EP1754891A2 - Motordosierpumpe - Google Patents
Motordosierpumpe Download PDFInfo
- Publication number
- EP1754891A2 EP1754891A2 EP06119205A EP06119205A EP1754891A2 EP 1754891 A2 EP1754891 A2 EP 1754891A2 EP 06119205 A EP06119205 A EP 06119205A EP 06119205 A EP06119205 A EP 06119205A EP 1754891 A2 EP1754891 A2 EP 1754891A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- stroke
- pump according
- position sensor
- dosing pump
- metering
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000006073 displacement reaction Methods 0.000 claims abstract description 78
- 230000033001 locomotion Effects 0.000 claims description 76
- 239000012528 membrane Substances 0.000 claims description 63
- 230000005540 biological transmission Effects 0.000 claims description 17
- 238000012937 correction Methods 0.000 claims description 17
- 230000006870 function Effects 0.000 claims description 17
- 230000002829 reductive effect Effects 0.000 claims description 15
- 230000003287 optical effect Effects 0.000 claims description 14
- 238000000418 atomic force spectrum Methods 0.000 claims description 9
- 238000011156 evaluation Methods 0.000 claims description 9
- 230000035945 sensitivity Effects 0.000 claims description 8
- 238000001514 detection method Methods 0.000 claims description 7
- 238000012545 processing Methods 0.000 claims description 7
- 230000033228 biological regulation Effects 0.000 claims description 6
- 230000007704 transition Effects 0.000 claims description 6
- 230000001133 acceleration Effects 0.000 claims description 5
- 230000005489 elastic deformation Effects 0.000 claims description 5
- 230000015572 biosynthetic process Effects 0.000 claims description 3
- 238000007639 printing Methods 0.000 claims description 3
- 210000004379 membrane Anatomy 0.000 description 51
- 238000000034 method Methods 0.000 description 36
- 238000005259 measurement Methods 0.000 description 15
- 230000008569 process Effects 0.000 description 13
- 238000012544 monitoring process Methods 0.000 description 11
- 238000013461 design Methods 0.000 description 10
- 238000004519 manufacturing process Methods 0.000 description 10
- 238000004364 calculation method Methods 0.000 description 7
- 230000001419 dependent effect Effects 0.000 description 7
- 238000003384 imaging method Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 6
- 230000000694 effects Effects 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 230000006835 compression Effects 0.000 description 5
- 238000007906 compression Methods 0.000 description 5
- 230000009467 reduction Effects 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 238000012935 Averaging Methods 0.000 description 3
- 238000011109 contamination Methods 0.000 description 3
- 238000009795 derivation Methods 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 230000036039 immunity Effects 0.000 description 3
- IIZPXYDJLKNOIY-JXPKJXOSSA-N 1-palmitoyl-2-arachidonoyl-sn-glycero-3-phosphocholine Chemical compound CCCCCCCCCCCCCCCC(=O)OC[C@H](COP([O-])(=O)OCC[N+](C)(C)C)OC(=O)CCC\C=C/C\C=C/C\C=C/C\C=C/CCCCC IIZPXYDJLKNOIY-JXPKJXOSSA-N 0.000 description 2
- 239000005708 Sodium hypochlorite Substances 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 230000032683 aging Effects 0.000 description 2
- 230000004888 barrier function Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 125000000524 functional group Chemical group 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000016507 interphase Effects 0.000 description 2
- 229940067606 lecithin Drugs 0.000 description 2
- 235000010445 lecithin Nutrition 0.000 description 2
- 239000000787 lecithin Substances 0.000 description 2
- 238000010943 off-gassing Methods 0.000 description 2
- 210000000056 organ Anatomy 0.000 description 2
- SUKJFIGYRHOWBL-UHFFFAOYSA-N sodium hypochlorite Chemical compound [Na+].Cl[O-] SUKJFIGYRHOWBL-UHFFFAOYSA-N 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 240000003517 Elaeocarpus dentatus Species 0.000 description 1
- 241001295925 Gegenes Species 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000003139 buffering effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 238000010292 electrical insulation Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000008520 organization Effects 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 230000000306 recurrent effect Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000001718 repressive effect Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000010454 slate Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
- 230000003797 telogen phase Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000010998 test method Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B13/00—Pumps specially modified to deliver fixed or variable measured quantities
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
- F04B49/065—Control using electricity and making use of computers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2201/00—Pump parameters
- F04B2201/02—Piston parameters
- F04B2201/0201—Position of the piston
Definitions
- the invention relates to a motor metering pump according to the preamble of claim 1.
- Such motor metering pumps are well known and are adapted by additional equipment to the respective requirements. They work according to the volumetric principle, in which the metering process consists of transporting a sealed chamber volume through a displacement element. The dosing volume per stroke corresponds to the volume difference during the movement of the displacement element.
- the generally continuous rotational movement of a drive motor is converted by a gear unit into an oscillating linear movement of the displacement element.
- the speed and torque of the engine is reduced in a gearbox and adapted to the speed and the power requirement of the displacement element.
- the output shaft of the transmission drives a device for converting the rotational movement into a lateral displacement, i. at right angles to the axis of rotation, at, e.g. a spring / cam or an eccentric drive.
- the lateral deflection movement actuates a push rod, which is guided axially displaceably in the direction of the deflection movement in bearings.
- the return spring is compressed in the pressure stroke and is dimensioned in its dimensioning to the power requirement during the intake process.
- the force is coupled from the push rod to a membrane as a displacement element either by a rigid connection or by a hydraulic DC link. Since the hydraulic fluid, usually oil, is not compressible, a hydraulic coupling acts like a rigid connection.
- pump constructions are also known which operate with two or more dosing heads operated on a common drive. On the one hand can be arranged as an embodiment on both sides of an eccentric two opposing push rods in a common longitudinal axis, which are operated in opposite directions and each drive a dosing with its own displacement member.
- All moving parts are stored in a simple case in a common pump housing by ball or plain bearings, in other embodiments, individual functional groups in other housing or mounting parts, which are also partly filled with oil, combined into functional groups and assembled as modules.
- An example of this would be a mounted outside the pump housing unit of the engine and reduction gearbox with mounting flange and already stocked output shaft.
- the drive motor for a continuous metering is switched on continuously or for carrying out individual metering strokes for a certain time.
- Other designs control the drive motor via a frequency converter according to a predetermined time profile, whereby the engine speed and thus the metering performance better reproducible and independent of electrical parameters such. the frequency or the current level of mains voltage.
- the engine speed is dictated by the electrical frequency of the motor drive and, together with the gear ratio and the transmission characteristic which is sinusoidal in an eccentric gear, determines the duration of each stroke.
- the duration per stroke results from the effective engine speed in the load condition and the gear reduction.
- on / off operation in which individual strokes or Hubwee are processed, between which the engine is defined, for example, in Ansaugotyak stopped, start-up and braking times are added and extend the time per stroke accordingly.
- the stroke frequency is in continuous operation by the duration per stroke or in on / off operation given by the repetition frequency of the engine starts, which of course can not be done more often than it dictates the time required to execute a stroke.
- the stroke length can be adjusted by limiting the lateral deflection. This can be done by adjusting an eccentricity, e.g. by using so-called wobble cylinders, which work on the basis of two mutually rotatable slate planes.
- an adjustable stop is common, which can be used in non-positively guided deflection systems. This stop in the form of a mechanically adjustable spindle limited with appropriate adjustment the backward movement of the push rod when sucking on an adjustable position before reaching the rear dead center of the deflection device. By the stop the starting point of the lifting movement is specified; the end position results from a fully executed deflection movement.
- One possible embodiment is to screw a Hubverstellbolzen accessible from the device operating side knob and scale in a thread of the pump housing, which represents the stop for the push rod during suction.
- the stroke adjustment is e.g. realized by a sliding sleeve whose position is adjustable by an accessible from the device operating side knob with scale, which is screwed into a thread of the pump housing.
- the sleeve covers a bypass bore in the push rod which releases a shunt of the oil circuit after traversing a certain path and thus releases the power coupling from the push rod to the diaphragm.
- the sequence of movement of the displacement member results from the interaction of the gear and other mechanical components.
- the drive operates against the force acting on the push rod by the displacer and the (occasionally present) return spring.
- the push rod is also retracted by the drive when positively guided deflection system, in one-sided operation, the return spring pushes back the push rod and brings the force for the suction of the metering medium.
- the movement of the push rod follows the characteristic of the deflection device; in the case of an eccentric, this is, for example, a sinusoidal profile, which lies at full stroke length between the two dead centers of the eccentric stroke.
- eccentricity movement continues to be purely sinusoidal with reduced amplitude, in rigidly coupled variable butt systems and by-pass hydraulic systems, the original motion and amplitude of the deflector remains intact, but is no longer completed; Rather, the push rod movement is cut off depending on the set stroke length and coupling system in the beginning or in the end (phase control).
- the forward movement for the execution of the pressure stroke takes place depending on the control of the engine in a time range well below one second (eg in the range 200ms), the suction stroke also takes place after a predetermined by the deflection device course within a similar time as the pressure stroke. This results in both Hubphasen relatively high instantaneous speeds of the metering medium; in an eccentric drive, the maximum is approximately halfway along the movement.
- these eccentric can be arranged out of phase on the shaft to the respective peak power requirement of the individual dosing heads in time to a full rotation of the eccentric shaft to distribute and so optimally exploit the available engine power.
- diaphragm metering pumps have a partially flexible membrane as the displacement element. This is not rigid, but deforms elastically in the Walk range by a certain amount when the pressure of the metering medium acts on them. The amount of this deformation, which is built up in a first, unused for the dosage portion of the lifting movement, is lost to the effectively executed lifting movement and causes the Dosiermenge decreases with increasing working pressure. This falling characteristic is much more pronounced in normal applications than the required dosing accuracy would permit. Motor metering pumps therefore usually can not be operated in a general setting over a wide range of working pressure with the desired accuracy; rather, the occurring error is detected by a calibration measurement and included in the further calculations. However, this calibration measurement must be carried out under actual working conditions in the specific application and is, especially in connection with aggressive chemicals, a work step which entails considerable expense.
- the object of the present invention is in particular to eliminate the known disadvantages with respect to the hydraulic properties of the dosing process and thereby to achieve a variable, wider range of application of the motor metering pumps, without negatively affecting their production costs. Furthermore, the movement process of the push rod and the associated Displacement organ so the target information to be adjusted so that both the dosing itself is adjustable, as well as by manufacturing technology or adverse properties of components (eg the elastic membrane, if any) resulting errors by the electronic control can be considered and repaired. These measures are intended to ensure the exact metering of a given volume of a metering medium in a metering process by avoiding or detecting faulty operating conditions, and that manufacturing and / or inaccuracies occurring in use can be compensated for by the electronics used.
- the solution of the problem is that with the push rod, a reference element is connected, the position of which is scanned by a position sensor, wherein the position sensor outputs an actual signal (x l ), which to the position of the reference element and thus of the displacement member in a fixed relationship stands and with the help of which knowledge about the movement sequence of the displacement element is obtained, so that the electronic control of the metering pump can react to operating states of the dosing circuit and the pump.
- the controller examines the sequence of motions on characteristic features in each case on the basis of the basic conditions and responds by influencing the motor control in such a way that the dosage follows the specification as well as possible and which is otherwise e.g. be eliminated by the properties of the membrane resulting inaccuracies.
- the position sensor operates according to a non-contact principle, a wear-free operation of the sensor is ensured, which is advantageous and ultimately necessary in view of the high number of strokes during the life of a metering pump.
- the reference element influences the beam path of a light source and if the position sensor cooperating with it, which is fixedly arranged in the pump housing or on another stationary part, works according to a photosensitive receiver principle, wear-free operation is ensured on the one hand, as is the case in view of the high number of strokes during The life of a metering pump is essential, and the moving parts are scanned without contact.
- One Another advantage of this arrangement is that such a design of a position sensor is in principle insensitive to stray magnetic fields.
- the reference element is a shadow body or a shadowing contour and the position sensor interacting with it, which is fixedly arranged in the pump housing or at another stationary part, consists of a series of photosensitive charge-coupled receiver cells (so-called CCD cells) such an optical-based arrangement has important properties that the position sensor must meet.
- CCD cells photosensitive charge-coupled receiver cells
- the position sensor continues to be arranged on its own sensor carrier, which is fixedly connected to the pump housing or other stationary part, such an arrangement can be pre-assembled and tested as a unit, thus facilitating the assembly.
- the sensor carrier is designed as part of non-conductive plastic, this additionally simplifies the electrical insulation of the sensor components against metallic parts of the housing or of the transmission.
- the light source, the shadow body or the shadowing contour and the receiver represent a light barrier-like arrangement and the measured values are fed continuously or intermittently to the electronic controller, such an arrangement provides the electronic data to the electronic controller with a speed that is appropriate to the requirements.
- the optical receiver of the position sensor consists of a number of linearly arranged receivers (pixels), preferably 128 pixels, such an arrangement can easily determine the position by counting the shadow boundary between illuminated and unlit cells and already achieves a resolution with this simple method the distance of the cells of the receiver module used.
- the light source is a light-emitting diode (LED), which is arranged opposite the optical receiver of the position sensor, that its light beam on the direct path to the receiver is not hindered by the push rod, this has the advantage that the inexpensive LED has an approximately punctiform spot which is indispensable for a high optical resolution, and practically has an almost infinite lifetime.
- the arrangement opposite the position sensor past the push rod results in a large distance between light source and receiver, which makes the projection angle of the relevant light beam relatively independent of the mounting position of the elements.
- the output value of the position sensor is formed by interpolation of the brightness values of a plurality of pixels lying in the shadow transition region, a finer resolution is achieved for the output signal of the position sensor than predetermined by the mechanical grid of the cells of the CCD receiver.
- the sensitivity of the position sensor to assembly deviations and mechanical displacements during operation, e.g. due to heating or bearing wear is reduced if zero position errors of the position sensor are eliminated by means of a reference memory or scaling error of the position sensor by approaching one or more reference positions.
- Compensating for brightness variations between individual pixels of the optical receiver by incorporating a reference memory for the sensitivity of each pixel reduces the effects of contamination of the optical receiver.
- the otherwise additional necessary sensor for the mechanical position of the associated adjusting elements can be omitted.
- metering pumps of conventional design without position sensor sensors are often used to deliver a feedback pulse to monitor the dosing, for example when passing a reference mark per stroke to the electronic control, from which measured the Hubperiodendauer and a trouble-free flow of dosing can be derived.
- the described use of a position sensor has the advantage that the desired information is present at each time of the metering stroke, and not only when passing the reference mark, so that such additional sensors can be omitted without detriment.
- the drive motor operates on a slip-prone principle by e.g. an asynchronous motor is used, and determines the electronic control of the set by the control target speed of the drive motor and the known transmission characteristics a Sollhubfrequenz or Sollhubperiode for the displacement member and detects them additionally by evaluating the position sensor signal, the actual stroke frequency or the actual stroke period of the displacement element in which it calculates the slip of the drive motor by comparing the actual stroke frequency with the Sollhubfrequenz or the actual stroke period with the Sollhubperiode the displacement member and its target speed changed so that the displacement member ultimately moves with the desired stroke frequency, this improves the accuracy of the dosage Eliminate the error in the stroke frequency that would be caused by the slip of the drive motor.
- sensors are often used which are used to monitor the metering movement, e.g. when passing a reference mark per stroke deliver a feedback pulse to the electronic control, from which also the Hubperiodendauer can be measured and corrected; Such additional sensors may be omitted when using a position sensor.
- the drive motor operates according to a slip-prone principle, for example by using an asynchronous motor, and determines the electronic control of the predetermined by the control target speed of the drive motor and the known transmission characteristics Sollhubfrequenz or Sollhubperiode for the displacement member and additionally detects by evaluating the position sensor signal the actual stroke frequency or the actual stroke period of the displacement member, wherein it calculates the slip of the drive motor by comparing the actual stroke frequency with the Sollhubfrequenz or the actual stroke period with the Sollhubperiode the displacement member and further determines the electronic control of the thus determined slip of the drive motor and the known transmission characteristic acting on the displacer force and thus makes a conclusion on the working pressure of the metering before, can practice with this information Monitoring and compensation functions are implemented, which improve the reliability and accuracy of the dosage.
- the electronic control recognizes an operation outside the specified pressure range from the determined working pressure of the metering medium and adjusts the metering when a maximum permissible pressure specified by the specification of the metering pump or by a user input is exceeded or if a predetermined minimum pressure is undershot, erroneous results occur
- Operating conditions such as overpressure situations or pressure loss detected by a defective piping and it can safety measures such as Adjusting the dosage be taken, which improves the reliability of the dosage.
- the otherwise necessary additional resources such as e.g. Overpressure limiters can be saved as long as the dosing pump is the only pressure-increasing unit in the process.
- the ability to control the working pressure to values within the specified pressure range of the metering pump extends the possibilities of pressure monitoring to situations in which the monitoring system of conventional metering pumps, which responds only when the metering pump is blocked, can not be used.
- the displacement member is a partially elastic membrane and determines the electronic control of the measured working pressure of the metering and the known dependence of the metering of the working pressure, which is caused by the elastic deformation of the membrane, an expected metering error, and it affects the speed of the drive motor and so that the stroke frequency so that this expected dosing error is counteracted, this improves the accuracy of the dosage.
- the signal read out from the position sensor (x I ) for the position of the push rod via a control loop within its control accuracy influences the speed of the drive motor and as a result, the linear movement of the push rod and thus of the displacement member so that they This set influencing the movement of the displacement member to achieve or improve advantageous hydraulic properties of the dosage, eg in the slow dosing and / or the dosing accuracy in Generalhub Schl be exploited.
- the metering pump has a control device in addition to the position sensor and influences this alternatively the position (referred to below as x I ), the speed (hereinafter referred to as v I ) or the acceleration of the displacer via a control device influenced by changing the speed of the drive motor, can suitably
- the advantages of the respectively more suitable control method are specifically used.
- Control of the speed allows a direct control of the actual flow rate of the dosing medium, which is required, for example, for the slower suction to avoid cavitation.
- regulation of the position makes it possible to control situations near standstill, in which the speed information which is formed by differentiating the path signal becomes very small and can no longer be usefully processed by the control device.
- the control of the position avoids this difficulty and is advantageous to apply for example in the electronic stroke length limitation or slow dosing.
- the regulation of the acceleration is advantageous for easy controllability of the control, since the acceleration of the moving masses for fast processes is a direct reflection of engine power.
- Has the metering pump in addition to the position sensor a control unit and converts them v I of the displacement body in the intake phase and / or in the pressure phase selectively reduced, so thus is pressure losses caused by flow resistance, or to counteract the occurrence of cavitation.
- pressure losses occur at bottlenecks, such as in the valves, when the flow velocity is too high.
- These pressure losses must be applied in the form of an additional force by the drive and can be kept low when using the control of v l of the displacer.
- flow noise is effectively reduced at reduced flow rate.
- the movement of the displacement member to the stroke length to be executed by the controller stops the drive motor after executing the desired stroke length, in the reversing switches over and then performs a suction stroke and then stops the engine or performs the subsequent pressure stroke, in principle, the associated mechanical adjustment can be omitted.
- the metering pump in addition to the position sensor has a control device and the control device distributes the forward movement of the displacement member during the printing phase by driving the drive motor to the predetermined by the repetition frequency of Dosierhübe time that the application of the dosing carried out as evenly as possible, up to very slowly running Dosierh GmbH of eg a few minutes, concentration fluctuations of the dosing medium can be largely avoided.
- the dosing accuracy is improved when the displacer is a partially elastic membrane and the electronic control recognizes the opening of the outlet valve from the instantaneous force flow across the membrane and uses this observation to measure the dead zone resulting from the elastic deformation of the membrane and the one actually carried out Stroke influenced by targeted termination of the stroke depending on the determined membrane deformation so that the dependence of the dosing amount is significantly reduced by the back pressure.
- This improvement is achieved by eliminating the error caused by the elastic deformation of the membrane under the effect of the working pressure, that the amount of this deformation does not contribute to the dosage. Due to the reduced dependency of the metered amount on the working pressure, recalibrations that would otherwise occur if there is a significant change in operating parameters, e.g. The working pressure required, omitted.
- the derivation of the membrane deformation from an observation of the force curve is particularly advantageous in evaluating the engine slip, because this represents a good reflection of the actual power requirement and thus requires no additional metrological effort.
- the metering accuracy is improved if the metering pump has a control device in addition to the position sensor, the displacement member is a partially elastic membrane and the actually executed stroke is influenced depending on the determined membrane deformation by the control device, the drive motor after executing the desired stroke length from the opening of the Stops discharge valve, switches to reversing mode and then performs a suction stroke and then stops the engine or performs the subsequent pressure stroke, such that the error contribution (related to the stroke or the metered volume) caused by the membrane deformation, which arises because the amount of this deformation does not contribute to the metering, is eliminated.
- the displacer is a partially elastic membrane and the metering pump has a control device in addition to the position sensor, and the actually executed stroke frequency is influenced as a function of the determined membrane deformation by the control device applying a correction value for the error contribution caused by the membrane deformation (related to the stroke or stroke)
- the measured volume is determined and the setpoint speed of the drive motor is changed by means of this correction value so that the error contribution caused by the membrane deformation is eliminated, the dependence of the dosing amount on the working pressure is reduced.
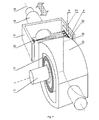
- Fig. 1 shows the structure of a motor metering pump (partially cut).
- the motor metering pump consists, as is generally known, essentially of three groups of components, namely the drive motor 2 with gear unit, the eccentric drive in the eccentric housing 1 and the electronics housing 28 with the electronic control contained therein and the electronic assemblies and components used therein.
- the electronics housing 28 has on the bottom of a bottom plate 4 with mounting holes, the eccentric housing 1, which is mounted on the electronics housing 28 and fixedly connected thereto, carries the drive motor 2 with gear unit, the e.g. connected via screws with the eccentric housing.
- the components of the eccentric drive are attached in an eccentric carrier 22, which ensures the positional alignment of the individual parts to one another and is fastened in the eccentric housing 1.
- a three-phase asynchronous motor 2 is flanged together with a reduction gear 11, which is designed as an angle gear, as a unit from the outside of the eccentric housing 1 and connected with screws.
- the output shaft of the geared motor forms a right angle to the shaft axis of the motor and either directly forms the drive shaft of the eccentric drive or, as in the described embodiment, is connected to the same axis via a clutch.
- the drive shaft of the eccentric drive, the eccentric shaft 17 is rotatably mounted in the eccentric carrier 22 and carries as an integral part with her an eccentric.
- the eccentric shaft penetrates with the eccentric a suitably cut push bar 20.
- the eccentric shaft 17 is rotated by the motor / gear unit via the shaft coupling with the motor 2 driven in rotation and further drives the push bar 20 on an inner surface of its section, namely the contact surface with the Outside surface of the eccentric on.
- the push bar 20 drives a fixedly connected to him, in the example injected, push rod 19 at.
- the unit of push bar 20 and push rod 19 is mounted longitudinally displaceable in two slide bushes.
- the axis of the eccentric shaft 17 and the longitudinal axis 18 of the push bar 20 and the push rod 19 are each in the horizontal plane and form a right angle to each other.
- One of the two sliding bushes 26 for the push rod 19 is seated in a bearing plate 24 which is attached to the eccentric carrier 22 on the printhead side;
- Achs convinced to the longitudinal axis 18 of the push rod 19 is a manually operated adjusting 7 for the adjustment of the Hubverstellbolzens 8 screwed into a thread of the Exzenterussis 22 that limits the axial movement of the push bar 20 during suction and thus the stroke of the metering pump.
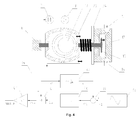
- the housing further contains in its lower part in a closed space, the electronics housing 28, the electronic control.
- the housing is splash-proof and protects the eccentric drive and the electronic control against moisture or corrosion, as dosing pumps are often used in conjunction with chemically aggressive media.
- the electronic control consists of a horizontal control electronics 34 with the power switching stages for the motor driver 29, which are designed as an integrated frequency converter, and arranged in a housing cover 5 electronics 6, which contains the necessary for the operation of the metering input and display elements.
- the controls are protected by a cover 9. Below the cover 9 connections are provided for the control lines 10 and for the power supply.
- a dosing head 12 On the side opposite the control lines 10 or the power supply connection, a dosing head 12 is arranged coaxially with the longitudinal axis 18 of the push rod, in which a dosing head 12 is provided as the displacement element. made of plastic membrane 13 works, which is firmly clamped at its periphery.
- the dosing head 12 also carries an inlet valve 14 and an outlet valve 15 in order to press the dosing medium sucked in via the inlet valve 14 between the diaphragm 13 and the dosing head 12 into the dosing line via the outlet valve 15.
- the motor metering pump operates on the volumetric principle, i. a predetermined volume should be sucked in each stroke on the one hand and on the other hand discharged via the exhaust valve 15.
- the diaphragm 13 is set in an oscillating motion by means of the eccentric drive which reciprocates the push rod 19 in the longitudinal axis.
- At the opposite end of the metering head 12 facing part of the push rod 19 is fixedly connected to the core 30 of the membrane 13 and puts them in an oscillating motion.
- a compression spring 23 for example, a coil spring is arranged, which engages the push bar 20 at any time form-fitting manner on the eccentric.
- the push bar is moved with the push rod towards the compression spring, at the same time the membrane 13 is pressed into the dosing chamber 16, with the result that an overpressure arises in the dosing space, the outlet valve 15, eg a spring-loaded ball valve, opens and the metering medium is forced into the metering line.
- the push bar 20 is moved by the compressed compression spring 23, which may be formed, for example, as a spiral spring following the eccentric movement in the opposite direction to Hubverstellbolzen 8, which
- the connecting rod 19 connected to the diaphragm 13 entrains the membrane in its movement, whereby a negative pressure is created in the dosing chamber 16, which opens the inlet valve 14, so that once again dosing medium can be sucked into the dosing chamber. Due to the alternating, oscillating movement of the diaphragm 13 by means of the eccentric drive, the delivery flow of the metering medium is formed in the metering line.
- the position of the unit consisting of push bar 20, push rod 19 and diaphragm 13 is scanned by the position sensor 36, the measurement signal is in a defined relationship to this position; this relationship may be considered as possible execution e.g. be strictly proportional.
- the measurement signal of the position sensor 36 always refers to the position of the part of the movable unit, where it acts. This point of attack is formed by the reference element, which in this context is to be understood in an abstract sense.
- it may be designed as a concrete component to be mounted in addition, but also only from a characteristic embodiment, e.g. an edge or surface on any of the components required anyway, e.g. on the push bar 20, exist.
- CCD charge coupled device
- a light source 33 e.g. a light emitting diode (LED)
- the sensor carrier 31 connected to the eccentric carrier and the components mounted thereon form a light barrier whose beam path is partially interrupted by the push bar.
- the reference element is formed by a shadow edge 35 of the push bar 20 in the region of the light barrier arrangement.
- the shadow edge 35 passes over the light-sensitive cells 32 in a contact-free manner.
- FIG. 5 which shows a plan view in the axial direction
- the light source 33 must be arranged so that the light beam on its Way to the photosensitive cells 32 is not covered by the push rod 19; ie, that the light source 33 and the line of the photosensitive CCD cells 32 are arranged above or below the push rod 19.
- FIG. 5 which shows a plan view in the axial direction
- light source 33 is illuminated by means of the shadow edge 35 cast a shadow on the photosensitive cells 32, dividing the cells in principle into light (h) and non-illuminated (d) cells. Since the series of light-sensitive cells arranged parallel to the longitudinal axis 18, for example 128 pixels covering a distance of approximately 8 mm, is only partially exposed or shaded in the border area, the transitional situation of the shadow profile SV is shown in FIG. The height of the rectangular areas shown in FIG. 8 represents the illuminance of the respective pixels. By means of a special method, which will be described later in detail and explained with reference to FIG. 10, this limit situation is used to determine the respective position of the shadow edge and thus to determine the position of the push rod or the membrane exactly.
- This measuring device consisting of thrust-arm-side shadow edge and sensor carrier side light-sensitive CCD cells with opposite light source, serves to measure the actual position or the speed of the oscillating push rod and to use this information for the realization of the described functions.
- the push rod which causes the diaphragm to oscillate, travels a distance each stroke equaling the mechanical stroke length.
- the longitudinal extent of the photosensitive CCD cells must be slightly larger. In principle, this also applies to any other conceivable position sensor used.
- the movable part of the drive whose movement is to be controlled, consists of the push bar 20 with the push rod 19, with the diaphragm 30 is firmly connected.
- the return spring 23 retrieves the push bar after a successful stroke and thus causes the suction.
- the outer ring of the membrane 13 is fixedly mounted in the dosing head 12, the metal membrane core 30 injected into the membrane moves the central surface of the membrane as a displacement element in the dosing head.
- the inlet valve 14 closes on the suction side, the outlet valve 15 on the pressure side of the dosing and offers each a connection option for the outer casing.
- the reference element is a shadow edge 35 of the push bar 20 and the position sensor is a light barrier-like arrangement consisting of the previously described light source 33 in cooperation with the row of photosensitive cells 32, which detects the position of the shadow edge 35 optically and thus without contact by the shadowing. Since the push rod 19 ensures the actual connection and adhesion to the membrane 13 and push bar and push rod are firmly connected in the present example, the following description always refers to the movement of the push rod 19, although in fact the shadow edge 35 of the push bar 20 is measured ,
- the position sensor 36 outputs an actual signal x 1 which is proportional to the position of the reference element 35.
- this is derived in the exemplary embodiment by a differentiator 37 in time (dx I / dt) and thus additionally a speed-proportional actual signal v I formed.
- a time profile for the desired value 38 of the position x S or the speed v S is specified.
- PID controller controller with proportional, integral and differential components.
- the manipulated variable SG corresponds to a request value for the drive power.
- the manipulated variable SG is further processed by a position correction 41.
- the position correction 41 takes into account the fact that the speed of the motor is converted into a speed at the push rod, depending on the rotational angle position of the eccentric (to be deduced from the push rod position) in accordance with the sinusoidal characteristic of the eccentric drive.
- the position correction 41 calculates the output signal of the PID controller 40 via the inverse characteristic of the eccentric gear in a corrected manipulated variable KSG, which represents based on the input of the reduction gear 11, the necessary motor control, which is required to at the output of Exzentergetriebes to obtain a movement of the push rod 19 corresponding to the desired manipulated variable SG.
- An amplifier 42 which is designed as a frequency converter, includes the power switching stages and controls the motor according to the requested speed with the associated voltage and frequency.
- the amount of the position-dependent position correction, the conversion of the corrected manipulated variable KSG in a specific speed specification for the frequency converter and possibly the derivative constant for the formation of the speed signal v l are determined by the three proportionality factors k1, k2, k3.
- the factor for the position-dependent position correction k1 is to be selected in accordance with the characteristic of the eccentric gear, the two factors k2 for the power amplifier and k3 for the derivative of the speed signal can be selected based on practical considerations, such as working with as good manageable value ranges of the associated variables ,
- control loop for a position controller in Fig. 4, the control loop is shown schematically when used as a speed controller.
- the described control circuit sets the predetermined time profile for the desired value of the position x S or the speed v S , of course within the scope of its possible control accuracy.
- the membrane position can be controlled directly. This function makes it possible to selectively approach specific positions in selected dosing phases and, if necessary, to maintain them at standstill.
- Dosing pumps according to the prior art often provide a mode in which the dosing strokes carried out over the set volume of the displacement chamber (stroke length) are converted directly into a metered total volume and this. is displayed as volume flow in the unit l / h.
- stroke length the dosing strokes carried out over the set volume of the displacement chamber
- the position of the Hubverstellinnate must be converted for this purpose in metering pumps of previous design by a separate sensor into an electrical signal and read into the controller.
- An example of a practical realization would be a linear potentiometer on Hubverstellorgan 7, which scans its setting via a plunger.
- a metering pump that can detect the actually worn membrane path during the stroke using integrated position sensor 36 does not require an additional sensor. By subtraction of the two position values in the end positions, each after reaching the mechanical Can be measured stop, as soon as the movement has come to a halt, the stroke length can be calculated directly and is available for further processing.
- sensors are often used which emit a feedback pulse to the electronic controller for monitoring the metering movement per stroke.
- a known embodiment is e.g. a small permanent magnet, which is attached to the output shaft of the transmission, so on the eccentric shaft 17 outside the axis and rotates with this, in conjunction with a fixed Hall sensor that generates a signal when passing the magnet in a certain angular position of the eccentric shaft. Based on this signal, the electronic control measures the stroke period, which is identical to the cycle time of the eccentric shaft, and deduces from this a trouble-free sequence of the dosing process. In the event of a blockage in the course of the metering stroke due to an overpressure situation, e.g.
- the signal of the Hall sensor remains off and, after a monitoring period has elapsed, leads to a fault message and further reactions, e.g. Shutting down the dosing pump.
- the desired information is available only after the expiry of the monitoring time.
- the speed of the push rod 19 can be set in relation to the drive of the motor 2 at any time of Dosierhubs, and a blockage can be detected virtually instantaneously.
- Is used as drive motor 2 e.g. an asynchronous motor is used
- the effective mechanical speed at the motor output shaft under load is always slightly smaller than specified by the frequency of the electrical control.
- the difference between the two speeds, the so-called slip is dependent on parameters of the motor and within a reasonable load range approximately proportional to the load torque.
- the slip can be measured by various methods described below. From it, a correction value can be calculated, which can be included in the use of a frequency converter in the predetermined engine speed in the form of a frequency increase and thus compensated.
- the slip can be determined, for example, by comparing the measured stroke period with the predetermined by the electrical control.
- This method is also used in metering pumps according to the prior art by measuring the time interval between two Hall sensor pulses applied.
- a characteristic point along the stroke for example at halfway, is defined for period duration measurement, and the time at which this point is traversed is recorded for successive metering operations; the time difference between two such times is the period of the search.
- a more direct method for slip detection works with the observation of the instantaneous speed of push rod 19. From the motor speed predetermined by the electric drive, an ideal push rod speed can be calculated at any time via the known transmission and eccentric characteristics. By comparing the ideal and the measured speed, the slip can be determined at any time during the eccentric revolution and corrected by readjusting the frequency of the motor control.
- the force acting on the displacement element can be determined with the help of the slip determined according to one of the previously described methods, thus making it possible to draw conclusions about the working pressure of the metering medium.
- the eccentric transmits the force acting on the push rod 19 according to its sinusoidal characteristic depending on the instantaneous angular position via the gear 11 to the motor 2.
- the motor is decoupled from the push rod force, i. load-free, in the two points exactly in between the eccentric transmits the load torque maximum to the engine. Accordingly, assuming a constant push rod force, the torque to be applied to the motor output shaft and thus also the slip will approximate to a sine function.
- the fluctuation range is an image of the push rod force.
- the deviation of the stroke period from the ideal value is determined, this represents the slip averaged over the sinusoidal curve of the eccentric, which in turn represents a measure of the average stroke rod force, ie the working pressure. If the slip continuously determined from the comparison of the predetermined by the electrical control motor speed with the push rod speed, using the known eccentric and the knowledge of the instantaneous angle of rotation of the eccentric, which follows from the push rod position, the temporal force curve at the push rod 19 can be calculated. From the force curve at the push rod, in turn, the working pressure can be derived.
- the working pressure is determined by one of the methods described, it can be monitored for compliance with certain limits, and if the monitoring is activated, fault messages and further reactions, such Shutting down the dosing pump to be triggered.
- Over-limit monitoring may be used to protect the pump or other equipment; Occasionally, a factory preset limit of e.g. However, the monitoring limit may also be within the specified operating range of the metering pump when, for example, 130% of the maximum pressure of the metering pump is exceeded. more sensitive parts of the system are to be protected, and in this case must be specified by the operator. It is also possible to monitor for maintenance of given operating conditions; In this case, a fault message, e.g.
- a prevailing working pressure for example indicated by an operator
- a percentage up or down If the working pressure is set to maintain a minimum pressure of e.g. 1 bar monitored, it is thus possible to detect a leak caused by damage in the piping.
- the exact dosing capacity of motor metering pumps is influenced differently by the working pressure.
- the drive motor 2 if it is designed, for example, as an asynchronous motor, with increasing working pressure with increasing slip, which has a speed drop and an associated reduced stroke frequency.
- a membrane 13 used as a displacement element undergoes an elastic deformation under the influence of the working pressure during the metering stroke.
- the internal pressure is continuously increased in the metering chamber 16 while the exhaust valve 15 is still closed by the diaphragm member 30 is moved by the push rod 19 under pressure in the metering chamber 16 and the elastic flexing region of the membrane 13 to the same extent yielding to the pressure recedes in opposite directions to the movement of the diaphragm core 30.
- the membrane 13 deforms in itself, but in total there is virtually no change in volume, which is due to the fact that the metering medium is virtually incompressible and at this time both valves are closed.
- the chamber pressure corresponds to the external working pressure.
- the distance traveled so far of the push rod 19 corresponds to the amount of membrane deformation, ie the dead zone at the beginning of the dosage, and practically does not contribute to the dosage.
- the deformation or the dead zone typically moves in a range of approx. 0.1-0.5mm depending on diaphragm size, working pressure, etc.
- At the point of pressure balance opens the pressure-side outlet valve 15.
- the pressure acting on the diaphragm 13 is virtually identical to the external working pressure and remains, as the diaphragm deformation, for the rest Part of the dosing stroke approximately constant.
- the point of pressure equilibrium at which the pressure-side outlet valve opens marks the actual beginning of the metering so that the amount of membrane deformation is lost to the metering stroke, ie the effective stroke length is calculated from the mechanically predetermined minus the membrane deformation. Since the membrane deformation itself increases more or less proportionally with the working pressure, the typical dependency is a falling metering performance curve with increasing working pressure. The resulting negative deviation becomes more pronounced the smaller the set stroke length.
- the working pressure is determined according to one of the previously described methods, it is possible, based on the described dependencies, which can be determined quantitatively in preliminary tests for one type of device, to predetermine and compensate for the error-producing influence of the working pressure on the metering performance.
- a correction value which is added to the set stroke frequency. It should be noted that under practical and economic aspects only the systematic part of the influence can be eliminated.
- the pressure-dependent metering performance error is mainly determined by the material properties and dimensions of the components involved, which change to some extent due to aging may or may be subject to specimen discrepancies in the production series.
- the proportional error in the partial stroke operation is also eliminated so that the dosing pump is practically over the full usable setting range the stroke length of eg 20% -100% can be operated without having to perform the previously necessary recalibrations, which in a conventional metering pump with an adjustment of the stroke length by more than e.g. 10% are necessary to ensure the specified metering accuracy.
- the function of controlling the velocity of the displacer, here the membrane 13, can be used in particular for highly viscous media (for example lecithin) to limit flow losses in valves and other bottlenecks.
- Highly viscous media for example lecithin
- High flow rates have a negative influence on the dosing accuracy in such media by additional pressure losses due to flow resistance.
- it is advantageous here if the limited speed allows more time for the defined opening and closing of the valves. Overall, both effects improve the dosing accuracy of highly viscous media.
- the membrane velocity is kept limited to a selectable maximum value during the entire dosing process. This maximum speed depends i.a. from the viscosity of the concrete to be metered medium and is e.g. to be selected by the operator in the form of several pre-defined values adapted to common use cases or specified directly.
- slightly outgassing media such as sodium hypochlorite
- slightly outgassing media can be particularly at the intake, but also in the metering at too high flow velocity at bottlenecks by local undershooting of the vapor pressure, including the chemical composition of the metering As well as its temperature depends, cavitation occur, which has increased wear.
- Cavitation can be avoided by the speed is limited by control or even by simple speed specification to values well below a critical flow rate both in the pressure stroke and during the suction, ie the return of the diaphragm 13.
- the speed specification for the control loop or, in the simple case, the engine speed is set for this purpose so that the membrane velocity corresponding to the medium velocity is limited to, for example, 1 mm / 50 ms.
- the suction is prone to the formation of cavitation, since the static pressure is particularly low and therefore the safety range to below the vapor pressure is very low.
- Sensible values are for example 1mm / 50ms in the pressure stroke or 1mm / 100ms during suction, but of course different values are possible.
- Essential for such an individual treatment of the metering phases is that with the help of the position sensor, the exact position of the membrane is known at all times and thus the beginning of the (particularly critical) suction phase can be reliably detected.
- the invention makes it possible to save the mechanical device for adjusting the stroke length (adjusting member 7 and Hubverstellbolzen 8).
- the control device the desired stroke length electronically, eg by an operator input, communicated. If the desired stroke length has been carried out, the reached position of the diaphragm 13 is held by braking the motor 2 and these are then returned to the intake in the reversed direction of rotation of the motor.
- the following stroke can be carried out by further rotation of the engine beyond the suction-side dead center with a reversed direction of rotation (printing phase in reverse operation, suction in normal operation) or in the same order as the previous stroke; in the former case, deceleration and starting operations of the engine between the strokes and the associated time and energy requirements can be saved.
- the permanent change of direction makes it impossible for a passive fan fixedly mounted on the motor shaft to fulfill its function sufficiently, so that the use of an externally driven fan is indispensable for the motor if it requires cooling measures.
- the available time which results from the repetition frequency of the metering strokes, can be divided so that the portion remaining after deduction of the suction duration is utilized to a maximum for the forward movement, except for a short rest phase.
- the speed to be controlled is calculated from the distance to be traveled (set stroke length) and the available time.
- the instantaneous angular position of the Exzentergetriebes be reckoned and included in the engine speed so that the characteristic of the deflection device, which is sinusoidal when using an eccentric, balanced and the metering can be performed as exactly linear movement with a correspondingly constant application of the metering.
- the speed can be in a very wide range of e.g. 1 mm / min to 1 mm / s and beyond.
- CCD charge coupled device
- the active sensor elements described in more detail in this embodiment, which detect the position, are arranged on the side of the push arm 20 directed to the dosing head.
- the light source 33 is an LED
- the optical receiver is an electronic module with a CCD line 32, which are mounted here together on an intermediate part, the sensor carrier 31.
- the mounting on the sensor carrier 31 makes it possible to treat the position sensor 36 in the production process as an independent module and, for example, separately pre-assemble and check its function outside the final installation site.
- the described photocell-like arrangement is a touch and thus wear-free working sensor.
- the CCD module 32 is driven by an evaluation unit which contains a microprocessor and generates the required control signals.
- the evaluation unit can also be realized by a DSP (Digital Signal Processor) or in discrete technology.
- each component is suitable, which has a sufficiently narrow confined spot. Together with the imaging geometry shown in more detail in FIG. 7, this determines the width of the shadow area SV, see FIG. also Fig. 8.
- the light source 33 It is also possible to use a plurality of elements or a line emitter as the light source 33, with the aid of which the shadow profile SV can be specifically designed according to particular aspects. As an example, the achievement of a higher brightness, without affecting the image sharpness in the direction of movement.
- the control signals which are generated by the evaluation unit determine the exposure time, during which the individual pixels of the CCD line 32 integrate the incident light in each case in a separate amplifier within the CCD chip and cache for later evaluation. This integration occurs not only over the exposure time, but also across the photosensitive area of each pixel. After the exposure, the brightness values belonging to the pixels are successively read out of the CCD module by further control signals as analog values and detected by the evaluation unit.
- Exposure and readout of the brightness values take place alternately in the simple case.
- some commercially available CCD line components also offer options for simultaneous execution of both processes, by temporarily buffering the integrated measured values after exposure and enabling the integrators immediately for a subsequent measurement. By simultaneously reading out the results of a measurement run during the exposure phase for the subsequent passage, the measurement speed can be increased.
- the integrated brightness values H are shown corresponding to the actual shadow profile in the area of the addressed pixels in the specific embodiment.
- the shadow area SV extends over the pixels # 60 to # 63 in this example.
- a decision threshold H v (shown in Figure 8 as the dashed line.) Arbitrarily set at, for example half the maximum brightness and searched for the one pixel whose brightness value H, first, the threshold below the shadow transition H v; in the example this would be Pixel # 62.
- the brightness profile may be in opposite directions from unlit to illuminated CCD cells with increasing pixel number; On the one hand, this depends on the arrangement of the elements light source 33, CCD module 32 and shadow body 35 and on the other hand on the internal organization of the CCD 32 used. In this case, the pixel whose brightness value at the shadow transition first exceeds the threshold is searched for.
- a position value is available.
- the total time requirement of the three phases determines the repetition rate at which position values are obtained.
- the measurement resolution is equal to the pixel pitch R of the CCD line, corrected by the imaging ratio A, which results from the mounting distance with the individual components.
- the imaging ratio A is calculated to be 1.065.
- This deviation can easily be eliminated by a one-time calibration, eg during production.
- the linearity is determined almost exclusively by the accuracy of the pixel grid within the chip geometry, deviations are thus negligible.
- the two pixels to the left and to the right of the decision threshold H V are searched for and the distances ⁇ H of the associated brightness values are evaluated from this threshold.
- the intersection is 61.7. If the brightness progression in the interpolation range follows an ideal straight line, then both calculation paths lead to the same result, so it is basically sufficient to carry out one of the two calculations. However, with this property, error contributions can be minimized by a not exactly straight brightness curve in the considered transition range or by always expected measurement inaccuracies, for example by performing both calculations and averaging their results.
- the conditions on both sides of the point of intersection with respect to unlit and illuminated CCD cells can be reversed; in this case If necessary, the directions on the left and right change their function and the interpolation equations must be adjusted accordingly.
- the brightness values of more than two pixels are used for the calculation.
- the position can then be determined by redundant multiple calculation and e.g. Averaging several results are formed.
- a different linear interpolation than shown here or an interpolation with the data other than the direct neighbor pixels can be used.
- Deviations and displacements of linear parameters affect the result only within the interpolation range.
- the steepness of the brightness gradient in the shadow transition resulting from the sharpness of the image of the shadow edge on the CCD plane, is of subordinate importance since it does not affect the interpolation within wide limits; only the linearity of the brightness curve is decisive for the accuracy of the interpolation.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Reciprocating Pumps (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
Abstract
Description
- Die Erfindung betrifft eine Motordosierpumpe gemäß dem Oberbegriff des Anspruch 1.
- Derartige Motordosierpumpen sind allgemein bekannt und werden durch Zusatzeinrichtungen den jeweiligen Anforderungen angepasst. Sie arbeiten nach dem volumetrischen Prinzip, bei dem der Dosiervorgang aus dem Transport eines abgeschlossenen Kammervolumens durch ein Verdrängungsorgan besteht. Das Dosiervolumen pro Hub entspricht dabei der Volumendifferenz bei der Bewegung des Verdrängungsorgans.
- Bei einer solchen Motordosierpumpe wird die im allgemeinen kontinuierliche Drehbewegung eines Antriebsmotors durch eine Getriebeeinheit in eine oszillierende Linearbewegung des Verdrängungsorgans umgesetzt. Die Drehzahl und das Drehmoment des Motors wird in einem Getriebe untersetzt und an die Geschwindigkeit und den Kraftbedarf des Verdrängungsorgans angepasst. Die Abgangswelle des Getriebes treibt eine Vorrichtung zur Umsetzung der Drehbewegung in eine seitliche Auslenkung, d.h. im rechten Winkel zur Drehachse, an, wie z.B. einen Feder-/Nocken- oder einen Exzenterantrieb. Die seitliche Auslenkbewegung betätigt eine Schubstange, die axial verschiebbar in Richtung der Auslenkbewegung in Lagern geführt ist. Diese überträgt die Bewegung und die Kraft auf das Verdrängungsorgan, welches in einem in der Längsachse der Schubstange angeordneten Dosierkopf in Zusammenwirken mit einem Auslass- und Einlassventil in abwechselnder Folge zu einem Pumphub (Druckhub) und einem Ansaughub und damit zu einer Förderung des Dosiermediums führt.
- Unterschiede verschiedener Ausführungsvarianten liegen zum einen in der Art des Motors; üblich sind Asynchronmotoren, Synchronmotoren und Schrittmotoren, die außerhalb oder innerhalb des eigentlichen Pumpengehäuses montiert sind. Weiter unterscheiden sich einzelne Dosierpumpentypen in der Ausführung des Getriebes, das ein Schneckengetriebe, ein Stirnradgetriebe oder ein Riemenantrieb sein kann. Der Antrieb der Schubstange durch die Auslenkvorrichtung kann zwangsgeführt oder auch einseitig formschlüssig nur beim Vorlaufen der Auslenkvorrichtung erfolgen. Die Schubstange wird im Druckhub durch die Auslenkvorrichtung angetrieben, zum Ansaugen hingegen wird sie im letztgenannten Fall durch eine Rückholfeder angetrieben, die sie an die zurücklaufende Auslenkvorrichtung spielfrei anlegt. Die Rückholfeder wird im Druckhub zusammengepresst und ist in ihrer Dimensionierung auf den Kraftbedarf beim Ansaugvorgang hin ausgelegt. Als weiteres Unterscheidungsmerkmal verschiedener Pumpentypen erfolgt die Krafteinkopplung von der Schubstange zu einer Membran als Verdrängungsorgan entweder durch eine starre Verbindung oder durch einen hydraulischen Zwischenkreis. Da die Hydraulikflüssigkeit, üblicherweise Öl, nicht komprimierbar ist, wirkt eine hydraulische Kopplung wie eine starre Verbindung. Neben dem hier beschriebenen System mit einem Dosierkopf sind auch Pumpenkonstruktionen bekannt, die mit zwei oder mehreren an einem gemeinsamen Antrieb betriebenen Dosierköpfen arbeiten. Zum einen können als Ausführungsbeispiel beidseitig eines Exzenters zwei gegenüberliegende Schubstangen in einer gemeinsamen Längsachse angeordnet sein, die gegenläufig betrieben werden und jeweils einen Dosierkopf mit einem eigenen Verdrängungsorgan antreiben. Zum anderen arbeitet ein weiteres bekanntes Prinzip mit Mehrfachdosierköpfen mit einer verlängerten Exzenterwelle, die mehrere gemeinsam angetriebene Exzenter trägt, die wiederum jeder für sich eine zugeordnete Einheit aus quer zur Exzenterachse angeordneter Schubstange und in Richtung der Schubstangenachse liegendem Dosierkopf mit Verdrängungsorgan antreibt.
- Alle beweglichen Teile sind im einfachen Fall in einem gemeinsamen Pumpengehäuse durch Kugel-oder Gleitlager gelagert, in anderen Ausführungen sind einzelne Funktionsgruppen in weiteren Gehäuse- oder Montageteilen, die teilweise auch ölgefüllt sind, zu Funktionsgruppen zusammengefasst und als Baueinheiten montiert. Ein Beispiel hierfür wäre eine außerhalb des Pumpengehäuses montierte Einheit aus Motor und Untersetzungsgetriebe mit Montageflansch und bereits untersetzter Abgangswelle.
- Im einfachen Fall wird der Antriebsmotor für eine fortlaufende Dosierung kontinuierlich oder zum Ausführen einzelner Dosierhübe für eine bestimmte Zeit eingeschaltet. Andere Ausführungen steuern den Antriebsmotor über einen Frequenzumrichter nach einem vorgegebenen zeitlichen Profil an, wodurch die Motordrehzahl und damit die Dosierleistung besser reproduzierbar und unabhängig von elektrischen Parametern wie z.B. der Frequenz oder der aktuellen Höhe der Netzspannung wird.
- Die Motordrehzahl wird durch die elektrische Frequenz der Motoransteuerung vorgegeben und bestimmt zusammen mit der Getriebeuntersetzung und der Getriebecharakteristik, die bei einem Exzentergetriebe sinusförmig ist, die Zeitdauer eines jeden Hubs. Bei kontinuierlicher Ansteuerung ergibt sich die Zeitdauer pro Hub aus der effektiven Motordrehzahl im Belastungszustand und der Getriebeuntersetzung. Im sogenannten Ein-/Ausschaltbetrieb, bei dem Einzelhübe oder Hubpakete abgearbeitet werden, zwischen denen der Motor definiert, z.B. im Ansaugtotpunkt, angehalten wird, kommen Anlauf- und Bremszeiten hinzu und verlängern die Zeitdauer pro Hub entsprechend. Die Hubfrequenz wird im kontinuierlichen Betrieb durch die Zeitdauer pro Hub bzw. im Ein-/Ausschaltbetrieb durch die Folgefrequenz der Motoreinschaltungen vorgegeben, die natürlich nicht häufiger erfolgen können, als es die benötigte Zeit zum Ausführen eines Hubs vorgibt.
- Die Hublänge kann durch Begrenzung der seitlichen Auslenkung eingestellt werden. Dies kann zum einen durch Verstellen einer Exzentrizität geschehen, z.B. durch Verwendung sogenannter Taumelzylinder, die auf der Basis zweier gegeneinander verdrehbarer schiefer Ebenen arbeiten. Zum anderen ist als weitere Möglichkeit ein verstellbarer Anschlag üblich, der bei nicht zwangsgeführten Auslenksystemen einsetzbar ist. Dieser Anschlag in Form einer mechanisch verstellbaren Spindel begrenzt bei entsprechender Einstellung die Rückwärtsbewegung der Schubstange beim Ansaugen auf eine einstellbare Position vor Erreichen des hinteren Totpunkts der Auslenkvorrichtung. Durch den Anschlag wird der Startpunkt der Hubbewegung vorgegeben; die Endlage ergibt sich bei vollständig ausgeführter Auslenkbewegung. Eine mögliche Ausführung ist, einen Hubverstellbolzen mit von der Gerätebedienseite zugänglichem Drehknopf und Skala in ein Gewinde des Pumpengehäuses einzuschrauben, der den Anschlag für die Schubstange beim Ansaugen darstellt. Bei hydraulischen Systemen wird die Hubverstellung z.B. durch eine verschiebbare Muffe realisiert, deren Position durch einen von der Gerätebedienseite zugänglichen Drehknopf mit Skala einstellbar ist, der in einem Gewinde des Pumpengehäuses eingeschraubt ist. Die Muffe deckt eine Bypassbohrung in der Schubstange ab, die nach Abfahren eines bestimmten Wegs einen Nebenschluss des Ölkreislaufs freigibt und so die Kraftkopplung von der Schubstange zur Membran aufhebt.
- Der Bewegungsablauf des Verdrängungsorgans ergibt sich aus dem Zusammenspiel der Getriebe- und sonstigen mechanischen Komponenten. Während der Vorwärtsbewegung arbeitet der Antrieb gegen die durch das Verdrängungsorgan und die (fallweise vorhandene) Rückholfeder auf die Schubstange wirkende Kraft. Während der Rückwärtsbewegung wird die Schubstange bei zwangsgeführtem Auslenksystem ebenfalls durch den Antrieb zurückgezogen, bei einseitiger Betätigung drückt die Rückholfeder die Schubstange zurück und bringt dabei die Kraft für das Ansaugen des Dosiermediums auf. Die Bewegung der Schubstange folgt dabei der Charakteristik der Auslenkvorrichtung; bei einem Exzenter ist dies z.B. ein sinusförmiger Verlauf, der bei voller Hublänge zwischen den beiden Totpunkten des Exzenterhubs liegt. Im Betrieb mit reduzierter Hublänge ist die Bewegung bei Verstellung einer Exzentrizität weiterhin rein sinusförmig mit reduzierter Amplitude, bei starr gekoppelten Systemen mit verstellbarem Anschlag bzw. hydraulischen Systemen mit Bypassbohrung bleibt der ursprüngliche Bewegungsablauf und die Amplitude der Auslenkvorrichtung erhalten, wird jedoch nicht mehr vollständig ausgeführt; vielmehr ist die Schubstangenbewegung je nach eingestellter Hublänge und Kopplungssystem im Anfangs- bzw. im Endbereich abgeschnitten (Phasenanschnitt). Die Vorwärtsbewegung zur Ausführung des Druckhubs spielt sich je nach Ansteuerung des Motors in einem Zeitbereich deutlich unterhalb einer Sekunde ab (z.B. im Bereich um 200ms), der Ansaughub erfolgt ebenfalls nach einem durch die Auslenkvorrichtung vorgegebenen Verlauf innerhalb ähnlicher Zeit wie der Druckhub. Daraus resultieren in beiden Hubphasen relativ hohe Momentangeschwindigkeiten des Dosiermediums; bei einem Exzenterantrieb liegt das Maximum jeweils etwa auf halber Strecke der Bewegung.
- Bei Ausführungen, bei denen mehrere Einheiten, bestehend aus Schubstange und Dosierkopf, von einer gemeinsamen, mit mehreren Exzentern arbeitenden Exzenterwelle angetrieben werden, können diese Exzenter phasenversetzt auf der Welle angeordnet sein, um den jeweiligen Spitzenkraftbedarf der einzelnen Dosierköpfe zeitlich auf eine volle Drehung der Exzenterwelle zu verteilen und so die zur Verfügung stehende Motorkraft optimal auszunützen.
- Bestimmte Ausführungen, sog. Membrandosierpumpen, haben als Verdrängungsorgan eine teilflexible Membran. Diese ist nicht starr, sondern verformt sich im Walkbereich elastisch um einen bestimmten Betrag, wenn der Druck des Dosiermediums auf sie einwirkt. Der Betrag dieser Verformung, die in einem ersten, für die Dosierung ungenutzten Teil der Hubbewegung aufgebaut wird, geht der effektiv ausgeführten Hubbewegung verloren und führt dazu, dass die Dosiermenge bei zunehmendem Arbeitsdruck abnimmt. Diese fallende Charakteristik ist in normalen Anwendungen deutlich stärker ausgeprägt als es die geforderte Dosiergenauigkeit zulassen würde. Motordosierpumpen können daher üblicherweise nicht in einer allgemeinen Einstellung über einen weiten Bereich des Arbeitsdrucks mit der gewünschten Genauigkeit betrieben werden; vielmehr wird der auftretende Fehler durch eine Kalibriermessung erfasst und in die weiteren Berechnungen mit einbezogen. Diese Kalibriermessung muss jedoch in der konkreten Anwendung unter realen Arbeitsbedingungen erfolgen und ist insbesondere in Verbindung mit aggressiven Chemikalien ein Arbeitsschritt, der erheblichen Aufwand mit sich bringt.
- Derzeit allgemein übliche Motordosierpumpen sind zwar leistungsfähig und weisen für viele Prozesse günstige Dosiereigenschaften auf, haben aber dennoch Nachteile in bezug auf die hydraulischen Eigenschaften des Dosiervorgangs gegenüber dem wünschenswerten Idealzustand. Als Beispiel seien hier die relativ starke Abhängigkeit der dosierten Menge vom Arbeitsdruck des Dosierkreislaufs und Nachteile wie Fließgeräusche bzw. Druckverluste durch hohe momentane Strömungsgeschwindigkeiten des Dosiermediums genannt.
- Aufgabe der vorliegenden Erfindung ist insbesondere, die bekannten Nachteile in bezug auf die hydraulischen Eigenschaften des Dosiervorgangs zu beseitigen und dadurch einen variablen, größeren Einsatzbereich der Motordosierpumpen zu erzielen, ohne deren Herstellungsaufwand negativ zu beeinflussen. Weiterhin soll der Bewegungsvorgang der Schubstange und des damit verbundenen Verdrängungsorgans so den Soll-Angaben angepasst werden, dass sowohl der Dosiervorgang selbst einstellbar ist, als auch die durch Fertigungstechnik oder nachteilige Eigenschaften von Bauteilen (z.B. der elastischen Membran, falls vorhanden) entstehenden Fehler durch die elektronische Steuerung berücksichtigbar und behebbar sind. Durch diese Maßnahmen soll die exakte Dosierung eines vorgegebenen Volumens eines Dosiermediums bei einem Dosiervorgang durch Vermeidung bzw. Erkennung fehlerhafter Betriebszustände sichergestellt werden und Fertigungs- und/oder in der Nutzung auftretende Ungenauigkeiten durch die eingesetzte Elektronik ausgleichbar sein.
- Die Lösung der Aufgabe besteht darin, dass mit der Schubstange ein Bezugselement verbunden ist, dessen Position von einem Positionssensor abgetastet wird, wobei der Positionssensor ein Ist-Signal (xl) abgibt, welches zur Position des Bezugselements und damit des Verdrängungsorgans in einer festen Beziehung steht und mit dessen Hilfe Kenntnis über den Bewegungsablauf des Verdrängungsorgans gewonnen wird, so dass die elektronische Steuerung der Dosierpumpe auf Betriebszustände des Dosierkreises und der Pumpe reagieren kann.
- Mit Hilfe des Positionssensors wird die Bewegung der Schubstange erfasst und durch die elektronische Steuerung ausgewertet. Hierzu untersucht die Steuerung ausgehend von den Rahmenbedingungen den Bewegungsablauf auf jeweils charakteristische Merkmale und reagiert darauf mithilfe einer Beeinflussung der Motoransteuerung so, dass die Dosierung der Vorgabe möglichst gut folgt und die sonst z.B. durch die Eigenschaften der Membran entstehenden Ungenauigkeiten eliminiert werden.
- Arbeitet der Positionssensor nach einem berührungsfreien Prinzip, wird ein verschleißfreier Betrieb des Sensors sichergestellt, was angesichts der hohen Anzahl von Hüben während der Lebensdauer einer Dosierpumpe vorteilhaft und letztlich erforderlich ist.
- Ist das mit der Schubstange verbundene Positionselement außerhalb des Dosierkopfes angeordnet, wird damit eine größere Flexibilität bezüglich des Montageraums für den Positionssensor erreicht.
- Beeinflusst das Bezugselement den Strahlengang einer Lichtquelle und arbeitet der mit ihm zusammenwirkende Positionssensor, der im Pumpengehäuse oder an einem sonstigen ruhenden Teil fest angeordnet ist, nach einem lichtempfindlichen Empfängerprinzip, ist zum einen ein verschleißfreier Betrieb sichergestellt, wie er angesichts der hohen Anzahl von Hüben während der Lebensdauer einer Dosierpumpe unerlässlich ist, und die bewegten Teile werden berührungsfrei abgetastet. Ein weiterer Vorteil dieser Anordnung ist, dass eine derartige Ausbildung eines Positionssensors prinzipiell unempfindlich gegenüber magnetischen Streufeldern ist.
- Ist das Bezugselement ein Schattenkörper bzw. eine schattengebende Kontur und besteht der mit ihm zusammenwirkende Positionssensor, der im Pumpengehäuse oder an einem sonstigen ruhenden Teil fest angeordnet ist, aus einer Reihe lichtempfindlicher ladungsgekoppelter Empfängerzellen (sog. CCD-Zellen; charge coupled device), hat eine derartige Anordnung auf optischer Basis wichtige Eigenschaften, die der Positionssensor erfüllen muss. Zum einen arbeitet die Anordnung aufgrund des optischen Funktionsprinzips verschleißfrei und ist unempfindlich gegenüber magnetischen Streufeldern, zum anderen weist ein derartig ausgebildeter Sensor praktisch keinen Linearitätsfehler auf.
- Ist der Positionssensor weiterhin auf einem eigenen Sensorträger angeordnet, der mit dem Pumpengehäuse oder einem sonstigen ruhenden Teil fest verbunden ist, kann eine solche Anordnung als Baueinheit vormontiert und geprüft werden und erleichtert so die Montage. Wird der Sensorträger als Teil aus nicht nichtleitendem Kunststoff ausgeführt, wird dadurch zusätzlich die elektrische Isolation der Sensorbauteile gegen metallische Teile des Gehäuses bzw. des Getriebes vereinfacht.
- Stellen die Lichtquelle, der Schattenkörper bzw. die schattengebende Kontur und der Empfänger eine lichtschrankenähnliche Anordnung dar und werden die Messwerte kontinuierlich oder taktweise der elektronischen Steuerung zugeführt, stellt eine solche Anordnung der elektronischen Steuerung mit einer den Anforderungen gerechten Geschwindigkeit die Positionsdaten zur Verfügung.
- Besteht der optische Empfänger des Positionssensor aus einer Anzahl linear angeordneter Empfänger (Pixels), vorzugsweise 128 Pixels, so kann eine solche Anordnung auf einfache Weise die Position durch Auszählen der Schattengrenze zwischen beleuchteten und unbeleuchteten Zellen ermitteln und erreicht bereits mit dieser einfachen Methode eine Auflösung entsprechend dem Abstand der Zellen des verwendeten Empfängerbausteins.
- Ist die Lichtquelle eine Leuchtdiode (LED), die so gegenüber dem optischen Empfänger des Positionssensor angeordnet ist, dass deren Lichtstrahlenbündel auf dem direkten Weg zum Empfänger durch die Schubstange nicht behindert wird, hat dies den Vorteil, dass die preiswerte LED einen annähernd punktförmigen Leuchtfleck besitzt, der für eine hohe optische Auflösung unerlässlich ist, und praktisch eine nahezu unendliche Lebensdauer aufweist. Die Anordnung gegenüber dem Positionssensor an der Schubstange vorbei ergibt einen großen Abstand zwischen Lichtquelle und Empfänger, der den Projektionswinkel des relevanten Lichtstrahls relativ unabhängig von der Montageposition der Elemente macht.
- Wird der Ausgangswert des Positionssensors durch Interpolation der Helligkeitswerte mehrerer im Schattenübergangsbereich liegender Pixels gebildet, so wird für das Ausgangssignal des Positionssensors eine feinere Auflösung erreicht, als sie durch das mechanische Raster der Zellen des CCD-Empfängers vorgegeben ist.
- Werden bei der Verarbeitung der Signale des Positionssensors Filtermaßnahmen eingesetzt, so wird die Störimmunität des Positionssensors verbessert.
- Die Empfindlichkeit des Positionssensors gegenüber Montageabweichungen und mechanische Verschiebungen während des Betriebs, z.B. durch Erwärmung oder Lagerverschleiß, wird verringert, wenn Nulllagefehler des Positionssensors mittels eines Referenzspeichers bzw. Skalierungsfehler des Positionssensors durch Anfahren einer oder mehrerer Referenzpositionen eliminiert werden.
- Werden Belichtungsschwankungen des Positionssensors durch eine Steuerung oder Regelung der Lichtquelle anhand der gewonnenen Helligkeitswerte der Pixels ausgeglichen, verringert dies die Empfindlichkeit des Positionssensors gegenüber Schwankungen von Bauteileparametern.
- Werden Helligkeitsschwankungen zwischen einzelnen Pixels des optischen Empfängers durch Einbeziehen eines Referenzspeichers für die Empfindlichkeit jedes Pixels kompensiert, verringert dies die Auswirkungen von Verschmutzungen des optischen Empfängers.
- Erfolgt die Erkennung, auf welchen Wert das Hubverstellorgan eingestellt ist, durch Messung während der Dosierung unmittelbar über den Positionssensor, kann der ansonsten zusätzlich notwendige Sensor für die mechanische Stellung der zugehörigen Einstellelemente entfallen.
- Erkennt die elektronische Steuerung durch Auswertung des Positionssensorsignals eine Blockade des Verdrängungsorgans bzw. einen unvollständig ausgeführten Hub, erhöht dies die Zuverlässigkeit der Dosierung. Bei Dosierpumpen herkömmlicher Bauart ohne Positionssensor werden oft Sensoren eingesetzt, die zur Überwachung der Dosierbewegung z.B. beim Passieren einer Referenzmarke pro Hub einen Rückmeldeimpuls an die elektronische Steuerung abgeben, woraus die Hubperiodendauer gemessen und ein störungsfreier Ablauf des Dosiervorgangs abgeleitet werden kann. Gegenüber solchen Sensoren hat die beschriebene Verwendung eines Positionssensors den Vorteil, dass die gewünschte Information zu jedem Zeitpunkt des Dosierhubs vorliegt, und nicht nur beim Passieren der Referenzmarke, so dass solche zusätzlichen Sensoren ohne Nachteil entfallen können.
- Arbeitet der Antriebsmotor nach einem schlupfbehafteten Prinzip, indem z.B. ein Asynchronmotor eingesetzt wird, und ermittelt die elektronische Steuerung aus der durch die Ansteuerung vorgegebenen Solldrehzahl des Antriebsmotors und der bekannten Getriebecharakteristik eine Sollhubfrequenz bzw. eine Sollhubperiode für das Verdrängungsorgan und erfasst sie zusätzlich durch Auswertung des Positionssensorsignals die tatsächliche Hubfrequenz bzw. die tatsächliche Hubperiode des Verdrängungsorgans, wobei sie durch Vergleich der tatsächlichen Hubfrequenz mit der Sollhubfrequenz bzw. der tatsächlichen Hubperiode mit der Sollhubperiode des Verdrängungsorgans den Schlupf des Antriebsmotors errechnet und dessen Solldrehzahl so verändert, dass sich das Verdrängungsorgan letztendlich mit der gewünschten Hubfrequenz bewegt, verbessert dies die Genauigkeit der Dosierung durch Eliminieren des Fehlers in der Hubfrequenz, der durch den Schlupf des Antriebsmotors hervorgerufen würde. Bei Dosierpumpen herkömmlicher Bauart ohne Positionssensor werden oft Sensoren eingesetzt, die zur Überwachung der Dosierbewegung z.B. beim Passieren einer Referenzmarke pro Hub einen Rückmeldeimpuls an die elektronische Steuerung abgeben, woraus ebenfalls die Hubperiodendauer gemessen und korrigiert werden kann; solche zusätzlichen Sensoren können bei Verwendung eines Positionssensors entfallen.
- Arbeitet der Antriebsmotor nach einem schlupfbehafteten Prinzip, indem z.B. ein Asynchronmotor eingesetzt wird, und ermittelt die elektronische Steuerung aus der durch die Ansteuerung vorgegebenen Solldrehzahl des Antriebsmotors und der bekannten Getriebecharakteristik eine Sollhubfrequenz bzw. eine Sollhubperiode für das Verdrängungsorgan und erfasst zusätzlich durch Auswertung des Positionssensorsignals die tatsächliche Hubfrequenz bzw. die tatsächliche Hubperiode des Verdrängungsorgans, wobei sie durch Vergleich der tatsächlichen Hubfrequenz mit der Sollhubfrequenz bzw. der tatsächlichen Hubperiode mit der Sollhubperiode des Verdrängungsorgans den Schlupf des Antriebsmotors errechnet und ermittelt weiter die elektronische Steuerung aus dem so ermittelten Schlupf des Antriebsmotors und der bekannten Getriebecharakteristik die auf das Verdrängungsorgan wirkende Kraft und nimmt so einen Rückschluss auf den Arbeitsdruck des Dosiermediums vor, können mit dieser Information Überwachungs- und Kompensationsfunktionen realisiert werden, die die Zuverlässigkeit sowie die Genauigkeit der Dosierung verbessern. Ermittelt die elektronische Steuerung aus der durch die Ansteuerung vorgegebenen Solldrehzahl des Antriebsmotors und der bekannten Getriebecharakteristik für jeden Moment des Dosiervorgangs eine Sollgeschwindigkeit für das Verdrängungsorgan und erfasst sie zusätzlich durch Auswertung des Positionssensorsignals die tatsächliche Geschwindigkeit des Verdrängungsorgans, wobei sie durch Vergleich der tatsächlichen Momentangeschwindigkeit mit der Sollgeschwindigkeit des Verdrängungsorgans den momentanen Schlupf des Antriebsmotors errechnet und daraus, wiederum in Zusammenhang mit der bekannten Getriebecharakteristik, auf den momentanen Kraftverlauf am Verdrängungsorgan schließt, so liegt die gewünschte Information über den Kraftverlauf zu jedem Zeitpunkt des Dosiervorgangs vor und die angestrebten Überwachungs- und Kompensationsfunktionen können zeitlich differenzierter erfolgen, was die Zuverlässigkeit sowie die Genauigkeit der Dosierung weiter verbessert.
- Nimmt die elektronische Steuerung aus dem beobachteten Kraftverlauf am Verdrängungsorgan einen Rückschluss auf den Arbeitsdruck des Dosiermediums vor, so kann bekannten schädlichen Auswirkungen des Arbeitsdrucks auf den Dosiervorgang entgegengewirkt werden.
- Erkennt die elektronische Steuerung aus dem ermittelten Arbeitsdruck des Dosiermediums einen Betrieb außerhalb des spezifizierten Druckbereichs und stellt sie die Dosierung bei Überschreiten eines durch die Spezifikation der Dosierpumpe bzw. durch eine Benutzereingabe vorgegebenen maximal zulässigen Drucks bzw. bei Unterschreiten eines vorgegebenen Minimaldrucks ein, so werden fehlerhafte Betriebszustände wie Überdrucksituationen bzw. Druckverlust durch eine defekte Verrohrung erkannt und es können Sicherheitsmaßnahmen wie z.B. das Einstellen der Dosierung ergriffen werden, was die Zuverlässigkeit der Dosierung verbessert. Die sonst notwendigen zusätzlichen Betriebsmittel wie z.B. Überdruckbegrenzer können hierdurch eingespart werden, sofern die Dosierpumpe das einzige druckerhöhende Aggregat im Prozess ist. Die Möglichkeit, den Arbeitsdruck auch auf Werte innerhalb des spezifizierten Druckbereichs der Dosierpumpe zu kontrollieren, erweitert die Möglichkeiten der Drucküberwachung auf Situationen, in denen das Überwachungssystem herkömmlicher Dosierpumpen, welches erst bei einer Blockade der Dosierpumpe anspricht, nicht einsetzbar ist.
- Ist das Verdrängungsorgan eine teilweise elastische Membran und ermittelt die elektronische Steuerung aus dem gemessenen Arbeitsdruck des Dosiermediums und der bekannten Abhängigkeit der Dosierleistung vom Arbeitsdruck, die von der elastischen Verformung der Membran verursacht wird, einen zu erwartenden Dosierfehler, und beeinflusst sie die Drehzahl des Antriebsmotors und damit die Hubfrequenz so, dass diesem zu erwartenden Dosierfehler entgegengewirkt wird, so verbessert dies die Genauigkeit der Dosierung.
- Beeinflusst das aus dem Positionssensor ausgelesene Signal (xI) für die Position der Schubstange über einen Regelkreis im Rahmen seiner Regelgenauigkeit die Drehzahl des Antriebsmotors und als Folge die Linearbewegung der Schubstange und damit des Verdrängungsorgans so, dass sie einem vorgegebenen Sollwertprofil folgt, so kann diese gezielte Beeinflussbarkeit der Bewegung des Verdrängungsorgans zum Erreichen bzw. zur Verbesserung vorteilhafter hydraulischer Eigenschaften der Dosierung, z.B. bei der Langsamdosierung und/oder der Dosiergenauigkeit im Teilhubbereich, ausgenutzt werden.
- Besitzt die Dosierpumpe zusätzlich zu dem Positionssensor eine Regeleinrichtung und beeinflusst diese alternativ die Position (im folgenden xI genannt), die Geschwindigkeit (im folgenden vI genannt) oder die Beschleunigung des Verdrängungsorgans über eine Regeleinrichtung durch Veränderung der Drehzahl des Antriebsmotors beeinflusst, können passend zu den Anforderungen einer konkreten Dosieraufgabe gezielt die Vorteile der jeweils geeigneteren Regelmethode genutzt werden. Eine Regelung der Geschwindigkeit erlaubt eine direkte Kontrolle der tatsächlichen Fließgeschwindigkeit des Dosiermediums, die z.B. für das verlangsamte Ansaugen zum Vermeiden von Kavitation erforderlich ist. Eine Regelung der Position erlaubt hingegen Situationen nahe des Stillstands zu kontrollieren, bei denen die Geschwindigkeitsinformationen, die durch Differenzieren des Wegsignals gebildet werden, sehr klein werden und durch die Regeleinrichtung nicht mehr sinnvoll verarbeitet werden können. Die Regelung der Position umgeht diese Schwierigkeit und ist z.B. bei der elektronischen Hublängenbegrenzung oder der Langsamdosierung vorteilhaft anzuwenden. Die Regelung der Beschleunigung ist vorteilhaft für eine leichte Beherrschbarkeit der Regelung, da die Beschleunigung der bewegten Massen für schnelle Vorgänge ein direktes Abbild der Motorkraft darstellt.
- Besitzt die Dosierpumpe zusätzlich zu dem Positionssensor eine Regeleinrichtung und setzt diese vI des Verdrängungsorgans in der Ansaugphase und/oder in der Druckphase gezielt herab, so wird damit Druckverlusten, die durch Strömungswiderstände verursacht werden, bzw. dem Entstehen von Kavitation entgegengewirkt. Bei der Dosierung hochviskoser Medien, z.B. von Lecithin, entstehen an Engstellen wie z.B. in den Ventilen bei zu hoher Strömungsgeschwindigkeit hohe Druckverluste. Diese Druckverluste müssen in Form einer zusätzlichen Kraft durch den Antrieb aufgebracht werden und können bei Anwendung der Regelung von vl des Verdrängungsorgans niedrig gehalten werden. Zusätzlich werden Fließgeräusche bei herabgesetzter Strömungsgeschwindigkeit wirksam verringert. Bei der Dosierung leicht ausgasender Medien, z.B. von Chlorbleichlauge, tritt insbesondere während des Ansaugens bei zu hoher Strömungsgeschwindigkeit durch Unterschreiten des Dampfdrucks des Dosiermediums Kavitation auf, die erhöhten mechanischen Verschleiß zur Folge hat. Bei einer Regelung von vl des Verdrängungsorgans in der Ansaugphase und/oder in der Druckphase wird dies vorteilhaft vermieden.
- Besitzt die Dosierpumpe zusätzlich zu dem Positionssensor eine Regeleinrichtung und wird die gewünschte Hublänge durch eine Bedienervorgabe der Regeleinrichtung mitgeteilt und durch die Regeleinrichtung die Bewegung des Verdrängungsorgans elektronisch auf die auszuführende Hublänge begrenzt, indem die Regeleinrichtung den Antriebsmotor nach Ausführen der gewünschten Hublänge anhält, in den Reversierbetrieb umschaltet und so im Anschluss einen Ansaughub durchführt und den Motor dann anhält bzw. den darauffolgenden Druckhub ausführt, können grundsätzlich die zugehörigen mechanischen Einstellelemente entfallen.
- Besitzt die Dosierpumpe zusätzlich zu dem Positionssensor eine Regeleinrichtung und verteilt die Regeleinrichtung die Vorwärtsbewegung des Verdrängungsorgans während der Druckphase durch Ansteuern des Antriebsmotors so auf die durch die Folgefrequenz der Dosierhübe vorgegebene Zeit, dass die Ausbringung des Dosiermediums möglichst gleichmäßig erfolgt, bis hin zu sehr langsam ausgeführten Dosierhüben von z.B. einigen Minuten, können Konzentrationsschwankungen des Dosiermediums weitgehend vermieden werden.
- Die Dosiergenauigkeit wird verbessert, wenn das Verdrängungsorgan eine teilweise elastische Membran ist und die elektronische Steuerung aus dem momentanen Kraftverlauf an der Membran das Öffnen des Auslassventils erkennt und mithilfe dieser Beobachtung den Totbereich, der aufgrund der elastischen Verformung der Membran entsteht, misst und den tatsächlich ausgeführten Hubweg durch gezieltes Beenden der Hubbewegung abhängig von der ermittelten Membranverformung so beeinflusst, dass die Abhängigkeit der Dosiermenge vom Gegendruck wesentlich vermindert wird. Diese Verbesserung wird durch Eliminieren des Fehlers erreicht, der durch die elastische Verformung der Membran unter Einwirkung des Arbeitsdrucks dadurch entsteht, dass der Betrag dieser Verformung nicht zur Dosierung beiträgt. Durch die verminderte Abhängigkeit der Dosiermenge vom Arbeitsdruck können Nachkalibrierungen, die sonst bei signifikanter Veränderung von Betriebsparametem wie z.B. dem Arbeitsdruck erforderlich sind, entfallen. Die Ableitung der Membranverformung aus einer Beobachtung des Kraftverlaufs ist bei Auswertung des Motorschlupfs besonders vorteilhaft, weil dieser ein gutes Abbild des tatsächlichen Kraftbedarfs darstellt und so keinen zusätzlichen messtechnischen Aufwand erfordert.
- Die Dosiergenauigkeit wird verbessert, wenn die Dosierpumpe zusätzlich zu dem Positionssensor eine Regeleinrichtung besitzt, das Verdrängungsorgan eine teilweise elastische Membran ist und der tatsächlich ausgeführte Hubweg abhängig von der ermittelten Membranverformung beeinflusst wird, indem die Regeleinrichtung den Antriebsmotor nach Ausführen der gewünschten Hublänge ab dem Öffnen des Auslassventils anhält, in den Reversierbetrieb umschaltet und so im Anschluss einen Ansaughub durchführt und den Motor dann anhält bzw. den darauffolgenden Druckhub ausführt, so dass der durch die Membranverformung verursachte Fehlerbeitrag (bezogen auf den Hubweg bzw. das dosierte Volumen), der dadurch entsteht, dass der Betrag dieser Verformung nicht zur Dosierung beiträgt, eliminiert wird. Durch die verminderte Abhängigkeit der Dosiermenge vom Arbeitsdruck können Nachkalibrierungen, die sonst bei signifikanter Veränderung von Betriebsparametern wie z.B. dem Arbeitsdruck erforderlich sind, entfallen, und die Linearität des Verhältnisses zwischen eingestellter Hublänge und der tatsächlich dosierten Menge des Dosiermediums verbessert sich. Die Ableitung der Membranverformung aus einer Beobachtung des Kraftverlaufs ist bei Auswertung des Motorschlupfs besonders vorteilhaft, weil dieser ein gutes Abbild des tatsächlichen Kraftbedarfs darstellt und so keinen zusätzlichen messtechnischen Aufwand erfordert.
- Wenn das Verdrängungsorgan eine teilweise elastische Membran ist und die Dosierpumpe zusätzlich zu dem Positionssensor eine Regeleinrichtung besitzt, und die tatsächlich ausgeführte Hubfrequenz abhängig von der ermittelten Membranverformung beeinflusst wird, indem die Regeleinrichtung einen Korrekturwert für den durch die Membranverformung verursachten Fehlerbeitrag (bezogen auf den Hubweg bzw. das dosierte Volumen) ermittelt und die Solldrehzahl des Antriebsmotors mithilfe dieses Korrekturwerts so verändert, dass der durch die Membranverformung verursachte Fehlerbeitrag eliminiert wird, wird die Abhängigkeit der Dosiermenge vom Arbeitsdruck verringert.
- Nachfolgend ist als Ausführungsbeispiel der Erfindung eine motorbetriebene Membrandosierpumpe mit Exzentergetriebe mit ihren verschiedenen Anwendungsmöglichkeiten näher beschrieben. Es zeigt:
- Fig. 1:
- Längsschnitt durch eine Motordosierpumpe mit Positionssensor
- Fig. 2:
- Explosionsdarstellung des Positionssensors (Vergrößerung des Ausschnitts X aus Fig. 1
- Fig. 3:
- Komponenten des Positionsregelkreises
- Fig. 4:
- Komponenten des Geschwindigkeitsregelkreises
- Fig. 5:
- Draufsicht auf den Positionssensor in Achsrichtung
- Fig. 6:
- Seitenansicht des Positionssensors quer zur Achse
- Fig. 7:
- Darstellung des Schattenbereichs des Positionssensors
- Fig. 8:
- Darstellung der Helligkeitswerte der Pixels, wie sie dem tatsächlichen Schattenverlauf entsprechen
- Fig. 9:
- Darstellung des Abbildungsmaßstabs des Positionssensors aufgrund geometrischer Anordnung
- Fig. 10:
- Interpolation der Positionsauflösung
- Fig. 11:
- Darstellung der Berechnungsgrundlage für die Interpolation der Positionsauflösung
- Fig. 12:
- Darstellung der Dosierleistung in Abhängigkeit von der mechanischen Hublänge und vom Arbeitsdruck
- Fig. 1 zeigt den Aufbau einer Motordosierpumpe (teilweise geschnitten). Die Motordosierpumpe besteht, wie allgemein bekannt, im wesentlichen aus drei Gruppen von Komponenten, nämlich dem Antriebsmotor 2 mit Getriebeeinheit, dem Exzenterantrieb im Exzentergehäuse 1 und dem Elektronikgehäuse 28 mit der darin enthaltenen elektronischen Steuerung und den dort eingesetzten elektronischen Baugruppen und Bauteilen. Das Elektronikgehäuse 28 weist auf der Unterseite eine Bodenplatte 4 mit Befestigungsbohrungen auf, das Exzentergehäuse 1, das auf das Elektronikgehäuse 28 aufgesetzt und mit diesem fest verbunden ist, trägt den Antriebsmotor 2 mit Getriebeeinheit, der z.B. über Schrauben mit dem Exzentergehäuse verbunden ist.
- In dem sogenannten Gehäuse, welches von dem Exzentergehäuse 1 und dem Elektronikgehäuse 28 gebildet wird, sind in dessen oberem Teil, dem Exzentergehäuse 1, die Komponenten des Exzenterantriebs befestigt. Die Komponenten des Exzenterantriebs sind in einem Exzenterträger 22 gelagert, der die Lageabstimmung der Einzelteile zueinander sicherstellt und im Exzentergehäuse 1 befestigt ist. Ein Dreiphasen-Asynchronmotor 2 ist zusammen mit einem Untersetzungsgetriebe 11, welches als Winkelgetriebe ausgeführt ist, als Baueinheit von außen an das Exzentergehäuse 1 angeflanscht und mit Schrauben verbunden. Die Abtriebswelle des Getriebemotors bildet einen rechten Winkel zur Wellenachse des Motors und bildet entweder direkt die Antriebswelle des Exzenterantriebs oder ist wie im beschriebenen Ausführungsbeispiel mit dieser über eine Kupplung achsgleich verbunden. Die Antriebswelle des Exzenterantriebs, die Exzenterwelle 17, ist im Exzenterträger 22 drehbar gelagert und trägt als fest mit ihr verbundenen Teil einen Exzenter. Die Exzenterwelle durchdringt mit dem Exzenter einen entsprechend ausgeschnittenen Schubbügel 20. Die Exzenterwelle 17 wird durch die Motor-/Getriebeeinheit über die Wellenkupplung bei angesteuertem Motor 2 in Drehung versetzt und treibt weiter den Schubbügel 20 an einer Innenfläche seines Ausschnitts, nämlich der Anlauffläche, mit der Außenfläche des Exzenters an. Der Schubbügel 20 treibt eine fest mit ihm verbundene, im Beispiel eingespritzte, Schubstange 19 an. Die Einheit aus Schubbügel 20 und Schubstange 19 ist längs verschiebbar in zwei Gleitbuchsen gelagert. Die Achse der Exzenterwelle 17 sowie die Längsachse 18 des Schubbügels 20 sowie der Schubstange 19 liegen jeweils in der horizontalen Ebene und bilden einen rechten Winkel zueinander. Eine der beiden Gleitbuchsen 26 für die Schubstange 19 sitzt in einer Lagerscheibe 24, die druckkopfseitig am Exzenterträger 22 befestigt ist; eine weitere Gleitbuchse 27, die den von der Dosierkopfseite abgewendeten Zapfen des Schubbügels 20 aufnimmt, sitzt im Hubverstellbolzen 8. Achsgleich zur Längsachse 18 der Schubstange 19 ist ein per Hand zu betätigendes Verstellorgan 7 für die Verstellung des Hubverstellbolzens 8 in ein Gewinde des Exzenterträgers 22 eingeschraubt, das die Axialbewegung des Schubbügels 20 beim Ansaugen und damit den Hub der Dosierpumpe begrenzt.
- Das Gehäuse enthält weiter in seinem unteren Teil in einem abgeschlossenen Raum, dem Elektronikgehäuse 28, die elektronische Steuerung. Das Gehäuse ist spritzwasserdicht ausgeführt und schützt den Exzenterantrieb sowie die elektronische Steuerung vor Feuchtigkeit bzw. Korrosion, da Dosierpumpen häufig im Zusammenhang mit chemisch aggressiven Medien eingesetzt werden. Die elektronische Steuerung besteht aus einer horizontal liegenden Ansteuerelektronik 34 mit den Leistungsschaltstufen für die Motoransteuerung 29, die als integrierter Frequenzumrichter ausgeführt sind, sowie einer in einem Gehäusedeckel 5 angeordneten Elektronik 6, die die für die Bedienung der Dosierpumpe notwendigen Eingabe- und Anzeigeelemente enthält. Die Bedienelemente sind durch eine Abdeckhaube 9 geschützt. Unterhalb der Abdeckhaube 9 sind Anschlüsse für die Steuerleitungen 10 bzw. für die Stromversorgung vorgesehen.
- Auf der den Steuerleitungen 10 bzw. dem Stromversorgungsanschluss gegenüberliegenden Seite ist achsgleich zur Längsachse 18 der Schubstange ein Dosierkopf 12 angeordnet, in dem als Verdrängungsorgan eine z.B. aus Kunststoff gefertigte Membran 13 arbeitet, die an ihrem Umfang fest eingespannt ist. Der Dosierkopf 12 trägt weiterhin ein Einlassventil 14 und ein Auslassventil 15, um das zwischen Membran 13 und Dosierkopf 12 in dem Dosierraum 16 über das Einlassventil 14 angesaugte Dosiermedium über das Auslassventil 15 in die Dosierleitung zu drücken. Die Motordosierpumpe arbeitet nach dem volumetrischen Prinzip, d.h. ein vorgegebenes Volumen soll bei jedem Hub einerseits angesaugt und andererseits über das Auslassventil 15 ausgestoßen werden. Die Membran 13 wird mittels des Exzenterantriebs, der die Schubstange 19 in der Längsachse hin- und herbewegt, in eine oszillierende Bewegung versetzt. Zur Seite des Hubverstellbolzens 8 hin wirkt die Einheit aus Schubbügel 20 und Schubstange 19 mit dem Verstellorgan 7 als per Hand verstellbare Hubverstellvorrichtung zusammen. Am gegenüberliegenden Ende ist der zum Dosierkopf 12 zeigende Teil der Schubstange 19 fest mit dem Kern 30 der Membran 13 verbunden und versetzt diese in eine oszillierende Bewegung.
- Zwischen dem Schubbügel 20 und einem Bund 25 der Lagerscheibe 24 ist eine Druckfeder 23, z.B. eine Spiralfeder, angeordnet, die den Schubbügel 20 zu jedem Zeitpunkt formschlüssig am Exzenter anlegt. In der vorlaufenden Phase der Exzenterbewegung, also der Bewegung der Schubstange zum Dosierkopf hin, wird der Schubbügel mit der Schubstange zur Druckfeder hin bewegt, gleichzeitig wird die Membran 13 in den Dosierraum 16 gedrückt, was zur Folge hat, dass im Dosierraum ein Überdruck entsteht, das Auslassventil 15, z.B. ein federbelastetes Kugelventil, sich öffnet und das Dosiermedium in die Dosierleitung gedrückt wird. In der zurücklaufenden Phase der Exzenterbewegung, also der Bewegung der Schubstange weg vom Dosierkopf, wird der Schubbügel 20 durch die zusammengedrückte Druckfeder 23, die z.B. als Spiralfeder ausgebildet sein kann, der Exzenterbewegung folgend in die entgegengesetzte Richtung zum Hubverstellbolzen 8 bewegt, was zur Folge hat, dass die mit der Membran 13 verbundene Schubstange 19 die Membran in ihrer Bewegung mitnimmt, wodurch im Dosierraum 16 ein Unterdruck entsteht, der das Einlassventil 14 öffnet, so dass ein weiteres Mal Dosiermedium in den Dosierraum eingesaugt werden kann. Durch die abwechselnde, oszillierende Bewegung der Membran 13 mittels des Exzenterantriebs entsteht der Förderstrom des Dosiermediums in der Dosierleitung. Durch den Exzenterantrieb entsteht ein sinusförmiger Bewegungsablauf der Einheit aus Schubbügel 20, Schubstange 19 und Membran 13 im Verlauf eines Dosierhubs. Wird mittels des Hubverstellbolzens 8 eine reduzierte Hublänge eingestellt, wird der Bewegungsablauf in der Ansaugphase vor Erreichen des Totpunkts durch den verstellbaren Anschlag des Hubverstellbolzens 8 vorzeitig gebremst, wodurch der Sinusverlauf der Bewegung abgeschnitten wird und ein Phasenanschnitt der Hubbewegung entsteht.
- Die Position der Einheit aus Schubbügel 20, Schubstange 19 und Membran 13 wird durch den Positionssensor 36 abgetastet, dessen Messsignal in einer definierten Beziehung zu dieser Position steht; diese Beziehung kann als mögliche Ausführung z.B. streng proportional sein. Das Messsignal des Positionssensors 36 bezieht sich dabei stets auf die Position des Teils der beweglichen Einheit, an dem dieser angreift. Dieser Angriffspunkt wird durch das Bezugselement gebildet, welches in diesem Zusammenhang in abstraktem Sinn zu verstehen ist. Je nach Anforderungen des Positionssensors kann es als konkretes, zusätzlich zu montierendes Bauteil ausgeführt sein, aber auch lediglich aus einer charakteristischen Ausbildung z.B. einer Kante oder Fläche an einer der ohnehin erforderlichen Komponenten, z.B. am Schubbügel 20, bestehen.
- Beim Ausführungsbeispiel ist im Exzenterträger 22 ein Sensorträger 31 befestigt (siehe auch die schematische Darstellung in Fig. 6), der einerseits in Längserstreckung lichtempfindliche CCD-Zellen 32 (CCD = charged coupled device; ladungsgekoppelter optischer Empfängerbaustein) und gegenüberliegend eine Lichtquelle 33, z.B. eine Leuchtdiode (LED), trägt.
- Der mit dem Exzenterträger verbundene Sensorträger 31 und die darauf befestigten Komponenten bilden eine Lichtschranke, deren Strahlengang von dem Schubbügel teilweise unterbrochen wird. Das Bezugselement wird durch eine Schattenkante 35 des Schubbügels 20 im Bereich der Lichtschrankenanordnung gebildet. Bei der oszillierenden Bewegung der Schubstange 19 überstreicht also die Schattenkante 35 berührungsfrei die lichtempfindlichen Zellen 32. Wie nun insbes. in Fig. 5 schematisch dargestellt ist, die eine Draufsicht in Achsrichtung zeigt, muss die Lichtquelle 33 so angeordnet sein, dass der Lichtstrahl auf seinem Weg zu den lichtempfindlichen Zellen 32 nicht durch die Schubstange 19 abgedeckt wird; d.h. z.B., dass die Lichtquelle 33 und die Zeile der lichtempfindlichen CCD-Zellen 32 oberhalb oder unterhalb der Schubstange 19 angeordnet ist. Wie nun insbes. in Fig. 7 schematisch dargestellt ist, wird durch die Lichtquelle 33 mittels der Schattenkante 35 auf die lichtempfindlichen Zellen 32 ein Schatten geworfen, der die Zellen im Grundsatz in beschienene (h) und nicht beschienene (d) Zellen unterteilt. Da die Reihe der parallel zur Längsachse 18 angeordneten lichtempfindlichen Zellen, z.B. 128 Pixels, die eine Strecke von insgesamt ca. 8mm abdecken, im Grenzbereich nur teilweise belichtet bzw. beschattet wird, entsteht die in Fig. 8 dargestellte Übergangssituation des Schattenverlaufs SV. Die Höhe der in Fig. 8 dargestellten rechteckigen Flächen stellt dabei die Beleuchtungsstärke der jeweiligen Pixels dar. Durch ein spezielles Verfahren, das später eingehend beschrieben und anhand der Fig. 10 erläutert wird, wird diese Grenzsituation genutzt, um die jeweilige Position der Schattenkante und damit die Stellung der Schubstange bzw. der Membran genau zu bestimmen. Diese Messeinrichtung, bestehend aus schubbügelseitiger Schattenkante und sensorträgerseitigen lichtempfindlichen CCD-Zellen mit gegenüberliegender Lichtquelle, dient dazu, die tatsächliche Lage bzw. die Geschwindigkeit der oszillierenden Schubstange zu messen und diese Information für die Realisierung der beschriebenen Funktionen zu nutzen.
- Die Schubstange, die die Membran in eine oszillierende Bewegung versetzt, legt bei jedem Hub eine Strecke zurück, die der mechanischen Hublänge entspricht. Um Montagetoleranzen zu berücksichtigen, muss die Längserstreckung der lichtempfindlichen CCD-Zellen etwas größer sein. Dies gilt prinzipiell auch für jeden anderen denkbaren zum Einsatz kommenden Positionssensor.
- Wenn mithilfe des Positionssensorsignals eine Regelung der Membran- oder allgemein der Verdrängerbewegung realisiert werden soll, sind, wie insbesondere in Fig. 3 bzw. Fig. 4 schematisch erläutert, die nachfolgend genannten mechanischen und elektronischen Komponenten erforderlich. Die in den beiden Diagrammen enthaltenen Kurzbezeichnungen bedeuten dabei:
- xS:
- Sollwert der Position des Verdrängungsorgans
- xI:
- Istwert der Position des Verdrängungsorgans
- xSI:
- Regelabweichung der Position des Verdrängungsorgans
- vS:
- Sollwert der Geschwindigkeit des Verdrängungsorgans
- vI:
- Istwert der Geschwindigkeit des Verdrängungsorgans
- vSI:
- Regelabweichung der Geschwindigkeit des Verdrängungsorgans
- SG:
- Stellgröße
- KSG:
- Korrigierte Stellgröße
- MA(U,f):
- Motoransteuerung (Spannung bzw. Frequenz)
- Der bewegliche Teil des Antriebs, dessen Bewegung geregelt werden soll, besteht aus dem Schubbügel 20 mit der Schubstange 19, mit der der Membrankem 30 fest verbunden ist. Die Rückholfeder 23 holt den Schubbügel nach erfolgtem Arbeitshub zurück und bewirkt so das Ansaugen. Der äußere Ring der Membran 13 ist im Dosierkopf 12 fest montiert, der in der Membran eingespritzte metallene Membrankern 30 bewegt die zentrale Fläche der Membran als Verdrängerorgan im Dosierkopf. Das Einlassventil 14 schließt auf der Ansaugseite, das Auslassventil 15 auf der Druckseite den Dosierkopf ab und bietet jeweils eine Anschlussmöglichkeit für die äußere Verrohrung. Mit der Schubstange 19 oder mit einem mit dieser in Verbindung stehenden Bauteil, hier mit dem Schubbügel 20, ist z.B. am dem Dosierkopf abgewandten Ende ein Bezugselement verbunden, dessen Position von einem im vorliegenden Fall berührungsfrei arbeitenden Positionssensor 36 abgetastet wird. Im Ausführungsbeispiel ist das Bezugselement eine Schattenkante 35 des Schubbügels 20 und der Positionssensor eine lichtschrankenähnliche Anordnung, bestehend aus der vorher beschriebenen Lichtquelle 33 im Zusammenwirken mit der Reihe lichtempfindlicher Zellen 32, welche die Position der Schattenkante 35 optisch und damit berührungsfrei durch deren Schattenbildung erfasst. Da die Schubstange 19 die eigentliche Verbindung und den Kraftschluss zur Membran 13 sicherstellt und Schubbügel und Schubstange im vorliegenden Beispiel fest verbunden sind, bezieht sich die folgende Beschreibung immer auf die Bewegung der Schubstange 19, obwohl genau genommen die der Schattenkante 35 des Schubbügels 20 gemessen wird.
- Der Positionssensor 36 gibt ein Istsignal xl ab, welches der Position des Bezugselements 35 proportional ist. Im Falle des Geschwindigkeitsreglers wird dieses im Ausführungsbeispiel durch einen Differenzierer 37 nach der Zeit abgeleitet (dxI/dt) und so zusätzlich ein geschwindigkeitsproportionales Istsignal vI gebildet. Für die Regelung sind selbstverständlich auch andere Methoden geeignet, die ein zur Membrangeschwindigkeit proportionales Signal bereitstellen. Je nach Typ der Regelung und Erfordernissen der Dosierung wird ein zeitliches Profil für den Sollwert 38 der Position xS bzw. der Geschwindigkeit vS vorgegeben. Durch einen Soll-Ist-Vergleich 39 wird die Regelabweichung als Positionsabweichung xSI = (xS - xI) bzw. Geschwindigkeitsabweichung vSI = (vS - vI) ermittelt, und das Ergebnis wird auf einen PID-Regler 40 gegeben (PID-Regler = Regler mit Proportional-, Integral- und Differentialanteil). Dessen Ausgang, die Stellgröße SG, entspricht einem Anforderungswert für die Antriebsleistung. Zur Verbesserung der Reglerstabilität wird die Stellgröße SG durch eine Lagekorrektur 41 weiter verarbeitet. Die Lagekorrektur 41 berücksichtigt die Tatsache, dass die Drehzahl des Motors abhängig von der Drehwinkelstellung des Exzenters (abzuleiten aus der Schubstangenposition) entsprechend der sinusförmigen Charakteristik des Exzentergetriebes in eine Geschwindigkeit an der Schubstange umgesetzt wird. Die Lagekorrektur 41 rechnet hierzu das Ausgangssignal des PID-Reglers 40 über die inverse Charakteristik des Exzentergetriebes in eine korrigierte Stellgröße KSG um, die bezogen auf den Eingang des Untersetzungsgetriebes 11 die notwendige Motoransteuerung repräsentiert, die erforderlich ist, um am Ausgang des Exzentergetriebes eine Bewegung der Schubstange 19 entsprechend der gewünschten Stellgröße SG zu erhalten. Ein Verstärker 42, der als Frequenzumrichter ausgeführt ist, beinhaltet die Leistungsschaltstufen und steuert den Motor entsprechend der angeforderten Drehzahl mit der zugehörigen Spannung und Frequenz an. Der Betrag der positionsabhängigen Lagekorrektur, die Umsetzung der korrigierten Stellgröße KSG in eine konkrete Drehzahlvorgabe für den Frequenzumrichter sowie ggf. die Ableitungskonstante für die Bildung des Geschwindigkeitssignals vl werden durch die drei Proportionalitätsfaktoren k1, k2, k3 festgelegt. Der Faktor für die positionsabhängige Lagekorrektur k1 ist entsprechend der Charakteristik des Exzentergetriebes zu wählen, die beiden Faktoren k2 für den Leistungsverstärker bzw. k3 für die Ableitung des Geschwindigkeitssignals können anhand praktischer Gesichtspunkte gewählt werden, wie z.B. das Arbeiten mit möglichst gut handhabbaren Wertebereichen der zugehörigen Größen.
- In der Fig. 3 ist der Regelkreis für einen Positionsregler, in Fig. 4 ist der Regelkreis bei Einsatz als Geschwindigkeitsregler schematisch dargestellt. Der beschriebene Regelkreis setzt das vorgegebene zeitliche Profil für den Sollwert der Position xS bzw. der Geschwindigkeit vS um, natürlich im Rahmen seiner möglichen Regelgenauigkeit.
- Die Festlegung des konkreten Profils für die Position, die Geschwindigkeit bzw. die Beschleunigung und die Umschaltung zwischen diesen Betriebsarten geschieht dabei anhand der Anforderungen, die sich aus den beispielsweise nachfolgend beschriebenen Funktionen ergeben, unter Berücksichtigung der Funktionsgrenzen des Reglers wie Regelgeschwindigkeit, erreichbare Genauigkeit usw.
- Mit einer derartigen Regelung ist es bei einer Motordosierpumpe möglich, eine gewünschte Geschwindigkeit der Membran 13, allgemein des Verdrängungsorgans, vorzugeben und so die effektive Strömungsgeschwindigkeit des Dosiermediums zu kontrollieren.
- Ebenso kann die Membranposition unmittelbar geregelt werden. Diese Funktion ermöglicht, in ausgewählten Phasen des Dosiervorgangs bestimmte Positionen gezielt anzufahren und wenn erforderlich auch im Stillstand einzuhalten.
- Durch die Regelung des Bewegungsablaufs mittels eines Positionsgebers kann im Unterschied zu einem ungeregelten Betrieb auf Änderungen von Betriebsgrößen reagiert werden, die über die Zeit auftreten oder durch Umweltbedingungen bzw. Exemplarstreuungen, also statistische Abweichungen innerhalb der Produktionsserie, bedingt sind, und deren schädlicher Einfluss minimiert werden. Als Beispiele seien die Membransteifigkeit oder die Viskosität des Dosiermediums genannt. Beide erfordern einen Anteil an Antriebskraft, der zusätzlich zu der Kraft aufgebracht werden muss, die durch das Einwirken des Arbeitsdrucks auf die Membranfläche entsteht. Diese Störeinflüsse können durch Erfassung ihrer Auswirkung und Nachregeln der Motoransteuerung kompensiert werden. Bei einer ungeregelten Dosierpumpe mit vorgegebener Motordrehzahl, auch wenn diese selbst mittels Regelung stabilgehalten wird, bleiben solche Störeinflüsse unberücksichtigt. Bei einer solchen ungeregelten Dosierpumpe ist darüber hinaus aufgrund der sinusförmigen Charakteristik des Exzentergetriebes eine exakte Vorhersage der momentanen Geschwindigkeit des Verdrängungsorgans ohne Kenntnis der Schubstangenposition, also des Drehwinkels des Exzenters, nicht möglich.
- Darüber hinaus ist es durch die Regelung des Bewegungsablaufs mittels eines Positionsgebers möglich, im Gegensatz zu dem spontan ablaufenden Dosiervorgang bei ungeregeltem Betrieb auf innere und äußere Einflussgrößen zu reagieren, die im Folgenden beschrieben sind, und Betriebsbedingungen sicherzustellen, mit deren Hilfe ausgewählte hydraulische Eigenschaften der Dosierung gezielt hervorgerufen bzw. vermieden werden können. Als Beispiel hierfür sei auf die weiter unten beschriebene Funktion des Schutzes vor Kavitation beim Ansaugen verwiesen.
- Nachfolgend seien beispielsweise einzelne Einsatzmöglichkeiten einer Motordosierpumpe der vorher beschriebenen Art erläutert, die einen Positionssensor aufweist und mittels einer Auswertung des Positionssignals Rückschlüsse auf den Betriebszustand des Dosierkreises zieht oder durch eine Regelung und Veränderung der Motoransteuerung den Bewegungsablauf der Membran beeinflusst.
- Dosierpumpen nach dem Stand der Technik bieten oft eine Betriebsart, in der die ausgeführten Dosierhübe über das eingestellte Volumen der Verdrängerkammer (Hublänge) direkt in ein dosiertes Gesamtvolumen umgerechnet werden und dieses z.B. als Volumenstrom in der Einheit l/h angezeigt wird. Für solche Funktionen ist die Kenntnis über die durch den Bediener eingestellte Hublänge erforderlich, da hiervon das pro Hub dosierte Volumen abhängt. Die Stellung der Hubverstelleinrichtung muss zu diesem Zweck bei Dosierpumpen bisheriger Bauart durch einen separaten Sensor in ein elektrisches Signal umgewandelt und in die Steuerung eingelesen werden. Ein Beispiel für eine praktische Realisierung wäre ein Linearpotentiometer am Hubverstellorgan 7, welches über einen Stößel dessen Einstellung abtastet.
- Eine Dosierpumpe, die mithilfe des integrierten Positionssensors 36 den tatsächlich abgefahrenen Membranweg während des Hubs erfassen kann, benötigt keinen zusätzlichen Sensor. Durch Differenzbildung der beiden Positionswerte in den Endstellungen, die jeweils nach Erreichen des mechanischen Anschlags gemessen werden können, sobald die Bewegung zum Erliegen gekommen ist, kann die Hublänge direkt berechnet werden und steht für die weitere Verarbeitung zur Verfügung.
- Bei Dosierpumpen nach dem Stand der Technik ohne Positionssensor werden oft Sensoren eingesetzt, die zur Überwachung der Dosierbewegung pro Hub einen Rückmeldeimpuls an die elektronische Steuerung abgeben. Eine bekannte Ausführung ist z.B. ein kleiner Permanentmagnet, der an der Ausgangswelle des Getriebes, also an der Exzenterwelle 17 außerhalb der Achse befestigt ist und mit dieser umläuft, in Verbindung mit einem feststehenden Hallsensor, der beim Passieren des Magneten in einer bestimmten Drehwinkelstellung der Exzenterwelle ein Signal erzeugt. Anhand dieses Signals misst die elektronische Steuerung die Hubperiodendauer, die mit der Umlaufdauer der Exzenterwelle identisch ist, und leitet daraus einen störungsfreien Ablauf des Dosiervorgangs ab. Bei einer Blockade im Verlauf des Dosierhubs durch eine Überdrucksituation, z.B. bei einem versehentlich geschlossenen Absperrorgan in der Dosierleitung, bleibt das Signal des Hallsensors aus und führt nach Ablauf einer Überwachungszeitspanne zu einer Störungsmeldung und weiteren Reaktionen, z.B. Stillsetzen der Dosierpumpe. Bei einem solchen herkömmlichen System liegt die gewünschte Information erst nach Ablauf der Überwachungszeit vor.
- Bei Verwendung eines Positionssensors 36 kann zu jedem Zeitpunkt des Dosierhubs die Geschwindigkeit der Schubstange 19 in Relation zur Ansteuerung des Motors 2 gesetzt werden, und eine Blockade kann praktisch verzögerungsfrei erkannt werden.
- Wird als Antriebsmotor 2 z.B. ein Asynchronmotor eingesetzt, ist die effektive mechanische Drehzahl an der Motorabgangswelle unter Belastung immer geringfügig kleiner, als durch die Frequenz der elektrischen Ansteuerung vorgegeben ist. Die Differenz der beiden Drehzahlen, der sog. Schlupf, ist abhängig von Kenngrößen des Motors und innerhalb eines sinnvollen Lastbereichs annähernd proportional zum Lastdrehmoment. Der Schlupf kann nach verschiedenen, nachfolgend beschriebenen Methoden gemessen werden. Aus ihm kann ein Korrekturwert errechnet werden, der bei Verwendung eines Frequenzumrichters in die vorgegebene Motordrehzahl in Form einer Frequenzerhöhung eingerechnet und so kompensiert werden kann.
- Der Schlupf kann beispielsweise durch Vergleich der gemessenen Hubperiodendauer mit der durch die elektrische Ansteuerung vorgegebenen ermittelt werden. Diese Methode wird auch bei Dosierpumpen nach dem Stand der Technik durch Messung des Zeitabstands zweier Hallsensorimpulse angewandt. Im Fall einer Dosierpumpe mit Positionssensor wird zur Periodendauermessung ein charakteristischer Punkt entlang des Hubwegs, z.B. auf halbem Weg, definiert und bei aufeinanderfolgenden Dosiervorgängen jeweils der Zeitpunkt festgehalten, zu dem dieser Punkt durchlaufen wird; die Zeitdifferenz zweier solcher Zeitpunkte ist die gesuchte Periodendauer.
- Bei Motordosierpumpen mit Positionssensor 36 arbeitet eine unmittelbarere Methode zur Schlupferfassung mit der Beobachtung der Momentangeschwindigkeit der Schubstange 19. Aus der durch die elektrische Ansteuerung vorgegebenen Motordrehzahl kann über die bekannte Getriebe- und Exzentercharakteristik jederzeit eine ideale Schubstangengeschwindigkeit errechnet werden. Durch Vergleich der idealen mit der gemessenen Geschwindigkeit kann der Schlupf zu jedem Zeitpunkt während des Exzenterumlaufs ermittelt und durch Nachregeln der Frequenz der Motoransteuerung korrigiert werden.
- Wird z.B. ein Asynchronmotor eingesetzt, kann mithilfe des nach einer der vorher beschriebenen Methoden ermittelten Schlupfs die auf das Verdrängungsorgan wirkende Kraft ermittelt und so ein Rückschluss auf den Arbeitsdruck des Dosiermediums vorgenommen werden. Hierbei ist jedoch zu beachten, dass der Exzenter die auf die Schubstange 19 wirkende Kraft entsprechend seiner sinusförmigen Charakteristik je nach momentaner Winkelstellung über das Getriebe 11 an den Motor 2 überträgt. In den beiden Totpunkten, also den Wendepunkten der Hubbewegung, ist der Motor von der Schubstangenkraft entkoppelt, d.h. lastfrei, in den beiden Punkten genau dazwischen überträgt der Exzenter das Lastmoment maximal zum Motor. Entsprechend wird bei angenommener konstanter Schubstangenkraft das aufzubringende Drehmoment an der Motorabgangswelle und damit auch der Schlupf angenähert nach einer Sinusfunktion schwanken. Die Schwankungsbreite ist dabei ein Abbild der Schubstangenkraft.
- Wird wie oben beschrieben die Abweichung der Hubperiodendauer vom Idealwert ermittelt, so repräsentiert diese den über den Sinusverlauf des Exzenters gemittelten Schlupf, der wiederum ein Maß für die mittlere Hubstangenkraft, d.h. den Arbeitsdruck, darstellt. Wird der Schlupf fortlaufend aus dem Vergleich der durch die elektrische Ansteuerung vorgegebenen Motordrehzahl mit der Schubstangengeschwindigkeit ermittelt, kann mithilfe der bekannten Exzentercharakteristik und der Kenntnis des momentanen Drehwinkels des Exzenters, der aus der Schubstangenposition folgt, der zeitliche Kraftverlauf an der Schubstange 19 errechnet werden. Aus dem Kraftverlauf an der Schubstange kann wiederum der Arbeitsdruck abgeleitet werden.
- Wird der Auslenkmechanismus durch eine andere Lösung als einen Exzenter realisiert, ist dessen Charakteristik sinngemäß auf das Gesagte anzuwenden.
- Wird der Arbeitsdruck nach einer der geschilderten Methoden ermittelt, kann er auf Einhaltung bestimmter Grenzen überwacht werden, und bei Ansprechen der Überwachung können Störmeldungen und weitergehende Reaktionen wie z.B. Stillsetzen der Dosierpumpe ausgelöst werden. Eine Überwachung auf Grenzwertüberschreitung kann zum Schutz der Pumpe oder anderer Anlagenkomponenten erfolgen; fallweise kann ein werksseitig vorgegebener Grenzwert von z.B. 130% des Maximaldrucks der Dosierpumpe auf Überschreitung überwacht werden, die Überwachungsgrenze kann jedoch auch innerhalb des spezifizierten Arbeitsbereichs der Dosierpumpe liegen, wenn z.B. empfindlichere Anlagenteile geschützt werden sollen, und ist in diesem Fall durch den Bediener vorzugeben. Möglich ist auch eine Überwachung auf Beibehaltung vorgegebener Betriebsbedingungen; in diesem Fall wird eine Störmeldung z.B. dann ausgelöst, wenn ein einmal vorherrschender und (z.B. durch eine Bedienerangabe) als Referenz gekennzeichneter Arbeitsdruck sich um einen Prozentsatz nach oben oder unten verändert. Wird der Arbeitsdruck auf Einhaltung eines Mindestdrucks von z.B. 1 bar überwacht, ist es damit möglich, ein Leck zu erkennen, welches durch einen Schaden in der Verrohrung hervorgerufen wurde.
- Die genaue Dosierleistung wird bei Motordosierpumpen je nach Ausführung unterschiedlich vom Arbeitsdruck beeinflusst. Zum einen arbeitet der Antriebsmotor 2, wenn er z.B. als Asynchronmotor ausgeführt ist, bei steigendem Arbeitsdruck mit zunehmendem Schlupf, der sich in einem Drehzahlabfall und einer damit verbundenen reduzierten Hubfrequenz auswirkt. Zum anderen erfährt eine als Verdrängungsorgan eingesetzte Membran 13 während des Dosierhubs eine elastische Verformung unter dem Einfluss des Arbeitsdrucks. Zu Beginn des Dosierhubs wird im Dosierraum 16 bei noch geschlossenem Auslassventil 15 der Innendruck kontinuierlich erhöht, indem der Membrankem 30 durch die Schubstange 19 unter Aufbau von Druck in den Dosierraum 16 hinein bewegt wird und der elastische Walkbereich der Membran 13 in gleichem Maß dem Druck nachgebend gegenläufig zur Bewegung des Membrankems 30 zurückweicht. Die Membran 13 verformt sich in sich selbst, in der Summe findet aber so gut wie keine Volumenänderung statt, was auf die Tatsache zurückzuführen ist, dass das Dosiermedium praktisch nicht komprimierbar ist und zu diesem Zeitpunkt beide Ventile geschlossen sind. Am Ende dieser Verformungsphase entspricht der Kammerdruck dem äußeren Arbeitsdruck. Der bis hierhin zurückgelegte Weg der Schubstange 19 entspricht dem Betrag der Membranverformung, also dem Totbereich zu Beginn der Dosierung, und trägt praktisch nicht zur Dosierung bei. Die Verformung bzw. der Totbereich bewegt sich typisch in einem Bereich von ca. 0,1-0,5mm je nach Membrangröße, Arbeitsdruck usw. Am Punkt des Druckgleichgewichts öffnet das druckseitige Auslassventil 15. Nun ist der auf die Membran 13 wirkende Druck praktisch identisch mit dem äußeren Arbeitsdruck und bleibt, wie auch die Membranverformung, für den restlichen Teil des Dosierhubs annähernd konstant. Der Punkt des Druckgleichgewichts, an dem das druckseitige Auslassventil öffnet, markiert den eigentlichen Beginn der Dosierung, so dass der Betrag der Membranverformung dem Dosierhub verloren geht, d.h. die effektive Hublänge errechnet sich aus der mechanisch vorgegebenen abzüglich der Membranverformung. Da die Membranverformung selbst mehr oder weniger proportional mit dem Arbeitsdruck zunimmt, ergibt sich als typische Abhängigkeit eine fallende Dosierleistungskurve bei steigendem Arbeitsdruck. Die sich ergebende negative Abweichung fällt umso stärker ins Gewicht, je kleiner die eingestellte Hublänge ist.
- Bei einer Motordosierpumpe nach dem Stand der Technik ist die Dosierleistung nicht nur druckabhängig, sondern zusätzlich im Teilhubbetrieb nicht streng proportional zur eingestellten mechanischen Hublänge. Vielmehr beginnt die effektive Dosierung beim Hub erst nach einem anfänglichen Totbereich ab dem Punkt der vollständigen Membranverformung mit dem Öffnen des Auslassventils 15. Trägt man eine Kennlinie auf, die die Dosierleistung in Abhängigkeit von der eingestellten mechanischen Hublänge zeigt, ergibt sich eine linear ansteigende Kurve, die erst ab einer Mindesthublänge entsprechend dem Totbereich von xT1, xT2, xT3... xTn eine reale Dosierleistung aufweist (s. Fig. 12). Da diese Mindesthublänge der Membranverformung entspricht, ist sie zudem vom Arbeitsdruck P1, P2, P3... Pn abhängig.
- Diese Kennlinienverschiebung xT1, xT2, xT3... xTn bedingt bei bisheriger Technik eine Nachkalibrierung unter realen Arbeitsbedingungen, sobald die bisher eingestellte Hublänge wesentlich verändert wird, da die neue Dosierleistung nicht mit genügender Genauigkeit über eine proportionale Umrechnung aus der bisherigen und der neu eingestellten Hublänge ermittelt werden kann.
- Wird der Arbeitsdruck nach einer der vorher geschilderten Methoden ermittelt, ist es möglich, anhand der beschriebenen Abhängigkeiten, die in Vorversuchen für einen Gerätetyp quantitativ ermittelt werden können, den fehlererzeugenden Einfluss des Arbeitsdrucks auf die Dosierleistung vorherzubestimmen und zu kompensieren. Hierzu wird anhand des ermittelten Arbeitsdrucks und der eingestellten Hublänge, die, wie weiter oben beschrieben, ebenfalls mithilfe des Positionssensors gemessen werden kann, aus der bekannten Fehlerabhängigkeit ein Korrekturwert berechnet, der der eingestellten Hubfrequenz zugeschlagen wird. Zu beachten ist hierbei, dass unter praktischen und wirtschaftlichen Aspekten nur der systematische Anteil des Einflusses eliminiert werden kann. Der druckabhängige Dosierleistungsfehler wird hauptsächlich von Materialeigenschaften und Abmessungen der beteiligten Komponenten bestimmt, die sich in gewissem Maß durch Alterung verändern können bzw. Exemplarstreuungen in der Produktionsserie unterliegen. Diese Variationen werden durch die hier beschriebene Methode, den durch die Membranverformung bedingten Fehler mithilfe vordefinierter, aus Bauteileparametern abgeleiteter bzw. in Messreihen ermittelter Werte zu korrigieren, nicht berücksichtigt; vielmehr müssten in regelmäßigen Intervallen bzw. bei jedem Hub am vorliegenden Geräteexemplar die konkreten Verhältnisse messtechnisch neu erfasst werden.
- Wird der fehlererzeugende Einfluss der Membranverformung wie vorher beschrieben kompensiert, indem der Arbeitsdruck nach einer der vorher geschilderten Methoden ermittelt und die eingestellte Hubfrequenz um einen Korrekturwert angepasst wird, so wird auch der Proportionalitätsfehler im Teilhubbetrieb eliminiert, so dass die Dosierpumpe praktisch über den vollen nutzbaren Einstellbereich der Hublänge von z.B. 20%-100% betrieben werden kann, ohne die bisher notwendigen Nachkalibrierungen durchführen zu müssen, die bei einer herkömmlichen Dosierpumpe bei einer Verstellung der Hublänge um mehr als z.B. 10% notwendig sind, um die spezifizierte Dosiergenauigkeit sicherzustellen.
- Die Funktion, die Geschwindigkeit des Verdrängungsorgans, hier der Membran 13, zu regeln, kann insbesondere bei hochviskosen Medien (z.B. Lecithin) zur Begrenzung von Strömungsverlusten in Ventilen und anderen Engstellen genutzt werden. Hohe Strömungsgeschwindigkeiten haben bei solchen Medien durch zusätzliche Druckverluste infolge von Strömungswiderständen einen negativen Einfluss auf die Dosiergenauigkeit. Zusätzlich ist es hier von Vorteil, wenn durch die begrenzte Geschwindigkeit mehr Zeit für das definierte Öffnen und Schließen der Ventile zur Verfügung gestellt wird. Beide Effekte verbessern insgesamt die Dosiergenauigkeit bei hochviskosen Medien. Um dies zu erreichen, wird während des gesamten Dosiervorgangs die Membrangeschwindigkeit auf einen wählbaren Maximalwert begrenzt gehalten. Diese Maximalgeschwindigkeit hängt u.a. von der Viskosität des konkret zu dosierenden Mediums ab und ist z.B. in Form mehrerer auf gängige Anwendungsfälle abgestimmter vordefinierter Werte durch den Betreiber auszuwählen oder direkt vorzugeben. Mittels des Positionssensors und der oben beschriebenen Regelung der Geschwindigkeit des Verdrängungsorgans kann die angestrebte Begrenzung der Membrangeschwindigkeit sichergestellt werden.
- Bei leicht ausgasenden Medien (wie z.B. Chlorbleichlauge) kann insbesondere beim Ansaugen, aber auch im Dosierhub bei zu hoher Strömungsgeschwindigkeit an Engstellen durch örtliches Unterschreiten des Dampfdrucks, der u.a. von der chemischen Zusammensetzung des Dosiermediums sowie dessen Temperatur abhängt, Kavitation auftreten, die erhöhten Verschleiß zur Folge hat. Kavitation kann vermieden werden, indem sowohl im Druckhub als auch während des Ansaugens, also des Zurückfahrens der Membran 13, die Geschwindigkeit durch Regelung oder auch durch einfache Drehzahlvorgabe auf Werte deutlich unterhalb einer kritischen Strömungsgeschwindigkeit begrenzt wird. Die Geschwindigkeitsvorgabe für den Regelkreis bzw. im einfachen Fall die Motordrehzahl wird hierzu so eingestellt, dass die mit der Mediumsgeschwindigkeit korrespondierende Membrangeschwindigkeit auf beispielsweise 1 mm/50ms begrenzt wird.
- Insbesondere der Ansaugvorgang ist für die Entstehung von Kavitation anfällig, da hier der statische Druck besonders niedrig ist und daher der Sicherheitsbereich bis zum Unterschreiten des Dampfdrucks sehr gering ausfällt. Für eine Verfeinerung der Methode ist es daher sinnvoll, die Membrangeschwindigkeit im Ansaugen auf geringere Werte als im Druckhub zu begrenzen. Sinnvolle Werte sind beispielsweise 1mm/50ms im Druckhub bzw. 1mm/100ms während des Ansaugens, jedoch sind natürlich auch abweichende Werte möglich. Wesentlich für eine solche individuelle Behandlung der Dosierphasen ist, dass mithilfe des Positionssensors die genaue Position der Membran jederzeit bekannt ist und so der Beginn der (besonders kritischen) Ansaugphase zuverlässig erkannt werden kann.
- Die Erfindung ermöglicht es, die mechanische Einrichtung zur Hublängeneinstellung (Verstellorgan 7 und Hubverstellbolzen 8) einzusparen. Hierzu wird der Regeleinrichtung die gewünschte Hublänge auf elektronischem Weg, z.B. durch eine Bedienereingabe, mitgeteilt. Wurde die gewünschte Hublänge ausgeführt, wird die erreichte Position der Membran 13 durch Abbremsen des Motors 2 gehalten und diese im Anschluss mit reversierter Drehrichtung des Motors zum Ansaugen zurückgefahren. Der folgende Hub kann durch Weiterdrehen des Motors über den ansaugseitigen Totpunkt hinaus mit vertauschter Drehrichtungsfolge ablaufen (Druckphase im Reversbetrieb, Ansaugen im Normalbetrieb) oder auch in derselben Reihenfolge wie der vorangegangene Hub; im erstgenannten Fall können Abbrems- und Anfahrvorgänge des Motors zwischen den Hüben und der damit verbundene Zeit- und Energiebedarf eingespart werden. Zu beachten ist, dass durch den permanenten Richtungswechsel ein fest auf der Motorwelle montierter passiver Lüfter seine Funktion nicht mehr ausreichend erfüllen kann, so dass hier die Verwendung eines fremdangetriebenen Lüfters für den Motor unerlässlich ist, falls dieser Kühlmaßnahmen benötigt.
- Für Anwendungsfälle, bei denen es auf gute Vermischung mit einem Prozessmediumsstrom ankommt, ist eine möglichst gleichmäßige Einbringung des Dosiermediums in den Prozess erforderlich. Bestimmte Anwendungen erfordern zudem die Möglichkeit, kleinste Teilmengen über sehr lange Zeit verteilt möglichst gleichmäßig zu dosieren, womit eine quasi kontinuierliche Dosierung erreicht werden soll. Für diese Fälle werden nach dem Stand der Technik Motordosierpumpen eingesetzt, die z.B. mit einem Schrittmotor und einem selbsthemmenden Getriebe arbeiten. Ein Gesamthub wird bei diesen Dosierpumpen drehzahlreduziert ausgeführt bzw. in mehrere Teilschritte mit dazwischenliegenden Ruhepausen aufgeteilt, am Ende des Gesamthubweges wird eine vollständige (schnelle) Ansaugphase ausgeführt, und danach der Dosiervorgang in der beschriebenen Weise fortgeführt.
- Bei einer bewegungsgeregelten Motordosierpumpe kann die zur Verfügung stehende Zeit, die sich aus der Wiederholfrequenz der Dosierhübe ergibt, so aufgeteilt werden, dass der nach Abzug der Ansaugdauer verbleibende Anteil bis auf eine kurze Ruhephase maximal für die Vorwärtsbewegung ausgenutzt wird. Die zu regelnde Geschwindigkeit wird hierbei aus dem zurückzulegenden Weg (eingestellte Hublänge) und der zur Verfügung stehenden Zeit berechnet. Im Gegensatz zu einer Motordosierpumpe nach dem Stand der Technik kann bei Verwendung eines Positionssensors 36 und einer Regeleinrichtung aus der zu jedem Zeitpunkt bekannten Position der Schubstange 19 die momentane Winkelstellung des Exzentergetriebes rückermittelt und in die Motordrehzahl so mit eingerechnet werden, dass die Charakteristik der Auslenkvorrichtung, die bei Verwendung eines Exzenters sinusförmig ist, ausgeglichen und der Dosierhub als exakt lineare Bewegung mit entsprechend konstanter Ausbringung des Dosiermediums ausgeführt werden kann. Die Geschwindigkeit kann in einem sehr weiten Bereich von z.B. 1 mm/min bis 1 mm/s und darüber hinaus liegen.
- Die vorher beschriebenen Einsatzmöglichkeiten des Positionsgebers z.T. zusammen mit einer Regelung zeigen, dass durch den Einsatz eines Positionssensors z.B. an der Schubstange während des gesamten Hub- und Ansaugvorgangs die genaue Lage des Verdrängungsorgans festgestellt und überwacht werden kann. Die Lagefeststellung und Überwachung führt dazu, dass situationsbezogene Steuervorgaben, die zu den beschriebenen Vorteilen führen, mittels der Istwertmessung exakt eingehalten werden.
- Wie bereits ausgeführt, dient als Bezugselement für den Positionsgeber in dem beschriebenen Ausführungsbeispiel die Schattenkante 35 am Schubbügel 20 für das Abtasten der Position, deren Schatten auf die Zeile aus CCD-Zellen 32 (CCD = charged coupled device; ladungsgekoppelter optischer Empfängerbaustein) abgebildet wird. Die bei diesem Ausführungsbeispiel näher beschriebenen aktiven Sensorelemente, die die Position erfassen, sind an der zum Dosierkopf gerichteten Seite des Schubbügels 20 angeordnet. Als Lichtquelle 33 dient eine LED, der optische Empfänger ist ein elektronischer Baustein mit einer CCD-Zeile 32, welche hier gemeinsam auf einem Zwischenteil, dem Sensorträger 31, montiert sind. Die Montage auf dem Sensorträger 31 ermöglicht es, den Positionssensor 36 im Produktionsablauf als eigenständige Baugruppe zu behandeln und z.B. getrennt vorzumontieren und außerhalb des endgültigen Einbauorts in seiner Funktion zu prüfen. Darüber hinaus stellt die beschriebene lichtschrankenähnliche Anordnung einen berührungs- und damit verschleißfrei arbeitenden Sensor dar.
- Für die grundsätzliche Funktionsweise ist der Anbringungsort des Sensors im Bereich der bewegten Einheit aus Schubbügel 20 und Schubstange 19 ohne Bedeutung, die diesbezügliche Festlegung kann vielmehr nach baulichen Gesichtspunkten wie Platzverhältnisse, Montagereihenfolge usw. getroffen werden. Im übrigen können die hier als fest montiert beschriebenen Teile (Lichtquelle 33, Empfänger 32) und diejenigen, die sich zusammen mit der Schubstange bewegen (Schattenkante 35), ihre Funktion auch tauschen.
- Der CCD-Baustein 32 wird im Ausführungsbeispiel von einer Auswerteeinheit angesteuert, die einen Mikroprozessor enthält und die benötigten Steuersignale erzeugt. Statt eines Mikroprozessors kann die Auswerteeinheit auch durch einen DSP (Digitaler Signal-Prozessor) oder in diskreter Technik realisiert werden.
- Als Lichtquelle 33 ist prinzipiell jedes Bauteil geeignet, das einen hinreichend eng begrenzten Leuchtfleck aufweist. Zusammen mit der in Fig. 7 näher dargestellten Abbildungsgeometrie bestimmt dieser die Breite des Schattenbereichs SV, s. auch Fig. 8.
- Als Lichtquelle 33 können auch mehrere Elemente oder ein Linienstrahler verwendet werden, mit deren Hilfe der Schattenverlauf SV nach besonderen Gesichtspunkten gezielt ausgebildet werden kann. Als Beispiel sei hier die Erzielung einer höheren Helligkeit genannt, ohne die Abbildungsschärfe in Bewegungsrichtung zu beeinträchtigen.
- Die CCD-Zeile 32 ist eine lineare Anordnung von M optischen Empfängern (nachfolgend Pixels genannt), die in einem regelmäßigen Raster R von einigen µm angeordnet sind. Im Beispiel sind dies 128 Pixels im Raster von etwa 64µm auf einer Gesamtlänge von ca. 8mm, d.h. M = 128 und R = 64µm.
- Die Steuersignale, die von der Auswerteeinheit erzeugt werden, legen die Belichtungszeit fest, während der die einzelnen Pixels der CCD-Zeile 32 die auftreffende Lichtmenge jeweils in einem eigenen Messverstärker innerhalb des CCD-Bausteins integrieren und zur späteren Auswertung zwischenspeichern. Diese Integration erfolgt nicht nur über die Belichtungsdauer, sondern auch über die lichtempfindliche Fläche jedes Pixels. Nach der Belichtung werden die zu den Pixels gehörenden Helligkeitswerte nacheinander durch weitere Steuersignale als Analogwerte aus dem CCD-Baustein ausgelesen und durch die Auswerteeinheit erfasst.
- Belichtung und Auslesen der Helligkeitswerte finden im einfachen Fall abwechselnd statt. Je nach Bauart bieten einige handelsübliche CCD-Zeilen-Bausteine auch Möglichkeiten für ein gleichzeitiges Ablaufen beider Vorgänge, indem sie die integrierten Messwerte nach der Belichtung zwischenspeichem und die Integratoren sofort wieder für eine nachfolgende Messung freigeben. Durch zeitgleiches Auslesen der Ergebnisse eines Messdurchgangs während der Belichtungsphase für den darauffolgenden Durchgang kann so die Messgeschwindigkeit erhöht werden.
- Im in Fig. 8 dargestellten Diagramm sind die integrierten Helligkeitswerte H dem tatsächlichen Schattenverlauf im Bereich der angesprochenen Pixels beim konkreten Ausführungsbeispiel entsprechend dargestellt. Der Schattenbereich SV erstreckt sich in diesem Beispiel über die Pixels #60 bis #63.
- Als einfaches Auswerteverfahren wird eine Entscheidungsschwelle Hv (in Fig. 8 als gestrichelte Linie dargestellt) willkürlich bei z.B. der Hälfte der Maximalhelligkeit festgelegt und dasjenige Pixel gesucht, dessen Helligkeitswert H am Schattenübergang als Erstes die Schwelle Hv unterschreitet; im Beispiel wäre dies das Pixel #62.
- Bei anderen Ausführungen kann der Helligkeitsverlauf gegenläufig von unbeleuchteten hin zu beleuchteten CCD-Zellen bei aufsteigender Pixelnummer sein; dies ist einerseits abhängig von der Anordnung der Elemente Lichtquelle 33, CCD-Baustein 32 und Schattenkörper 35 und andererseits von der internen Organisation des verwendeten CCD-Bausteins 32. In diesem Fall wird dasjenige Pixel gesucht, dessen Helligkeitswert am Schattenübergang als Erstes die Schwelle überschreitet.
- Nach Ablauf der drei Phasen Belichtung, Auslesen und Verarbeitung liegt ein Positionswert vor. Der Gesamtzeitbedarf der drei Phasen bestimmt die Folgefrequenz, mit der Positionswerte erhalten werden. Die Messauflösung ist gleich dem Pixelraster R der CCD-Zeile, korrigiert um das Abbildungsverhältnis A, welches sich aus der Montagedistanz mit den einzelnen Komponenten ergibt.
- Für das Abbildungsverhältnis A gilt (vergl. Fig. 9):

- Hierbei ist
- s =
- Tatsächliche Bewegung der Schattenkante
- s' =
- Projizierte Bewegung der Schattenkante in der Ebene des CCD
- x2 =
- Abstand zwischen optisch wirksamer Schattenkante und Lichtquelle
- x3 =
- Abstand zwischen CCD-Ebene und Lichtquelle
- Dieses Verfahren ermittelt die Position durch Auszählen von Pixels, ist also als digitales Verfahren anzusehen. Abweichungen und Verschiebungen linearer Parameter wie z.B. Bauteileempfindlichkeiten wirken sich auf das Ergebnis im Vergleich zu analogen Verfahren praktisch nicht aus. Ermittelt man das Abbildungsverhältnis A für praktische Werte, so haben Montagetoleranzen ebenfalls nur einen geringen Einfluss. In einem praktischen Ausführungsbeispiel mit x3 = 21 mm und x2 = 20mm ergibt sich ein Nominalwert für das Abbildungsverhältnis A von 1,05; d.h. eine Bewegung der Schattenkante 35 um eine bestimmte Strecke ergibt eine 1,05-fache Verschiebung des Schattenbereichs SV in der Ebene der CCD-Zellen 32. Angenommen sei nun eine Montagetoleranz für x3, d.h. eine mögliche Variation des Abstands der CCD-Zellen 32 von der Lichtquelle 33, um ±0,3mm, und ein konkreter Montagefall am oberen Ende dieses Toleranzbereichs mit x3 = 21,3mm und x2 = 20mm. In diesem Fall errechnet sich das Abbildungsverhältnis A zu 1,065. Das Abbildungsverhältnis ändert sich in diesem Beispiel um das Verhältnis 1,065/1,05 = 1,014 bzw. um +1,4%. Diese Abweichung kann durch eine einmalige Kalibrierung z.B. bei der Produktion leicht eliminiert werden. Die Linearität wird fast ausschließlich durch die Genauigkeit des Pixelrasters innerhalb der Chipgeometrie bestimmt, Abweichungen sind somit vernachlässigbar gering.
- Obgleich die vorher beschriebene Methode zur Bestimmung der Position der Schattenkante 35 und damit zur Stellung der Membran 13 bereits sehr genaue und lineare Positionswerte ergibt, kann durch Interpolation eine noch genauere Positionsauflösung erzielt werden. In dieser erweiterten Ausführung wird durch Auswertung der Pixelhelligkeiten H eine Positionsauflösung erzielt, z.B. zwischen Pixels 61 und 62 (vergl. Fig. 10), die feiner als das Pixelraster R ist, indem die Helligkeitswerte der Pixels im Bereich der Entscheidungsschwelle interpoliert werden. Ziel ist es, die Stelle zu bestimmen, an der der Helligkeitsverlauf die Entscheidungsschwelle Hv schneidet, und diesem Schnittpunkt einen Wert auf einer virtuellen Positionsskala zuzuweisen, deren x-Werte jeweils in der Mitte der Pixels genau der Pixelnummer entsprechen.
- Hierzu werden die beiden Pixels links und rechts von der Entscheidungsschwelle HV gesucht und die Abstände ΔH der zugehörigen Helligkeitswerte von dieser Schwelle bewertet. Wie in Fig. 10 bzw. in Fig. 11 dargestellt, gilt:


- Die Abstände Δx, gerechnet von der jeweiligen Mittelachse jedes der beiden benachbarten Pixels, in diesem Beispiel der Pixels #61 und #62, in Vielfachen der Pixelbreite zum Schnittpunkt bilden mit den Helligkeitsabständen ΔH folgendes Verhältnis bezogen auf das links vom gesuchten Schnittpunkt gelegene Pixel #61 (linksseitiges Nachbarpixel):

- Mit (Δxl + Δxr)= 1 (1 Pixelbreite) ergibt sich:

- Bezogen auf das rechts vom gesuchten Schnittpunkt gelegene Pixel #62 (rechtsseitiges Nachbarpixel) gilt das Verhältnis:

- Mit (Δxl + Δxr)= 1 (1 Pixelbreite) ergibt sich:

- In diesem Beispiel liegt der Schnittpunkt beim Wert 61,7. Folgt der Helligkeitsverlauf im Interpolationsbereich einer idealen Gerade, so führen beide Berechnungswege zum selben Ergebnis, es genügt also prinzipiell, eine der beiden Berechnungen durchzuführen. Mithilfe dieser Eigenschaft können jedoch Fehlerbeiträge durch einen nicht exakt geraden Helligkeitsverlauf im betrachteten Übergangsbereich oder durch immer zu erwartende Messungenauigkeiten minimiert werden, indem beispielsweise beide Berechnungen durchgeführt und deren Ergebnisse gemittelt werden.
- Bei anderen Ausführungen können je nach Helligkeitsverlauf die Verhältnisse beiderseits des Schnittpunkts bezüglich unbeleuchteter und beleuchteter CCD-Zellen vertauscht sein; in diesem Fall wechseln die Richtungsangaben links und rechts gegebenenfalls ihre Funktion und die Interpolationsgleichungen sind entsprechend anzupassen.
- Darüber hinaus sind auch andere Ausführungen möglich, bei denen die Helligkeitswerte von mehr als zwei Pixels zur Berechnung herangezogen werden. Die Position kann dann durch redundante Mehrfachberechnung und z.B. Mittelung mehrerer Ergebnisse gebildet werden. Als weitere Möglichkeit kann eine andere als die hier gezeigte lineare Interpolation bzw. eine Interpolation mit den Daten anderer als der direkten Nachbarpixels angewandt werden.
- Abweichungen und Verschiebungen linearer Parameter wie z.B. Bauteilempfindlichkeiten wirken sich auf das Ergebnis nur innerhalb des Interpolationsbereichs aus. Die Steilheit des Helligkeitsverlaufs im Schattenübergang, resultierend aus der Schärfe der Abbildung der Schattenkante auf die CCD-Ebene, ist von untergeordneter Bedeutung, da von ihr die Interpolation innerhalb weiter Grenzen nicht beeinträchtigt wird; lediglich die Linearität des Helligkeitsverlaufs ist für die Genauigkeit der Interpolation ausschlaggebend.
- Unabhängig von der vorher beschriebenen Interpolationsmethode können auf dem beschriebenen Grundprinzip aufbauend weitere Verfahren zur Verbesserung der Sensoreigenschaften genutzt werden. Diese Verfahren sind nachfolgend beschrieben:
- Verbesserung der Störimmunität durch Filterung
Die Störimmunität des Sensors kann durch Filtermaßnahmen verbessert werden. Eine Filterung kann sowohl auf Ebene der Helligkeitswerte der Pixels als auch auf das Ergebnis der Positionsermittlung selbst angewandt werden. Im ersten Fall arbeitet das Verfahren mit Helligkeitswerten, die über mehrere Pixels oder über mehrere Durchgänge gemittelt wurden, im zweiten Fall werden mehrere zunächst ermittelte Positionsergebnisse zu einem abgeleiteten Positionswert zusammengefasst, mit dem dann die weitere Bearbeitung vorgenommen wird. - Kompensation von Montageabweichungen
In einer definierten Phase, z.B. in der Ruhephase vor Ablauf des eigentlichen Dosierhubs, kann der Positionswert für diese Phase ermittelt und in einem Referenzspeicher abgelegt werden. Während der aktiven Bewegungsphase werden dann die Positionswerte relativ zu dem zuvor ermittelten Referenzwert verarbeitet. Durch dieses Verfahren ist es möglich, fertigungsbedingte Montageabweichungen der Ruhelage sowie Verschiebungen während des Betriebs z.B. durch Wärmeausdehnung automatisch zu kompensieren und damit die Genauigkeit zu verbessern. - Kompensation von Skalierungsfehlern
Bei einer erweiterten Alternative kann durch Anfahren zweier oder mehrerer bekannter Positionen, hier Referenzpositionen genannt, die Skalierung des Positionssensors abgeglichen werden. Dies kann einmalig im Zuge des Produktions- bzw. Prüfverfahrens oder auch wiederkehrend im Betrieb geschehen.
Im ersten Fall können die Referenzpositionen durch externe Einrichtungen, z.B. Raststellungen oder externe Messeinrichtungen, vorgegeben werden. Aus den in diesen Referenzpositionen gemessenen Positionswerten kann zusammen mit der Kenntnis über die wirkliche Lage der Referenzpositionen ein Korrekturwert für die Skalierung des Positionssensors abgeleitet und für die weitere Verarbeitung gespeichert werden.
Im zweiten Fall des wiederkehrenden Skalierungsabgleichs sind bekannte Positionen, z.B. mechanische Anschläge oder Referenzsignale von weiteren vorhandenen Einrichtungen zur Positionserfassung notwendig. Befindet sich die Membran während des Betriebs an einer solchen bekannten Position, kann aus dem an dieser Stelle gemessenen Positionswert ebenfalls ein Korrekturwert für die Skalierung des Positionssensors abgeleitet und für die weitere Verarbeitung gespeichert werden. - Kompensation der optischen Empfindlichkeitsparameter
In einer erweiterten Ausführung können die Helligkeitswerte der voll beleuchteten Pixels dazu herangezogen werden, um einen repräsentativen Wert für die Beleuchtungsstärke zu ermitteln. Hierzu kann beispielsweise aus einer geeigneten Gruppe von Pixels der Mittelwert der Helligkeit gebildet werden. Anhand der ermittelten Beleuchtungsstärke kann die Belichtung so gesteuert werden, dass die zur Verfügung stehenden Wertebereiche optimal ausgenutzt werden; beispielsweise kann die Lichtquelle in ihrer Helligkeit oder ihrer Einschaltdauer so gesteuert werden, dass die Beleuchtungsstärke der voll beleuchteten Pixels wenig unterhalb der Übersteuerungsgrenze des CCD-Bausteins liegt. Bei jedem Messdurchgang wird dann die Beleuchtungsstärke anhand der Verhältnisse des vorangegangenen Durchgangs so korrigiert, dass sich eine gleitende Anpassung der Belichtungsparameter an eventuelle Veränderungen von Bauteileeigenschaften, z.B. aufgrund von Alterung, ergibt. - Kompensation von Verschmutzungen und Pixelabweichungen
In einer erweiterten Ausführung kann der mechanische Aufbau des Sensors so gestaltet werden, dass in einer definierten Phase, z.B. in der Ruhephase vor Ablauf des eigentlichen Dosierhubs, der komplette für den Arbeitsweg genutzte Pixelbereich oder ein interessierender Teilbereich belichtet werden kann. Eine mögliche Ausführung ist z.B., eine der Membran zugewandte Schattenkante 35 für die Auswertung heranzuziehen, wodurch die Schattenkante im Verlauf der Hubbewegung den Sensor überstreicht und einen Bereich der CCD-Zellen abdunkelt, der im vorherigen Ruhezustand beleuchtet war. In dieser Phase können die Helligkeitswerte aller relevanten Pixels ermittelt und in einem Referenzspeicher einzeln abgelegt werden. Abweichungen der Messwerte einzelner Pixels vom Idealwert können z.B. in Form von Korrekturwerten hinterlegt werden. Während der aktiven Bewegungsphase werden dann die Helligkeitswerte jedes Pixels mit Hilfe der zuvor ermittelten Referenzwerte bei jeder Messung zunächst korrigiert und erst dann weiterverarbeitet. Durch dieses Verfahren ist es möglich, fertigungsbedingte Empfindlichkeitsabweichungen einzelner Pixels sowie Verschmutzungen in gewissem Rahmen zu kompensieren und damit die Genauigkeit zu verbessern bzw. die Betriebssicherheit zu erhöhen.
Natürlich sind für die CCD-Empfängerzeile auch zwei- oder mehrreihige Anordnungen möglich, um durch Redundanz eine erhöhte Sicherheit gegen Ausfälle, z.B. durch Verschmutzung, zu erreichen bzw. durch Mittelung die Messgenauigkeit zu erhöhen. Für besonders große Hublängen können zwei oder mehr CCD-Zeilen kombiniert werden, um den Messbereich über die Funktionsgrenzen einer einzelnen Zeile hinaus zu erweitern.
Die im Ausführungsbeispiel im Detail beschriebene Motordosierpumpe kann in einzelnen Bereichen und Anordnungen von Komponenten wie dem Motor, dem Getriebe, dem Exzenterantrieb und sonstigen Konstruktionsdetails von anderen Ausführungsvarianten abweichen. Wesentlich ist jedoch, dass die oszillierende Bewegung, die durch einen Antrieb erzeugt wird, mittels eines Positionssensors abtastbar ist, wobei der Positionssensor ein Istsignal abgibt, welches zur Position des Bezugselements und damit auch zu der des Verdrängungsorgans in einer festen Beziehung steht, so dass mithilfe dieses Wertes Kenntnis über den Bewegungsablauf des Verdrängungsorgans gewonnen wird. -
- 1
- Exzentergehäuse
- 2
- Motor (Asynchronmotor)
- 3
- Gehäuserippen
- 4
- Bodenplatte
- 5
- Gehäusedeckel
- 6
- Elektronik im Gehäusedeckel
- 7
- Verstellorgan
- 8
- Hubverstellbolzen
- 9
- Abdeckhaube
- 10
- Steuerleitungen
- 11
- Getriebe (Untersetzungsgetriebe)
- 12
- Dosierkopf
- 13
- Membran
- 14
- Einlassventil
- 15
- Auslassventil
- 16
- Dosierraum
- 17
- Exzenterwelle
- 18
- Längsachse
- 19
- Schubstange
- 20
- Schubbügel
- 21
- Anlauffläche für Exzenter
- 22
- Exzenterträger
- 23
- Druckfeder (Rückholfeder)
- 24
- Lagerscheibe
- 25
- Bund für Druckfeder
- 26
- Buchse in Lagerscheibe
- 27
- Buchse im Hubverstellbolzen
- 28
- Elektronikgehäuse
- 29
- Leistungsschaltstufen für die Motoransteuerung
- 30
- Membrankern
- 31
- Sensorträger
- 32
- Empfänger, CCD-Baustein
- 33
- Lichtquelle
- 34
- Ansteuerelektronik
- 35
- Schattenkante als Bezugselement
- 36
- Positionssensor
- 37
- Differenzierer
- 38
- Sollwertvorgabe
- 39
- Soll-Ist-Vergleich
- 40
- PID-Regler
- 41
- Lage-Korrektur
- 42
- Verstärker
- SV
- Schattenverlauf
- h
- heller Bereich
- d
- dunkler Bereich
- #58...#65
- Zellen (Pixels) des CCD
- H
- Helligkeitswerte der Pixels
- Hv
- Helligkeitswert der Vergleichsschwelle (VS)
- HI
- Helligkeitswert des Pixels links vom Schnittpunkt mit der VS (linksseitiges Nachbarpixel)
- ΔHI
- Helligkeitsabstand des linksseitigen Nachbarpixels zum Helligkeitswert der Vergleichsschwelle
- Hr
- Helligkeitswert des Pixels rechts vom Schnittpunkt mit der VS (rechtsseitiges Nachbarpixel)
- ΔHr
- Helligkeitsabstand des rechtsseitigen Nachbarpixels zum Helligkeitswert der Vergleichsschwelle
- ΔxI
- Positionsabstand der Mittellinie des linksseitigen Nachbarpixels zum Schnittpunkt mit der VS
- Δxr
- Positionsabstand der Mittellinie des rechtsseitigen Nachbarpixels zum Schnittpunkt mit der VS
- x1
- Abstand zwischen Schattenkante und CCD-Ebene
- x2
- Abstand zwischen Schattenkante und Lichtquelle
- x3
- Abstand zwischen CCD-Ebene und Lichtquelle
- p1
- Arbeitsdruck p1
- p2
- Arbeitsdruck p2
- p3
- Arbeitsdruck p3
- p4
- Arbeitsdruck p4
- xT1
- Totbereich bei Arbeitsdruck p1
- xT2
- Totbereich bei Arbeitsdruck p2
- xT3
- Totbereich bei Arbeitsdruck p3
- xT4
- Totbereich bei Arbeitsdruck p4
- s
- Tatsächliche Bewegung der Schattenkante
- s'
- Projizierte Bewegung der Schattenkante
- D
- Dosierleistung
- HL
- Mechanische Hublänge
- SG
- Stellgröße
- KSG
- Korrigierte Stellgröße
- MA(U,f)
- Motoransteuerung (Spannung, Frequenz)
- k1
- Faktor für die positionsabhängige Lagekorrektur
- k2
- Faktor für den Leistungsverstärker
- k3
- Faktor für die Ableitung des Geschwindigkeitssignals
- xS
- Sollwert der Position des Verdrängungsorgans
- xI
- Istwert der Position des Verdrängungsorgans
- xSI
- Regelabweichung der Position des Verdrängungsorgans
- vS
- Sollwert der Geschwindigkeit des Verdrängungsorgans
- vI
- Istwert der Geschwindigkeit des Verdrängungsorgans
- vSl
- Regelabweichung der Geschwindigkeit des Verdrängungsorgans
Claims (31)
- Dosierpumpe mit rotierendem Antriebsmotor und oszillierendem Verdränger, bei der die Drehbewegung eines Antriebsmotors (2) durch eine als Getriebe wirkende Anordnung in eine oszillierende Bewegung einer Schubstange (19) umgesetzt wird, so dass ein durch diese betätigtes Verdrängungsorgan bei fortlaufend rotierendem Antriebsmotor (2) eine oszillierende Linearbewegung durchführt, die in einem in der Längsachse der Schubstange (19) angeordneten Dosierkopf (12) in Zusammenwirken mit einem Auslass- und Einlassventil in abwechselnder Folge zu einem Pumphub (Druckhub) und einem Ansaughub und damit zu einer Förderung des Dosiermediums führt, dadurch gekennzeichnet, dass mit der Schubstange (19) ein Bezugselement (35) verbunden ist, dessen Position von einem Positionssensor (36) abgetastet wird, wobei der Positionssensor ein Ist-Signal (xI) abgibt, welches zur Position des Bezugselements und damit des Verdrängungsorgans in einer festen Beziehung steht und mit dessen Hilfe Kenntnis über den Bewegungsablauf des Verdrängungsorgans gewonnen wird, so dass die elektronische Steuerung der Dosierpumpe auf Betriebszustände des Dosierkreises und der Pumpe reagieren kann.
- Dosierpumpe nach Anspruch 1, dadurch gekennzeichnet, dass der Positionssensor (36) die Position des Bezugselements (35) nach einem berührungsfreien Prinzip abtastet.
- Dosierpumpe nach Anspruch 1, dadurch gekennzeichnet, dass das mit der Schubstange (19) verbundene Bezugselement (35) und der Positionssensor (36) außerhalb des Dosierkopfes angeordnet sind.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass das Bezugselement (35) den Strahlengang einer Lichtquelle (33) beeinflußt und der mit ihm zusammenwirkende Positionssensor (36), der im Pumpengehäuse oder an einem sonstigen ruhenden Teil fest angeordnet ist, nach einem lichtempfindlichen Empfängerprinzip arbeitet.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass das Bezugselement (35) ein Schattenkörper bzw. eine schattengebende Kontur ist und der mit ihm zusammenwirkende Positionssensor (36), der im Pumpengehäuse oder an einem sonstigen ruhenden Teil fest angeordnet ist, aus einem optischen Empfänger (32) in Form einer Reihe lichtempfindlicher ladungsgekoppelter Empfängerzellen besteht (charged coupled device, kurz CCD genannt).
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der Positionssensor (36) auf einem eigenen Sensorträger (31) angeordnet ist, der mit dem Pumpengehäuse oder einem sonstigen ruhenden Teil fest verbunden ist.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Lichtquelle (33), der Schattenkörper bzw. die schattengebende Kontur (35) und der Empfänger (32) eine lichtschrankenähnliche Anordnung darstellen und die Messwerte kontinuierlich oder taktweise der elektronischen Steuerung zugeführt werden.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der optische Empfänger (32) des Positionssensors (36) aus einer Anzahl linear angeordneter Empfänger (Pixels), vorzugsweise 128 Pixels, besteht.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Lichtquelle (33) eine Leuchtdiode (LED) ist, die so gegenüber dem optischen Empfänger (32) des Positionssensors (36) angeordnet ist, dass deren Lichtstrahlenbündel auf dem direkten Weg zum Empfänger durch die Schubstange (19) nicht behindert wird.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der Ausgangswert des Positionssensors (36) durch Interpolation der Helligkeitswerte mehrerer im Schattenübergangsbereich liegender Pixels gebildet wird.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass bei der Verarbeitung der Signale des Positionssensors (36) Filtermaßnahmen eingesetzt werden.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass Nulllagefehler des Positionssensors (36) mittels eines Referenzspeichers eliminiert werden.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass Skalierungsfehler des Positionssensors (36) durch Anfahren einer oder mehrerer Referenzpositionen eliminiert werden.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass Belichtungsschwankungen des Positionssensors (36) durch eine Steuerung oder Regelung der Lichtquelle (33) anhand der gewonnenen Helligkeitswerte der Pixels ausgeglichen werden.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass Helligkeitsschwankungen zwischen einzelnen Pixels des optischen Empfängers (32) durch Einbeziehen eines Referenzspeichers für die Empfindlichkeit jedes Pixels kompensiert werden.
- Dosierpumpe nach einem oder mehreren der vorgehenden Ansprüche, dadurch gekennzeichnet, dass die Erkennung, auf welchen Wert das Hubverstellorgan (7) eingestellt ist, durch Messung während der Dosierung unmittelbar über den Positionssensor (36) erfolgt.
- Dosierpumpe nach einem oder mehreren der vorgehenden Ansprüche, dadurch gekennzeichnet, dass die elektronische Steuerung durch Auswertung des Positionssensorsignals (36) eine Blockade des Verdrängungsorgans bzw. einen unvollständig ausgeführten Hub erkennt.
- Dosierpumpe nach einem oder mehreren der vorgehenden Ansprüche, dadurch gekennzeichnet, dass der Antriebsmotor (2) nach einem schlupfbehafteten Prinzip arbeitet, indem z.B. ein Asynchronmotor eingesetzt wird, und die elektronische Steuerung aus der durch die Ansteuerung vorgegebenen Solldrehzahl des Antriebsmotors und der bekannten Getriebecharakteristik eine Sollhubfrequenz bzw. eine Sollhubperiode für das Verdrängungsorgan ermittelt und zusätzlich durch Auswertung des Positionssensorsignals (36) die tatsächliche Hubfrequenz bzw. die tatsächliche Hubperiode des Verdrängungsorgans erfasst, wobei sie durch Vergleich der tatsächlichen Hubfrequenz mit der Sollhubfrequenz bzw. der tatsächlichen Hubperiode mit der Sollhubperiode des Verdrängungsorgans den Schlupf des Antriebsmotors errechnet und dessen Solldrehzahl so verändert, dass sich das Verdrängungsorgan letztendlich mit der gewünschten Hubfrequenz bewegt.
- Dosierpumpe nach einem oder mehreren der vorgehenden Ansprüche, dadurch gekennzeichnet, dass der Antriebsmotor (2) nach einem schlupfbehafteten Prinzip arbeitet, indem z.B. ein Asynchronmotor eingesetzt wird, und die elektronische Steuerung aus der durch die Ansteuerung vorgegebenen Solldrehzahl des Antriebsmotors und der bekannten Getriebecharakteristik eine Sollhubfrequenz bzw. eine Sollhubperiode für das Verdrängungsorgan ermittelt und zusätzlich durch Auswertung des Positionssensorsignals (36) die tatsächliche Hubfrequenz bzw. die tatsächliche Hubperiode des Verdrängungsorgans erfasst, wobei sie durch Vergleich der tatsächlichen Hubfrequenz mit der Sollhubfrequenz bzw. der tatsächlichen Hubperiode mit der Sollhubperiode des Verdrängungsorgans den Schlupf des Antriebsmotors errechnet und weiter die elektronische Steuerung aus dem so ermittelten Schlupf des Antriebsmotors und der bekannten Getriebecharakteristik die auf das Verdrängungsorgan wirkende Kraft ermittelt und so einen Rückschluss auf den Arbeitsdruck des Dosiermediums vornimmt.
- Dosierpumpe nach einem oder mehreren der vorgehenden Ansprüche, dadurch gekennzeichnet, dass der Antriebsmotor (2) nach einem schlupfbehafteten Prinzip arbeitet, indem z.B. ein Asynchronmotor eingesetzt wird, und die elektronische Steuerung aus der durch die Ansteuerung vorgegebenen Solldrehzahl des Antriebsmotors und der bekannten Getriebecharakteristik für jeden Moment des Dosiervorgangs eine Sollgeschwindigkeit für das Verdrängungsorgan ermittelt und zusätzlich durch Auswertung des Positionssensorsignals (36) die tatsächliche Geschwindigkeit des Verdrängungsorgans erfasst, wobei sie durch Vergleich der tatsächlichen Momentangeschwindigkeit mit der Sollgeschwindigkeit des Verdrängungsorgans den momentanen Schlupf des Antriebsmotors errechnet und daraus, wiederum in Zusammenhang mit der bekannten Getriebecharakteristik, auf den momentanen Kraftverlauf am Verdrängungsorgan schließt.
- Dosierpumpe nach Anspruch 20, dadurch gekennzeichnet, dass die elektronische Steuerung aus dem beobachteten Kraftverlauf am Verdrängungsorgan einen Rückschluss auf den Arbeitsdruck des Dosiermediums vornimmt.
- Dosierpumpe nach Anspruch 19 oder Anspruch 21, dadurch gekennzeichnet, dass die elektronische Steuerung aus dem ermittelten Arbeitsdruck des Dosiermediums einen Betrieb außerhalb des spezifizierten Druckbereichs erkennt und die Dosierung bei Überschreiten eines durch die Spezifikation der Dosierpumpe bzw. durch eine Benutzereingabe vorgegebenen maximal zulässigen Drucks bzw. bei Unterschreiten eines vorgegebenen Minimaldrucks einstellt.
- Dosierpumpe nach Anspruch 19 oder Anspruch 21, dadurch gekennzeichnet, dass das Verdrängungsorgan eine teilweise elastische Membran (13) ist, bei der die elektronische Steuerung aus dem ermittelten Arbeitsdruck des Dosiermediums und der bekannten Abhängigkeit der Dosierleistung vom Arbeitsdruck einen zu erwartenden Dosierfehler ermittelt und die Drehzahl des Antriebsmotors (2) und damit die Hubfrequenz so beeinflusst, dass diesem zu erwartenden Dosierfehler entgegengewirkt wird.
- Dosierpumpe nach einem oder mehreren der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass das aus dem Positionssensor (36) ausgelesene Signal (xI) für die Position der Schubstange (19) über einen Regelkreis im Rahmen seiner Regelgenauigkeit die Drehzahl des Antriebsmotors (2) und als Folge die Linearbewegung der Schubstange und damit des Verdrängungsorgans so beeinflusst, dass sie einem vorgegebenen Sollwertprofil (38) folgt.
- Dosierpumpe nach Anspruch 24, dadurch gekennzeichnet, dass die Regeleinrichtung alternativ die Position (im folgenden xI genannt), die Geschwindigkeit (im folgenden vI genannt) oder die Beschleunigung des Verdrängungsorgans über eine Regeleinrichtung durch Veränderung der Drehzahl des Antriebsmotors (2) beeinflusst.
- Dosierpumpe nach Anspruch 24, dadurch gekennzeichnet, dass die Regeleinrichtung vI des Verdrängungsorgans in der Ansaugphase und/oder in der Druckphase gezielt herabsetzen kann, um Druckverlusten, die durch Strömungswiderstände verursacht werden, bzw. dem Entstehen von Kavitation entgegenzuwirken.
- Dosierpumpe nach Anspruch 24, dadurch gekennzeichnet, dass die gewünschte Hublänge durch eine Bedienervorgabe der Regeleinrichtung mitgeteilt und durch die Regeleinrichtung die Bewegung des Verdrängungsorgans elektronisch auf die auszuführende Hublänge begrenzt wird, indem die Regeleinrichtung den Antriebsmotor (2) nach Ausführen der gewünschten Hublänge anhält, in den Reversierbetrieb umschaltet und so im Anschluss einen Ansaughub durchführt und den Motor dann anhält bzw. den darauffolgenden Druckhub ausführt.
- Dosierpumpe nach Anspruch 24, dadurch gekennzeichnet, dass die Regeleinrichtung die Vorwärtsbewegung des Verdrängungsorgans während der Druckphase durch Ansteuern des Antriebsmotors (2) so auf die durch die Folgefrequenz der Dosierhübe vorgegebene Zeit verteilt, dass die Ausbringung des Dosiermediums möglichst gleichmäßig erfolgt, bis hin zu sehr langsam ausgeführten Dosierhüben von z.B. einigen Minuten.
- Dosierpumpe nach Anspruch 20, dadurch gekennzeichnet, dass das Verdrängungsorgan eine teilweise elastische Membran (13) ist und die elektronische Steuerung aus dem momentanen Kraftverlauf an der Membran (13) das Öffnen des Auslassventils (15) erkennt und mithilfe dieser Beobachtung den Totbereich, der aufgrund der elastischen Verformung der Membran (13) entsteht, misst.
- Dosierpumpe nach Anspruch 29, dadurch gekennzeichnet, dass der tatsächlich ausgeführte Hubweg abhängig von der ermittelten Membranverformung beeinflusst wird, indem die Regeleinrichtung den Antriebsmotor (2) nach Ausführen der gewünschten Hublänge ab dem Öffnen des Auslassventils (15) anhält, in den Reversierbetrieb umschaltet und so im Anschluss einen Ansaughub durchführt und den Motor dann anhält bzw. den darauffolgenden Druckhub ausführt, so dass der durch die Membranverformung verursachte Fehlerbeitrag (bezogen auf den Hubweg bzw. das dosierte Volumen) eliminiert und so die Abhängigkeit der Dosiermenge vom Gegendruck wesentlich vermindert wird.
- Dosierpumpe nach Anspruch 29, dadurch gekennzeichnet, dass die tatsächlich ausgeführte Hubfrequenz abhängig von der ermittelten Membranverformung beeinflusst wird, indem die Regeleinrichtung einen Korrekturwert für den durch die Membranverformung verursachten Fehlerbeitrag (bezogen auf den Hubweg bzw. das dosierte Volumen) ermittelt und die Solldrehzahl des Antriebsmotors (2) mithilfe dieses Korrekturwerts so verändert, dass der durch die Membranverformung verursachte Fehlerbeitrag eliminiert wird.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102005039237A DE102005039237A1 (de) | 2005-08-19 | 2005-08-19 | Motordosierpumpe |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1754891A2 true EP1754891A2 (de) | 2007-02-21 |
| EP1754891A3 EP1754891A3 (de) | 2008-08-20 |
| EP1754891B1 EP1754891B1 (de) | 2016-05-18 |
Family
ID=37081634
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP06119205.0A Active EP1754891B1 (de) | 2005-08-19 | 2006-08-18 | Motordosierpumpe |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20070041845A1 (de) |
| EP (1) | EP1754891B1 (de) |
| JP (1) | JP2007051645A (de) |
| DE (1) | DE102005039237A1 (de) |
| ES (1) | ES2581979T3 (de) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102007027168A1 (de) * | 2007-06-13 | 2008-12-18 | Marco Systemanalyse Und Entwicklung Gmbh | Dosiervorrichtung |
| WO2011117199A1 (de) | 2010-03-24 | 2011-09-29 | Prominent Dosiertechnik Gmbh | Verfahren zum steuern und/oder regeln einer dosierpumpe |
| WO2017198458A1 (de) * | 2016-05-17 | 2017-11-23 | Dürr Systems Ag | Beschichtungsmittelpumpe |
| WO2018015285A1 (de) * | 2016-07-18 | 2018-01-25 | Prominent Gmbh | Dosiereinrichtung mit kommunikationsschnittstelle |
| WO2018050525A1 (de) * | 2016-09-15 | 2018-03-22 | Prominent Gmbh | Verfahren zum betreiben von dosiereinrichtungen |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8540493B2 (en) * | 2003-12-08 | 2013-09-24 | Sta-Rite Industries, Llc | Pump control system and method |
| US7845913B2 (en) | 2004-08-26 | 2010-12-07 | Pentair Water Pool And Spa, Inc. | Flow control |
| US8043070B2 (en) | 2004-08-26 | 2011-10-25 | Pentair Water Pool And Spa, Inc. | Speed control |
| US8602745B2 (en) | 2004-08-26 | 2013-12-10 | Pentair Water Pool And Spa, Inc. | Anti-entrapment and anti-dead head function |
| US8019479B2 (en) | 2004-08-26 | 2011-09-13 | Pentair Water Pool And Spa, Inc. | Control algorithm of variable speed pumping system |
| US7874808B2 (en) * | 2004-08-26 | 2011-01-25 | Pentair Water Pool And Spa, Inc. | Variable speed pumping system and method |
| US8469675B2 (en) | 2004-08-26 | 2013-06-25 | Pentair Water Pool And Spa, Inc. | Priming protection |
| US8480373B2 (en) | 2004-08-26 | 2013-07-09 | Pentair Water Pool And Spa, Inc. | Filter loading |
| US7686589B2 (en) | 2004-08-26 | 2010-03-30 | Pentair Water Pool And Spa, Inc. | Pumping system with power optimization |
| SE529328C2 (sv) * | 2005-11-15 | 2007-07-10 | Johan Stenberg | Styrsystem samt metod för styrning av elektromagnetiskt drivna pumpar |
| US20090288598A1 (en) * | 2008-05-21 | 2009-11-26 | Harris & Bruno Machine Co., Inc. | Doctor blade supply system with intelligent viscosity logic |
| EP3418570B1 (de) | 2008-10-06 | 2020-01-22 | Pentair Water Pool and Spa, Inc. | Verfahren für den betrieb eines sicherheitsvakuumablasssystems |
| US8425200B2 (en) | 2009-04-21 | 2013-04-23 | Xylem IP Holdings LLC. | Pump controller |
| US8564233B2 (en) | 2009-06-09 | 2013-10-22 | Sta-Rite Industries, Llc | Safety system and method for pump and motor |
| US9556874B2 (en) | 2009-06-09 | 2017-01-31 | Pentair Flow Technologies, Llc | Method of controlling a pump and motor |
| US20110081265A1 (en) * | 2009-10-06 | 2011-04-07 | Williams Hansford R | Pulse pump |
| AU2011338297B2 (en) | 2010-12-08 | 2016-10-13 | Pentair Water Pool And Spa, Inc. | Discharge vacuum relief valve for safety vacuum release system |
| ES2727811T3 (es) * | 2011-09-09 | 2019-10-18 | Graco Minnesota Inc | Un sistema de bomba y un método de funcionamiento de una bomba |
| BR112014010665A2 (pt) | 2011-11-01 | 2017-12-05 | Pentair Water Pool & Spa Inc | sistema e processo de bloqueio de vazão |
| US9885360B2 (en) | 2012-10-25 | 2018-02-06 | Pentair Flow Technologies, Llc | Battery backup sump pump systems and methods |
| US10036378B2 (en) * | 2013-02-28 | 2018-07-31 | Ingersoll-Rand Company | Positive displacement pump with pressure compensating calibration |
| RU2674293C2 (ru) * | 2014-01-07 | 2018-12-06 | Флюид Хэндлинг ЭлЭлСи | Устройство с множеством насосов изменяемой скорости для обеспечения экономии энергии посредством расчета и компенсации потерь на трение, используя показатель скорости |
| EP3146211A4 (de) * | 2014-05-20 | 2018-02-14 | Ying Lin Cai | Exzenter-rondellstruktur für komprimierende membranpumpe mit mehrfachwirkung |
| CN105443339A (zh) * | 2015-11-27 | 2016-03-30 | 苏州巧泰精密机械有限公司 | 计量泵往复驱动回位装置 |
| JP6892982B2 (ja) * | 2017-02-03 | 2021-06-23 | 応研精工株式会社 | ダイヤフラムポンプ |
| EP3981984B1 (de) * | 2018-07-06 | 2024-04-17 | Grundfos Holding A/S | Dosierpumpe und verfahren zur steuerung einer dosierpumpe |
| DE102018133214A1 (de) | 2018-12-20 | 2020-06-25 | Lutz-Jesco Gmbh | Dosierpumpe mit integriertem Überströmventil und Ventileinsatz für eine Dosierpumpe |
| DE102019215952A1 (de) * | 2019-10-16 | 2021-04-22 | Robert Bosch Gmbh | Membranpumpe, System und Verfahren zur optischen Bestimmung eines Auslenkungszustands einer Membran der Membranpumpe |
| CN114992080B (zh) * | 2022-06-01 | 2024-04-26 | 南京市水利规划设计院股份有限公司 | 一种水资源计量控制装置及其控制方法 |
| WO2024010798A2 (en) * | 2022-07-08 | 2024-01-11 | Graco Minnesota Inc. | Pump and fluid displacer for a pump |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0798558A2 (de) | 1996-03-29 | 1997-10-01 | Shimadzu Corporation | Kolbenpumpe für Hochleistungschromatographie |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3756456A (en) * | 1972-05-22 | 1973-09-04 | Graco Inc | Apparatus and method for a metering system |
| DE2805946A1 (de) * | 1978-02-13 | 1979-08-16 | Bayer Ag | Vorrichtung zum dosieren mindestens zweier fliessfaehiger reaktionskomponenten in eine mischkammer |
| DE2937066A1 (de) * | 1979-09-13 | 1981-03-26 | Clinicon International Gmbh, 6800 Mannheim | Dosiervorrichtung |
| DE3139925A1 (de) * | 1981-10-08 | 1983-07-14 | Hewlett-Packard GmbH, 7030 Böblingen | Hochdruck-dosierpumpe |
| DE3320386C2 (de) * | 1983-06-06 | 1987-03-19 | Bran & Lübbe GmbH, 2000 Norderstedt | Kolben- oder Kolbenmembranpumpe |
| DE3825295C2 (de) * | 1988-07-26 | 1994-05-11 | Heidelberger Druckmasch Ag | Vorrichtung zur Erfassung der Position einer Papierkante |
| US4971522A (en) * | 1989-05-11 | 1990-11-20 | Butlin Duncan M | Control system and method for AC motor driven cyclic load |
| US5280222A (en) * | 1989-06-01 | 1994-01-18 | Papst Motoren Gmbh & Co. Kg | Apparatus and method for controlling brushless electric motors and position encoders and indicating position thereof |
| US5056036A (en) * | 1989-10-20 | 1991-10-08 | Pulsafeeder, Inc. | Computer controlled metering pump |
| US5249932A (en) * | 1991-10-07 | 1993-10-05 | Erik Van Bork | Apparatus for controlling diaphragm extension in a diaphragm metering pump |
| JP3809661B2 (ja) * | 1995-12-28 | 2006-08-16 | ソニー株式会社 | 動き検出装置および動き検出方法 |
| JP3863292B2 (ja) * | 1998-05-29 | 2006-12-27 | シーケーディ株式会社 | 液体供給装置 |
| DE10139030A1 (de) * | 2000-08-29 | 2002-05-08 | Andreas Hindrichs | Messvorrichtung zum Vermessen eines Werkstückes |
| DE10322868A1 (de) * | 2003-05-21 | 2004-12-16 | Lang Apparatebau Gmbh | Verfahren zur Regelung einer von einem elektromotorisch angetriebenen Exzenter betätigten Membran- oder Kolbenpumpe |
-
2005
- 2005-08-19 DE DE102005039237A patent/DE102005039237A1/de not_active Ceased
-
2006
- 2006-08-18 US US11/506,355 patent/US20070041845A1/en not_active Abandoned
- 2006-08-18 JP JP2006223507A patent/JP2007051645A/ja active Pending
- 2006-08-18 EP EP06119205.0A patent/EP1754891B1/de active Active
- 2006-08-18 ES ES06119205.0T patent/ES2581979T3/es active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0798558A2 (de) | 1996-03-29 | 1997-10-01 | Shimadzu Corporation | Kolbenpumpe für Hochleistungschromatographie |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102007027168A1 (de) * | 2007-06-13 | 2008-12-18 | Marco Systemanalyse Und Entwicklung Gmbh | Dosiervorrichtung |
| WO2011117199A1 (de) | 2010-03-24 | 2011-09-29 | Prominent Dosiertechnik Gmbh | Verfahren zum steuern und/oder regeln einer dosierpumpe |
| DE102010003218A1 (de) | 2010-03-24 | 2011-09-29 | Prominent Dosiertechnik Gmbh | Verfahren zum Steuern und/oder Regeln einer Dosierpumpe |
| WO2017198458A1 (de) * | 2016-05-17 | 2017-11-23 | Dürr Systems Ag | Beschichtungsmittelpumpe |
| WO2018015285A1 (de) * | 2016-07-18 | 2018-01-25 | Prominent Gmbh | Dosiereinrichtung mit kommunikationsschnittstelle |
| EP3485166B1 (de) | 2016-07-18 | 2020-04-15 | ProMinent GmbH | Dosiereinrichtung mit kommunikationsschnittstelle |
| WO2018050525A1 (de) * | 2016-09-15 | 2018-03-22 | Prominent Gmbh | Verfahren zum betreiben von dosiereinrichtungen |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2581979T3 (es) | 2016-09-08 |
| DE102005039237A1 (de) | 2007-02-22 |
| JP2007051645A (ja) | 2007-03-01 |
| EP1754891A3 (de) | 2008-08-20 |
| EP1754891B1 (de) | 2016-05-18 |
| US20070041845A1 (en) | 2007-02-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1754891B1 (de) | Motordosierpumpe | |
| EP1757809B1 (de) | Bewegungs- und geschwindigkeitsgeregelte Magnetdosierpumpe | |
| EP2550454B1 (de) | Verfahren zum regeln einer dosierpumpe | |
| DE4233243C2 (de) | Vorrichtung und Verfahren zur Steuerung des Drehmomentes eines bürstenlosen Gleichstrommotors | |
| DE3885193T2 (de) | Verdrängerpumpe mit geringer Druckschwankung. | |
| DE202005013090U1 (de) | Motordosierpumpe | |
| DE69302765T2 (de) | Elektronische Sensor-Einrichtung für eine mittels Fluid angetriebene Membranpumpe | |
| DE3874883T2 (de) | Fluessigkeitsfoerdernde kolbenpumpe. | |
| EP0279931A2 (de) | Membranpumpvorrichtung | |
| WO2003054392A1 (de) | Dosierpumpe | |
| WO2007099000A1 (de) | Verfahren zum justieren eines kolbens in einem linearverdichter | |
| EP2184492B1 (de) | Verfahren zur Peristaltikpumpensteuerung | |
| EP2913526A1 (de) | Verfahren zum Fördern von Hydraulikfluid und elektrohydraulische Motor-Pumpen-Einheit dafür | |
| DE202005013089U1 (de) | Magnetdosierpumpe | |
| DE3420345C2 (de) | ||
| EP3336351A1 (de) | Kammerpumpe und verfahren zum betrieb einer kammerpumpe | |
| DE2737062B1 (de) | Schubkolbenpumpe zur pulsationsfreien Foerderung einer Fluessigkeit | |
| EP3458201B1 (de) | Beschichtungsmittelpumpe | |
| DE102016108120A1 (de) | Dosierpumpe und Verfahren zum Betreiben einer Dosierpumpe | |
| EP2773265A1 (de) | Analytisches handgerät und verfahren zu dessen betrieb | |
| DE2931017A1 (de) | Druckverstaerkersystem, insbesondere zur fluessigkeitsfoerderung in fluessigkeitschromatographen | |
| EP1299645B1 (de) | Verfahren zum ansteuern eines elektromotors einer dosierpumpe | |
| EP0367099A2 (de) | Flüssigkeits-Kolbenpumpe für chromatographische Analysegeräte | |
| DE2611935C2 (de) | Hydraulische Meßbrücke | |
| DE10033995A1 (de) | Verfahren zum Steuern einer elektromotorisch angetriebenen Dosierpumpe |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK RS |
|
| 17P | Request for examination filed |
Effective date: 20081205 |
|
| 17Q | First examination report despatched |
Effective date: 20090306 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160210 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN Ref country code: AT Ref legal event code: REF Ref document number: 800741 Country of ref document: AT Kind code of ref document: T Effective date: 20160615 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502006014950 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2581979 Country of ref document: ES Kind code of ref document: T3 Effective date: 20160908 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20160518 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160919 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160819 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502006014950 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| 26N | No opposition filed |
Effective date: 20170221 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160831 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160818 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 12 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160818 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 800741 Country of ref document: AT Kind code of ref document: T Effective date: 20160818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20060818 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160518 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20180822 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20190822 Year of fee payment: 14 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20190818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190818 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20210108 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190819 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200831 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20230825 Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240819 Year of fee payment: 19 |