EP1199622A1 - Bedienungselement - Google Patents
Bedienungselement Download PDFInfo
- Publication number
- EP1199622A1 EP1199622A1 EP01122079A EP01122079A EP1199622A1 EP 1199622 A1 EP1199622 A1 EP 1199622A1 EP 01122079 A EP01122079 A EP 01122079A EP 01122079 A EP01122079 A EP 01122079A EP 1199622 A1 EP1199622 A1 EP 1199622A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- element according
- platform
- control element
- control
- connecting elements
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005259 measurement Methods 0.000 claims abstract description 6
- 238000006073 displacement reaction Methods 0.000 claims abstract description 4
- 241000238631 Hexapoda Species 0.000 claims description 23
- 238000005452 bending Methods 0.000 claims description 17
- 238000011156 evaluation Methods 0.000 claims description 16
- 238000010168 coupling process Methods 0.000 claims description 12
- 230000008878 coupling Effects 0.000 claims description 11
- 238000005859 coupling reaction Methods 0.000 claims description 11
- 230000004913 activation Effects 0.000 claims description 7
- 230000008859 change Effects 0.000 claims description 4
- 238000000034 method Methods 0.000 abstract description 3
- 230000006835 compression Effects 0.000 abstract 1
- 238000007906 compression Methods 0.000 abstract 1
- 238000012545 processing Methods 0.000 description 5
- 230000003750 conditioning effect Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000011161 development Methods 0.000 description 3
- 230000018109 developmental process Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000012549 training Methods 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 239000013598 vector Substances 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000003811 finger Anatomy 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000005693 optoelectronics Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
- G05G9/04737—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks with six degrees of freedom
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20012—Multiple controlled elements
- Y10T74/20201—Control moves in two planes
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20213—Interconnected
Abstract
Description
- Fig. 1
- die perspektivische Darstellung eines ersten erfindungsgemäßen Bedienungselements, das an einer Fahrzeugkonsole montiert ist,
- Fig. 2
- die Heckansicht eines Traktors mit einer Anbauschnittstelle zur Kopplung von Arbeitsgeräten und einem erfindungsgemäßen Bedienungselement,
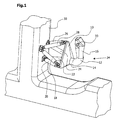
- Fig. 3
- die perspektivische Darstellung eines zweiten erfindungsgemäßen Bedienungselements, das auf einer Befestigungsplatte montiert ist, und
- Fig. 4
- eine elektrische Schaltungsanordnung für die Messsignalverarbeitung.
Claims (22)
- Bedienungselement zur Ansteuerung räumlicher Bewegungsabläufe eines zu steuernden Systems (36)mit einer von einer Bedienungsperson betätigbaren an einer Plattform (10, 60) befestigten Handhabe (12, 78),mit wenigstens sechs zwischen der Plattform (10, 60) und einer feststehenden Konsole (30, 62) angeordneten Verbindungselementen (18, 20, 22, 24, 26, 28; 64, 66, 68, 70, 72, 74),mit Wegmessgebern zur Erfassung der Längenänderung der Verbindungselemente (18, 20, 22, 24, 26, 28) und/oder mit Kraftmessgebern (84) zur Erfassung der in den Verbindungselementen (64, 66, 68, 70, 72, 74) wirkenden Zug- und Druckkräfte, undmit einer Auswerteeinheit (32, 108) zur Auswertung der Messsignale und zur Bereitstellung von Ansteuersignalen für die räumlichen Bewegungsabläufe.
- Bedienungselement nach Anspruch 1, dadurch gekennzeichnet, dass die Verbindungselemente (18, 20, 22, 24, 26, 28; 64, 66, 68, 70, 72, 74) nach Art eines Hexapoden angeordnet sind.
- Bedienungselement nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass Verbindungselemente (18, 20, 22, 24, 26, 28) teleskopartig ausgebildet sind.
- Bedienungselement nach einem der Ansprüche 1 bis 3,
dadurch gekennzeichnet, dass Verbindungselemente (64, 66, 68, 70, 72, 74) in ihrer Längserstreckung im wesentlichen starr ausgebildet sind. - Bedienungselement nach einem der Ansprüche 1 bis 4,
dadurch gekennzeichnet, dass die Angriffspunkte der Verbindungselemente (18, 22, 24, 26, 28; 64, 66, 68, 70, 72, 74) an der Plattform (10, 60) und/oder an der Konsole (30, 62) jeweils im Bereich der Ecken eines im wesentlichen gleichseitigen Dreiecks liegen und dass im Bereich jeder der drei Ecken jeweils zwei Verbindungselemente (18, 20, 22, 24, 26, 28; 64, 66, 68, 70, 72, 74) angreifen. - Bedienungselement nach einem der Ansprüche 1 bis 5,
dadurch gekennzeichnet, dass die Verbindungselemente (18, 22, 24, 26, 28; 64, 66, 68, 70, 72, 74) gelenkig mit der Plattform (10, 60) und/oder gelenkig mit der Konsole (30) verbunden sind. - Bedienungselement nach einem der Ansprüche 1 bis 5,
dadurch gekennzeichnet, dass die Verbindungselemente (64, 66, 68, 70, 72, 74) starr an der Konsole (62) befestigt sind. - Bedienungselement nach einem der Ansprüche 6 bis 7,
dadurch gekennzeichnet, dass die gelenkige Verbindung zwischen einem Verbindungselement (64, 66, 68, 70, 72, 74) und der Plattform (60) durch ein oder mehrere gummiartige Elemente (76) gebildet wird. - Bedienungselement nach einem der Ansprüche 1 bis 8,
dadurch gekennzeichnet, dass die Plattform (60) Biegeelemente (80) enthält, an denen jeweils ein starres Verbindungselement (64, 66, 68, 70, 72, 74) angreift und die sich bei Kraft- oder Momentbelastungen der Handhabe (78) verbiegen. - Bedienungselement nach Anspruch 9, dadurch gekennzeichnet, dass die Biegeelemente (80) stab- oder laschenförmig ausgebildet und mit wenigstens einem Ende starr mit der Plattform (60) verbunden sind und dass die Biegeelemente (80) quer zur Längserstreckung der Verbindungselemente (64, 66, 68, 70, 72, 74) ausgerichtet sind.
- Bedienungselement nach Anspruch 9 oder 10, dadurch gekennzeichnet, dass bei einer Plattform (60), an deren Ecken zwei oder mehr Verbindungselemente (64, 66, 68, 70, 72, 74) angreifen, im Bereich wenigstens einer Ecke zwei oder mehr nebeneinander verlaufende, als Biegeelement ausgebildete Stäbe oder Laschen (80) vorgesehen sind und dass an jedem Stab oder jeder Lasche (80) ein Verbindungselement (64, 66, 68, 70, 72, 74) angreift.
- Bedienungselement nach einem der Ansprüche 9 bis 11, dadurch gekennzeichnet, dass wenigstens auf der Oberseite oder auf der Unterseite der Biegeelemente (80) im Bereich zwischen der Befestigungsstelle des Verbindungselements (64, 66, 68, 70, 72, 74) und dem mittleren Bereich der Plattform (60) ein im wesentlichen in radialer Richtung ausgerichteter Dehnmessstreifen (84, 86) angeordnet ist.
- Bedienungselement nach einem der Ansprüche 9 bis 12, dadurch gekennzeichnet, dass auf der Oberseite und der Unterseite eines Biegeelements (80) je wenigstens ein Dehnmessstreifen (84, 86) angeordnet ist und dass je ein Dehnmessstreifen (84, 86) der Oberseite und der Unterseite zu einer Halbbrücke verschaltet sind.
- Bedienungselement nach einem der Ansprüche 1 bis 13, dadurch gekennzeichnet, dass auf der Plattform (60) Kraftmesselemente (80) und eine zugehörige Auswerteelektronik (108) angeordnet ist.
- Bedienungselement nach einem der Ansprüche 1 bis 14, dadurch gekennzeichnet, dass die Handhabe (12, 78) nach Art eines Joysticks ausgebildet ist.
- Bedienungselement nach einem der Ansprüche 1 bis 15, dadurch gekennzeichnet, dass die Handhabe (12, 78) ein von der Plattform (10, 60) abstehender Hebel ist, dessen freies Ende (16) im wesentlichen nach oben gerichtet ist.
- Bedienungselement nach einem der Ansprüche 1 bis 16, dadurch gekennzeichnet, dass im Bereich des freien Endes (16) der Handhabe (12, 78) wenigstens ein Steuerelement, wie Schalter, Druckknopf (33), Rolle oder Aktivierungsklappe, angeordnet ist.
- Bedienungselement nach einem der Ansprüche 1 bis 17, dadurch gekennzeichnet, dass die Auswerteeinheit (108) eine nichtlineare Ausgangskennlinie bereitstellt.
- Bedienungselement nach einem der Ansprüche 2 bis 18, dadurch gekennzeichnet, dass von der Auswerteeinheit (32, 108) Steuersignale für ein als Hexapod ausgebildetes zu steuerndes System (36) gebildet werden.
- Bedienungselement nach einem der Ansprüche 2 bis 19, dadurch gekennzeichnet, dass die Geometrie eines Bedienungselement-Hexapoden und die Geometrie eines Hexapoden des zu steuernden Systems (36) zueinander ähnlich sind.
- Bedienungselement nach einem der Ansprüche 1 bis 20, dadurch gekennzeichnet, dass die von der Auswerteeinheit (32, 108) erzeugten Steuersignale der Ansteuerung der Koppeleinrichtung, beispielsweise des Kopplungsdreiecks (38), einer Fahrzeuganbauvorrichtung (36) dienen.
- Bedienungselement nach einem der Ansprüche 1 bis 21, dadurch gekennzeichnet, dass die Konsole (30, 62) Teil eines Fahrzeugstands ist und das Bedienungselement (30, 78) der Steuerung von Fahrzeugkomponenten (36) dient.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10052050 | 2000-10-20 | ||
| DE2000152050 DE10052050A1 (de) | 2000-10-20 | 2000-10-20 | Bedienungselement |
| DE2001111609 DE10111609A1 (de) | 2001-03-10 | 2001-03-10 | Bedienungselement |
| DE10111609 | 2001-03-10 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1199622A1 true EP1199622A1 (de) | 2002-04-24 |
| EP1199622B1 EP1199622B1 (de) | 2007-12-12 |
Family
ID=26007434
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP01122079A Expired - Lifetime EP1199622B1 (de) | 2000-10-20 | 2001-09-14 | Bedienungselement |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6681880B2 (de) |
| EP (1) | EP1199622B1 (de) |
| BR (1) | BR0104622A (de) |
| DE (1) | DE50113363D1 (de) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1876505A1 (de) | 2006-07-03 | 2008-01-09 | Force Dimension S.à.r.l | Schwerkraftausgleich für eine haptische Vorrichtung |
| US8667860B2 (en) | 2006-07-03 | 2014-03-11 | Force Dimension S.A.R.L. | Active gripper for haptic devices |
| CN105415350A (zh) * | 2016-01-06 | 2016-03-23 | 武汉穆特科技有限公司 | 并联三自由度力反馈手柄 |
Families Citing this family (59)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB0026357D0 (en) * | 2000-10-27 | 2000-12-13 | Makex Ltd | Improvements in parallel link machine design |
| US8414505B1 (en) | 2001-02-15 | 2013-04-09 | Hansen Medical, Inc. | Catheter driver system |
| US6741912B2 (en) * | 2001-07-02 | 2004-05-25 | Microbotic A/S | Flexible tool for handling small objects |
| WO2003088204A1 (en) * | 2002-04-12 | 2003-10-23 | Obermeyer Henry K | Multi-axis joystick and transducer means therefore |
| US6948398B2 (en) * | 2002-07-22 | 2005-09-27 | Deere & Company | Joystick with enabling sensors |
| DE10344029A1 (de) * | 2003-09-23 | 2005-04-14 | Still Gmbh | Multifunktionshebel und Bedieneinheit für ein Flurförderzeug |
| US8069927B2 (en) * | 2004-07-28 | 2011-12-06 | Caterpillar Inc. | Rear-mounted work implement control system |
| DE102005019321A1 (de) * | 2005-04-26 | 2006-11-02 | Still Gmbh | Flurförderzeug mit einem Multifunktionshebel |
| US8392075B2 (en) * | 2008-02-25 | 2013-03-05 | Clark Equipment Company | Carrier and backhoe control system and method |
| US20090248042A1 (en) * | 2008-03-27 | 2009-10-01 | Kirschenman Mark B | Model catheter input device |
| US9161817B2 (en) | 2008-03-27 | 2015-10-20 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US8219909B2 (en) * | 2009-01-26 | 2012-07-10 | Honeywell International Inc. | Human-machine interface with integrated position sensors and passive haptic feedback devices |
| US20130317519A1 (en) | 2012-05-25 | 2013-11-28 | Hansen Medical, Inc. | Low friction instrument driver interface for robotic systems |
| US9026312B2 (en) | 2012-08-29 | 2015-05-05 | Caterpillar Inc. | Ergonomics test buck |
| US9668814B2 (en) | 2013-03-07 | 2017-06-06 | Hansen Medical, Inc. | Infinitely rotatable tool with finite rotating drive shafts |
| US11213363B2 (en) | 2013-03-14 | 2022-01-04 | Auris Health, Inc. | Catheter tension sensing |
| US9498601B2 (en) | 2013-03-14 | 2016-11-22 | Hansen Medical, Inc. | Catheter tension sensing |
| US9326822B2 (en) | 2013-03-14 | 2016-05-03 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US20140277334A1 (en) | 2013-03-14 | 2014-09-18 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9173713B2 (en) | 2013-03-14 | 2015-11-03 | Hansen Medical, Inc. | Torque-based catheter articulation |
| US20140276936A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Active drive mechanism for simultaneous rotation and translation |
| US9408669B2 (en) | 2013-03-15 | 2016-08-09 | Hansen Medical, Inc. | Active drive mechanism with finite range of motion |
| US20140276647A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Vascular remote catheter manipulator |
| US9452018B2 (en) | 2013-03-15 | 2016-09-27 | Hansen Medical, Inc. | Rotational support for an elongate member |
| US9213333B2 (en) * | 2013-06-06 | 2015-12-15 | Caterpillar Inc. | Remote operator station |
| CN111166274A (zh) | 2013-10-24 | 2020-05-19 | 奥瑞斯健康公司 | 机器人辅助腔内外科手术系统及相关方法 |
| GB201322746D0 (en) * | 2013-12-20 | 2014-02-05 | Agco Int Gmbh | Agricultural implement connection control |
| US10046140B2 (en) | 2014-04-21 | 2018-08-14 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| US10569052B2 (en) | 2014-05-15 | 2020-02-25 | Auris Health, Inc. | Anti-buckling mechanisms for catheters |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| CN113229942A (zh) | 2015-09-09 | 2021-08-10 | 奥瑞斯健康公司 | 手术器械装置操纵器 |
| US10639108B2 (en) | 2015-10-30 | 2020-05-05 | Auris Health, Inc. | Process for percutaneous operations |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US9983578B2 (en) * | 2016-04-20 | 2018-05-29 | Caterpillar Inc. | Remote operator station for a machine |
| US11209121B2 (en) * | 2016-04-26 | 2021-12-28 | The Boeing Company | Lifting support device and method of controlling operation |
| US10454347B2 (en) | 2016-04-29 | 2019-10-22 | Auris Health, Inc. | Compact height torque sensing articulation axis assembly |
| US9889874B1 (en) * | 2016-08-15 | 2018-02-13 | Clause Technology | Three-axis motion joystick |
| US9823686B1 (en) * | 2016-08-15 | 2017-11-21 | Clause Technology | Three-axis motion joystick |
| US11241559B2 (en) | 2016-08-29 | 2022-02-08 | Auris Health, Inc. | Active drive for guidewire manipulation |
| WO2018044306A1 (en) | 2016-08-31 | 2018-03-08 | Auris Surgical Robotics, Inc. | Length conservative surgical instrument |
| US10543048B2 (en) | 2016-12-28 | 2020-01-28 | Auris Health, Inc. | Flexible instrument insertion using an adaptive insertion force threshold |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| DE102017209707A1 (de) * | 2017-06-08 | 2018-12-13 | Kässbohrer Geländefahrzeug AG | Vorrichtung zur Steuerung von Bewegungen eines front- oder heckseitigen Anbaugeräts einer Pistenraupe und Pistenraupe |
| US11026758B2 (en) | 2017-06-28 | 2021-06-08 | Auris Health, Inc. | Medical robotics systems implementing axis constraints during actuation of one or more motorized joints |
| KR102462568B1 (ko) | 2017-12-11 | 2022-11-04 | 아우리스 헬스, 인코포레이티드 | 기구 기반 삽입 아키텍처를 위한 시스템 및 방법 |
| JP7322026B2 (ja) | 2017-12-14 | 2023-08-07 | オーリス ヘルス インコーポレイテッド | 器具の位置推定のシステムおよび方法 |
| AT520763B1 (de) * | 2017-12-21 | 2022-09-15 | Hans Kuenz Gmbh | Kransteuerung |
| WO2019143458A1 (en) | 2018-01-17 | 2019-07-25 | Auris Health, Inc. | Surgical robotics systems with improved robotic arms |
| CN112384121A (zh) | 2018-06-27 | 2021-02-19 | 奥瑞斯健康公司 | 用于医疗器械的对准系统和附接系统 |
| EP3856001A4 (de) | 2018-09-28 | 2022-06-22 | Auris Health, Inc. | Vorrichtungen, systeme und verfahren zum manuellen und robotischen antrieb medizinischer instrumente |
| WO2020197671A1 (en) | 2019-03-22 | 2020-10-01 | Auris Health, Inc. | Systems and methods for aligning inputs on medical instruments |
| US11896330B2 (en) | 2019-08-15 | 2024-02-13 | Auris Health, Inc. | Robotic medical system having multiple medical instruments |
| US11737845B2 (en) | 2019-09-30 | 2023-08-29 | Auris Inc. | Medical instrument with a capstan |
| EP4084717A4 (de) | 2019-12-31 | 2024-02-14 | Auris Health Inc | Dynamisches riemenscheibensystem |
| US11439419B2 (en) | 2019-12-31 | 2022-09-13 | Auris Health, Inc. | Advanced basket drive mode |
| USD1014568S1 (en) | 2022-02-14 | 2024-02-13 | Techtronic Cordless Gp | Lawn mower |
| USD1015381S1 (en) | 2022-02-14 | 2024-02-20 | Techtronic Cordless Gp | Lawn mower |
| US11789540B1 (en) | 2022-11-23 | 2023-10-17 | Kostal Of America, Inc. | Touch surface controller |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4125271A (en) * | 1976-06-11 | 1978-11-14 | Ro-Wi Rosenberg & Wilboltt I/S | Tool suspension |
| DE3504464C1 (de) | 1985-02-09 | 1986-04-17 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V., 8000 München | Transportables Meßgerät zur Überprüfung der Positioniergenauigkeit eines programmgesteuerten Gerätearmes |
| US4589810A (en) * | 1982-10-30 | 1986-05-20 | Deutsche Forschungs- Und Versuchsanstalt Fuer Luft- Und Raumfahrt E.V. | Device for programming movements of a robot |
| US4641123A (en) * | 1984-10-30 | 1987-02-03 | Rca Corporation | Joystick control |
| US5451134A (en) * | 1991-10-22 | 1995-09-19 | Bryfogle; Mark D. | Material handling devices and controllers |
| US5767840A (en) * | 1996-06-28 | 1998-06-16 | International Business Machines Corporation | Six-degrees-of-freedom movement sensor having strain gauge mechanical supports |
| DE19720049A1 (de) | 1997-05-14 | 1998-11-19 | Leitz Brown & Sharpe Mestechni | Verfahren zur Steuerung eines motorischen Koordinatenmeßgerätes sowie Koordinatenmeßgerät zur Durchführung des Verfahrens |
| EP0981078A2 (de) | 1998-08-17 | 2000-02-23 | Deere & Company | Handbedienungselement |
| DE19951840A1 (de) | 1999-10-28 | 2001-05-10 | Deere & Co | Anbauschnittstelle zur Kopplung von Arbeitsgeräten an ein Arbeitsfahrzeug |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3091130A (en) * | 1960-06-27 | 1963-05-28 | Morse Instr Co | Single lever control for multiple actions |
| US3432184A (en) | 1967-07-10 | 1969-03-11 | United States Steel Corp | Power actuated tractor hitch |
| US3904042A (en) * | 1974-02-25 | 1975-09-09 | Westinghouse Electric Corp | Manipulator apparatus |
| US4091234A (en) * | 1977-03-30 | 1978-05-23 | Atari, Inc. | Joystick with attached circuit elements |
| US4216467A (en) * | 1977-12-22 | 1980-08-05 | Westinghouse Electric Corp. | Hand controller |
| US4422345A (en) * | 1981-09-11 | 1983-12-27 | Deere & Company | Two-way control lever rotatable in cab wall for sound sealing |
| GB2183795B (en) * | 1985-12-03 | 1989-10-04 | Kubota Ltd | Valve control structure for working vehicle |
| JPS62235615A (ja) * | 1986-04-04 | 1987-10-15 | Mitsubishi Precision Co Ltd | 6軸制御操縦装置 |
| DE3824296A1 (de) * | 1987-11-30 | 1989-06-01 | Remote Control Systems Rcs | Vorrichtung zum schalten eines kraftfahrzeuggetriebes |
| US5116180A (en) * | 1988-07-18 | 1992-05-26 | Spar Aerospace Limited | Human-in-the-loop machine control loop |
| US4962448A (en) * | 1988-09-30 | 1990-10-09 | Demaio Joseph | Virtual pivot handcontroller |
| US5107080A (en) * | 1989-12-01 | 1992-04-21 | Massachusetts Institute Of Technology | Multiple degree of freedom damped hand controls |
| US5223776A (en) * | 1990-12-31 | 1993-06-29 | Honeywell Inc. | Six-degree virtual pivot controller |
| US5286024A (en) * | 1991-03-20 | 1994-02-15 | Atari Games Corporation | System for sensing the position of a joystick |
| US5263382A (en) * | 1992-04-13 | 1993-11-23 | Hughes Aircraft Company | Six Degrees of freedom motion device |
| US5767839A (en) * | 1995-01-18 | 1998-06-16 | Immersion Human Interface Corporation | Method and apparatus for providing passive force feedback to human-computer interface systems |
| WO1995027890A1 (en) * | 1994-04-11 | 1995-10-19 | Peter Neltoft | Device for use in manual control of the movement of a real or imaginary object |
| US5675359A (en) * | 1995-01-13 | 1997-10-07 | Advanced Technology Systems, Inc. | Joystick controller |
| US5589854A (en) * | 1995-06-22 | 1996-12-31 | Tsai; Ming-Chang | Touching feedback device |
| JPH09285988A (ja) | 1995-12-29 | 1997-11-04 | Daewoo Electronics Co Ltd | ワイヤ及びスプールを用いた6自由度運動及びフォースフィードバック可能なマニピュレータ |
| WO1998025193A1 (de) | 1996-12-04 | 1998-06-11 | Martin Sundin | Lagemessvorrichtung zur ermittlung von auslenkungen mit mindestens drei freiheitsgraden |
| US5854622A (en) * | 1997-01-17 | 1998-12-29 | Brannon; Daniel J. | Joystick apparatus for measuring handle movement with six degrees of freedom |
| US6129155A (en) * | 1998-12-02 | 2000-10-10 | Caterpillar Inc. | Method and apparatus for controlling a work implement having multiple degrees of freedom |
| KR100334902B1 (ko) * | 1999-12-06 | 2002-05-04 | 윤덕용 | 정밀작업용 6자유도 병렬기구 |
-
2001
- 2001-09-14 EP EP01122079A patent/EP1199622B1/de not_active Expired - Lifetime
- 2001-09-14 DE DE50113363T patent/DE50113363D1/de not_active Expired - Fee Related
- 2001-10-15 US US09/977,437 patent/US6681880B2/en not_active Expired - Fee Related
- 2001-10-19 BR BR0104622-5A patent/BR0104622A/pt not_active IP Right Cessation
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4125271A (en) * | 1976-06-11 | 1978-11-14 | Ro-Wi Rosenberg & Wilboltt I/S | Tool suspension |
| US4589810A (en) * | 1982-10-30 | 1986-05-20 | Deutsche Forschungs- Und Versuchsanstalt Fuer Luft- Und Raumfahrt E.V. | Device for programming movements of a robot |
| US4641123A (en) * | 1984-10-30 | 1987-02-03 | Rca Corporation | Joystick control |
| DE3504464C1 (de) | 1985-02-09 | 1986-04-17 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V., 8000 München | Transportables Meßgerät zur Überprüfung der Positioniergenauigkeit eines programmgesteuerten Gerätearmes |
| US5451134A (en) * | 1991-10-22 | 1995-09-19 | Bryfogle; Mark D. | Material handling devices and controllers |
| US5767840A (en) * | 1996-06-28 | 1998-06-16 | International Business Machines Corporation | Six-degrees-of-freedom movement sensor having strain gauge mechanical supports |
| DE19720049A1 (de) | 1997-05-14 | 1998-11-19 | Leitz Brown & Sharpe Mestechni | Verfahren zur Steuerung eines motorischen Koordinatenmeßgerätes sowie Koordinatenmeßgerät zur Durchführung des Verfahrens |
| EP0981078A2 (de) | 1998-08-17 | 2000-02-23 | Deere & Company | Handbedienungselement |
| DE19951840A1 (de) | 1999-10-28 | 2001-05-10 | Deere & Co | Anbauschnittstelle zur Kopplung von Arbeitsgeräten an ein Arbeitsfahrzeug |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1876505A1 (de) | 2006-07-03 | 2008-01-09 | Force Dimension S.à.r.l | Schwerkraftausgleich für eine haptische Vorrichtung |
| WO2008003417A1 (en) * | 2006-07-03 | 2008-01-10 | Force Dimension S.A.R.L. | Haptic device gravity compensation |
| US8188843B2 (en) | 2006-07-03 | 2012-05-29 | Force Dimension S.A.R.L. | Haptic device gravity compensation |
| US8667860B2 (en) | 2006-07-03 | 2014-03-11 | Force Dimension S.A.R.L. | Active gripper for haptic devices |
| CN105415350A (zh) * | 2016-01-06 | 2016-03-23 | 武汉穆特科技有限公司 | 并联三自由度力反馈手柄 |
Also Published As
| Publication number | Publication date |
|---|---|
| BR0104622A (pt) | 2002-05-28 |
| DE50113363D1 (de) | 2008-01-24 |
| US20020117017A1 (en) | 2002-08-29 |
| US6681880B2 (en) | 2004-01-27 |
| EP1199622B1 (de) | 2007-12-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1199622A1 (de) | Bedienungselement | |
| EP0097191B1 (de) | Montageroboter | |
| DE102015004483B4 (de) | Robotersteuerung und Robotersystem zum Bewegen eines Roboters als Reaktion auf eine Kraft | |
| EP1980441B1 (de) | Steuerknüppel für ein Fahrzeug | |
| EP1506115B1 (de) | Kraftunterstützungsmodul zur bereitstellung einer lastabhängigen unterstützungskraft | |
| EP1252806A2 (de) | Anbauschnittstelle zwischen Arbeitsfahrzeug und Arbeitsgeräten sowie Steuereinrichtung | |
| DE4005343A1 (de) | Handregler zur steuerung von bewegungen eines mechanismus | |
| DE102015214170A1 (de) | Roboter mit einer Kraftmesseinrichtung | |
| DE102020203545A1 (de) | Wählbares geschwindigkeits- oder positionsbasiertes steuersystem für ein arbeitsfahrzeug | |
| DE4334069A1 (de) | Ausbalancierbares Stativ | |
| EP0892256A1 (de) | Einrichtung zur Gewichtsbestimmung von angelenkten Lasten | |
| DE102007001435A1 (de) | Einstellbare Lenksäulenanordnung | |
| EP1609346B1 (de) | Bewegliches Schnittstellensystem mit mehreren Freiheitsgraden | |
| EP1694162A1 (de) | Bewegbares möbelteil | |
| EP3343311B1 (de) | Bedienhebel mit aktiver rückmeldeeinheit | |
| DE102010052237B4 (de) | Griff zur Erfassung einer Kraft auf der Grundlage einer Lichtschranke und Verwendungsverfahren | |
| WO2019110051A1 (de) | Anordnung für ein messsystem zum messen an einem messobjekt und verfahren zum messen an einem messobjekt mittels eines messsystems | |
| DE19625497C1 (de) | Bedienelementanordnung zur Steuerung der Längs- und der Querbewegung eines Kraftfahrzeuges | |
| DE102006053408A1 (de) | Pedal für ein Fahrzeug | |
| EP2378924B1 (de) | Auslösesensor für einen möbelantrieb | |
| DE102018127921A1 (de) | Roboter und Verfahren zur Bestimmung eines Bewegungsraums mittels eines Roboters | |
| DE60025235T2 (de) | System zur anpassung der steuerkraftgradienten eines steuerknüppels | |
| DE10111609A1 (de) | Bedienungselement | |
| EP1684159A2 (de) | Mobile haptische Schnittstelle | |
| DE102020206568B4 (de) | Programmiersystem zum handgeführten Programmieren einer Bewegung eines Industrieroboters, Industrieroboter mit einem solchen Programmiersystem und Verfahren zum handgeführten Programmieren einer Bewegung eines Industrieroboters |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE TR Kind code of ref document: A1 Designated state(s): DE FR GB IT |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 20021024 |
|
| AKX | Designation fees paid |
Free format text: DE FR GB IT |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB IT |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REF | Corresponds to: |
Ref document number: 50113363 Country of ref document: DE Date of ref document: 20080124 Kind code of ref document: P |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20080207 |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20080915 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20080925 Year of fee payment: 8 Ref country code: FR Payment date: 20080917 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20080929 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20080820 Year of fee payment: 8 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20090914 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20100531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20090930 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100401 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20090914 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20090914 |