operation of the valve in dependence on the voltage across the further voltage supply means and the current through the actuator, and; outputting the control function to the battery and further voltage supply means.
- a carrier medium for carrying a computer readable code for controlling a processor, computer, controller or engine control unit to carry out the method of the second aspect of the invention.
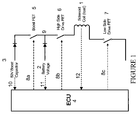
- the solenoid coil 1 can be energised by passing a current therethrough in order to induce motion in the valve armature (not shown).
- the solenoid coil 1 is electrically connected to a battery 2 and a capacitor 3 which are operated to provide the requisite electrical current through the solenoid coil 1 to control valve motion.
- a suitable control means depicted in this example as the electronic control unit (ECU) 4 of the engine system, controls the operation of the battery 2 and capacitor 3.
- ECU electronice control unit
- the ECU 4 sends control signals to the Boost FET 5, High Side Drive (HSD) FET 6, and Low Side Drive (LSD) FET 7 in order to close or open the electrical circuit depicted in Figure 1.
- Closing of the LSD FET 7, along with the HSD FET 6 will expose the solenoid coil 1 to battery voltage 2.
- the Boost FET 5 is closed, then the coil is exposed to the boost capacitor 3 which applies a 50V Boost voltage (compared to the normal battery voltage level of around 14V) across the solenoid coil.
- Charging of the boost capacitor 3 is performed by the battery 2 via the "Boost Circuit" (not shown).
- the Boost Circuit additionally comprises a DC/DC converter (for charging the capacitor).
- the DC/DC converter should operate down to at least 50% of the normal battery voltage. So, for a nominal 12volt system operating at up to 14volts, it is capable of operating at 6volts.
- the solenoid valve Prior to the valve closing, the solenoid valve is held open by the action of a return spring (not shown) within the valve. In order to trigger valve motion against the action of the return spring, an initial "pull in” phase is initiated. This is achieved when the ECU 4 sends a series of control signals 8a, 8b, 8c to all FET switches 5, 6, 7, indicating 'on', which results in 50V being applied across the solenoid coil 1, and subsequent current flow through the coil via electrical connection 9. In other words, during the pull in phase, the capacitor applies a Boost voltage 3 across the solenoid coil 1.
- the ECU 4 instructs the HSD FET 6, and LSD FET 7 (by sending control signals 8b and 8c) to apply a voltage (or series of voltage pulses) across the solenoid coil 1 via electrical connection 9. Therefore, once the valve has been closed, the battery 2 applies a battery voltage across the solenoid coil 1.
- the ECU 4 is capable of measuring (depicted as signal 10 in Figure 1) the voltage across the capacitor 3 terminals.
- the ECU 4 is also capable of measuring the battery voltage (depicted as signal 11 in Figure 1) and also the current flowing through the solenoid 1 (depicted as signal 12 in Figure 1).
- Figure 2 shows a control logic trace 31 representing the control signals (8a and 8b) sent from the ECU 4 to the Boost FET 5 and HSD FET 6. Note that the control logic trace also represents the voltage level applied across the solenoid coil 1 resulting from operation of the FET switches.
- Figure 2 further shows a current waveform trace 33 that represents the current flowing through the solenoid coil 1 as a result of the voltages applied by the capacitor 3 and battery 2.
- the capacitor 3 is capable of providing a Boost voltage potential of 50V across the solenoid coil 1.
- the battery voltage (V BAT - typically 14V) is lower than the Boost voltage.
- the pull in phase of operation is initiated by the ECU 4 sending a control signal 8a and 8b to the Boost FET 5 and HSD FET 6 to apply a Boost voltage to the solenoid coil 1.
- the control logic 33 therefore comprises a Boost command 35.
- the Boost voltage As the Boost voltage is applied, the current through the coil 1 rises to an initial peak value 37.
- the Boost command lasts until the ECU detects that the coil current has reached the upper peak threshold (typically 10Amp), or, until a specified "Pull-in time” (defined in software, typically 750 microseconds) has elapsed - whichever of the two comes first.
- the Boost command/voltage stops the current through the actuator begins to fall (indicated as 39 on Figure 2). This corresponds to the end of the pull in phase and the start of the hold phase.
- the driving current through the actuator coil 1 during the hold phase of operation should be between upper and lower hold thresholds (41 and 43 respectively).
- the ECU 4 applies a series of battery voltage pulses (V BAT ) to the actuator by sending a series of commands (45a, 45b, 45c, 45d...45n) to the HSD FET 6.
- V BAT battery voltage pulses
- the control signal 8c from the ECU 4 to the LSD FET 7 is 'on' in order to close the circuit.
- each command (45) corresponds to the driving current reaching the lower hold threshold 43.
- the end of each command (45) corresponds to the driving current reaching the upper hold threshold 41.
- the ECU 4 continues to apply voltage pulses of V BAT until injection through the valve (and, therefore, the hold phase) is due to end.
- the solenoid valve will operate in accordance with the control logic shown in Figure 2 during periods when the battery is running at the standard battery voltage.
- valve 1 may be operated in accordance with the control logic depicted in Figure 3.
- the Boost command 35 takes place as described in relation to Figure 2.
- a command 47 is then sent to the HSD FET 6 to apply the battery voltage across the solenoid coil 1 as before. However, in this case the battery voltage has dropped from its nominal operating level and as a consequence the current falls below the lower threshold value 43.
- the ECU 4 keeps the battery voltage applied during the entire hold phase of injection in order to keep the driving current between the upper and lower threshold values (41,43).
- the hold phase current may drop below the lower threshold value 43.
- the ECU 4 may apply a series of additional Boost voltage pulses from the capacitor 3 to the solenoid coil 1 in order raise the driving current during the hold phase back above the lower hold threshold 43.
- Boost re-drive activation of the control scenario of Figure 4 (hereinafter referred to as "Boost re-drive") is initiated by the ECU 4 detecting, via measurement signal 11, that the voltage across the battery 2 has dropped below a threshold level.
- the battery voltage is applied constantly during the hold phase (as noted above in relation to Figure 4), while the capacitor 3 is used to maintain the driving current above the minimum current requirement (lower threshold 43). It is noted that the capacitor will only partially discharge when providing voltage pulses during the Boost re-drive strategy).
- the present invention provides a method of determining (and an associated device for determining) the activation threshold of the Boost re-drive strategy as a function of the resistance of the solenoid coils.
- FIG. 5 shows a more detailed version of the control strategy and current waveform of Figure 4 where like numerals denote like features.
- the pull-in (53) and hold (55) phases of operation of the pulse control logic are shown in Figure 5.
- the left hand foot of the Boost command 35 represents the start of pulse logic.
- the first current sample time 57 is approximately 20 microseconds after the start of the Boost command 35 in the present example.
- the second current sample time 59 is measured after approximately 60% of the interval between the start of the Boost command 35 and the peak current 37. It is noted that for a needle valve this is approximately 220 microseconds after the start of the Boost command 35 and for a spill valve it is approximately 390 microseconds after the start of the Boost command.
- the reason for measuring the first and second current samples (57, 59) is to allow diagnostic tests to be performed on the injector to allow the presence of certain faults to be determined. However, as described below these current samples can be used to determine an approximation of the actuator coil resistance.
- the current measured at the second sample time 59 may also be affected by changes in the voltage that appears across the fully charged capacitor (i.e. the voltage that appears across the capacitor at the time indicated as 63 in Figure 4). For example, if the capacitor voltage is less than the expected 50volts then the measured current at time 59 will be lower than expected for a given temperature.
- the coil resistance will be indicated by the current at the second current sample time 59 and the voltage that appears across the capacitor at time 63.
- the ECU 4 can measure the current across the coil 1 (via measurement signal 12) and the voltage that appears across the capacitor 3 prior to capacitor discharge (via measurement signal 10) and can then look up the coil resistance from the 2D map.
- the coil resistance can be linked to the Boost re-drive activation voltage threshold via a further (1D) map. If the coil resistance is low then the activation voltage threshold will be high and vice versa.
- the 1D map may be calibrated during a test bench phase (in a similar manner to the 2D map calibration).
- the ECU 4 can then compare the current battery voltage (via measurement signal 11) with the activation voltage threshold. If the battery voltage drops below the calculated Boost re-drive voltage threshold then the Boost re-drive strategy can be switched on and the ECU may operate the solenoid valve 1 in the manner shown in Figures 4 and 5.
- the current and voltage measurements taken by the ECU 4 may be passed through first-order filters to reduce noise.
- a hysteresis band may be established around the activation voltage threshold in order to avoid rapid on/off enabling of the Boost re-drive strategy due to minor voltage fluctuations which may occur.
- the Boost re-drive strategy can be stopped by the ECU 4.
- Figure 7 shows an example of the 2D map used to determine the coil resistance.
- the current measurement at the second sample time 59 is on the x-axis and the voltage across the capacitor at the time 63 is on the y-axis. For each map point the resistance across the solenoid coil 7 is shown. These resistance values can be determined during a test bench phase and the map can later be used by the ECU 4.
- Figure 8 shows an example of the 1 D map used to determine the activation voltage threshold in dependence on the value of the coil resistance determined from Figure 7.
- Figures 9 and 10 are block diagram representations of the data flow within the ECU software.
- Software variables enter the module at the left via the in-ports, and flow from left to right along the signal lines (black lines with arrows).
- the variable name is listed below the in-port.
- Software constants are represented as boxes with the constant name within the box. All other mathematical functions (addition, multiplication, look-up tables, and so on) are represented as blocks, with the required inputs entering on the left, and the result of the mathematical procedure exiting on the right. This usually results in a new software variable name which is written beneath the new variable signal line, or below the exit port at the far right of the module.
- FIG 9 shows the logic steps involved in the calculation of the coil resistance.
- the coil current sample (control signal 12 in Figure 1), comes in through in-port 1
- the boost capacitor voltage signal (control signal 10 in Figure 1)
- Both signals are then passed to respective first-order filters to remove signal noise, which must be 'tuned' as part of the calibration process. This is done using the constants on the left, which control the sensitivity of the first-order filters.
- the filtered signals are then passed to a 2-D calibrated look-up table, labelled REQ-002, where the two input variables of voltage and current are converted into an estimate of coil resistance.
- an upper and lower limit is placed on the coil resistance value as a safe-guard to the rest of the software in case unusual numbers for the coil resistance emerge from the 2-D map (for example, 25 ohm instead of 2.5 ohm is accidentally entered during the calibration process).
- the resistance estimate is then passed to the Boost Re-drive activation control module (described in relation to Figure 10).
- Figure 10 shows the calculation of the Boost Re-drive activation voltage threshold and logic to determine the state of the Boost Re-drive strategy.
- the calculated value for the coil resistance enters through in-port 1 on the far left, and is mapped against the calibrated values for the Boost Re-Drive Activation Voltage level.
- This voltage level (LVC_Scv_redrive_on_batt) is summed with the constant hysterisis band level at REQ-101 to determine the voltage at which Boost Re-drive is de-activated. Both these voltage levels, along with the recorded battery voltage (found via signal 11 in Figure 1), are passed to the hysteresis logic block at REQ-102.
- the role of this block is to hold the current activation state (either TRUE or FALSE) until an activation or de-activation condition is met.
- the Boost Re-drive state will remain FALSE (off) until the battery voltage level 11 falls below the activation threshold. This will in-turn be held TRUE until the de-activation condition is met (i.e., the battery voltage rises back above the de-activation threshold, set in REQ-101). This is done to prevent rapid on/off switching due to minor battery voltage fluctuations about the Boost Re-drive activation voltage.
- Boost Re-drive state is output on the far right via out-port 1.
- FIG. 1 The embodiments described above in relation to Figures 1, 9 and 10 relate to a Boost redrive control scenario that is controlled by software running on the vehicle's ECU.
- Figures 11 and 12 show circuit schematics for a hardware implementation of an injector system that uses Boost pulses.
- FIG 11 shows a circuit schematic for a typical fuel injector drive system comprising a low-side switch Q1 connected between load- and ground through a current sense resistor R1, a high-side switch Q2 connected between load+ and the cathode of series diode D1, and a boost switch Q3 connected between cathode of D1 and a boost capacitor (not shown in Figure 11) which is capable of supplying Boost voltage pulses at Vboost.
- the anode of D1 is connected to the battery supply Vbat.
- a recirculation diode D2 is connected between ground and load+.
- a third diode D3 is connected between load- and Vboost.
- a variation of this circuit may have the boost switch connected in parallel with the high-side switch. In this case the boost switch Q3 is connected between load+ and the Vboost.
- FIG. 2 a typical control logic and current waveform is shown in Figure 2 where the battery voltage is higher than the voltage necessary to provide the upper hold threshold driving current (I_hold_max).
- the actuator coil resistance has been carefully chosen so that the lower hold threshold current (I_hold_min) is always available at or above nominal battery voltage (e.g. 14V) even when the coil is at maximum operating temperature (it is noted that the resistance of the copper coil within the solenoid increases with temperature at a rate of about 40% for 100 degC rise).
- the low side switch Q1 is turned on for the duration of the pull-in and hold phases (collectively referred to as the INJ_EN pulse).
- the boost switch Q3 is only turned on during the pull-in current phase (set by the one-shot timer U6) and then remains off during the hold phase.
- the boost voltage is used to obtain a fast current rise and reduce the pull-in time.
- the high side switch Q2 gates the boost voltage (when Q3 is on) or battery voltage (when Q3 is off).
- the injector current is sensed by R1 and amplified by the op-amp U1.
- the hold current is maintained between the levels I_hold_min and I_hold_max by switching the high-side switch Q2 on and off when the current sense comparator U5 thresholds are reached.
- PWM pulse width modulation
- the comparator threshold levels in this example are selected by an analog multiplexer U7 that selects I_ peak_minimax or I_ hold_minimax current thresholds under control of the one-shot peak timer U6 and the state of the comparator PWM output.
- the AND gate U3C gates the PWM signal with the INJ_EN pulse so that Q1 and Q2 are both turned off when INJ_EN is low to give fast injector de-energisation.
- Figure 4 shows the control logic and current waveform when the battery voltage falls below that necessary to maintain the lower hold threshold driving current and the additional boost voltage pulses are being used to augment battery voltage (redrive mode).
- the boost voltage drives the current up to the upper hold threshold driving current where the boost switch Q3 is be turned off.
- the high-side switch Q2 is turned on continuously during the hold phase so that the recirculation current now flows through the battery instead of through the recirculation diode D2.
- Comparison of the voltage waveforms in Figures 2 and 4 illustrates the difference in operation.
- FIG. 12 shows a modified circuit schematic that incorporates additional logic to enable the redrive function during the hold phase.
- the additional components are shown inside the box 70.
- the AND gate U3B ensures that when the redrive control strategy is active, the high-side switch is turned off during the time the current decays from peak to hold but is turned on (via OR gate U4B) during the hold phase.
- the OR gate U4A together with the AND gate U3A steers the PWM to the Boost switch during the hold phase in redrive mode.
- a perceived disadvantage of this method is that the power rating of the DC/DC boost converter (which is used to provide the high voltage source in conjunction with the Boost capacitor) might have to be increased to handle the additional boost pulses during the hold phase. In practice this is not the case for the following reasons:
- the upper hold threshold current (I_hold_max) may be raised during redrive mode in order to limit the chopping frequency, since the current rate of rise is very fast on boost voltage. This causes a slight increase in ripple current but this is not critical during the engine starting procedure.
- the alternator will recharge the battery and quickly reach about 13.5 -14V (on a 12V system) at which point redrive will be disabled.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Fuel-Injection Apparatus (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP07018287.8A EP1903201B1 (de) | 2006-09-20 | 2007-09-18 | Strategie und Steuerung zur Ventilsteuerung |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP06254874 | 2006-09-20 | ||
| GBGB0620050.5A GB0620050D0 (en) | 2006-09-20 | 2006-10-10 | Valve control strategy and controller |
| EP07018287.8A EP1903201B1 (de) | 2006-09-20 | 2007-09-18 | Strategie und Steuerung zur Ventilsteuerung |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1903201A2 true EP1903201A2 (de) | 2008-03-26 |
| EP1903201A3 EP1903201A3 (de) | 2008-04-16 |
| EP1903201B1 EP1903201B1 (de) | 2017-04-12 |
Family
ID=38814528
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07018287.8A Active EP1903201B1 (de) | 2006-09-20 | 2007-09-18 | Strategie und Steuerung zur Ventilsteuerung |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP1903201B1 (de) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2116709A1 (de) | 2008-05-08 | 2009-11-11 | Perkins Engines Company Limited | Anzeige einer Temperaturveränderung in einer Magnetspule |
| ITRM20090441A1 (it) * | 2009-08-19 | 2011-02-20 | Diego Iodice | Comando ad attuatore lineare elettromagnetico per cambio meccanico |
| US20110266106A1 (en) * | 2008-12-26 | 2011-11-03 | Toyota Jidosha Kabushiki Kaisha | Brake control apparatus and brake control method |
| GB2487218A (en) * | 2011-01-13 | 2012-07-18 | Gm Global Tech Operations Inc | Method for driving a solenoid valve of a fuel injector |
| CN106460699A (zh) * | 2014-04-03 | 2017-02-22 | 大陆汽车有限公司 | 用于监控电磁阀的线圈线的温度的方法和装置 |
| DE102016223564A1 (de) | 2015-11-30 | 2017-06-01 | Robert Bosch Engineering and Business Solutions Ltd. | Ansteurungs- und steuerungsmodul für einen injektor und betriebsverfahren dafür |
| CN112041551A (zh) * | 2018-04-15 | 2020-12-04 | 德尔福汽车系统卢森堡有限公司 | 控制燃料喷射器的方法 |
| DE102022129326A1 (de) | 2022-11-07 | 2024-05-08 | Schaeffler Technologies AG & Co. KG | Verfahren zum Betrieb eines Aktorelements und Aktorelement |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4328606A1 (de) * | 2022-08-25 | 2024-02-28 | Siemens Schweiz AG | Kontinuierliche impedanz- und/oder widerstandsmessungen |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050047053A1 (en) | 2003-07-17 | 2005-03-03 | Meyer William D. | Inductive load driver circuit and system |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5424637A (en) * | 1993-03-15 | 1995-06-13 | Caterpillar Inc. | Method and apparatus for determining the position of an armature in an electromagnetic actuator using observer theory |
| DE10011924A1 (de) * | 2000-03-11 | 2001-09-13 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Ansteuerung eines Magnetventils zur Kraftstoffeinspritzung |
| DE10014228A1 (de) * | 2000-03-22 | 2001-09-27 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Ansteuerung eines Kraftstoffeinspritzventils |
| JP3776688B2 (ja) * | 2000-07-21 | 2006-05-17 | 株式会社日立製作所 | インジェクタ駆動回路 |
| GB0206259D0 (en) * | 2002-03-16 | 2002-05-01 | Delphi Tech Inc | Control method for injection using function map |
| ITTO20030609A1 (it) * | 2003-08-05 | 2005-02-06 | Fiat Ricerche | Metodo di funzionamento di un dispositivo di comando di elettroattuatori induttivi. |
-
2007
- 2007-09-18 EP EP07018287.8A patent/EP1903201B1/de active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050047053A1 (en) | 2003-07-17 | 2005-03-03 | Meyer William D. | Inductive load driver circuit and system |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2116709A1 (de) | 2008-05-08 | 2009-11-11 | Perkins Engines Company Limited | Anzeige einer Temperaturveränderung in einer Magnetspule |
| EP2146080A1 (de) | 2008-05-08 | 2010-01-20 | Perkins Engines Company Limited | Temperaturänderungsanzeige für einen Elektromagneten |
| CN102264585B (zh) * | 2008-12-26 | 2014-05-07 | 丰田自动车株式会社 | 制动控制设备和制动控制方法 |
| US20110266106A1 (en) * | 2008-12-26 | 2011-11-03 | Toyota Jidosha Kabushiki Kaisha | Brake control apparatus and brake control method |
| CN102264585A (zh) * | 2008-12-26 | 2011-11-30 | 丰田自动车株式会社 | 制动控制设备和制动控制方法 |
| ITRM20090441A1 (it) * | 2009-08-19 | 2011-02-20 | Diego Iodice | Comando ad attuatore lineare elettromagnetico per cambio meccanico |
| GB2487218A (en) * | 2011-01-13 | 2012-07-18 | Gm Global Tech Operations Inc | Method for driving a solenoid valve of a fuel injector |
| CN106460699A (zh) * | 2014-04-03 | 2017-02-22 | 大陆汽车有限公司 | 用于监控电磁阀的线圈线的温度的方法和装置 |
| US10280861B2 (en) | 2014-04-03 | 2019-05-07 | Cpt Group Gmbh | Method and apparatus for monitoring the temperature of the coil wire of a solenoid valve |
| DE102016223564A1 (de) | 2015-11-30 | 2017-06-01 | Robert Bosch Engineering and Business Solutions Ltd. | Ansteurungs- und steuerungsmodul für einen injektor und betriebsverfahren dafür |
| CN112041551A (zh) * | 2018-04-15 | 2020-12-04 | 德尔福汽车系统卢森堡有限公司 | 控制燃料喷射器的方法 |
| CN112041551B (zh) * | 2018-04-15 | 2022-11-08 | 德尔福汽车系统卢森堡有限公司 | 控制燃料喷射器的方法 |
| DE102022129326A1 (de) | 2022-11-07 | 2024-05-08 | Schaeffler Technologies AG & Co. KG | Verfahren zum Betrieb eines Aktorelements und Aktorelement |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1903201A3 (de) | 2008-04-16 |
| EP1903201B1 (de) | 2017-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1903201B1 (de) | Strategie und Steuerung zur Ventilsteuerung | |
| US5992391A (en) | Electromagnetic fuel injector and control method thereof | |
| US10634084B2 (en) | Fuel injection controller and fuel injection system | |
| US9228521B2 (en) | Fuel injection controller and fuel-injection-control system | |
| US5975057A (en) | Fuel injector control circuit and system with boost and battery switching, and method therefor | |
| JP3697272B2 (ja) | 電磁負荷を駆動する方法と装置 | |
| GB2487218A (en) | Method for driving a solenoid valve of a fuel injector | |
| EP1473453B1 (de) | Vorrichtung zur Steuerung eines Injektors in einer Brennkraftmaschine | |
| JP4456285B2 (ja) | 燃料噴射弁駆動装置 | |
| JP2002021679A (ja) | 燃料噴射装置及び内燃機関 | |
| EP1528243B1 (de) | Verfahren zur Steuerung eines Einspritzventils mit Überprüfung der Nadelbewegung | |
| KR101836151B1 (ko) | 인젝터로 적용되는 솔레노이드 밸브 고장 진단 방법 및 그 장치 | |
| US8989994B2 (en) | System and method for fault diagnosis in fuel injection system | |
| US9194345B2 (en) | Fuel injection device | |
| EP2045459A1 (de) | Verfahren zum Steuern einer Kraftstoffeinspritzvorrichtung | |
| EP1669577B1 (de) | Treiber für induktive Lasten mit Überstromerfassung | |
| WO2004102600A1 (en) | A method of controlling the operation of a solenoid | |
| JP6411918B2 (ja) | ハイブリッド自動車 | |
| JP6844501B2 (ja) | 燃料噴射弁の制御装置、及び燃料噴射弁の制御方法 | |
| EP1179669B1 (de) | Verfahren zur Regelung eines Einspritzventils in einer Brennkraftmaschine | |
| EP1818527B1 (de) | Verfahren und Vorrichtung zum Sperren/Drosseln von stromgesteuerten Brennstoffeinspritzdüsen in einem endothermen Motor für verschiedene Brennstoffe | |
| JP2002295293A (ja) | 燃料噴射装置 | |
| JP6483547B2 (ja) | 内燃機関の制御装置 | |
| US6292036B1 (en) | Drive circuit | |
| GB2463024A (en) | A method for controlling an actuator using MOSFETs |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK RS |
|
| 17P | Request for examination filed |
Effective date: 20080422 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: DELPHI TECHNOLOGIES HOLDING S.A.R.L. |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: DELPHI INTERNATIONAL OPERATIONS LUXEMBOURG S.A.R.L |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20161107 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 884147 Country of ref document: AT Kind code of ref document: T Effective date: 20170515 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602007050543 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20170412 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 884147 Country of ref document: AT Kind code of ref document: T Effective date: 20170412 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170713 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170712 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170812 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602007050543 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20180115 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170918 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170918 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 12 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170918 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 602007050543 Country of ref document: DE Owner name: DELPHI TECHNOLOGIES IP LIMITED, BB Free format text: FORMER OWNER: DELPHI INTERNATIONAL OPERATIONS LUXEMBOURG S.A R.L., BASCHARAGE, LU |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: 732E Free format text: REGISTERED BETWEEN 20190222 AND 20190227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20070918 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170412 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170412 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20200925 Year of fee payment: 14 Ref country code: DE Payment date: 20200929 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20200923 Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602007050543 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210930 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220401 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210918 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230327 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20240808 Year of fee payment: 18 |