EP1844931B1 - Machine d'impression par sérigraphie - Google Patents
Machine d'impression par sérigraphie Download PDFInfo
- Publication number
- EP1844931B1 EP1844931B1 EP07290393A EP07290393A EP1844931B1 EP 1844931 B1 EP1844931 B1 EP 1844931B1 EP 07290393 A EP07290393 A EP 07290393A EP 07290393 A EP07290393 A EP 07290393A EP 1844931 B1 EP1844931 B1 EP 1844931B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- support
- frame
- relative
- machine according
- fixed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
- 238000007650 screen-printing Methods 0.000 title description 11
- 230000008878 coupling Effects 0.000 claims description 27
- 238000010168 coupling process Methods 0.000 claims description 27
- 238000005859 coupling reaction Methods 0.000 claims description 27
- 238000007639 printing Methods 0.000 claims description 24
- 230000000712 assembly Effects 0.000 claims description 20
- 238000000429 assembly Methods 0.000 claims description 20
- 238000006073 displacement reaction Methods 0.000 claims description 17
- 230000006870 function Effects 0.000 description 2
- 230000002950 deficient Effects 0.000 description 1
- 210000002414 leg Anatomy 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 210000004417 patella Anatomy 0.000 description 1
- 239000011800 void material Substances 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F15/00—Screen printers
- B41F15/08—Machines
- B41F15/0804—Machines for printing sheets
- B41F15/0813—Machines for printing sheets with flat screens
- B41F15/0818—Machines for printing sheets with flat screens with a stationary screen and a moving squeegee
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F15/00—Screen printers
- B41F15/14—Details
- B41F15/16—Printing tables
- B41F15/18—Supports for workpieces
- B41F15/26—Supports for workpieces for articles with flat surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F15/00—Screen printers
- B41F15/14—Details
- B41F15/34—Screens, Frames; Holders therefor
- B41F15/36—Screens, Frames; Holders therefor flat
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41P—INDEXING SCHEME RELATING TO PRINTING, LINING MACHINES, TYPEWRITERS, AND TO STAMPS
- B41P2215/00—Screen printing machines
- B41P2215/10—Screen printing machines characterised by their constructional features
- B41P2215/11—Registering devices
- B41P2215/112—Registering devices with means for displacing the frame
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41P—INDEXING SCHEME RELATING TO PRINTING, LINING MACHINES, TYPEWRITERS, AND TO STAMPS
- B41P2215/00—Screen printing machines
- B41P2215/10—Screen printing machines characterised by their constructional features
- B41P2215/11—Registering devices
- B41P2215/114—Registering devices with means for displacing the article
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41P—INDEXING SCHEME RELATING TO PRINTING, LINING MACHINES, TYPEWRITERS, AND TO STAMPS
- B41P2215/00—Screen printing machines
- B41P2215/50—Screen printing machines for particular purposes
- B41P2215/55—Screen printing machines for particular purposes for printing compact discs
Definitions
- the invention generally relates to screen printing machines.
- the invention relates to a screen printing machine of the aforementioned type, characterized in that the movable member of each coupling assembly is connected to the support by the slide connection means in a fixed direction relative to the support.
- the machine represented on the figure 1 is intended for silk screen printing of flat objects, such as compact discs, telephone cards or solar cells.
- the Conveyor 10 It comprises a supply conveyor 4 of objects to be printed 6, a printing unit 8, a conveyor for evacuating 10 correctly printed objects and an evacuation conveyor 12 for poorly printed or defective objects extending perpendicular to the Conveyor 10.
- the conveyors 4, 10 and 12 are similar and each comprise a frame 14 and a conveyor belt 16 circulating in a loop between two parallel rollers.
- the machine also comprises a storage tray 18, arranged next to the supply conveyor 4, able to receive in stack the objects 6 to be printed when the printing machine does not work.
- the printing unit 8 comprises a turntable 20 located between the supply and discharge conveyors 4 and 10, and a printing station 22 located at least partially above the turntable.
- the turntable 20 is motorized and comprises a fixed frame 24, and a circular plate 26, carried by the frame 24.
- the plate 26 is rotatable relative to the frame 24 about a vertical axis Z.
- the upper face of the plate 26 has three zones 28 for receiving and supporting an object 6, regularly distributed around the Z axis.
- the zones 28 are located first facing the supply conveyor 4, a second facing the evacuation conveyor 10 and a third under the printing station 22.
- the first zone 28 is a receiving zone of an object 6 to be printed, brought from the conveyor 4.
- the second zone 28 is a support zone of the object 6 after printing at the station 22, waiting for evacuation to the conveyor 10 or 12.
- the third zone 28 is a support zone of the object 6 during its printing at the station 22.
- the machine further comprises a feed bracket 30, capable of grasping an element 6 located at the end of the supply conveyor 4, and transferring it either to the storage tray 18 or to the receiving area 28 of the tray 26 .
- the machine also comprises an exhaust bracket 31, capable of grasping an object 6 disposed in the area 28 of the tray 26 for supporting printed objects, and transferring it to the evacuation conveyor 10, or to the evacuation conveyor 12.
- the frame 24 also comprises two vertical support columns 32 of the printing station 22.
- the columns 32 are fixed and stand near the plate 26, slightly away from it.
- the printing station 22 comprises a substantially horizontal support 34, a screen-printing screen 36 fixed to the support 34, and a squeegee and counter-doctor device 38 movably mounted on the support 34.
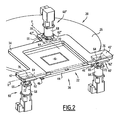
- the support 34 ( figures 2 and 3 ) has a general U-shape with three rectilinear branches of equal length. It delimits a central void 40.
- the support 34 also comprises three tabs 42, 42 'and 42 "substantially square, integral with the three branches of the support 34.
- the tabs 42 and 42' extend towards the outside of the support, from the two free ends thereof, the third leg 42 "extends outwardly from the central branch.
- the tabs 42, 42 'and 42 "extend in the plane of the support 34.
- the screen 36 comprises a rigid square frame 44, and a mesh, not shown, stretched in the center of the frame 44.
- This mesh consists of threads, for example silk threads, arranged according to the pattern to be printed on the objects 6.
- the sides of the frame 44 have a length substantially equal to that of the branches of the support 34.
- the printing station 22 also comprises two brackets 46 forming flanges of the frame 44 on a lower face of the support 34.
- the brackets 46 are arranged under the two parallel and opposite branches of the support 34.
- the support 34 is located cantilevered above the turntable 26, so that the screen 36 is immediately above the area 28 supporting the object to be printed.
- the scraper device 38 comprises two scrapers 48, a carriage 50 carrying the scrapers 48, means not shown for moving the carriage 50 in a horizontal plane relative to the support 34, and a jack 52 able to move the scrapers 48 vertically relative to each other. to the cart 50.
- the printing station 8 also comprises means for moving the support 34 relative to the frame 24, vertically and in a horizontal plane of movement.
- the means for moving the support 34 relative to the frame 24 in the vertical direction comprise two cylinders (not shown) mounted on the columns 32.
- the means for moving the support 34 horizontally will be described later.
- the machine 2 comprises a set of cameras and detectors 56 and a central unit 58 able to control the whole of the machine according to at least information provided by the cameras and the detectors 56.
- the objects to be printed 6 are arranged one behind the other on the supply conveyor 4.
- the bracket 30 grasps the object 6 disposed at the end of the conveyor 4 closest to the plate 26, and the transfer in the zone 28 closest to the conveyor 4.
- the stem 31 grasps the object 6 that has just been printed at the printing station 22, and the transfer on the evacuation conveyor 10. This object is initially in the area 28 of the plate 26 closest to the conveyor 10.
- the object 6 in the third zone 28, under the support 34 is printed.
- the support 34 is first lowered so as to bring the screen 36 immediately. above object 6 to print. Then, with the help of the means for moving the support in the horizontal plane of deflection, the position of the screen 36 is precisely adjusted with respect to the object 6.
- the cylinders 52 then move the squeegees 48 downwards, such that the squeegees mesh the mesh of the screen 36 against the object 6.
- the carriage 50 then moves relative to the support 34, so that the squeegees 48 scan the mesh 36 while holding it pressed against the object 6, thus realizing on it the impression of the pattern defined by the mesh.
- the doctor blades 48 are then raised by the jacks 52, and the carriage 50 returns to its initial position.
- the support 34 is moved upwards relative to the plate 26.
- the plate 26 is then rotated by 120 °, so as to bring the zone 28 carrying the newly printed object 6 close to the evacuation conveyor. This same movement brings the zone 28 carrying the newly deposited object 6 onto the plate 26 under the printing unit 22.
- the means for moving the support 34 relative to the frame 24 comprise three coupling assemblies 60, 60 ', 60 "of the same type
- the assemblies 60, 60', 60" each comprise a slide, respectively 62, 62 ', 62 " rigidly fixed respectively under the tabs 42, 42 ', 42 “of the support. They also each comprise a mobile carriage 64 guided by the slide 62, 62 ', 62 "in a direction fixed relative to the support 34, and parallel to the horizontal plane of travel. also motorized means 66 for moving the carriage 64 relative to the frame 24.
- the displacement means 66 of each coupling assembly comprise a motor 68, a vertical output shaft 70 rotated by the motor 68, and a crank 72 fixed to the output shaft 70 (see FIG. figure 5 ).
- the crank 72 comprises an eccentric rod 74, offset horizontally relative to the shaft 70 and extending vertically beyond this shaft by a section 76.
- the section 76 is mounted on the carriage 64 by a ball joint.
- the patella occupies substantially the center of the carriage 64.
- the slides 60 and 60 'of the tabs 42 and 42' guide the carriages 64 in aligned directions.
- the slide 60 "of the third subassembly guides the corresponding carriage in a direction perpendicular to that of the two other rails 60 and 60 '.
- the three coupling subassemblies are distributed at the periphery of the support 34.
- the movable members 64 of the three subassemblies are inscribed at each moment in a circle C materialized on the figure 3 , this circle C being defined as that which passes through the connecting ball joints of each of the carriages 64.
- the center G of the circle C is at each moment located in the space 40.
- the carriages 64 are arranged around the center G so as to separated from each other by angles between 90 ° and 150 °.
- the motorized means 66 of the coupling assemblies 60 and 60 ' are arranged under the support 34, as shown in FIG. figure 2 . More specifically, they are interposed between the upper end of the columns 32 and the lower face of the tabs 42 and 42 '.
- the motorized means 66 of the third coupling assembly 60 "are disposed above the support 34, as shown in FIG. figure 2 . They are fixed to a bracket not shown, fixed relative to the frame 24. This bracket is taken for example on the columns 32.
- the tab 42 "is pierced at its center by a square hole 78.
- the slides 62" of all 60 “are fixed under the tab 42", on either side of the orifice 78. They extend parallel to two opposite edges of the square orifice 78.
- the carriage 64 is located immediately below the orifice 78.
- the motor 68 is, meanwhile, located above the orifice 78, the crank 72 being engaged in the orifice.
- the size of the orifice 78 is sufficient to allow the crank 72 to debate in rotation about the axis 70 of the engine.
- the motors 68 of the three coupling assemblies 60, 60 ', 60 are micrometer motors controlled by the computer 58. They make it possible to obtain a very high precision for the positioning of the carriages 64.
- the plate 26 then pivots about its axis Z, so as to bring the element 6 under the printing station 22.
- the computer 58 according to the information received from the camera 56, will control the motors 68 of the three sets of coupling 60, 60 'and 60 ", so as to precisely adjust the position of the screen 36 in three degrees of freedom with respect to the element 6.
- These three degrees of freedom are the translation of the screen 36 in the direction X corresponding to the direction of movement of the two carriages 64 aligned sets 60 and 60 ', the translation of the screen 36 in the direction Y corresponding to the direction the movement of the carriage of the third assembly 60 ", and a rotation of the screen 36 about an axis perpendicular to the horizontal plane of movement of the support.
- the movements authorized by these three degrees of freedom allow to obtain all possible positions of the screen 36 with respect to the element 6 defined by the deflections of the carriages, conversely, there is only one possible combination of positions for the carriages 64 which makes it possible to obtain the desired position for the screen 36 by report to element 6 to print.
- This combination of positions is determined by the computer 58, using mathematical equations stored in its memory, from the information provided by the camera 56.
- the computer 58 controls the rotational movement of the cranks 72, via the motors 68.
- the rotational movement of the crank 72 causes a translation of the carriage 64 corresponding in the X direction relative to the slideways 62, and also causes a displacement of the tab 42 along the Y axis.
- the displacement of the crank 72 of the assembly 60 'causes the displacement of the corresponding carriage 64 in the direction X and the displacement of the corresponding tab 42' in the direction Y.
- the movement of the crank 72 of the third together 60 "causes the displacement of the carriage 74 corresponding in the direction Y and the displacement of the corresponding tab 42" in the direction X.
- the computer 58 activates the cylinders to lower the screen closer to the element 6 to print, and causes the displacement of the doctor blades.
- the slides 62, 62 'and 62 are rigidly fixed on an upper face of the support 34, on the tabs 42, 42', 42". These slides guide the trolleys 64 in the same directions X and Y as in the first embodiment.
- the motors 68 are arranged above the support 34, and are rigidly fixed to a fixed structure relative to the frame 24, this structure not being shown for clarity.
- the motorized means for moving the carriage 64 of the assembly 60 are shown in greater detail on the Figures 7 and 8 . They comprise an intermediate carriage 80 disposed above the carriage 64, an endless screw 82 arranged in the extension of the drive shaft 70, a coupling 84 which rotatably secures the worm 82 and the shaft 70, a bearing 86 for guiding rotation of the screw 82, and a nut 88 rigidly fixed to the intermediate carriage 80.
- the worm 82 is engaged in the threaded hole of the nut 88.
- the motorized means 60 also comprise intermediate guides 90 for guiding of the intermediate carriage 80. These intermediate rails 90 and the bearing 86 are rigidly fixed to the support structure of the motors 68.
- the slideways 90 guide the intermediate carriages 80 in the Y direction.
- the motor shaft 70 and the worm 82 also extend in the Y direction.
- the intermediate slideways 90 guide the intermediate carriage 80 in the direction X.
- the output shaft 70 and the worm 82 therefore extend along the same direction X.
- the computer 58 controls the rotational drive of the worm 82, through the motors 68, the intermediate carriages 80 thus being driven in translation.
- the carriage 64 is articulated to the intermediate carriage 80 about an axis 92 extending perpendicularly to the two carriages.
- This axis 92 is rigidly fixed to the center of the carriage 80 and is connected by a ball joint connection to the center of the carriage 64.
- the printing machine described above has many advantages.
- the means of displacement of the screen support 34 relative to the frame in its plane of movement are mechanically particularly simple.
- the support is moved by three coupling assemblies comprising motorized carriages and sliding connection means between the carriages and the support. These three assemblies are controlled by a computer in a coordinated manner, which allows to freely adjust the position and the orientation of the screen printing with respect to the element to be printed, quickly and accurately.
- the means for moving the support have a particularly small footprint.
- the displacement motors of the carriages are small, and the means for driving the support (slides, carriage, means for driving the carriage by the motor) are compact, both in the first embodiment and in the second embodiment.
- the machine described above can have multiple variants.
- the three slides and the corresponding carriages can be arranged in the same plane.
- the slides can also be arranged in planes parallel to the plane of movement, but different from each other.
- the arrangement of the coupling assemblies at the periphery of the support is chosen so as to facilitate the guiding of the support by coordinated movement of the carriages. It is advantageous in this perspective to have one of the three sets along each branch of the support.
- the carriages thus fit into a circle whose center G is located in the central space of the support, which makes the guidance of the support easier and more accurate. It should be noted that the movements of the carriages are of small magnitudes with regard to the size of the support, so that the center G of the circle remains at each moment in the central space.
- two of the three carriages can be guided by the slides in aligned directions, the third carriage being guided in a direction perpendicular to the previous one.
- This arrangement is particularly advantageous because the mathematical equations allowing the computer to determine the position sought for the screen and the trajectory for each carriage to reach this position are particularly simple.
- the motorized means for moving the carriages may include other types of means for driving the carriage by the motor than those described above.
- These drive means may be of the rack and pinion type or the pivoting lever type.
- the three coupling assemblies can comprise different drive means, one of the coupling assemblies comprising for example means for driving the carriage by crank, and the other two by worm.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Screen Printers (AREA)
Description
- L'invention concerne en général les machines de sérigraphie.
- Plus précisément, l'invention concerne une machine d'impression par sérigraphie, du type comprenant :
- un bâti ;
- au moins un poste d'impression comprenant un support apte à recevoir un écran de sérigraphie sur lequel est déposé un motif à imprimer ;
- des moyens de déplacement du support par rapport au bâti dans un plan de débattement,
- trois ensembles de couplage pourvus chacun d'un organe mobile par rapport au bâti, de moyens de liaison glissière de l'organe mobile suivant une direction fixe et parallèle au plan de débattement, et de moyens motorisés de déplacement de l'organe mobile par rapport au bâti, deux au moins des trois directions fixes se croisant, et
- des moyens de pilotage des moyens de déplacement motorisés des trois ensembles indépendamment les uns des autres.
- Une telle machine est connue du brevet
US-5,901,646 ou dubrevet EP-A-0 502 239 , qui décrit que les organes mobiles sont des chariots liés au bâti par les moyens de liaison glissière selon une direction fixe par rapport au bâti. - Dans ce but, l'invention porte sur une machine d'impression par sérigraphie du type précité, caractérisé en ce que l'organe mobile de chaque ensemble de couplage est lié au support par les moyens de liaison glissière suivant une direction fixe par rapport au support.
- La machine peut également comporter une ou plusieurs des caractéristiques ci-dessous, considérées individuellement ou selon toutes les combinaisons techniquement possibles :
- deux des trois directions fixes sont parallèles entre elles, la troisième direction fixe étant perpendiculaire aux deux autres directions fixes ;
- deux des trois directions fixes sont alignées ;
- les moyens de déplacement motorisés des trois ensembles comprennent chacun un organe moteur et un actionneur susceptible d'être entraîné par l'organe moteur en déplacement par rapport au bâti parallèlement au plan de débattement, l'actionneur étant lié par une articulation à l'organe mobile ;
- l'actionneur est susceptible d'être entraîné en rotation par rapport au bâti par l'organe moteur ;
- l'actionneur est une manivelle comprenant une tige excentrique liée à l'organe mobile ;
- l'actionneur est susceptible d'être entraîné en translation par rapport au bâti par l'organe moteur ;
- l'actionneur est guidé par des glissières en translation par rapport au bâti suivant une direction sensiblement perpendiculaire à la direction fixe des moyens de liaison glissière du même ensemble ;
- les trois ensembles de couplage sont répartis à la périphérie du support ;
- considérés suivant une direction perpendiculaire au plan de débattement, les organes mobiles des ensembles s'inscrivent à chaque instant dans un cercle présentant un centre situé dans une partie centrale du support ; et
- le support est un cadre délimitant un espace central dans lequel est fixé l'écran de sérigraphie, le centre du cercle, considéré suivant une direction perpendiculaire au plan de débattement, étant situé dans l'espace central ;
- D'autres caractéristiques et avantages de l'invention ressortiront de la description détaillée qui en est donnée ci-dessous, à titre indicatif et nullement limitatif, en référence aux figures annexées, parmi lesquelles :
- la
figure 1 est une vue générale en perspective d'une machine d'impression par sérigraphie conforme à l'invention ; - la
figure 2 est une vue en perspective du support d'écran et des ensembles de couplage de la machine de lafigure 1 , pour un premier mode de réalisation de l'invention ; - la
figure 3 est une vue de dessous du support de lafigure 2 ; - la
figure 4 est une vue en perspective d'un ensemble de couplage de lafigure 2 ; - la
figure 5 est une vue en coupe axiale de l'ensemble de couplage de lafigure 4 , considérée suivant l'incidence des flèches V ; - la
figure 6 est une vue en perspective du support et des ensembles de couplage d'une machine selon un second mode de réalisation de l'invention ; - la
figure 7 est une vue latérale d'un ensemble de couplage de lafigure 6 ; et - la
figure 8 est une vue en coupe axiale de l'ensemble de couplage de lafigure 7 . - La machine représentée sur la
figure 1 est destinée à l'impression par sérigraphie d'objets plats, tels que des compacts-disques, des cartes téléphoniques ou des cellules solaires. - Elle comprend un convoyeur d'amenée 4 d'objets à imprimer 6, une unité d'impression 8, un convoyeur d'évacuation 10 des objets correctement imprimés et un convoyeur d'évacuation 12 des objets mal imprimés ou défectueux s'étendant perpendiculairement au convoyeur 10. Les convoyeurs 4, 10 et 12 sont similaires et comportent chacun un châssis 14 et une bande transporteuse 16 circulant en boucle entre deux rouleaux parallèles. La machine comprend également un plateau de stockage 18, disposé à côté du convoyeur d'amenée 4, apte à recevoir en pile les objets 6 à imprimer lorsque la machine d'impression ne fonctionne pas.
- L'unité d'impression 8 comprend une table tournante 20 située entre les convoyeurs d'amenée 4 et d'évacuation 10, et un poste d'impression 22 situé au moins partiellement au-dessus du plateau tournant. La table tournante 20 est motorisée et comprend un bâti 24 fixe, et un plateau circulaire 26, porté par le bâti 24. Le plateau 26 est mobile en rotation par rapport au bâti 24 autour d'un axe vertical Z. La face supérieure du plateau 26 présente trois zones 28 de réception et de support d'un objet 6, régulièrement réparties autour de l'axe Z.
- Les zones 28 sont situées une première en regard du convoyeur d'amenée 4, une seconde en regard du convoyeur d'évacuation 10 et une troisième sous le poste d'impression 22.
- La première zone 28 est une zone de réception d'un objet 6 à imprimer, amené depuis le convoyeur 4.
- La seconde zone 28 est une zone de support de l'objet 6 après son impression au poste 22, en attente d'évacuation vers le convoyeur 10 ou 12.
- La troisième zone 28 est une zone de support de l'objet 6 pendant son impression au poste 22.
- La machine comprend par ailleurs une potence d'amenée 30, apte à saisir un élément 6 situé au bout du convoyeur d'amenée 4, et à le transférer soit sur le plateau de stockage 18, soit sur la zone 28 de réception du plateau 26.
- La machine comprend également une potence d'évacuation 31, apte à saisir un objet 6 disposé dans la zone 28 du plateau 26 de support des objets imprimés, et à le transférer sur le convoyeur d'évacuation 10, ou sur le convoyeur d'évacuation 12.
- Le bâti 24 comprend également deux colonnes verticales 32 de support du poste d'impression 22. Les colonnes 32 sont fixes et se dressent à proximité du plateau 26, légèrement à l'écart de celui-ci.
- Le poste d'impression 22 comprend un support 34 sensiblement horizontal, un écran de sérigraphie 36 fixé au support 34, et un dispositif de racle et contre-racle 38 monté mobile sur le support 34. Le support 34 (
figures 2 et3 ) présente une forme générale en U à trois branches rectilignes de longueurs égales. Il délimite un vide central 40. Le support 34 comprend également trois pattes 42, 42' et 42" sensiblement carrées, solidaires des trois branches du support 34. Les pattes 42 et 42' s'étendent vers l'extérieur du support, à partir des deux extrémités libres de celui-ci. La troisième patte 42" s'étend vers l'extérieur du support à partir de la branche centrale. Les pattes 42, 42' et 42" s'étendent dans le plan du support 34. - L'écran 36 comprend un cadre carré rigide 44, et un maillage, non représenté, tendu au centre du cadre 44. Ce maillage est constitué de fils, par exemple de fils de soie, disposés selon le motif à imprimer sur les objets 6. Les côtés du cadre 44 présente une longueur sensiblement égale à celle des branches du support 34.
- Le poste d'impression 22 comprend également deux cornières 46 formant brides de fixation du cadre 44 sur une face inférieure du support 34. Les cornières 46 sont disposées sous les deux branches parallèles et opposées du support 34.
- Le support 34 est situé en porte-à-faux, au-dessus du plateau tournant 26, de façon à ce que l'écran 36 se trouve immédiatement au-dessus de la zone 28 supportant l'objet à imprimer.
- Le dispositif de raclage 38 comprend deux racles 48, un chariot 50 portant les racles 48, des moyens non représentés pour déplacer le chariot 50 dans un plan horizontal par rapport au support 34, et un vérin 52 apte à déplacer verticalement les racles 48 par rapport au chariot 50.
- Le poste d'impression 8 comprend également des moyens de déplacement du support 34 par rapport au bâti 24, verticalement et dans un plan de débattement horizontal.
- Les moyens pour déplacer le support 34 par rapport au bâti 24 suivant la direction verticale comprennent deux vérins (non représentés) montés sur les colonnes 32. Les moyens pour déplacer le support 34 horizontalement seront décrits plus loin.
- La machine 2 comprend un ensemble de caméras et de détecteurs 56 et une unité centrale 58 apte à piloter l'ensemble de la machine en fonction au moins des informations fournies par les caméras et les détecteurs 56.
- On va brièvement décrire ci-dessous le fonctionnement de la machine d'impression 2.
- Les objets à imprimer 6 sont disposés les uns derrière les autres sur le convoyeur d'amenée 4. La potence 30 saisit l'objet 6 disposé à l'extrémité du convoyeur 4 la plus proche du plateau 26, et le transfert dans la zone 28 la plus proche du convoyeur 4.
- Simultanément, la potence 31 saisit l'objet 6 qui vient d'être imprimé au poste d'impression 22, et le transfert sur le convoyeur d'évacuation 10. Cet objet se trouve initialement dans la zone 28 du plateau 26 la plus proche du convoyeur 10.
- De manière également simultanée, on réalise l'impression de l'objet 6 qui se trouve dans la troisième zone 28, sous le support 34. A cet effet, le support 34 est d'abord abaissé de façon à amener l'écran 36 immédiatement au-dessus de l'objet 6 à imprimer. Puis, à l'aide des moyens de déplacement du support dans le plan horizontal de débattement, on ajuste précisément la position de l'écran 36 par rapport à l'objet 6.
- Les vérins 52 déplacent ensuite les racles 48 vers le bas, de telle sorte que ces racles plaquent le maillage de l'écran 36 contre l'objet 6. Le chariot 50 se déplace alors par rapport au support 34, de telle sorte que les racles 48 balaient le maillage 36 tout en le maintenant plaqué contre l'objet 6, réalisant ainsi sur celui-ci l'impression du motif défini par le maillage. Les racles 48 sont ensuite relevées par les vérins 52, et le chariot 50 revient à sa position initiale. Le support 34 est quant à lui déplacé vers le haut par rapport au plateau 26. On fait ensuite tourner le plateau 26 de 120°, de façon à amener la zone 28 portant l'objet 6 nouvellement imprimé à proximité du convoyeur d'évacuation. Ce même mouvement amène la zone 28 portant l'objet 6 nouvellement déposé sur le plateau 26 sous l'unité d'impression 22.
- On va maintenant décrire dans le détail les moyens de déplacement du support 34 par rapport au bâti 24 dans le plan horizontal. Ces moyens ont pour fonction d'ajuster précisément la position de l'écran 36 par rapport à l'objet 6 à imprimer, en fonction de données fournies par la caméra 56 disposée au-dessus de la zone 28 la plus proche du convoyeur d'amenée 4. Cette caméra 56 est en effet apte à détecter la position précise de l'objet 6 déposé sur cette zone par la potence 30, le calculateur 58 calculant, en fonction de ces données, la position que doit occuper le support d'écran 34 lors de l'impression.
- Les moyens de déplacement du support 34 par rapport au bâti 24 comprennent trois ensembles de couplage 60, 60', 60" du même type. Les ensembles 60, 60', 60" comportent chacun une glissière, respectivement 62, 62', 62" rigidement fixée respectivement sous les pattes 42, 42', 42" du support. Ils comprennent également chacun un chariot mobile 64 guidé par la glissière 62, 62', 62" suivant une direction fixe par rapport au support 34, et parallèle au plan de débattement horizontal. Chaque ensemble comprend également des moyens motorisés 66 de déplacement du chariot 64 par rapport au bâti 24.
- Dans un premier mode de réalisation de l'invention, représenté sur les
figures 2 à 5 , les moyens de déplacement 66 de chaque ensemble de couplage comprennent un moteur 68, un arbre de sortie 70 vertical entraîné en rotation par le moteur 68, et une manivelle 72 fixée sur l'arbre de sortie 70 (voirfigure 5 ). La manivelle 72 comprend une tige excentrique 74, décalée horizontalement par rapport à l'arbre 70 et se prolongeant verticalement au-delà de cet arbre par un tronçon 76. Le tronçon 76 est monté sur le chariot 64 par une liaison rotule. La rotule occupe sensiblement le centre du chariot 64. - Comme on le voit sur la
figure 2 , les glissières 60 et 60' des pattes 42 et 42' guident les chariots 64 dans des directions alignées. La glissière 60" du troisième sous-ensemble guide le chariot correspondant dans une direction perpendiculaire à celle des deux autres glissières 60 et 60'. - Comme le montre la
figure 3 , les trois sous-ensembles de couplage sont répartis à la périphérie du support 34. Considérés suivant une direction perpendiculaire au plan de débattement, les organes mobiles 64 des trois sous-ensembles s'inscrivent à chaque instant dans un cercle C matérialisé sur lafigure 3 , ce cercle C étant défini comme celui qui passe par les rotules de liaison de chacun des chariots 64. Le centre G du cercle C est à chaque instant situé dans l'espace 40. Les chariots 64 sont disposés autour du centre G de façon à être séparés les uns des autres par des angles compris entre 90° et 150°. - Les moyens motorisés 66 des ensembles de couplage 60 et 60' sont disposés sous le support 34, comme le montre la
figure 2 . Plus précisément, ils sont interposés entre l'extrémité supérieure des colonnes 32 et la face inférieure des pattes 42 et 42'. - Au contraire, les moyens motorisés 66 du troisième ensemble de couplage 60" sont disposés au-dessus du support 34, comme le montre la
figure 2 . Ils sont fixés à une potence non représentée, fixe par rapport au bâti 24. Cette potence se reprend par exemple sur les colonnes 32. La patte 42" est percée en son centre par un orifice carré 78. Les glissières 62" de l'ensemble 60" sont fixées sous la patte 42", de part et d'autre de l'orifice 78. Elles s'étendent parallèlement à deux bords opposés de l'orifice carré 78. Le chariot 64 est situé immédiatement sous l'orifice 78. Le moteur 68 est, quant à lui, situé au-dessus de l'orifice 78, la manivelle 72 étant engagée dans l'orifice. La taille de l'orifice 78 est suffisante pour permettre à la manivelle 72 de débattre en rotation autour de l'axe 70 du moteur. - Les moteurs 68 des trois ensembles de couplage 60, 60', 60" sont des moteurs micrométriques pilotés par le calculateur 58. Ils permettent d'obtenir une précision très élevée pour le positionnement des chariots 64.
- On va maintenant décrire dans le détail le fonctionnement des moyens de déplacement du support 34.
- Après que l'élément 6 a été déposé dans la zone 28 du plateau 26 par la potence 30, sa position précise est évaluée à l'aide de la caméra 56 située au-dessus de la zone 28, qui transmet les informations au calculateur 58.
- Le plateau 26 pivote ensuite autour de son axe Z, de façon à amener l'élément 6 sous le poste d'impression 22. Le calculateur 58, en fonction des informations reçues de la caméra 56, va commander les moteurs 68 des trois ensembles de couplage 60, 60' et 60", de façon à ajuster précisément la position de l'écran 36 selon trois degrés de liberté par rapport à l'élément 6.
- Ces trois degrés de liberté sont la translation de l'écran 36 suivant la direction X correspondant à la direction de déplacement des deux chariots 64 alignés des ensembles 60 et 60', la translation de l'écran 36 suivant la direction Y correspondant à la direction de déplacement du chariot du troisième ensemble 60", et une rotation de l'écran 36 autour d'un axe perpendiculaire au plan horizontal de débattement du support. Les mouvements autorisés par ces trois degrés de liberté permettent d'obtenir toutes les positions possibles de l'écran 36 par rapport à l'élément 6 définies par les débattements des chariots. Réciproquement, il n'existe qu'une seule combinaison de positions possible pour les chariots 64 qui permette d'obtenir la position recherchée pour l'écran 36 par rapport à l'élément 6 à imprimer.
- Cette combinaison de positions est déterminée par le calculateur 58, à l'aide d'équations mathématiques enregistrées dans sa mémoire, à partir des informations fournies par la caméra 56.
- Afin d'ajuster la position de l'écran 36, le calculateur 58 commande le déplacement en rotation des manivelles 72, par l'intermédiaire des moteurs 68.
- Dans le cas de l'ensemble 60, le déplacement en rotation de la manivelle 72 provoque une translation du chariot 64 correspondant suivant la direction X par rapport aux glissières 62, et provoque également un déplacement de la patte 42 suivant l'axe Y. Simultanément, le déplacement de la manivelle 72 de l'ensemble 60' provoque le déplacement du chariot 64 correspondant dans la direction X et le déplacement de la patte 42' correspondante suivant la direction Y. Le déplacement de la manivelle 72 du troisième ensemble 60" provoque le déplacement du chariot 74 correspondant dans la direction Y et le déplacement de la patte correspondante 42" suivant la direction X.
- Ces trois déplacements coordonnés sont calculés par le calculateur 58 de façon à guider le support 34 le long d'une trajectoire réalisable qui amène ce support dans la position recherchée.
- Une fois l'écran de sérigraphie en place, le calculateur 58 active les vérins permettant de descendre l'écran au plus près de l'élément 6 à imprimer, et provoque le déplacement des racles.
- Les
figures 6 à 8 représentent une variante de réalisation des moyens de déplacement du support 34. - Comme on le voit sur la
figure 6 , dans ce mode de réalisation, les glissières 62, 62' et 62" sont rigidement fixées sur une face supérieure du support 34, sur les pattes 42, 42', 42". Ces glissières guident les chariots 64 selon les mêmes directions X et Y que dans le premier mode de réalisation. - Les moteurs 68 sont disposés au-dessus du support 34, et sont rigidement fixés à une structure fixe par rapport au bâti 24, cette structure n'étant pas représentée pour plus de clarté.
- Les moyens motorisés de déplacement du chariot 64 de l'ensemble 60 sont représentés plus en détail sur les
figures 7 et 8 . Ils comprennent un chariot intermédiaire 80 disposé au-dessus du chariot 64, une vis sans fin 82 disposée dans le prolongement de l'arbre moteur 70, un accouplement 84 solidarisant en rotation la vis sans fin 82 et l'arbre 70, un palier 86 de guidage en rotation de la vis 82, et un écrou 88 rigidement fixé au chariot intermédiaire 80. La vis sans fin 82 est engagée dans l'orifice fileté de l'écrou 88. Les moyens motorisés 60 comprennent encore des glissières intermédiaires 90 de guidage du chariot intermédiaire 80. Ces glissières intermédiaires 90 et le palier 86 sont rigidement fixés sur la structure de support des moteurs 68. - Dans le cas des ensembles de couplage 60 et 60', les glissières 90 guident les chariots intermédiaires 80 suivant la direction Y. L'arbre moteur 70 et la vis sans fin 82 s'étendent également suivant la direction Y.
- Dans le cas de l'ensemble de couplage 60", les glissières intermédiaires 90 guident le chariot intermédiaire 80 suivant la direction X. L'arbre de sortie 70 et la vis sans fin 82 s'étendent donc suivant cette même direction X.
- Dans ce second mode de réalisation, le calculateur 58 commande l'entraînement en rotation des vis sans fin 82, par l'intermédiaire des moteurs 68, les chariots intermédiaires 80 étant ainsi entraînés en translation.
- Enfin, le chariot 64 est articulé au chariot intermédiaire 80 autour d'un axe 92 s'étendant perpendiculairement aux deux chariots. Cet axe 92 est rigidement fixé au centre du chariot 80 et est lié par une liaison rotule au centre du chariot 64.
- La machine d'impression décrite ci-dessus présente de multiples avantages.
- Les moyens de déplacement du support d'écran 34 par rapport au bâti dans son plan de débattement sont mécaniquement particulièrement simples. Le support est déplacé par trois ensembles de couplage comportant des chariots motorisés et des moyens de liaison glissières entre les chariots et le support. Ces trois ensembles sont pilotés par un calculateur de façon coordonnée, ce qui permet d'ajuster librement la position et l'orientation de l'écran de sérigraphie par rapport à l'élément à imprimer, de manière rapide et précise.
- Les moyens de déplacement du support présentent un encombrement particulièrement faible. Les moteurs de déplacement des chariots sont de petite taille, et les moyens d'entraînement du support (glissières, chariot, moyens d'entraînement du chariot par le moteur) sont compacts, tant dans le premier mode de réalisation que dans le second.
- De ce fait, la visibilité des opérations d'impression en cours par les opérateurs est accrue, de même que l'accessibilité de l'écran de sérigraphie. Les opérateurs peuvent donc surveiller plus facilement le déroulement des opérations, et peuvent intervenir de façon plus commode et plus rapide quand cela est nécessaire.
- Enfin, il est possible de mettre en oeuvre des actionneurs rapides et précis (moteur 68), de telle sorte que la cadence de production de la machine d'impression est élevée.
- La machine décrite ci-dessus peut présenter de multiples variantes.
- Les trois glissières et les chariots correspondants peuvent être disposés dans un même plan. Les glissières peuvent également être disposées dans des plans parallèles au plan de débattement, mais différents les uns des autres.
- La disposition des ensembles de couplage à la périphérie du support est choisie de façon à faciliter le guidage du support par déplacement coordonné des chariots. Il est avantageux dans cette perspective de disposer un des trois ensembles le long de chaque branche du support. Les chariots s'inscrivent ainsi dans un cercle dont le centre G est situé dans l'espace central du support, ce qui rend le guidage du support plus facile et plus précis. Il est à noter que les mouvements des chariots sont de faibles ampleurs au regard de la taille du support, de telle sorte que le centre G du cercle reste à chaque instant dans l'espace central.
- Comme décrit ci-dessus, deux des trois chariots peuvent être guidés par les glissières suivant des directions alignées, le troisième chariot étant guidé suivant une direction perpendiculaire à la précédente. Cette disposition est particulièrement avantageuse, car les équations mathématiques permettant au calculateur de déterminer la position recherchée pour l'écran et la trajectoire pour chaque chariot permettant de parvenir à cette position sont particulièrement simples. Toutefois, il est possible de disposer les glissières de façon à guider les trois chariots selon trois directions différentes les unes des autres. L'inclinaison entre ces différentes directions peut être quelconque. Il convient en revanche d'éviter que les trois directions de guidage soient parallèles entre elles, le guidage du support étant alors impossible. Deux des trois directions au moins doivent se couper. Il convient également d'éviter de placer les trois ensembles de couplage sur une même ligne, car il serait alors impossible de guider le support.
- Les moyens motorisés de déplacement des chariots peuvent comprendre d'autres types de moyens d'entraînement du chariot par le moteur que ceux décrits ci-dessus. Ces moyens d'entraînement peuvent être du type à pignon et crémaillère, ou encore à levier pivotant. Il est à noter que les trois ensembles de couplage peuvent comprendre des moyens d'entraînement différents, l'un des ensembles de couplage comprenant par exemple des moyens d'entraînement du chariot par manivelle, et les deux autres par vis sans fin.
Claims (11)
- Machine (2) d'impression par sérigraphie comprenant :- un bâti (24) ;- au moins un poste d'impression (22) comprenant un support (34) apte un recevoir un écran de sérigraphie (36) sur lequel est déposé un motif à imprimer ;- des moyens de déplacement du support (34) par rapport au bâti (24) dans un plan de débattement,les moyens de déplacement du support (34) comprenant :- trois ensembles de couplage (60, 60', 60") pourvus chacun d'un organe (64) mobile par rapport au bâti (24), de moyens de liaison glissière (62, 62', 62") de l'organe mobile (64) suivant une direction fixe et parallèle au plan de débattement, et de moyens (66) motorisés de déplacement de l'organe mobile (64) par rapport au bâti (24), deux au moins des trois directions fixes se croisant, et- des moyens de pilotage (58) des moyens (66) de déplacement motorisés des trois ensembles (60, 60', 60") indépendamment les uns des autres,caractérisée en ce que l'organe mobile (64) de chaque ensemble de couplage (60, 60', 60") est lié au support (34) par les moyens de liaison glissière (62, 62', 62") suivant une direction fixe par rapport au support (34).
- Machine selon la revendication 1, caractérisée en ce que deux des trois directions fixes sont parallèles entre elles, la troisième direction fixe étant perpendiculaire aux deux autres directions fixes.
- Machine selon la revendication 1 ou 2, caractérisée en ce que deux des trois directions fixes sont alignées.
- Machine selon l'une quelconque des revendications précédentes, caractérisé en ce que les moyens (66) de déplacement motorisés des trois ensembles (60, 60', 60") comprennent chacun un organe moteur (68) et un actionneur (72 ; 80) susceptible d'être entraîné par l'organe moteur (68) en déplacement par rapport au bâti (24) parallèlement au plan de débattement, l'actionneur (72 ; 80) étant lié par une articulation à l'organe mobile (64).
- Machine selon la revendication 4, caractérisée en ce que l'actionneur (72) est susceptible d'être entraîné en rotation par rapport au bâti (24) par l'organe moteur (68).
- Machine selon la revendication 5, caractérisée en ce que l'actionneur (72) est une manivelle comprenant une tige excentrique (74) liée à l'organe mobile (64).
- Machine selon la revendication 4, caractérisée en ce que l'actionneur (80) est susceptible d'être entraîné en translation par rapport au bâti (24) par l'organe moteur (68).
- Machine selon la revendication 7, caractérisée en ce que l'actionneur (80) est guidé par des glissières (90) en translation par rapport au bâti (24) suivant une direction sensiblement perpendiculaire à la direction fixe des moyens de liaison glissière (62, 62', 62") du même ensemble (60, 60', 60").
- Machine selon l'une quelconque des revendications 1 à 8, caractérisée en ce que les trois ensembles de couplage (60, 60', 60") sont répartis à la périphérie du support (34).
- Machine selon la revendication 9, caractérisée en ce que, considérés suivant une direction perpendiculaire au plan de débattement, les organes mobiles (34) des ensembles (60, 60', 60") s'inscrivent à chaque instant dans un cercle (C) présentant un centre (G) situé dans une partie centrale (40) du support (34).
- Machine selon la revendication 10, caractérisée en ce que le support (34) est un cadre délimitant un espace central (40) dans lequel est fixé l'écran de sérigraphie (36), le centre (G) du cercle (C), considéré suivant une direction perpendiculaire au plan de débattement, étant situé dans l'espace central (40).
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL07290393T PL1844931T3 (pl) | 2006-04-12 | 2007-04-02 | Maszyna drukarska do sitodruku |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0603235A FR2899840B1 (fr) | 2006-04-12 | 2006-04-12 | Machine d'impression par serigraphie |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1844931A1 EP1844931A1 (fr) | 2007-10-17 |
| EP1844931B1 true EP1844931B1 (fr) | 2008-10-29 |
Family
ID=37311364
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07290393A Not-in-force EP1844931B1 (fr) | 2006-04-12 | 2007-04-02 | Machine d'impression par sérigraphie |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7631597B2 (fr) |
| EP (1) | EP1844931B1 (fr) |
| DE (1) | DE602007000209D1 (fr) |
| ES (1) | ES2316140T3 (fr) |
| FR (1) | FR2899840B1 (fr) |
| PL (1) | PL1844931T3 (fr) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2932717B1 (fr) | 2008-06-24 | 2011-03-25 | Dubuit Mach | Machine a imprimer. |
| FR2936975B1 (fr) * | 2008-10-13 | 2011-06-03 | Dubuit Mach | Machine d'impression par serigraphie et procede d'impression associe |
| US20100125357A1 (en) * | 2008-11-19 | 2010-05-20 | Illinois Tool Works Inc. | Vertically separated pass through conveyor system and method in surface mount technology process equipment |
| IT1392992B1 (it) * | 2009-02-23 | 2012-04-02 | Applied Materials Inc | Procedimento e apparecchiatura per la stampa serigrafica di uno schema a strato multiplo |
| IT1392991B1 (it) * | 2009-02-23 | 2012-04-02 | Applied Materials Inc | Procedimento di stampa serigrafica autoregolantesi |
| IT1398433B1 (it) * | 2009-09-03 | 2013-02-22 | Applied Materials Inc | Apparato e procedimento per la lavorazione di un substrato |
| CN101791898B (zh) * | 2010-03-05 | 2012-06-27 | 中国电子科技集团公司第四十五研究所 | 太阳能电池片印刷网框对位调整装置 |
| DE102011005158A1 (de) * | 2011-03-04 | 2012-09-06 | JRT Photovoltaics GmbH & Co. KG | Siebdruckstation für flächige Substrate, insbesondere für Solarzellen |
| JP5189194B2 (ja) * | 2011-09-05 | 2013-04-24 | ミカドテクノス株式会社 | 真空加熱接合装置及び真空加熱接合方法 |
| CN102431281B (zh) * | 2011-09-23 | 2014-01-15 | 湖南红太阳光电科技有限公司 | 一种丝网印刷机定位夹持机构 |
| CN107534065A (zh) * | 2015-05-08 | 2018-01-02 | 应用材料意大利有限公司 | 针对太阳能电池产品在基板上作丝网印刷的方法、针对太阳能电池产品在基板上作丝网印刷所用的丝网及针对太阳能电池产品在基板上作丝网印刷的设备 |
| DE102017201715B4 (de) * | 2017-02-02 | 2022-08-18 | Ekra Automatisierungssysteme Gmbh | Druckvorrichtung |
| DE102018207336B4 (de) * | 2018-05-09 | 2021-06-24 | Asys Automatisierungssysteme Gmbh | Bearbeitungsvorrichtung zum Bearbeiten von Substraten |
| CN112264246B (zh) * | 2020-09-04 | 2022-01-18 | 航天科工空间工程发展有限公司 | 一种涂覆装置及涂覆方法 |
| CN113211939A (zh) * | 2021-04-15 | 2021-08-06 | 南通东川数码科技有限公司 | 一种全自动印花设备 |
| WO2024188677A1 (fr) * | 2023-03-11 | 2024-09-19 | Exentis Knowledge Gmbh | Porte-pièce et appareil permettant de produire des pièces sérigraphiées tridimensionnelles |
| WO2024188676A1 (fr) * | 2023-03-11 | 2024-09-19 | Exentis Knowledge Gmbh | Appareil de fabrication de pièces sérigraphiées tridimensionnelles et procédé associé |
| EP4431302A1 (fr) * | 2023-03-11 | 2024-09-18 | Exentis Knowledge GmbH | Dispositif de fabrication de pièces sérigraphiées tridimensionnelles, et procédé associé |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2519841B2 (ja) * | 1991-03-05 | 1996-07-31 | 東伸工業株式会社 | 自動スクリ―ン捺染機におけるスクリ―ンの型合せ調節装置 |
| JP2614946B2 (ja) * | 1991-05-27 | 1997-05-28 | 日立テクノエンジニアリング株式会社 | スクリーン印刷機 |
| JPH0596700A (ja) * | 1991-10-04 | 1993-04-20 | Murata Mfg Co Ltd | スクリーン印刷の位置合わせ方法 |
| US5619919A (en) * | 1995-02-13 | 1997-04-15 | Autoroll Machine Corporation | Silk-screen print head for the printing of halftones on the surface of a substrate |
| JP3492491B2 (ja) * | 1997-05-12 | 2004-02-03 | Tdk株式会社 | スクリーン印刷マスク補正方法及び装置 |
| WO1999019145A1 (fr) * | 1997-10-13 | 1999-04-22 | Autotec Ag | Prereglage d'ecrans de serigraphie |
| US5901646A (en) * | 1997-10-21 | 1999-05-11 | Preco Industries, Inc. | Screen printing machine having three axes screen registration with shiftable support vacuum table for web |
| JP3504623B2 (ja) * | 2001-03-12 | 2004-03-08 | マイクロ・テック株式会社 | スクリーン印刷装置及びスクリーン製版セット方法 |
-
2006
- 2006-04-12 FR FR0603235A patent/FR2899840B1/fr not_active Expired - Fee Related
-
2007
- 2007-04-02 EP EP07290393A patent/EP1844931B1/fr not_active Not-in-force
- 2007-04-02 DE DE602007000209T patent/DE602007000209D1/de active Active
- 2007-04-02 ES ES07290393T patent/ES2316140T3/es active Active
- 2007-04-02 PL PL07290393T patent/PL1844931T3/pl unknown
- 2007-04-10 US US11/783,480 patent/US7631597B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| FR2899840A1 (fr) | 2007-10-19 |
| ES2316140T3 (es) | 2009-04-01 |
| EP1844931A1 (fr) | 2007-10-17 |
| FR2899840B1 (fr) | 2008-07-04 |
| PL1844931T3 (pl) | 2009-04-30 |
| US7631597B2 (en) | 2009-12-15 |
| DE602007000209D1 (de) | 2008-12-11 |
| US20070240588A1 (en) | 2007-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1844931B1 (fr) | Machine d'impression par sérigraphie | |
| FR2535639A1 (fr) | ||
| EP0329237B1 (fr) | Machine de sérigraphie | |
| FR2585276A2 (fr) | Machine executant diverses operations d'usinage telles que tournage, fraisage, alesage | |
| FR2936975A1 (fr) | Machine d'impression par serigraphie et procede d'impression associe | |
| FR2584640A1 (fr) | Appareil d'echange de palettes pour machine d'usinage | |
| EP0611240B1 (fr) | Machine à imprimer comportant au moins un cylindre à double déplacement | |
| FR2593728A1 (fr) | Poinconneuse a entrainement equilibre | |
| EP0233799B1 (fr) | Dispositif de mise à poste d'une pièce circulaire | |
| FR2601619A1 (fr) | Dispositif de changement rapide de tetes d'extrusion de revetements de cables. | |
| FR2494617A1 (fr) | Robot universel | |
| EP1820647B1 (fr) | Machine et procédé de marquage de pièces de forme | |
| FR2856337A1 (fr) | Machine d'impression d'objets | |
| CA2088691A1 (fr) | Dispositif de positionnement a l'arret pour chariot de manutention | |
| BE1000097A6 (fr) | Appareil pour aligner des feuilles de verre dans une ligne de production, notamment de pare-brise. | |
| FR2746681A1 (fr) | Procede et appareil d'alimentation en pieces longues | |
| EP0738675A2 (fr) | Magasin à chariots mobiles portant des châssis inclinés | |
| BE902440A (fr) | Appareil et procede pour espacer et orienter des morceaux de pate pour croissants. | |
| EP0564372B1 (fr) | Appareil d'impression offset | |
| EP0052029B1 (fr) | Dispositif modulaire de contrôle dimensionnel automatique de pièces de révolution | |
| BE1003872A5 (fr) | Systeme de support sur voie. | |
| FR2476059A1 (fr) | Machine et procede pour conformer le bord d'une plaque de verre | |
| EP0252802A1 (fr) | Machine à bois notamment pour la réalisation de cadres ou châssis de fenêtre | |
| FR2594735A1 (fr) | Appareil de transfert de pieces pour machines-outils | |
| EP0086702A1 (fr) | Machine à déposer un cordon de matière plastique ou analogue sur une surface sensiblement plane |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| 17P | Request for examination filed |
Effective date: 20071112 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| AKX | Designation fees paid |
Designated state(s): DE ES GB IT PL |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE ES GB IT PL |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REF | Corresponds to: |
Ref document number: 602007000209 Country of ref document: DE Date of ref document: 20081211 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2316140 Country of ref document: ES Kind code of ref document: T3 |
|
| REG | Reference to a national code |
Ref country code: PL Ref legal event code: T3 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20090730 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100402 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20150331 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20160504 Year of fee payment: 10 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160402 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20180703 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170403 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20180514 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20180424 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20180518 Year of fee payment: 12 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602007000209 Country of ref document: DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20190402 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191101 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190402 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190402 |