EP1569850B1 - Etikettiervorrichtung für bewegte gegenstände und verfa hren zur etikettierung von bewegten gegenständen - Google Patents
Etikettiervorrichtung für bewegte gegenstände und verfa hren zur etikettierung von bewegten gegenständen Download PDFInfo
- Publication number
- EP1569850B1 EP1569850B1 EP03773673A EP03773673A EP1569850B1 EP 1569850 B1 EP1569850 B1 EP 1569850B1 EP 03773673 A EP03773673 A EP 03773673A EP 03773673 A EP03773673 A EP 03773673A EP 1569850 B1 EP1569850 B1 EP 1569850B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- stamp
- accordance
- labelling
- time
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000002372 labelling Methods 0.000 title claims abstract description 76
- 238000000034 method Methods 0.000 title claims abstract description 17
- 238000006073 displacement reaction Methods 0.000 claims abstract description 72
- 230000008878 coupling Effects 0.000 claims description 6
- 238000010168 coupling process Methods 0.000 claims description 6
- 238000005859 coupling reaction Methods 0.000 claims description 6
- 230000003287 optical effect Effects 0.000 claims description 6
- 238000001514 detection method Methods 0.000 claims description 5
- 238000007654 immersion Methods 0.000 claims description 4
- 238000011156 evaluation Methods 0.000 description 13
- 230000008859 change Effects 0.000 description 11
- 238000005259 measurement Methods 0.000 description 8
- 230000001133 acceleration Effects 0.000 description 3
- 230000002349 favourable effect Effects 0.000 description 3
- 230000001939 inductive effect Effects 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 230000000737 periodic effect Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 230000008439 repair process Effects 0.000 description 2
- 230000000284 resting effect Effects 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C9/00—Details of labelling machines or apparatus
- B65C9/26—Devices for applying labels
- B65C9/36—Wipers; Pressers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C9/00—Details of labelling machines or apparatus
- B65C9/08—Label feeding
- B65C9/18—Label feeding from strips, e.g. from rolls
- B65C9/1865—Label feeding from strips, e.g. from rolls the labels adhering on a backing strip
- B65C9/1876—Label feeding from strips, e.g. from rolls the labels adhering on a backing strip and being transferred by suction means
- B65C9/1884—Label feeding from strips, e.g. from rolls the labels adhering on a backing strip and being transferred by suction means the suction means being a movable vacuum arm or pad
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C9/00—Details of labelling machines or apparatus
- B65C9/40—Controls; Safety devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C9/00—Details of labelling machines or apparatus
- B65C9/40—Controls; Safety devices
- B65C2009/401—Controls; Safety devices for detecting the height of articles to be labelled
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T156/00—Adhesive bonding and miscellaneous chemical manufacture
- Y10T156/17—Surface bonding means and/or assemblymeans with work feeding or handling means
- Y10T156/1702—For plural parts or plural areas of single part
- Y10T156/1744—Means bringing discrete articles into assembled relationship
Definitions
- the invention relates to a labeling device for moving objects, with a punch which is guided displaceably and by means of which a label can be positioned on an object.
- the invention relates to a method for labeling moving objects by means of a stamp.
- Such devices and methods are known, for example, from EP 0 846 074 B1 or DE 199 52 375 A1. From EP 0 090 631 a labeling device with a measuring device for determining the stamp displacement extension is known.
- the invention has for its object to provide a labeling and a method for labeling of moving objects, in which or in which a high reproducibility of the labeling process is achieved on the moving objects.
- a measuring device for determining a stamp displacement time, wherein the stamp displacement time is determined by the duration of the movement of the stamp on the object.
- the stamp is moved by compressed air cylinder.
- the exact spatio-temporal movement of the stamp is therefore not known.
- the exact placement of a label is determined by the fact that the moving object and the stamp must be synchronized with each other.
- An important parameter of this synchronization is the labeling time, namely the time required for labeling.
- the speed of the moving object and the labeling time must be coordinated if a label and in particular a self-adhesive label is to be applied to the object at a defined position.
- the labeling time in turn, essentially consists of a known system time and the stamp displacement time, which can only be estimated inaccurately.
- the stamp displacement time is measured, d. H. is detected with the measuring device.
- the labeling time can be accurately calculated and, in turn, a high accuracy in the label placement can be achieved if the calculated Etikettierzeit is considered accordingly.
- stamp displacement time for a particular type of article is measured once and stored.
- the object can rest relative to a holding device of the punch.
- stamp shift time is remeasured after maintenance or repair work on the labeling.
- the stamp displacement time for the respective articles may be determined and then taken into account in future labeling devices.
- the stamp displacement time is determined by the time interval of the displacement of the stamp from a starting position until reaching the object.
- this stamp displacement time can be measured, d. H. determine with high accuracy, without the equations of motion of the stamp displacement must be known.
- the starting position is in particular a position in which the stamp receives a label or an intermediate position, wherein the time period is known, which requires the stamp from the receiving position until reaching the intermediate position.
- a labeling time is determined by the sum of a system time and the stamp shift time.
- the system time which is composed for example of system-related waiting times, a transfer time for labels on the stamp and a rotation time, is system-dependent and known in principle.
- the unknown size in the labeling time namely the stamp displacement time, is measured according to the invention.
- the labeling time is decisive so that a labeling process can be started in good time if a label is to be positioned at a certain point of the article. Since, according to the invention, the stamp displacement time is measured, the labeling time can be determined explicitly. In particular, by the measuring device, the stamp displacement time is continuously measurable, so that changes in the stamp displacement, as for example by temperature changes or by slow varying height changes are caused in the objects to be labeled, are considered.
- the Stempelverschiebungszeit after changes in the mechanical system such as after maintenance, repair or replacement of a piston easily re-determine, so that a secure labeling function is guaranteed.
- the measuring device determines the stamp displacement time without contact, so as to keep the wear and the maintenance effort low.
- the measuring device comprises a sensor device and a transducer device in order to achieve a high accuracy in the measurement of the stamp displacement time.
- the sensor device or transducer device can then define a measuring range, which in particular includes the possible linear movement distance of the punch.
- the senor device and the transmitter device are displaceable relative to one another in order to be able to perform a time recording.
- the sensor device or transducer device is arranged stationary relative to a holding device of a punch guide and the transducer device or sensor device with the punch is displaceable. This can determine whether the stamp is still moving or whether it is stopped. This in turn allows the stamp shift time to be determined as the time interval between an initial position of the stamp and the arrival of the item.
- the measuring device determines the stamp displacement time via magnetic coupling between the sensor device and the encoder device.
- the transducer device comprises a magnet and the sensor device comprises a plurality of Hall sensors, which couple contactlessly to the magnet.
- the sensor device comprises a plurality of Hall sensors, which couple contactlessly to the magnet.
- more than two Hall sensors are provided, which are arranged along the possible movement path of the punch.
- the Hall sensors are arranged in at least one row.
- the Hall sensors are then arranged aligned in a row, in particular substantially parallel to a direction of displacement of the punch.
- a measuring range can be defined.
- On the number of sensors in a row and / or on the number of rows can be a Meßaufling set.
- an evaluation device of the measuring device is connected so that signals of each individual Hall sensor can be evaluated. Then, when the stamp with the encoder device (in particular a magnet) moves along the row and then the Hall sensors in turn provide a switching signal, then the stamp shift time can be determined in a simple and accurate manner.
- the Hall sensors are arranged so that during the movement of the stamp always at least one Hall sensor delivers a switching signal. This can be determined in a secure manner, whether the punch is still moving or resting.
- the Hall sensors are arranged and wired so that adjacent Hall sensors associated signals overlap in time. This can be effected for example via a monoflop. Due to the temporal overlap, an evaluation can be realized by means of the rest of the stamp is easily recognizable.
- a time detection signal is then formed which remains in the same switching state during the movement of the punch.
- the time detection signal (interrupt signal) is then preferably placed in this switching state when the first Hall sensor of the sensor device provides a switching signal and remains in this switching state until the sensor device detects no movement of the punch more.
- the length of the time detection signal is then a measure of the stamp shift time.
- Hall sensors can also be provided a plurality of rows of Hall sensors, wherein the Hall sensors are arranged and connected so that in different rows phase-shifted switching signals can be generated.
- the Hall sensors of a series are connected in common, ie, a row has an output terminal, which is assigned to the entirety of the Hall sensors of the series. Over such rows, which generate phase-shifted signals with respect to adjacent rows, a high resolution can be achieved.
- the sensor device and the encoder device are optically coupled with one another.
- the encoder device is provided with a coding aligned along the direction of movement of the stamp, which is readable by the sensor device.
- the coding is preferably arranged stationary with respect to the stamp in order to be able to detect a movement of the stamp.
- the coding has coding fields which are evenly spaced.
- the coding fields are formed for example by light-dark contrasts.
- the sensor device then comprises optical sensors which respond to such light-dark contrasts. It can then be detected in a simple manner, a movement or a rest of the stamp, if just the sensor device detects a change in contrast or detected no more contrast change.
- the sensor device comprises two optical sensors which are arranged substantially at half the spacing of the coding fields. It can then achieve a higher resolution with little effort.
- the transducer device comprises a generator for a light field such as a light grid, wherein the stamp in the light field is submerged and the light field is at least partially shielded by the stamp in dependence on the immersion depth relative to a sensor device.
- the depth of immersion can be determined by this and, in turn, the stamp displacement time can be determined.
- the height of the object which is to be labeled can also be determined when the object is immersed in the light field. In particular, it can then be determined in a simple manner when the stamp has reached the object; this is the case when the stamp and the object maximally shield the light field.
- the shield by the stamp is temporally determined.
- a distance sensor which measures the distance of the punch to a holding device of the punch. This distance measurement is carried out in particular optically. But it can also be done inductively. From a change of this distance can determine whether the punch is still moving or resting.
- the above-mentioned object is achieved in a method for labeling of moving objects by means of a stamp according to the invention that a Stempelverschiebungszeit is measured as the duration of the punch movement from a starting position until reaching the object.
- the labeling time which determines the movement between the moving object to be labeled and the stamp and thus the positioning of the labels on the object, determined as the sum of a system time, which is basically known, and the measured stamp displacement time.
- the determined stamp shift time is stored and can then be used for future labeling operations, i. H. for the next objects to be used.
- the stored stamp displacement time is used to synchronize the stamp and the articles to be labeled. It is also favorable if the stamp displacement time is continuously measured. It may then also be considered changes in the stamp displacement, as caused for example by slowly varying changes in the height of the item or by temperature changes.
- the measured stamp displacement time is used to adjust the impact of the stamp on the article.
- the determined stamp displacement time can be used to minimize the placement time of the stamp on the object.
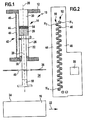
- a first embodiment of a labeling device according to the invention which is shown in Figure 1 and designated as a whole with 10, comprises a holding device 12 which is fixed in position.
- a punch device designated as a whole by 14 can be positioned with respect to a transport device for moving objects 16.
- the transport device (not shown in the drawing) comprises, for example, a conveyor belt, on which the moving objects 16 are guided past the stamp device 14.
- the stamping device 14 comprises a punch 18, which is movable in a displacement direction 20.
- the displacement direction 20 is transverse and in particular perpendicular to a transport direction 22 for the moving objects 16.
- the punch 18 labels are positioned on a surface 24 of the moving objects 16.
- the articles 16 are in particular packaged goods.
- the punch device 14 To move the punch 18, the punch device 14 includes a cylinder 26 in which a piston 28 is slidable. Via a piston rod 29 the piston 28 is connected to the punch 18.
- a first pressure chamber 30 is formed, which is delimited by the one end of the piston 28, and a second pressure chamber 32, which is bounded by the other end of the piston 28.
- the two pressure chambers 30, 32 are each provided with connections in order to generate an overpressure or negative pressure in these. If, for example, an overpressure is generated in the first pressure chamber 30 and a negative pressure is generated in the second pressure chamber 32, then the punch 18 is moved towards the object 16. If an overpressure is generated in the second pressure chamber 32 and a negative pressure is generated in the first pressure chamber 30, then the punch 18 is moved away from the object. By alternating generation of overpressure and negative pressure in the pressure chambers 30 and 32, an up and down movement of the punch 18 can be achieved and thus a periodic positioning of labels on moving objects 16.
- a suction plate 36 is arranged, on which the punch 18 receives a label for depositing on the object 16.
- a starting position of the punch 18 is then defined, so that the punch 18 has a defined starting position, from which he can take labels in order to then position them after the movement on the moving objects 16 on this.
- This starting position 40 is below a stop position of the piston 28 in the cylinder 26th
- rotation of the punch 18 may be provided to position the label relative to the article 16.
- the labeling time T E required for labeling a moving object 16 is composed of a system time T sys and a stamp displacement time T S.
- the system time T sys is due to known system-related latencies and known times, which are determined by the inclusion of labels by the punch 18 and its positioning thereto in the starting position 40 (including, for example, a rotation time for rotation of the punch 18).
- the punch displacement time T S is the time required for the punch 18 to move from its home position 40 during an extension operation until it reaches the object 16.
- the starting position 40 is the position of the punch 18 in which it receives a label.
- the initial position can also be an intermediate position, wherein the duration of the punch movement is known from a receiving position to the intermediate position (as part of T sys ).
- This stamp shift time T S is basically unknown; Since the equations of motion of the displacement of the punch 18 are not known, they can not be determined by calculation. According to the invention, for example, it is measured at a stationary object 16.
- the stamp shifting time may change because the For example, due to changes in temperature, stamp displacement may change or, for example, due to responses in the height of objects 16, which may then be small or slow changes in subject height.
- a measuring device 42 is now provided for determining the stamp displacement time T S.
- the stamp displacement time T S can be continuously detected. It can be determined and stored for a specific item type 16.
- the stamp shifting time T S may be adapted to changing conditions such as temperature changes or small variations in the subject height and the stored value may be corrected, for example as the last valid average value.
- a sensor device 44 which comprises a plurality of Hall sensors 46 which are arranged on a printed circuit board 48 (FIG. 2).
- the Hall sensors are arranged in one or, as shown in Figure 2, in two rows 50, 52.
- the Hall sensors 46 are each aligned parallel to the displacement direction 20, wherein the Hall sensors of the two rows 50, 52 are arranged offset relative to each other, ie sitting between adjacent Hall sensors of the row 52 each transverse to the direction of displacement 20 spaced a Hall sensor of the row 50 in order to accommodate a large number of Hall sensors H 1 to H n on the board 48 can.
- the sensor device 44 is arranged on the holding device 12.
- a permanent magnet 54 is arranged as a transducer device, which is displaceable with the piston 28 in the cylinder 26.
- the magnet 54 travels along the rows 50, 52 of the Hall sensors 46 and generates magnetic coupling therewith the respective sensors a corresponding signal.
- the permanent magnet 54 is, for example, an axially magnetized disc magnet.
- the Hall sensors 46 (H 1 to H n ) may be bipolar sensors that switch regardless of the direction in which the magnetic field hits them, or unipolar sensors that only switch when the magnetic field is within a certain range Direction meets her. Unipolar sensors can be arranged closer to each other and thus achieve a higher resolution.
- an evaluation device 56 is arranged, which evaluates the signals of the Hall sensors H 1 to H n , so as to determine the stamp shift time T S.
- each Hall sensor H 1 to H n is connected to the evaluation device 56 so that it can receive the switching signals of the individual Hall sensors 46.
- the evaluation device 56 is connected via a release signal line 58 to a microcontroller, which can then activate the evaluation device accordingly.
- the respectively applied Hall sensor generates a switching signal, which is supplied to the evaluation device 56.
- a retriggerable monoflop is triggered.
- the falling edge of a specific Hall sensor 46 triggers the monoflop only once.
- Each further falling edge of the switching signals of the Hall sensors H 2 to H n triggers the monoflop again.
- the monoflop tilts to its steady state and triggers an interrupt via an interrupt line 62.
- the duration of the triggering of the interrupt is a measure of the stamp shift time T S.
- the Hall sensors 46 are positioned so close that the interrupt is not triggered until the punch 18 rests.
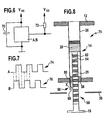
- the Hall sensors 46 are arranged in staggered rows A and B, wherein the Hall sensors of the respective rows A and B connected to each other and connected to an evaluation 68. Output terminals of the Hall sensors, group A and group B, are combined and connected to the evaluation device 68. Between a supply voltage rail and a ground terminal of the Hall sensors 46, a capacitor 70 for debubbling is connected ( Figure 6). The supply voltage is supplied via a resistor 72 to the Hall sensors 46.
- the Hall sensors of the adjacent rows A and B are connected and arranged so that corresponding switching signals 74, 76 a phase shift of 90 °, for example, as shown in FIG. Then moves the magnet 54, which is in particular a radially magnetized magnet, along the board with the Hall sensors 46, which are arranged in the rows A and B, then arises for the sensors of the row A, a periodic signal 74 and for the sensors of the row B a phase-shifted periodic signal 76.
- evaluating 68 can be evaluated by summation and / or difference, the number of signal changes in the sum signal and / or difference signal.
- the stamp shift time T S can then be determined therefrom.
- the direction of movement of the punch 18 can be determined. As a result, the impact of the punch 18 on the object 16 can also be determined by rebounding the punch 18.
- the punch displacement time T S is measured and stored as the duration of the punch movement from the home position 40 until reaching the object 16. In the calculation of the labeling time T E then this stamp shift time T S is taken into account.
- the stamp shift time is determined and stored, for example, for a specific object type. With continuous measurement of the stamp displacement time in conjunction, for example, with an averaging, the labeling process can then be adapted to changing conditions such as, for example, changing the stamp movement due to temperature changes or slow changes in the object height. The last valid value is stored as an average, for example can then be used in a new labeling for just this item as the starting point.
- the stamp displacement time for the respective object height can be determined taking into account the height of these objects and taken into account in future labeling operations.
- the labeling time T E is known for a specific type of object since the stamp displacement time T S was measured. This ensures that labels are placed with high accuracy on the moving objects 16, since an object 16, which moves at the speed V, moves during the labeling time by the distance V x T E and thus just with knowledge of the stamp displacement time T s, the relative position between the article 16 and the punch 18 is known when the punch 18 reaches the object 16.
- the punch 18 can apply the label to the object 16 with a certain adapted force.
- a transducer device 80 is disposed on the punch 18 and in particular the piston rod 29, which is provided with an optical coding.
- surfaces 82, 84 of different brightness are arranged as coding fields along the stamp 18 (in the direction of displacement 20).
- the surfaces 82, 84 preferably have the same length in the displacement direction 20, d. H. the surfaces 82 are evenly spaced and the surfaces 84 are also equally spaced.
- a sensor device 86 is arranged on the holding device 12 and comprises, for example, two optical sensors 88, 90 (FIG. 9) which sit in the region between the suction plate 36 and the holding device 12 at its end facing the suction plate 36.
- a dark area 82 and a light area 84 each have an extension d in the direction of the displacement axis.
- the two sensors 88, 90 are preferably spaced parallel to the displacement direction at a distance d / 2.
- a sensor signal 92 of the sensor 90 can then be realized, which is phase-shifted by 90 ° in comparison with a sensor signal 94 of the sensor 88.
- a double resolution can be achieved in comparison with the use of only one sensor, without the surfaces 82, 84 having to be reduced in size.
- the labeling device 78 functions as described above in connection with the labeling device 10.
- FIG. 11 A third exemplary embodiment of a labeling device according to the invention is shown in FIG. 11 and designated there as a whole by 102.
- the same components as in the first embodiment are again provided with the same reference numerals.
- a distance sensor 104 is provided, which may be, for example, an optical sensor or an inductive sensor or the like. This distance sensor 104 is firmly connected to the holding device 12 and aligned with one of the holding device 12 facing back 106 of the punch 18. The distance sensor 104, for example, electromagnetically couples to this rear side 106 of the stamp 18 in order to determine the distance and, in particular, the temporal change of the distance between the holding device 12 and the stamp 18.
- the distance sensor 104 forms a sensor device.
- the transducer device can be formed on the distance sensor 104 itself, for example, by the distance sensor emits an electromagnetic signal, which is reflected by the punch 18. Die Abreteswelle 14 kann tone als Transponder oder Transponder made known secret.
- the stamp 18 can also form the encoder device itself.
- the coupling between the distance sensor 104 and punch 18 depends on the distance between them and is thus determined by the displacement of the punch 18. In the starting position 40 no change in distance occurs. The beginning of the time measurement for the stamp shift time can then be initiated by a noticeable change in distance occurring.
- the labeling device 102 functions as already described above in connection with the first and second embodiments.
- a transducer device 110 which comprises, for example, a light grid.
- This transmitter device 110 generates a light field on a sensor device 112.
- the transducer device 110 and the sensor device 112 are spaced transversely to a transport direction of the article 16.
- the object 16 is guided, for example, on a conveyor belt 114 (with a transport direction, which is perpendicular to the drawing direction in FIG. 12).
- the encoder 110 generates a light field 116 whose height extends above the height of the article 16 and at least the maximum height of the punch 18 above the conveyor belt 14.
- the punch 18 is immersed in the light field 116.
- the sensor device 110 and the sensor device 112 are designed so that the light field can be at least partially covered by the stamp 18, so that the sensor device 112 is shaded.
- the sensor device 112, which comprises a plurality of photosensitive sensors spaced apart in the displacement direction 20 of the stamp 18, can then determine the position of the ink from the degree of shading as an immersion depth into the light field 116. From the detection of a change in the degree of shading, in turn, the stamp shift time can be determined.
- the object 16 can also shade the sensor device 112, so that it can be determined according to the height parameter of the object.
- the light grid of the encoder device 110 generates parallel light beams that are transversely and in particular perpendicular to the height direction of the article 16, then a rapid and easy determination of the height of the article 16 can be carried out.
- the reaching of the object 16 by the punch 18 can then be determined in a simple manner, namely when complete shading (based on the height direction 20) of the sensor device 112 is achieved.
- the stamp shift time can then be determined in a simple and direct manner.
- the labeling device 108 functions as described above with reference to the embodiments 10, 78 and 102.
- An acceleration sensor may also be provided which responds to the impact of the punch 18 on the object 16 so as to determine the stamp displacement time.
- an acceleration sensor can also be arranged on the displaceable piston rod 29, in which case the corresponding signals of the acceleration sensor are then forwarded wirelessly to an evaluation device.
- the stamp displacement time can be determined.
Landscapes
- Labeling Devices (AREA)
Description
- Die Erfindung betrifft eine Etikettiervorrichtung für bewegte Gegenstände, mit einem Stempel, welcher verschieblich geführt ist und mittels welchem ein Etikett an einem Gegenstand positionierbar ist.
- Ferner betrifft die Erfindung ein Verfahren zur Etikettierung von bewegten Gegenständen mittels eines Stempels.
- Derartige Vorrichtungen und Verfahren sind beispielsweise aus der EP 0 846 074 B1 oder der DE 199 52 375 A1 bekannt. Aus EP 0 090 631 ist eine Etikettiervorrichtung mit einer Meßvorrichtung zur Bestimmung der Stempelverschiebungsstreckung bekannt.
- Der Erfindung liegt die Aufgabe zugrunde, eine Etikettiervorrichtung und ein Verfahren zur Etikettierung von bewegten Gegenständen bereitzustellen, bei der bzw. bei dem eine hohe Reproduzierbarkeit des Etikettierungsvorgangs an den bewegten Gegenständen erreicht ist.
- Diese Aufgabe wird bei der eingangs genannten Etikettiervorrichtung erfindungsgemäß dadurch gelöst, daß eine Meßvorrichtung zur Bestimmung einer Stempelverschiebungszeit vorgesehen ist, wobei die Stempelverschiebungszeit durch die Zeitdauer der Bewegung des Stempels auf den Gegenstand zu bestimmt ist.
- Üblicherweise wird der Stempel über Druckluftzylinder bewegt. Der genaue räumlich-zeitliche Bewegungsablauf des Stempels ist deshalb nicht bekannt. Die genaue Plazierung eines Etiketts ist dadurch bestimmt, daß der bewegte Gegenstand und der Stempel miteinander synchronisiert werden müssen. Eine wichtige Kenngröße dieser Synchronisierung ist die Etikettierzeit, nämlich die Zeit, die zur Etikettierung benötigt wird. Die Geschwindigkeit des bewegten Gegenstands und die Etikettierzeit müssen aufeinander abgestimmt sein, wenn an einer definierten Position an dem Gegenstand ein Etikett und insbesondere ein Haftetikett angebracht werden soll.
- Die Etikettierzeit wiederum setzt sich im wesentlichen zusammen aus einer bekannten Systemzeit und der Stempelverschiebungszeit, die nur ungenau abgeschätzt werden kann.
- Erfindungsgemäß ist es nun vorgesehen, daß die Stempelverschiebungszeit gemessen wird, d. h. mit der Meßvorrichtung erfaßt wird. Dadurch läßt sich die Etikettierzeit genau berechnen und damit wiederum läßt sich eine hohe Genauigkeit bei der Etikettenplazierung erreichen, wenn entsprechend die berechnete Etikettierzeit berücksichtigt wird.
- Es kann dann beispielsweise vorgesehen werden, daß die Stempelverschiebungszeit für einen bestimmten Typ von Gegenstand (beispielsweise einem bestimmten Packungstyp) einmal gemessen wird und abgespeichert wird. Der Gegenstand kann dabei relativ zu einer Haltevorrichtung des Stempels ruhen.
- Wird dann während eines Auszeichnungsvorgangs an den bewegten Gegenständen die Stempelverschiebungszeit kontinuierlich gemessen, dann kann eine Anpassung an sich ändernde Gegebenheiten wie eine Veränderung der Stempelbewegung durch Temperaturänderungen oder langsam variierende Änderungen in der Höhe des Gegenstands berücksichtigt werden, indem entsprechend ein modifizierter Wert für die Stempelverschiebungszeit abgespeichert wird.
- Es kann auch vorgesehen sein, daß nach Wartungsarbeiten oder Reparaturarbeiten an der Etikettiervorrichtung die Stempelverschiebungszeit neu gemessen wird.
- Wenn Gegenstände unterschiedlicher Höhe in nicht vorhersehbarer Reihenfolge zugeführt werden, so kann bei Berücksichtigung der Höhe der Gegenstände die Stempelverschiebungszeit für die jeweiligen Gegenstände ermittelt werden und dann bei zukünftigen Etikettierungsvorrichtungen berücksichtigt werden.
- Durch die erfindungsgemäße Vorrichtung haben sich auch bei Streuungen in der Höhe der Gegenstände bei beliebigen Zuführungsgeschwindigkeiteh der Gegenstände Etikettablagen an den Gegenständen an gleicher Position mit hoher Genauigkeit erreichen lassen.
- Es ist auch möglich, unter Kenntnis der gemessenen Stempelverschiebungszeit die Auftreffenergie des Stempels auf den Gegenstand einzustellen. Ferner ist es möglich, über die Kenntnis der gemessenen Stempelverschiebungszeit die Bewegung des Stempels derart zu steuern, daß dieser nicht zu lange auf dem Gegenstand aufsitzt.
- Insbesondere ist die Stempelverschiebungszeit bestimmt durch das Zeitintervall der Verschiebung des Stempels aus einer Ausgangsstellung bis zum Erreichen des Gegenstands. Durch die erfindungsgemäße Meßvorrichtung läßt sich diese Stempelverschiebungszeit messen, d. h. mit hoher Genauigkeit ermitteln, ohne daß die Bewegungsgleichungen der Stempelverschiebung bekannt sein müssen. Die Ausgangsstellung ist dabei insbesondere eine Stellung, in welcher der Stempel ein Etikett aufnimmt oder eine Zwischenstellung, wobei die Zeitdauer bekannt ist, die der Stempel aus der Aufnahmestellung bis zum Erreichen der Zwischenstellung benötigt.
- Eine Etikettierzeit ist bestimmt durch die Summe einer Systemzeit und der Stempelverschiebungszeit. Die Systemzeit, welche sich zusammensetzt beispielsweise aus systembedingten Wartezeiten, einer Übergabezeit für Etiketten an den Stempel und einer Drehzeit, ist systemabhängig und grundsätzlich bekannt. Die unbekannte Größe in der Etikettierzeit, nämlich die Stempelverschiebungszeit, wird erfindungsgemäß gemessen. Für die Synchronisierung zwischen dem bewegten, zu etikettierenden Gegenstand und dem Stempel wiederum ist die Etikettierzeit maßgebend, damit rechtzeitig ein Etikettiervorgang gestartet werden kann, wenn ein Etikett an einer bestimmten Stelle des Gegenstands positioniert werden soll. Da erfindungsgemäß die Stempelverschiebungszeit gemessen wird, läßt sich so die Etikettierzeit explizit bestimmen. Insbesondere ist durch die Meßvorrichtung die Stempelverschiebungszeit kontinuierlich meßbar, so daß auch Änderungen in der Stempelverschiebung, wie sie beispielsweise durch Temperaturänderungen oder durch langsam variierende Höhenänderungen bei den zu etikettierenden Gegenständen verursacht sind, berücksichtigbar sind.
- Weiterhin ist es durch die erfindungsgemäße Lösung möglich, die Stempelverschiebungszeit nach Veränderungen im mechanischen System wie beispielsweise nach Wartungsarbeiten, Reparaturarbeiten oder einem Kolbenaustausch auf einfache Weise neu zu ermitteln, so daß eine sichere Etikettierungsfunktion gewährleistet ist.
- Insbesondere ist es vorgesehen, daß die Meßvorrichtung die Stempelverschiebungszeit berührungslos ermittelt, um so den Verschleiß und den Wartungsaufwand gering zu halten.
- Günstig ist es, wenn die Meßvorrichtung eine Sensoreinrichtung und eine Gebereinrichtung umfaßt, um eine hohe Genauigkeit bei der Messung der Stempelverschiebungszeit zu erreichen. Durch die Sensoreinrichtung bzw. Gebereinrichtung läßt sich dann ein Meßbereich definieren, welcher insbesondere die mögliche lineare Bewegungsstrecke des Stempels umfaßt.
- Bei einer Variante einer Ausführungsform sind dabei die Sensoreinrichtung und die Gebereinrichtung relativ zueinander verschieblich, um so eine Zeiterfassung durchführen zu können.
- Insbesondere ist es vorgesehen, daß die Sensoreinrichtung oder Gebereinrichtung ortsfest bezüglich einer Haltevorrichtung einer Stempelführung angeordnet ist und die Gebereinrichtung oder Sensoreinrichtung mit dem Stempel verschieblich ist. Dadurch läßt sich bestimmen, ob der Stempel sich noch bewegt oder ob er angehalten ist. Dadurch wiederum läßt sich die Stempelverschiebungszeit als das Zeitintervall zwischen einer Ausgangsstellung des Stempels und dem Erreichen des Gegenstands bestimmen.
- Beispielsweise ermittelt die Meßvorrichtung die Stempelverschiebungszeit über magnetische Kopplung zwischen Sensoreinrichtung und Gebereinrichtung.
- Beispielsweise umfaßt dann die Gebereinrichtung einen Magneten und die Sensoreinrichtung eine Mehrzahl von Hall-Sensoren, welche berührungslos an den Magneten koppeln. Insbesondere sind mehr als zwei Hall-Sensoren vorgesehen, welche längs der möglichen Bewegungsstrecke des Stempels angeordnet sind.
- Günstig ist es, wenn die Hall-Sensoren in mindestens einer Reihe angeordnet sind. Die Hall-Sensoren sind dann in einer Reihe insbesondere im wesentlichen parallel zu einer Verschiebungsrichtung des Stempels ausgerichtet angeordnet. Über die Ausdehnung der Reihe läßt sich ein Meßbereich definieren. Über die Anzahl der Sensoren in einer Reihe und/oder über die Anzahl der Reihen läßt sich eine Meßauflösung einstellen.
- Bei einer Ausführungsform der Erfindung ist eine Auswerteeinrichtung der Meßvorrichtung so beschaltet, daß Signale jedes einzelnen Hall-Sensors auswertbar sind. Wenn dann der Stempel mit der Gebereinrichtung (insbesondere ein Magnet) längs der Reihe fährt und dann die Hall-Sensoren der Reihe nach ein Schaltsignal liefern, dann läßt sich auf einfache und genaue Weise die Stempelverschiebungszeit ermitteln.
- Es ist dann günstig, wenn die Hall-Sensoren so angeordnet sind, daß bei der Bewegung des Stempels stets mindestens ein Hall-Sensor ein Schaltsignal liefert. Dadurch kann auf sichere Weise festgestellt werden, ob sich der Stempel noch bewegt oder ruht.
- Insbesondere sind die Hall-Sensoren so angeordnet und beschaltet, daß benachbarten Hall-Sensoren zugeordnete Signale zeitlich überlappen. Dies kann beispielsweise über einen Monoflop bewirkt werden. Durch die zeitliche Überlappung läßt sich eine Auswertung realisieren, mittels der auf einfache Weise ein Ruhen des Stempels erkennbar ist.
- Insbesondere ist dann ein Zeitermittlungssignal gebildet, welches während der Bewegung des Stempels im gleichen Schaltzustand bleibt. Das Zeitermittlungssignal (Interrupt-Signal) wird dann vorzugsweise in diesen Schaltzustand versetzt, wenn der erste Hall-Sensor der Sensoreinrichtung ein Schaltsignal liefert und bleibt in diesem Schaltzustand, bis die Sensoreinrichtung keine Bewegung des Stempels mehr detektiert. Die Länge des Zeitermittlungssignals ist dann ein Maß für die Stempelverschiebungszeit.
- Es kann auch eine Mehrzahl von Reihen von Hall-Sensoren vorgesehen sein, wobei die Hall-Sensoren so angeordnet und beschaltet sind, daß in unterschiedlichen Reihen phasenverschobene Schaltsignale generierbar sind. Insbesondere sind dabei die Hall-Sensoren einer Reihe gemeinsam geschaltet, d. h. eine Reihe weist einen Ausgangsanschluß auf, welcher der Gesamtheit der Hall-Sensoren der Reihe zugeordnet ist. Über solche Reihen, welche bezüglich benachbarter Reihen phasenverschobene Signale erzeugen, läßt sich eine hohe Auflösung erreichen.
- Es kann auch vorgesehen sein, daß Sensoreinrichtung und Gebereinrichtung optisch miteinander gekoppelt sind.
- Bei einem Ausführungsbeispiel ist die Gebereinrichtung mit einer längs der Bewegungsrichtung des Stempels ausgerichteten Codierung versehen, welche durch die Sensoreinrichtung auslesbar ist.
- Die Codierung ist dabei vorzugsweise ortsfest bezüglich des Stempels angeordnet, um so eine Bewegung des Stempels erfassen zu können.
- Günstigerweise weist die Codierung Codierungsfelder auf, welche gleichmäßig beabstandet sind. Die Codierungsfelder sind beispielsweise durch Hell-Dunkel-Kontraste gebildet. Die Sensoreinrichtung umfaßt dann optische Sensoren, welche auf solche Hell-Dunkel-Kontraste reagieren. Es läßt sich dann auf einfache Weise eine Bewegung oder ein Ruhen des Stempels detektieren, wenn eben die Sensoreinrichtung eine Kontraständerung detektiert bzw. keine Kontraständerung mehr detektiert.
- Günstig ist es, wenn die Sensoreinrichtung zwei optische Sensoren umfaßt, welche im wesentlichen im halben Abstand der Codierungsfelder angeordnet sind. Es läßt sich dann eine höhere Auflösung unter geringem Aufwand erreichen.
- Es kann auch vorgesehen sein, daß die Gebereinrichtung einen Generator für ein Lichtfeld wie beispielsweise ein Lichtgitter umfaßt, wobei der Stempel in das Lichtfeld eintauchbar ist und das Lichtfeld durch den Stempel in Abhängigkeit von der Eintauchtiefe bezogen auf eine Sensoreinrichtung zumindest teilweise abschirmbar ist. Die Eintauchtiefe läßt sich dadurch bestimmen und damit wiederum läßt sich die Stempelverschiebungszeit ermitteln. Durch ein solches Lichtfeld läßt sich auch die Höhe des Gegenstands, welcher zu etikettieren ist, ermitteln, wenn der Gegenstand in das Lichtfeld eintaucht. Insbesondere läßt sich dann auf einfache Weise bestimmen, wann der Stempel den Gegenstand erreicht hat; dies ist dann der Fall, wenn Stempel und Gegenstand das Lichtfeld maximal abschirmen.
- Durch die Sensoreinrichtung ist dann die Abschirmung durch den Stempel zeitlich bestimmbar.
- Es kann auch ein Abstandssensor vorgesehen sein, welcher den Abstand des Stempels zu einer Haltevorrichtung des Stempels mißt. Diese Abstandsmessung erfolgt dabei insbesondere optisch. Sie kann aber auch induktiv erfolgen. Aus einer Änderung dieses Abstands läßt sich ermitteln, ob sich der Stempel noch bewegt bzw. ruht.
- Die eingangs genannte Aufgabe wird bei einem Verfahren zur Etikettierung von bewegten Gegenständen mittels eines Stempels erfindungsgemäß dadurch gelöst, daß eine Stempelverschiebungszeit als Zeitdauer der Stempelbewegung von einer Ausgangsstellung bis zum Erreichen des Gegenstands gemessen wird.
- Die Vorteile des erfindungsgemäßen Verfahrens wurden bereits im Zusammenhang mit der erfindungsgemäßen Etikettiervorrichtung erläutert.
- Weitere vorteilhafte Ausführungsformen wurden ebenfalls bereits im Zusammenhang mit der erfindungsgemäßen Etikettiervorrichtung erläutert.
- Insbesondere ist dabei die Etikettierzeit, welche die Bewegung zwischen dem bewegten zu etikettierenden Gegenstand und dem Stempel bestimmt und damit die Positionierung der Etiketten an dem Gegenstand, ermittelt als Summe einer Systemzeit, die grundsätzlich bekannt ist, und der gemessenen Stempelverschiebungszeit.
- Die ermittelte Stempelverschiebungszeit wird abgespeichert und kann dann für zukünftige Etikettierungsvorgänge, d. h. für die nächsten Gegenstände, verwendet werden.
- Es kann vorgesehen sein, daß die gespeicherte Stempelverschiebungszeit zur Synchronisierung des Stempels und der zu etikettierenden Gegenstände verwendet wird. Es ist ferner günstig, wenn die Stempelverschiebungszeit kontinuierlich gemessen wird. Es können dann auch Änderungen in der Stempelverschiebung berücksichtigt werden, wie sie beispielsweise durch langsam variierende Änderungen in der Gegenstandshöhe oder durch Temperaturänderungen verursacht werden.
- Insbesondere wird die gemessene Stempelverschiebungszeit dazu verwendet, das Auftreffen des Stempels auf den Gegenstand einzustellen. Ferner kann die ermittelte Stempelverschiebungszeit dazu verwendet werden, die Aufsetzdauer des Stempels auf den Gegenstand gering zu halten.
- Die nachfolgende Beschreibung bevorzugter Ausführungsformen dient im Zusammenhang mit der Zeichnung der näheren Erläuterung der Erfindung. Es zeigen:
- Figur 1
- eine schematische Ansicht eines ersten Ausführungsbeispiels einer erfindungsgemäßen Etikettiervorrichtung;
- Figur 2
- eine Draufsicht auf die Sensoreinrichtung gemäß Figur 1 in der Richtung D;
- Figur 3
- eine schematische Darstellung der Beschaltung einer Auswerteeinrichtung der Sensoreinrichtung gemäß Figur 2;
- Figur 4
- den zeitlichen Signalverlauf an der Sensoreinrichtung gemäß Figur 2;
- Figur 5
- eine Variante einer Sensoreinrichtung;
- Figur 6
- die Beschaltung der Sensoreinrichtung gemäß Figur 5;
- Figur 7
- den Signalverlauf bei der Sensoreinrichtung gemäß Figur 5;
- Figur 8
- eine schematische Darstellung eines zweiten Ausführungsbeispiels einer erfindungsgemäßen Etikettiervorrichtung;
- Figur 9
- eine vergrößerte Darstellung des Bereichs X gemäß Figur 8;
- Figur 10
- den Signalverlauf der Sensoreinrichtung gemäß Figur 8, 9;
- Figur 11
- ein drittes Ausführungsbeispiel einer erfindungsgemäßen Etikettiervorrichtung und
- Figur 12
- ein viertes Ausführungsbeispiel einer erfindungsgemäßen Etikettiervorrichtung.
- Ein erstes Ausführungsbeispiel einer erfindungsgemäßen Etikettiervorrichtung, welche in Figur 1 dargestellt und als Ganzes mit 10 bezeichnet ist, umfaßt eine Haltevorrichtung 12, welche ortsfest positionierbar ist. Dadurch läßt sich eine als Ganzes mit 14 bezeichnete Stempelvorrichtung bezüglich einer Transporteinrichtung für bewegte Gegenstände 16 positionieren. Die Transporteinrichtung (in der Zeichnung nicht gezeigt) umfaßt beispielsweise ein Förderband, auf dem die bewegten Gegenstände 16 an der Stempelvorrichtung 14 vorbeigeführt sind.
- Die Stempelvorrichtung 14 umfaßt einen Stempel 18, welcher in einer Verschiebungsrichtung 20 beweglich ist. Die Verschiebungsrichtung 20 liegt dabei quer und insbesondere senkrecht zu einer Transportrichtung 22 für die bewegten Gegenstände 16. Mittels des Stempels 18 sind Etiketten auf einer Oberfläche 24 der bewegten Gegenstände 16 positionierbar. Bei den Gegenständen 16 handelt es sich insbesondere um Warenverpackungen.
- Zur Bewegung des Stempels 18 umfaßt die Stempelvorrichtung 14 einen Zylinder 26, in dem ein Kolben 28 verschieblich ist. Über eine Kolbenstange 29 ist der Kolben 28 mit dem Stempel 18 verbunden. In dem Zylinder 26 ist eine erste Druckkammer 30 gebildet, welche durch das eine Ende des Kolbens 28 begrenzt ist, und eine zweite Druckkammer 32 gebildet, welche durch das andere Ende des Kolbens 28 begrenzt ist.
- Die beiden Druckkammern 30, 32 sind jeweils mit Anschlüssen versehen, um in diesen einen Überdruck bzw. Unterdruck erzeugen zu können. Wird beispielsweise in der ersten Druckkammer 30 ein Überdruck erzeugt und in der zweiten Druckkammer 32 ein Unterdruck, dann wird dadurch der Stempel 18 auf den Gegenstand 16 zu bewegt. Wird in der zweiten Druckkammer 32 ein Überdruck erzeugt und in der ersten Druckkammer 30 ein Unterdruck erzeugt, dann wird der Stempel 18 von dem Gegenstand weg bewegt. Durch alternierende Erzeugung von Überdruck und Unterdruck in den Druckkammern 30 und 32 läßt sich eine Auf- und Abbewegung des Stempels 18 erreichen und damit eine periodische Positionierung von Etiketten auf bewegten Gegenständen 16.
- In einem Bewegungsbereich 34 des Stempels 18 zwischen der Haltevorrichtung 12 und den bewegten Gegenständen 16 ist eine Ansaugplatte 36 angeordnet, an welcher der Stempel 18 ein Etikett zur Ablage auf dem Gegenstand 16 aufnimmt. Durch die Ansaugplatte 36 ist dann eine Ausgangsstellung des Stempels 18 definiert, so daß der Stempel 18 eine definierte Ausgangsposition aufweist, aus der er Etiketten aufnehmen kann, um sie dann nach der Zubewegung auf die bewegten Gegenstände 16 auf diesen positionieren zu können. Diese Ausgangsstellung 40 liegt unterhalb einer Anschlagposition des Kolbens 28 im Zylinder 26.
- Nach Aufnahme des Etiketts durch den Stempel 18 kann eine Drehung des Stempels 18 vorgesehen sein, um das Etikett relativ zu dem Gegenstand 16 zu positionieren.
- Durch eine Stempelführung 38 des Stempels 18 wird erreicht, daß der Stempel 18 nach einer eventuellen Drehbewegung beim weiteren Ausfahren im wesentlichen nur eine Linearbewegung zwischen seiner Ausgangsstellung 40 und der Stellung, bei welcher der zu etikettierende Gegenstand 16 erreicht ist, durchgeführt wird.
- Die Etikettierzeit TE, die zur Etikettierung eines bewegten Gegenstands 16 benötigt wird, setzt sich aus einer Systemzeit Tsys und einer Stempelverschiebungszeit TS zusammen. Die Systemzeit Tsys ist bedingt durch bekannte systembedingte Wartezeiten und bekannte Zeiten, welche bestimmt sind durch die Aufnahme von Etiketten durch den Stempel 18 und dessen Positionierung hierzu in der Ausgangsstellung 40 (umfassend beispielsweise eine Drehzeit zur Drehung des Stempels 18).
- Die Stempelverschiebungszeit TS ist diejenige Zeit, die der Stempel 18 von seiner Ausgangsstellung 40 bei einem Ausfahrvorgang bis zum Erreichen des Gegenstands 16 benötigt. In dem gezeigten Ausführungsbeispiel ist die Ausgangsstellung 40 die Stellung des Stempels 18, in der dieser ein Etikett aufnimmt. Die Ausgangsstellung kann aber auch eine Zwischenstellung sein, wobei die Zeitdauer der Stempelbewegung von einer Aufnahmestellung zu der Zwischenstellung bekannt ist (als Teil von Tsys). Diese Stempelverschiebungszeit TS ist grundsätzlich unbekannt; da die Bewegungsgleichungen der Verschiebung des Stempels 18 nicht bekannt sind, läßt sich diese nicht rechnerisch ermitteln. Erfindungsgemäß wird sie beispielsweise bei einem ruhenden Gegenstand 16 gemessen. Während eines Auszeichnungsvorgangs der Gegenstände 16 kann sich die Stempelverschiebungszeit ändern, da sich die Stempelverschiebung beispielsweise aufgrund Temperaturänderungen ändern kann oder beispielsweise aufgrund von Reaktionen in der Höhe der Gegenstände 16, wobei es sich dann um kleine bzw. langsame Änderungen in der Gegenstandshöhe handelt.
- Wenn Gegenstände 16 unterschiedliche Höhen aufweisen, dann gilt grundsätzlich für jeden Gegenstand einer bestimmten Höhe eine eigene Stempelverschiebungszeit.
- Erfindungsgemäß ist nun eine Meßvorrichtung 42 zur Bestimmung der Stempelverschiebungszeit TS vorgesehen. Durch diese Meßvorrichtung 42 läßt sich die Stempelverschiebungszeit TS kontinuierlich erfassen. Sie kann für einen bestimmten Gegenstandstyp 16 ermittelt und abgespeichert werden. Während eines Auszeichnungsvorgangs an einer Mehrzahl von beweglichen Gegenständen 16 kann die Stempelverschiebungszeit TS an sich ändernde Bedingungen wie Temperaturänderungen oder kleine Variationen in der Gegenstandshöhe angepaßt werden und der gespeicherte Wert korrigiert werden, beispielsweise als zuletzt gültiger Mittelwert.
- Bei einem ersten Ausführungsbeispiel einer erfindungsgemäßen Meßvorrichtung 42 ist eine Sensoreinrichtung 44 vorgesehen (Figuren 1 bis 4), welche eine Mehrzahl von Hall-Sensoren 46 umfaßt, die auf einer Platine 48 angeordnet sind (Figur 2). Die Hall-Sensoren sind in einer oder, wie in Figur 2 gezeigt, in zwei Reihen 50, 52 angeordnet. In diesen Reihen 50, 52 sind die Hall-Sensoren 46 jeweils parallel zu der Verschiebungsrichtung 20 ausgerichtet, wobei die Hall-Sensoren der beiden Reihen 50, 52 relativ zueinander versetzt angeordnet sind, d. h. zwischen benachbarten Hall-Sensoren der Reihe 52 sitzt jeweils quer zur Verschiebungsrichtung 20 beabstandet ein Hall-Sensor der Reihe 50, um eine große Anzahl von Hall-Sensoren H1 bis Hn auf der Platine 48 unterbringen zu können.
- Die Sensoreinrichtung 44 ist dabei an der Haltevorrichtung 12 angeordnet.
- An dem Kolben 28 ist als Gebereinrichtung ein Permanentmagnet 54 angeordnet, welcher mit dem Kolben 28 in dem Zylinder 26 verschieblich ist.
- Wenn der Stempel 18 aus seiner Ausgangsstellung 40 (seiner Ausfahrstellung) sich in der Verschiebungsrichtung 20 auf den Gegenstand 16 zu bewegt, dann fährt der Magnet 54 längs der Reihen 50, 52 der Hall-Sensoren 46 entlang und erzeugt durch die magnetische Kopplung an diese an den jeweiligen Sensoren ein entsprechendes Signal.
- Es sind dabei so viele Hall-Sensoren Hn vorgesehen, daß auch in der tiefsten Position des Stempels 18 (bei Gegenständen mit der kleinsten Höhe) noch ein Signal der Sensoreinrichtung 44 generierbar ist, welche das Erreichen des Gegenstands 16 anzeigt.
- Bei dem Permanentmagneten 54 handelt es sich beispielsweise um einen axial magnetisierten Scheibenmagnet. Bei den Hall-Sensoren 46 (H1 bis Hn) kann es sich um bipolare Sensoren handeln, die unabhängig davon schalten, in welcher Richtung das Magnetfeld auf sie trifft oder um unipolare Sensoren, die nur dann schalten, wenn das Magnetfeld in einer bestimmten Richtung auf sie trifft. Unipolare Sensoren können dichter zueinander angeordnet werden und man erreicht somit eine höhere Auflösung.
- Auf der Platine 48 ist eine Auswerteeinrichtung 56 angeordnet, welche die Signale der Hall-Sensoren H1 bis Hn auswertet, um so die Stempelverschiebungszeit TS zu ermitteln.
- Bei einer ersten Ausführungsform einer Beschaltung, welche schematisch in Figur 3 gezeigt ist, ist jeder Hall-Sensor H1 bis Hn mit der Auswerteeinrichtung 56 verbunden, so daß diese die Schaltsignale der individuellen Hall-Sensoren 46 empfangen kann.
- Die Auswerteeinrichtung 56 ist über eine Freigabesignalleitung 58 mit einem Mikrocontroller verbunden, welcher dann entsprechend die Auswerteeinrichtung aktivieren kann.
- Bewegt sich nun der Magnet 54 entlang der Hall-Sensoren 46, so erzeugt der jeweils beaufschlagte Hall-Sensor ein Schaltsignal, welches der Auswerteeinrichtung 56 zugeführt wird.
- Es kann vorgesehen sein, daß mit einer fallenden Flanke 60 (Figur 4) des ersten Hall-Sensors H1, welcher am weitesten entfernt von der Ansaugplatte 36 angeordnet ist, ein retriggerbares Monoflop getriggert wird. Während einer Meßperiode zur Bestimmung der Stempelverschiebungszeit TS triggert dabei die fallende Flanke eines bestimmten Hall-Sensors 46 das Monoflop nur einmal. Jede weitere fallende Flanke der Schaltsignale der Hall-Sensoren H2 bis Hn triggert das Monoflop erneut.
- Wenn der Stempel 18 durch Erreichen des Gegenstands 16 zur Ruhe kommt, dann kippt das Monoflop in seinen stabilen Zustand und löst über eine Interrupt-Leitung 62 einen Interrupt aus. Die Zeitdauer für die Auslösung des Interrupts ist ein Maß für die Stempelverschiebungszeit TS.
- Die Hall-Sensoren 46 sind so dicht positioniert, daß der Interrupt erst ausgelöst wird, wenn der Stempel 18 ruht.
- Es kann sein, daß die Messung ungenau ist um eine Rückfallzeit TM des Monoflops (Figur 4). Es ist dabei möglich, über Steuerleitungen 64, 66 die Rückfallzeit TM einzustellen und insbesondere zu steuern. Es ist auch möglich, daß die Auswerteeinrichtung 56 die Rückfallzeit TM selber bestimmt und sich insbesondere dazu an der zuletzt gemessenen Zeit zwischen zwei Schaltflanken benachbarter Hall-Sensoren Hi und HI-1 orientiert.
- Bei einer Variante dieser Ausführungsform sind, wie in Figur 5 gezeigt, die Hall-Sensoren 46 in versetzten Reihen A und B angeordnet, wobei die Hall-Sensoren der jeweiligen Reihen A und B miteinander beschaltet und mit einer Auswerteeinrichtung 68 verbunden sind. Es sind dabei Ausgangsanschlüsse der Hall-Sensoren jeweils Gruppe A und der Gruppe B zusammengefaßt und mit der Auswerteeinrichtung 68 verbunden. Zwischen einer Versorgungsspannungsschiene und einem Masse-Anschluß der Hall-Sensoren 46 ist ein Kondensator 70 zur Entpufferung angeschlossen (Figur 6). Die Versorgungsspannung wird über einen Widerstand 72 den Hall-Sensoren 46 zugeführt.
- Die Hall-Sensoren der benachbarten Reihen A und B sind so beschaltet und angeordnet, daß entsprechende Schaltsignale 74, 76 eine Phasenverschiebung von beispielsweise 90° aufweisen, wie in Figur 7 gezeigt. Bewegt sich dann der Magnet 54, bei dem es sich insbesondere um einen radial magnetisierten Magneten handelt, längs der Platine mit den Hall-Sensoren 46, welche in den Reihen A und B angeordnet sind, dann entsteht für die Sensoren der Reihe A ein periodisches Signal 74 und für die Sensoren der Reihe B ein phasenverschobenes periodisches Signal 76. Durch die Auswerteeinrichtung 68 läßt sich über Summenbildung und/oder Differenzbildung die Anzahl der Signaländerungen im Summensignal und/oder Differenzsignal auswerten. Es läßt sich dann daraus wiederum die Stempelverschiebungszeit TS bestimmen. Außerdem läßt sich die Bewegungsrichtung des Stempels 18 ermitteln. Dadurch kann das Auftreffen des Stempels 18 auf den Gegenstand 16 auch über ein Zurückprellen des Stempels 18 ermittelt werden.
- Erfindungsgemäß wird also wie folgt vorgegangen:
- Die Stempelverschiebungszeit TS wird als Zeitdauer der Stempelbewegung von der Ausgangsstellung 40 bis zum Erreichen des Gegenstands 16 gemessen und gespeichert. Bei der Berechnung der Etikettierzeit TE wird dann diese Stempelverschiebungszeit TS berücksichtigt.
- Die Stempelverschiebungszeit wird beispielsweise für einen bestimmten Gegenstandstyp ermittelt und abgespeichert. Bei kontinuierlicher Messung der Stempelverschiebungszeit in Verbindung beispielsweise mit einer Mittelwertbildung kann dann der Etikettiervorgang an sich ändernde Gegebenheiten wie beispielsweise Veränderung der Stempelbewegung durch Temperaturänderungen oder langsame Änderungen in der Gegenstandshöhe angepaßt werden. Der zuletzt gültige Wert wird beispielsweise als Mittelwert abgespeichert und kann dann bei einem erneuten Etikettiervorgang für eben diesen Gegenstand als Startwert herangezogen werden.
- Bei Gegenständen unterschiedlicher Höhe, welche in nicht vorhersehbarer Reihenfolge zugeführt werden, kann bei Berücksichtigung der Höhe dieser Gegenstände die Stempelverschiebungszeit für die jeweilige Gegenstandshöhe ermittelt werden und bei zukünftigen Etikettiervorgängen berücksichtigt werden.
- Durch die erfindungsgemäße Vorgehensweise ist für einen bestimmten Gegenstandstyp die Etikettierzeit TE bekannt, da die Stempelverschiebungszeit TS gemessen wurde. Damit läßt sich sicherstellen, daß Etiketten mit hoher Genauigkeit an den bewegten Gegenständen 16 plaziert werden, da sich ein Gegenstand 16, welcher sich mit der Geschwindigkeit V bewegt, während der Etikettierzeit um die Strecke V x TE bewegt und damit eben bei Kenntnis der Stempelverschiebungszeit TS die Relativposition zwischen dem Gegenstand 16 und dem Stempel 18 bekannt ist, wenn der Stempel 18 den Gegenstand 16 erreicht.
- Über Kenntnis der Stempelverschiebungszeit läßt sich auch einstellen, daß der Stempel 18 das Etikett mit einer bestimmten angepaßten Kraft auf den Gegenstand 16 aufbringen kann.
- Bei einem zweiten Ausführungsbeispiel einer erfindungsgemäßen Etikettiervorrichtung, welche in Figur 8 schematisch gezeigt ist und dort als Ganzes mit 78 bezeichnet ist, ist die Stempelvorrichtung grundsätzlich gleich ausgebildet wie oben beschrieben. Gleiche Teile werden deshalb mit gleichen Bezugszeichen versehen.
- Bei diesem Ausführungsbeispiel ist an dem Stempel 18 und insbesondere der Kolbenstange 29 eine Gebereinrichtung 80 angeordnet, welche mit einer optischen Codierung versehen ist. Dazu sind längs des Stempels 18 (in Verschiebungsrichtung 20) alternierend Flächen 82, 84 unterschiedlicher Helligkeit als Codierfelder angeordnet. Die Flächen 82, 84 weisen dabei bevorzugterweise die gleiche Länge in der Verschiebungsrichtung 20 auf, d. h. die Flächen 82 sind gleichmäßig beabstandet und die Flächen 84 sind ebenfalls gleichmäßig beabstandet.
- Eine Sensoreinrichtung 86 ist an der Haltevorrichtung 12 angeordnet und umfaßt beispielsweise zwei optische Sensoren 88, 90 (Figur 9), welche in dem Bereich zwischen der Ansaugplatte 36 und der Haltevorrichtung 12 an ihrem der Ansaugplatte 36 zugewandten Ende sitzen.
- Bewegt sich der Stempel 18, dann bewegt sich mit diesem die Gebereinrichtung 80 und damit die Flächen 82 und 84. Diese Flächen 82, 84 fahren dann an den Sensoren 88, 90 vorbei, wobei sich dann ein Signal ergibt, über welches die Stempelverschiebungszeit TS ermittelbar ist. Detektieren die Sensoren 88, 90 keine Helligkeitsänderungen mehr, dann bedeutet dies, daß der Stempel 18 den Gegenstand erreicht hat. Ausgehend von der Ausgangsstellung 40 läßt sich der Abfolge von Hell-Dunkel-Kontrasten dann die Stempelverschiebungszeit ermitteln.
- Eine dunkle Fläche 82 und eine helle Fläche 84 weisen jeweils eine Ausdehnung d in Richtung der Verschiebungsachse auf. Die beiden Sensoren 88, 90 sind vorzugsweise parallel zur Verschiebungsrichtung beabstandet mit einem Abstand d/2.
- Es läßt sich dann während der Bewegung des Stempels, wie in Figur 10 gezeigt, ein Sensorsignal 92 des Sensors 90 realisieren, welches im Vergleich mit einem Sensorsignal 94 des Sensors 88 um 90° phasenverschoben ist. Dadurch läßt sich im Vergleich zu der Verwendung von nur einem Sensor eine doppelte Auflösung erreichen, ohne daß die Flächen 82, 84 verkleinert werden müssen.
- Ansonsten funktioniert die Etikettiervorrichtung 78 so wie oben im Zusammenhang mit der Etikettiervorrichtung 10 beschrieben.
- Ein drittes Ausführungsbeispiel einer erfindungsgemäßen Etikettiervorrichtung ist in Figur 11 gezeigt und dort als Ganzes mit 102 bezeichnet. Gleiche Bauteile wie bei dem ersten Ausführungsbeispiel werden wiederum mit gleichen Bezugszeichen versehen.
- Bei diesem Ausführungsbeispiel ist ein Abstandssensor 104 vorgesehen, bei welchem es sich beispielsweise um einen optischen Sensor oder einen induktiven Sensor oder dergleichen handeln kann. Dieser Abstandssensor 104 ist fest mit der Haltevorrichtung 12 verbunden und auf eine der Haltevorrichtung 12 zugewandte Rückseite 106 des Stempels 18 ausgerichtet. Der Abstandssensor 104 koppelt an diese Rückseite 106 des Stempels 18 beispielsweise elektromagnetisch, um den Abstand und insbesondere die zeitliche Änderung des Abstands zwischen der Haltevorrichtung 12 und dem Stempel 18 zu ermitteln.
- Der Abstandssensor 104 bildet eine Sensoreinrichtung. Die Gebereinrichtung kann an dem Abstandssensor 104 selber gebildet sein, indem beispielsweise der Abstandssensor ein elektromagnetisches Signal aussendet, welches von dem Stempel 18 reflektiert wird. Der Stempel 18 kann aber auch selber die Gebereinrichtung bilden.
- Die Kopplung zwischen Abstandssensor 104 und Stempel 18 hängt ab von dem Abstand zwischen diesen und ist damit durch die Verschiebung des Stempels 18 bestimmt. In der Ausgangsstellung 40 tritt keine Abstandsänderung auf. Der Beginn der Zeitmessung für die Stempelverschiebungszeit läßt sich dann dadurch initiieren, daß eine merkliche Abstandsänderung auftritt.
- Ist dann der Gegenstand 16 erreicht, dann tritt ebenfalls keine Abstandsänderung mehr auf, so daß hierüber die Endzeit zur Bestimmung der Stempelverschiebungszeit ermittelbar ist. Die entsprechende Zeitdifferenz stellt dann eben die Stempelverschiebungszeit dar.
- Ansonsten funktioniert die Etikettiervorrichtung 102 wie bereits oben im Zusammenhang mit dem ersten und zweiten Ausführungsbeispiel beschrieben.
- Bei einem vierten Ausführungsbeispiel, welches schematisch in Figur 12 gezeigt und dort als Ganzes mit 108 bezeichnet ist, ist eine Gebereinrichtung 110 vorgesehen, welche beispielsweise ein Lichtgitter umfaßt. Diese Gebereinrichtung 110 erzeugt ein Lichtfeld auf eine Sensoreinrichtung 112 zu. Die Gebereinrichtung 110 und die Sensoreinrichtung 112 sind dabei quer zu einer Transportrichtung des Gegenstands 16 beabstandet. Der Gegenstand 16 ist beispielsweise auf einem Transportband 114 geführt (mit einer Transportrichtung, welche in Figur 12 senkrecht zur Zeichenrichtung steht).
- Die Gebereinrichtung 110 erzeugt ein Lichtfeld 116, dessen Höhe sich über die Höhe des Gegenstands 16 und mindestens die maximale Höhe des Stempels 18 über dem Transportband 14 erstreckt. Der Stempel 18 ist in das Lichtfeld 116 eintauchbar.
- Die Gebereinrichtung 110 und die Sensoreinrichtung 112 sind so ausgebildet, daß durch den Stempel 18 das Lichtfeld mindestens teilweise abdeckbar ist, so daß die Sensoreinrichtung 112 beschattet wird. Die Sensoreinrichtung 112, welche eine Mehrzahl von in der Verschiebungsrichtung 20 des Stempels 18 beabstandete lichtempfindliche Sensoren umfaßt, kann dann aus dem Beschattungsgrad die Stempelstellung als Eintauchtiefe in das Lichtfeld 116 ermitteln. Aus der Detektion einer Veränderung des Beschattungsgrades läßt sich dann wiederum die Stempelverschiebungszeit ermitteln.
- Es ist auch möglich, über das Lichtfeld 116 die Höhe des Gegenstands in der Verschiebungsrichtung 20 zu ermitteln. Auch der Gegenstand 16 kann die Sensoreinrichtung 112 beschatten, so daß hierüber eben entsprechend der Höhenparameter des Gegenstands ermittelbar ist. Insbesondere wenn das Lichtgitter der Gebereinrichtung 110 parallele Lichtstrahlen erzeugt, die quer und insbesondere senkrecht zur Höhenrichtung des Gegenstands 16 liegen, dann kann eine schnelle und einfache Ermittlung der Höhe des Gegenstands 16 erfolgen.
- Insbesondere läßt sich dann auf einfache Weise das Erreichen des Gegenstands 16 durch den Stempel 18 ermitteln, nämlich wenn eine vollständige Beschattung (bezogen auf die Höhenrichtung 20) der Sensoreinrichtung 112 erreicht ist. In diesem Falle kann dann die Stempelverschiebungszeit auf einfache und direkte Weise ermittelt werden.
- Ansonsten funktioniert die Etikettiervorrichtung 108 wie oben anhand der Ausführungsbeispiele 10, 78 und 102 beschrieben.
- Es ist auch möglich, die Systemverschiebungszeit dadurch zu bestimmen, daß der Druckverlauf bzw. die Druckverhältnisse in einer der Druckkammern 30, 32 oder in beiden Druckkammern 30, 32 des Zylinders 26 gemessen werden. Darüber läßt sich dann ermitteln, ob sich der Stempel 18 noch bewegt oder in Ruhe ist.
- Es ist auch möglich, eine kapazitive Messung der Stempelverschiebungszeit durchzuführen, indem beispielsweise eine Kapazitätsmessung zwischen dem Zylinder 26 und der Kolbenstange 29 durchgeführt wird, wobei sich die Kapazität in Abhängigkeit von der Stellung des Stempels 18 verändert.
- Weiterhin ist es möglich, den Zylinder 26 mit einer Wicklung zu versehen und die induktive Ankopplung der Kolbenstange des Stempels 18 über diese Wicklung zu messen, wobei wiederum in Abhängigkeit der Stempelstellung sich die induktive Ankopplung ändert.
- Es kann auch ein Beschleunigungssensor vorgesehen sein, welcher auf das Auftreffen des Stempels 18 auf den Gegenstand 16 reagiert, um so die Stempelverschiebungszeit zu ermitteln.
- Alternativ kann ein Beschleunigungssensor auch an der verschieblichen Kolbenstange 29 angeordnet sein, wobei dann die entsprechenden Signale des Beschleunigungssensors drahtlos an eine Auswerteeinrichtung weitergeleitet werden.
- Auch über eine Auswertung einer Reaktionskraft des Stempels 18 beim Auftreffen auf den Gegenstand 18 mit Hilfe einer Kraftmeßeinrichtung wie beispielsweise ein Biegestab, welcher mit der Stempelvorrichtung 14 verbunden ist, läßt sich die Stempelverschiebungszeit bestimmen.
Claims (31)
- Etikettiervorrichtung für bewegte Gegenstände (16), mit einem Stempel (18), welcher verschieblich geführt ist und mittels welchem ein Etikett an einem Gegenstand (16) positionierbar ist,
dadurch gekennzeichnet , daß eine Meßvorrichtung (42) zur Bestimmung einer Stempelverschiebungszeit (TS) vorgesehen ist, wobei die Stempelverschiebungszeit (TS) durch die Zeitdauer der Bewegung des Stempels (18) auf den Gegenstand (16) zu bestimmt ist. - Etikettiervorrichtung nach Anspruch 1, dadurch gekennzeichnet, daß die Stempelverschiebungszeit (TS) bestimmt ist durch das Zeitintervall der Verschiebung des Stempels (18) aus einer Ausgangsstellung (40) bis zum Erreichen des Gegenstands (16).
- Etikettiervorrichtung nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß eine Etikettierzeit (TE) bestimmt ist durch die Summe einer Systemzeit (Tsys) und der Stempelverschiebungszeit (TS).
- Etikettiervorrichtung nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, daß durch die Meßvorrichtung (42) die Stempelverschiebungszeit (TS) kontinuierlich meßbar ist.
- Etikettiervorrichtung nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, daß die Meßvorrichtung (42) die Stempelverschiebungszeit (TS) berührungslos ermittelt.
- Etikettiervorrichtung nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, daß die Meßvorrichtung (42) eine Sensoreinrichtung (44; 86; 112) und eine Gebereinrichtung (54; 80; 110) umfaßt.
- Etikettiervorrichtung nach Anspruch 6, dadurch gekennzeichnet, daß die Sensoreinrichtung (44; 86) und Gebereinrichtung (54; 80) relativ zueinander verschieblich sind.
- Etikettiervorrichtung nach Anspruch 6 oder 7, dadurch gekennzeichnet, daß die Sensoreinrichtung (44; 86) oder Gebereinrichtung ortsfest bezüglich einer Haltervorrichtung (12) einer Stempelführung (38) angeordnet ist und die Gebereinrichtung (54; 80) oder Sensoreinrichtung mit dem Stempel (18) verschieblich ist.
- Etikettiervorrichtung nach einem der Ansprüche 6 bis 8, dadurch gekennzeichnet, daß die Meßvorrichtung (42) die Stempelverschiebungszeit (TS) über magnetische Kopplung zwischen Sensoreinrichtung (44) und Gebereinrichtung (54) ermittelt.
- Etikettiervorrichtung nach Anspruch 9, dadurch gekennzeichnet, daß die Gebereinrichtung einen Magneten (54) umfaßt und daß die Sensoreinrichtung (44) eine Mehrzahl von Hall-Sensoren (46) umfaßt.
- Etikettiervorrichtung nach Anspruch 10, dadurch gekennzeichnet, daß die Hall-Sensoren in mindestens einer Reihe (50, 52; A, B) angeordnet sind.
- Etikettiervorrichtung nach Anspruch 11, dadurch gekennzeichnet, daß die Hall-Sensoren in einer Reihe (50; 52; A; B) im wesentlichen parallel zu einer Verschiebungsrichtung (20) des Stempels (18) ausgerichtet sind.
- Etikettiervorrichtung nach einem der Ansprüche 10 bis 12, dadurch gekennzeichnet, daß die Hall-Sensoren (46) so angeordnet sind, daß bei der Bewegung des Stempels (18) stets mindestens ein Hall-Sensor (46) ein Schaltsignal liefert.
- Etikettiervorrichtung nach einem der Ansprüche 10 bis 13, dadurch gekennzeichnet, daß eine Auswerteeinrichtung (56; 68) der Meßvorrichtung (42) so beschaltet ist, daß das Signal jedes einzelnen Hall-Sensors (H1, ..., Hn) auswertbar ist.
- Etikettiervorrichtung nach Anspruch 14, dadurch gekennzeichnet, daß die Hall-Sensoren (46) so angeordnet und beschaltet sind, daß benachbarten Hall-Sensoren zugeordnete Signale zeitlich überlappen.
- Etikettiervorrichtung nach einem der Ansprüche 14 oder 15, dadurch gekennzeichnet, daß ein Zeitermittlungssignal während der Bewegung des Stempels (18) im gleichen Schaltzustand bleibt.
- Etikettiervorrichtung nach einem der Ansprüche 10 bis 13, dadurch gekennzeichnet, daß eine Mehrzahl von Reihen (A, B) von Hall-Sensoren (46) vorgesehen ist, wobei die Hall-Sensoren so angeordnet und beschaltet sind, daß in unterschiedlichen Reihen phasenverschobene Schaltsignale generierbar sind.
- Etikettiervorrichtung nach Anspruch 17, dadurch gekennzeichnet, daß die Hall-Sensoren (46) einer Reihe (A; B) gemeinsam geschaltet sind.
- Etikettiervorrichtung nach einem der Ansprüche 6 bis 8, dadurch gekennzeichnet, daß Sensoreinrichtung (86; 112) und Gebereinrichtung (80; 110) optisch gekoppelt sind.
- Etikettiervorrichtung nach Anspruch 19, dadurch gekennzeichnet, daß die Gebereinrichtung (80) mit einer längs der Bewegungsrichtung (20) des Stempels (18) ausgerichteten Codierung (82, 84) versehen ist, welche durch die Sensoreinrichtung (86) auslesbar ist.
- Etikettiervorrichtung nach Anspruch 20, dadurch gekennzeichnet, daß die Codierung (82, 84) ortsfest bezüglich des Stempels (18) angeordnet ist.
- Etikettiervorrichtung nach Anspruch 20 oder 21, dadurch gekennzeichnet, daß die Codierung Codierungsfelder (82, 84) aufweist, welche gleichmäßig beabstandet sind.
- Etikettiervorrichtung nach Anspruch 22, dadurch gekennzeichnet, daß die Sensoreinrichtung (86) zwei optische Sensoren (88, 90) umfaßt, welche im wesentlichen im halben Abstand der Codierungsfelder (82, 84) beabstandet sind.
- Etikettiervorrichtung nach Anspruch 19, dadurch gekennzeichnet, daß die Gebereinrichtung (110) einen Generator für ein Lichtfeld (116) umfaßt, wobei der Stempel (18) in das Lichtfeld (116) eintauchbar ist und das Lichtfeld (116) durch den Stempel (18) in Abhängigkeit von der Eintauchtiefe zumindest teilweise bezüglich einer Sensoreinrichtung (112) abschirmbar ist.
- Etikettiervorrichtung nach Anspruch 24, dadurch gekennzeichnet, daß durch die Sensoreinrichtung (112) die Abschirmung durch den Stempel (18) zeitlich bestimmbar ist.
- Etikettiervorrichtung nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, daß ein Abstandssensor (104) vorgesehen ist, welcher den Abstand des Stempels (18) zu einer Haltevorrichtung (12) des Stempels (18) mißt.
- Verfahren zur Etikettierung von bewegten Gegenständen mittels eines Stempels, dadurch gekennzeichnet, daß eine Stempelverschiebungszeit als Zeitdauer der Stempelbewegung von einer Ausgangsstellung bis zum Erreichen des Gegenstands gemessen wird.
- Verfahren nach Anspruch 27, dadurch gekennzeichnet, daß die Etikettierzeit als Summe einer Systemzeit und der Stempelverschiebungszeit bestimmt wird.
- Verfahren nach Anspruch 27 oder 28, dadurch gekennzeichnet, daß die ermittelte Stempelverschiebungszeit abgespeichert wird.
- Verfahren nach einem der Ansprüche 27 bis 29, dadurch gekennzeichnet, daß die Stempelverschiebungszeit kontinuierlich gemessen wird.
- Verfahren nach einem der Ansprüche 27 bis 30, dadurch gekennzeichnet, daß mittels der ermittelten Stempelverschiebungszeit die Auftreffenergie des Stempels auf den Gegenstand eingestellt wird.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10253843 | 2002-11-14 | ||
| DE10253843A DE10253843B3 (de) | 2002-11-14 | 2002-11-14 | Etikettiervorrichtung für bewegte Gegenstände und Verfahren zur Etikettierung von bewegten Gegenständen |
| PCT/EP2003/011973 WO2004043786A1 (de) | 2002-11-14 | 2003-10-29 | Etikettiervorrichtung für bewegte gegenstände und verfahren zur etikettierung von bewegten gegenständen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1569850A1 EP1569850A1 (de) | 2005-09-07 |
| EP1569850B1 true EP1569850B1 (de) | 2006-12-20 |
Family
ID=32087358
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP03773673A Expired - Lifetime EP1569850B1 (de) | 2002-11-14 | 2003-10-29 | Etikettiervorrichtung für bewegte gegenstände und verfa hren zur etikettierung von bewegten gegenständen |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7392833B2 (de) |
| EP (1) | EP1569850B1 (de) |
| JP (1) | JP4351633B2 (de) |
| AT (1) | ATE348759T1 (de) |
| DE (1) | DE10253843B3 (de) |
| WO (1) | WO2004043786A1 (de) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1895170B1 (de) * | 2005-06-21 | 2016-03-09 | ASA Electronics Industry Co., Ltd. | Zylindersteuerungseinheit |
| DE102005037728B3 (de) * | 2005-08-10 | 2007-01-25 | Wörtz, Reiner | Vorrichtung zum Aufbringen von Informationsträgern auf Waren |
| DE102006031577B4 (de) | 2006-06-30 | 2021-08-19 | Bizerba SE & Co. KG | Charakterisierungssystem für Gegenstände und Verfahren zur Zuführung von Gegenständen zu einer Charakterisierungseinrichtung |
| DE102006043537B4 (de) * | 2006-09-12 | 2016-09-29 | 3Py GmbH & Co. KG | Applikator für Etikettiermaschine und Verfahren zum Etikettieren |
| DE102009041470A1 (de) * | 2009-09-14 | 2011-03-24 | Bizerba Gmbh & Co Kg | Roboter mit Delta-Kinematik |
| DE102010055157A1 (de) * | 2010-12-18 | 2012-06-21 | Bizerba Gmbh & Co. Kg | Etikettiervorrichtung |
| JP5923161B2 (ja) | 2011-03-29 | 2016-05-24 | ヴィフォール (インターナショナル) アクチェンゲゼルシャフトVifor (International) AG | 鉄欠乏症状および鉄欠乏性貧血の治療および予防のための鉄(iii)錯体化合物 |
| US20140248342A1 (en) | 2011-05-31 | 2014-09-04 | Vifor (International) Ag | Fe(III) 2,4-Dioxo-1-Carbonyl Complexes For Treatment And Prophylaxis Of Iron Deficiency Symptoms And Iron Deficiency Anaemias |
| CN102991789A (zh) * | 2012-10-18 | 2013-03-27 | 苏州一致电子制程有限公司 | 多轴向贴标签机械手 |
| RU2641030C2 (ru) | 2012-12-21 | 2018-01-15 | Вифор (Интернациональ) Аг | Комплексные соединения трехвалентного железа для лечения и профилактики симптомов дефицита железа и железодефицитных анемий |
| US10919660B1 (en) * | 2019-07-30 | 2021-02-16 | Toshiba Tec Kabushiki Kaisha | Labeling apparatus |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3203162A1 (de) * | 1982-01-30 | 1983-08-11 | schäfer-etiketten GmbH & Co, 7441 Wolfschlugen | Verfahren und vorrichtung zum etikettieren von gegenstaenden |
| EP0090631A3 (de) * | 1982-03-26 | 1984-10-24 | Berkel Limited | Vorrichtung zum Anbringen von Etiketten |
| SE8504519L (sv) * | 1984-10-01 | 1986-04-02 | Ishida Scale Mfg Co Ltd | Anleggning for paketering, vegning och etikettering av foremal |
| US5232539A (en) * | 1991-02-22 | 1993-08-03 | Grand Rapids Label Company | Object labeling machine |
| DE19531426A1 (de) * | 1995-08-26 | 1997-02-27 | Espera Werke Gmbh | Vorrichtung zum Anbringen von Haftetiketten auf Warenpackungen |
| JP3075157B2 (ja) * | 1995-09-29 | 2000-08-07 | 株式会社寺岡精工 | 包装値付装置 |
| DE19642110C2 (de) * | 1996-10-12 | 1998-11-26 | Siemens Ag | Verfahren und Vorrichtung zum Etikettieren von flachen Sendungen |
| DE19952375A1 (de) * | 1999-10-30 | 2001-05-10 | Espera Werke Gmbh | Vorrichtung zum Anbringen von Haftetiketten auf Warenpackungen |
| JP4656360B2 (ja) * | 2001-04-16 | 2011-03-23 | 澁谷工業株式会社 | ラベル貼付システム |
-
2002
- 2002-11-14 DE DE10253843A patent/DE10253843B3/de not_active Expired - Lifetime
-
2003
- 2003-10-29 WO PCT/EP2003/011973 patent/WO2004043786A1/de active IP Right Grant
- 2003-10-29 AT AT03773673T patent/ATE348759T1/de not_active IP Right Cessation
- 2003-10-29 EP EP03773673A patent/EP1569850B1/de not_active Expired - Lifetime
- 2003-10-29 JP JP2004550712A patent/JP4351633B2/ja not_active Expired - Fee Related
-
2005
- 2005-05-12 US US11/127,653 patent/US7392833B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006506279A (ja) | 2006-02-23 |
| DE10253843B3 (de) | 2004-05-06 |
| US7392833B2 (en) | 2008-07-01 |
| ATE348759T1 (de) | 2007-01-15 |
| US20050205192A1 (en) | 2005-09-22 |
| WO2004043786A1 (de) | 2004-05-27 |
| EP1569850A1 (de) | 2005-09-07 |
| JP4351633B2 (ja) | 2009-10-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1569850B1 (de) | Etikettiervorrichtung für bewegte gegenstände und verfa hren zur etikettierung von bewegten gegenständen | |
| DE3789886T2 (de) | Regulierung von Seitenabweichungen eines Bandes. | |
| DE3204012C1 (de) | Inkrementale Messeinrichtung | |
| CH672383A5 (de) | ||
| DE202008017427U1 (de) | Vorrichtung zur Erzeugung eines Zeichens in einer Werkstückoberfläche durch Prägen | |
| WO1999062314A2 (de) | Verfahren und vorrichtung zum linearen positionieren und zur lageerkennung eines substrates | |
| DE102005047009A1 (de) | Absolutes Positionsmesssystem | |
| DE102008024104A1 (de) | Materialmarkensensor und Verfahren zum Erfassen einer Markierung auf oder in einem Material | |
| EP0783699B1 (de) | Aktiver bewegungssensor | |
| EP3499267A1 (de) | Triangulationslichttaster | |
| EP0116850A1 (de) | Mikroprozessorgesteuertes, einen optoelektronischen Sensor enthaltendes Tauchanker-Drucksystem | |
| EP3475027B1 (de) | Anlage zur bearbeitung von rondenteilen | |
| DE3209834C2 (de) | Vorrichtung zum Messen der Verschiebung eines Druckkolbens und einer Kolbenstange einer Druckgießmaschine | |
| EP3663722B1 (de) | Verfahren zur automatischen kalibrierung eines magnetischen sensors und magnetischer sensor | |
| DE19621015C2 (de) | Verfahren und Vorrichtung zur Positionierung von bewegten Maschinenteilen | |
| DE19903644C1 (de) | Einrichtung zur Positionserfassung | |
| DE202010013067U1 (de) | Kniehebelpresse mit Verstellvorrichtung für ein Werkzeugteil | |
| DE102009048272B3 (de) | Verfahren zum Positionieren eines magnetischen Sensors | |
| DE102017123018B4 (de) | Aktive führungserfassungsvorrichtung | |
| DE3622845A1 (de) | Verfahren und geraet zum automatischen ausstanzen von gedruckten teilen aus werkstueckplatten | |
| DE3522809C2 (de) | ||
| EP1154260A2 (de) | Abtastverfahren und Abtastvorrichtung zur optischen Dichtemessung | |
| DE202016100802U1 (de) | Etikettiervorrichtung für Selbstklebeetiketten | |
| DE202009006483U1 (de) | Vorrichtung zur Erzeugung eines Zeichens in einer Werkstückoberfläche durch Prägen | |
| DE10023127B4 (de) | Verfahren zum Betreiben einer Abtastvorrichtung zur optischen Dichtemessung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20050421 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK |
|
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AT BE BG CH CY CZ DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT RO SE SI SK TR |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: 8566 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT RO SE SI SK TR |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061220 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061220 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061220 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061220 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061220 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061220 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061220 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20070110 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070320 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070320 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070424 |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20070921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070321 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20071031 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20071031 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20071031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061220 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20071029 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20071029 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061220 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061220 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070621 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 13 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 15 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20191022 Year of fee payment: 17 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20191022 Year of fee payment: 17 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MM Effective date: 20201101 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20201031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201031 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20221020 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20221031 Year of fee payment: 20 Ref country code: GB Payment date: 20221024 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: PE20 Expiry date: 20231028 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20231028 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20231028 |